
Optimal Vehicle Scheduling and Charging Infrastructure Planning for Autonomous Modular Transit System



Abstract
1. Introduction
2. Literature Review
2.1. Integrated Optimization of Vehicle Dispatching and Charging Infrastructure Configuration
2.2. Flexible Capacity Design for Transit Services
3. Methodology
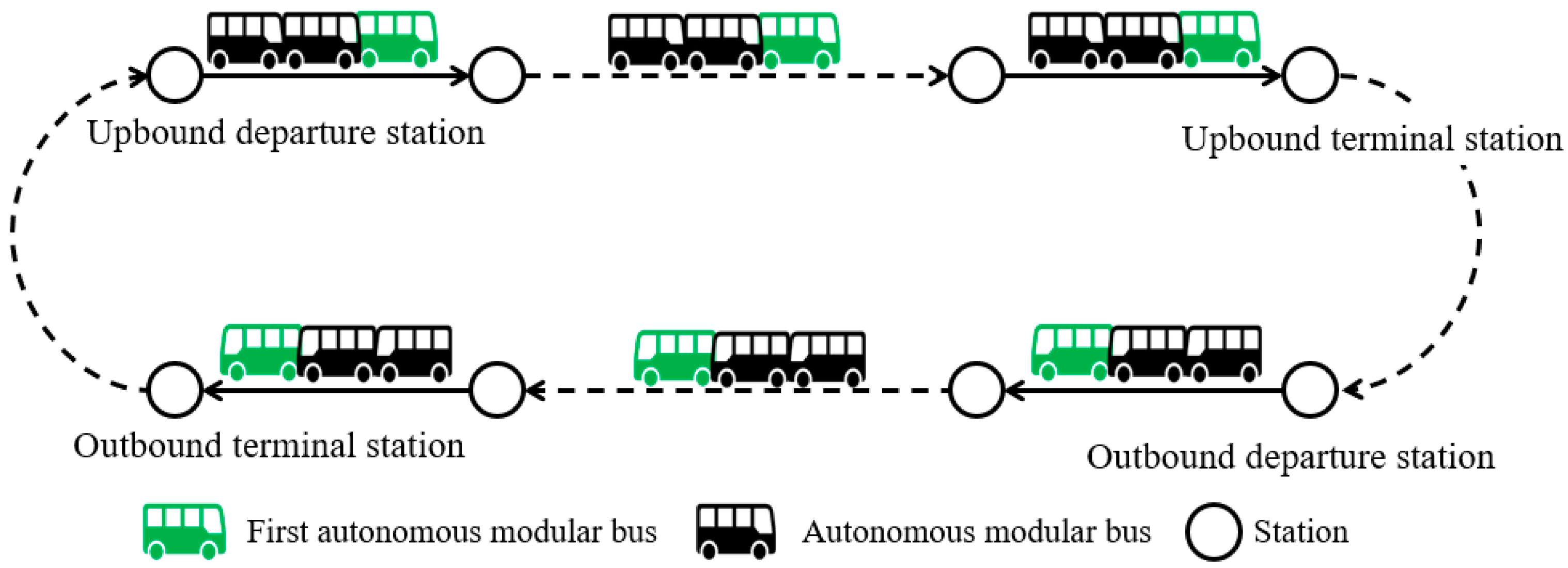
3.1. Problem Description
3.2. Battery State of Charge of Autonomous Modular Bus Calculation
3.3. Objective Function Formulation
- (1)
- Charger deployment costs calculation
- (2)
- AMB body acquisition costs calculation
- (3)
- Battery acquisition costs calculation
- (4)
- Charging costs calculation
3.4. Model Formulation
3.5. Solution Algorithm
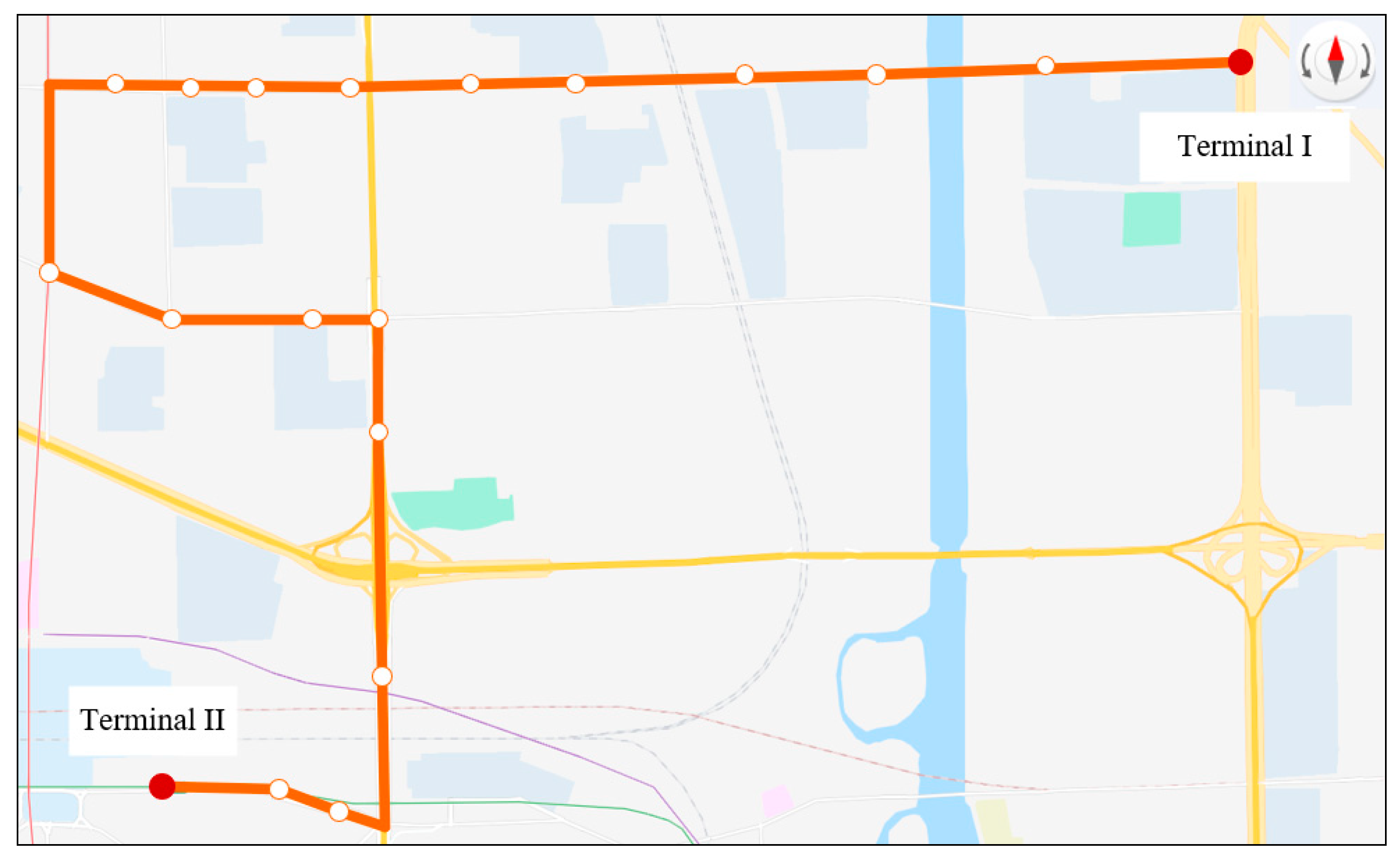
4. Case Study
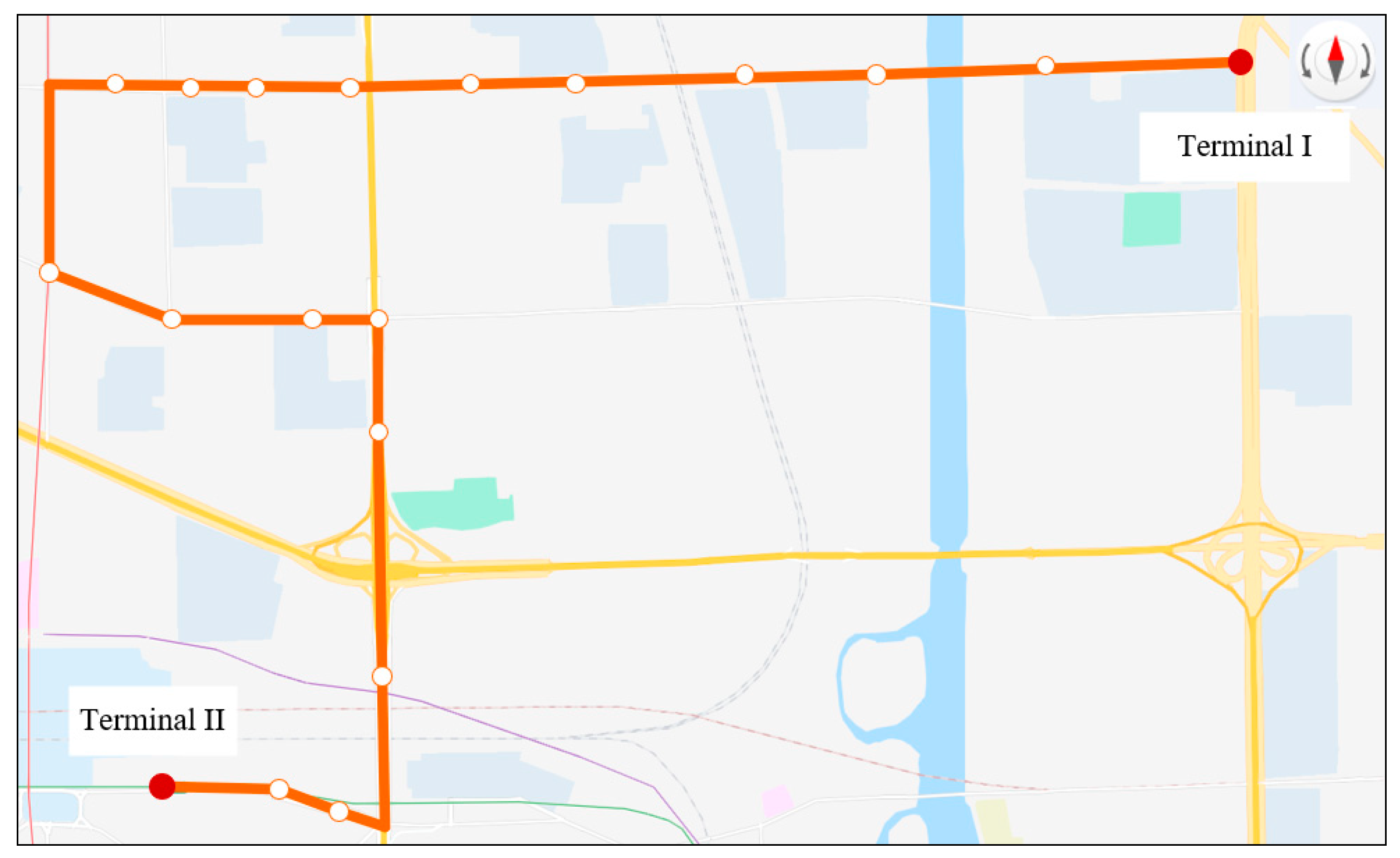
4.1. Data Investigation
4.2. Optimization Results and Analysis
5. Conclusions
- (i)
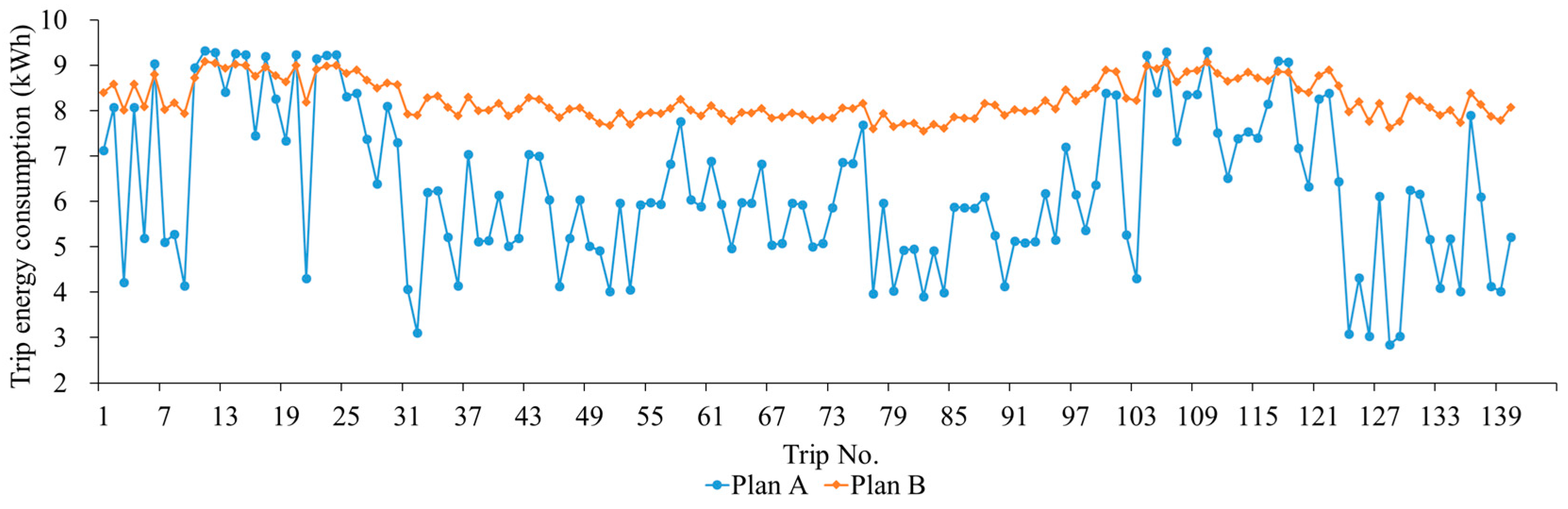
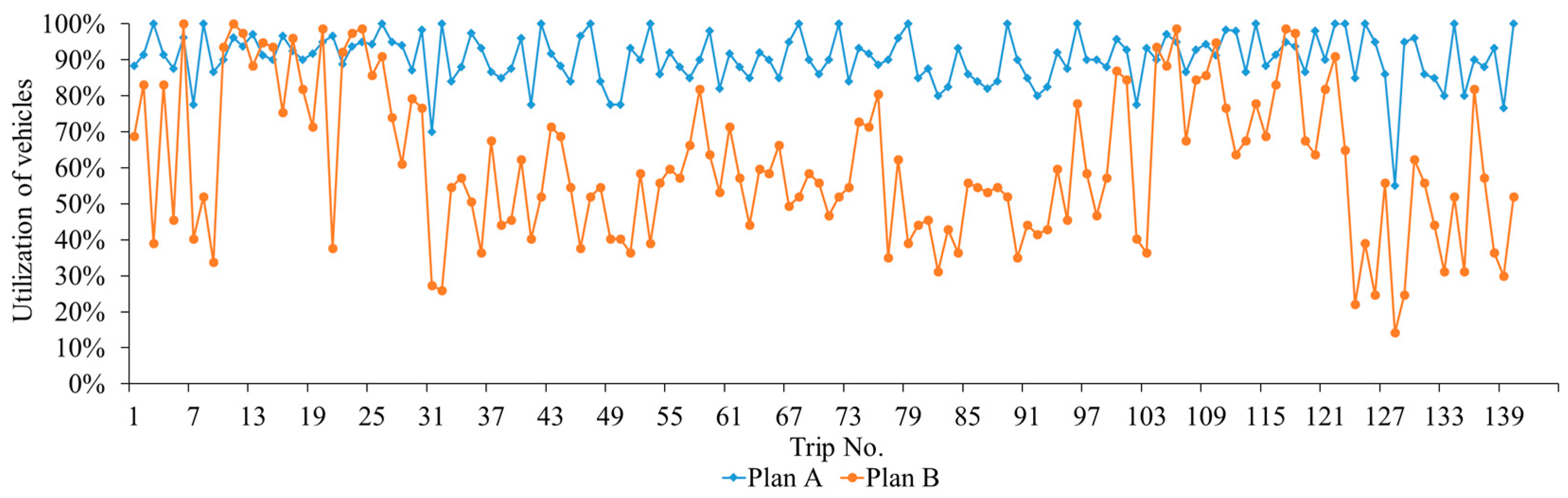
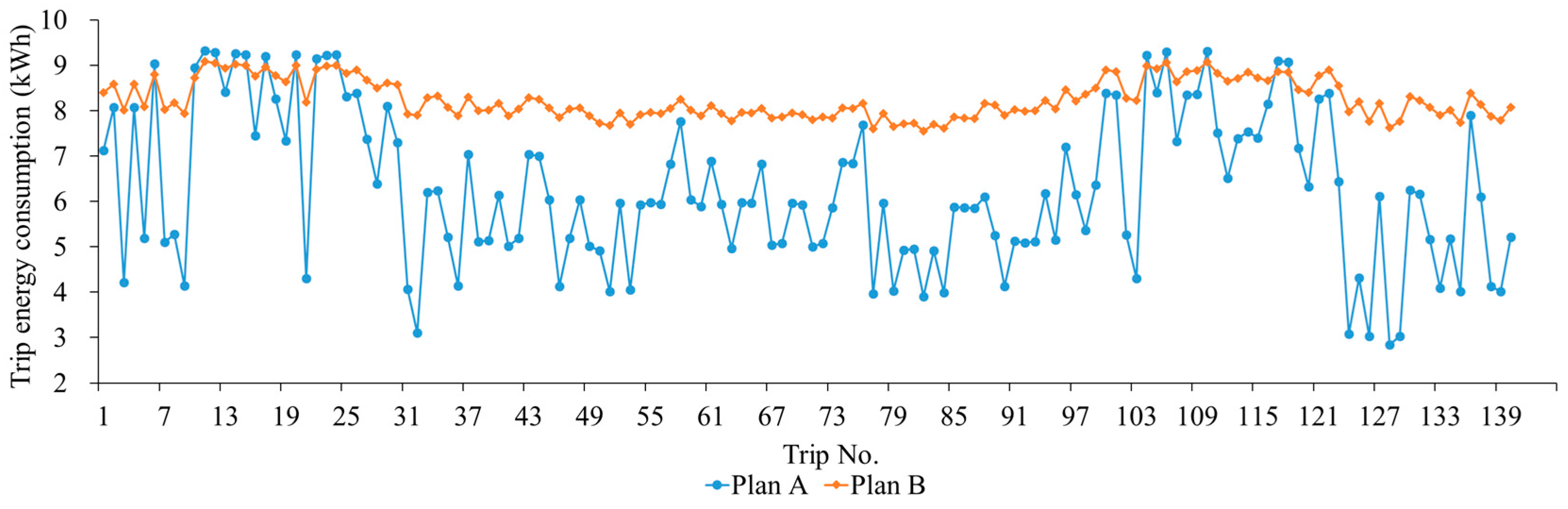
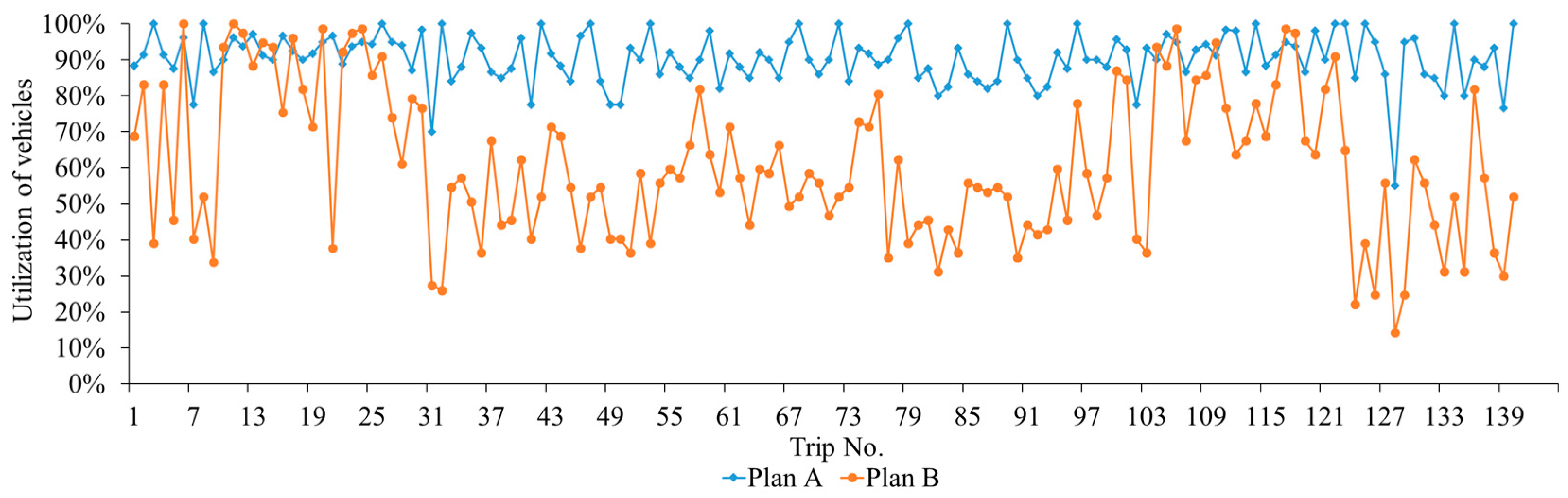
- The collaborative optimization method developed in this paper can flexibly adjust the number of vehicles to perform a trip according to passenger demand, leading to lower vehicle weight during off-peak hours. It realizes decreased trip energy consumption, improved vehicle utilization, and reduced route operating costs.
- (ii)
- Utilizing AMB for bus routes can effectively reduce daily operating costs and operational energy consumption, compared to using conventional EB. The former can be reduced by 5.92%, approximately 301.77 CNY. The latter can be reduced by 23.85%, approximately equal to 275.63 kWh.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trip No. | Maximum Number of Cross-Sectional Passengers (Pax) | Trip No. | Maximum Number of Cross-Sectional Passengers (Pax) | Trip No. | Maximum Number of Cross-Sectional Passengers (Pax) |
|---|---|---|---|---|---|
| 1 | 53 | 48 | 42 | 95 | 35 |
| 2 | 64 | 49 | 31 | 96 | 60 |
| 3 | 30 | 50 | 31 | 97 | 45 |
| 4 | 64 | 51 | 28 | 98 | 36 |
| 5 | 35 | 52 | 45 | 99 | 44 |
| 6 | 77 | 53 | 30 | 100 | 67 |
| 7 | 31 | 54 | 43 | 101 | 65 |
| 8 | 40 | 55 | 46 | 102 | 31 |
| 9 | 26 | 56 | 44 | 103 | 28 |
| 10 | 72 | 57 | 51 | 104 | 72 |
| 11 | 77 | 58 | 63 | 105 | 68 |
| 12 | 75 | 59 | 49 | 106 | 76 |
| 13 | 68 | 60 | 41 | 107 | 52 |
| 14 | 73 | 61 | 55 | 108 | 65 |
| 15 | 72 | 62 | 44 | 109 | 66 |
| 16 | 58 | 62 | 34 | 110 | 73 |
| 17 | 74 | 64 | 46 | 111 | 59 |
| 18 | 63 | 65 | 45 | 112 | 49 |
