
Variations and Depth of Formation of Submesoscale Eddy Structures in Satellite Ocean Color Data in the Southwestern Region of the Peter the Great Bay

Abstract
:
1. Introduction
2. Data and Methods
2.1. Study Area
2.2. Satellite Data
2.3. In Situ Data
2.4. Determination of Contrasts and Noise in Satellite Images
- If there are numerous nearby pixels where the condition of 1 ≤ |CNR| ≤ 2 is met, it is possible to visually perceive such a structure in the case of an appropriate color scale. The selection of an optimal color scale can enhance the visibility of the structure and aid in its identification.
- The same is applicable for values |CNR| ≤ 1, if there are many such pixels, and they are located next to each other, then such a structure can be detected by modern methods of image recognition.
- And vice versa for scenarios (1) and (2): if there is only one pixel that satisfies the conditions |CNR| ≥ 1 or even |CNR| ≥ 2, it would be difficult to classify such a structure as an eddy. However, our approach to smoothing the satellite data for signal (Equation (5)) and background (Equation (6)) estimations avoids cases of random outliers of individual pixels near the eddy structure. There is an exception for situations where the size of the natural phenomenon is comparable to the size of a satellite pixel, but this is not the case in our paper.
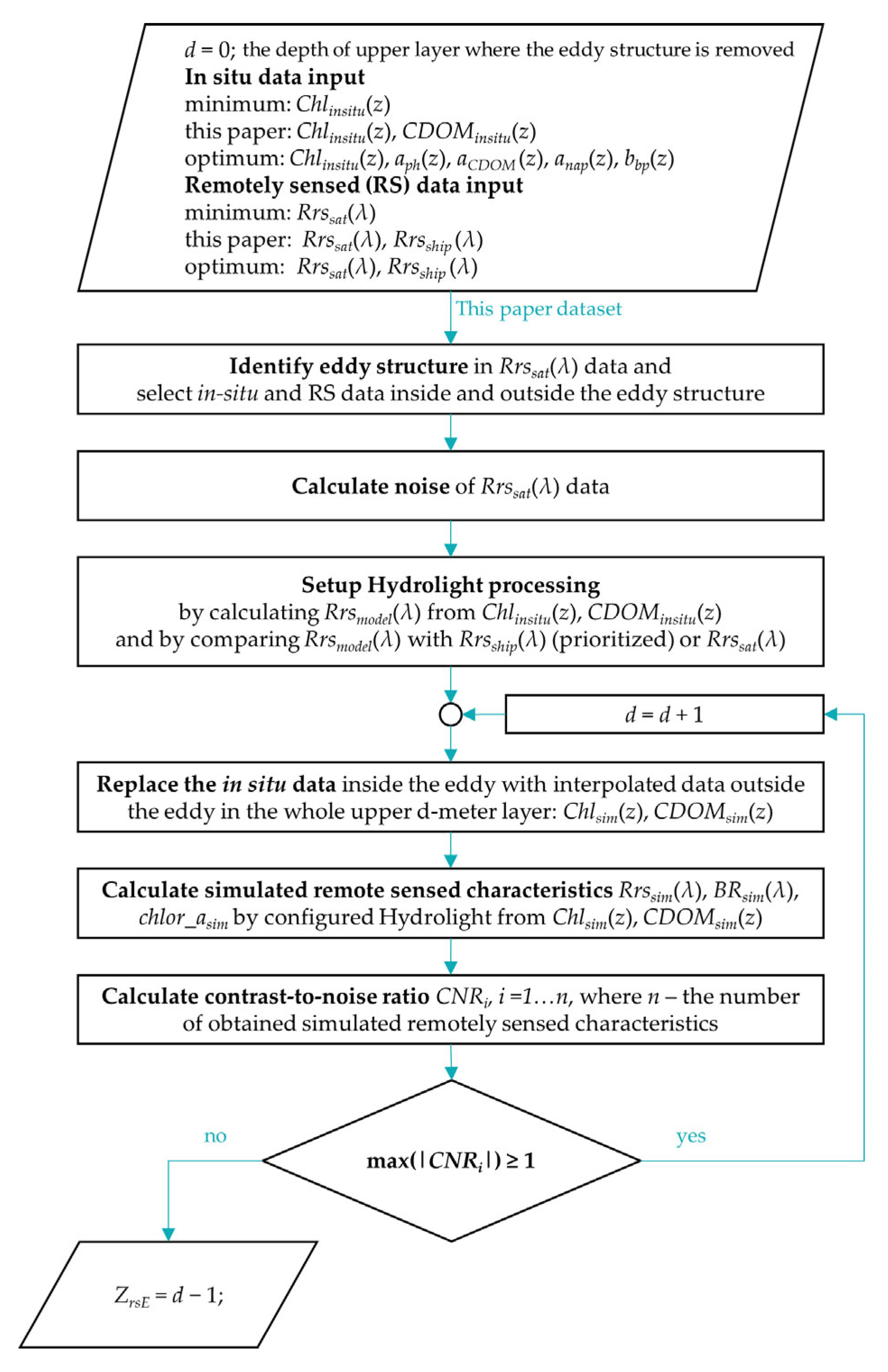
2.5. Determination of the Maximum Depth of Remotely Sensed Contrast Formation
- Obtain quasi-synchronous measurements of Rrssat(λ), Rrsship(λ) spectra, and in situ data on the vertical distribution of seawater optical properties within the eddy action region. Ideally, one would require data on the absorption coefficients and volume scattering functions of various optically active constituents, or data from which estimates of these inherent optical properties (IOPs) can be derived [56,57]. In situ data on the concentrations of the main optically active substances in seawater, such as phytoplankton, CDOM, and SSs, can also be utilized. At the very least, only the chl-a concentration is necessary if all other optical characteristics can be estimated from it.
