
Advanced Dual-Satellite Method for Detection of Low Stratus and Fog near Japan at Dawn from FY-4A and Himawari-8

Abstract
1. Introduction
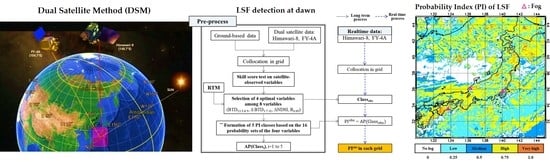
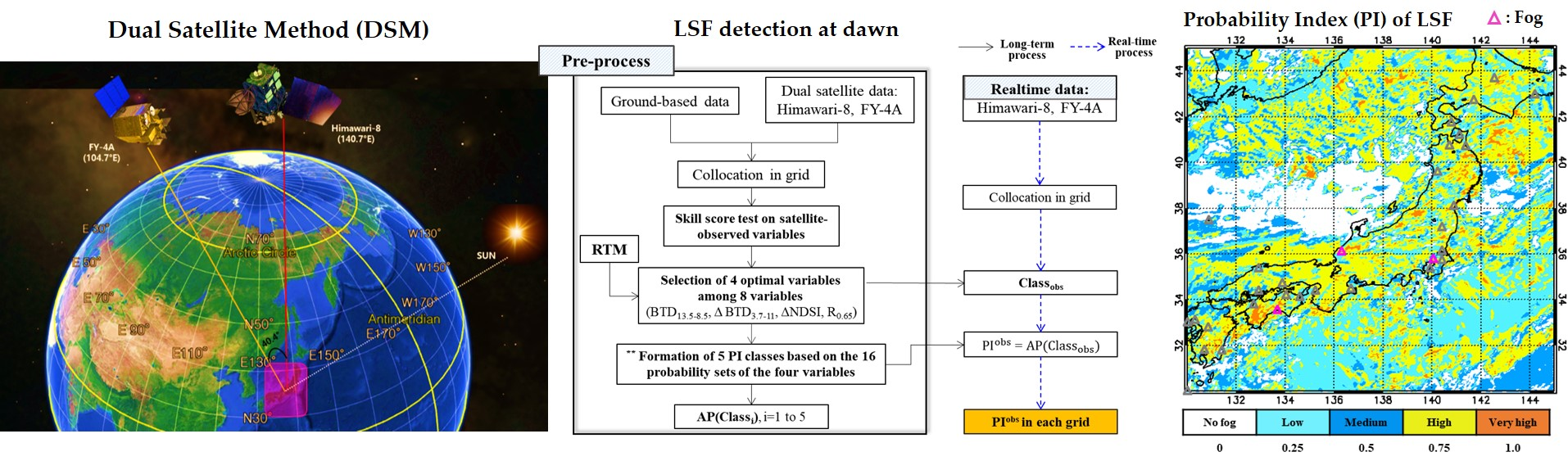
2. Materials and Methods
2.1. Satellite Observations
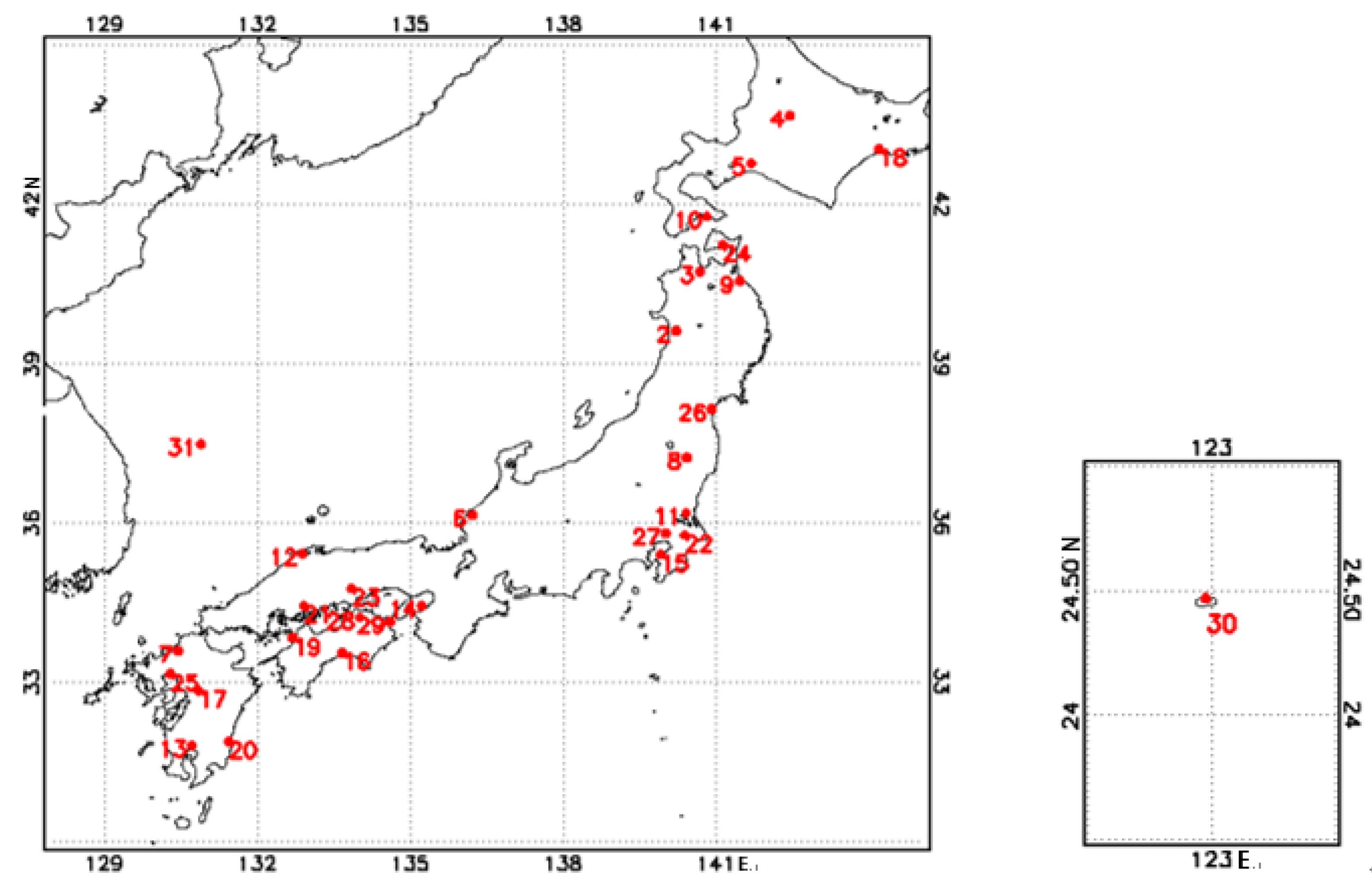
2.2. Ground Observations
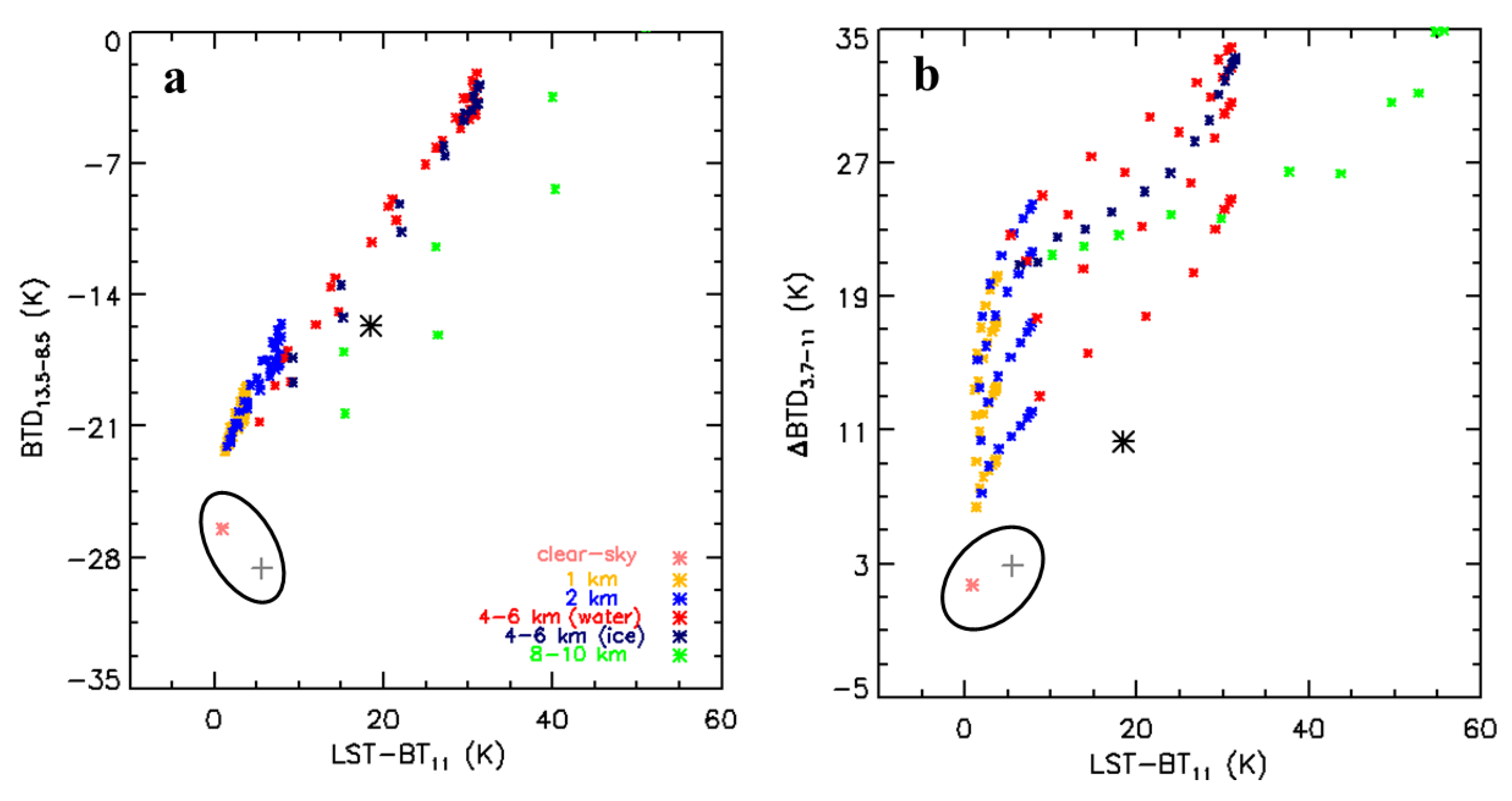
2.3. Radiative Transfer Model
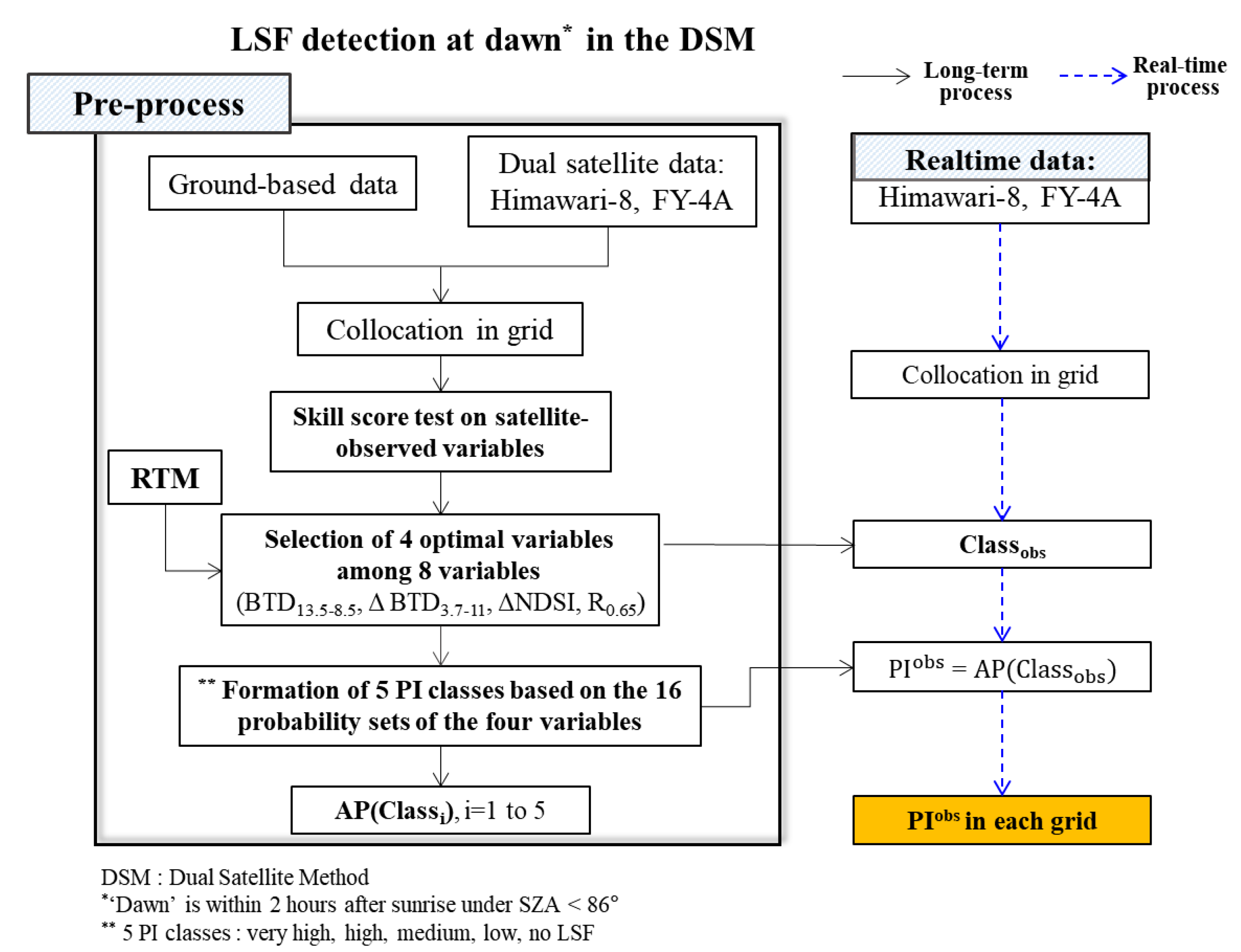
2.4. Formulation of Probability Index (PI)
3. Results
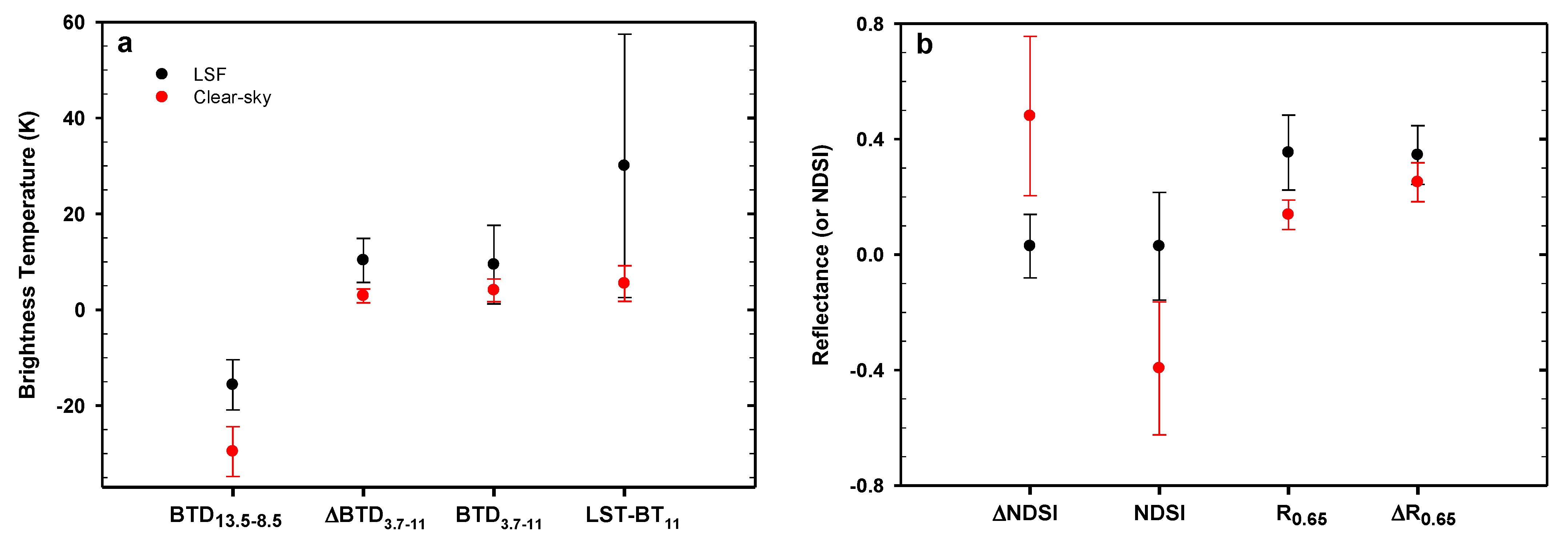
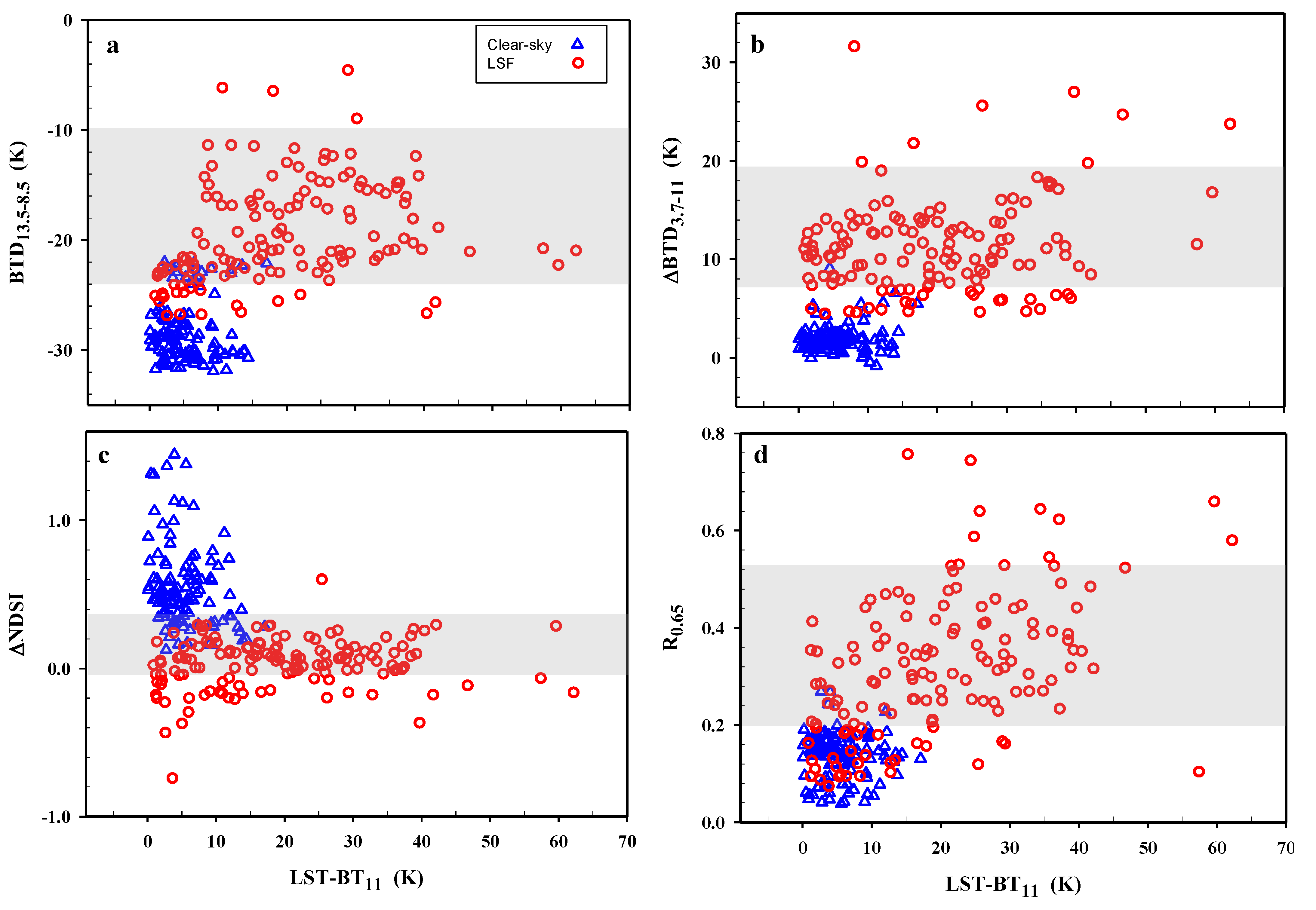
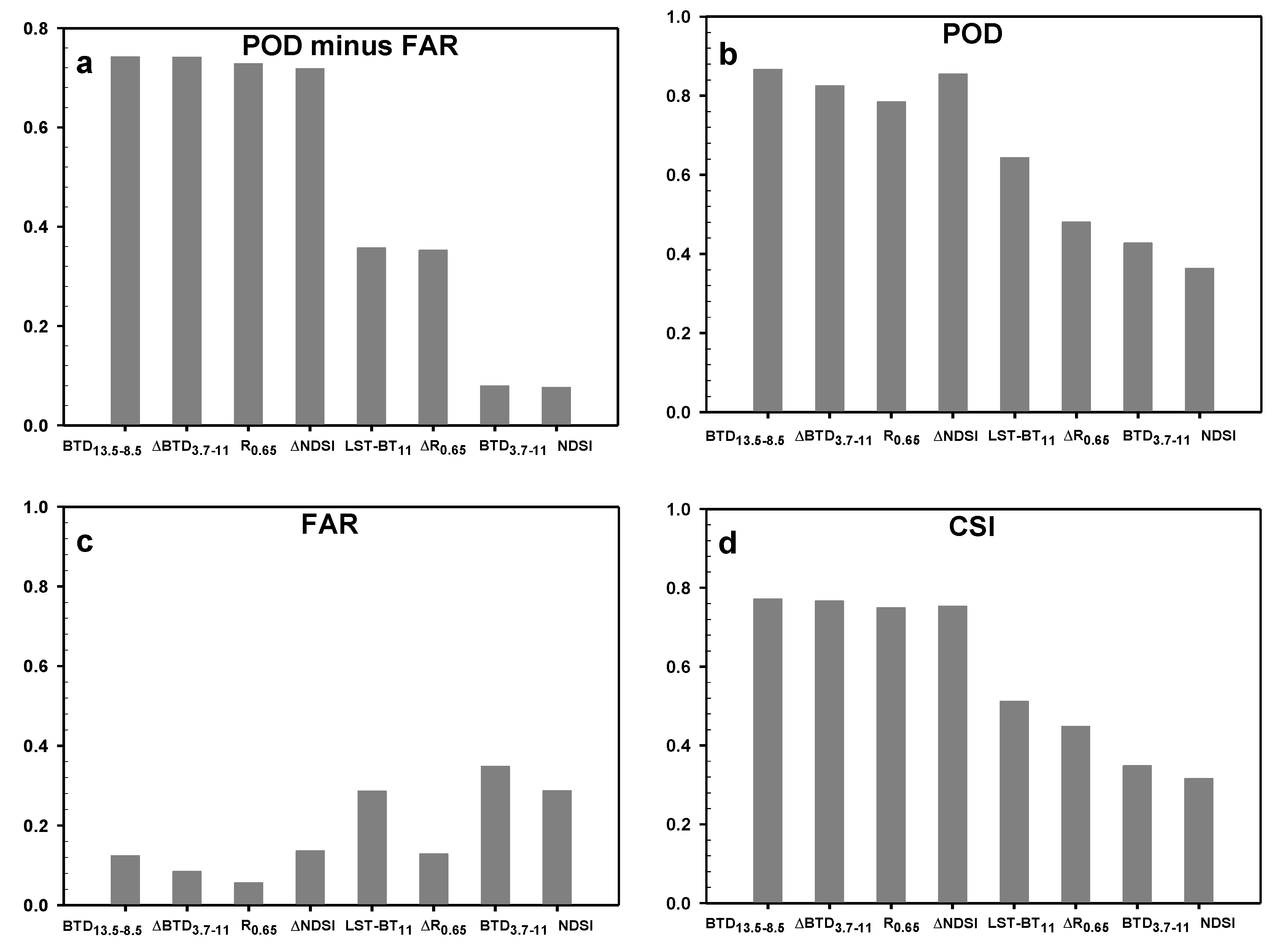
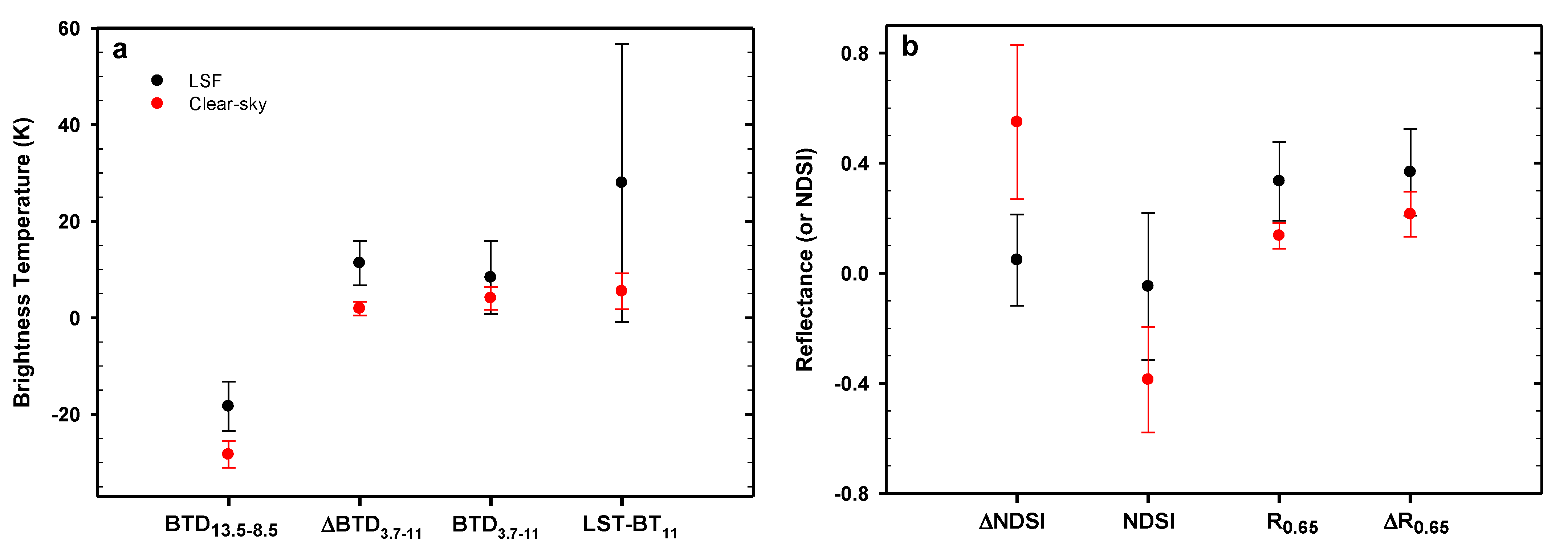
3.1. OptimalLSF Thresholds from the 2018 Control Data
3.2. Verification of Satellite-Observed Thresholds during the Experimental Period of 2019
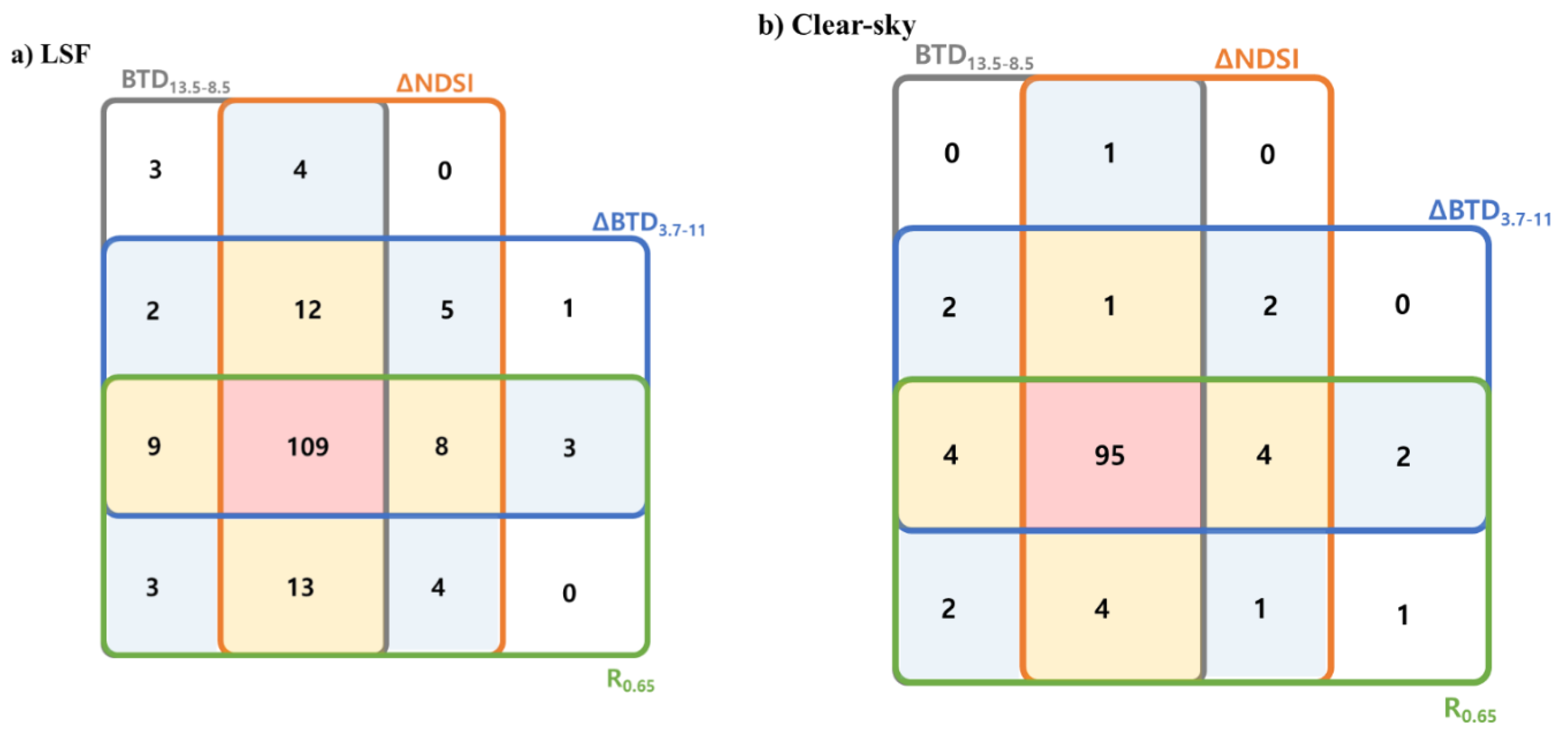
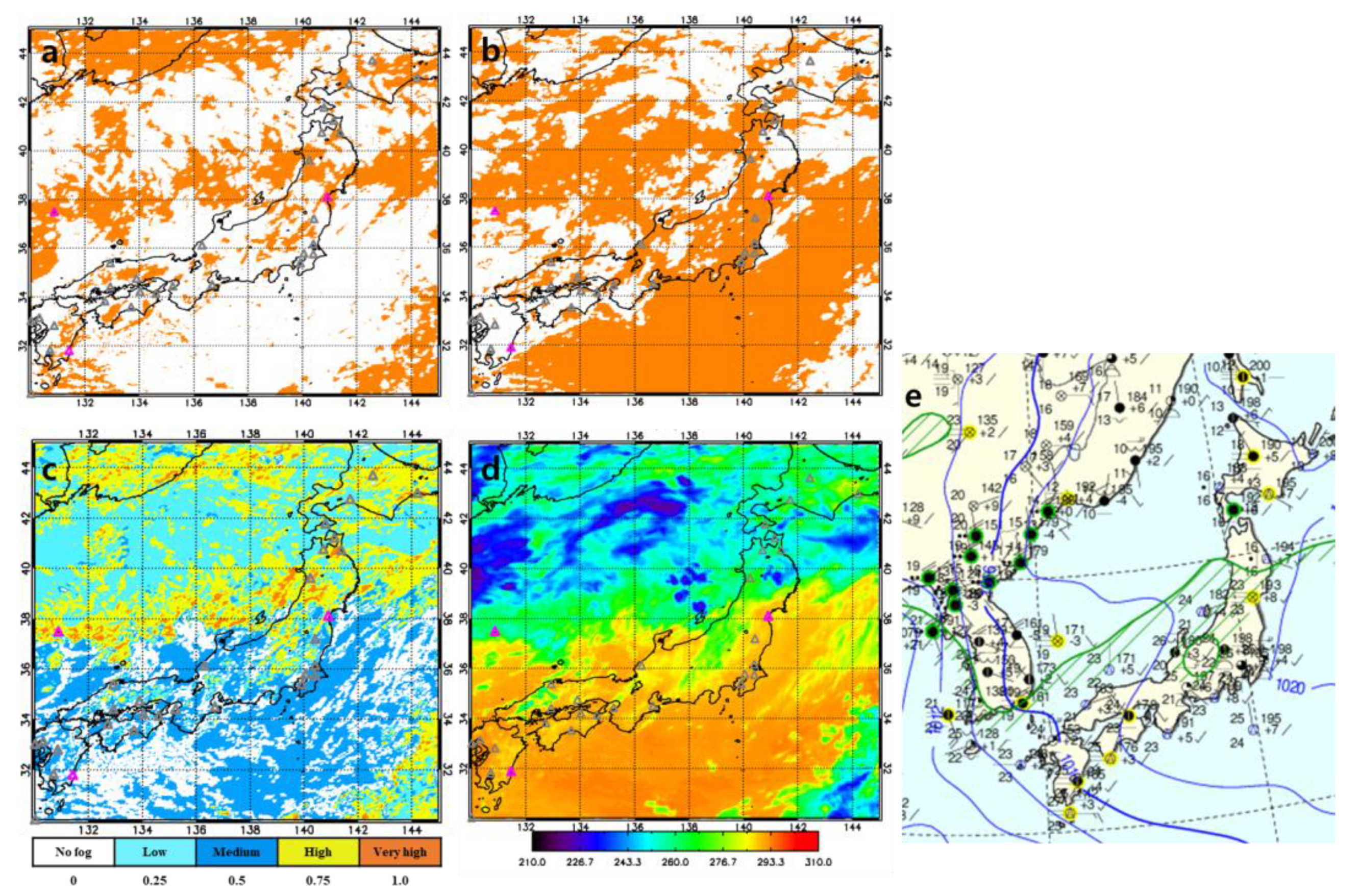
3.3. PI development and Case Study
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronyms | Original Words (or Details) | Acronyms | Original Words (or Details) |
|---|---|---|---|
| AGRI | Advanced Geostationary Radiation Imager | GK2A | GEO-KOMPSAT-2A |
| AHI | Advanced Himawari Imager | GOCI | Geostationary Ocean Color Imager |
| AP | assigned probability | HR | hit rate |
| ASOS | automated surface observing system | HSS | PI estimated from satellite-observed scene |
| AVHRR | Advanced Very High-Resolution Radiometer | IR | infrared |
| AWS | automatic weather station | KMA | Korea Meteorological Administration |
| BRDF | bidirectional reflectance function | LSF | low stratus and fog |
| BT11 | brightness temperature at ~11 µm | LUT | look-up table |
| BT3.7 | brightness temperature at ~3.7 µm | METAR | METeorological Aerodrome Report |
| BTD13.5-8.5 | difference between BT13.5 and BT8.5 | MODIS | Moderate Resolution Imaging Spectroradiometer |
| BTD3.7-11 | difference between BT3.7 and BT11 | NDSI | normalized difference snow index |
| CAVOK | Ceiling (or clouds) And Visibility OK | PC | percentage correct |
| CH | cloud height | PI | probability index |
| COMS | Korean Communication, Ocean, and Meteorological Satellite | POD | probability of detection |
| COT | cloud optical thickness | R0.65 | reflectance at ~0.65 µm |
| CSI | global telecommunications system | RAA | relative azimuth angle |
| DSM | dual satellite method | RTM | radiative transfer model |
| ER | effective radius | SIRS-B | Satellite Infrared Spectrometer |
| FAR | false alarm ratio | SRF | spectral response function |
| FG | fog | SYNOP | surface synoptic observations |
| FH | fog height | SZA | solar zenith angle |
| FOT | fog optical thickness | THLOWER | lower threshold |
