



SMFF-YOLO: A Scale-Adaptive YOLO Algorithm with Multi-Level Feature Fusion for Object Detection in UAV Scenes


Abstract
:
1. Introduction
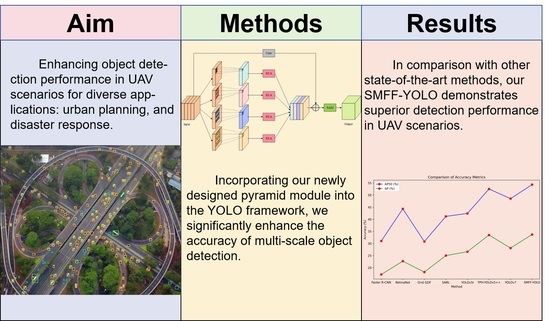
- We present SMFF-YOLO, a novel one-stage detection framework for accurate object detection in UAV images. It introduces a novel type of prediction head that fuses convolution with Swin Transformer, enhancing feature representation by combining global and local information. Furthermore, a specialized prediction head is added to detect tiny objects effectively.
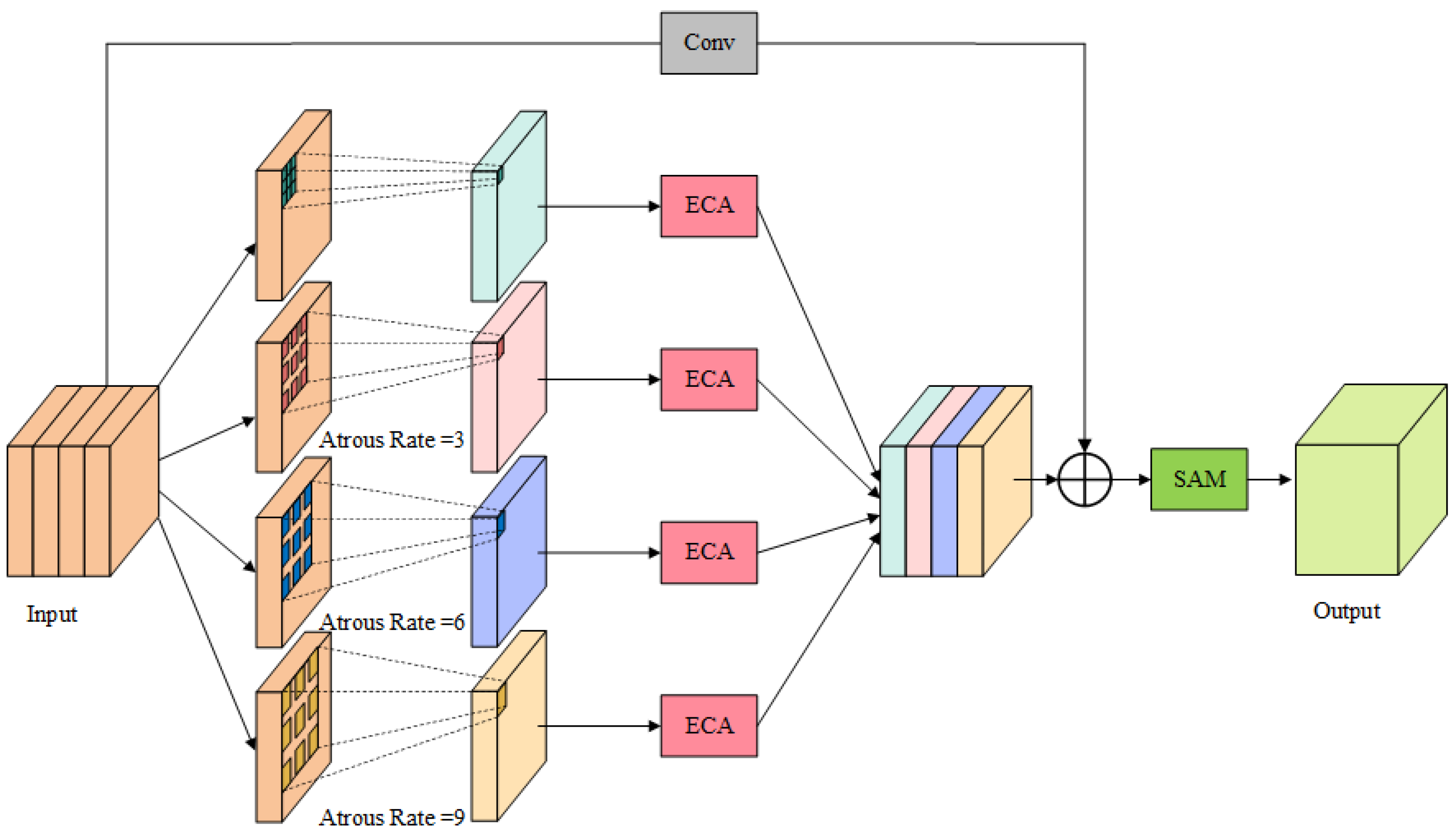
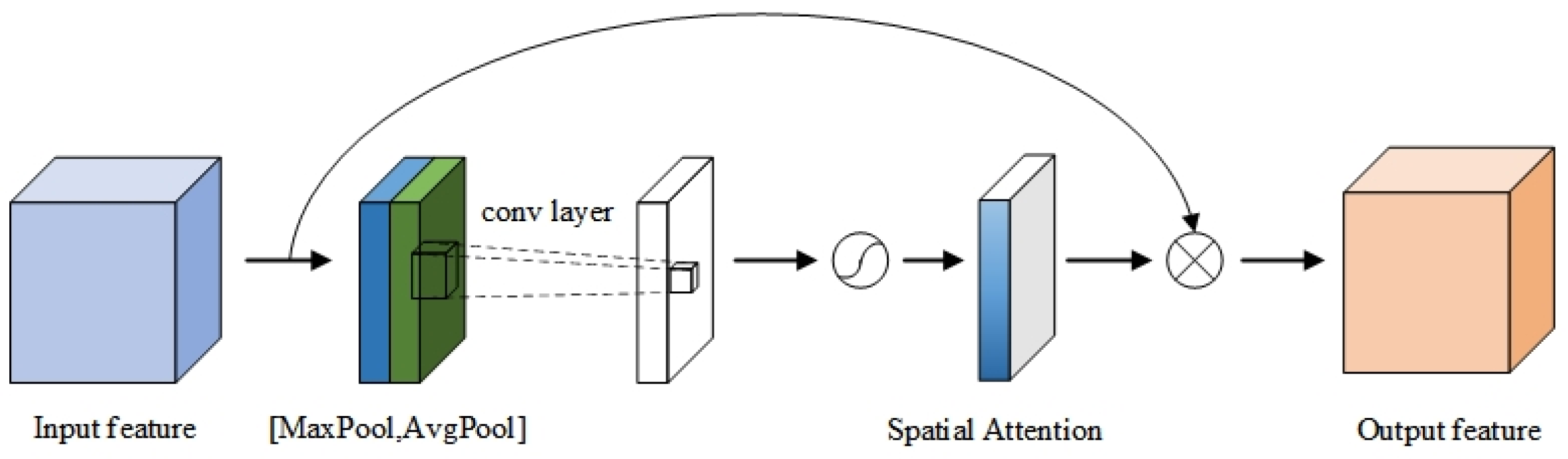
- To improve object detection across scales, we introduce the adaptive atrous spatial pyramid pooling (AASPP) module. This facilitates cross-scale feature fusion and employs mixed attention mechanisms for enhanced feature information. We also propose the bidirectional feature fusion pyramid (BFFP) model to enhance multi-scale fusion via bidirectional information flow.
- For better regression anchor accuracy in SMFF-YOLO, we adopt Wise-IoU (WIoU) as the bounding box regression loss. This serves to balance anchor box competitiveness and address gradient issues from low-quality samples, which enhances the model’s overall performance.
