remotIO: A Sentinel-1 Multi-Temporal InSAR Infrastructure Monitoring Service with Automatic Updates and Data Mining Capabilities

 , ,
, ,  , and
, and
Abstract
:
1. Introduction
- They are based on the assessment of a single variable, e.g., velocity.
- They rely only on displacement time series analysis, producing less reliable outputs for smaller or non-equally sampled datasets, while ignoring underlying spatial relations.
- They lack robustness for performing analysis solely on a set of highly coherent points.
- They require manual handling of the data in different software or Geographic Information Systems (GIS).
- They incorporate distortion to the spatial composition of point networks by involving interpolation or gridding.
- Their application is limited to a one-off activity and utilization of a single technique (e.g., clustering only).
- They do not support the analysis of more complex deformation scenarios over low-coherent areas.
2. Study Area and Data
- Landslides (Upper Nitra; Hradec, Velka and Mala Lehotka municipalities): The region of Upper Nitra (Prievidza) in Central Slovakia is affected by numerous slope failures and landslides. As a result of complex geological setting, the landslide susceptibility of the area is above 60%. Landslides represent direct threat to residents’ properties and health. After reactivation in 2013 and serious damage to the infrastructure, locations of active landslides are being monitored by State geological institute of Dionýz Štúr (SGUDS).
- Mining subsidence (Upper Nitra; Kos village): Another geohazard posing a threat to properties of citizens in Upper Nitra region, Slovakia, is a ground subsidence due to undermining which has led to the abandonment of Kos village. Continually subsiding areas over the undermined fields are changing dynamically over time and consequences of undermining are strongly evident morphologically, via damage to buildings and infrastructure and by formation of sinkholes. Knowledge of surface movements within these areas is especially important because there are still inhabited houses, also monitored by leveling network.
