
The Applicability of LandTrendr to Surface Water Dynamics: A Case Study of Minnesota from 1984 to 2019 Using Google Earth Engine


Abstract
:
1. Introduction
2. Materials and Methods
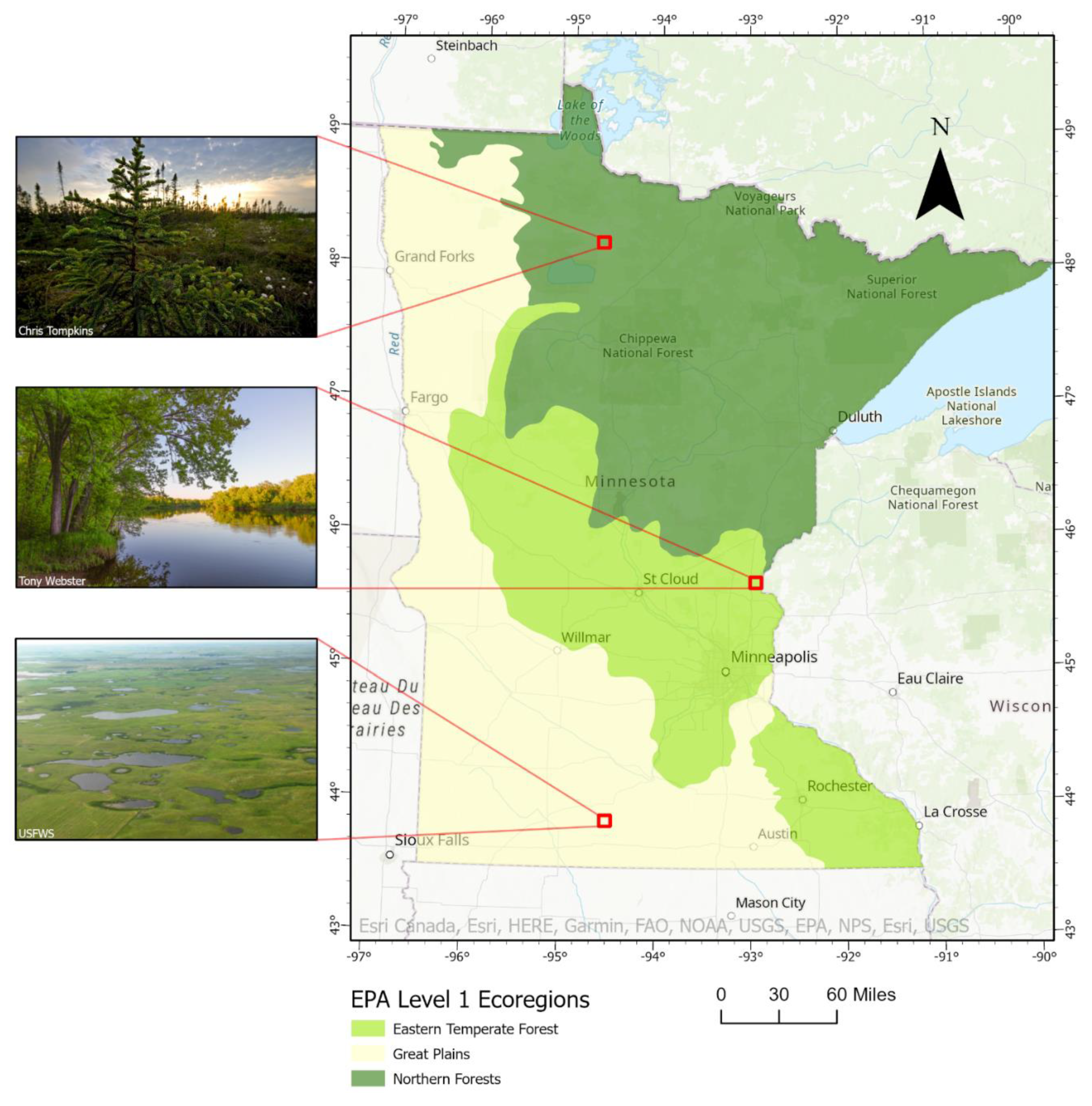
2.1. Study Area
2.2. Satellite Imagery Acquisition and Pre-Processing
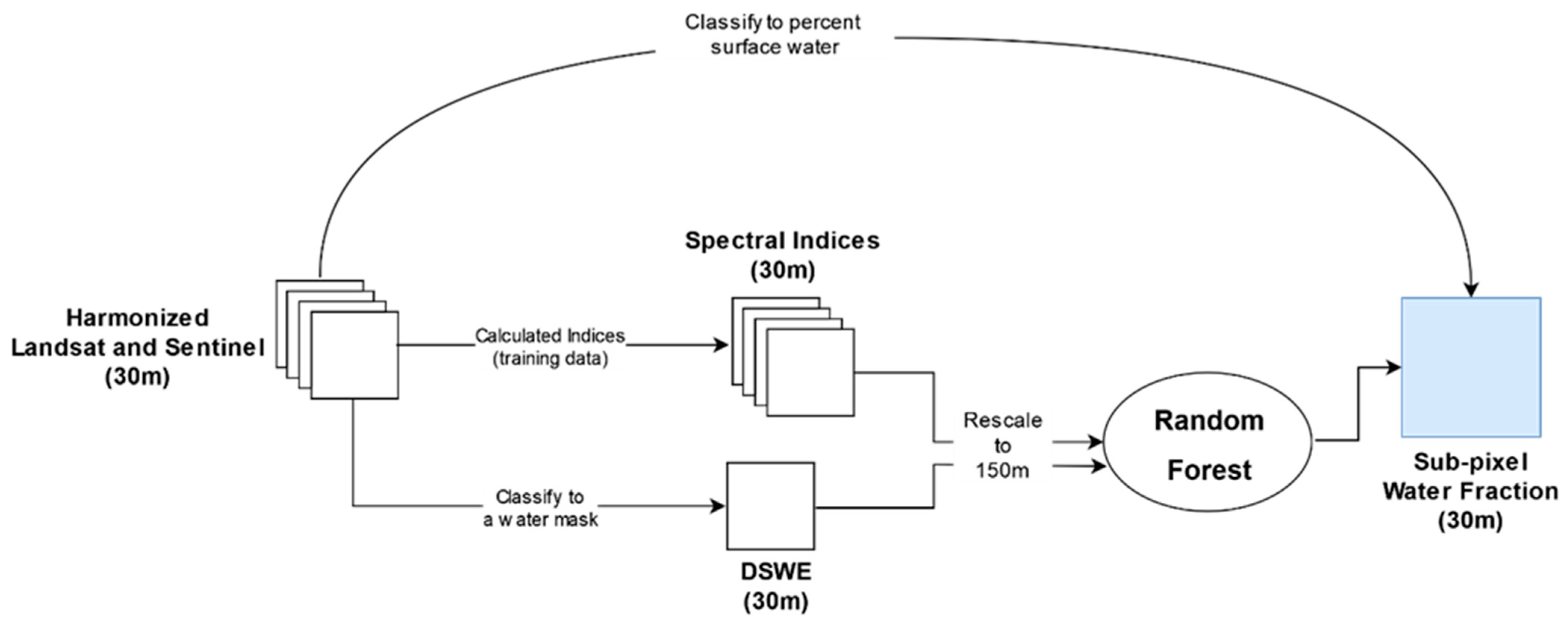
2.3. Creation of the Wetland Time Series

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index: | Formula: | Source: |
|---|---|---|