| 19 | 55 | 66 | 51 | 113 | 52 |
| 20 | 76 | 67 | 38 | 114 | 60 |
| 21 | 29 | 68 | 40 | 115 | 53 |
| 22 | 71 | 69 | 45 | 116 | 64 |
| 23 | 75 | 70 | 43 | 117 | 76 |
| 24 | 76 | 71 | 36 | 118 | 75 |
| 25 | 66 | 72 | 40 | 119 | 52 |
| 26 | 70 | 73 | 42 | 120 | 49 |
| 27 | 57 | 74 | 56 | 121 | 63 |
| 28 | 47 | 75 | 55 | 122 | 70 |
| 29 | 61 | 76 | 62 | 123 | 50 |
| 30 | 59 | 77 | 27 | 124 | 17 |
| 31 | 21 | 78 | 48 | 125 | 30 |
| 32 | 20 | 79 | 30 | 126 | 19 |
| 33 | 42 | 80 | 34 | 127 | 43 |
| 34 | 44 | 81 | 35 | 128 | 11 |
| 35 | 39 | 82 | 24 | 129 | 19 |
| 36 | 28 | 83 | 33 | 130 | 48 |
| 37 | 52 | 84 | 28 | 131 | 43 |
| 38 | 34 | 85 | 43 | 132 | 34 |
| 39 | 35 | 86 | 42 | 133 | 24 |
| 40 | 48 | 87 | 41 | 134 | 40 |
| 41 | 31 | 88 | 42 | 135 | 24 |
| 42 | 40 | 89 | 40 | 136 | 63 |
| 43 | 55 | 90 | 27 | 137 | 44 |
| 44 | 53 | 91 | 34 | 138 | 28 |
| 45 | 42 | 92 | 32 | 139 | 23 |
| 46 | 29 | 93 | 33 | 140 | 40 |
| 47 | 40 | 94 | 46 |
References
- Liu, Y.; Francis, A.; Hollauer, C.; Lawson, M.C.; Shaikh, O.; Cotsman, A.; Bhardwaj, K.; Banboukian, A.; Li, M.; Webb, A.; et al. Reliability of electric vehicle charging infrastructure: A cross-lingual deep learning approach. Commun. Transp. Res. 2023, 3, 100095. [Google Scholar] [CrossRef]
- Ji, J.; Bie, Y.; Shi, H.; Wang, L. Energy-saving speed profile planning for a connected and automated electric bus considering motor characteristic. J. Clean. Prod. 2024, 448, 141721. [Google Scholar] [CrossRef]
- Zhang, Z.; Tafreshian, A.; Masoud, N. Modular transit: Using autonomy and modularity to improve performance in public transportation. Transp. Res. Part E Logist. Transp. Rev. 2020, 141, 102033. [Google Scholar] [CrossRef]
- Khan, Z.S.; He, W.; Menéndez, M. Application of modular vehicle technology to mitigate bus bunching. Transp. Res. Part C Emerg. Technol. 2023, 146, 103953. [Google Scholar] [CrossRef]
- Liu, X.; Qu, X.; Ma, X. Improving flex-route transit services with modular autonomous vehicles. Transp. Res. Part E Logist. Transp. Rev. 2021, 149, 102331. [Google Scholar] [CrossRef]
- Ji, Y.; Liu, B.; Shen, Y.; Du, Y. Scheduling strategy for transit routes with modular autonomous vehicles. Int. J. Transp. Sci. Technol. 2021, 10, 121–135. [Google Scholar] [CrossRef]
- Liu, Z.; de Almeida Correia, G.H.; Ma, Z.; Li, S.; Ma, X. Integrated optimization of timetable, bus formation, and vehicle scheduling in autonomous modular public transport systems. Transp. Res. Part C Emerg. Technol. 2023, 155, 104306. [Google Scholar] [CrossRef]