- Dams, (Gabcikovo Waterworks): Gabcikovo waterworks, originally designed and built as part of Gabcikovo-Nagymaros framework waterworks are built on the Danube River nearby Bratislava, the capital of Slovakia. The main purpose of waterworks is to protect against floods, frequently present on the Danube historically as well as recently. Waterworks consist of two main levels: Cunovo dam and Gabcikovo dam. Both dams are predominantly concrete with some embarked parts.
3. Methods
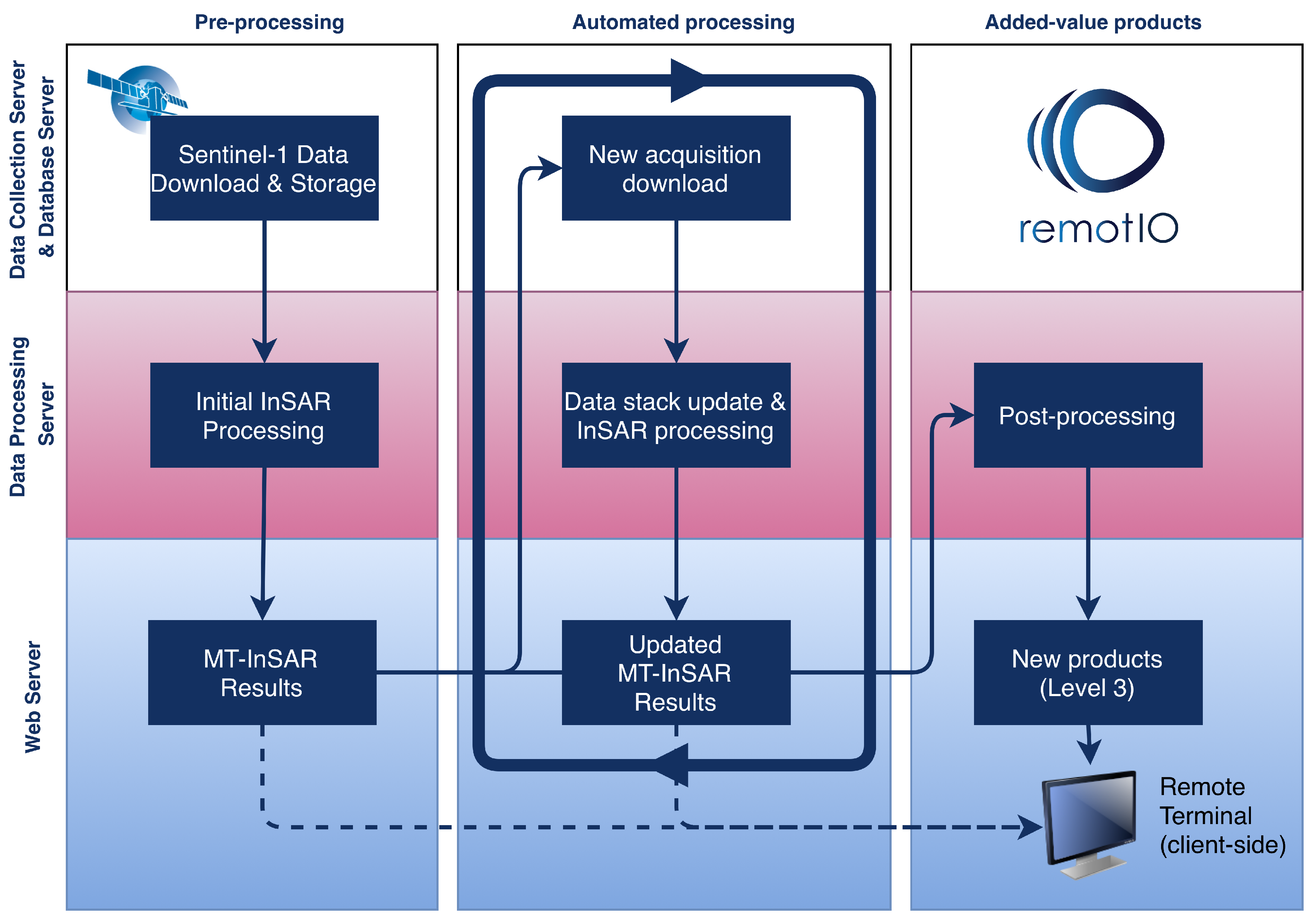
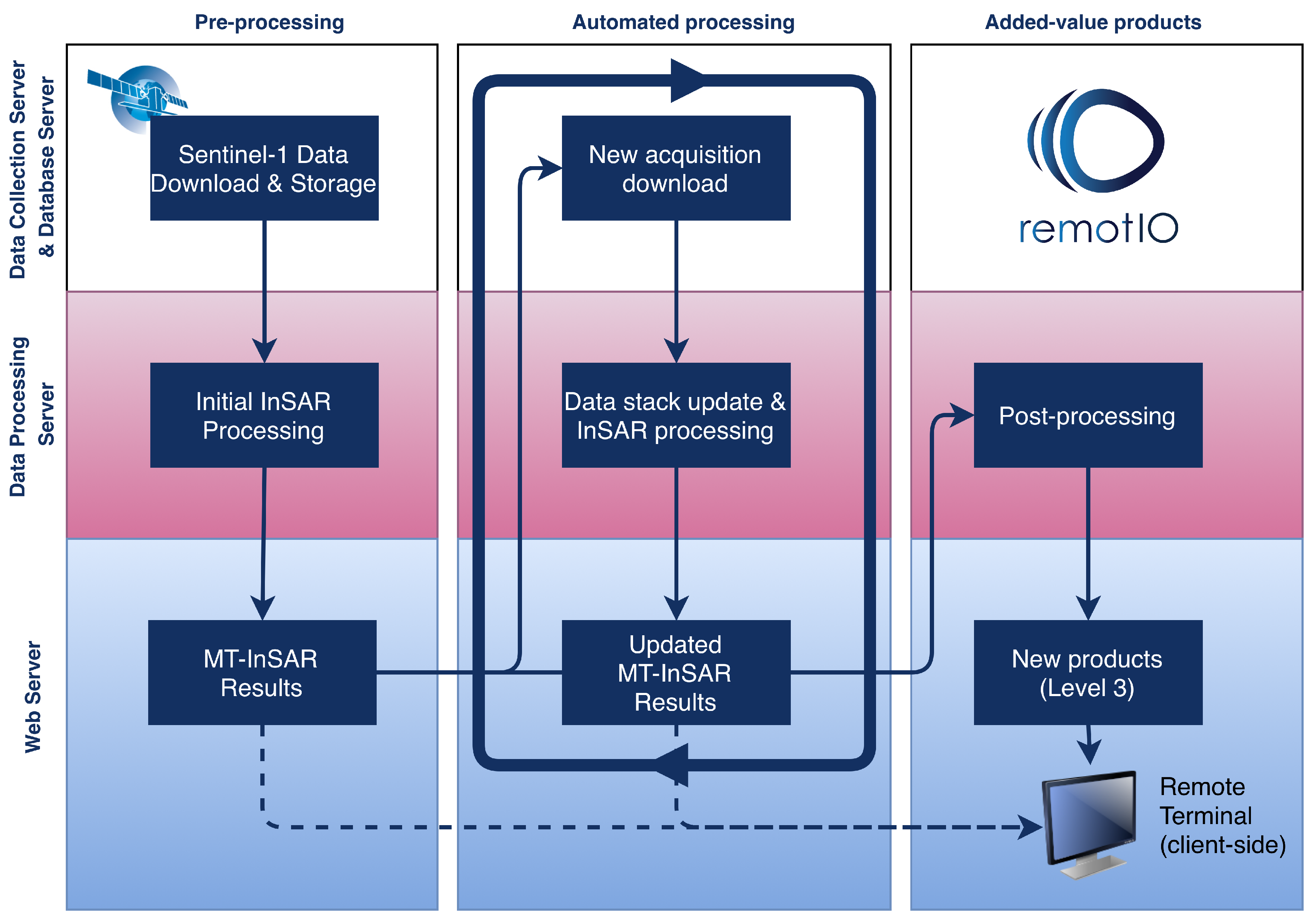
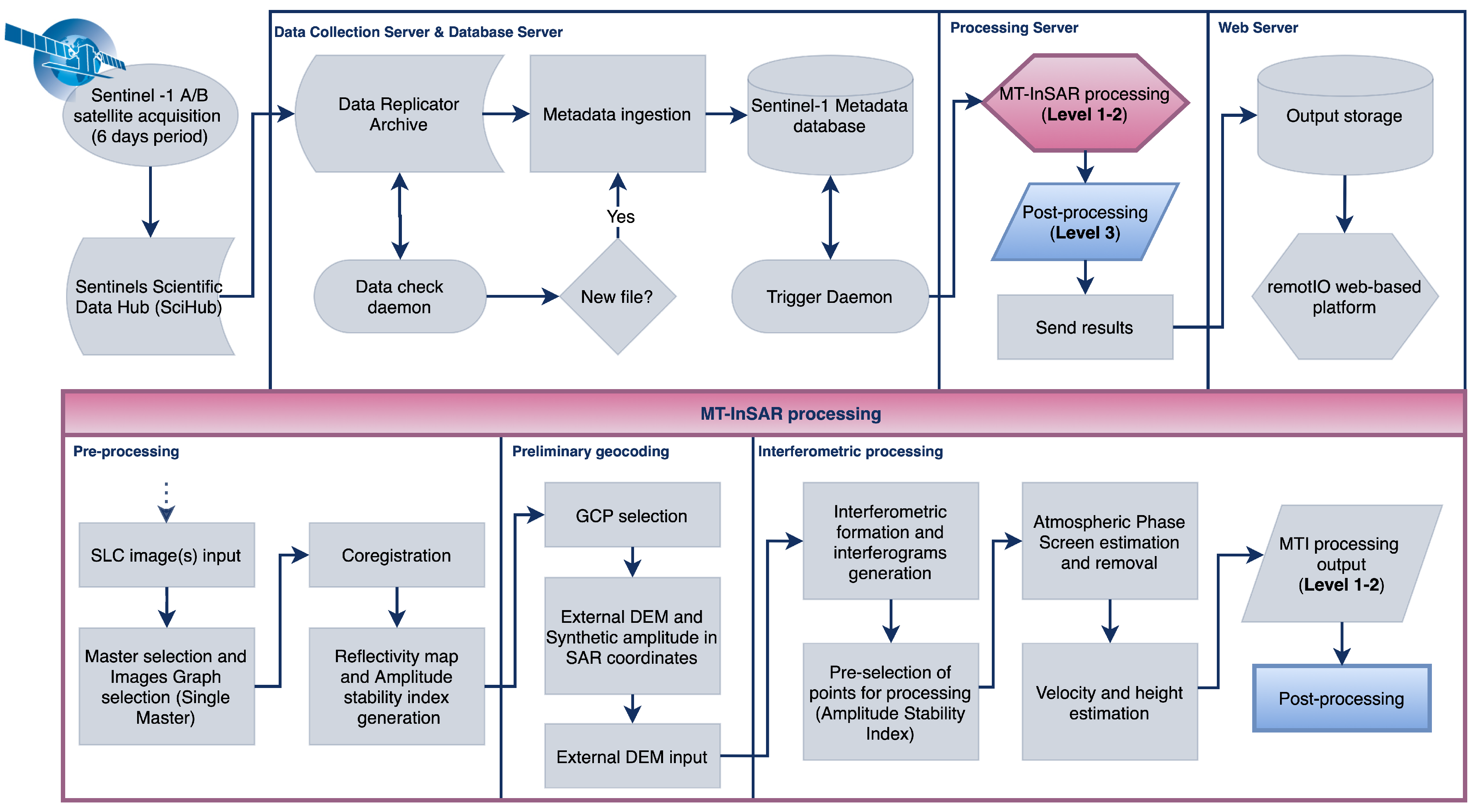
3.1. General Platform Design
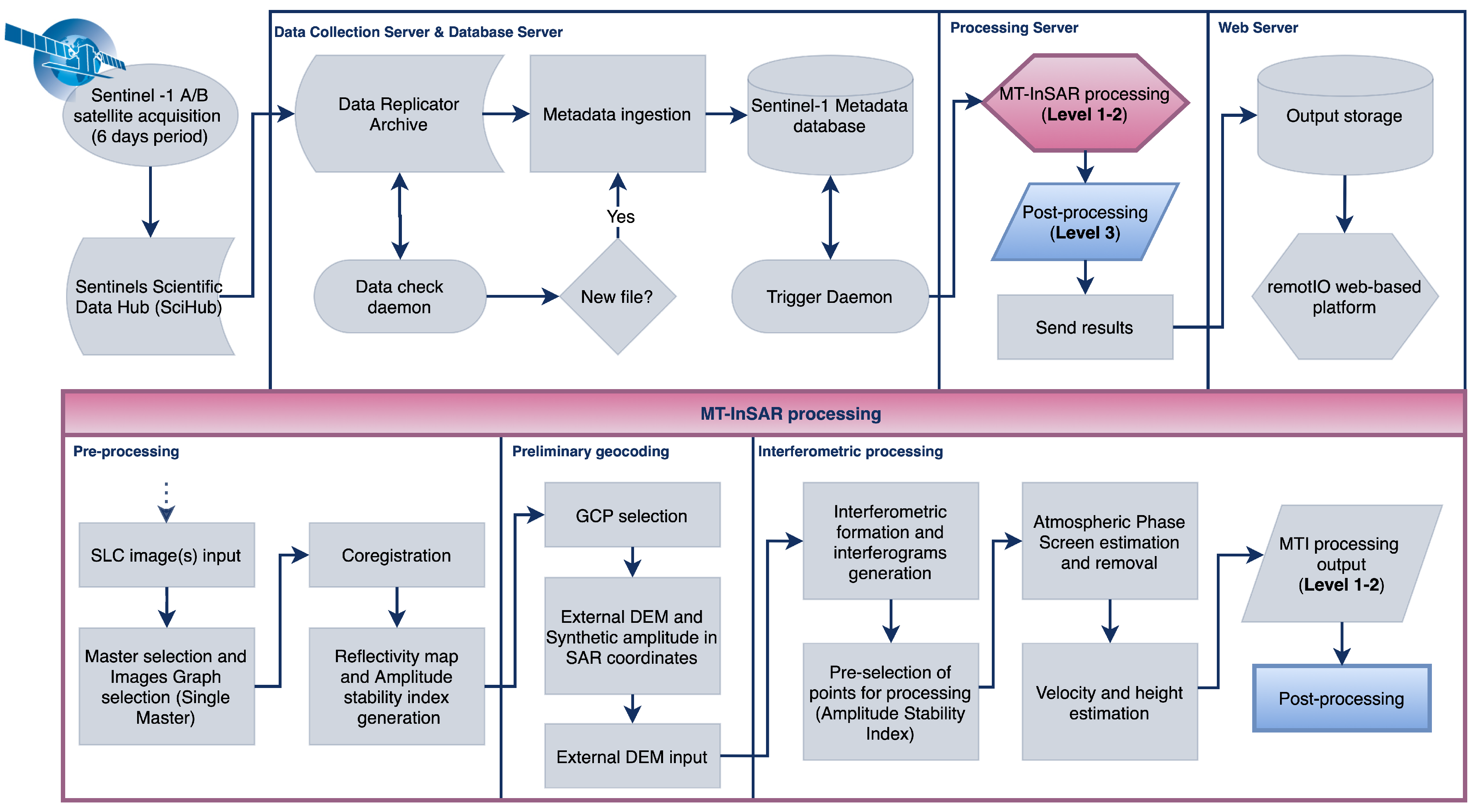
3.2. Pre-Processing
3.3. Automated Processing
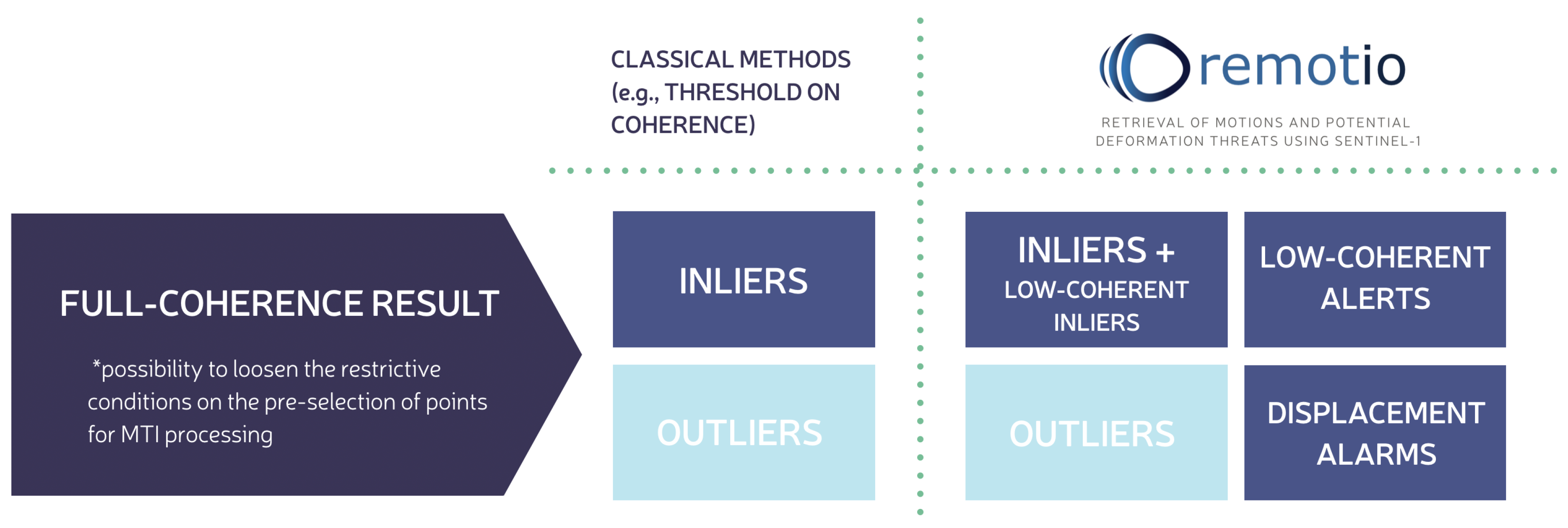
4. Post-Processing
4.1. Data Mining Methodology
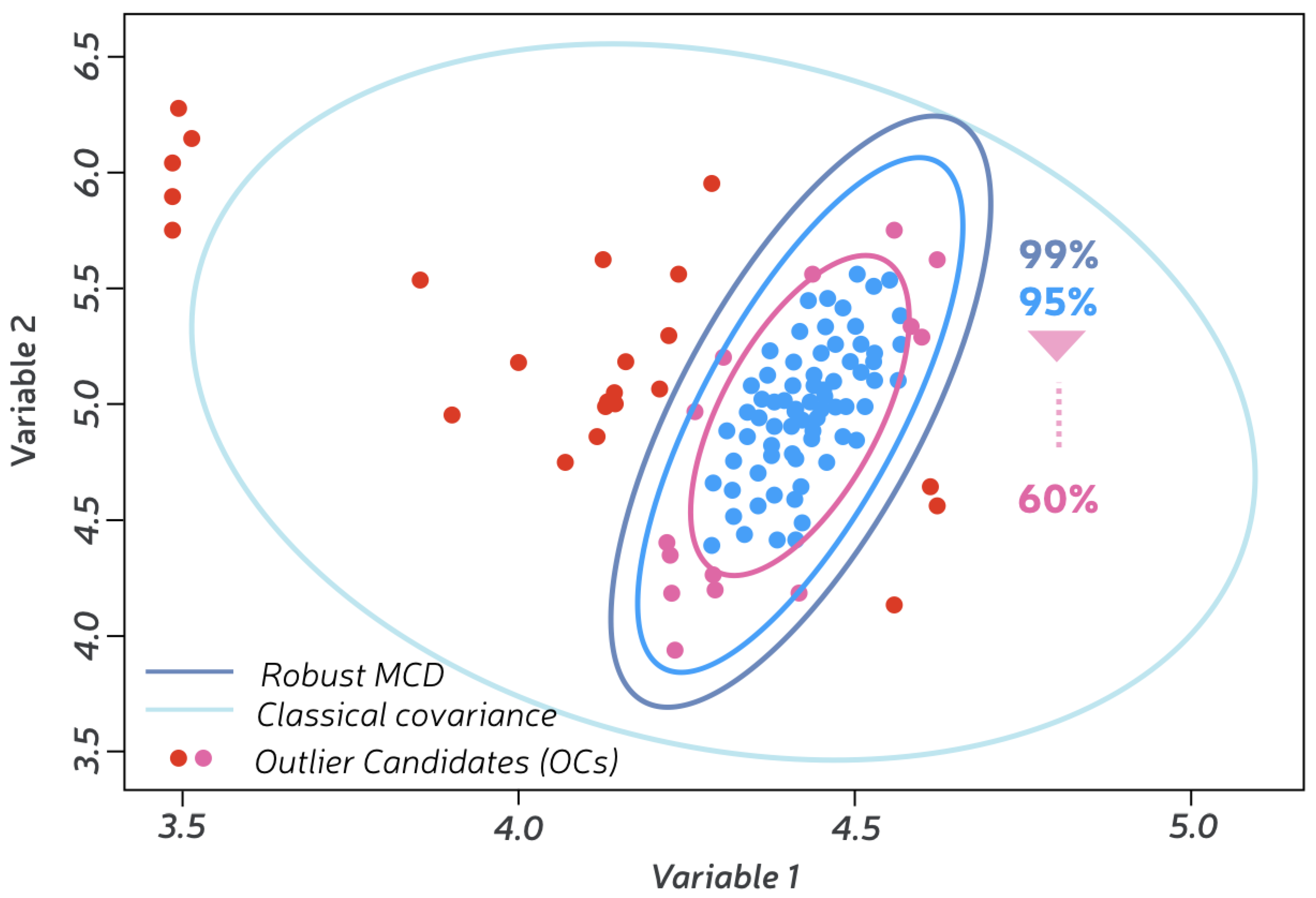
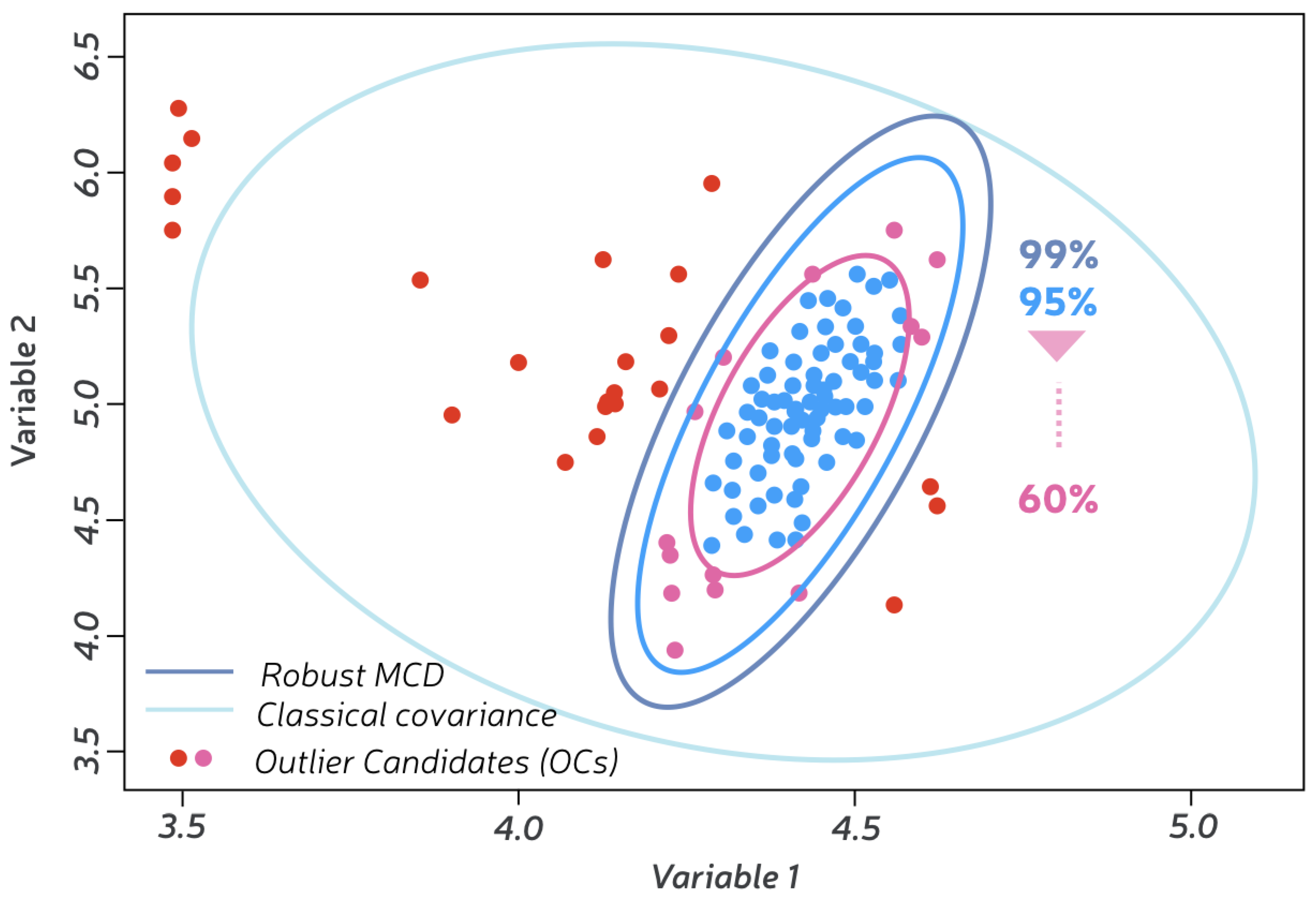