| Tasseled-cap Greenness | (−0.2941)B1 + (−0.243)B2 + (−0.5424)B3 + 0.7276B4 + 0.0713B5 + (−0.1608)B6 | [50] |
| Tasseled-cap Wetness | 0.1511B1 + 0.1973B2 + 0.3283B3 + 0.3407B4 + (−0.7117)B5 + (−0.4559)B6 | [50] |
| Tasseled-cap Brightness | 0.3029B1 + 0.2786B2 + 0.4733B3 + 0.5599B4 + 0.508B5 + 0.1872B6 | [50] |
| Normalized Difference Wetness Index | (Green − NIR)/(Green + NIR) | [51] |
| Modified Normalized Difference Wetness Index | (Green − SWIR1)/(Green + SWIR1) | [52] |
| Normalized Difference Vegetation Index | (NIR − Red)/(NIR + Red) | [53] |
| Topographic Position Index * | Dem − FocalMean(dem, radius = 30 pixels) | [47] |
| Day of Year * | Julian date within a year |
2.4. Parameterization of LandTrendr
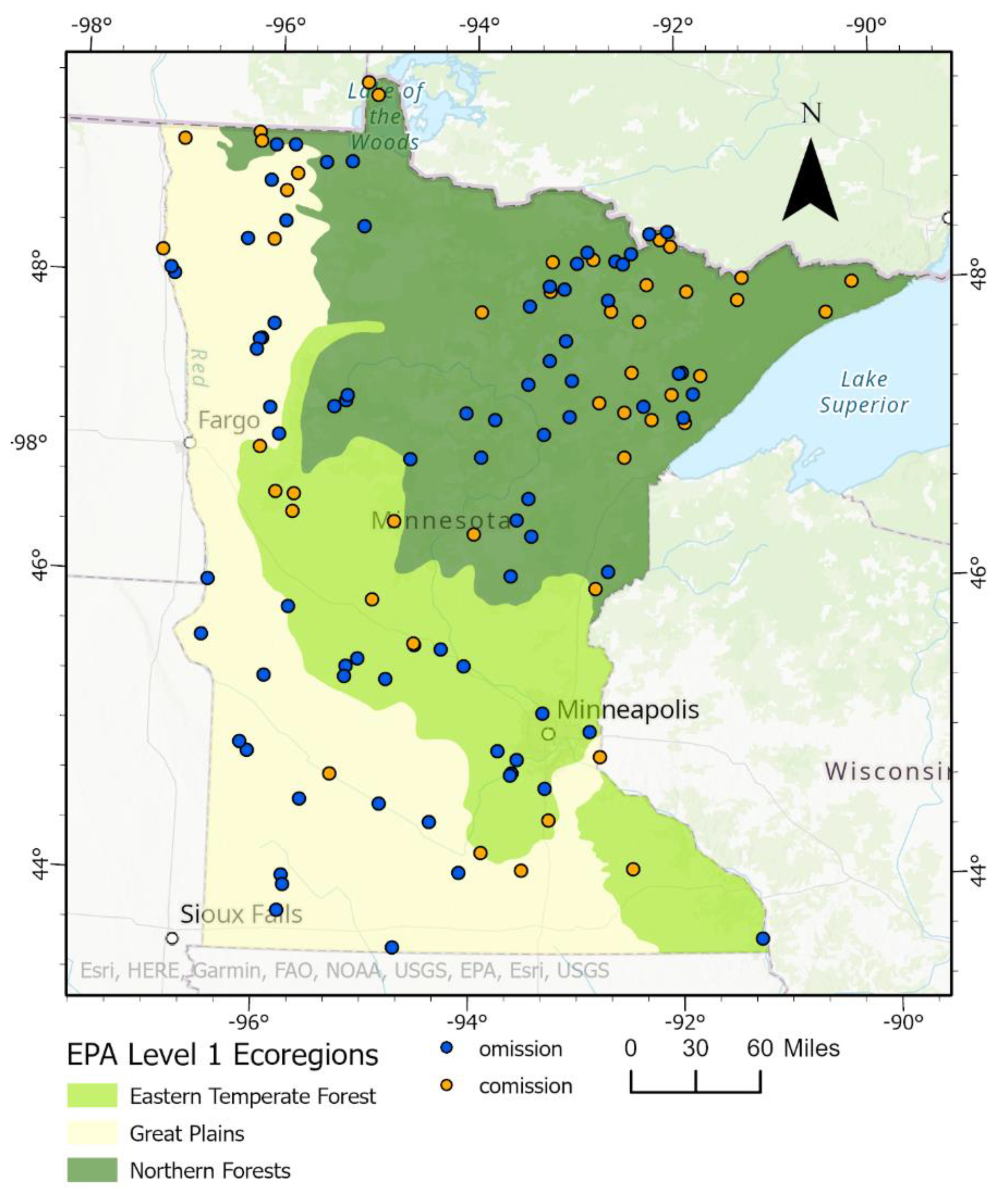
2.5. Quantitative Accuracy Assessment
3. Results
3.1. Quantitive Accuracy
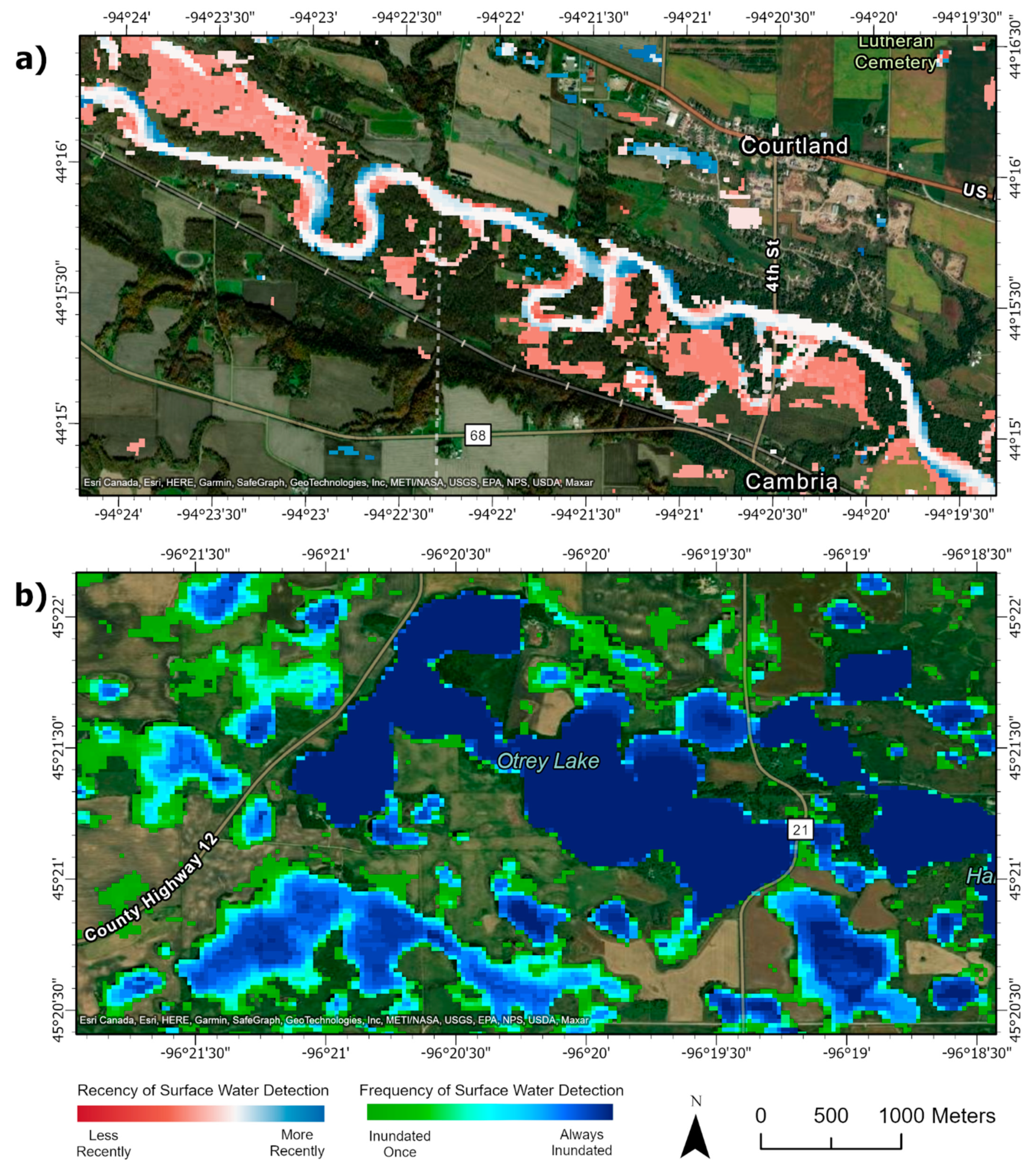
3.2. Qualitative Accuracy
4. Discussion
4.1. Strengths and Limitations
4.2. Potential Applications
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dahl, T.E. Wetlands Losses in the United States 1780′s to 1980′s; US Department of the Interior, Fish and Wildlife Service: Washington, DC, USA, 1990; Volume 13.
- Dahl, T.E. Status and Trends of Wetlands in the Conterminous United States 2004 to 2009; US Department of the Interior, Fish and Wildlife Service: Washington, DC, USA, 2009.
- Dahl, T.E. Status and Trends of Prairie Wetlands in the United States 1997 to 2009; U.S. Department of the Interior, Fish and Wildlife Service, Ecological Services: Washington, DC, USA, 2014.