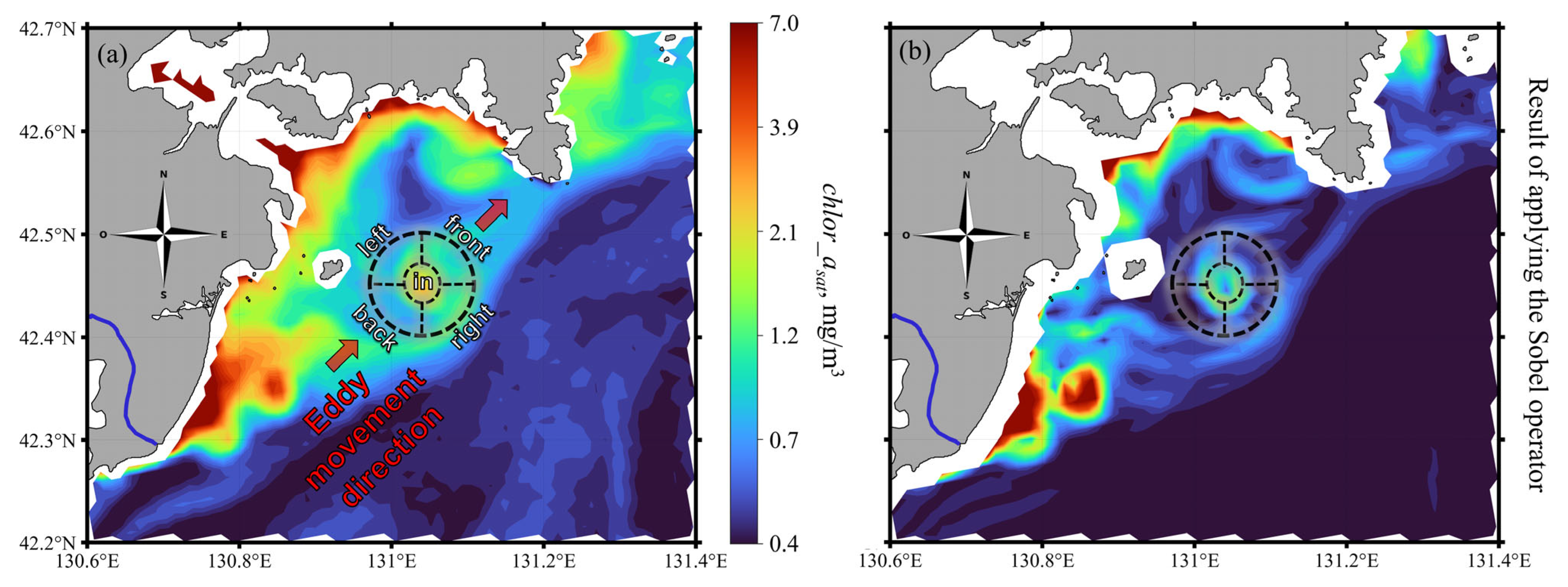
- Identify the spatial structure of the eddy in Rrssat(λ) and/or Rrsship(λ) data and define areas for signal and background detection.
- Estimate the statistical noise values of the used Rrssat(λ) satellite data.
- Set up and validate bio-geo-optical models for direct numerical simulation of Rrsmodel(λ) spectra taking into account vertical profiles of IOPs or optically active substances’ concentrations in the study area and by comparison with Rrsship(λ) and/or Rrssat(λ) measurements.
- From the results of step 4, calculate the Rrssim(λ) spectra under the simulated layer-by-layer removal of the eddy structure in the in situ data.
- From the results of step 5, calculate the spectral characteristics of Rrssim(λ), BRsim(λ), and chlor_asim.
- For each characteristic obtained in step 6, calculate the contrast-to-noise ratio CNRi. Then, repeat steps 5 and 6 in 1 m depth increments while the maximum value of all obtained CNRi values is greater than one.
- The last depth value calculated in step 7, where the condition max(|CNRi|) ≥ 1 is satisfied, is the maximum depth of the remotely sensed contrast formation of an eddy structure (ZrsE).
2.5.1. The Adaptation of Bio-Geo-Optical Models for Numerical Modeling of Rrs Spectra
2.5.2. Simulation of Layer-by-Layer Removal of the Eddy Structure
3. Results