4.1.1. Step 1: Outlier Candidates (OCs) Detection
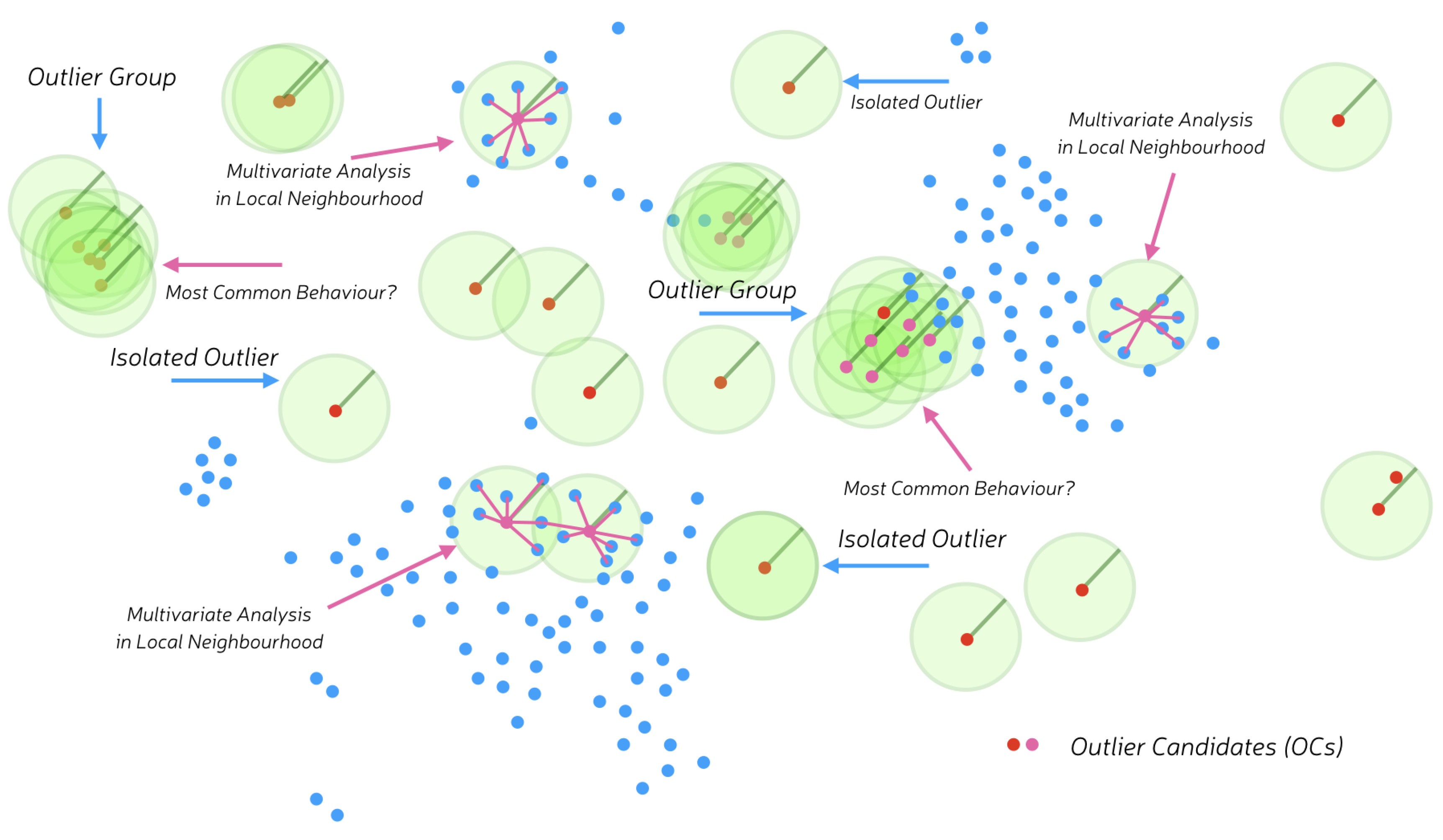
4.1.2. Step 2: All Nearest Neighbors Search
4.1.3. Step 3: Multivariate Analysis in Local Neighborhood
4.1.4. Step 4: Decision Making Process
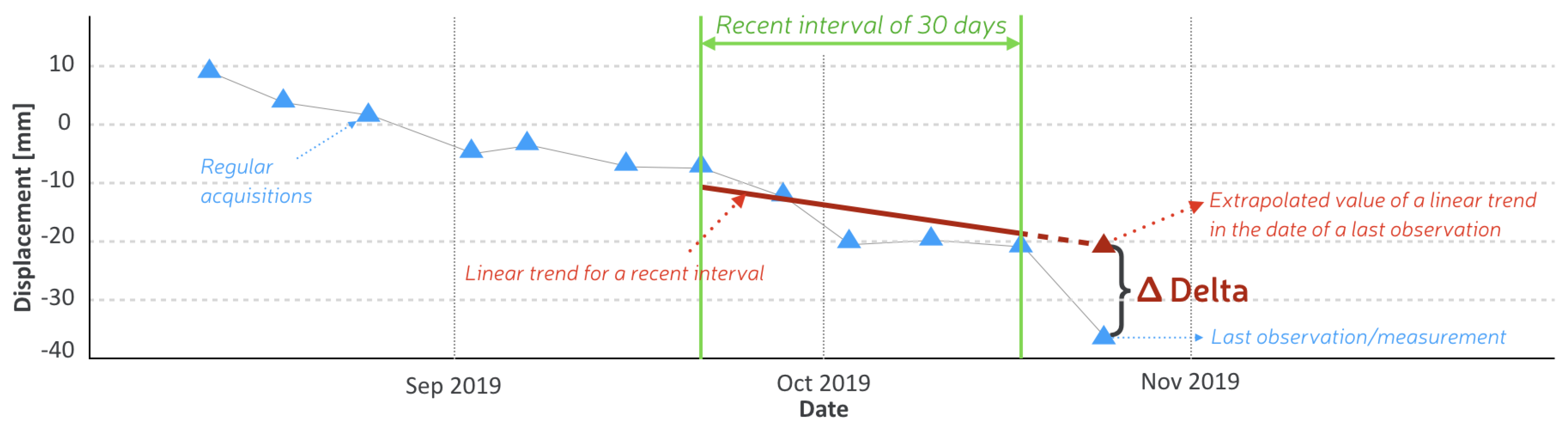
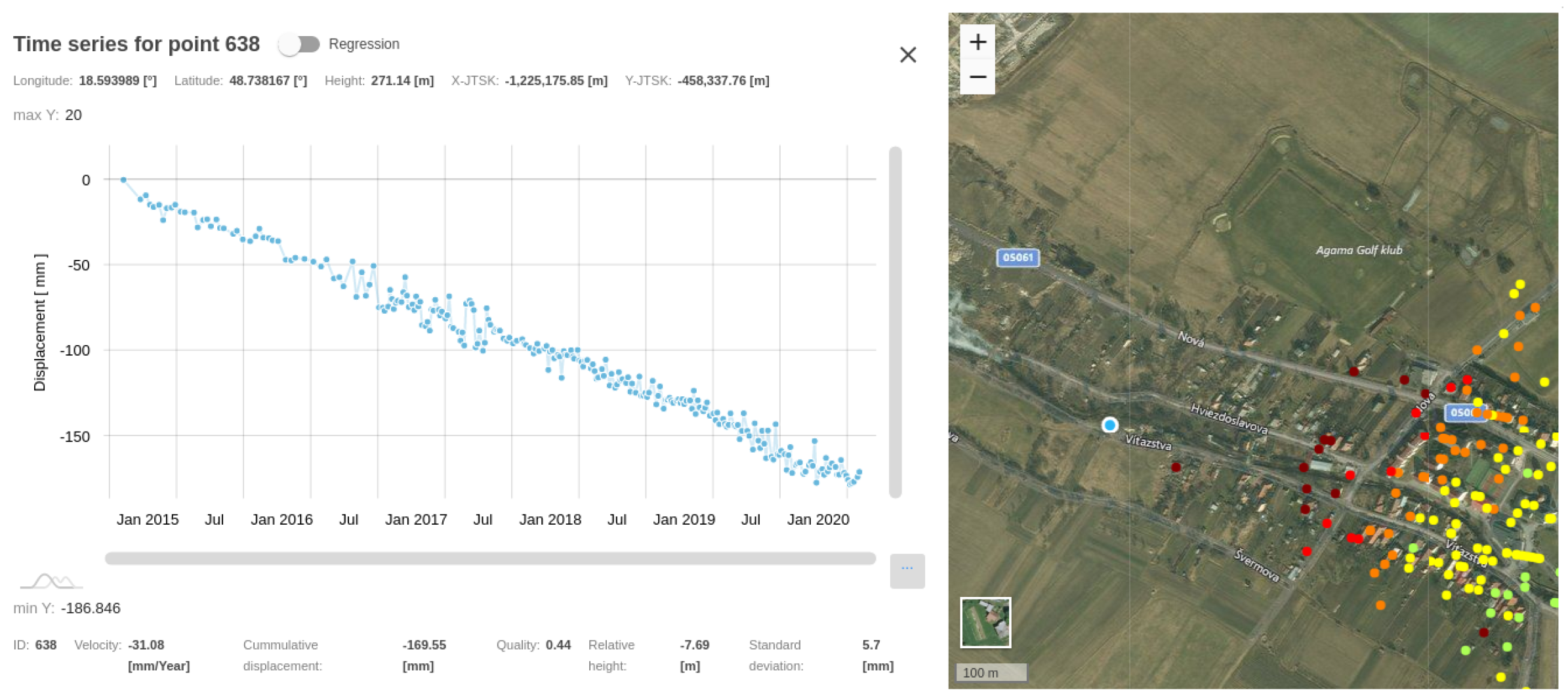
4.1.5. Step 5: Time Series Warning
- estimation of the linear trend for observations acquired within an interval of last 30 days;
- prediction (extrapolation) in the date of last observation; and
- comparison of actual measurement with the expected value from the linear trend.
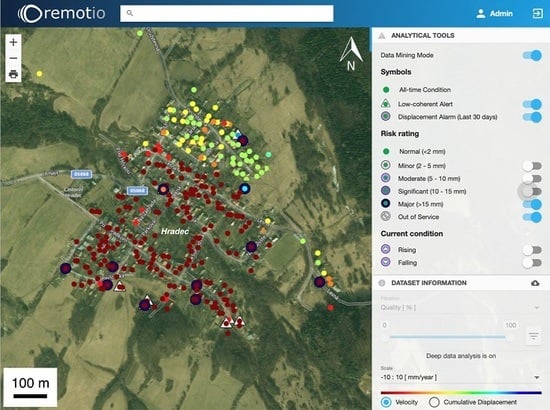
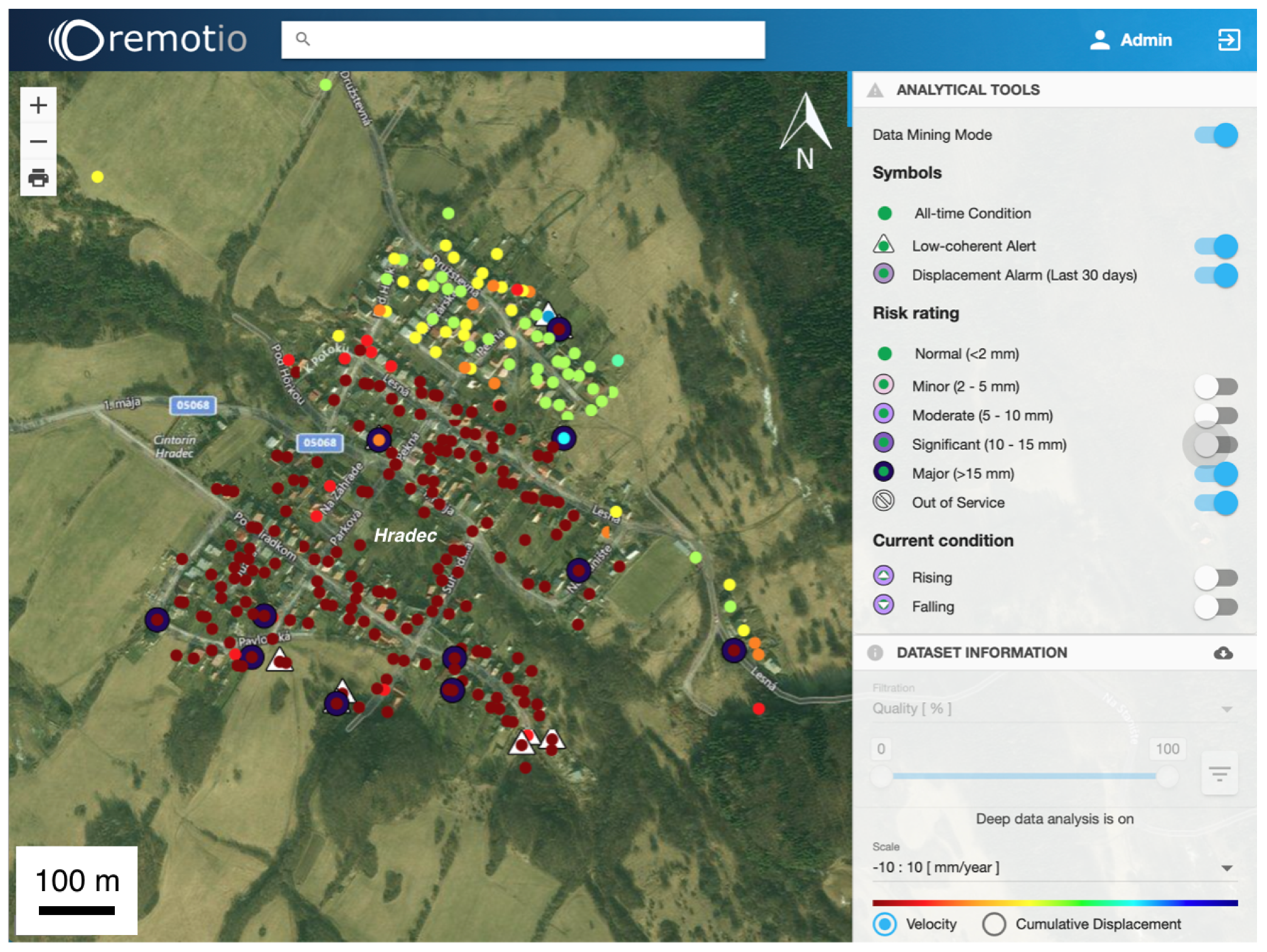
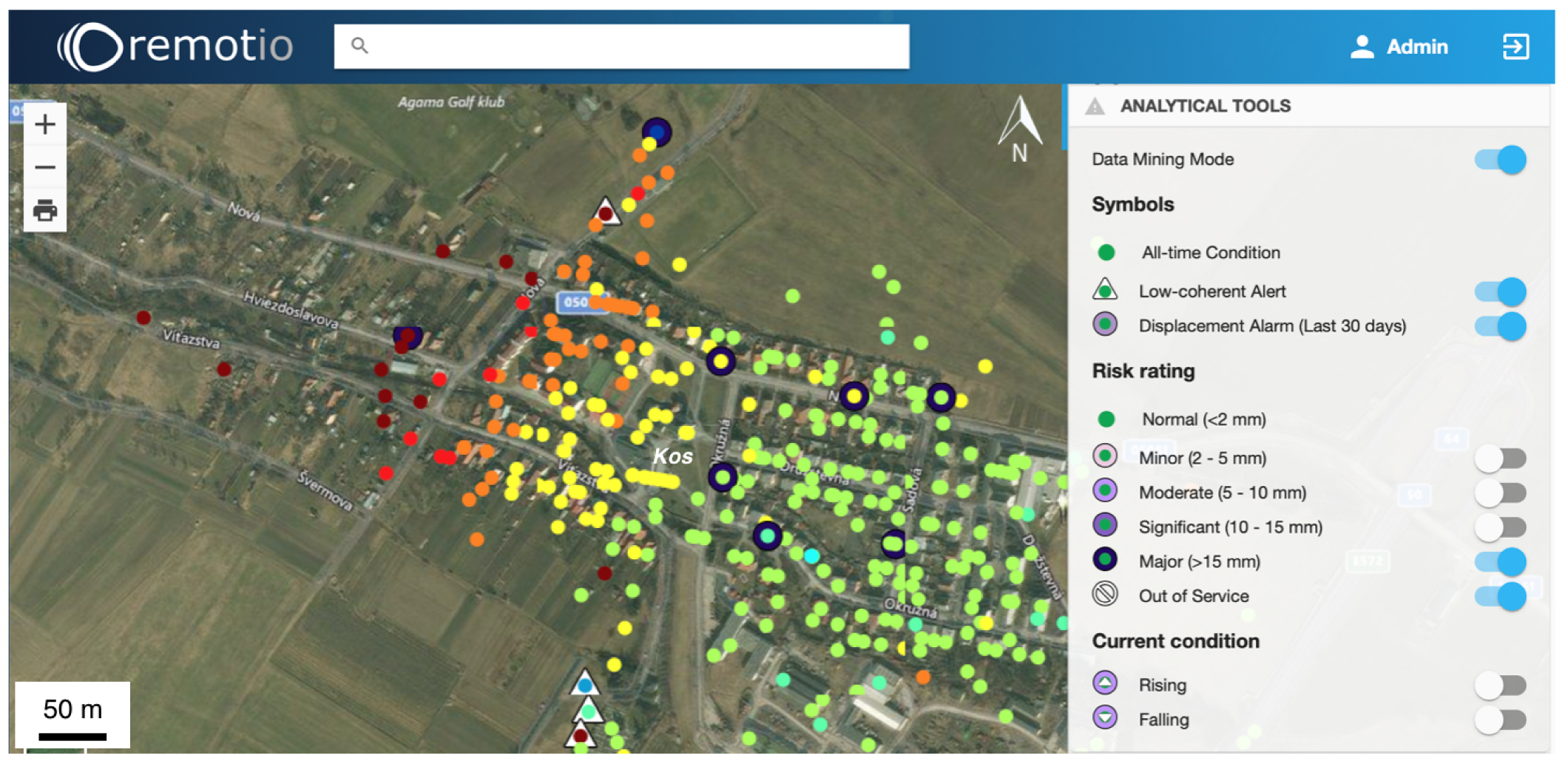
- ’Displacement Alarms’ with pre-assigned levels of ’Risk Ratings’ with intervals defining the amount of deviation ((1) Normal; (2) Minor; (3) Moderate; (4) Significant; and (5) Major) of the last observation in comparison to velocity recorded for previous 30 days.
