
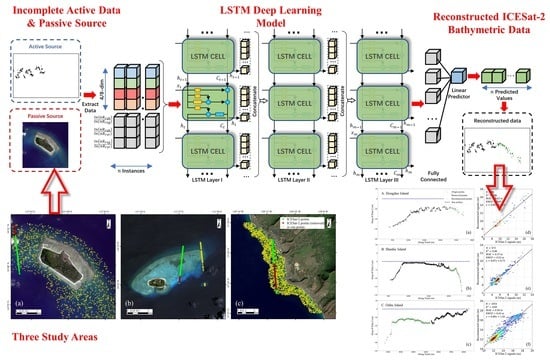
ICESat-2 Bathymetric Signal Reconstruction Method Based on a Deep Learning Model with Active–Passive Data Fusion



Abstract
:
1. Introduction
2. Data and Study Areas
2.1. Active/Passive Data
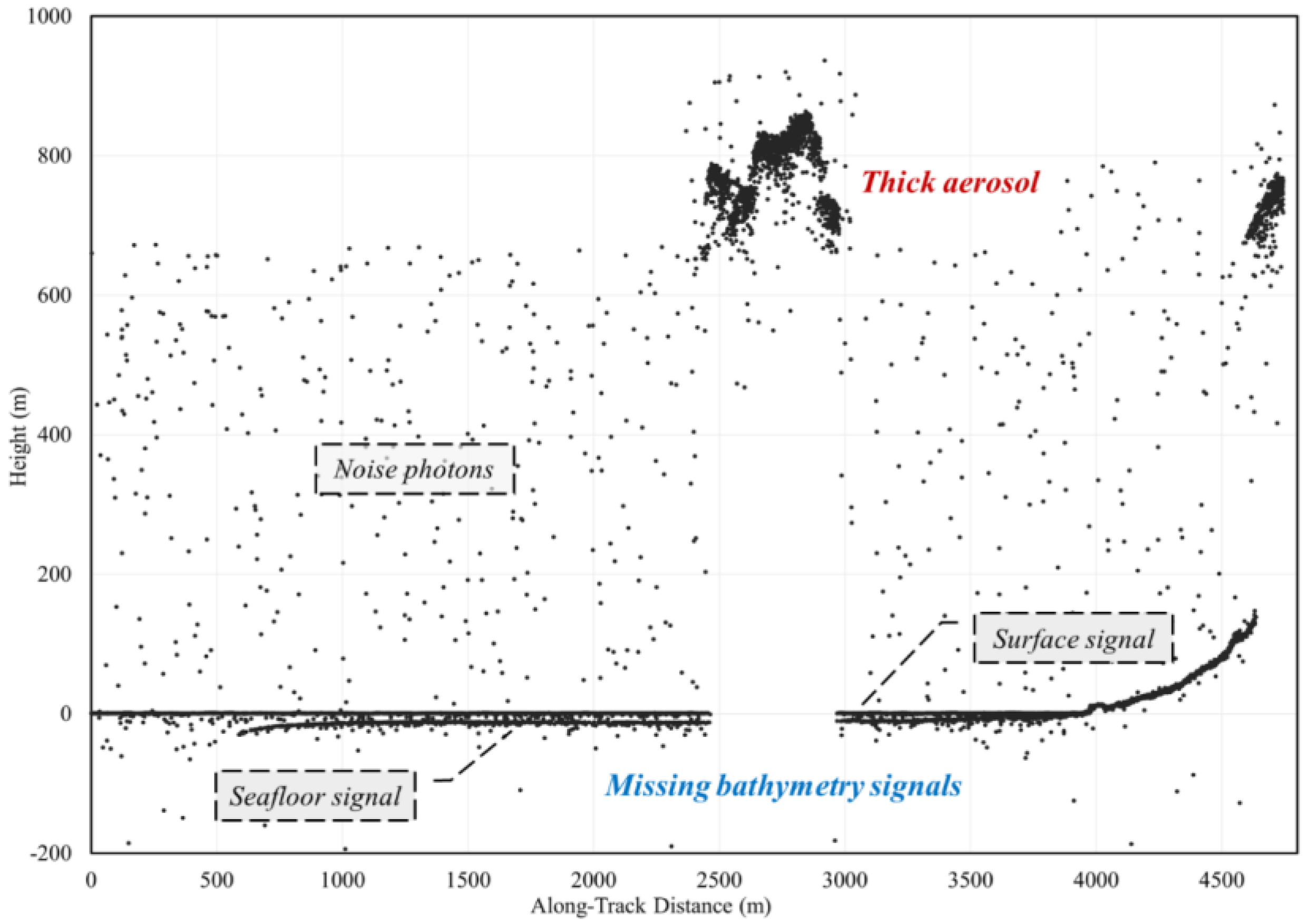
2.1.1. Active Data: ICESat-2 LiDAR Data
2.1.2. Passive Data: Multispectral Remote Sensing Imagery
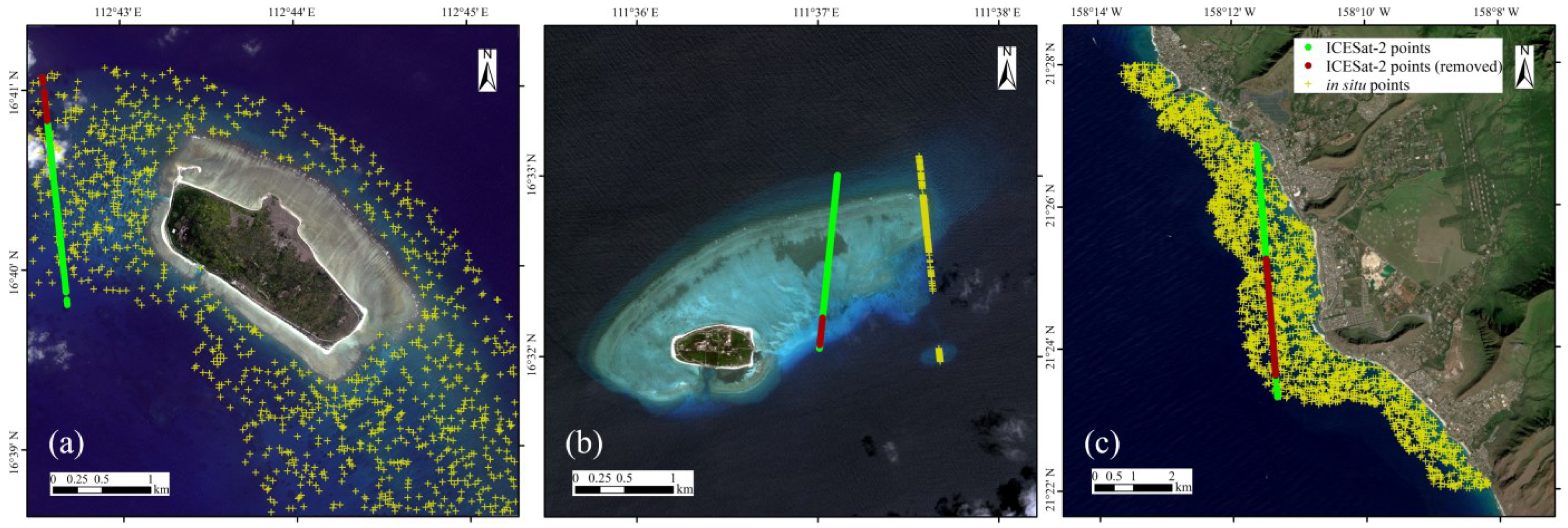
2.2. Study Areas
3. Methods
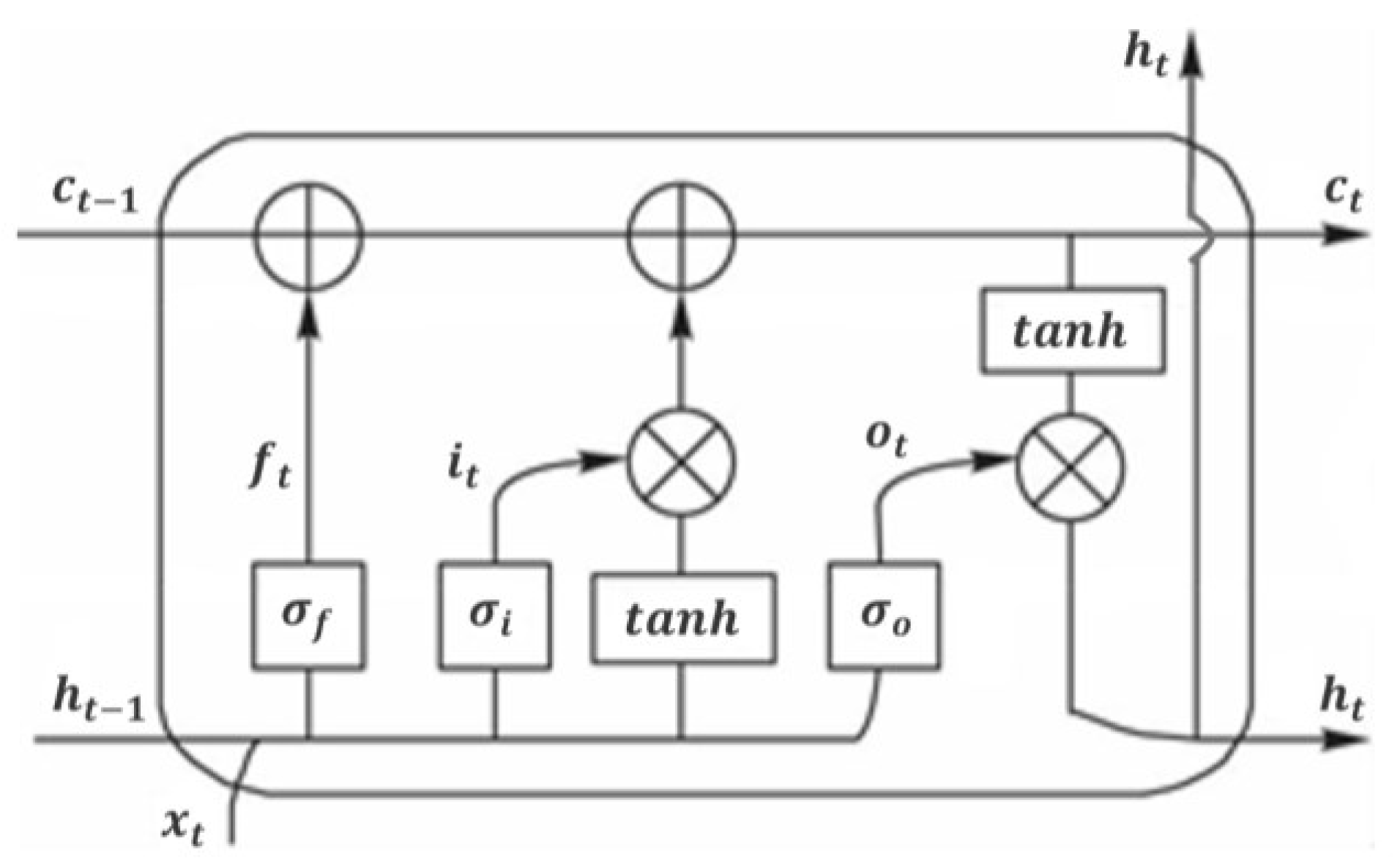
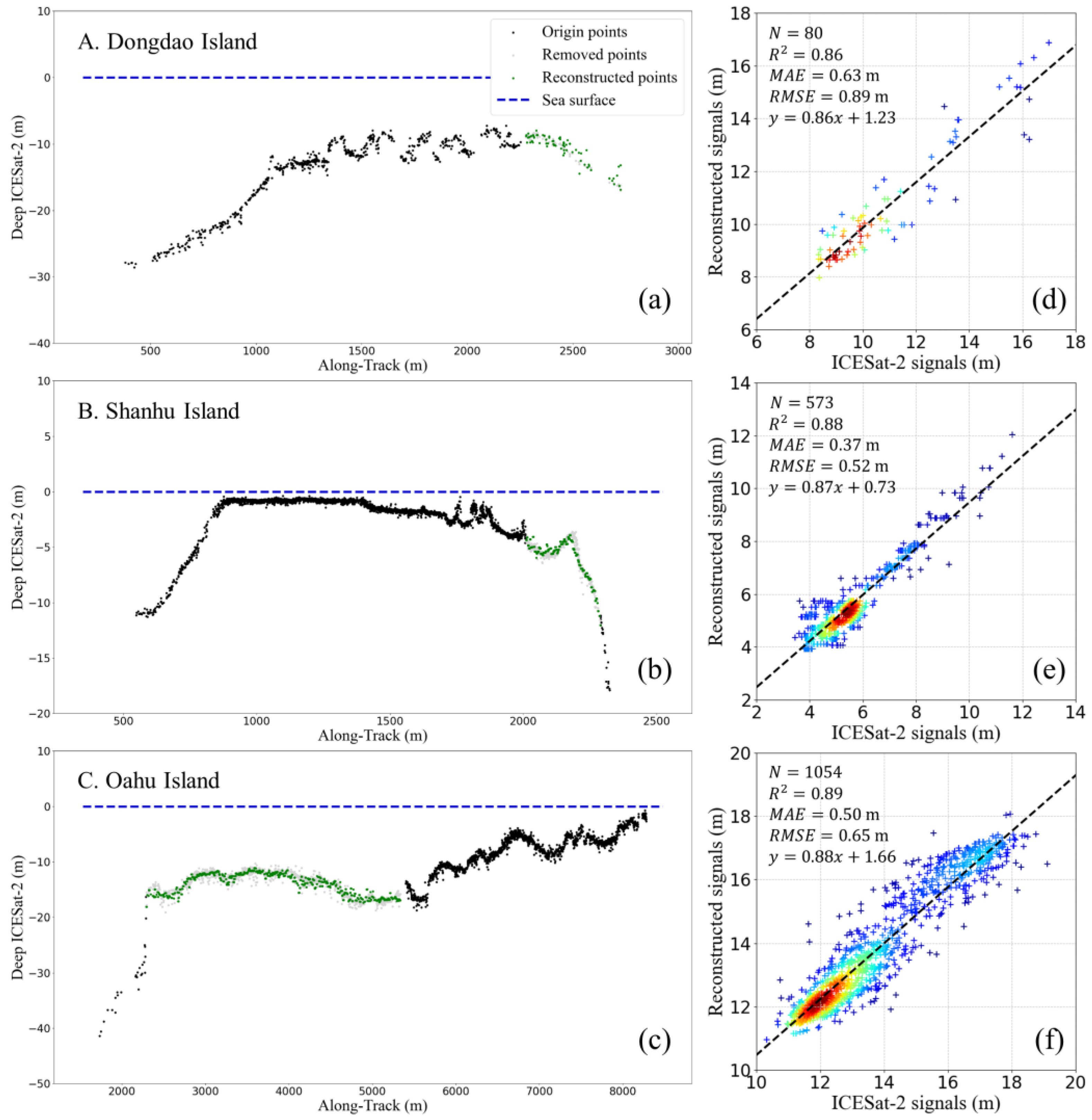
3.1. ICESat-2 Bathymetric Signal Reconstruction Deep Learning Model
3.2. The Overall Framework of ICESat-2 Bathymetric Signal Reconstruction
4. Experiments and Analysis
4.1. Experimental Settings
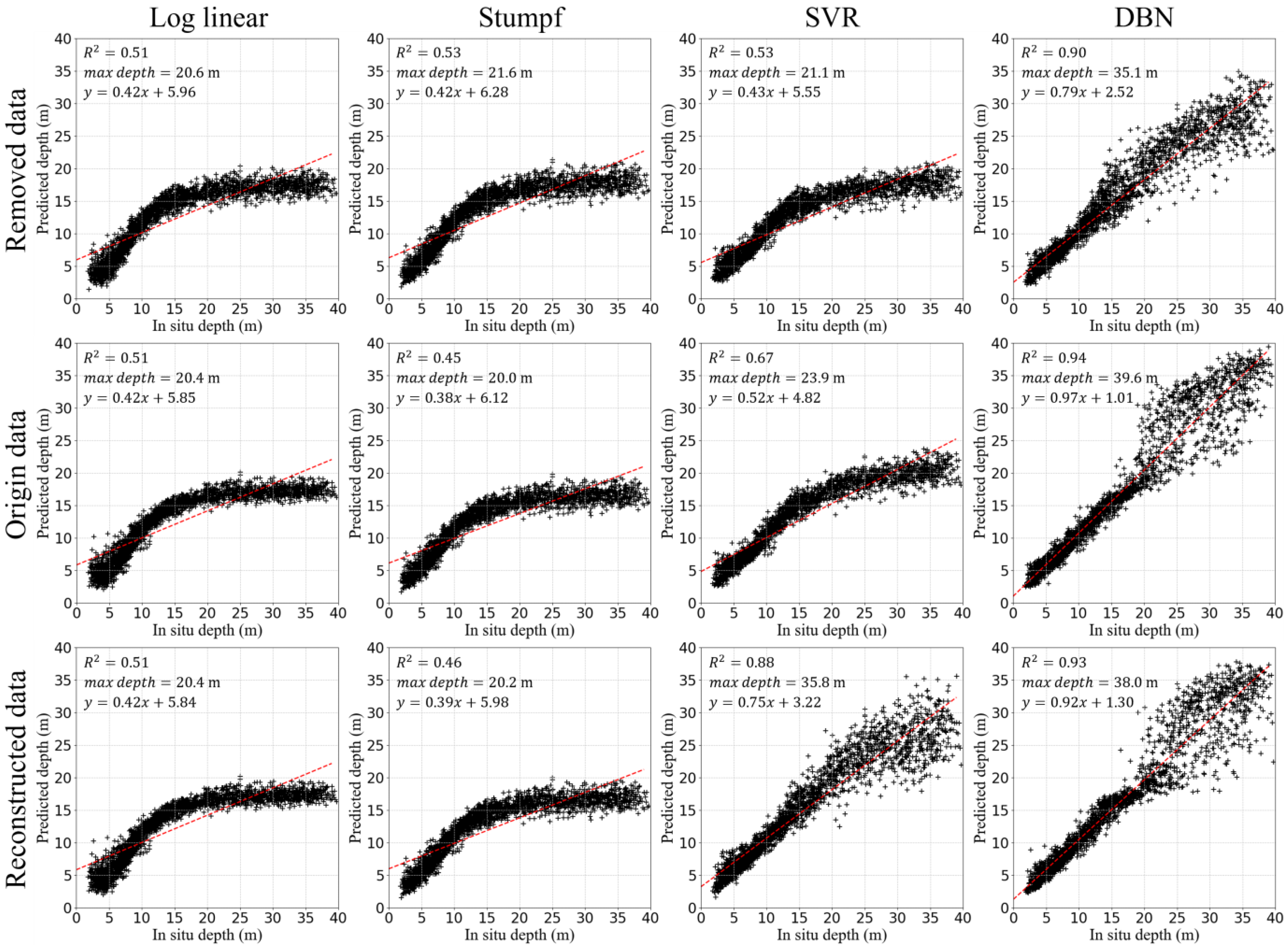
4.1.1. Inversion Models for Validation
- (1)
- Log-linear model