| FY-2D | Chinese FengYun-2D | THUPPER | upper threshold |
| FY-4A | Chinese FengYun-4A | VIS | visible |
| GEO | geostationary-orbit satellite | VZA | satellite viewing zenith angle |
| Input variable | Contents |
| atmospheric profile | Mid-latitude summer, US62 |
| wavelength (λ):three channels of VIS, SWIR, & IR1 for COMS & FY-2D | 0.55–0.90, 3.5–4.0, 10.3–11.3 |
| solar zenith angle (SZA) | 0 at 10 intervals, and 85 |
| surface type | Ocean, Vegetation |
| fog height (FH) | Water fog at 0–1 km or 0–2 km |
| upper cloud height (CH) above the fog layer | Water/ice cloud (4–6 km), Ice cloud (8–10 km) |
| fog optical thickness (FOT) | 0, 0.5, 1, 2, 4, 8, 16, 32, 64 |
| cloud optical thickness (COT) | 0, 4, 8, 16, 32 |
| effective radius of fog (FER) | 4, 8, 16, 32 |
| effective radius of cloud (CER) | 2, 4, 8, 16 |
| flux computation stream | 32 |
| vertical resolution | 1 km |
| viewing zenith angle (VZA) | 0 at 10 intervals |
| relative azimuth angle (RAA) | 0 at 30 intervals |
| boundary layer aerosol type | Urban |
| vertical optical depth of boundary layer aerosolsnominally at 0.55 μm | 0.2 |
| SYNOP | |||
|---|---|---|---|
| LSF | Clear sky | ||
| Satellite observation | LSF | a | b |
| Clear sky | c | d | |
| POD = CSI = FAR = HSS = PC = POD-FAR = | |||
References
- Kim, W.; Yum, S.S.; Kim, C.K. Numerical simulation of sea fog over the Yellow Sea: Comparison between UM + PAFOG and WRF + PAFOG coupled systems. Asia -Pac. J. Atmos. Sci. 2020, 56, 89–105. [Google Scholar] [CrossRef]
- Izett, J.G.; van de Wiel, B.J.H. Why does fog deepen? An analytical perspective. Atmosphere 2020, 11, 865. [Google Scholar] [CrossRef]
- Niu, S.; Lu, C.; Yu, H. Fog research in China: An overview. Adv. Atmos. Sci. 2010, 27, 639–662. [Google Scholar] [CrossRef]
- Zhang, G.; Bian, L.; Wang, J.; Yang, Y.; Yao, W.; Xu, W. Boundary layer structure of fog occurred in Beijing and its surrounding areas. Sci. China (D) 2005, 35 (Suppl. I), 73–83. (In Chinese) [Google Scholar]
- Wan, J.H.; Jiang, L.; Xiao, Y.F.; Sheng, H. Sea fog detection based on dynamic threshold algorithm at dawn and dusk time. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-3/W9, 159–163. [Google Scholar] [CrossRef]
- Liu, P.; Tang, M.; Yu, H.; Zhang, Y. Influence of arctic oscillation on frequency of wintertime fog days in eastern China. Atmosphere 2020, 11, 162. [Google Scholar] [CrossRef]
- Yu, H.; Li, T.; Liu, P. Influence of ENSO on frequency of wintertime fog days in eastern China. Clim. Dyn. 2019, 52, 5099–5113. [Google Scholar] [CrossRef]
