
Correcting for Mobile X-Band Weather Radar Tilt Using Solar Interference


Abstract
:1. Introduction
2. Weather Radar Deployment and Data
3. Solar Interference Assessment Methodology
3.1. Solar Hit Identification
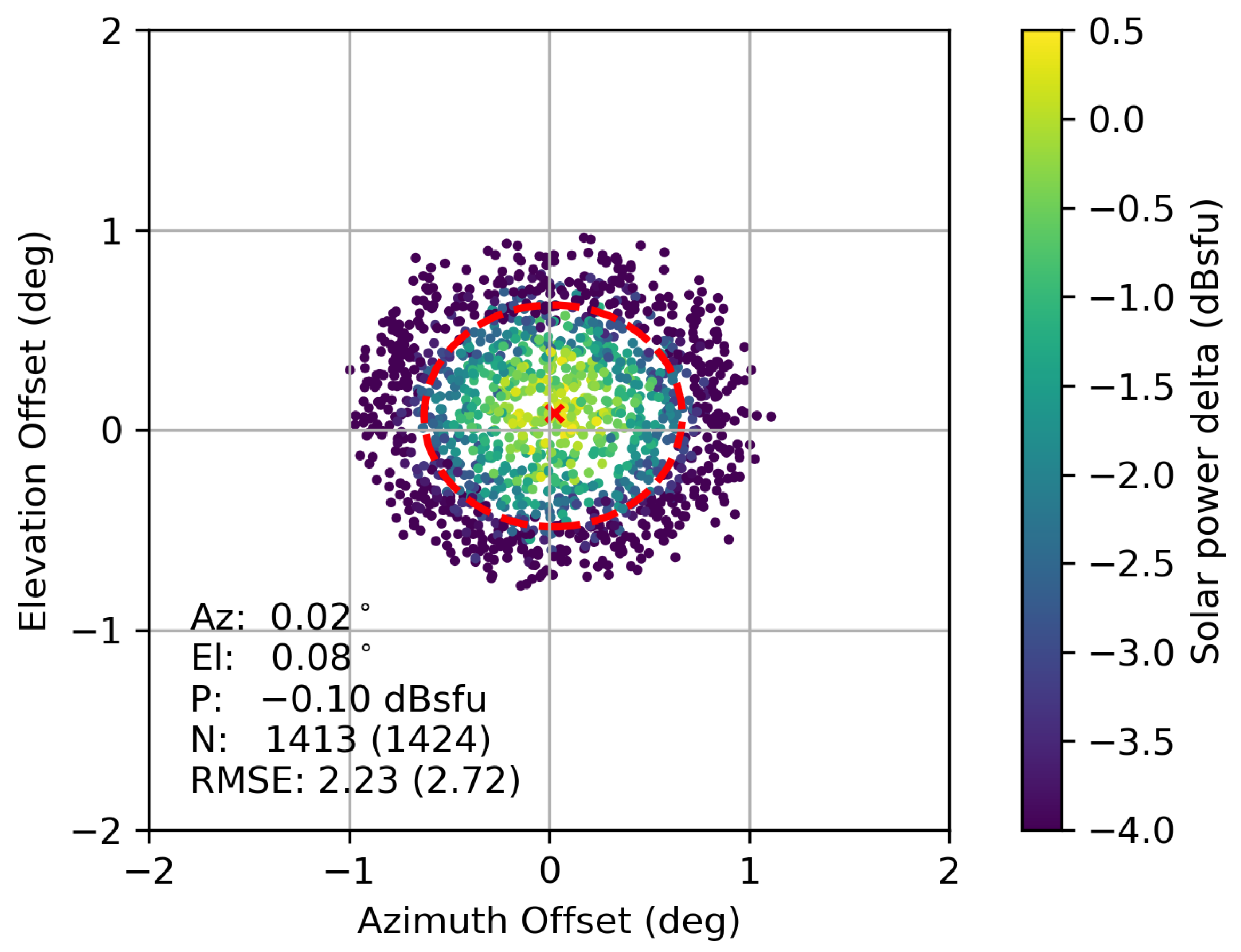
3.2. Application of a Multi-Parameter 2D Gaussian (Bullseye) Fit
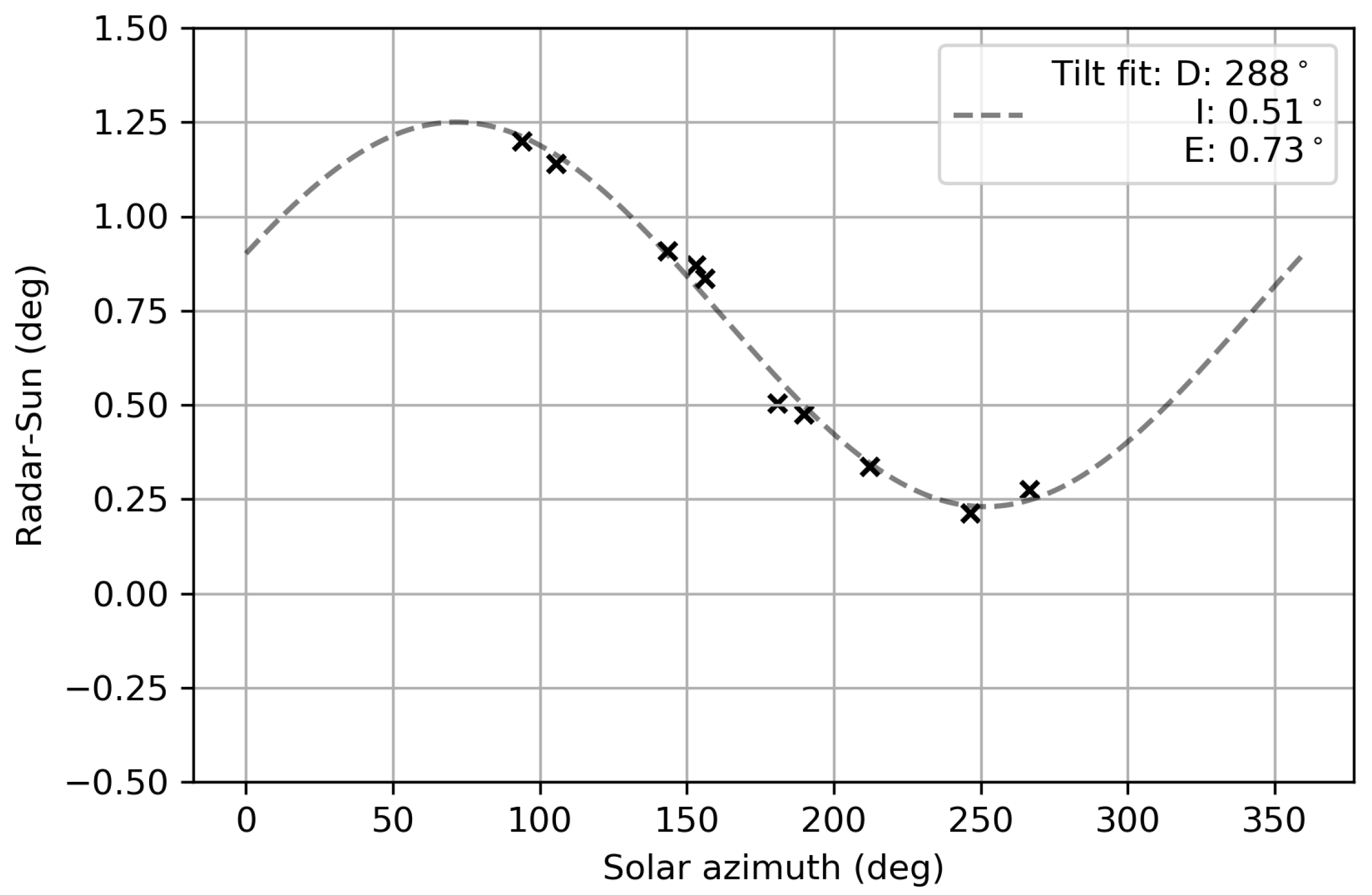
3.3. Using Online Solar Hits to Assess Radar Axis Tilt
3.4. Combined Methodology
4. Results of the Tilt Estimation Method
- A significant number (>40%) of points are excluded between the first and second fit of the bullseye model, which is accompanied by a large reduction in the RMSE from 1.34 to 0.50 (seen on the lower-right panel of Figure 4). This suggests that a Gaussian model with fixed offsets does not model the observations well.
- The estimated solar power offset of 1.64 dBsfu exceeds expectations based on Figure 3, again indicating the fitted model is not characterising the observations.
- The estimated elevation offsets of the two approaches agree very closely (within 0.05) despite the limitations of the bullseye fit due to averaging through time, which increases confidence in the results.
- The magnitude of the inclination is significant enough (>0.1°) to impact radar observations through time without being such a severe deviation from the previous period (>0.5°) as to prompt immediate intervention.
- The bullseye figure has a v-shaped distribution of points, with more-extreme elevation offsets also having more positive azimuth offsets. This is a particularly unusual distribution of points, even for a system with tilt, and is an indication that the offsets (either tilt/fixed or both) have changed through time, particularly as the solar flux delta is high within these distributions.
- Further evidence of time-variant offsets are the broad distribution of points across an extended elevation offset range (>1.0°, the typical maximum bullseye size given the radar sensitivity during the project) between 60 and 120 azimuth and the time-series plot (Figure 3), where the distribution of points is clearly asymmetric around the summer solstice. In the case of a system with a constant tilt through time, you would expect a more-symmetrical distribution as the azimuths sampled within the radar volume during spring are the same as those sampled during autumn.