- (2)
- Stumpf log-ratio model
- (3)
- SVR (support-vector regression) model
- (4)
- DBN (deep belief network) model
4.1.2. Accuracy Indices
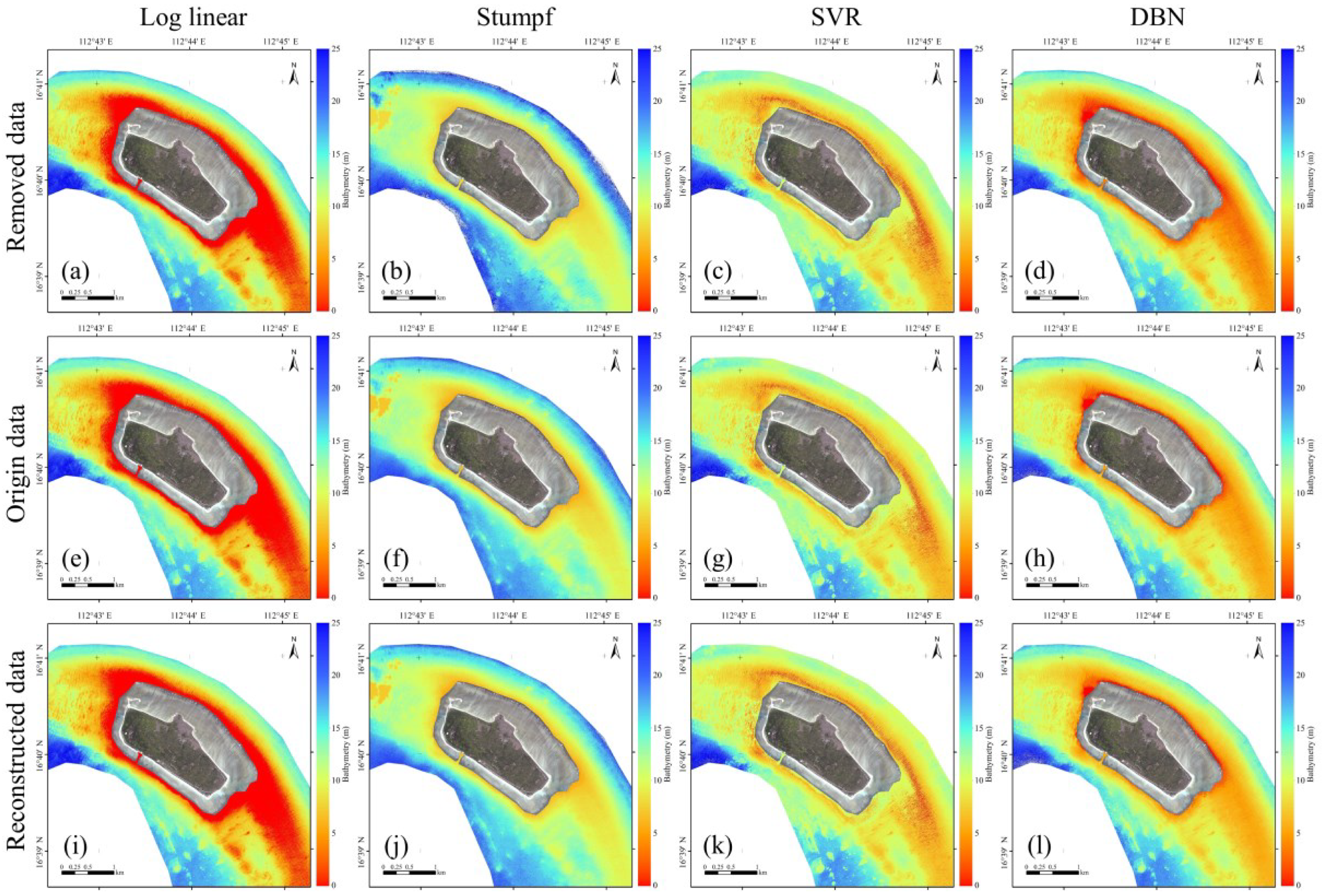
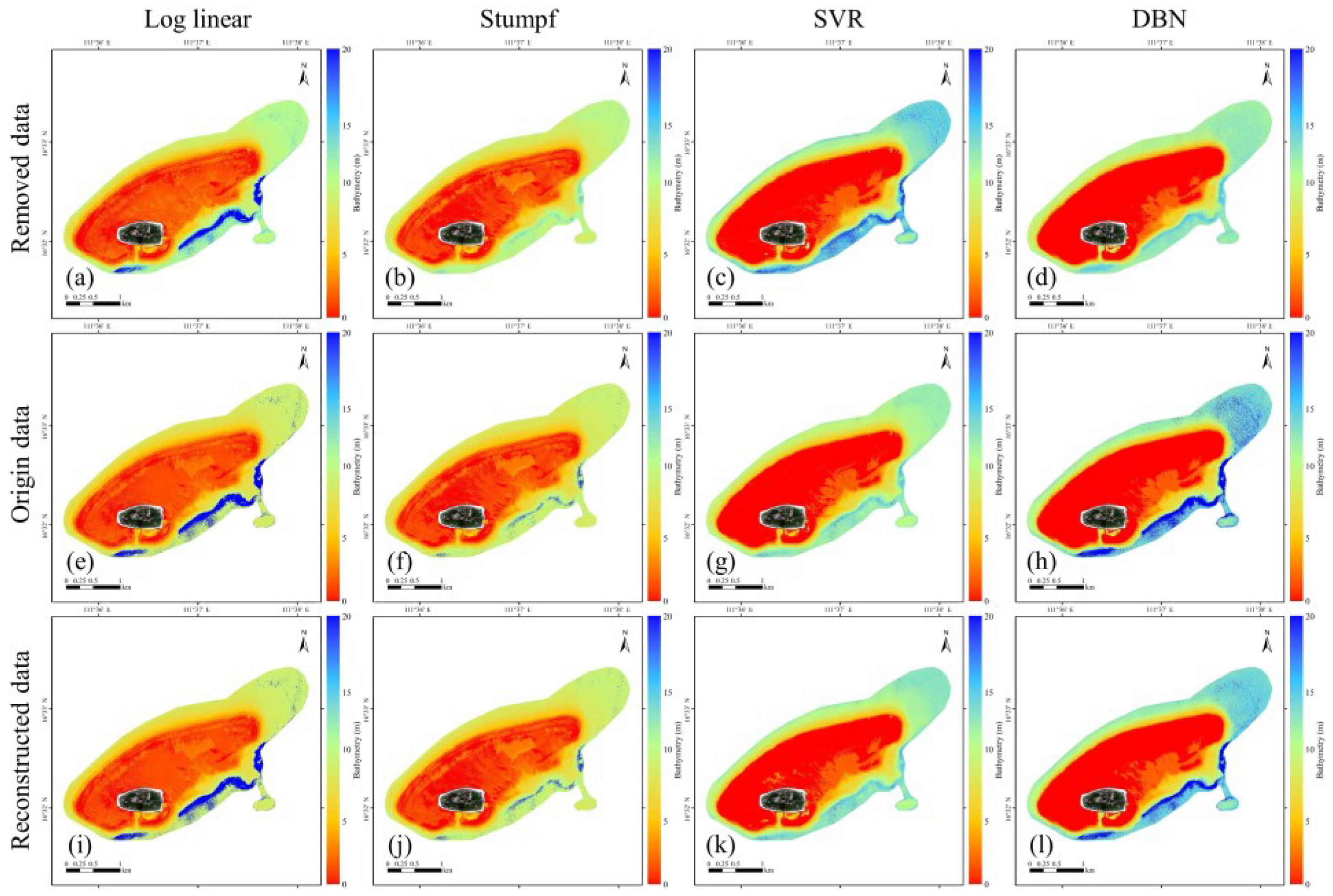
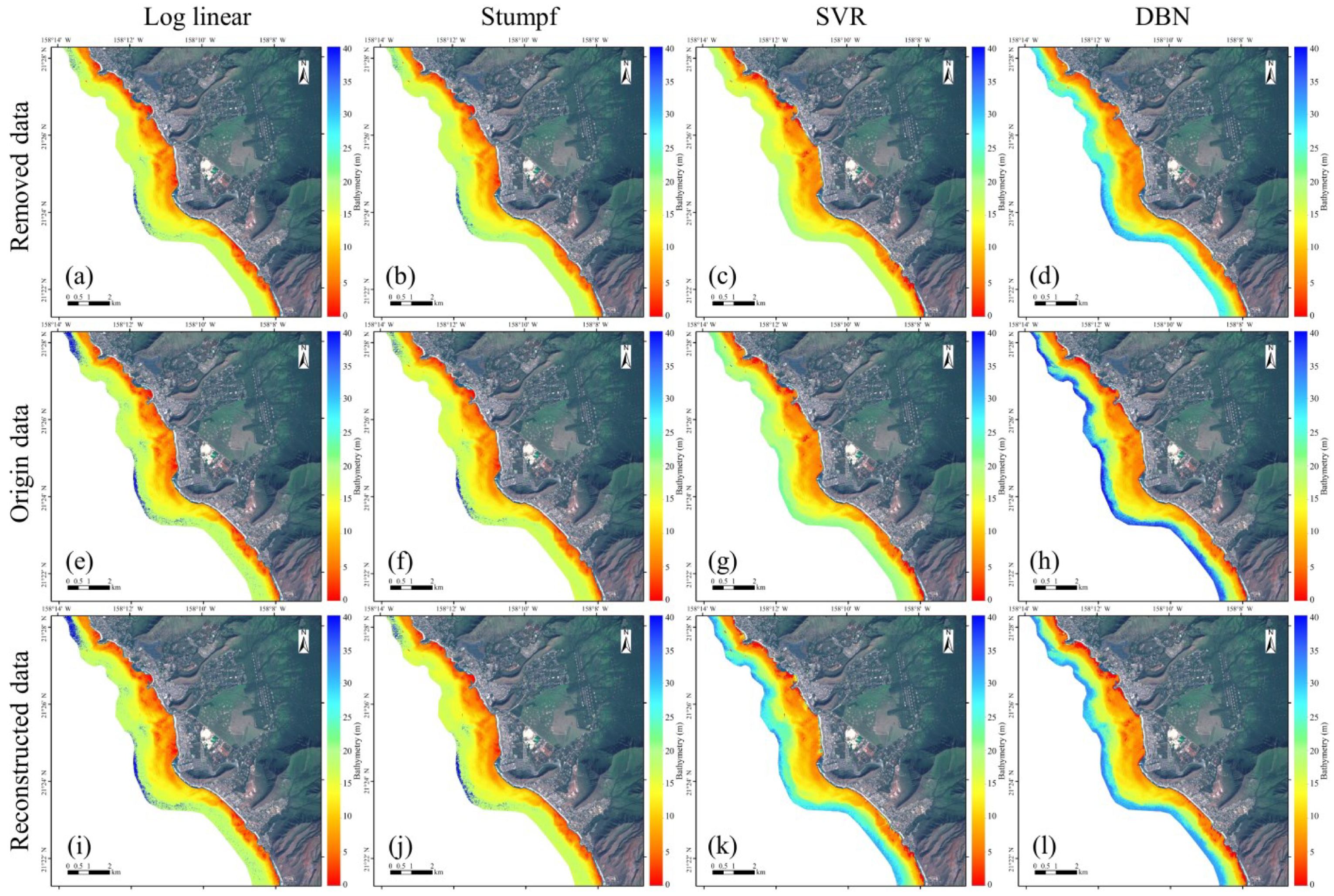
4.2. Experimental Results
5. Discussion
5.1. Impact of Remote Sensing Images’ Spatial Resolution on the Reconstruction Effect
5.2. Significance of Introducing Log-Ratio Features to Signal Reconstruction
5.3. Discussion of Model Adaptability in Active–Passive Fusion Bathymetric Inversion
5.4. Comparison of Inversion Accuracy in Local Areas near the Reconstructed Data
5.5. Discussion of Application Value
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ma, Y.; Zhang, J.; Zhang, J.; Zhang, Z.; Wang, J. Progress in shallow water depth mapping from optical remote sensing. Adv. Mar. Sci. 2018, 36, 331–351. [Google Scholar]