- Hu, Z.Z.; Kumar, A.; Jha, B. How much of monthly mean precipitation variability over global land is associated with SST anomalies? Clim. Dyn. 2020, 54, 701–712. [Google Scholar] [CrossRef]
- Yoo, J.M.; Choo, G.H.; Lee, K.H.; Wu, D.L.; Yang, J.H.; Park, J.D.; Choi, Y.S.; Shin, D.B.; Jeong, J.H.; Yoo, J.M. Improved detection of low stratus and fog at dawn from dual geostationary (COMS and FY-2D) satellites. Remote Sen. Environ. 2018, 211, 292–306. [Google Scholar] [CrossRef]
- Egli, S.; Thies, B.; Bendix, J. A hybrid approach for fog retrieval based on a combination of satellite and ground truth data. Remote Sens. 2018, 10, 628. [Google Scholar] [CrossRef]
- Cermak, J.; Bendix, J. A novel approach to fog/low stratus detection using Meteosat 8 data. Atmos. Res. 2008, 87, 279–292. [Google Scholar] [CrossRef]
- Zhang, S.; Yi, L. A comprehensive dynamic threshold algorithm for daytime sea fog retrieval over the Chinese adjacent seas. Pure Appl. Geophys. 2013, 170, 1931–1944. [Google Scholar] [CrossRef]
- Bendix, J.; Thies, B.; Cermak, J.; Nauss, T. Ground fog detection from space based on MODIS daytime data-a feasibility study. Weather Forecast. 2005, 20, 989–1005. [Google Scholar] [CrossRef]
- Cermak, J. SOFOS-A New Satellite-Based Operational Fog Observation Scheme. Ph.D. Thesis, Philipps-University, Marburg, Germany, 2006. [Google Scholar]
- Heo, K.Y.; Park, S.; Ha, J.J.; Shim, J.S. Algorithm for sea fog monitoring with the use of information technologies. Meteorol. Appl. 2012. [Google Scholar] [CrossRef]
- Müller, M.D.; Masbou, M.; Bott, A.; Janjic, Z. Fog Prediction in a 3D Model with Parametrized Microphysics, Proc. Symp. on Nowcasting and Very Short Range Forecasting; World Weather Research Programme: Toulouse, France; Available online: http://www.meteo.fr/cic/wsn05/DVD/index.html (accessed on 26 June 2005).
- Maronga, B.; Bosveld, F.C. Key parameters for the life cycle of nocturnal radiation fog: A comprehensive large-eddy simulation study. Q. J. R. Meteorol. Soc. 2017, 143, 2463–2480. [Google Scholar] [CrossRef]
- Bendix, J.A. satellite-based climatology of fog and low-level stratus in Germany and adjacent areas. Tmos. Res. 2002, 64, 3–18. [Google Scholar] [CrossRef]
- Jedlovec, G. Automated Detection of Clouds in Satellite Imagery. In Advances in Geoscience and Remote Sensing; Jedlovec, G., Ed.; Intech: Rijeka, Croatia, 2009. [Google Scholar]
- Eyre, J.R.; Brownscombe, J.L.; Allam, R.J. Detection of fog at night using Advanced Very High Resolution Radiometer (AVHRR) imagery. Meteorol. Mag. 1984, 113, 266–271. [Google Scholar]
- Ellord, G.P. Advances in the detection and analysis of fog at night using GOES multispectral infrared imagery. Weather Forecast. 1995, 10, 606–619. [Google Scholar] [CrossRef]
