A Method to Automatically Detect Changes in Multitemporal Spectral Indices: Application to Natural Disaster Damage Assessment


Abstract
1. Introduction
2. Materials and Methods
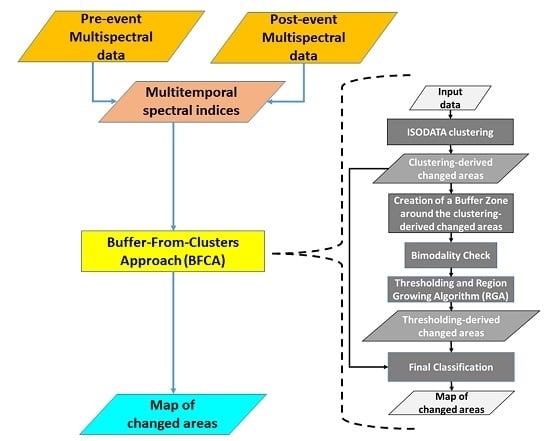
2.1. The Buffer-From-Cluster Approach
2.1.1. Clustering and Creation of the Buffer Zone
2.1.2. Bimodality Check
2.1.3. Thresholding and Region Growing
2.1.4. Final Classification
- Pixels belonging to both clustering-derived and thresholding-derived changed areas are classified as changed.
- Pixels belonging only to the clustering-derived changed area are classified as changed if the corresponding cluster includes seed pixels.
- Pixels belonging only to the thresholding-derived changed area are classified as changed if they are located in a buffer zone of buffering distance 50 pixels created around the changed area determined according to points A and B.
2.2. Data
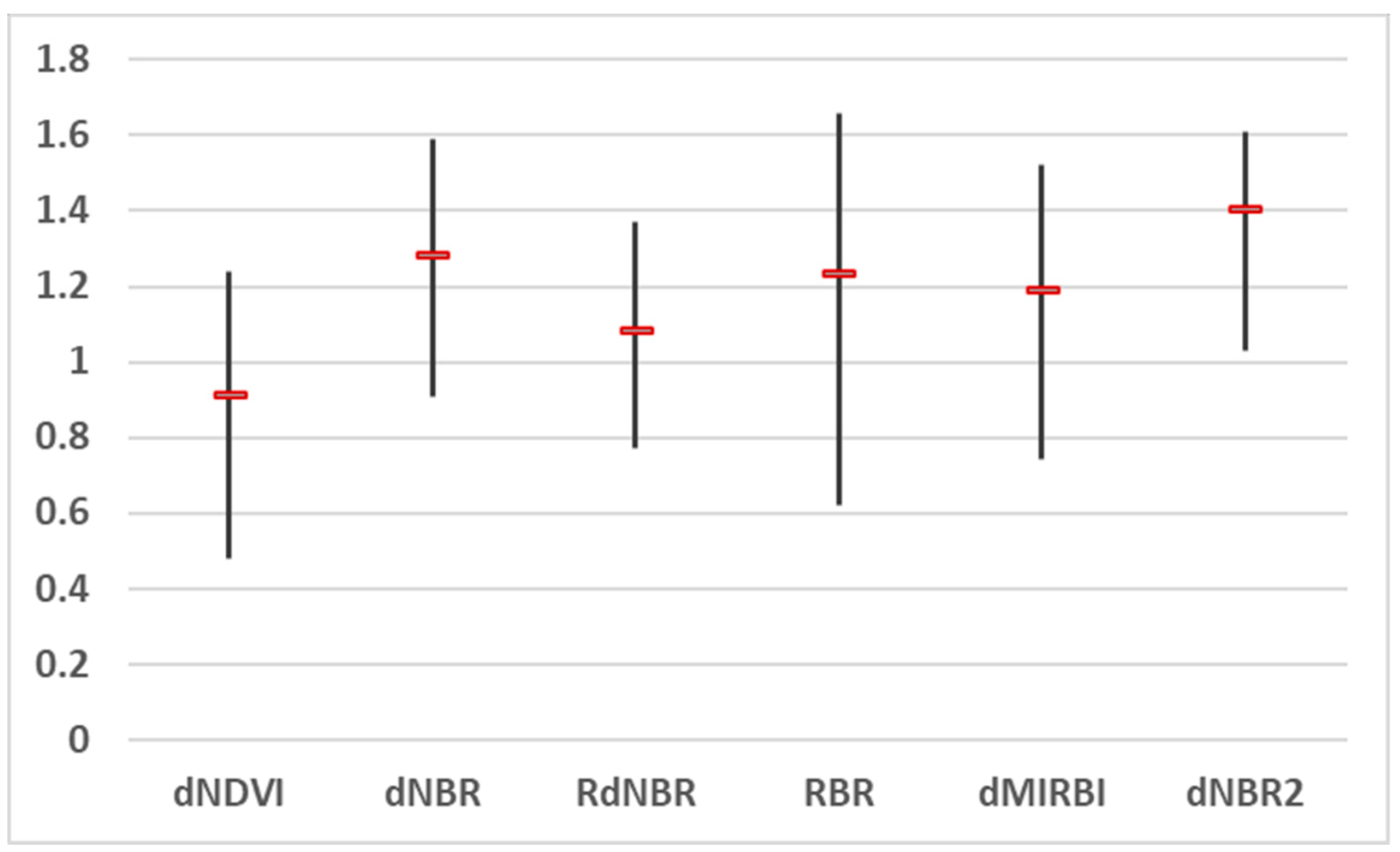
2.3. Selection of Fire Spectral Indices for the Buffer-From-Cluster Approach
2.4. Application of the Buffer-From-Cluster Approach to Burned Area Mapping
2.5. Water Index and Application of the Buffer-From-Cluster Approach to Flood Mapping
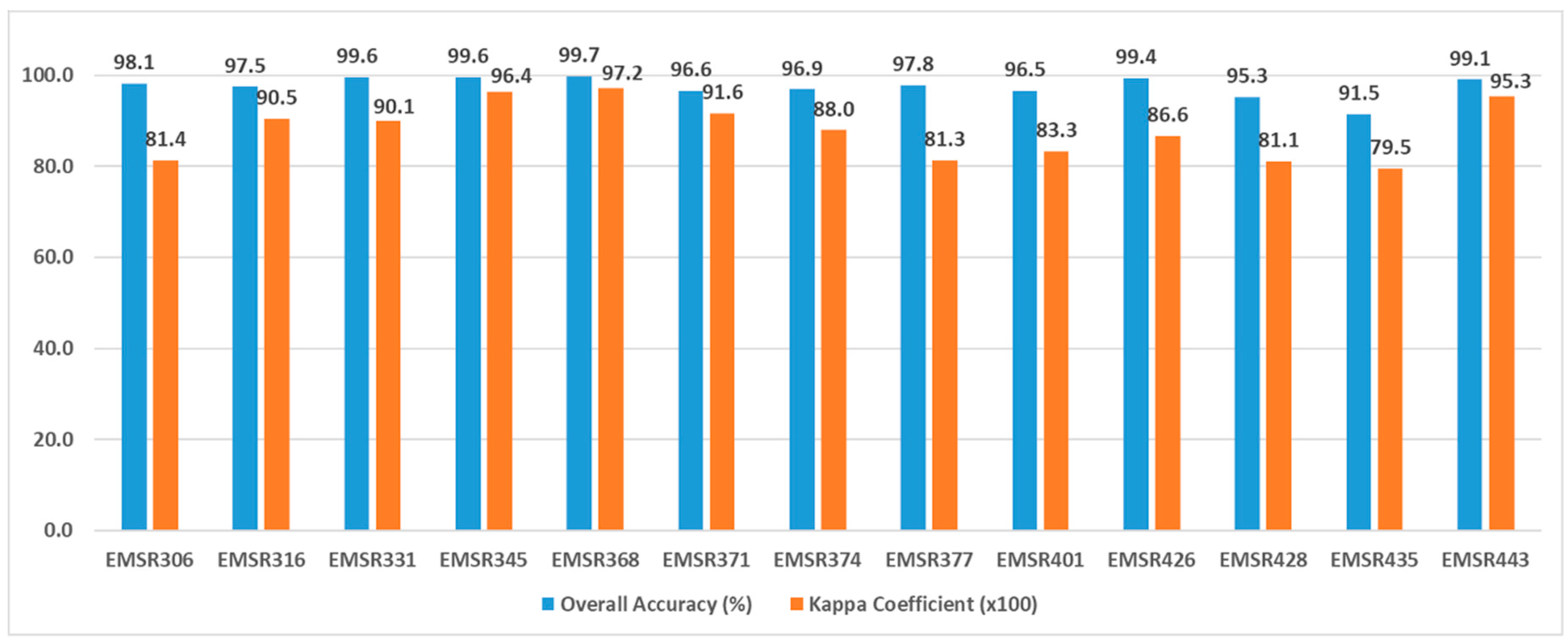
2.6. Validation
3. Results
4. Discussion
4.1. Computational Efficiency and Accuracy
4.2. Combination of Different Image Processing Techniques
4.3. Maximum Number of Clusters and Initail Buffering Distance
5. Conclusions and Perspectives
Author Contributions
Funding
Conflicts of Interest
References
- Dilley, M.; Chen, R.S.; Deichmann, U.; Lerner-Lam, A.; Arnold, M.; Agwe, J.; Buys, P.; Kjekstad, O.; Lyon, B.; Yetman, G. Natural Disaster Hotspots: A Global Risk Analysis; World Bank Publications: Washington, DC, USA, 2005. [Google Scholar]
- Petiteville, I.; Ward, S.; Dyke, G.; Steventon, M.; Harry, J. Satellite Earth Observations in Support of Disaster Risk Reduction; Special 2015 WCDRR Edition; ESA Publication: Auckland, New Zealand, 2015. [Google Scholar]