- Symbols (▲/▼) expressing ’Current Condition’ of the observed point (Rising/Falling) in accordance with the sign (+/−) of the ’Delta’ value.
4.1.6. Comparison with Previous Version
4.2. Added-Value Products
5. Results
5.1. Landslides (Upper Nitra; Hradec, Velka and Mala Lehotka)
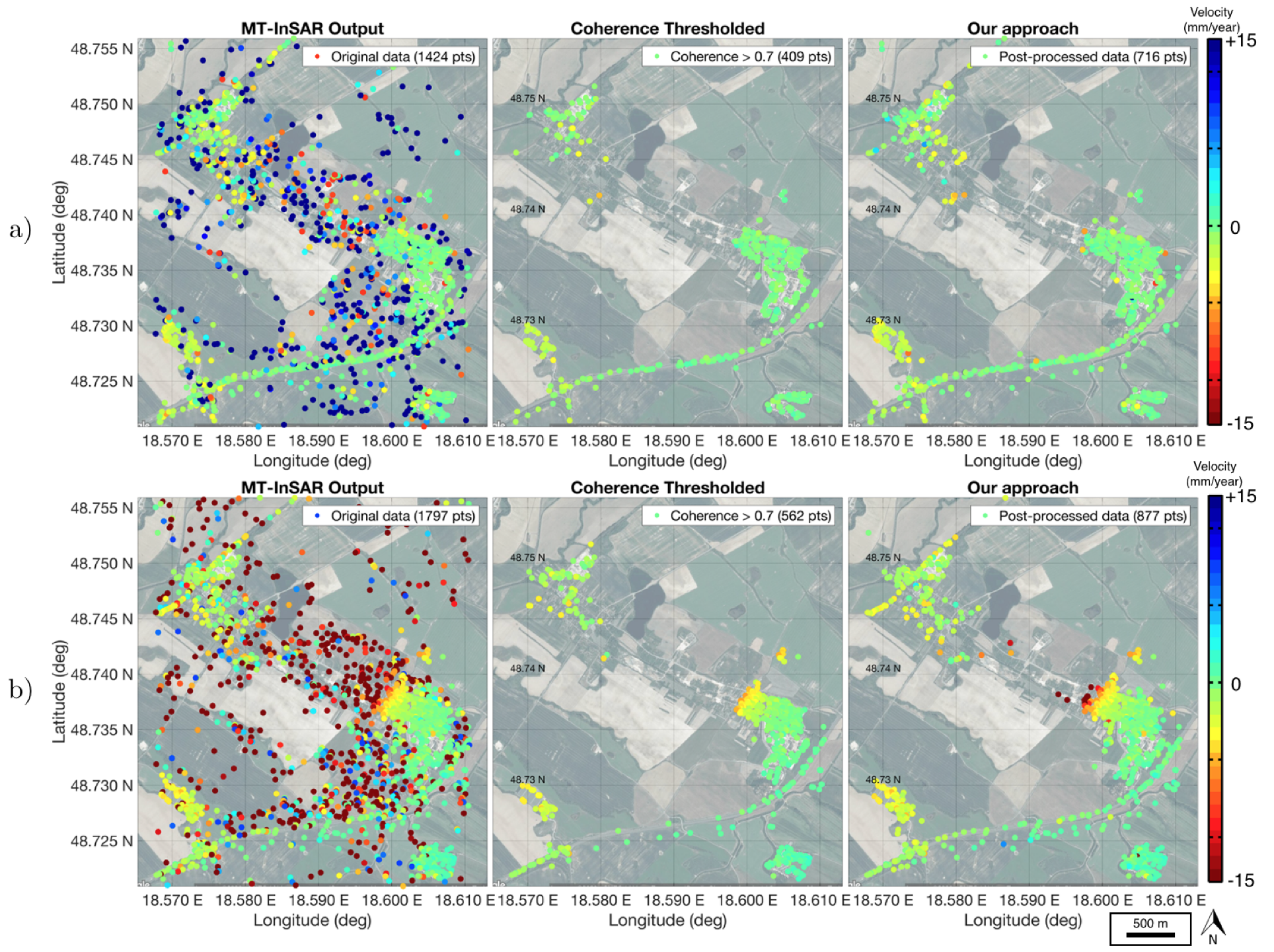
5.2. Mining Subsidence (Upper Nitra, Kos Village)
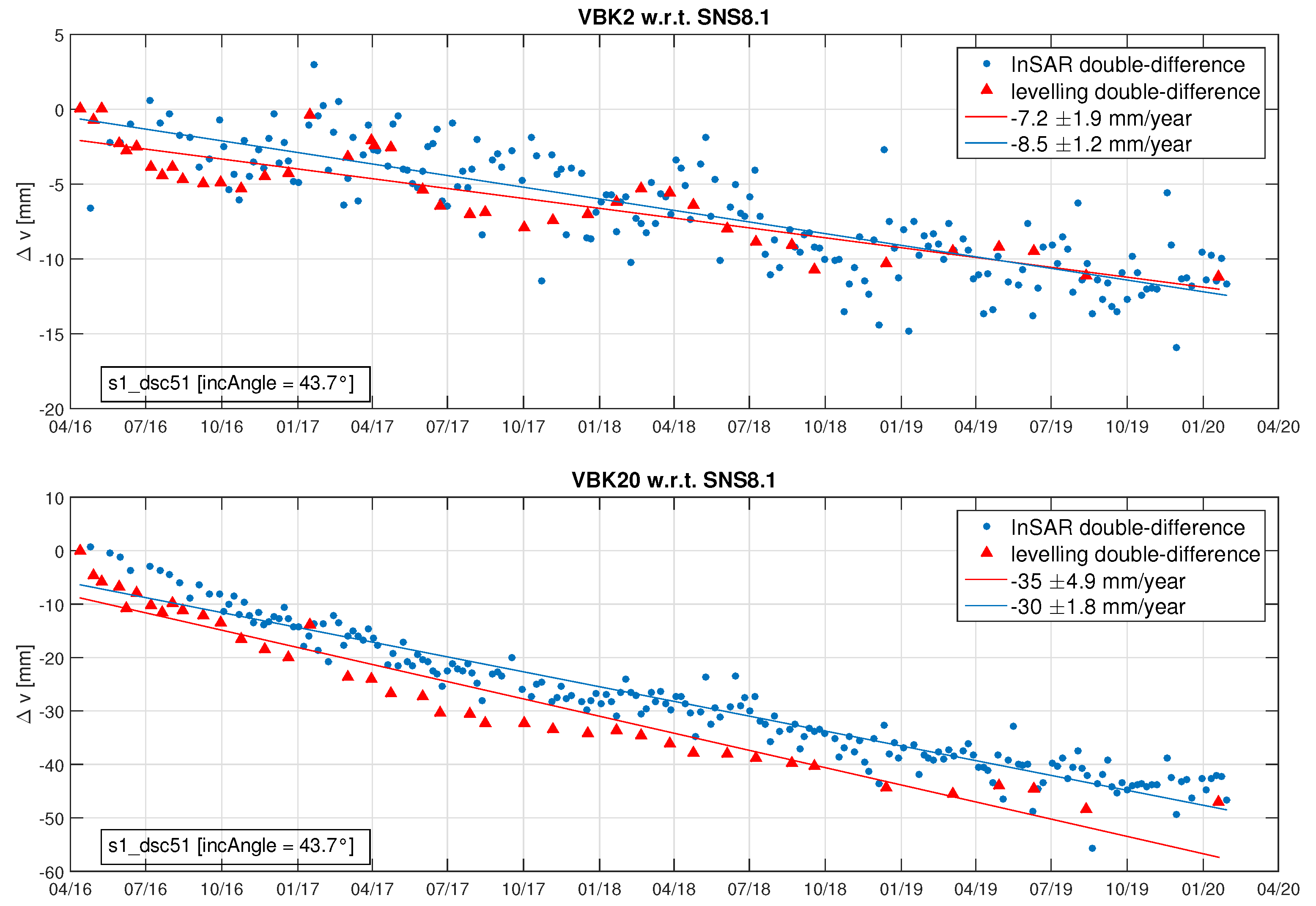
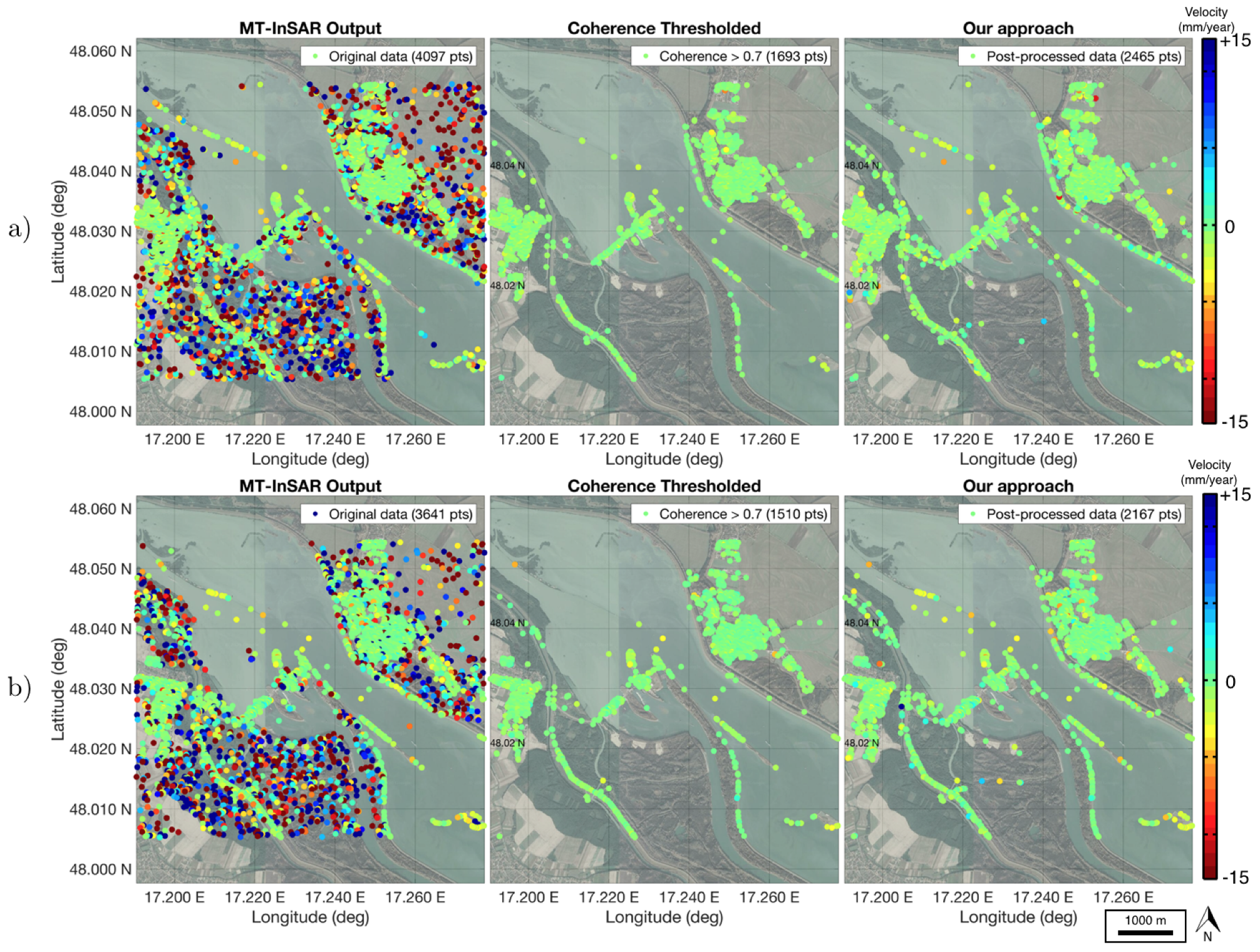
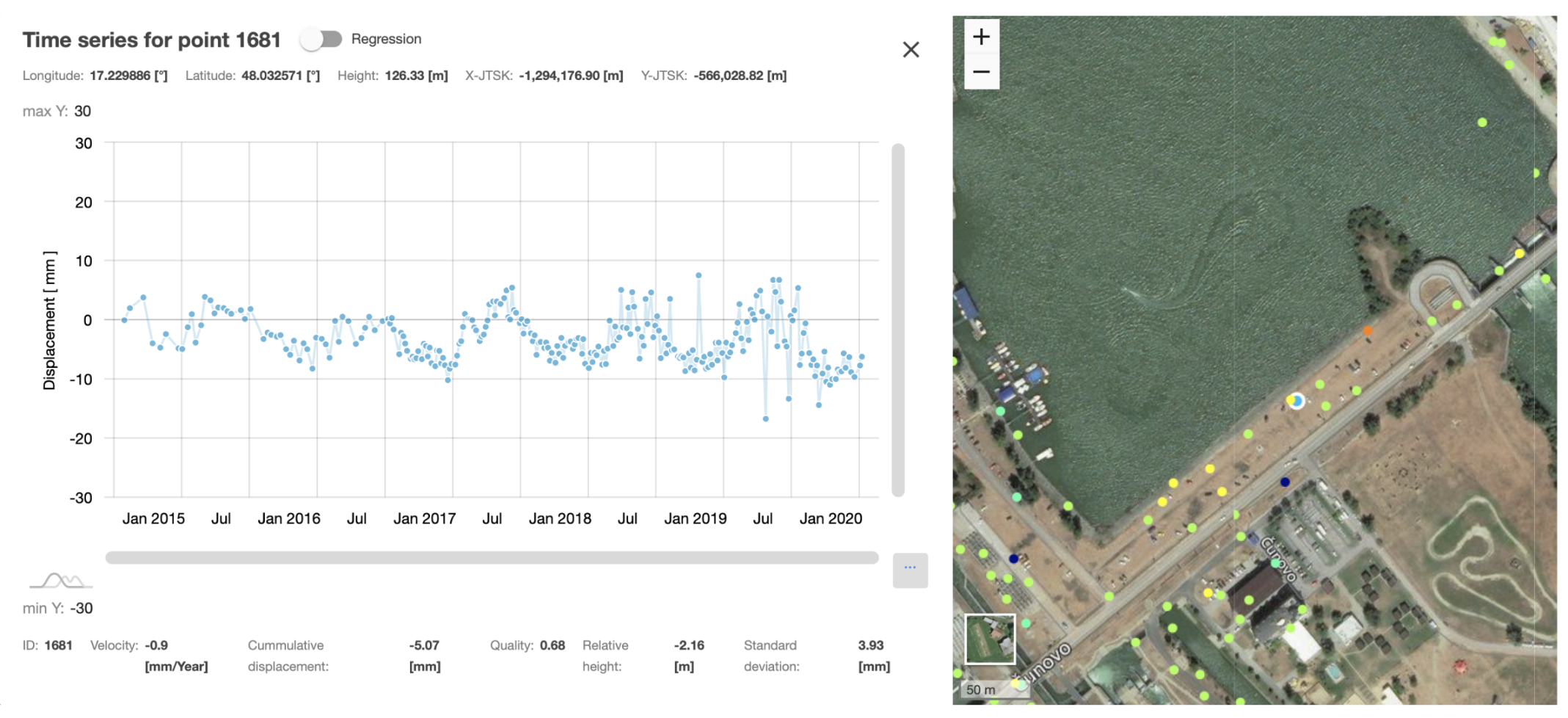
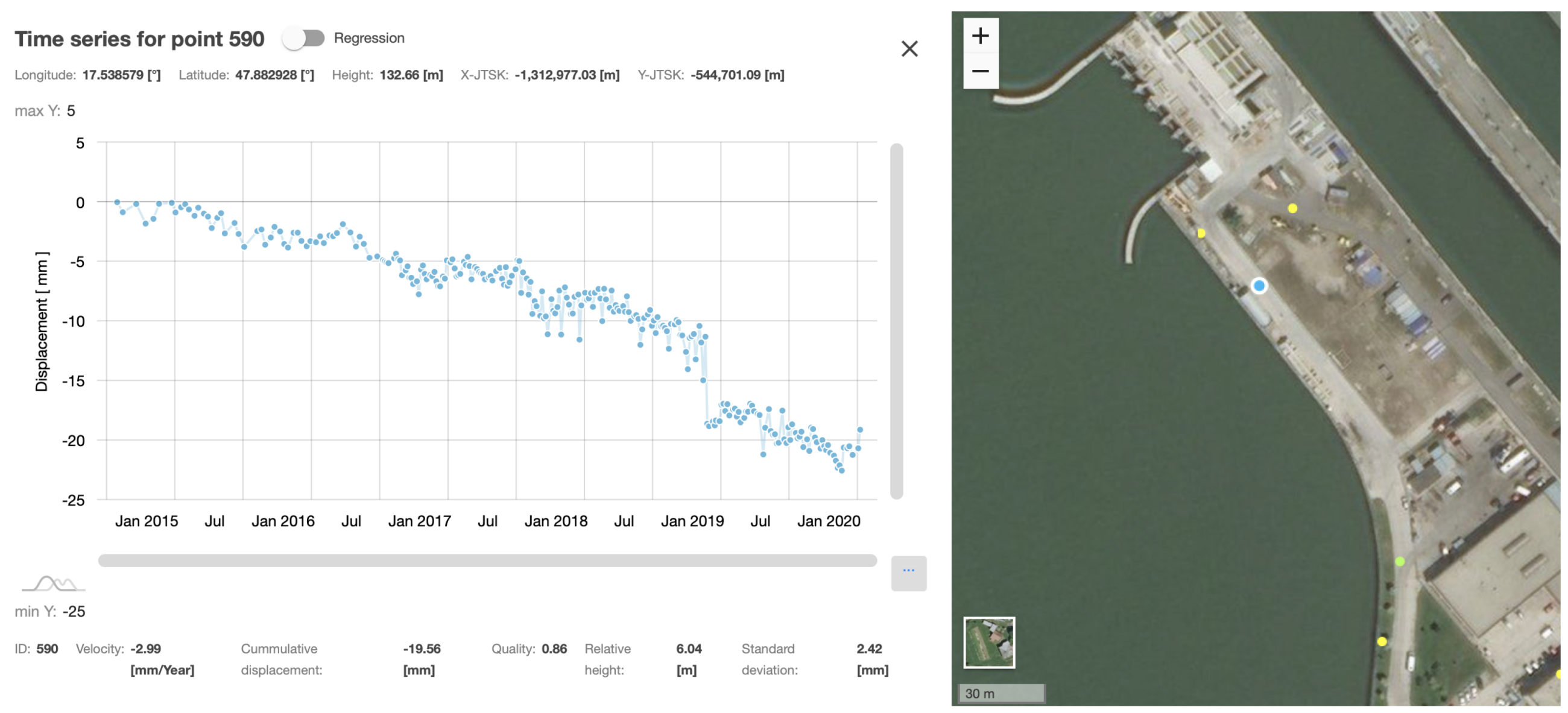
5.3. Dams (Gabcikovo Waterworks)
6. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| APS | Atmospheric Phase Screen |
| CSV | Comma-Separated Value file |
| GUI | Graphical User Interface |
| InSAR | Interferometric Synthetic Aperture Radar |
| LOS | Line-of-Sight of the Satellite |
| MT-InSAR | Multi Temporal InSAR |
| MCD | Minimum Covariance Determinant |
| PS | Persistent Scatterer |
| pts | points |
| SAR | Synthetic Aperture Radar |
| SLC | Single-Look Complex |
| TRL | Technology Readiness Level |
References
- Ferretti, A.; Prati, C.; Rocca, F. Nonlinear subsidence rate estimation using permanent scatterers in differential SAR interferometry. IEEE Trans. Geosci. Remote. Sens. 2000, 38, 2202–2212. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent Scatterers in SAR Interferometry. IEEE Trans. Geosci. Remote. Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Crosetto, M.; Monserrat, O.; Cuevas-González, M.; Devanthéry, N.; Crippa, B. Persistent Scatterer Interferometry: A review. ISPRS J. Photogramm. Remote. Sens. 2016, 115, 78–89. [Google Scholar] [CrossRef] [Green Version]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote. Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef] [Green Version]
- Werner, C.; Wegmuller, U.; Strozzi, T.; Wiesmann, A. Interferometric point target analysis for deformation mapping. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 7, pp. 4362–4364. [Google Scholar] [CrossRef]
- Strozzi, T.; Wegmuller, U.; Keusen, H.; Graf, K.; Wiesmann, A. Analysis of the terrain displacement along a funicular by SAR interferometry. IEEE Trans. Geosci. Remote. Sens. 2006, 3, 15–18. [Google Scholar] [CrossRef]
- Mora, O.; Mallorquí, J.; Broquetas, A. Linear and nonlinear terrain deformation maps from a reduced set of interferometric SAR images. IEEE Trans. Geosci. Remote. Sens. 2003, 41, 2243–2253. [Google Scholar] [CrossRef]
- Lanari, R.; Mora, O.; Manunta, M.; Mallorqui, J.; Berardino, P.; Sansosti, E. Small-baseline approach for investigating deformations on full-resolution differential SAR interferograms. IEEE Trans. Geosci. Remote. Sens. 2004, 42, 1377–1386. [Google Scholar] [CrossRef]
- Hooper, A.; Zebker, H.; Segall, P.; Kampes, B. A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers. Geophys. Res. Lett 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Hooper, A.; Segall, P.; Zebker, H. Persistent scatterer interferometric synthetic aperture radar for crustal deformation analysis, with application to Volcán Alcedo, Galápagos. J. Geophys. Res. Solid Earth 2007, 112, 1978–2012. [Google Scholar] [CrossRef] [Green Version]
- Hooper, A. Persistent Scatterer Radar Interferometry for Crustal Deformation Studies and Modeling of Volcanic Deformation. PhD Thesis, The Department of Geophysics, Stanford University, Stanford, CA, USA, 2006. [Google Scholar]
- Hooper, A. A multi-temporal InSAR method incorporating both persistent scatterer and small baseline approaches. Geophys. Res. Lett. 2008, 35, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Casu, F.; Manzo, M.; Lanari, R. A quantitative assessment of the SBAS algorithm performance for surface deformation retrieval. Remote. Sens. Environ. 2006, 102, 195–210. [Google Scholar] [CrossRef]
- Crosetto, M.; Biescas, E.; Duro, J.; Closa, J.; Arnaud, A. Generation of advanced ERS and Envisat interferometric SAR products using the Stable Point Network technique. Photogramm. Eng. Remote. Sens. 2008, 74, 443–451. [Google Scholar] [CrossRef]
- Costantini, M.; Minati, F.; Falco, S.; Malvarosa, F.; Trillo, F. Method of persistent scatterer pairs (PSP) and high resolution SAR interferometry. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; Volume 3, pp. 904–907. [Google Scholar]