- Kutser, T.; Hedley, J.; Giardino, C.; Roelfsema, C.; Brando, V.E. Remote sensing of shallow waters—A 50 year retrospective and future directions. Remote Sens. Environ. 2020, 240, 111619. [Google Scholar] [CrossRef]
- Paredes, J.M.; Spero, R.E. Water depth mapping from passive remote sensing data under a generalized ratio assumption. Appl. Opt. 1983, 22, 1134–1135. [Google Scholar] [CrossRef] [PubMed]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Zhu, J.; Hu, P.; Zhao, L.; Gao, L.; Qi, J.; Zhang, Y.; Wang, R. Determine the stumpf 2003 model parameters for multispectral remote sensing shallow water bathymetry. J. Coast. Res. 2020, 102, 54–62. [Google Scholar] [CrossRef]
- Li, J.; Knapp, D.E.; Schill, S.R.; Roelfsema, C.; Phinn, S.; Silman, M.; Mascaro, J.; Asner, G.P. Adaptive bathymetry estimation for shallow coastal waters using Planet Dove satellites. Remote Sens. Environ. 2019, 232, 111302. [Google Scholar] [CrossRef]
- Leng, Z.; Zhang, J.; Ma, Y.; Zhang, J. Underwater Topography Inversion in Liaodong Shoal Based on GRU Deep Learning Model. Remote Sens. 2020, 12, 4068. [Google Scholar] [CrossRef]
- Leng, Z.; Zhang, J.; Ma, Y.; Zhang, J. Satellite Derived Active-Passive Fusion Bathymetry Based on Gru Model. In Proceedings of the IGARSS 2022–2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 7026–7029. [Google Scholar] [CrossRef]
- Lyzenga, D.R.; Malinas, N.P.; Tanis, F.J. Multispectral bathymetry using a simple physically based algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Chen, Q.; Deng, R.; Qin, Y.; He, Y.; Wang, W. Water