- Lu, D.; Li, G.; Moran, E. Current situation and needs of change detection techniques. Int. J. Image Data Fusion 2014, 5, 13–38. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A Split-Based Approach to Unsupervised Change Detection in Large-Size Multitemporal Images: Application to Tsunami-Damage Assessment. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1658–1669. [Google Scholar] [CrossRef]
- Bruzzone, L.; Prieto, D.F. Automatic analysis of the difference image for unsupervised change detection. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1171–1182. [Google Scholar] [CrossRef]
- Li, H. Accurate and efficient classification based on common principal components analysis for multivariate time series. Neurocomputing 2016, 171, 744–753. [Google Scholar] [CrossRef]
- Celik, T. Unsupervised change detection in satellite images using principal component analysis and κ-means clustering. IEEE Geosci. Remote Sens. Lett. 2009, 6, 772–776. [Google Scholar] [CrossRef]
- Chen, J.; Gong, P.; He, C.; Pu, R.; Shi, P. Land-use/land-cover change detection using improved change-vector analysis. Photogramm. Eng. Remote Sens. 2003, 69, 369–379. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A theoretical framework for unsupervised change detection based on change vector analysis in the polar domain. IEEE Trans. Geosci. Remote Sens. 2007, 45, 218–236. [Google Scholar] [CrossRef]
- Nordberg, M.L.; Evertson, J. Vegetation index differencing and linear regression for change detection in a Swedish mountain range using Landsat TM® and ETM+® imagery. L. Degrad. Dev. 2005, 16, 139–149. [Google Scholar] [CrossRef]
- Tewkesbury, A.P.; Comber, A.J.; Tate, N.J.; Lamb, A.; Fisher, P.F. A critical synthesis of remotely sensed optical image change detection techniques. Remote Sens. Environ. 2015, 160, 1–14. [Google Scholar] [CrossRef]
- Ban, Y.; Yousif, O. Change Detection Techniques: A Review. In Multitemporal Remote Sensing: Methods and Applications; Ban, Y., Ed.; Springer International Publishing: Cham, Switzerland, 2016; pp. 19–43. ISBN 978-3-319-47037-5. [Google Scholar]
- Kittler, J.; Illingworth, J. Minimum error thresholding. Pattern Recognit. 1986, 19, 41–47. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray Level Histograms. IEEE Trans. Syst. Man. Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Rogerson, P.A. Change detection thresholds for remotely sensed images. J. Geogr. Syst. 2002, 4, 85–97. [Google Scholar] [CrossRef]