- Cermak, J.; Bendix, J. Dynamical nighttime fog/low stratus detection based on Meteosat SEVIRI data: A feasibility study. Pure Appl. Geophys. 2007, 164, 1179–1192. [Google Scholar] [CrossRef]
- Gao, S.; Wu, W.; Zhu, L.; Fu, G.; Huang, B. Detection of nighttime sea fog/stratus over the Huang-Hai sea using MTSAT-1R IR data. Acta Oceanol. Sin. 2009, 28, 23–35. [Google Scholar]
- Chaurasia, S.; Gohil, B.S. Detection of day time fog over India using INSAT-3D data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4524–4530. [Google Scholar] [CrossRef]
- Kim, S.H.; Suh, M.S.; Han, J.H. Development of fog detection algorithm during nighttime using Himawari-8/AHI satellite and ground observation data. Asia -Pac. J. Atmos. Sci. 2018. [Google Scholar] [CrossRef]
- Shin, D.; Kim, J.H. A new application of unsupervised learning to nighttime sea fog detection. Asia -Pac. J. Atmos. Sci. 2018, 54, 527–544. [Google Scholar] [CrossRef] [PubMed]
- Han, J.-H.; Suh, M.-S.; Yu, H.-Y.; Roh, N.-Y. Development of fog detection algorithm using GK2A/AMI and ground data. Remote Sens. 2020, 12, 3181. [Google Scholar] [CrossRef]
- Bendix, J.; Thies, B.; Nauß, T.; Cermak, J. A feasibility study of daytime fog and low stratus detection with TERRA/AQUA-MODIS over land. Meteorol. Appl. 2006, 13, 111–125. [Google Scholar] [CrossRef]
- Kim, D.; Park, M.S.; Park, Y.J.; Kim, W. Geostationary Ocean Color Imager (GOCI) marine fog detection in combination with Himawari-8 based on the decision tree. Remote Sens. 2020, 12, 149. [Google Scholar] [CrossRef]
- Wang, J.L.; Li, S.M.; Liu, X.L.; Wu, X.J. An analysis of the fog distribution in Beijing for the 2001–2005 period using NOAA and FY data. Atmos. Res. 2010, 96, 575–589. [Google Scholar] [CrossRef]
- Drönner, J.; Korfhage, N.; Egli, S.; Mühling, M.; Thies, B.; Bendix, J.; Freisleben, B.; Seeger, B. Fast cloud segmentation using convolutional neural networks. Remote Sens. 2018, 10, 1782. [Google Scholar] [CrossRef]
- Andersen, H.; Cermak, J. First fully diurnal fog and low cloud satellite detection reveals life cycle in the Namib. Atmos. Meas. Tech. 2018, 11, 5461–5470. [Google Scholar] [CrossRef]
- Schreiner, A.J.; Ackerman, S.A.; Baum, B.A.; Heidinger, A.K. A multispectral technique for detecting low-level cloudiness near sunrise. J. Atmos. Ocean. Technol. 2007, 24, 1800–1810. [Google Scholar] [CrossRef]
- Lee, J.; Chung, C.; Ou, M. Fog detection using geostationary satellite data: Temporally continuous algorithm. Asia-Pac. J. Atmos. Sci. 2011, 47, 113–122. [Google Scholar] [CrossRef]
- Schillings, C.; Mannstein, H.; Meyer, R. Operational method for deriving high resolution direct normal irradiance from satellite data. Solar Energy. 2004, 76, 475–484. [Google Scholar] [CrossRef]