3.1. Satellite Data Noise Estimation
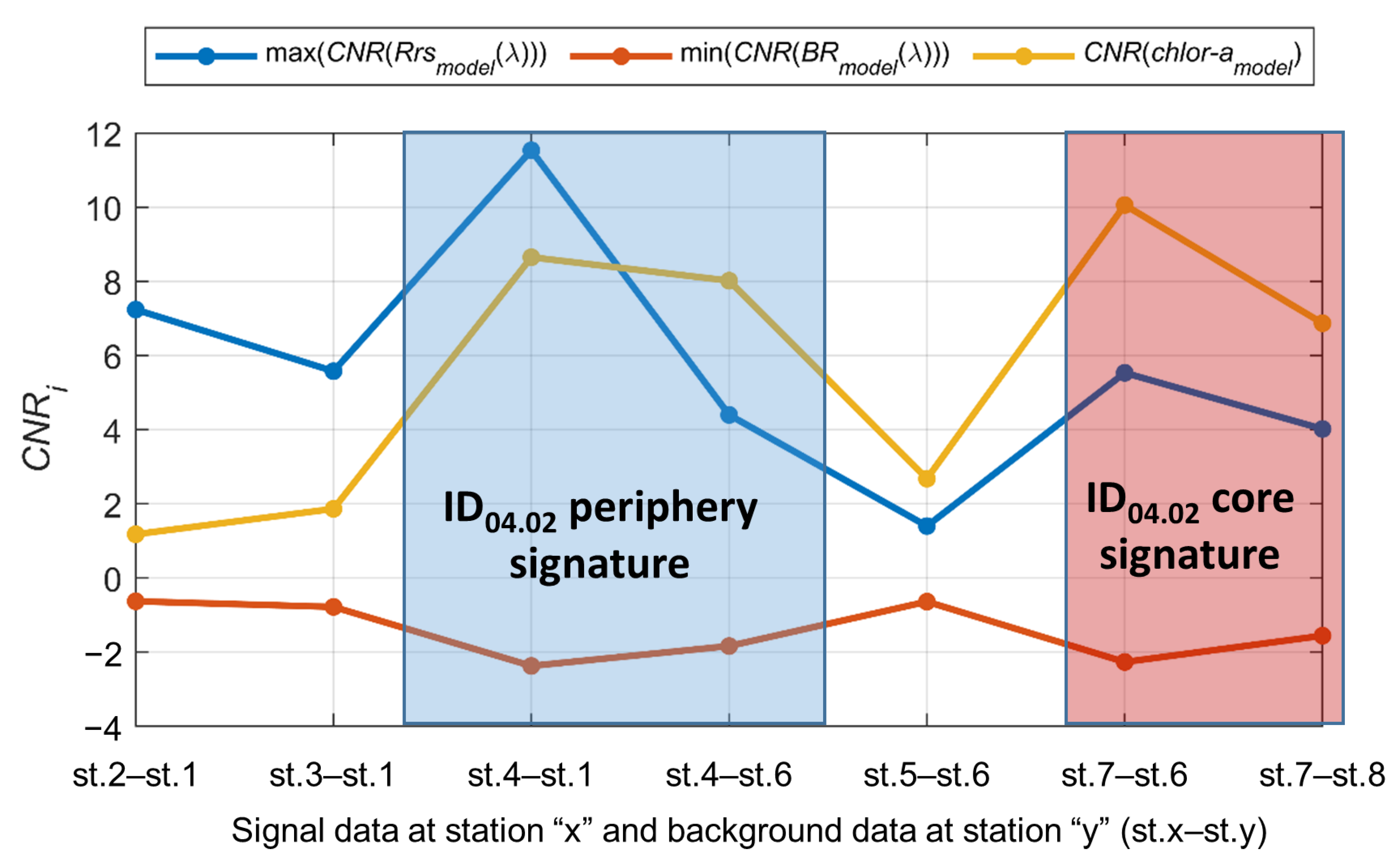
3.2. The Most Significant Contrast Optical Characteristics for Eddy Detection
3.3. The Maximum Depth of a Remotely Sensed Contrast Formation of an Eddy Structure
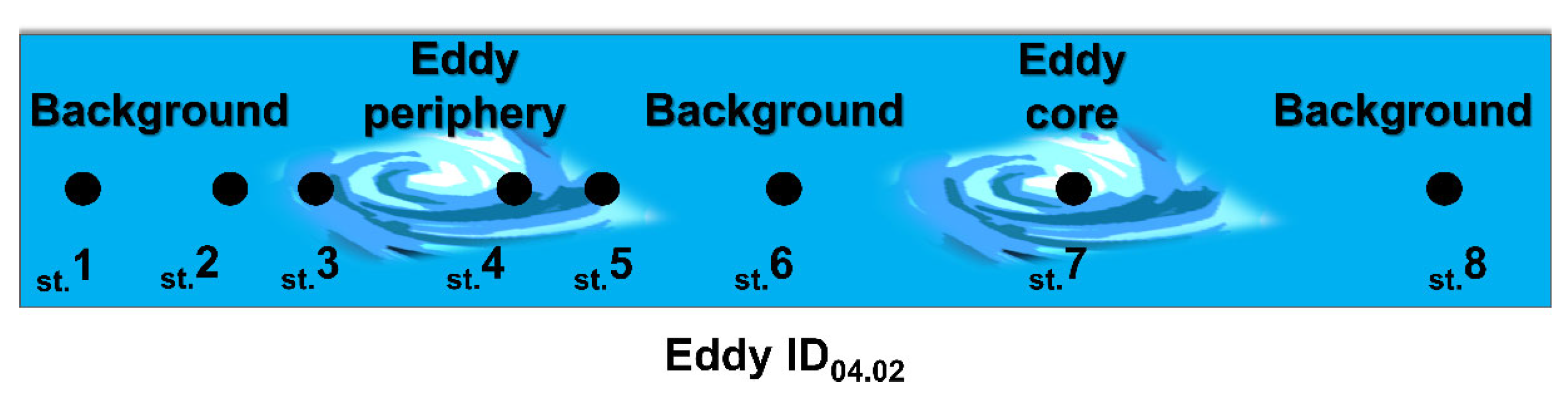
3.3.1. Comparison of In Situ and Remote Sensing Data in the Area near Eddy ID04.02
3.3.2. Estimation of the Maximum Depth of Remotely Sensed Contrast Formation
3.3.3. Comparison with Maximum Sunlight Penetration Depth for Remote Sensing
4. Discussion
4.1. Characteristics of the Contrasts
4.2. Sunlight Penetration Depth and the Maximum Depth of Remotely Sensed Contrast Formation
5. Conclusions
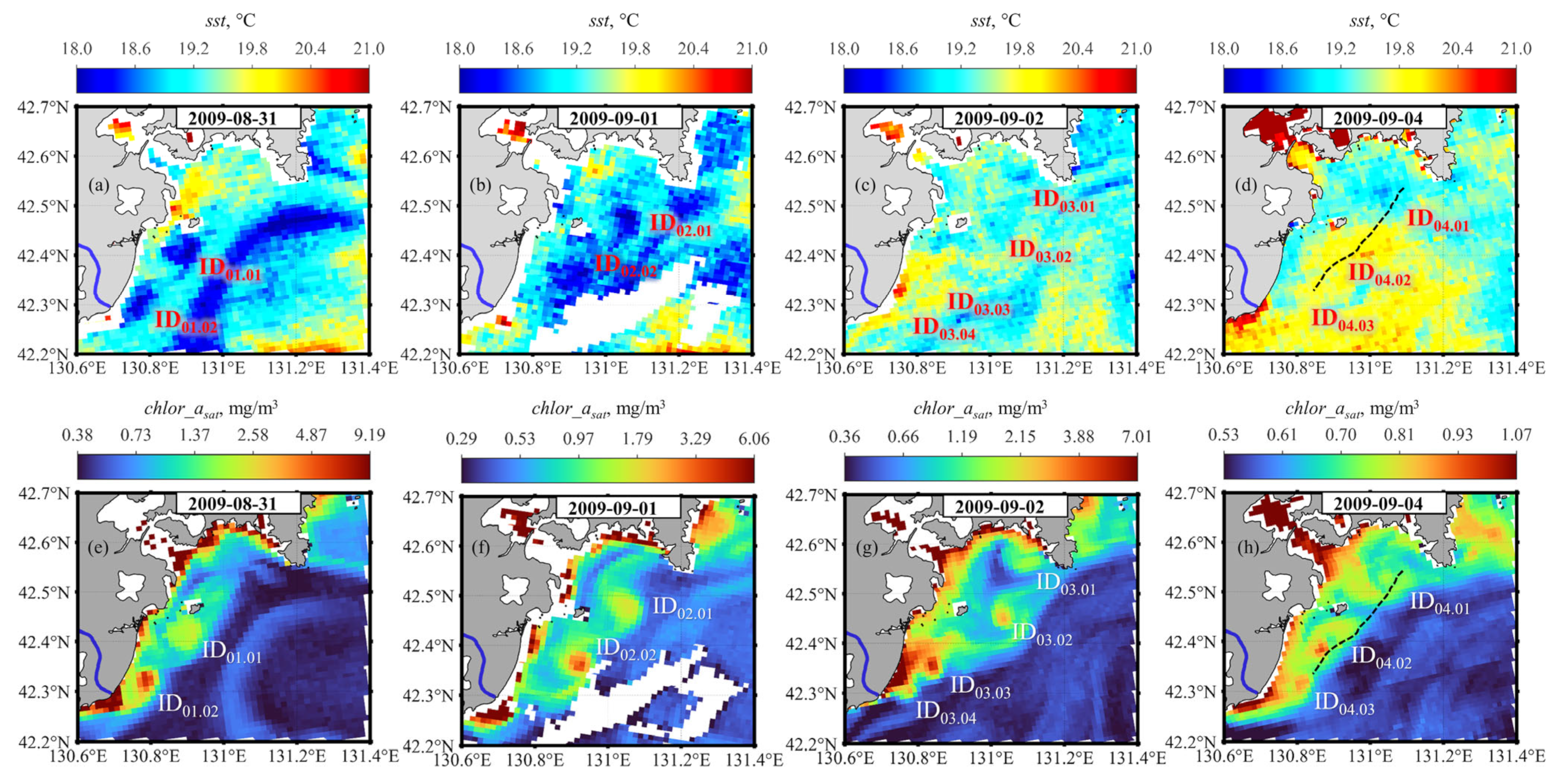
- The best parameter for detecting investigated eddies in the satellite ocean color data was the concentration of chl-a, calculated using the band-difference CI algorithm for low chl-a concentrations and band-ratio OC algorithm for high chl-concentrations. The application of such bio-optical algorithms had the effect of enhancing the significance of contrast due to reduction in the noise at background values of chl-a concentrations less than 0.35 mg/m3. At the same time, the weakest contrasts were in sst data due to the similar heating of sea and river waters involved in the eddy.
- The best contrast-to-noise ratio according to Rrs spectra for the investigated eddies is achieved at a wavelength of 547 nm near the seawater maximum transparency and in the spectral region of low relative errors of satellite ocean color data. The increased contrast values at this wavelength can be related both to the greater variability in the light backscattering by optically active substances contained in the eddy and due to the different penetration depth of solar radiation inside and outside the eddy.
- The Rrs(678) value and associated products can be highly significant characteristics for eddy detection if the eddy waters are reached by phytoplankton. The corresponding contrasts inside and outside the eddy will depend on the influence of both the variability of the backscattering and absorption signals of optically active substances and the sun-induced fluorescence signals of phytoplankton cells in the eddy structure.
- When the Rrs spectra are normalized to Rrs(555), the eddy contrasts become less significant, but the eddy structure itself can be clearer by reducing the influence of non-hydrodynamic effects on the measurement results. A good characteristic in this case for the calculation of CNR is Rrs(443)/Rrs(555), variations of which primary depend on the combined effect of phytoplankton and CDOM absorption, and relative statistical noise level is acceptable.