depth extraction from remote sensing image in Feilaixia reservoir. Acta Sci. Nat. Univ. Sunyatseni 2012, 51, 122–127. [Google Scholar]
- Figueiredo, I.N.; Pinto, L.; Goncalves, G. A modified Lyzenga’s model for multispectral bathymetry using Tikhonov regularization. IEEE Geosci. Remote Sens. Lett. 2015, 13, 53–57. [Google Scholar] [CrossRef]
- Abdalati, W.; Zwally, H.J.; Bindschadler, R.; Csatho, B.; Farrell, S.L.; Fricker, H.A.; Harding, D.; Kwok, R.; Lefsky, M.; Markus, T. The ICESat-2 laser altimetry mission. Proc. IEEE 2010, 98, 735–751. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS bathymetry and analysis of ATLAS’s bathymetric mapping performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Le, Y.; Zhang, D.; Wang, Y.; Qiu, Z.; Wang, L. A photon-counting LiDAR bathymetric method based on adaptive variable ellipse filtering. Remote Sens. Environ. 2021, 256, 112326. [Google Scholar] [CrossRef]
- Leng, Z.; Zhang, J.; Ma, Y.; Zhang, J.; Zhu, H. A novel bathymetry signal photon extraction algorithm for photon-counting LiDAR based on adaptive elliptical neighborhood. Int. J. Appl. Earth Obs. Geoinf. 2022, 115, 103080. [Google Scholar] [CrossRef]
- Xie, C.; Chen, P.; Pan, D.; Zhong, C.; Zhang, Z. Improved Filtering of ICESat-2 Lidar Data for Nearshore Bathymetry Estimation Using Sentinel-2 Imagery. Remote Sens. 2021, 13, 4303. [Google Scholar] [CrossRef]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Wang, J.; Li, D.; Zhou, H. A noise removal algorithm based on OPTICS for photon-counting LiDAR data. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1471–1475. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Cao, B.; Fang, Y.; Jiang, Z.; Gao, L.; Hu, H. Water depth measurement from the fusion of ICESat-2 laser satellite and optical remote sensing image. Hydrogr. Surv. Charting 2020, 40, 21–25. [Google Scholar]
- Hsu, H.-J.; Huang, C.-Y.; Jasinski, M.; Li, Y.; Gao, H.; Yamanokuchi, T.; Wang, C.-G.; Chang, T.-M.; Ren, H.; Kuo, C.-Y. A semi-empirical scheme for bathymetric mapping in shallow water by ICESat-2 and Sentinel-2: A case study in the South China Sea. ISPRS J. Photogramm. Remote Sens. 2021, 178, 1–19. [Google Scholar] [CrossRef]
- Neumann, T.; Brenner, A.; Hancock, D.; Robbins, J.; Saba, J.; Harbeck, K.; Gibbons, A.; Lee, J.; Luthcke, S.; Rebold, T. ATLAS/ICESat-2 L2A Global Geolocated Photon Data, Version 5; NASA: Washington, DC, USA, 2021; Volume 10.