- Yang, J.H.; Yoo, J.M.; Choi, Y.S.; Wu, D.; Jeong, J.H. Probability index of low stratus and fog at dawn using dual geostationary satellite observations from COMS and FY-2D near the Korean Peninsula. Remote Sens. 2019, 11, 1283. [Google Scholar] [CrossRef]
- Jensen, J.R. Remote Sensing of the Environment: An Earth Resource Perspective, 2nd ed.; Prentice Hall, Brigham Young University: Upper Saddle River, NJ, USA, 2000; pp. 150–151. [Google Scholar]
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the new generation of Chinese geostationary weather satellites, Fengyun-4. Bull. Am. Meteorol. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- Zhu, J.; Shu, J.; Guo, W. Biases characteristics assessment of the Advanced Geosynchronous Radiation Imager (AGRI) measurement on board Fengyun–4A Geostationary Satellite. Remote Sens. 2020, 12, 2871. [Google Scholar] [CrossRef]
- Kazumori, M. Assimilation of Himawari-8 clear sky radiance data in JMA’s global and mesoscale NWP systems. J. Meteorol. Soc. Jpn. 2018, 96B, 173–192. [Google Scholar] [CrossRef]
- Akimoto, Y.; Kusaka, H. A climatological study of fog in Japan based on event data. Atmos. Res. 2015. [Google Scholar] [CrossRef]
- Smith, W.L.; Woolf, H.M.; Fleming, H.E. Retrieval of atmospheric temperature profiles from satellite measurements for dynamical forecasting. J. Appl. Meteorol. Climatol. 1972, 11, 113–122. Available online: https://journals.ametsoc.org/view/journals/apme/11/1/1520-0450_1972_011_0113_roatpf_2_0_co_2.xml (accessed on 12 September 2020). [CrossRef]
- Dozier, J. Spectral signature of alpine snow cover from the Landsat thematic mapper. Remote Sens. Environ. 1989, 28, 9–22. [Google Scholar] [CrossRef]
- Kulkarni, A.V.; Singh, S.K.; Mathur, P.; Mishra, V.D. Algorithm to monitor snow cover using AWiFS data of RESOURCESAT-1 for the Himalayan region. Int. J. Remote Sens. 2006, 27, 2449–2457. [Google Scholar] [CrossRef]
- Wu, W.; Li, S. Automatic sea fog detection over Chinese adjacent oceans using Terra/MODIS data. Int. J. Remote Sens. 2014, 35, 7430–7457. [Google Scholar] [CrossRef]
- Ryu, H.S.; Hong, S. Sea Fog Detection Based on Normalized Difference Snow Index Using Advanced Himawari Imager Observations. Remote Sens. 2020, 12, 1521. [Google Scholar] [CrossRef]
- Wylie, D.P.; Menzel, W.P. Eight years of global high cloud statistics using HIRS. J. Clim. 1999, 12, 170–184. [Google Scholar] [CrossRef]
- Li, J.; Schmidt, C.C.; Nelson, J.P., III; Schmit, T.J.; Menzel, W.P. Estimation of total atmospheric ozone from GOES sounder radiances with high temporal resolution. J. Atmos. Ocean. Technol. 2001, 18, 157–168. [Google Scholar] [CrossRef]