- We evaluate the performance of SMFF-YOLO by comparing it with several state-of-the-art detection models on the VisDrone and UAVDT datasets. The experimental results clearly show that our proposed method excels in detecting objects in challenging scenarios characterized by substantial variations in object scales.
2. Related Work
2.1. Traditional Object Detection Methods and Deep Learning-Based Object Detection Methods
2.2. Deep Learning-Based Object Detection Methods for UAV-Captured Images
3. Proposed Method
3.1. Additional Tiny Object and Swin Transform Prediction Heads
3.2. Adaptive Atrous Spatial Pyramid Pooling Module
3.3. Bidirectional Feature Fusion Pyramid
3.4. Loss Function
4. Experiments
4.1. Dataset Introduction
4.2. Implementation Details
4.3. Evaluation Metrics
4.4. Analysis of Results
4.4.1. Effect of Additional Tiny Object and Swin Transform Prediction Heads
4.4.2. Effect of AASPP Module
4.4.3. Effect of the BFFP Module
4.4.4. Comparison with State-of-the-Art Methods
4.4.5. Summary of Experimental Results
4.5. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gu, J.; Su, T.; Wang, Q.; Du, X.; Guizani, M. Multiple moving targets surveillance based on a cooperative network for multi-UAV. IEEE Commun. Mag. 2018, 56, 82–89. [Google Scholar] [CrossRef]
- Hird, J.N.; Montaghi, A.; McDermid, G.J.; Kariyeva, J.; Moorman, B.J.; Nielsen, S.E.; McIntosh, A.C. Use of unmanned aerial vehicles for monitoring recovery of forest vegetation on petroleum well sites. Remote Sens. 2017, 9, 413. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; Volume 28. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings, Part I 14. Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-end object detection with transformers. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 213–229. [Google Scholar]
- Li, F.; Zeng, A.; Liu, S.; Zhang, H.; Li, H.; Zhang, L.; Ni, L.M. Lite DETR: An interleaved multi-scale encoder for efficient detr. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 18558–18567. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the Computer Vision–ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014; Proceedings, Part V 13. Springer: Berlin/Heidelberg, Germany, 2014; pp. 740–755. [Google Scholar]
- Everingham, M.; Eslami, S.A.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes challenge: A retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- Zhu, L.; Xiong, J.; Xiong, F.; Hu, H.; Jiang, Z. YOLO-Drone: Airborne real-time detection of dense small objects from high-altitude perspective. arXiv 2023, arXiv:2304.06925. [Google Scholar]
- Zhu, L.; Wang, X.; Ke, Z.; Zhang, W.; Lau, R.W. BiFormer: Vision Transformer with Bi-Level Routing Attention. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 10323–10333. [Google Scholar]
- Li, C.; Zhou, A.; Yao, A. Omni-dimensional dynamic convolution. arXiv 2022, arXiv:2209.07947. [Google Scholar]
- Qi, G.; Zhang, Y.; Wang, K.; Mazur, N.; Liu, Y.; Malaviya, D. Small object detection method based on adaptive spatial parallel convolution and fast multi-scale fusion. Remote Sens. 2022, 14, 420. [Google Scholar] [CrossRef]
- Jiao, L.; Zhang, F.; Liu, F.; Yang, S.; Li, L.; Feng, Z.; Qu, R. A survey of deep learning-based object detection. IEEE Access 2019, 7, 128837–128868. [Google Scholar] [CrossRef]