- Saunders, S.P.; Hall, K.A.L.; Hill, N.; Michel, N.L. Multiscale Effects of Wetland Availability and Matrix Composition on Wetland Breeding Birds in Minnesota, USA. Condor Ornithol. Appl. 2019, 59, 1–15. [Google Scholar] [CrossRef]
- Cheng, F.Y.; Van Meter, K.J.; Byrnes, D.K.; Basu, N.B. Maximizing US Nitrate Removal through Wetland Protection and Restoration. Nature 2020, 588, 625–630. [Google Scholar] [CrossRef] [PubMed]
- Hansen, A.T.; Dolph, C.L.; Foufoula-Georgiou, E.; Finlay, J.C. Contribution of Wetlands to Nitrate Removal at the Watershed Scale. Nat. Geosci. 2018, 11, 127–132. [Google Scholar] [CrossRef]
- Goldberg, N.; Reiss, K.C. Accounting for Wetland Loss: Wetland Mitigation Trends in Northeast Florida 2006–2013. Wetlands 2016, 36, 373–384. [Google Scholar] [CrossRef]
- Fickas, K.C.; Cohen, W.B. Landsat-Based Monitoring of Annual Wetland Change in the Willamette Valley of Oregon, USA from 1972 to 2012. Wetl. Ecol. Manag. 2016, 24, 73–92. [Google Scholar] [CrossRef]
- Bendor, T. Landscape and Urban Planning A Dynamic Analysis of the Wetland Mitigation Process and Its Effects on No Net Loss Policy. Landsc. Urban Plan. 2009, 89, 17–27. [Google Scholar] [CrossRef]
- Kloiber, S.M.; Norris, D.J. Monitoring Changes in Minnesota Wetland Area and Type from 2006 to 2014. Wetl. Sci. Pract. 2017, 34, 76–87. [Google Scholar]
- Green, A.J.; Alcorlo, P.; Morris, E.P. Creating a Safe Operating Space for Wetlands in a Changing Climate. Front. Ecol. Environ. 2017, 15, 99–107. [Google Scholar] [CrossRef] [Green Version]
- Beier, C.; Briske, D.D.; Classen, A.T.; Luo, Y.; Reichstein, M.; Smith, M.D.; Smith, S.D.; Bell, J.E.; Fay, P.A.; Heisler, J.L.; et al. Consequences of More Extreme Precipitation Regimes for Terrestrial Ecosystems. Bioscience 2008, 58, 811–821. [Google Scholar]
- Zhang, Z.; Lei, L.; He, Z.; Su, Y.; Li, L.; Wang, X.; Guo, X. Tracking Changing Evidences of Water in Wetland Using the Satellite Long-Term Observations from 1984 to 2017. Water 2020, 12, 1602. [Google Scholar] [CrossRef]
- Krause, C.E.; Newey, V.; Alger, M.J.; Lymburner, L. Mapping and Monitoring the Multi-Decadal Dynamics of Australia’s Open Waterbodies Using Landsat. Remote Sens. 2021, 13, 1437. [Google Scholar] [CrossRef]
- Carroll, M.; Wooten, M.; DiMiceli, C.; Sohlberg, R.; Kelly, M. Quantifying Surface Water Dynamics at 30 Meter Spatial Resolution in the North American High Northern Latitudes 1991–2011. Remote Sens. 2016, 8, 622. [Google Scholar] [CrossRef] [Green Version]
- Vanderhoof, M.K.; Christensen, J.; Beal, Y.J.G.; DeVries, B.; Lang, M.W.; Hwang, N.; Mazzarella, C.; Jones, J.W. Isolating Anthropogenic Wetland Loss by Concurrently Tracking Inundation and Land Cover Disturbance across the Mid-Atlantic Region, U.S. Remote Sens. 2020, 12, 1464. [Google Scholar] [CrossRef] [PubMed]
- Halabisky, M.; Moskal, L.M.; Gillespie, A.; Hannam, M. Reconstructing Semi-Arid Wetland Surface Water Dynamics through Spectral Mixture Analysis of a Time Series of Landsat Satellite Images (1984–2011). Remote Sens. Environ. 2016, 177, 171–183. [Google Scholar] [CrossRef]
- Adeli, S.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.J.; Brisco, B.; Tamiminia, H.; Shaw, S. Wetland Monitoring Using SAR Data: A Meta-Analysis and Comprehensive Review. Remote Sens. 2020, 12, 2190. [Google Scholar] [CrossRef]
- Che, X.; Feng, M.; Sexton, J.; Channan, S.; Sun, Q.; Ying, Q.; Liu, J.; Wang, Y. Landsat-Based Estimation of Seasonal Water Cover and Change in Arid and Semi-Arid Central Asia (2000–2015). Remote Sens. 2019, 11, 1323. [Google Scholar] [CrossRef] [Green Version]