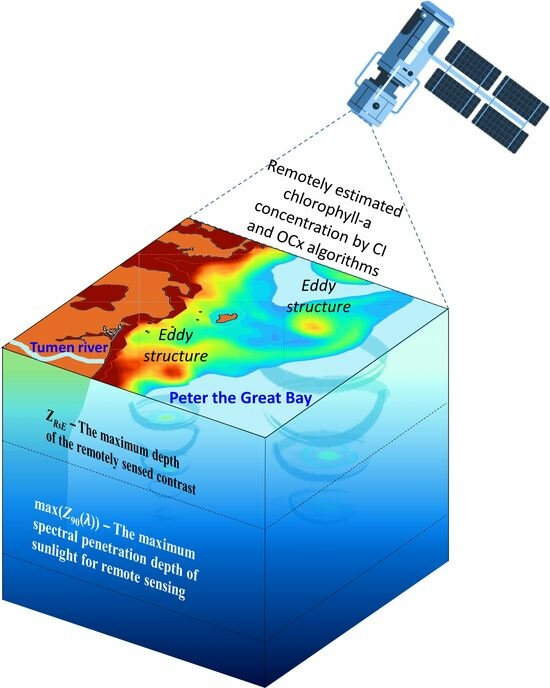
- The maximum depth of contrast formation (ZrsE) of the considered eddy vertical structure ID04.02 was 6 m, which is significantly less than the maximum spectral penetration depth of solar radiation for remote sensing , which was in the range of 14–17 m in the eddy area. Probably, a smaller value of ZrsE compared to can be a typical situation not only for the considered eddy.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- McWilliams, J.C. Submesoscale Currents in the Ocean. Proc. R. Soc. Math. Phys. Eng. Sci. 2016, 472, 20160117. [Google Scholar] [CrossRef] [PubMed]
- Zatsepin, A.; Kubryakov, A.; Aleskerova, A.; Elkin, D.; Kukleva, O. Physical Mechanisms of Submesoscale Eddies Generation: Evidences from Laboratory Modeling and Satellite Data in the Black Sea. Ocean Dyn. 2019, 69, 253–266. [Google Scholar] [CrossRef]
- Mahadevan, A. The Impact of Submesoscale Physics on Primary Productivity of Plankton. Annu. Rev. Mar. Sci. 2016, 8, 161–184. [Google Scholar] [CrossRef]
- Damien, P.; Bianchi, D.; Kessouri, F.; McWilliams, J.C. Modulation of Phytoplankton Uptake by Mesoscale and Submesoscale Eddies in the California Current System. Geophys. Res. Lett. 2023, 50, e2023GL104853. [Google Scholar] [CrossRef]
- Smith, K.M.; Hamlington, P.E.; Fox-Kemper, B. Effects of Submesoscale Turbulence on Ocean Tracers. J. Geophys. Res. Oceans 2016, 121, 908–933. [Google Scholar] [CrossRef]
- Fayman, P.A.; Salyuk, P.A.; Budyansky, M.V.; Burenin, A.V.; Didov, A.A.; Lipinskaya, N.A.; Ponomarev, V.I.; Udalov, A.A.; Morgunov, Y.N.; Uleysky, M.Y.; et al. Transport of the Tumen River Water to the Far Eastern Marine Reserve (Posyet Bay) Based on in Situ, Satellite Data and Lagrangian Modeling Using ROMS Current Velocity Output. Mar. Pollut. Bull. 2023, 194, 115414. [Google Scholar] [CrossRef] [PubMed]
- Su, Z.; Wang, J.; Klein, P.; Thompson, A.F.; Menemenlis, D. Ocean Submesoscales as a Key Component of the Global Heat Budget. Nat. Commun. 2018, 9, 775. [Google Scholar] [CrossRef] [PubMed]
- Friedrichs, D.M.; McInerney, J.B.T.; Oldroyd, H.J.; Lee, W.S.; Yun, S.; Yoon, S.-T.; Stevens, C.L.; Zappa, C.J.; Dow, C.F.; Mueller, D.; et al. Observations of Submesoscale Eddy-Driven Heat Transport at an Ice Shelf Calving Front. Commun. Earth Environ. 2022, 3, 140. [Google Scholar] [CrossRef]
- Kumar, A.; Mishra, V.; Panigrahi, R.K.; Martorella, M. Application of Hybrid-Pol SAR in Oil-Spill Detection. IEEE Geosci. Remote Sens. Lett. 2023, 20, 4004505. [Google Scholar] [CrossRef]
- Soldal, I.; Dierking, W.; Korosov, A.; Marino, A. Automatic Detection of Small Icebergs in Fast Ice Using Satellite Wide-Swath SAR Images. Remote Sens. 2019, 11, 806. [Google Scholar] [CrossRef]
- Mitnik, L.M.; Lobanov, V.B. Reflection of the Oceanic Fronts on the Satellite Radar Images. In Elsevier Oceanography Series; Elsevier: Amsterdam, The Netherlands, 1991; Volume 54, pp. 85–101. ISBN 978-0-444-88805-1. [Google Scholar]
- Ivanov, A.Y.; Ginzburg, A.I. Oceanic Eddies in Synthetic Aperture Radar Images. J. Earth Syst. Sci. 2002, 111, 281–295. [Google Scholar] [CrossRef]
- Bulatov, M.G.; Kravtsov, Y.A.; Lavrova, O.Y.; Litovchenko, K.T.; Mityagina, M.I.; Raev, M.D.; Sabinin, K.D.; Trokhimovskii, Y.G.; Churyumov, A.N.; Shugan, I.V. Physical Mechanisms of Aerospace Radar Imaging of the Ocean. Phys.-Uspekhi 2003, 46, 63–79. [Google Scholar] [CrossRef]
- Xia, L.; Chen, G.; Chen, X.; Ge, L.; Huang, B. Submesoscale Oceanic Eddy Detection in SAR Images Using Context and Edge Association Network. Front. Mar. Sci. 2022, 9, 1023624. [Google Scholar] [CrossRef]
- Huang, C.; Zeng, L.; Wang, D.; Wang, Q.; Wang, P.; Zu, T. Submesoscale Eddies in Eastern Guangdong Identified Using High-Frequency Radar Observations. Deep Sea Res. Part II Top. Stud. Oceanogr. 2023, 207, 105220. [Google Scholar] [CrossRef]
- Li, G.; He, Y.; Liu, G.; Zhang, Y.; Hu, C.; Perrie, W. Multi-Sensor Observations of Submesoscale Eddies in Coastal Regions. Remote Sens. 2020, 12, 711. [Google Scholar] [CrossRef]
- Kostianoy, A.G.; Ginzburg, A.I.; Lavrova, O.Y.; Mityagina, M.I. Satellite Remote Sensing of Submesoscale Eddies in the Russian Seas. In The Ocean in Motion; Velarde, M.G., Tarakanov, R.Y., Marchenko, A.V., Eds.; Springer Oceanography; Springer International Publishing: Cham, Switzerland, 2018; pp. 397–413. ISBN 978-3-319-71933-7. [Google Scholar]