- Glasbey, C.A. An Analysis of Histogram-Based Thresholding Algorithms. Graph. Models Image Process. 1993, 55, 532–537. [Google Scholar] [CrossRef]
- Zhan, Y.; Zhang, G. An improved OTSU algorithm using histogram accumulation moment for ore segmentation. Symmetry 2019, 11, 431. [Google Scholar] [CrossRef]
- Kapur, J.N.; Sahoo, P.K.; Wong, A.K.C. A new method for gray-level picture thresholding using the entropy of the histogram. Comput. Vis. Graph. Image Process. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Chini, M.; Hostache, R.; Giustarini, L.; Matgen, P. A hierarchical split-based approach for parametric thresholding of SAR images: Flood inundation as a test case. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6975–6988. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shapiro, L.G. Survey: Image Segmentation Techniques. Comput. Vis. Graph. Image Process. 1985, 29, 100–132. [Google Scholar] [CrossRef]
- Adams, R.; Bischof, L. Seeded Region Growing. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 641–647. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Squicciarino, G.; Fiori, E.; Fiorucci, P.; Ferraris, L.; Negro, D.; Gollini, A.; Severino, M.; Puca, S. An automatic processing chain for near real-time mapping of burned forest areas using sentinel-2 data. Remote Sens. 2020, 12, 674. [Google Scholar] [CrossRef]
- Stroppiana, D.; Bordogna, G.; Carrara, P.; Boschetti, M.; Boschetti, L.; Brivio, P.A. A method for extracting burned areas from Landsat TM/ETM+ images by soft aggregation of multiple Spectral Indices and a region growing algorithm. ISPRS J. Photogramm. Remote Sens. 2012, 69, 88–102. [Google Scholar] [CrossRef]
- Plank, S.; Martinis, S. A fully automatic burnt area mapping processor based on AVHRR Imagery-A TIMELINE thematic processor. Remote Sens. 2018, 10, 341. [Google Scholar] [CrossRef]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffmann, L.; Savenije, H.H.G. Towards an automated SAR-based flood monitoring system: Lessons learned from two case studies. Phys. Chem. Earth 2011, 36, 241–252. [Google Scholar] [CrossRef]