- Jones, J.W. Efficient Wetland Surface Water Detection and Monitoring via Landsat: Comparison with in Situ Data from the Everglades Depth Estimation Network. Remote Sens. 2015, 7, 12503–12538. [Google Scholar] [CrossRef] [Green Version]
- Mahdianpari, M.; Jafarzadeh, H.; Granger, J.E.; Mohammadimanesh, F.; Salehi, B.; Homayouni, S.; Weng, Q.; Jafarzadeh, H.; Granger, J.E.; Mohammadimanesh, F. A Large-Scale Change Monitoring of Wetlands Using Time Series Landsat Imagery on Google Earth Engine: A Case Study in Newfoundland. GISci. Remote Sens. 2020, 57, 1102–1124. [Google Scholar] [CrossRef]
- Wulder, M.A.; Li, Z.; Campbell, E.M.; White, J.C.; Hobart, G.; Hermosilla, T.; Coops, N.C. A National Assessment Ofwetland Status and Trends for Canada’s Forested Ecosystems Using 33 Years of Earth Observation Satellite Data. Remote Sens. 2018, 10, 1623. [Google Scholar] [CrossRef] [Green Version]
- Sall, I.; Jarchow, C.J.; Sigafus, B.H.; Eby, L.A.; Forzley, M.J.; Hossack, B.R. Estimating Inundation of Small Waterbodies with Sub-Pixel Analysis of Landsat Imagery: Long-Term Trends in Surface Water Area and Evaluation of Common Drought Indices. Remote Sens. Ecol. Conserv. 2021, 7, 109–124. [Google Scholar] [CrossRef]
- Kayastha, N.; Thomas, V.; Galbraith, J.; Banskota, A. Monitoring Wetland Change Using Inter-Annual Landsat Time-Series Data. Wetlands 2012, 32, 1149–1162. [Google Scholar] [CrossRef]
- Halabisky, M.; Babcock, C.; Moskal, L.M. Harnessing the Temporal Dimension to Improve Object-Based Image Analysis Classification of Wetlands. Remote Sens. 2018, 10, 1467. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting Trends in Forest Disturbance and Recovery Using Yearly Landsat Time Series: 1. LandTrendr—Temporal Segmentation Algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.; Gorelick, N.; Braaten, J.; Cavalcante, L.; Cohen, W.B.; Healey, S. Implementation of the LandTrendr Algorithm on Google Earth Engine. Remote Sens. 2018, 10, 691. [Google Scholar] [CrossRef] [Green Version]
- Bonney, M.T.; He, Y.; Myint, S.W. Contextualizing the 2019–2020 Kangaroo Island Bushfires: Quantifying Landscape-Level Influences on Past Severity and Recovery with Landsat and Google Earth Engine. Remote Sens. 2020, 12, 3942. [Google Scholar] [CrossRef]
- Vogeler, J.C.; Braaten, J.D.; Slesak, R.A.; Falkowski, M.J. Extracting the Full Value of the Landsat Archive: Inter-Sensor Harmonization for the Mapping of Minnesota Forest Canopy Cover (1973–2015). Remote Sens. Environ. 2018, 209, 363–374. [Google Scholar] [CrossRef]
- Ye, L.; Liu, M.; Liu, X.; Zhu, L. Developing a New Disturbance Index for Tracking Gradual Change of Forest Ecosystems in the Hilly Red Soil Region of Southern China Using Dense Landsat Time Series. Ecol. Inform. 2021, 61, 101221. [Google Scholar] [CrossRef]
- Long, X.; Li, X.; Lin, H.; Zhang, M. Mapping the Vegetation Distribution and Dynamics of a Wetland Using Adaptive-Stacking and Google Earth Engine Based on Multi-Source Remote Sensing Data. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102453. [Google Scholar] [CrossRef]
- Chai, X.R.; Li, M.; Wang, G.W. Characterizing Surface Water Changes across the Tibetan Plateau Based on Landsat Time Series and LandTrendr Algorithm. Eur. J. Remote Sens. 2022, 55, 251–262. [Google Scholar] [CrossRef]
- Braaten, J.D.; Kennedy, R.E. LT-GEE Guide. Available online: https://emapr.github.io/LT-GEE/ (accessed on 24 May 2022).
- Kloiber, S.M. Status and Trends of Wetlands in Minnesota: Wetland Quantity Baseline; Department of Natural Resources: St. Paul, MN, USA, 2010; p. 28.