- Hu, C.; Lee, Z.; Franz, B. Chlorophyll a Algorithms for Oligotrophic Oceans: A Novel Approach Based on Three-Band Reflectance Difference: A novel ocean chlorophyll a algorithm. J. Geophys. Res. Oceans 2012, 117, C01011. [Google Scholar] [CrossRef]
- Li, Q.; Jiang, L.; Chen, Y.; Wang, L.; Wang, L. Evaluation of Seven Atmospheric Correction Algorithms for OLCI Images over the Coastal Waters of Qinhuangdao in Bohai Sea. Reg. Stud. Mar. Sci. 2022, 56, 102711. [Google Scholar] [CrossRef]
- Zaneveld, J.R.V.; Barnard, A.H.; Boss, E. Theoretical Derivation of the Depth Average of Remotely Sensed Optical Parameters. Opt. Express 2005, 13, 9052. [Google Scholar] [CrossRef]
- Ladychenko, S.Y.; Lobanov, V.B. Mesoscale Eddies in the Area of Peter the Great Bay According to Satellite Data. Izv. Atmospheric Ocean. Phys. 2013, 49, 939–951. [Google Scholar] [CrossRef]
- Aleksanina, M.G.; Eremenko, A.S.; Zagumennov, A.A.; Kachur, V.A. Eddies in the Ocean and Atmosphere: Identification by Satellite Imagery. Russ. Meteorol. Hydrol. 2016, 41, 620–628. [Google Scholar] [CrossRef]
- Morozov, E.A.; Kozlov, I.E. Eddies in the Arctic Ocean Revealed from MODIS Optical Imagery. Remote Sens. 2023, 15, 1608. [Google Scholar] [CrossRef]
- Ni, Q.; Zhai, X.; Wilson, C.; Chen, C.; Chen, D. Submesoscale Eddies in the South China Sea. Geophys. Res. Lett. 2021, 48, e2020GL091555. [Google Scholar] [CrossRef]
- Park, K.-A.; Woo, H.-J.; Ryu, J.-H. Spatial Scales of Mesoscale Eddies from GOCI Chlorophyll-a Concentration Images in the East/Japan Sea. Ocean Sci. J. 2012, 47, 347–358. [Google Scholar] [CrossRef]
- Kubryakov, A.A.; Lishaev, P.N.; Chepyzhenko, A.I.; Aleskerova, A.A.; Kubryakova, E.A.; Medvedeva, A.V.; Stanichny, S.V. Impact of Submesoscale Eddies on the Transport of Suspended Matter in the Coastal Zone of Crimea Based on Drone, Satellite, and In Situ Measurement Data. Oceanology 2021, 61, 159–172. [Google Scholar] [CrossRef]
- Gurova, E.; Chubarenko, B. Remote-sensing observations of coastal sub-mesoscale eddies in the south-eastern Baltic. Oceanologia 2012, 54, 631–654. [Google Scholar] [CrossRef]
- Latushkin, A.A.; Ponomarev, V.I.; Salyuk, P.A.; Frey, D.I.; Lipinskaya, N.A.; Shkorba, S.P. Distribution of Optical and Hydrological Characteristics in the Antarctic Sound Based on the Measurements in January, 2022 in the 87th Cruise of the R/V “Akademik Mstislav Keldysh”. Phys. Oceanogr. 2023, 30, 47–61. [Google Scholar]
- Dierssen, H.M. Perspectives on Empirical Approaches for Ocean Color Remote Sensing of Chlorophyll in a Changing Climate. Proc. Natl. Acad. Sci. USA 2010, 107, 17073–17078. [Google Scholar] [CrossRef]
- Salyuk, P.; Bukin, O.; Alexanin, A.; Pavlov, A.; Mayor, A.; Shmirko, K.; Akmaykin, D.; Krikun, V. Optical Properties of Peter the Great Bay Waters Compared with Satellite Ocean Colour Data. Int. J. Remote Sens. 2010, 31, 4651–4664. [Google Scholar] [CrossRef]
- Niewiadomska, K.; Claustre, H.; Prieur, L.; d’Ortenzio, F. Submesoscale Physical-Biogeochemical Coupling across the Ligurian Current (Northwestern Mediterranean) Using a Bio-Optical Glider. Limnol. Oceanogr. 2008, 53, 2210–2225. [Google Scholar] [CrossRef]
- Karabashev, G.S.; Evdoshenko, M.A.; Sheberstov, S.V. Analysis of the Manifestation of Mesoscale Water Exchange in Satellite Images of the Sea Surface. Oceanology 2005, 45, 168–178. [Google Scholar]
- Prants, S.V.; Fayman, P.A.; Budyansky, M.V.; Uleysky, M.Y. Simulation of Winter Deep Slope Convection in Peter the Great Bay (Japan Sea). Fluids 2022, 7, 134. [Google Scholar] [CrossRef]
- Dubina, V.A.; Fayman, P.A.; Ponomarev, V.I. Vortex structure of currents in Peter the Great Bay. Izv. TINRO 2013, 173, 247–258. [Google Scholar]
- Tian, W.; Yu, M.; Wang, G.; Guo, C. Pollution Trend in the Tumen River and Its Influence on Regional Development. Chin. Geogr. Sci. 1999, 9, 146–150. [Google Scholar] [CrossRef]
- Tkalin, A.V.; Shapovalov, E.N. Influence of Typhoon Judy on Chemistry and Pollution of the Japan Sea Coastal Waters near the Tumangan River Mouth. Ocean Polar Res. 1991, 13, 95–101. [Google Scholar]
- Wang, S.; Wang, D.; Yang, X. Urbanization and Its Impacts on Water Environment in Tumen River Basin. Chin. Geogr. Sci. 2002, 12, 273–281. [Google Scholar] [CrossRef]
- Tishchenko, P.Y.; Tishchenko, P.P.; Lobanov, V.B.; Mikhaylik, T.A.; Sergeev, A.F.; Semkin, P.Y.; Shvetsova, M.G. Impact of the Transboundary Razdolnaya and Tumannaya Rivers on Deoxygenation of the Peter the Great Bay (Sea of Japan). Estuar. Coast. Shelf Sci. 2020, 239, 106731. [Google Scholar] [CrossRef]