- He, Y.; Liu, Z.; Song, Z. Joint optimization of electric bus charging infrastructure, vehicle scheduling, and charging management. Transp. Res. Part D Transp. Environ. 2023, 117, 103653. [Google Scholar] [CrossRef]
- He, H.; Sun, F.; Wang, Z.; Lin, C.; Zhang, C.; Xiong, R.; Deng, J.; Zhu, X.; Xie, P.; Zhang, S.; et al. China’s battery electric vehicles lead the world: Achievements in technology system architecture and technological breakthroughs. Green Energy Intell. Transp. 2022, 1, 100020. [Google Scholar] [CrossRef]
- Lin, Y.; Zhang, K.; Shen, Z.J.M.; Ye, B.; Miao, L. Multistage large-scale charging station planning for electric buses considering transportation network and power grid. Transp. Res. Part C Emerg. Technol. 2019, 107, 423–443. [Google Scholar] [CrossRef]
- Cong, Y.; Wang, H.; Bie, Y.; Wu, J. Double-battery configuration method for electric bus operation in cold regions. Transp. Res. Part E Logist. Transp. Rev. 2023, 180, 103362. [Google Scholar] [CrossRef]
- Qu, X.; Wang, S.; Niemeier, D. On the urban-rural bus transit system with passenger-freight mixed flow. Commun. Transp. Res. 2022, 2, 100054. [Google Scholar] [CrossRef]
- Zeng, Z.; Qu, X. What’s next for battery-electric bus charging systems. Commun. Transp. Res. 2023, 3, 100094. [Google Scholar] [CrossRef]
- Perumal, S.S.; Lusby, R.M.; Larsen, J. Electric bus planning & scheduling: A review of related problems and methodologies. Eur. J. Oper. Res. 2022, 301, 395–413. [Google Scholar]
- Chen, G.; Hu, D.; Chien, S.; Guo, L.; Liu, M. Optimizing wireless charging locations for battery electric bus transit with a genetic algorithm. Sustainability 2020, 12, 8971. [Google Scholar] [CrossRef]
- He, J.; Yan, N.; Zhang, J.; Yu, Y.; Wang, T. Battery electric buses charging schedule optimization considering time-of-use electricity price. J. Intell. Connect. Veh. 2022, 5, 138–145. [Google Scholar] [CrossRef]
- Xylia, M.; Leduc, S.; Patrizio, P.; Silveira, S.; Kraxner, F. Developing a dynamic optimization model for electric bus charging infrastructure. Transp. Res. Procedia 2017, 27, 776–783. [Google Scholar] [CrossRef]
- Sang, X.; Yu, X.; Chang, C.T.; Liu, X. Electric bus charging station site selection based on the combined DEMATEL and PROMETHEE-PT framework. Comput. Ind. Eng. 2022, 168, 108116. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Y.; Xu, J.; Barclay, N. Optimal recharging scheduling for urban electric buses: A case study in Davis. Transp. Res. Part E Logist. Transp. Rev. 2017, 100, 115–132. [Google Scholar] [CrossRef]