- Stroppiana, D.; Boschetti, M.; Azar, R.; Barbieri, M.; Collivignarelli, F.; Gatti, L.; Fontanelli, G.; Busetto, L.; Holecz, F. In-season early mapping of rice area and flooding dynamics from optical and SAR satellite data. Eur. J. Remote Sens. 2019, 52, 206–220. [Google Scholar] [CrossRef]
- Lizundia-Loiola, J.; Otón, G.; Ramo, R.; Chuvieco, E. A spatio-temporal active-fire clustering approach for global burned area mapping at 250 m from MODIS data. Remote Sens. Environ. 2020, 236, 111493. [Google Scholar] [CrossRef]
- Smiraglia, D.; Filipponi, F.; Mandrone, S.; Tornato, A.; Taramelli, A. Agreement index for burned area mapping: Integration of multiple spectral indices using Sentinel-2 satellite images. Remote Sens. 2020, 12, 1862. [Google Scholar] [CrossRef]
- Richards, J.A.; Jia, X. Remote Sensing Digital Image Analysis: An Introduction; Springer: Berlin/Heidelberg, Germany, 2006; ISBN 3540251286. [Google Scholar]
- Vilasa, L.; Miralles, D.G.; De Jeu, R.A.M.; Dolman, A.J. Global soil moisture bimodality in satellite observations and climate models. J. Geophys. Res. Atmos. 2017, 122, 4299–4311. [Google Scholar] [CrossRef]
- Guide, S.A.S.U. SAS/STAT User’s Guide, version 6; SAS Institute Inc.: Cary, NC, USA, 1990. [Google Scholar]
- Pfister, R.; Schwarz, K.A.; Janczyk, M.; Dale, R.; Freeman, J.B. Good things peak in pairs: A note on the bimodality coefficient. Front. Psychol. 2013, 4, 700. [Google Scholar] [CrossRef]
- Ashman, K.A.; Bird, C.M.; Zepf, S.E. Detecting bimodality in astronomical datasets. Astron. J. 1994, 108, 2348–2361. [Google Scholar] [CrossRef]
- Boni, G.; Ferraris, L.; Pulvirenti, L.; Squicciarino, G.; Pierdicca, N.; Candela, L.; Pisani, A.R.; Zoffoli, S.; Onori, R.; Proietti, C.; et al. A Prototype System for Flood Monitoring Based on Flood Forecast Combined with COSMO-SkyMed and Sentinel-1 Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2794–2805. [Google Scholar] [CrossRef]
- European Environment Agency, Corine Land Cover. 2018. Available online: https://land.copernicus.eu/pan-european/corine-land-cover/clc2018 (accessed on 14 August 2020).