- Leibowitz, S.G.; Mushet, D.M.; Newton, W.E. Intermittent Surface Water Connectivity: Fill and Spill vs. Fill and Merge Dynamics. Wetlands 2016, 36, 323–342. [Google Scholar] [CrossRef]
- Vanderhoof, M.K.; Alexander, L.C. The Role of Lake Expansion in Altering the Wetland Landscape of the Prairie Pothole Region, United States. Wetlands 2016, 36, 309–321. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wulder, M.A.; White, J.C.; Loveland, T.R.; Woodcock, C.E.; Belward, A.S.; Cohen, W.B.; Fosnight, E.A.; Shaw, J.; Masek, J.G.; Roy, D.P. The Global Landsat Archive: Status, Consolidation, and Direction. Remote Sens. Environ. 2016, 185, 271–283. [Google Scholar] [CrossRef] [Green Version]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Runge, A.; Grosse, G. Mosaicking Landsat and Sentinel-2 Data to Enhance LandTrendr Time Series Analysis in Northern High Latitude Permafrost Regions. Remote Sens. 2020, 12, 2471. [Google Scholar] [CrossRef]
- Claverie, M.; Ju, J.; Masek, J.G.; Dungan, J.L.; Vermote, E.F.; Roger, J.C.; Skakun, S.V.; Justice, C. The Harmonized Landsat and Sentinel-2 Surface Reflectance Data Set. Remote Sens. Environ. 2018, 219, 145–161. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Baez-Villanueva, O.M.; Bui, D.D.; Nguyen, P.T.; Ribbe, L. Harmonization of Landsat and Sentinel 2 for Crop Monitoring in Drought Prone Areas: Case Studies of Ninh Thuan (Vietnam) and Bekaa (Lebanon). Remote Sens. 2020, 12, 281. [Google Scholar] [CrossRef] [Green Version]
- Poortinga, A.; Tenneson, K.; Shapiro, A.; Nquyen, Q.; Aung, K.S.; Chishtie, F.; Saah, D. Mapping Plantations in Myanmar by Fusing Landsat-8, Sentinel-2 and Sentinel-1 Data along with Systematic Error Quantification. Remote Sens. 2019, 11, 831. [Google Scholar] [CrossRef] [Green Version]
- Roy, D.P.; Kovalskyy, V.; Zhang, H.K.; Vermote, E.F.; Yan, L.; Kumar, S.S.; Egorov, A. Characterization of Landsat-7 to Landsat-8 Reflective Wavelength and Normalized Difference Vegetation Index Continuity. Remote Sens. Environ. 2016, 185, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Rampi, L.P.; Knight, J.F.; Bauer, M. Minnesota Land Cover Classification and Impervious Surface Area by Landsat and Lidar: 2013-14 Update; University of Minnesota: Minneapolis, MN, USA, 2016. [Google Scholar] [CrossRef]
- De Vries, B.; Huang, C.; Lang, M.W.; Jones, J.W.; Huang, W.; Creed, I.F.; Carroll, M.L. Automated Quantification of Surface Water Inundation in Wetlands Using Optical Satellite Imagery. Remote Sens. 2017, 9, 807. [Google Scholar] [CrossRef] [Green Version]
- Jones, J.W. Improved Automated Detection of Subpixel-Scale Inundation-Revised Dynamic Surface Water Extent (DSWE) Partial Surface Water Tests. Remote Sens. 2019, 11, 374. [Google Scholar] [CrossRef] [Green Version]
- Wilson, J.P.; Gallant, J.C. Terrain Analysis: Principles and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Lehner, B.; Verdin, K.; Jarvis, A. New Global Hydrography Derived from Spaceborne Elevation Data. Eos Trans. Am. Geophys. Union 2008, 89, 93–94. [Google Scholar] [CrossRef]
- Boulesteix, A.-L.; Janitza, S.; Kruppa, J.; König, I.R. Overview of Random Forest Methodology and Practical Guidance with Emphasis on Computational Biology and Bioinformatics. WIREs Data Min. Knowl. Discov. 2012, 2, 493–507. [Google Scholar] [CrossRef] [Green Version]
- Crist, E.P. A TM Tasseled Cap Equivalent Transformation for Reflectance Factor Data. Remote Sens. Environ. 1985, 17, 301–306. [Google Scholar] [CrossRef]
- McFeeters, S.K. The Use of the Normalized Difference Water Index (NDWI) in the Delineation of Open Water Features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of Normalised Difference Water Index (NDWI) to Enhance Open Water Features in Remotely Sensed Imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and Photographic Infrared Linear Combinations for Monitoring Vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Arnaud, M. The SPOT Program—Status of the Current Satellites and the Future. In Proceedings of the Euro-Asian Space Week—Co-Operation in Space: Where East & West Finally Meet, Singapore, 23–27 November 1998; European Space Agency: Paris, France, 1999; Volume 430, pp. 369–376. [Google Scholar]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data, Principles and Practices; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Masek, J.G.; Wulder, M.A.; Markham, B.; McCorkel, J.; Crawford, C.J.; Storey, J.; Jenstrom, D.T. Landsat 9: Empowering Open Science and Applications through Continuity. Remote Sens. Environ. 2020, 248, 111968. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale Geospatial Analysis for Everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Noe, R.R.; Keeler, B.L.; Twine, T.E.; Brauman, K.A.; Mayer, T.; Rogers, M. Climate Change Projections for Improved Management of Infrastructure, Industry, and Water Resources in Minnesota. University of Minnesota Digital Conservancy. 2019. Available online: https://hdl.handle.net/11299/209130 (accessed on 24 May 2022).