- Hu, H.; Du, B.; Liu, W.; Perez, P. A joint optimisation model for charger locating and electric bus charging scheduling considering opportunity fast charging and uncertainties. Transp. Res. Part C Emerg. Technol. 2022, 141, 103732. [Google Scholar] [CrossRef]
- Liu, X.; Qu, X.; Ma, X. Optimizing electric bus charging infrastructure considering power matching and seasonality. Transp. Res. Part D Transp. Environ. 2021, 100, 103057. [Google Scholar] [CrossRef]
- McCabe, D.; Ban, X.J. Optimal locations and sizes of layover charging stations for electric buses. Transp. Res. Part C Emerg. Technol. 2023, 152, 104157. [Google Scholar] [CrossRef]
- Uslu, T.; Kaya, O. Location and capacity decisions for electric bus charging stations considering waiting times. Transp. Res. Part D Transp. Environ. 2021, 90, 102645. [Google Scholar] [CrossRef]
- Momenitabar, M.; Ebrahimi, Z.D.; Bengtson, K. Optimal placement of battery electric bus charging stations considering energy storage technology: Queuing modeling approach. Transp. Res. Rec. 2023, 2677, 663–672. [Google Scholar] [CrossRef]
- Das, P.; Kayal, P. An advantageous charging/discharging scheduling of electric vehicles in a PV energy enhanced power distribution grid. Green Energy Intell. Transp. 2024, 3, 100170. [Google Scholar] [CrossRef]
- Guschinsky, N.; Kovalyov, M.Y.; Rozin, B.; Brauner, N. Fleet and charging infrastructure decisions for fast-charging city electric bus service. Comput. Oper. Res. 2021, 135, 105449. [Google Scholar] [CrossRef]
- Ke, B.R.; Chung, C.Y.; Chen, Y.C. Minimizing the costs of constructing an all plug-in electric bus transportation system: A case study in Penghu. Appl. Energy 2016, 177, 649–660. [Google Scholar] [CrossRef]
- Liu, Z.; Song, Z.; He, Y. Planning of fast-charging stations for a battery electric bus system under energy consumption uncertainty. Transp. Res. Rec. 2018, 2672, 96–107. [Google Scholar] [CrossRef]
- He, Y.; Song, Z.; Liu, Z. Fast-charging station deployment for battery electric bus systems considering electricity demand charges. Sustain. Cities Soc. 2019, 48, 101530. [Google Scholar] [CrossRef]
- Alwesabi, Y.; Wang, Y.; Avalos, R.; Liu, Z. Electric bus scheduling under single depot dynamic wireless charging infrastructure planning. Energy 2020, 213, 118855. [Google Scholar] [CrossRef]