- Kaufman, Y.J.; Remer, L.A. Detection of Forests Using Mid-IR Reflectance: An Application for Aerosol Studies. IEEE Trans. Geosci. Remote Sens. 1994, 32, 672–683. [Google Scholar] [CrossRef]
- Lasaponara, R. Estimating spectral separability of satellite derived parameters for burned areas mapping in the Calabria region by using SPOT-Vegetation data. Ecol. Modell. 2006, 196, 265–270. [Google Scholar] [CrossRef]
- Roteta, E.; Bastarrika, A.; Padilla, M.; Storm, T.; Chuvieco, E. Development of a Sentinel-2 burned area algorithm: Generation of a small fire database for sub-Saharan Africa. Remote Sens. Environ. 2019, 222, 1–17. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and Photographic Infrared Linear Combinations for Monitoring Vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Key, C.H.; Benson, N. The Normalized Burn Ratio (NBR): A Landsat TM Radiometric Measure of Burn Severity; Northern Rocky Mountain Science Center: Bozeman, MT, USA, 1999.
- Navarro, G.; Caballero, I.; Silva, G.; Parra, P.C.; Vázquez, Á.; Caldeira, R. Evaluation of forest fire on Madeira Island using Sentinel-2A MSI imagery. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 97–106. [Google Scholar] [CrossRef]
- García, M.J.L.; Caselles, V. Mapping burns and natural reforestation using thematic mapper data. Geocarto Int. 1991, 6, 31–37. [Google Scholar] [CrossRef]
- Trigg, S.; Flasse, S. An evaluation of different bi-spectral spaces for discriminating burned shrub-savannah. Int. J. Remote Sens. 2001, 22, 2641–2647. [Google Scholar] [CrossRef]
- Miller, J.D.; Thode, A.E. Quantifying burn severity in a heterogeneous landscape with a relative version of the delta Normalized Burn Ratio (dNBR). Remote Sens. Environ. 2007, 109, 66–80. [Google Scholar] [CrossRef]
- Parks, S.A.; Dillon, G.K.; Miller, C. A new metric for quantifying burn severity: The relativized burn ratio. Remote Sens. 2014, 6, 1827–1844. [Google Scholar] [CrossRef]
- Botella-Martínez, M.A.; Fernández-Manso, A. Estudio de la severidad post-incendio en la comunidad Valenciana comparando los índices dNBR, RdNBR y RBR a partir de imágenes landsat 8. Rev. Teledetec. 2017, 2017, 33–47. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Filipponi, F. Exploitation of Sentinel-2 Time Series to Map Burned Areas at the National Level: A Case Study on the 2017 Italy Wildfires. Remote Sens. 2019, 11, 622. [Google Scholar] [CrossRef]
- Chuvieco, E.; Mouillot, F.; van der Werf, G.R.; San Miguel, J.; Tanasse, M.; Koutsias, N.; García, M.; Yebra, M.; Padilla, M.; Gitas, I.; et al. Historical background and current developments for mapping burned area from satellite Earth observation. Remote Sens. Environ. 2019, 225, 45–64. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water bodies’ mapping from Sentinel-2 imagery with Modified Normalized Difference Water Index at 10-m spatial resolution produced by sharpening the swir band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef]
- Goffi, A.; Stroppiana, D.; Brivio, P.A.; Bordogna, G.; Boschetti, M. Towards an automated approach to map flooded areas from Sentinel-2 MSI data and soft integration of water spectral features. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101951. [Google Scholar] [CrossRef]