- Zhang, L.; Ding, X.; Lu, Z. Ground settlement monitoring based on temporarily coherent points between two SAR acquisitions. ISPRS J. Photogramm. Remote. Sens. 2011, 66, 146–152. [Google Scholar] [CrossRef]
- Ansari, H.; De Zan, F.; Bamler, R. Sequential Estimator: Toward Efficient InSAR Time Series Analysis. IEEE Trans. Geosci. Remote. Sens. 2017, 55, 5637–5652. [Google Scholar] [CrossRef] [Green Version]
- Ansari, H.; De Zan, F.; Bamler, R. Efficient Phase Estimation for Interferogram Stacks. IEEE Trans. Geosci. Remote. Sens. 2018, 56, 4109–4125. [Google Scholar] [CrossRef]
- Cigna, F. Observing Geohazards from Space. Geosciences 2018, 8, 59. [Google Scholar] [CrossRef] [Green Version]
- Kampes, B.M. Radar Interferometry: Persistent Scatterer Technique; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Ketelaar, V.B.H. Satellite Radar Interferometry Subsidence Monitoring Techniques; Springer: Dordrecht, The Netherlands, 2009. [Google Scholar]
- Soergel, U. Radar Remote Sensing of Urban Areas; Springer Science+Bussines Media B.V.: Berlin, Germany, 2010. [Google Scholar]
- Lazecky, M.; Hlavacova, I.; Bakon, M.; Sousa, J.J.; Perissin, D.; Patricio, G. Bridge Displacements Monitoring Using Space-Borne X-Band SAR Interferometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2017, 10, 205–210. [Google Scholar] [CrossRef] [Green Version]
- Sousa, J.J.; Hlaváčová, I.; Bakoň, M.; Lazecký, M.; Patrício, G.; Guimarães, P.; Ruiz, A.M.; Bastos, L.; Sousa, A.; Bento, R. Potential of Multi-temporal InSAR Techniques for Bridges and Dams Monitoring. Procedia Technol. 2014, 16, 834–841. [Google Scholar] [CrossRef] [Green Version]
- Bakon, M.; Perissin, D.; Lazecky, M.; Papco, J. Infrastructure Non-linear Deformation Monitoring Via Satellite Radar Interferometry. Procedia Technol. 2014, 16, 294–300. [Google Scholar] [CrossRef] [Green Version]
- Frigerio, S.; Schenato, L.; Bossi, G.; Cavalli, M.; Mantovani, M.; Marcato, G.; Pasuto, A. A web-based platform for automatic and continuous landslide monitoring: The Rotolon (Eastern Italian Alps) case study. Comput. Geosci. 2014, 63, 96–105. [Google Scholar] [CrossRef]
- Raspini, F.; Bianchini, S.; Ciampalini, A.; Soldato, M.D.; Solari, L.; Novali, F.; Conte, S.D.; Rucci, A.; Ferretti, A.; Casagli, N. Continuous, semi-automatic monitoring of ground deformation using Sentinel-1 satellites. Sci. Rep. 2018, 8, 7253. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raspini, F.; Bianchini, S.; Ciampalini, A.; Soldato, M.D.; Montalti, R.; Solari, L.; Tofani, V.; Casagli, N. Persistent Scatterers continuous streaming for landslide monitoring and mapping: The case of the Tuscany region (Italy). Landslides 2019, 16, 2033–2044. [Google Scholar] [CrossRef] [Green Version]
- Soldato, M.D.; Solari, L.; Raspini, F.; Bianchini, S.; Ciampalini, A.; Montalti, R.; Ferretti, A.; Pellegrineschi, V.; Casagli, N. Monitoring Ground Instabilities Using SAR Satellite Data: A Practical Approach. ISPRS Int. J. Geo-Inf. 2019, 8, 307. [Google Scholar] [CrossRef] [Green Version]
- Kalia, A.; Frei, M.; Lege, T. A Copernicus downstream-service for the nationwide monitoring of surface displacements in Germany. Remote. Sens. Environ. 2017, 202, 234–249. [Google Scholar] [CrossRef]
- Dehls, J.F.; Larsen, Y.; Marinkovic, P.; Lauknes, T.R.; Stødle, D.; Moldestad, D.A. INSAR.No: A National Insar Deformation Mapping/Monitoring Service In Norway—From Concept To Operations. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5461–5464. [Google Scholar]
- Bischoff, C.A.; Ferretti, A.; Novali, F.; Uttini, A.; Giannico, C.; Meloni, F. Nationwide deformation monitoring with SqueeSAR® using Sentinel-1 data. Proc. Int. Assoc. Hydrol. Sci. 2020, 382, 31–37. [Google Scholar] [CrossRef] [Green Version]
- Morishita, Y.; Lazecky, M.; Wright, T.J.; Weiss, J.R.; Elliott, J.R.; Hooper, A. LiCSBAS: An Open-Source InSAR Time Series Analysis Package Integrated with the LiCSAR Automated Sentinel-1 InSAR Processor. Remote. Sens. 2020, 12, 424. [Google Scholar] [CrossRef] [Green Version]
- Confuorto, P.; Bianchini, S.; Festa, D.; Raspini, F.; Casagli, N. Continuous Monitoring of Ground Deformational Scenario of Veneto Region (Italy) through Sentinel-1 Data. 2020. Available online: https://presentations.copernicus.org/EGU2020/EGU2020-3648_presentation.pdf (accessed on 27 May 2020). [CrossRef]