- Liu, X.; Liu, X.; Zhang, X.; Zhou, Y.; Chen, J.; Ma, X. Optimal location planning of electric bus charging stations with integrated photovoltaic and energy storage system. Comput. Aided Civ. Infrastruct. Eng. 2022, 38, 1424–1446. [Google Scholar] [CrossRef]
- Gong, M.; Hu, Y.; Chen, Z.; Li, X. Transfer-based customized modular bus system design with passenger-route assignment optimization. Transp. Res. Part E Logist. Transp. Rev. 2021, 153, 102422. [Google Scholar] [CrossRef]
- Dakic, I.; Yang, K.; Menendez, M.; Chow, J.Y. On the design of an optimal flexible bus dispatching system with modular bus units: Using the three-dimensional macroscopic fundamental diagram. Transp. Res. Part B Methodol. 2021, 148, 38–59. [Google Scholar] [CrossRef]
- Wu, J.; Kulcsár, B.; Qu, X. A modular, adaptive, and autonomous transit system (MAATS): An in-motion transfer strategy and performance evaluation in urban grid transit networks. Transp. Res. Part A Policy Pract. 2021, 151, 81–98. [Google Scholar] [CrossRef]
- Li, Q.; Li, X. Trajectory optimization for autonomous modular vehicle or platooned autonomous vehicle split operations. Transp. Res. Part E Logist. Transp. Rev. 2023, 176, 103115. [Google Scholar] [CrossRef]
- Chen, Z.; Li, X.; Zhou, X. Operational design for shuttle systems with modular vehicles under oversaturated traffic: Discrete modeling method. Transp. Res. Part B Methodol. 2019, 122, 1–19. [Google Scholar] [CrossRef]
- Chen, Z.; Li, X.; Zhou, X. Operational design for shuttle systems with modular vehicles under oversaturated traffic: Continuous modeling method. Transp. Res. Part B Methodol. 2020, 132, 76–100. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Pei, M.; Li, X. Variable-capacity operations with modular transits for shared-use corridors. Transp. Res. Rec. 2020, 2674, 230–244. [Google Scholar] [CrossRef]
- Pei, M.; Lin, P.; Du, J.; Li, X.; Chen, Z. Vehicle dispatching in modular transit networks: A mixed-integer nonlinear programming model. Transp. Res. Part E Logist. Transp. Rev. 2021, 147, 102240. [Google Scholar] [CrossRef]
- Tian, Q.; Lin, Y.H.; Wang, D.Z.; Liu, Y. Planning for modular-vehicle transit service system: Model formulation and solution methods. Transp. Res. Part C Emerg. Technol. 2022, 138, 103627. [Google Scholar] [CrossRef]
- Tian, Q.; Lin, Y.H.; Wang, D.Z. Joint scheduling and formation design for modular-vehicle transit service with time-dependent demand. Transp. Res. Part C Emerg. Technol. 2023, 147, 103986. [Google Scholar] [CrossRef]
- Guo, R.; Guan, W.; Vallati, M.; Zhang, W. Modular autonomous electric vehicle scheduling for customized on-demand bus services. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10055–10066. [Google Scholar] [CrossRef]