- UK Met Office. Aerodrome Weather Report–World Meteorological Organization Archived 2012-02-24 at the Wayback Machine. 2012. Available online: https://web.archive.org/web/20120518165852/http://www.metoffice.gov.uk/media/pdf/4/1/Get_Met_2012_amends_tag_Artwork.pdf (accessed on 20 June 2019).
- Wetzel, M.A.; Borys, R.D.; Xu, L.E. Satellite microphysical retrievals for land-based fog with validation by balloon profiling. J. Appl. Meteor. 1996, 35, 810–829. [Google Scholar] [CrossRef][Green Version]
- Ricchiazzi, P.; Yang, S.; Gautier, C.; Sowle, D. SBDART: A research and teaching software tool for plane-parallel radiative transfer in the Earth’s atmosphere. Bull. Am. Meteorol. Soc. 1998, 79, 2101–2114. [Google Scholar] [CrossRef]
- Egli, S.; Thies, B.; Dronner, J.; Cermak, J.; Bendix, J. A 10 year fog and low stratus climatology for Europe based on Meteosat Second Generation data. Q. J. R. Meteorol. Soc. 2016, 143, 530–541. [Google Scholar] [CrossRef]
- Prabhakara, C.; Kratz, D.P.; Yoo, J.M.; Dalu, G.; Verneka, A. Optically thin cirrus clouds: Radiative impact on the warm pool. Quant. Spectrosc. Radiat. Transfer. 1993, 49, 467–483. [Google Scholar] [CrossRef]
- Chung, S.R.; Ahn, M.H.; Han, K.S.; Lee, K.T.; Shin, D.B. Meteorological products of Geo-KOMPSAT 2A (GK2A) satellite. Asia-Pac. J. Atmos. Sci. 2020, 56, 185. [Google Scholar] [CrossRef]
- Marchant, B.; Platnick, S.; Meyer, K.; Wind, G. Evaluation of the MODIS collection 6 multilayer cloud detection algorithm through comparisons with CloudSat Cloud Profiling Radar and CALIPSO CALIOP products. Atmos. Meas. Tech. 2020, 13, 3263–3275. [Google Scholar] [CrossRef]
- Teng, S.; Liu, C.; Zhang, Z.; Wang, Y.; Sohn, B.J.; Yung, Y.L. Retrieval of ice-over-water cloud microphysical and optical properties using passive radiometers. Geophys. Res. Lett. 2020, 47, e2020GL088941. [Google Scholar] [CrossRef]












| Satellite (Nation, Lon at nadir) | |||||||
|---|---|---|---|---|---|---|---|
| Himawari-8 (Japan, 140.7 °E) | FY-4A (China, 104.7 °E) | ||||||
| Channel (Abbreviation) | Application of this Study | Wavelength (μm) | Central Wavelength (μm) | Resolution at Nadir (km) | Wavelength (μm) | Central Wavelength (μm) | Resolution at Nadir (km) |
| VIS (R0.65) | Fog, cloud | 0.63–0.66 | 0.64 | 0.5 | 0.55–0.75 | 0.65 | 0.5–1 |
| NIR (R1.6) | Cloud, snow | 1.60–1.62 | 1.61 | 2 | 1.58–1.64 | 1.61 | 2 |
| SWIR (BT3.7) | Fog, cloud | 3.74–3.96 | 3.89 | 2 | 3.50–4.00 | 3.75 | 2 |
| MIR (BT8.5) | Cloud-top phase, SST, LST | 8.44–8.76 | 8.59 | 2 | 8.00–9.00 | 8.50 | 4 |