- Milan, L. An Automatic InSAR Tool for Measuring and Monitoring Tectonic and Volcanic Activity. 2020. [Google Scholar] [CrossRef]
- Bakon, M.; Oliveira, I.; Perissin, D.; Sousa, J.J.; Papco, J. A Data Mining Approach for Multivariate Outlier Detection in Postprocessing of Multitemporal InSAR Results. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2017, 10, 2791–2798. [Google Scholar] [CrossRef]
- Meisina, C.; Zucca, F.; Notti, D.; Colombo, A.; Cucchi, A.; Savio, G.; Giannico, C.; Bianchi, M. Geological interpretation of PSInSAR data at regional scale. Sensors 2008, 8, 7469–7492. [Google Scholar] [CrossRef] [Green Version]
- Spata, A.; Nunnari, G.; Puglisi, G.; Guglielmino, F.; Bonforte, A.; Montalto, P. A clustering analysis of three dimensional ground deformation map estimated by integrating DInSAR and GPS dataset. In Proceedings of the 4th International Conference on Physics and Control (PhysCon 2009), Catania, Italy, 1–4 September 2009. [Google Scholar]
- Milone, G.; Scepi, G. A clustering approach for studying ground deformation trends in Campania region through PS-InSAR TM time series analysis. J. Appl. Sci. 2011, 11, 610–620. [Google Scholar]
- Lu, P.; Casagli, N.; Catani, F.; Tofani, V. Persistent Scatterers Interferometry Hotspot and Cluster Analysis (PSI-HCA) for detection of extremely slow-moving landslides. Int. J. Remote. Sens. 2012, 33, 466–489. [Google Scholar] [CrossRef]
- Berti, M.; Corsini, A.; Franceschini, S.; Iannacone, J. Automated classification of Persistent Scatterers Interferometry time series. Nat. Hazards Earth Syst. Sci. 2013, 13, 1945–1958. [Google Scholar] [CrossRef] [Green Version]
- Lu, P.; Bai, S.; Casagli, N. Investigating Spatial Patterns of Persistent Scatterer Interferometry Point Targets and Landslide Occurrences in the Arno River Basin. Remote. Sens. 2014, 6, 6817–6843. [Google Scholar] [CrossRef] [Green Version]
- Peduto, D.; Cascini, L.; Arena, L.; Ferlisi, S.; Fornaro, G.; Reale, D. A general framework and related procedures for multiscale analyses of DInSAR data in subsiding urban areas. ISPRS J. Photogramm. Remote. Sens. 2015, 105, 186–210. [Google Scholar] [CrossRef]
- Notti, D.; Calò, F.; Cigna, F.; Manunta, M.; Herrera, G.; Berti, M.; Meisina, C.; Tapete, D.; Zucca, F. A user-oriented methodology for DInSAR time series analysis and interpretation: Landslides and subsidence case studies. Pure Appl. Geophys. 2015, 172, 3081–3105. [Google Scholar] [CrossRef] [Green Version]
- In Proceedings of the Scientific & Technical Memorandum of the International Forum on Satellite EO and Geohazards, Santorini, Greece, 21–23 May 2012; Available online: http://geomorphology.irpi.cnr.it/publications/repository/public/edited-books/santorini-2012/view (accessed on 27 May 2020). [CrossRef]
- Monserrat, O.; Barra, A.; Tomás, R.; Navarro, J.; Solari, L.; Herrera, G.; Crosetto, M. Tools for Fast Analysis of InSAR Based Displacement Maps. 2020. Available online: https://doi.org/10.5194/egusphere-egu2020-18944 (accessed on 27 May 2020). [CrossRef]
- Yague-Martinez, N.; De Zan, F.; Prats-Iraola, P. Coregistration of Interferometric Stacks of Sentinel-1 TOPS Data. IEEE Geosci. Remote. Sens. Lett. 2017, 14, 1002–1006. [Google Scholar] [CrossRef] [Green Version]
- Perissin, D.; Rocca, F. High-Accuracy Urban DEM Using Permanent Scatterers. IEEE Trans. Geosci. Remote. Sens. 2006, 44, 3338–3347. [Google Scholar] [CrossRef]
- Perissin, D. SAR Super-Resolution and Characterization of Urban Targets; Dipartimento di Elettronica e Informazione: Via Giuseppe Ponzio, Milano, Italy, 2006. [Google Scholar]
- Perissin, D.; Prati, C.; Rocca, F. ASAR parallel-track PS analysis in urban sites. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Lei, L.; Perissin, D.; Qin, Y. Change detection with spaceborne InSAR technique in Hong Kong. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 338–341. [Google Scholar] [CrossRef]
- Samieie-Esfahany, S.; Hanssen, R.; van Thienen-Visser, K.; Muntendam-Bos, A. On the effect of horizontal deformation on InSAR subsidence estimates. In Proceedings of the Fringe 2009 Workshop, Frascati, Italy, 30 November–4 December 2009; Volume 30. [Google Scholar]
- Perissin, D. SARproZ Software. Official Product Web Page. Available online: http://www.sarproz.com/ (accessed on 27 May 2020).