- Bie, Y.; Cong, Y.; Yang, M.; Wang, L. Coordinated scheduling of electric buses for multiple routes considering stochastic travel times. J. Transp. Eng. Part A Syst. 2023, 149, 04023069. [Google Scholar] [CrossRef]
- Ji, J.; Bie, Y.; Zeng, Z.; Wang, L. Trip energy consumption estimation for electric buses. Commun. Transp. Res. 2022, 2, 100069. [Google Scholar] [CrossRef]
- Li, Z.; Su, S.; Jin, X.; Xia, M.; Chen, Q.; Yamashita, K. Stochastic and distributed optimal energy management of active distribution network with integrated office buildings. CSEE J. Power Energy Syst. 2024, 10, 504–517. [Google Scholar]

| Index | Time Period | Headway (min) | Number of Trips | Travel Time (min) |
|---|---|---|---|---|
| 1 | 5:30–6:30 | 6 | 10 | 53 |
| 2 | 6:30–8:30 | 5 | 24 | 58 |
| 3 | 8:30–10:00 | 6 | 15 | 55 |
| 4 | 10:00–15:00 | 8 | 38 | 53 |
| 5 | 15:00–16:00 | 6 | 10 | 58 |
| 6 | 16:00–17:30 | 5 | 18 | 63 |
| 7 | 17:30–18:30 | 6 | 10 | 58 |
| 8 | 18:30–19:30 | 8 | 8 | 53 |
| 9 | 19:30–20:30 | 10 | 7 | 50 |
| Index | Time Period | Electricity Price (CNY/kWh) |
|---|---|---|
| 1 | 6:00–9:00 | 1.0866 |
| 2 | 9:00–11:30 | 1.3574 |
| 3 | 11:30–15:30 | 1.0866 |
| 4 | 15:30–21:00 | 1.3574 |
| 5 | 21:00–23:00 | 1.0866 |
| 6 | 23:00–6:00 | 0.8158 |
| Index | Time Period | Average Temperature (°C) | Index | Time Period | Average Temperature (°C) |
|---|---|---|---|---|---|
| 1 | 05:00–06:00 | −3 | 9 | 14:00–15:00 | 3 |
| 2 | 06:00–07:00 | −3 | 10 | 15:00–16:00 | 2 |
| 3 | 07:00–08:00 | −2 | 11 | 16:00–17:00 | 1 |
| 4 | 08:00–09:00 | 0 | 12 | 17:00–18:00 | 0 |
| 5 | 09:00–10:00 | 1 | 13 | 18:00–19:00 | −2 |
| 6 | 10:00–11:00 | 2 | 14 | 19:00–20:00 | −3 |
| 7 | 11:00–12:00 | 2 | 15 | 20:00–21:00 | −4 |
| 8 | 13:00–14:00 | 3 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 27.4 CNY | 20% | ||
| 30.98 CNY | 95% | ||
| 0.639 CNY | 10 kWh | ||
| P | 120 kW | 60 kWh | |
| 60 kg |
| Trip No. | AMB No. | Wi (kWh) | Trip No. | AMB No. | Wi (kWh) |
|---|---|---|---|---|---|
| 1 | 1–2–3–4–5–6 | 7.13 | 71 | 96–67–28–36 | 5.01 |
| 2 | 7–8–24–10–11–12–13 | 8.08 | 72 | 21–18–19–20 | 5.08 |
| 3 | 15–14–16 | 4.22 | 73 | 32–33–34–30–31 | 5.86 |
| 4 | 74–18–19–20–21–22–23 | 8.08 | 74 | 17–60–57–58–59–73 | 6.86 |
| 5 | 9–25–26–27 | 5.19 | 75 | 65–66–25–63–64–29 | 6.84 |
| 6 | 28–29–30–31–32–33–34–35 | 9.03 | 76 | 26–43–70–71–83–69–48 | 7.68 |
| 7 | 36–37–38–39 | 5.11 | 77 | 56–61–55 | 3.97 |