- Zhang, S.; Benenson, R.; Omran, M.; Hosang, J.; Schiele, B. How far are we from solving pedestrian detection? In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1259–1267. [Google Scholar]
- Yang, Z.; Liu, S.; Hu, H.; Wang, L.; Lin, S. Reppoints: Point set representation for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9657–9666. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 10012–10022. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 7464–7475. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Volume 25. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6154–6162. [Google Scholar]
- Pang, J.; Chen, K.; Shi, J.; Feng, H.; Ouyang, W.; Lin, D. Libra r-cnn: Towards balanced learning for object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 821–830. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Law, H.; Deng, J. Cornernet: Detecting objects as paired keypoints. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 734–750. [Google Scholar]
- Du, D.; Qi, Y.; Yu, H.; Yang, Y.; Duan, K.; Li, G.; Zhang, W.; Huang, Q.; Tian, Q. The unmanned aerial vehicle benchmark: Object detection and tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 370–386. [Google Scholar]
- Zhu, P.; Wen, L.; Du, D.; Bian, X.; Fan, H.; Hu, Q.; Ling, H. Detection and tracking meet drones challenge. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 7380–7399. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Hua, Y.; Zou, H.; Ke, G. A lightweight network for vehicle detection based on embedded system. J. Supercomput. 2022, 78, 18209–18224. [Google Scholar] [CrossRef]
- Chen, Y.; Li, J.; Niu, Y.; He, J. Small object detection networks based on classification-oriented super-resolution GAN for UAV aerial imagery. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 4610–4615. [Google Scholar]
- Yang, F.; Fan, H.; Chu, P.; Blasch, E.; Ling, H. Clustered object detection in aerial images. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8311–8320. [Google Scholar]
- Zhang, R.; Newsam, S.; Shao, Z.; Huang, X.; Wang, J.; Li, D. Multi-scale adversarial network for vehicle detection in UAV imagery. ISPRS J. Photogramm. Remote Sens. 2021, 180, 283–295. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, S.; Zhan, R.; Wang, W.; Zhang, J. LMSD-YOLO: A Lightweight YOLO Algorithm for Multi-Scale SAR Ship Detection. Remote Sens. 2022, 14, 4801. [Google Scholar] [CrossRef]
- Sun, Z.; Leng, X.; Lei, Y.; Xiong, B.; Ji, K.; Kuang, G. BiFA-YOLO: A novel YOLO-based method for arbitrary-oriented ship detection in high-resolution SAR images. Remote Sens. 2021, 13, 4209. [Google Scholar] [CrossRef]
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 2778–2788. [Google Scholar]
- Zhao, Q.; Liu, B.; Lyu, S.; Wang, C.; Zhang, H. TPH-YOLOv5++: Boosting Object Detection on Drone-Captured Scenarios with Cross-Layer Asymmetric Transformer. Remote Sens. 2023, 15, 1687. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, X.; Cao, G.; Yang, Y.; Jiao, L.; Liu, F. ViT-YOLO: Transformer-based YOLO for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 2799–2808. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. Efficientdet: Scalable and efficient object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Montreal, BC, Canada, 11–17 October 2021; pp. 10781–10790. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient channel attention for deep convolutional neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Montreal, BC, Canada, 11–17 October 2021; pp. 11534–11542. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- Ghiasi, G.; Lin, T.Y.; Le, Q.V. Nas-fpn: Learning scalable feature pyramid architecture for object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 7036–7045. [Google Scholar]