- Li, Z.; Wright, T.; Hooper, A.; Crippa, P.; Gonzalez, P.; Walters, R.; Elliott, J.; Ebmeier, S.; Hatton, E.; Parsons, B. TOWARDS INSAR EVERYWHERE, ALL THE TIME, WITH SENTINEL-1. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2016, XLI-B4, 763–766. [Google Scholar] [CrossRef] [Green Version]
- Czikhardt, R.; Papco, J.; Bakon, M.; Liscak, P.; Ondrejka, P.; Zlocha, M. Ground Stability Monitoring of Undermined and Landslide Prone Areas by Means of Sentinel-1 Multi-Temporal InSAR, Case Study from Slovakia. Geosciences 2017, 7, 87. [Google Scholar] [CrossRef] [Green Version]
- Rousseeuw, P.J. Least Median of Squares Regression. J. Am. Stat. Assoc. 1984, 79, 871–880. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. Multivariate estimation with high breakdown point. Mathematical statistics and applications. J. Am. Stat. Assoc. 1985, 8, 283–297. [Google Scholar]
- Rousseeuw, P.J.; Driessen, K.V. A Fast Algorithm for the Minimum Covariance Determinant Estimator. Technometrics 1999, 41, 212–223. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Bentley, J.L. Multidimensional binary search trees used for associative searching. Commun. ACM 1975, 18, 509–517. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020. [Google Scholar] [CrossRef] [Green Version]
- Tarjan, R. Depth-First Search and Linear Graph Algorithms. SIAM J. Comput. 1972, 1, 146–160. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Kluwer Academic: Dordrecht, The Netherlands, 2001. [Google Scholar]
- Zhang, R.; Liu, G.; Li, Z.; Zhang, G.; Lin, H.; Yu, B.; Wang, X. A Hierarchical Approach to Persistent Scatterer Network Construction and Deformation Time Series Estimation. Remote. Sens. 2014, 7, 211. [Google Scholar] [CrossRef]
- Miller, J. Short Report: Reaction Time Analysis with Outlier Exclusion: Bias Varies with Sample Size. Q. J. Exp. Psychol. Sect. 1991, 43, 907–912. [Google Scholar] [CrossRef] [PubMed]
- Leys, C.; Ley, C.; Klein, O.; Bernard, P.; Licata, L. Detecting outliers: Do not use standard deviation around the mean, use absolute deviation around the median. J. Exp. Soc. Psychol. 2013, 49, 764–766. [Google Scholar] [CrossRef] [Green Version]
- Hubert, M.; Verboven, S. A robust PCR method for high-dimensional regressors. J. Chemom. 2003, 17, 438–452. [Google Scholar] [CrossRef] [Green Version]
- Wegmüller, U.; Werner, C.; Strozzi, T.; Wiesmann, A.; Spreckels, V.; Benecke, N.; Walter, D. Monitoring of mining induced surface deformation. In Proceedings of the IGARSS 2004. 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004. [Google Scholar]
- Wegmüller, U.; Walter, D.; Spreckels, V.; Werner, C. Nonuniform Ground Motion Monitoring With TerraSAR-X Persistent Scatterer Interferometry. IEEE Trans. Geosci. Remote. Sens. 2010, 48, 895–904. [Google Scholar] [CrossRef]
- Chang, L.; Hanssen, R. A Probabilistic Approach for InSAR Time-series Postprocessing. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 421–430. [Google Scholar] [CrossRef] [Green Version]
- Van de Kerkhof, B.; Pankratius, V.; Chang, L.; van Swol, R.; Hanssen, R.F. Individual Scatterer Model Learning for Satellite Interferometry. IEEE Trans. Geosci. Remote. Sens. 2020, 58, 1273–1280. [Google Scholar] [CrossRef]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A New Algorithm for Processing Interferometric Data-Stacks: SqueeSAR. IEEE Trans. Geosci. Remote. Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Perissin, D.; Wang, T. Repeat-Pass SAR Interferometry with Partially Coherent Targets. IEEE Trans. Geosci. Remote. Sens. 2012, 50, 271–280. [Google Scholar] [CrossRef]
- Hu, F.; Wu, J.; Chang, L.; Hanssen, R.F. Incorporating Temporary Coherent Scatterers in Multi-Temporal InSAR Using Adaptive Temporal Subsets. IEEE Trans. Geosci. Remote. Sens. 2019, 57, 7658–7670. [Google Scholar] [CrossRef] [Green Version]
- Czikhardt, R.; Papco, J.; Bakon, M. Sentinel-1 state-wide multi-temporal InSAR processing for recognition of active natural hazards in Slovakia. In Proceedings of the European Space Agency (ESA) Living Planet Symposium 2019, MiCo-Milano Congressi, Milan, Italy, 13–17 May 2019. [Google Scholar]
- Larsen, Y.; Marinkovic, P.; Dehls, J.F.; Bredal, M.; Bishop, C.; Jøkulsson, G.; Gjøvik, L.P.; Frauenfelder, R.; Salazar, S.E.; Vöge, M.; et al. European Ground Motion Service: Service Implementation Plan and Product Specification Document. Available online: https://land.copernicus.eu/user-corner/technical-library/egms-specification-and-implementation-plan (accessed on 27 May 2020).
- Insar.sk Ltd. remotIO Web-based Application. Official Product Web Page. Available online: https://remotio.space (accessed on 27 May 2020).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pilot Scenario | Track | Orbit Path | Images | Time Period |
|---|---|---|---|---|
| (1) Landslides and (2) Mining subsidence | 175 | Ascending | 261 | 17 October 2014–13 March 2020 |
| 51 | Descending | 245 | 21 October 2014–11 March 2020 | |
| (3) Dams (Gabcikovo Waterworks) | 73 | Ascending | 251 | 10 October 2014–12 March 2020 |
| 124 | Descending | 255 | 14 October 2014–04 March 2020 |
| Level No. | Description | Resolution |
|---|---|---|
| Level 0 | Line-of-sight (LOS) velocities [mm/year] decomposed into vertical and horizontal vectors | coarse (50–100 m grid) |
| Level 1 | Line-of-sight (LOS) velocities [mm/year] | fine (full-resolution of SLC product) |
| Level 2 | Line-of-sight (LOS) velocities [mm/year] + displacement time series [mm/per acquisition] | fine (full-resolution of SLC product) |
| Level 3 | Level 2 + additional decision-support information (e.g., Low-coherent alerts, Displacement alarms) | fine (full-resolution of SLC product) |
| Class | Evaluation | Velocity | Height | Most Common Behavior | Decision | Decision Label |
|---|---|---|---|---|---|---|
| Outliers final | 0 | 0 | Outlier | |||
| Inliers final | 1 | 1 | Inlier | |||
| N/A | N/A | Isolated problem | ||||
| 0 | 0 | Unknown problem | ||||
| 0 | 1 | Height problem | ||||
| 1 | 0 | Velocity problem | ||||
| 1 | 1 | Velocity + Height Problem | ||||
| Low-Coherent Alerts | 1 | 0 | 10, 11, 1011, 1110 | Velocity Alert | ||
| 1 | 1 | 10, 11, 1011, 1110 | Velocity + Height Alert | |||
| Displacement Alarms | Step 5: Time Series Warning | |||||
| Parameter | Delta | Risk Rating | Current Condition |
|---|---|---|---|
| Displacement Alarm | <2 mm | 0—Normal | |
| 2–5 mm | 1—Minor | ||
| 5–10 mm | 2—Moderate | ||
| 10–15 mm | 3—Significant | ||
| >15 mm | 4—Major * | ||
| N/A | 5—Out of Service | ||
| Current Condition | + (positive) | ▲ Rising | |
| − (negative) | ▼ Falling |
| Properties Comparison | Processing Time (Seconds) | ||||
|---|---|---|---|---|---|
| Property | Old Version | New Version | Number of Points | Old Version | New Version |
| Programming Language | Matlab | Python | 100,000 | 80,798 s | 3012 s |
| Interface | GUI | Script | 50,000 | 11,742 s | 1304 s |
| Operation/Control | Manual | Automatic | 20,000 | 4498 s | 462 s |
| Platform Requirements | Matlab based | Independent | 10,000 | 1887 s | 260 s |
| Speed/Efficiency | Slow | Fast | 5000 * | 1095 s | 116 s |
| Computational demands | High | Low | 2000 * | 470 s | 45 s |
| Compact | No | Yes | 1000 | 257 s | 24 s |
| Time Series Warning | No | Yes | 500 | 131 s | 13 s |
| MT-InSAR Output | Data Mining OFF | Data Mining ON | |||||
|---|---|---|---|---|---|---|---|
| Pilot Scenario | Track | Orbit | All Points | Coherence > 0.7 | Inliers | Alerts | Alarms |
| (1) Landslides | |||||||
| Prievidza districts | 175 | Asc. | 1846 | 411 | 725 | 7 | 32 |
| Prievidza districts | 51 | Desc. | 2361 | 507 | 886 | 19 | 53 |
| (2) Mining subsidence | |||||||
| Kos municipality | 175 | Asc. | 1424 | 409 | 716 | 9 | 49 |
| Kos municipality | 51 | Desc. | 1797 | 562 | 877 | 10 | 63 |
| (3) Dams | |||||||
| Cunovo dam | 73 | Asc. | 4097 | 1693 | 2465 | 18 | 85 |
| Cunovo dam | 124 | Desc. | 3641 | 1510 | 2167 | 8 | 68 |
| Gabcikovo dam | 73 | Asc. | 1242 | 397 | 748 | 5 | 35 |
| Gabcikovo dam | 124 | Desc. | 1165 | 349 | 667 | 7 | 34 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bakon, M.; Czikhardt, R.; Papco, J.; Barlak, J.; Rovnak, M.; Adamisin, P.; Perissin, D. remotIO: A Sentinel-1 Multi-Temporal InSAR Infrastructure Monitoring Service with Automatic Updates and Data Mining Capabilities. Remote Sens. 2020, 12, 1892. https://doi.org/10.3390/rs12111892
Bakon M, Czikhardt R, Papco J, Barlak J, Rovnak M, Adamisin P, Perissin D. remotIO: A Sentinel-1 Multi-Temporal InSAR Infrastructure Monitoring Service with Automatic Updates and Data Mining Capabilities. Remote Sensing. 2020; 12(11):1892. https://doi.org/10.3390/rs12111892
Chicago/Turabian StyleBakon, Matus, Richard Czikhardt, Juraj Papco, Jan Barlak, Martin Rovnak, Peter Adamisin, and Daniele Perissin. 2020. "remotIO: A Sentinel-1 Multi-Temporal InSAR Infrastructure Monitoring Service with Automatic Updates and Data Mining Capabilities" Remote Sensing 12, no. 11: 1892. https://doi.org/10.3390/rs12111892
APA StyleBakon, M., Czikhardt, R., Papco, J., Barlak, J., Rovnak, M., Adamisin, P., & Perissin, D. (2020). remotIO: A Sentinel-1 Multi-Temporal InSAR Infrastructure Monitoring Service with Automatic Updates and Data Mining Capabilities. Remote Sensing, 12(11), 1892. https://doi.org/10.3390/rs12111892