- Chizhova, T.; Koudryashova, Y.; Prokuda, N.; Tishchenko, P.; Hayakawa, K. Polycyclic Aromatic Hydrocarbons in the Estuaries of Two Rivers of the Sea of Japan. Int. J. Environ. Res. Public. Health 2020, 17, 6019. [Google Scholar] [CrossRef]
- Tishchenko, P.Y.; Semkin, P.Y.; Pavlova, G.Y.; Tishchenko, P.P.; Lobanov, V.B.; Marjash, A.A.; Mikhailik, T.A.; Sagalaev, S.G.; Sergeev, A.F.; Tibenko, E.Y.; et al. Hydrochemistry of the Tumen River Estuary, Sea of Japan. Oceanology 2018, 58, 175–186. [Google Scholar] [CrossRef]
- Shtraikhert, E.A.; Zakharkov, S.P.; Lazaryuk, A.Y. Application of Satellite Observations to Study the Changes of Hypoxic Conditions in Near-Bottom Water in the Western Part of Peter the Great Bay (the Sea of Japan). Adv. Space Res. 2021, 67, 1284–1302. [Google Scholar] [CrossRef]
- Kilpatrick, K.A.; Podestá, G.; Walsh, S.; Williams, E.; Halliwell, V.; Szczodrak, M.; Brown, O.B.; Minnett, P.J.; Evans, R. A Decade of Sea Surface Temperature from MODIS. Remote Sens. Environ. 2015, 165, 27–41. [Google Scholar] [CrossRef]
- Hu, C.; Feng, L.; Lee, Z.; Franz, B.A.; Bailey, S.W.; Werdell, P.J.; Proctor, C.W. Improving Satellite Global Chlorophyll a Data Products Through Algorithm Refinement and Data Recovery. J. Geophys. Res. Oceans 2019, 124, 1524–1543. [Google Scholar] [CrossRef]
- O’Reilly, J.E.; Werdell, P.J. Chlorophyll Algorithms for Ocean Color Sensors—OC4, OC5 & OC6. Remote Sens. Environ. 2019, 229, 32–47. [Google Scholar] [CrossRef] [PubMed]
- Chlorophyll a (Chlor_a). Available online: https://oceancolor.gsfc.nasa.gov/resources/atbd/chlor_a/ (accessed on 18 September 2023).
- Nagornyi, I.G.; Salyuk, P.A.; Maior, A.Y.; Doroshenkov, I.M. A Mobile Complex for On-Line Studying Water Areas and Surface Atmosphere. Instrum. Exp. Tech. 2014, 57, 68–71. [Google Scholar] [CrossRef]
- Mueller, J.L.; Morel, A.; Frouin, R.; Davis, C.; Arnone, R.; Carder, K.; Lee, Z.P.; Steward, R.G.; Hooker, S.; Mobley, C.D.; et al. Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 4. Volume III: Radiometric Measurements and Data Analysis Protocols; Goddard Space Flight Space Center: Greenbelt, MD, USA, 2003. [Google Scholar] [CrossRef]
- Salyuk, P.A.; Stepochkin, I.E.; Sokolova, E.B.; Pugach, S.P.; Kachur, V.A.; Pipko, I.I. Developing and Using Empirical Bio-Optical Algorithms in the Western Part of the Bering Sea in the Late Summer Season. Remote Sens. 2022, 14, 5797. [Google Scholar] [CrossRef]
- Welvaert, M.; Rosseel, Y. On the Definition of Signal-To-Noise Ratio and Contrast-To-Noise Ratio for fMRI Data. PLoS ONE 2013, 8, e77089. [Google Scholar] [CrossRef]
- Matkovic, K.; Neumann, L.; Neumann, A.; Psik, T.; Purgathofer, W. Global Contrast Factor—A New Approach to Image Contrast. Comput. Aesthet. Graph. 2005, 9, 159–167. [Google Scholar] [CrossRef]
- Bourne, R. Fundamentals of Digital Imaging in Medicine; Springer: London, UK, 2010; ISBN 978-1-84882-086-9. [Google Scholar]
- Lee, J.S.; Hoppel, K. Noise Modeling and Estimation of Remotely-Sensed Images. In Proceedings of the 12th Canadian Symposium on Remote Sensing Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 10–14 July 1989; IEEE: New York, NY, USA, 1989; pp. 1005–1008. [Google Scholar]
- Gao, B.-C. An Operational Method for Estimating Signal to Noise Ratios from Data Acquired with Imaging Spectrometers. Remote Sens. Environ. 1993, 43, 23–33. [Google Scholar] [CrossRef]
- Gordon, H.R.; McCluney, W.R. Estimation of the Depth of Sunlight Penetration in the Sea for Remote Sensing. Appl. Opt. 1975, 14, 413. [Google Scholar] [CrossRef]
- Morel, A.; Antoine, D.; Gentili, B. Bidirectional Reflectance of Oceanic Waters: Accounting for Raman Emission and Varying Particle Scattering Phase Function. Appl. Opt. 2002, 41, 6289. [Google Scholar] [CrossRef]
- Mobley, C.D. Light and Water: Radiative Transfer in Natural Waters; Academic Press: San Diego, CA, USA, 1994; ISBN 978-0-12-502750-2. [Google Scholar]
- Glukhovets, D.; Sheberstov, S.; Vazyulya, S.; Yushmanova, A.; Salyuk, P.; Sahling, I.; Aglova, E. Influence of the Accuracy of Chlorophyll-Retrieval Algorithms on the Estimation of Solar Radiation Absorbed in the Barents Sea. Remote Sens. 2022, 14, 4995. [Google Scholar] [CrossRef]
- Hedley, J.D.; Mobley, C.D. Hydrolight 6.0, Ecolight 6.0 Users’ Guide; Numerical Optics Ltd.: Tiverton, UK, 2019. [Google Scholar]