| 8 | 40–41–42–43 | 5.28 | 78 | 15–52–53–54–14 | 5.97 |
| 9 | 44–45–46 | 4.14 | 79 | 11–12–9 | 4.03 |
| 10 | 47–48–1–2–3–4–5–6 | 8.95 | 80 | 10–84–40–47 | 4.93 |
| 11 | 49–7–8–9–10–11–12–13 | 9.32 | 81 | 68–37–38–39 | 4.95 |
| 12 | 50–51–52–53–54–14–15–16 | 9.29 | 82 | 3–2–35 | 3.91 |
| 13 | 55–56–57–58–59–60–61 | 8.41 | 83 | 45–46–81–82 | 4.91 |
| 14 | 62–17–18–19–20–21–22–23 | 9.25 | 84 | 79–80–78 | 3.99 |
| 15 | 63–64–65–66–24–25–26–27 | 9.24 | 85 | 76–77–75–16–50 | 5.88 |
| 16 | 29–30–31–32–33–34 | 7.45 | 86 | 90–86–87–88–89 | 5.86 |
| 17 | 35–67–28–36–37–38–39–68 | 9.20 | 87 | 95–91–92–93–94 | 5.85 |
| 18 | 41–40–69–42–43–70–71 | 8.26 | 88 | 42–27–22–23–51 | 6.10 |
| 19 | 72–73–74–75–76–77 | 7.34 | 89 | 85–1–41–72 | 5.25 |
| 20 | 78–79–80–81–82–44–45–46 | 9.23 | 90 | 22–62–17 | 4.13 |
| 21 | 4–5–6 | 4.30 | 91 | 20–21–18–19 | 5.13 |
| 22 | 48–83–84–47–85–1–2–3 | 9.15 | 92 | 39–68–37–38 | 5.09 |
| 23 | 13–49–7–8–9–10–11–12 | 9.22 | 93 | 65–29–44–64 | 5.11 |
| 24 | 16–50–51–52–53–54–14–15 | 9.23 | 94 | 5–49–7–6–4 | 6.17 |
| 25 | 61–55–56–57–58–59–60 | 8.31 | 95 | 31–66–25–63 | 5.15 |
| 26 | 22–62–17–18–19–20–21 | 8.38 | 96 | 58–59–73–74–60–57 | 7.20 |
| 27 | 25–63–64–65–66–24 | 7.38 | 97 | 53–54–14–15–52 | 6.16 |
| 28 | 30–31–32–33–34 | 6.39 | 98 | 64–29–26–63 | 5.37 |
| 29 | 67–28–36–37–38–39–68 | 8.10 | 99 | 69–48–3–2–35 | 6.37 |
| 30 | 71–83–69–42–43–70 | 7.30 | 100 | 82–45–46–81–11–12–9 | 8.38 |
| 31 | 75–76–77 | 4.07 | 101 | 89–90–86–41–72–65–30 | 8.34 |
| 32 | 74–73 | 3.10 | 102 | 10–84–40–47 | 5.27 |
| 33 | 81–82–44–45–46 | 6.20 | 103 | 32–33–34 | 4.31 |
| 34 | 40–84–47–85–1 | 6.23 | 104 | 94–95–91–85–1–56–61–55 | 9.22 |
| 35 | 9–10–11–12 | 5.21 | 105 | 19–20–21–18–79–80–78 | 8.40 |
| 36 | 80–78–79 | 4.14 | 106 | 23–25–27–22–51–22–62–17 | 9.29 |
| 37 | 51–52–53–54–14–15 | 7.04 | 107 | 38–39–68–37–56–61 | 7.33 |
| 38 | 22–23–25–27 | 5.12 | 108 | 97–96–67–28–36–55–8 | 8.34 |
| 39 | 57–58–59–60 | 5.13 | 109 | 98–42–43–70–71–83–76 | 8.36 |
| 40 | 34–30–31–32–33 | 6.14 | 110 | 59–45–74–60–57–58–77–50 | 9.31 |
| 41 | 18–19–20–21 | 5.02 | 111 | 54–46–15–52–53–16 | 7.52 |
| 42 | 37–38–39–68 | 5.19 | 112 | 4–5–49–7–6 | 6.51 |
| 43 | 70–71–83–69–42–43 | 7.04 | 113 | 87–31–66–26–63–81 | 7.39 |
| 44 | 66–25–63–64–65–29 | 7.00 | 114 | 88–69–48–3–2–35 | 7.53 |
| 45 | 46–81–82–44–45 | 6.03 | 115 | 92–64–29–10–63–82 | 7.40 |
| 46 | 6–4–5 | 4.12 | 116 | 93–45–46–81–11–12–33 | 8.15 |
| 47 | 8–13–49–7 | 5.19 | 117 | 73–89–90–86–41–72–65–30 | 9.09 |