- Pierdicca, N.; Pulvirenti, L.; Chini, M.; Guerriero, L.; Candela, L. Observing floods from space: Experience gained from COSMO-SkyMed observations. Acta Astronaut. 2013, 84, 122–123. [Google Scholar] [CrossRef]
- Chini, M.; Pelich, R.; Pulvirenti, L.; Pierdicca, N.; Hostache, R.; Matgen, P. Sentinel-1 InSAR Coherence to Detect Floodwater in Urban Areas: Houston and Hurricane Harvey as A Test Case. Remote Sens. 2019, 11, 107. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Boni, G. Use of SAR data for detecting floodwater in urban and agricultural areas: The role of the interferometric coherence. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1532–1544. [Google Scholar] [CrossRef]
- Bastarrika, A.; Chuvieco, E.; Martín, M.P. Mapping burned areas from landsat TM/ETM+ data with a two-phase algorithm: Balancing omission and commission errors. Remote Sens. Environ. 2011, 115, 1003–1012. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CEMS Activation Code | Time Period | Country | Location | Flooded Area [km2] |
|---|---|---|---|---|
| EMSR342 | February 2019 | Australia | South Normanton | 1987.1 |
| CEMS Activation Code | Time Period | Country | Location | Most Affected Vegetation | Burned Area [km2] |
|---|---|---|---|---|---|
| EMSR306 | August 2018 | Greece | Evia Island | Pine forest | 4.4 |
| EMSR316 | September 2018 | Italy | Calci | Forest, olive groves | 10.8 |
| EMSR331 | October 2018 | Greece | Sithonia | Pine forest | 8.1 |
| EMSR345 | February 2019 | Kenia | Mount Kenia | Moorland, bamboo forest | 141.4 |
| EMSR368 | June 2019 | Spain | Castile and León | Forest and shrubland | 15.5 |
| EMSR371 | July 2019 | Italy | Tortolì | Mediterranean scrub | 6.9 |
| EMSR374 | July 2019 | Italy | Siniscola | Mediterranean scrub, agricultural areas | 5.8 |
| EMSR377 | August 2019 | Italy | Dualchi | Mediterranean scrub | 3.4 |
| EMSR401 | October 2019 | Italy | Bosa | Mediterranean scrub | 1.2 |
| EMSR426 | February 2020 | France | Olmeta di Tuda | Mediterranean scrub | 3.2 |
| EMSR428 | February 2020 | Spain | Tasarte | Pine forest | 9.9 |
| EMSR435 | April 2020 | Ukraine | Chernobyl | Pine forest, agricultural areas | 169.8 |
| EMSR443 | June 2020 | Portugal | Barao de Sao Joao | Pine and eucalyptus | 23.0 |
| CEMS Activation Code | Sentinel-2 Data | |
|---|---|---|
| EMSR342 | S2B_MSIL2A_20190105T004709_N0211_R102_T54KVE_20190105T024138 | pre-flood |
| S2B_MSIL2A_20190105T004709_N0211_R102_T54KVF_20190105T024138 | pre-flood | |
| S2B_MSIL2A_20190105T004709_N0211_R102_T54KWE_20190105T024138 | pre-flood | |
| S2B_MSIL2A_20190105T004709_N0211_R102_T54KWF_20190105T024138 | pre-flood | |
| S2B_MSIL2A_20190214T004709_N0211_R102_T54KVE_20190214T024656 | post-flood | |
| S2B_MSIL2A_20190214T004709_N0211_R102_T54KVF_20190214T024656 | post-flood | |
| S2B_MSIL2A_20190214T004709_N0211_R102_T54KWE_20190214T024656 | post-flood | |
| S2B_MSIL2A_20190214T004709_N0211_R102_T54KWF_20190214T024656 | post-flood | |
| CEMS Activation Code | Sentinel-2 Data | |
|---|---|---|
| EMSR306 | S2A_MSIL2A_20180531T091031_N0208_R050_T34SGH_20180531T120702 | pre-fire |