- Tonizzo, A.; Twardowski, M.; McLean, S.; Voss, K.; Lewis, M.; Trees, C. Closure and Uncertainty Assessment for Ocean Color Reflectance Using Measured Volume Scattering Functions and Reflective Tube Absorption Coefficients with Novel Correction for Scattering. Appl. Opt. 2017, 56, 130. [Google Scholar] [CrossRef]
- Gordon, H.R. Atmospheric Correction of Ocean Color Imagery in the Earth Observing System Era. J. Geophys. Res. Atmos. 1997, 102, 17081–17106. [Google Scholar] [CrossRef]
- Aleksanin, A.I.; Kachur, V.A. Specificity of Atmospheric Correction of Satellite Data on Ocean Color in the Far East. Izv. Atmos. Ocean Phys. 2017, 53, 996–1006. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, J.; Chen, G. Euphotic Zone Depth Anomaly in Global Mesoscale Eddies by Multi-Mission Fusion Data. Remote Sens. 2023, 15, 1062. [Google Scholar] [CrossRef]
- Reghunath, A.T.; Venkataramanan, V.; Suviseshamuthu, D.V.; Krishnamohan, R.; Prasad, B.R. The Origin of Blue-Green Window and the Propagation of Radiation in Ocean Waters. Def. Sci. J. 1991, 41, 1–20. [Google Scholar] [CrossRef]
- Gordon, H.R.; Brown, O.B.; Evans, R.H.; Brown, J.W.; Smith, R.C.; Baker, K.S.; Clark, D.K. A Semianalytic Radiance Model of Ocean Color. J. Geophys. Res. Atmos. 1988, 93, 10909–10924. [Google Scholar] [CrossRef]
- Blondeau-Patissier, D.; Gower, J.F.R.; Dekker, A.G.; Phinn, S.R.; Brando, V.E. A Review of Ocean Color Remote Sensing Methods and Statistical Techniques for the Detection, Mapping and Analysis of Phytoplankton Blooms in Coastal and Open Oceans. Prog. Oceanogr. 2014, 123, 123–144. [Google Scholar] [CrossRef]
- Xing, X.-G.; Zhao, D.-Z.; Liu, Y.-G.; Yang, J.-H.; Xiu, P.; Wang, L. An Overview of Remote Sensing of Chlorophyll Fluorescence. Ocean Sci. J. 2007, 42, 49–59. [Google Scholar] [CrossRef]
- Kopelevich, O.V.; Burenkov, V.I. Relation between the Spectral Values of the Light Absorption Coefficients of Sea Water, Phytoplanktonic Pigments, and the Yellow Substance. Oceanology 1977, 17, 278–282. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| λ, | %noiserel for Rrssat(λ) | %noiserel for BRsat(λ) = Rrssat(λ)/Rrssat(555) | ||||||
|---|---|---|---|---|---|---|---|---|
| nm | 31 August | 1 September | 2 September | 4 September | 31 August | 1 September | 2 September | 4 September |
| 412 | 24.2% | 6.8% | 7.7% | 9.8% | 25.3% | 7.9% | 9.7% | 11.7% |
| 443 | 7.4% | 4.4% | 3.4% | 4.3% | 7.7% | 4.6% | 5.7% | 8.8% |
| 469 | 5.0% | 3.7% | 2.8% | 2.7% | 5.9% | 4.5% | 5.6% | 8.4% |
| 488 | 3.2% | 1.8% | 2.0% | 2.1% | 5.0% | 3.2% | 4.2% | 7.0% |
| 531 | 2.3% | 2.0% | 1.8% | 2.5% | 2.6% | 2.6% | 2.7% | 4.2% |
| 547 | 2.1% | 2.6% | 2.0% | 2.6% | 1.9% | 2.0% | 1.7% | 3.2% |
| 555 | 2.9% | 3.7% | 3.1% | 3.8% | ||||
| 645 | 129.5% | 129.7% | 165.3% | 163.6% | 175.7% | 109.6% | 175.4% | 145.3% |
| 667 | 49.8% | 121.1% | 111.6% | 153.8% | 29.7% | 85.1% | 121.7% | 107.7% |
| 678 | 105.5% | 194.0% | 1370.7% | 1917.3% | 33.7% | 211.6% | 200.0% | 200.0% |
| %noiserel for chlor_asat | %noiserel for sst | |||||||
| 2.0% | 2.9% | 2.8% | 3.3% | 0.7% | 1.0% | 0.7% | 0.4% | |
| st.1 | st.2 | st.3 | st.4 | st.5 | st.6 | st.7 | st.8 | |
|---|---|---|---|---|---|---|---|---|
| 11.5% | 6.7% | 11.7% | 6.7% | 10.1% | 7.6% | 5.7% | 10.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lipinskaya, N.A.; Salyuk, P.A.; Golik, I.A. Variations and Depth of Formation of Submesoscale Eddy Structures in Satellite Ocean Color Data in the Southwestern Region of the Peter the Great Bay. Remote Sens. 2023, 15, 5600. https://doi.org/10.3390/rs15235600
Lipinskaya NA, Salyuk PA, Golik IA. Variations and Depth of Formation of Submesoscale Eddy Structures in Satellite Ocean Color Data in the Southwestern Region of the Peter the Great Bay. Remote Sensing. 2023; 15(23):5600. https://doi.org/10.3390/rs15235600
Chicago/Turabian StyleLipinskaya, Nadezhda A., Pavel A. Salyuk, and Irina A. Golik. 2023. "Variations and Depth of Formation of Submesoscale Eddy Structures in Satellite Ocean Color Data in the Southwestern Region of the Peter the Great Bay" Remote Sensing 15, no. 23: 5600. https://doi.org/10.3390/rs15235600
APA StyleLipinskaya, N. A., Salyuk, P. A., & Golik, I. A. (2023). Variations and Depth of Formation of Submesoscale Eddy Structures in Satellite Ocean Color Data in the Southwestern Region of the Peter the Great Bay. Remote Sensing, 15(23), 5600. https://doi.org/10.3390/rs15235600