- Liu, S.; Huang, D.; Wang, Y. Learning spatial fusion for single-shot object detection. arXiv 2019, arXiv:1911.09516. [Google Scholar]
- Qiao, S.; Chen, L.C.; Yuille, A. Detectors: Detecting objects with recursive feature pyramid and switchable atrous convolution. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Montreal, BC, Canada, 11–17 October 2021; pp. 10213–10224. [Google Scholar]
- Tong, Z.; Chen, Y.; Xu, Z.; Yu, R. Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism. arXiv 2023, arXiv:2301.10051. [Google Scholar]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU loss: Faster and better learning for bounding box regression. AAAI Conf. Artif. Intell. 2020, 34, 12993–13000. [Google Scholar] [CrossRef]
- Zhang, Y.F.; Ren, W.; Zhang, Z.; Jia, Z.; Wang, L.; Tan, T. Focal and efficient IOU loss for accurate bounding box regression. Neurocomputing 2022, 506, 146–157. [Google Scholar] [CrossRef]
- Gevorgyan, Z. SIoU loss: More powerful learning for bounding box regression. arXiv 2022, arXiv:2205.12740. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Zhang, R.; Shao, Z.; Huang, X.; Wang, J.; Wang, Y.; Li, D. Adaptive dense pyramid network for object detection in UAV imagery. Neurocomputing 2022, 489, 377–389. [Google Scholar] [CrossRef]
- Zhang, R.; Shao, Z.; Huang, X.; Wang, J.; Li, D. Object detection in UAV images via global density fused convolutional network. Remote Sens. 2020, 12, 3140. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, J.; Chen, X.; Zhang, D. How to fully exploit the abilities of aerial image detectors. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Deng, S.; Li, S.; Xie, K.; Song, W.; Liao, X.; Hao, A.; Qin, H. A global-local self-adaptive network for drone-view object detection. IEEE Trans. Image Process. 2020, 30, 1556–1569. [Google Scholar] [CrossRef]
- Li, C.; Yang, T.; Zhu, S.; Chen, C.; Guan, S. Density map guided object detection in aerial images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 190–191. [Google Scholar]
- Yu, W.; Yang, T.; Chen, C. Towards resolving the challenge of long-tail distribution in UAV images for object detection. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–8 January 2021; pp. 3258–3267. [Google Scholar]
- Duan, C.; Wei, Z.; Zhang, C.; Qu, S.; Wang, H. Coarse-grained density map guided object detection in aerial images. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 2789–2798. [Google Scholar]
- Huang, Y.; Chen, J.; Huang, D. UFPMP-Det: Toward accurate and efficient object detection on drone imagery. AAAI Conf. Artif. Intell. 2022, 36, 1026–1033. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prediction Head | Size | AP50 (%) | AP (%) |
|---|---|---|---|
| P4 | 35.0 | 18.1 | |
| P3 | 46.5 | 27.1 | |
| P3, P4 | 47.6 | 27.8 | |
| P2 | 49.5 | 31.1 | |
| P2, P3, P4 | 51.8 | 31.7 | |
| P1 | 36.3 | 24.5 | |
| P1, P2, P3, P4 | 52.7 | 32.5 |
| Method | P (%) | R (%) | F1 | AP50 (%) | AP (%) |
|---|---|---|---|---|---|
| YOLOv7 | 58.2 | 52.3 | 55.1 | 51.8 | 31.7 |