| LWIR1 (BT11) | SST, LST, cloud-top temperature | 11.1–11.3 | 11.24 | 2 | 10.3–11.3 | 10.80 | 4 |
| LWIR3 (BT13.5) | Cloud, air temperature | 13.2–13.4 | 13.28 | 2 | 13.2–13.8 | 13.50 | 4 |
| Station Number | Station in Japan | Lat (°N) | Lon (°E) | Height (m) | Station Number | Station in Japan | Lat (°N) | Lon (°E) | Height (m) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | AKENO (JASDF) | 34.53 | 136.67 | 9 | 17 | KUMAMOTO (CIV/JAS) | 32.84 | 130.86 | 196 |
| 2 | AKITA AIRPORT | 39.62 | 140.22 | 96 | 18 | KUSHIRO AIRPORT | 43.04 | 144.19 | 98 |
| 3 | AOMORI AIRPORT | 40.73 | 140.69 | 201 | 19 | MATSUYAMA AIRPORT | 33.83 | 132.70 | 7 |
| 4 | ASAHIKAWA AIRPORT | 43.67 | 142.45 | 211 | 20 | MIYAZAKI AIRPORT | 31.88 | 131.45 | 9 |
| 5 | CHITOSE | 42.77 | 141.69 | 30 | 21 | NEW HIROSHIMA | 34.44 | 132.92 | 6 |
| 6 | FUKUI AIRPORT | 36.14 | 136.22 | 8 | 22 | NEW TOKYO INTL AIRPORT | 35.77 | 140.39 | 44 |
| 7 | FUKUOKA/ ITAZUKE | 33.58 | 130.45 | 12 | 23 | OKAYAMA AIRPORT | 34.76 | 133.86 | 242 |
| 8 | FUKUSHIMA ARPT | 37.23 | 140.43 | 375 | 24 | OMINATO (JASDF) | 41.23 | 141.13 | 10 |
| 9 | HACHINOHE (JMSDF) | 40.55 | 141.47 | 49 | 25 | SAGA AIRPORT | 33.15 | 130.30 | 5 |
| 10 | HAKODATE AIRPORT | 41.77 | 140.82 | 36 | 26 | SENDAI AIRPORT | 38.14 | 140.92 | 5 |
| 11 | HYAKURI (JASDF) | 36.18 | 140.41 | 35 | 27 | SHIMOFUSA (JMSDF | 35.80 | 140.01 | 33 |
| 12 | IZUMO AIRPORT | 35.41 | 132.89 | 5 | 28 | TAKAMATSU AIRPORT | 34.22 | 134.02 | 188 |
| 13 | KAGOSHIMA AIRPORT | 31.80 | 130.72 | 275 | 29 | TOKUSHIMA(JMSDF) | 34.13 | 134.61 | 11 |
| 15 | KANSAI INTL | 34.43 | 135.23 | 8 | 30 | Yonaguni | 24.47 | 122.98 | 19 |
| 15 | KISARAZU (JGSDF) | 35.40 | 139.91 | 6 | Island station in South Korea | ||||
| 16 | KOCHI AIRPORT | 33.55 | 133.67 | 10 | 31 | Ulleung | 37.48 | 130.90 | 223 |
| Satellite-Derived Threshold | Skill Score | |||||
|---|---|---|---|---|---|---|
| POD | CSI | HSS | PC | FAR | POD-FAR | |
| −24 K < BTD13.5-8.5 < −10 K | 0.881 | 0.833 | 0.785 | 0.895 | 0.061 | 0.820 |
| −0.1 < ΔNDSI < 0.3 | 0.881 | 0.829 | 0.778 | 0.892 | 0.066 | 0.815 |
| 0.19 < R0.65 < 0.52 | 0.847 | 0.819 | 0.774 | 0.888 | 0.039 | 0.808 |
| 7 K < ΔBTD3.7-11 < 19 K | 0.847 | 0.805 | 0.753 | 0.878 | 0.057 | 0.790 |
| 4.5 K < LST-BT11 < 37.5 K | 0.699 | 0.575 | 0.372 | 0.692 | 0.236 | 0.463 |
| 0.29 < ΔR0.65 < 0.55 | 0.460 | 0.436 | 0.337 | 0.644 | 0.110 | 0.350 |
| 3 K < BTD3.7-11 < 15 K | 0.466 | 0.391 | 0.167 | 0.566 | 0.293 | 0.173 |
| −0.18 < NDSI < 0.20 | 0.330 | 0.309 | 0.200 | 0.559 | 0.171 | 0.159 |
| Assigned Probability for 16 Cases | LSF Class (Possibility of Occurrence) | ||||
|---|---|---|---|---|---|