- Kloiber, S.M.; Macleod, R.D.; Smith, A.J.; Knight, J.F.; Huberty, B.J. A Semi-Automated, Multi-Source Data Fusion Update of a Wetland Inventory for East-Central Minnesota, USA. Wetlands 2015, 35, 335–348. [Google Scholar] [CrossRef]
- Oslund, F.T.; Johnson, R.R.; Hertel, D.R. Assessing Wetland Changes in the Prairie Pothole Region of Minnesota from 1980 to 2007. J. Fish Wildl. Manag. 2010, 1, 131–135. [Google Scholar] [CrossRef]




| Parameter: | Description: | Value: |
|---|---|---|
| Maximum Segments (maxSegments) | Maximum number of segments allowed in the fitted segmentation | 11 |
| Spike Threshold (spikeThreshold) | Threshold for dampening spikes (1.0 is no dampening) | 0.5 |
| Vertex Count Overshoot (vertexCountOvershoot) | The number of vertices by which the initial model can exceed the maximum segments before pruning | 2 |
| Prevent One Year Recovery (preventOneYearRecovery) | Whether to prevent segments that are a one-year recovery back to a previous level | False * |
| Recovery Threshold (recoveryThreshold) | Segment slopes are limited to a rate of less than 1/Recovery Threshold | 0.25 |
| p-value Threshold (pvalThreshold) | Maximum p-value of the best model. | 0.1 |
| Best Model Proportion (bestModelProportion) | Defines the best model as that with the most vertices with a p-value that is at most this proportion away from the model with the lowest p-value | 1 |
| Minimum Number of Observations Needed (minObsNeeded) | Minimum number of observations in the time series for the model to fit. | 31 * |
| Classification | Row Total: | |||
|---|---|---|---|---|
| Dry: | Inundated: | |||
| Reference | Dry: | 4685 | 47 | 4732 |
| Inundated: | 78 | 350 | 428 | |
| Column Total: | 4763 | 397 | n = 5160 | |
| Inundated Producer’s Accuracy: | 82% | |||
| Inundated User’s Accuracy: | 88% | |||
| Overall Accuracy: | 98% | |||
| Kappa Coefficient: | 0.835 | |||
| Classification (Northern Forests) | Row Total: | |||
|---|---|---|---|---|
| Dry: | Inundated: | |||
| Reference (Northern Forests) | Dry: | 1659 | 28 | 1687 |
| Inundated: | 38 | 219 | 257 | |
| Column Total: | 1697 | 247 | n = 1944 | |
| Inundated Producer’s Accuracy: | 85% | |||
| Inundated User’s Accuracy: | 89% | |||
| Overall Accuracy: | 97% | |||
| Kappa Coefficient: | 0.850 | |||
| Classification (Eastern Temperate Forest) | Row Total: | |||
|---|---|---|---|---|
| Dry: | Inundated: | |||
| Reference (Eastern Temperate Forest) | Dry: | 1095 | 11 | 1106 |
| Inundated: | 14 | 83 | 97 | |
| Column Total: | 1109 | 94 | n = 1203 | |
| Inundated Producer’s Accuracy: | 86% | |||
| Inundated User’s Accuracy: | 88% | |||
| Overall Accuracy: | 98% | |||
| Kappa Coefficient: | 0.858 | |||
| Classification (Great Plains) | Row Total: | |||
|---|---|---|---|---|
| Dry: | Inundated: | |||
| Reference (Great Plains) | Dry: | 1931 | 8 | 1939 |
| Inundated: | 26 | 48 | 74 | |
| Column Total: | 1957 | 56 | n = 2013 | |
| Inundated Producer’s Accuracy: | 65% | |||
| Inundated User’s Accuracy: | 86% | |||
| Overall Accuracy: | 98% | |||
| Kappa Coefficient: | 0.730 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lothspeich, A.C.; Knight, J.F. The Applicability of LandTrendr to Surface Water Dynamics: A Case Study of Minnesota from 1984 to 2019 Using Google Earth Engine. Remote Sens. 2022, 14, 2662. https://doi.org/10.3390/rs14112662
Lothspeich AC, Knight JF. The Applicability of LandTrendr to Surface Water Dynamics: A Case Study of Minnesota from 1984 to 2019 Using Google Earth Engine. Remote Sensing. 2022; 14(11):2662. https://doi.org/10.3390/rs14112662
Chicago/Turabian StyleLothspeich, Audrey C., and Joseph F. Knight. 2022. "The Applicability of LandTrendr to Surface Water Dynamics: A Case Study of Minnesota from 1984 to 2019 Using Google Earth Engine" Remote Sensing 14, no. 11: 2662. https://doi.org/10.3390/rs14112662
APA StyleLothspeich, A. C., & Knight, J. F. (2022). The Applicability of LandTrendr to Surface Water Dynamics: A Case Study of Minnesota from 1984 to 2019 Using Google Earth Engine. Remote Sensing, 14(11), 2662. https://doi.org/10.3390/rs14112662