| YOLOv7-4Heads | 58.8 | 53.4 | 56.0 | 52.7 | 32.5 |
| YOLOv7-4Heads-SW | 60.3 | 53.7 | 56.8 | 53.7 | 33.3 |
| Experiment | Number of Atrous Convolutions | Dilation Rates | AP50 (%) | AP (%) |
|---|---|---|---|---|
| I | 3 | 3, 5, 7 | 53.9 | 33.2 |
| II | 3 | 3, 6, 9 | 54.1 | 33.5 |
| III | 3 | 4, 8, 12 | 53.7 | 33.1 |
| IV | 3 | 5, 10, 15 | 53.5 | 32.9 |
| V | 3 | 6, 12, 18 | 53.8 | 33.3 |
| VI | 3 | 3, 6, 9, 12 | 54.0 | 33.4 |
| VII | 3 | 4, 8, 12, 16 | 53.9 | 33.3 |
| Method | P (%) | R (%) | F1 | AP50 (%) | AP (%) | FLOPs (G) | Params (M) |
|---|---|---|---|---|---|---|---|
| SPP | 59.5 | 53.3 | 56.2 | 53.7 | 33.0 | 0.9 | 2.6 |
| SPPF | 59.1 | 53.7 | 56.3 | 53.8 | 33.1 | 0.9 | 2.6 |
| ASPP | 59.5 | 54.1 | 56.7 | 53.9 | 33.3 | 7.0 | 10.2 |
| SPPCSPC | 59.7 | 53.6 | 56.5 | 53.6 | 33.1 | 21.5 | 28.3 |
| SPPFCSPC | 58.9 | 53.3 | 56.0 | 53.3 | 32.9 | 21.5 | 28.3 |
| AASPP | 59.5 | 54.3 | 56.8 | 54.1 | 33.5 | 16.4 | 18.4 |
| Method | P (%) | R (%) | F1 | AP50 (%) | AP (%) |
|---|---|---|---|---|---|
| YOLOv5m-improved | 52.3 | 49.6 | 50.9 | 47.1 | 26.2 |
| YOLOv5l-improved | 53.6 | 50.1 | 51.8 | 49.4 | 28.6 |
| YOLOv5x-improved | 55.8 | 52.7 | 54.4 | 51.6 | 30.3 |
| YOLOv7-improved | 59.5 | 54.3 | 56.8 | 54.1 | 33.5 |
| SMFF-YOLO | 59.8 | 54.5 | 57.0 | 54.3 | 33.7 |
| Method | AP50 (%) | AP (%) | FLOPs (G) | Params (M) |
|---|---|---|---|---|
| Faster R-CNN [3] | 31.0 | 17.2 | 118.8 | 41.2 |
| Cascade ADPN [56] | 38.7 | 22.8 | 547.2 | 90.8 |
| Cascade-RCNN [24] | 38.8 | 22.6 | 146.6 | 69.0 |
| RetinaNet [6] | 44.3 | 22.7 | 35.7 | 36.4 |
| Grid GDF [57] | 30.8 | 18.2 | 257.6 | 72.0 |
| SABL | 41.2 | 25.0 | 145.5 | 99.6 |
| YOLOv5l | 42.4 | 26.6 | 107.8 | 46.2 |
| TPH-YOLOv5++ [38] | 52.5 | 33.5 | 207.0 | - |
| YOLOv7 [19] | 48.5 | 28.1 | 104.7 | 36.9 |
| SMFF-YOLO | 54.3 | 33.7 | 257.7 | 99.1 |
| Method | AP50 (%) | AP75 (%) | AP (%) |
|---|---|---|---|
| ClusDet [33] | 26.5 | 12.5 | 13.7 |
| Zhang et al. [58] | - | - | 17.7 |
| GDFNet [57] | 26.1 | 21.7 | 15.4 |
| GLSAN [59] | 30.5 | 21.7 | 19.0 |
| DMNet [60] | 24.6 | 16.3 | 14.7 |
| DSHNet [61] | 30.4 | 19.7 | 17.8 |
| CDMNet [62] | 35.5 | 22.4 | 20.7 |
| SODNet [14] | 29.9 | 18.0 | 17.1 |
| UFPMP-Net [63] | 38.7 | 28.0 | 24.6 |
| SMFF-YOLO | 42.4 | 33.6 | 28.4 |
| Method | P (%) | R (%) | F1 |
|---|---|---|---|
| YOLOv5l | 57.8 | 80.5 | 67.9 |
| YOLOv7 | 61.1 | 78.7 | 68.8 |
| SMFF-YOLO | 65.0 | 76.5 | 70.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zou, H.; Yin, M.; Zhang, X. SMFF-YOLO: A Scale-Adaptive YOLO Algorithm with Multi-Level Feature Fusion for Object Detection in UAV Scenes. Remote Sens. 2023, 15, 4580. https://doi.org/10.3390/rs15184580
Wang Y, Zou H, Yin M, Zhang X. SMFF-YOLO: A Scale-Adaptive YOLO Algorithm with Multi-Level Feature Fusion for Object Detection in UAV Scenes. Remote Sensing. 2023; 15(18):4580. https://doi.org/10.3390/rs15184580
Chicago/Turabian StyleWang, Yuming, Hua Zou, Ming Yin, and Xining Zhang. 2023. "SMFF-YOLO: A Scale-Adaptive YOLO Algorithm with Multi-Level Feature Fusion for Object Detection in UAV Scenes" Remote Sensing 15, no. 18: 4580. https://doi.org/10.3390/rs15184580
APA StyleWang, Y., Zou, H., Yin, M., & Zhang, X. (2023). SMFF-YOLO: A Scale-Adaptive YOLO Algorithm with Multi-Level Feature Fusion for Object Detection in UAV Scenes. Remote Sensing, 15(18), 4580. https://doi.org/10.3390/rs15184580