| S2B_MSIL2A_20180814T090549_N0208_R050_T34SGH_20180814T180143 | post-fire | |
| EMSR316 | S2A_MSIL2A_20180926T101021_N0208_R022_T32TPP_20180926T191545 | pre-fire |
| S2A_MSIL2A_20180926T101021_N0208_R022_T32TPP_20180926T191545 | post-fire | |
| EMSR331 | S2A_MSIL2A_20181018T090951_N0209_R093_T35TKE_20181018T122725 | pre-fire |
| S2B_MSIL2A_20181026T092049_N0209_R093_T35TKE_20181026T114842 | post-fire | |
| EMSR345 | S2A_MSIL2A_20190218T073951_N0211_R092_T37MCV_20190218T102547 | pre-fire |
| S2A_MSIL2A_20190228T073841_N0211_R092_T37MCV_20190228T102340 | post-fire | |
| EMSR368 | S2A_MSIL2A_20190512T110621_N0212_R137_T30TUK_20190512T122956 | pre-fire |
| S2A_MSIL2A_20190701T110621_N0212_R137_T30TUK_20190701T120906 | post-fire | |
| EMSR371 | S2A_MSIL2A_20190713T101031_N0213_R022_T32TNK_20190713T135651 | pre-fire |
| S2B_MSIL2A_20190718T101039_N0213_R022_T32TNK_20190718T144057 | post-fire | |
| EMSR374 | S2A_MSIL2A_20190723T101031_N0213_R022_T32TNK_20190723T125722 | pre-fire |
| S2A_MSIL2A_20190802T101031_N0213_R022_T32TNK_20190802T114341 | post-fire | |
| EMSR377 | S2B_MSIL2A_20190731T102029_N0213_R065_T32TMK_20190731T145020 | pre-fire |
| S2B_MSIL2A_20190810T102029_N0213_R065_T32TMK_20190810T134755 | post-fire | |
| EMSR401 | S2B_MSIL2A_20190929T102029_N0213_R065_T32TMK_20190929T135206 | pre-fire |
| S2B_MSIL2A_20191026T101029_N0213_R022_T32TMK_20191026T133255 | post-fire | |
| EMSR426 | S2B_MSIL2A_20200206T102109_N0214_R065_T32TNN_20200206T140634 | pre-fire |
| S2A_MSIL2A_20200211T102141_N0214_R065_T32TNN_20200211T115801 | post-fire | |
| EMSR428 | S2B_MSIL2A_20200220T115219_N0214_R123_T28RDR_20200220T141320 | pre-fire |
| S2A_MSIL2A_20200225T115211_N0214_R123_T28RDR_20200225T125637 | post-fire | |
| EMSR435 | S2A_MSIL2A_20200407T085551_N0214_R007_T35UQS_20200407T115339 | pre-fire |
| S2B_MSIL2A_20200412T085549_N0214_R007_T35UQS_20200412T120821 | post-fire | |
| EMSR443 | S2A_MSIL2A_20200618T112121_N0214_R037_T29SNB_20200618T141236 | pre-fire |
| S2B_MSIL2A_20200623T112119_N0214_R037_T29SNB_20200623T143258 | post-fire | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pulvirenti, L.; Squicciarino, G.; Fiori, E. A Method to Automatically Detect Changes in Multitemporal Spectral Indices: Application to Natural Disaster Damage Assessment. Remote Sens. 2020, 12, 2681. https://doi.org/10.3390/rs12172681
Pulvirenti L, Squicciarino G, Fiori E. A Method to Automatically Detect Changes in Multitemporal Spectral Indices: Application to Natural Disaster Damage Assessment. Remote Sensing. 2020; 12(17):2681. https://doi.org/10.3390/rs12172681
Chicago/Turabian StylePulvirenti, Luca, Giuseppe Squicciarino, and Elisabetta Fiori. 2020. "A Method to Automatically Detect Changes in Multitemporal Spectral Indices: Application to Natural Disaster Damage Assessment" Remote Sensing 12, no. 17: 2681. https://doi.org/10.3390/rs12172681
APA StylePulvirenti, L., Squicciarino, G., & Fiori, E. (2020). A Method to Automatically Detect Changes in Multitemporal Spectral Indices: Application to Natural Disaster Damage Assessment. Remote Sensing, 12(17), 2681. https://doi.org/10.3390/rs12172681