- Magruder, L.; Brunt, K.; Neumann, T.; Klotz, B.; Alonzo, M. Passive ground-based optical techniques for monitoring the on-orbit ICESat-2 altimeter geolocation and footprint diameter. Earth Space Sci. 2021, 8, e2020EA001414. [Google Scholar] [CrossRef]
- IHO. IHO Standards for Hydrographic Surveys, 6.1.0 ed.; Special Publication No. 44; International Hydrographic Organization: Monte Carlo, Monaco, 2022. [Google Scholar]
- Irish, J.L.; White, T.E. Coastal engineering applications of high-resolution lidar bathymetry. Coast. Eng. 1998, 35, 47–71. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Hinton, G.E. A practical guide to training restricted Boltzmann machines. In Neural Networks: Tricks of the Trade; Springer: Berlin/Heidelberg, Germany, 2012; pp. 599–619. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value | Name | Value |
|---|---|---|---|
| Launch date | 15 September 2018 | Wavelength | 532 nm |
| Orbit altitude | 500 km | Pulse frequency | 10 kHz |
| Repeat cycle | 91 days | Footprint diameter | ~10 m [23] |
| RGTs number | 1387 | Along-track spacing | 0.7 m |
| Satellite | Orbit Altitude | Spatial Resolution (Visible Band) | Swath Width |
|---|---|---|---|
| WorldView-2 | 770 km | 2 m | 16.4 km |
| GF-2 PMS | 631 km | 3.24 m | >45 km |
| GF-1 PMS | 645 km | 8 m | 800 km |
| Sentinel-2A | 786 km | 10 m | 290 km |
| Data/Location | Dongdao Island | Shanhu Island | Oahu Island |
|---|---|---|---|
| Latitude: 16.53°N | Latitude: 16.67°N | Latitude: 21.42°N | |
| Longitude: 111.61°E | Longitude: 112.73°E | Longitude: 158.19°W | |
| ICESat-2 data | (074301_3r) | (085702_3l) | (016006_1r) |
| Multispectral data | WorldView-2 | GF-2 PMS | Sentinel-2A |
| GF-1 PMS | |||
| GF-2 PMS | |||
| In situ data (validation) | Shipborne bathymetry | ICESat-2 points (036205_2r) | Airborne bathymetry LiDAR |
| Dongdao Island (WV2) | Shanhu Island (GF-2) | Oahu Island (Sentinal-2A) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MAE | MRE | RMSE | MAE | MRE | RMSE | MAE | MRE | ||
| Log-linear | Removed | 3.82 m | 3.10 m | 31.61% | 2.01 m | 1.35 m | 52.47% | 7.03 m | 4.36 m | 23.07% |
| Original | 3.70 m | 3.03 m | 29.54% | 2.55 m | 1.55 m | 49.54% | 7.06 m | 4.32 m | 23.22% | |
| Reconstructed | 3.71 m | 3.03 m | 29.60% | 2.54 m | 1.54 m | 49.39% | 7.02 m | 4.30 m | 23.25% | |
| Stumpf | Removed | 3.21 m | 2.61 m | 27.85% | 2.68 m | 1.65 m | 55.39% | 7.51 m | 4.61 m | 23.36% |
| Original | 2.66 m | 2.18 m | 23.36% | 2.66 m | 1.64 m | 54.93% | 7.42 m | 4.52 m | 22.55% | |
| Reconstructed | 2.66 m | 2.17 m | 23.01% | 2.63 m | 1.63 m | 55.56% | 7.34 m | 4.46 m | 22.01% | |
| SVR | Removed | 4.02 m | 2.80 m | 21.34% | 1.86 m | 1.01 m | 31.51% | 6.92 m | 4.20 m | 21.52% |
| Original | 3.90 m | 2.73 m | 20.84% | 1.83 m | 0.98 m | 30.19% | 5.77 m | 3.43 m | 18.32% | |
| Reconstructed | 3.96 m | 2.75 m | 20.86% | 1.76 m | 0.95 m | 30.50% | 3.52 m | 2.16 m | 14.89% | |
| DBN | Removed | 3.45 m | 2.60 m | 20.49% | 2.01 m | 1.21 m | 34.00% | 3.17 m | 2.00 m | 13.36% |
| Original | 3.30 m | 2.39 m | 18.12% | 1.78 m | 1.02 m | 30.03% | 3.19 m | 1.94 m | 12.94% | |
| Reconstructed | 3.17 m | 2.26 m | 17.17% | 1.71 m | 1.01 m | 29.14% | 2.96 m | 1.85 m | 12.41% | |
| Name | Spatial Resolution | RMSE | MAE | MRE |
|---|---|---|---|---|
| WorldView-2 | 2 m | 0.89 m | 0.63 m | 6.14% |
| GF-2 | 3.2 m | 0.57 m | 0.45 m | 4.43% |
| GF-1 | 8 m | 0.60 m | 0.47 m | 4.35% |
| WorldView-2 | GF-2 | GF-1 | ||||
|---|---|---|---|---|---|---|
| Without Log-Ratio Features | With Log-Ratio Features | Without Log-Ratio Features | With Log-Ratio Features | Without Log-Ratio Features | With Log-Ratio Features | |
| RMSE | 0.98 m | 0.89 m | 1.09 m | 0.57 m | 0.67 m | 0.60 m |
| MAE | 0.68 m | 0.63 m | 0.82 m | 0.45 m | 0.49 m | 0.47 m |
| MRE | 6.45% | 6.14% | 7.52% | 4.43% | 4.21% | 3.99% |
| Control Points | RMSE | MAE | MRE |
|---|---|---|---|
| Incomplete data | 2.16 m | 1.45 m | 10.07% |
| Original data | 0.99 m | 0.69 m | 4.77% |
| Reconstructed data | 1.07 m | 0.77 m | 5.47% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leng, Z.; Zhang, J.; Ma, Y.; Zhang, J. ICESat-2 Bathymetric Signal Reconstruction Method Based on a Deep Learning Model with Active–Passive Data Fusion. Remote Sens. 2023, 15, 460. https://doi.org/10.3390/rs15020460
Leng Z, Zhang J, Ma Y, Zhang J. ICESat-2 Bathymetric Signal Reconstruction Method Based on a Deep Learning Model with Active–Passive Data Fusion. Remote Sensing. 2023; 15(2):460. https://doi.org/10.3390/rs15020460
Chicago/Turabian StyleLeng, Zihao, Jie Zhang, Yi Ma, and Jingyu Zhang. 2023. "ICESat-2 Bathymetric Signal Reconstruction Method Based on a Deep Learning Model with Active–Passive Data Fusion" Remote Sensing 15, no. 2: 460. https://doi.org/10.3390/rs15020460
APA StyleLeng, Z., Zhang, J., Ma, Y., & Zhang, J. (2023). ICESat-2 Bathymetric Signal Reconstruction Method Based on a Deep Learning Model with Active–Passive Data Fusion. Remote Sensing, 15(2), 460. https://doi.org/10.3390/rs15020460