| 1 (Very High) | 2 (High) | 3 (Medium) | 4 (Low) | 5 (None) | |
| 1 | P | ||||
| 0.75 | P | ||||
| 0.75 | P | ||||
| 0.75 | P | ||||
| 0.75 | P | ||||
| 0.5 | P | ||||
| 0.5 | P | ||||
| 0.5 | P | ||||
| 0.5 | P | ||||
| 0.5 | P | ||||
| 0.5 | P | ||||
| 0.25 | P | ||||
| 0.25 | P | ||||
| 0.25 | P | ||||
| 0.25 | P | ||||
| 0 | P | ||||
| Details | DSM Study | ||
|---|---|---|---|
| Yoo et al. (2018) [9] | Yang et al. (2019) [36] | This Study | |
| Geostationary satellites (Number of channels) | COMS (6) and FY-2D (6) | COMS (6) and FY-2D (6) | Himawari-8 (16) and FY-4A (14) |
| Main research area | South Korea | South Korea | Japan |
| Spatial grid resolution | ~4 km | ~4 km | ~4 km |
| Satellite viewing zenith angle (VZA) difference at nadir | 46.5° | 46.5° | 40.4° |
| Period | 2013–2016 | 2013–2016 | 2018–2019 |
| Season | June to August | April to August | March to November |
| DSM variable | ΔR0.67 | ΔR0.67 and ΔBTD3.7-11 | ΔBTD3.7-11 and ΔNDSI |
| Additional variable | Suggests R0.67 | R0.67 | BTD13.5-8.5 and R0.65 |
| Probability index of LSF | No | Yes | Yes |
| Number of variables for PI calculation | None | Three | Four |
| Number of LSF occurrence classes | 3 or 4 | 8 | 5 extensible to 16 * |
| LSF Class | Assigned Probability | Thlower < LSF < Thupper | Either Clear Sky < Thlower or Clear Sky > Thupper | ||
|---|---|---|---|---|---|
| Number of Actual Occurrences | Sum of Detection Probability | Number of Actual Occurrences | Sum of Detection Probability | ||
| 1 | 1 | 99 | 99.00 | 79 | 79.00 |
| 2 | 0.75 | 43 | 32.25 | 8 | 6.00 |
| 3 | 0.5 | 21 | 10.50 | 12 | 6.00 |
| 4 | 0.25 | 2 | 0.50 | 11 | 2.75 |
| 5 | 0 | 6 | 0.00 | 0 | 0.00 |
| Total | 171 | 140.25 | 110 | 93.75 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.-H.; Yoo, J.-M.; Choi, Y.-S. Advanced Dual-Satellite Method for Detection of Low Stratus and Fog near Japan at Dawn from FY-4A and Himawari-8. Remote Sens. 2021, 13, 1042. https://doi.org/10.3390/rs13051042
Yang J-H, Yoo J-M, Choi Y-S. Advanced Dual-Satellite Method for Detection of Low Stratus and Fog near Japan at Dawn from FY-4A and Himawari-8. Remote Sensing. 2021; 13(5):1042. https://doi.org/10.3390/rs13051042
Chicago/Turabian StyleYang, Jung-Hyun, Jung-Moon Yoo, and Yong-Sang Choi. 2021. "Advanced Dual-Satellite Method for Detection of Low Stratus and Fog near Japan at Dawn from FY-4A and Himawari-8" Remote Sensing 13, no. 5: 1042. https://doi.org/10.3390/rs13051042
APA StyleYang, J.-H., Yoo, J.-M., & Choi, Y.-S. (2021). Advanced Dual-Satellite Method for Detection of Low Stratus and Fog near Japan at Dawn from FY-4A and Himawari-8. Remote Sensing, 13(5), 1042. https://doi.org/10.3390/rs13051042