| 48 | 2–3–35–41–72 | 6.03 | 118 | 14–19–20–21–18–79–80–78 | 9.08 |
| 49 | 96–67–28–36 | 5.02 | 119 | 75–11–12–9–32–84 | 7.17 |
| 50 | 12–9–10–11 | 4.92 | 120 | 44–40–47–61–55 | 6.33 |
| 51 | 17–61–55 | 4.02 | 121 | 24–94–95–91–85–1–56 | 8.26 |
| 52 | 33–34–30–31–32 | 5.96 | 122 | 83–34–42–43–70–71–23 | 8.38 |
| 53 | 37–38–39 | 4.06 | 123 | 85–27–22–51–22 | 6.44 |
| 54 | 52–53–54–14–15 | 5.93 | 124 | 54–62 | 3.08 |
| 55 | 84–40–47–85–1 | 5.98 | 125 | 88–68–37 | 4.32 |
| 56 | 27–22–23–26–51 | 5.94 | 126 | 38–56 | 3.03 |
| 57 | 60–57–58–59–73–74 | 6.82 | 127 | 76–97–96–67–28 | 6.11 |
| 58 | 43–70–71–83–69–42–48 | 7.76 | 128 | 98–36 | 2.85 |
| 59 | 45–46–81–82–44 | 6.03 | 129 | 92–61 | 3.03 |
| 60 | 77–75–76–16–50 | 5.89 | 130 | 64–36–55–8–61 | 6.25 |
| 61 | 64–66–25–63–65–29 | 6.89 | 131 | 18–4–5–49–7 | 6.16 |
| 62 | 56–2–35–41–72 | 5.94 | 132 | 69–6–46–15 | 5.17 |
| 62 | 21–18–19–20 | 4.97 | 133 | 77–57–58 | 4.10 |
| 64 | 86–87–88–89–90 | 5.98 | 134 | 95–52–53–16 | 5.17 |
| 65 | 91–92–93–94–95 | 5.96 | 135 | 25–46–81 | 4.01 |
| 66 | 79–80–78–22–62–17 | 6.82 | 136 | 3–29–10–63–82–45–11 | 7.90 |
| 67 | 68–37–38–39 | 5.05 | 137 | 90–86–41–72–65 | 6.10 |
| 68 | 11–12–9–10 | 5.08 | 138 | 39–21–79 | 4.12 |
| 69 | 6–4–5–49–7 | 5.96 | 139 | 65–44–40 | 4.02 |
| 70 | 56–61–55–8–13 | 5.93 | 140 | 20–88–68–37 | 5.21 |
| Plan | Plan A | Plan B |
|---|---|---|
| U | 98 | 13 |
| B (kWh) | 16 | 120 |
| R | 1 | 2 |
| Z (CNY) | 4794.302 | 5096.07 |
| Z1 (CNY) | 27.4 | 54.8 |
| Z2 (CNY) | 3036.04 | 3101.54 |
| Z3 (CNY) | 1001.952 | 996.84 |
| Z4 (CNY) | 728.91 | 942.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, A.; Cong, Y.; Wang, C.; Bie, Y. Optimal Vehicle Scheduling and Charging Infrastructure Planning for Autonomous Modular Transit System. Sustainability 2024, 16, 3316. https://doi.org/10.3390/su16083316
Chang A, Cong Y, Wang C, Bie Y. Optimal Vehicle Scheduling and Charging Infrastructure Planning for Autonomous Modular Transit System. Sustainability. 2024; 16(8):3316. https://doi.org/10.3390/su16083316
Chicago/Turabian StyleChang, Ande, Yuan Cong, Chunguang Wang, and Yiming Bie. 2024. "Optimal Vehicle Scheduling and Charging Infrastructure Planning for Autonomous Modular Transit System" Sustainability 16, no. 8: 3316. https://doi.org/10.3390/su16083316
APA StyleChang, A., Cong, Y., Wang, C., & Bie, Y. (2024). Optimal Vehicle Scheduling and Charging Infrastructure Planning for Autonomous Modular Transit System. Sustainability, 16(8), 3316. https://doi.org/10.3390/su16083316