5. Pointing Correction Verification
5.1. Solar Hit Reanalysis
5.2. Radar QPE and Verification with External Data
5.2.1. Radar QPE Methodology
5.2.2. Verification Using External Data
5.2.3. QPE Correction Results
6. Discussion and Conclusions
6.1. Review of the Analysis Methods and Results
6.2. Recommendations
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Raster Scan Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Time (UTC) | Azimuth Offset | Elevation Offset | Rx Offset |
|---|---|---|---|---|
| 14 September 2020 | 12:12:18 | 0.778 | 0.504 | −1.089 |
| 15 September 2020 | 10:42:37 | 0.651 | 0.871 | −1.086 |
| 15 September 2020 | 10:53:54 | 0.663 | 0.835 | −0.966 |
| 16 September 2020 | 10:07:39 | 0.565 | 0.908 | −0.756 |
| 16 September 2020 | 12:40:04 | 0.754 | 0.476 | −0.79 |
| 16 September 2020 | 13:54:23 | 0.655 | 0.337 | −1.281 |
| 16 September 2020 | 16:10:30 | 0.415 | 0.213 | −1.008 |
| 16 September 2020 | 17:45:14 | 0.328 | 0.274 | −0.994 |
| 17 September 2020 | 06:33:58 | 0.214 | 1.199 | −1.226 |
| 17 September 2020 | 07:30:06 | 0.258 | 1.140 | −1.296 |
References
- Sokol, Z.; Szturc, J.; Orellana-Alvear, J.; Popová, J.; Jurczyk, A.; Célleri, R. The Role of Weather Radar in Rainfall Estimation and Its Application in Meteorological and Hydrological Modelling—A Review. Remote Sens. 2021, 13, 351. [Google Scholar] [CrossRef]
- Ryzhkov, A.V.; Snyder, J.; Carlin, J.T.; Khain, A.; Pinsky, M. What Polarimetric Weather Radars Offer to Cloud Modelers: Forward Radar Operators and Microphysical/Thermodynamic Retrievals. Atmosphere 2020, 11, 362. [Google Scholar] [CrossRef]
- ISO 19926-1:2019; Meteorology—Weather Radar—Part 1: System Performance and Operation; Technical Report. International Organization for Standardization: Geneva, Switzerland, 2019.
- Harrison, D.; Georgiou, S.; Gaussiat, N.; Curtis, A. Long-term diagnostics of precipitation estimates and the development of radar hardware monitoring within a radar product data quality management system. Hydrol. Sci. J. 2014, 59, 1277–1292. [Google Scholar] [CrossRef]
- Bech, J.; Gjertsen, U.; Haase, G. Modelling weather radar beam propagation and topographical blockage at northern high latitudes. Q. J. R. Meteorol. Soc. 2007, 133, 1191–1204. [Google Scholar] [CrossRef]
- Germann, U.; Boscacci, M.; Clementi, L.; Gabella, M.; Hering, A.; Sartori, M.; Sideris, I.V.; Calpini, B. Weather Radar in Complex Orography. Remote Sens. 2022, 14, 503. [Google Scholar] [CrossRef]
- Frech, M.; Mathijssen, T.; Mammen, T.; Gabella, M.; Boscacci, M. Monitoring of Weather Radars: Lessons Learned from WXRCalMon17 & WXRCalMon19, and Recommendations. Work Package OA1, EUMETNET OPERA 5. 2020. Available online: https://www.eumetnet.eu/wp-content/uploads/2021/07/opera_monitoring_recommendations_1_21.pdf (accessed on 3 March 2022).
- Holleman, I.; Huuskonen, A. Analytical formulas for refraction of radiowaves from exoatmospheric sources. Radio Sci. 2013, 48, 226–231. [Google Scholar] [CrossRef]
- Darlington, T.; Kitchen, M.; Sugier, J.; de Rohan-Truba, J. Automated real-time monitoring of radar sensitivity and antenna pointing accuracy. In Proceedings of the 31st Conference on Radar Meteorology, Seattle, WA, USA, 6 August 2003; pp. 538–541. [Google Scholar]
- Frech, M.; Mammen, T.; Lange, B. Pointing Accuracy of an Operational Polarimetric Weather Radar. Remote Sens. 2019, 11, 1115. [Google Scholar] [CrossRef]
- Muth, X.; Schneebeli, M.; Berne, A. A sun-tracking method to improve the pointing accuracy of weather radar. Atmos. Meas. Tech. 2012, 5, 547–555. [Google Scholar] [CrossRef]
- Huuskonen, A.; Holleman, I. Determining Weather Radar Antenna Pointing Using Signals Detected from the Sun at Low Antenna Elevations. J. Atmos. Ocean. Technol. 2007, 24, 476–483. [Google Scholar] [CrossRef]
- Altube, P.; Bech, J.; Argemí, O.; Rigo, T.; Pineda, N. Intercomparison and Potential Synergies of Three Methods for Weather Radar Antenna Pointing Assessment. J. Atmos. Ocean. Technol. 2016, 33, 331–343. [Google Scholar] [CrossRef]
- Huuskonen, A.; Saltikoff, E.; Holleman, I. The Operational Weather Radar Network in Europe. Bull. Am. Meteorol. Soc. 2013, 95, 897–907. [Google Scholar] [CrossRef]
- Holleman, I.; Huuskonen, A.; Gill, R.; Tabary, P. Operational Monitoring of Radar Differential Reflectivity Using the Sun. J. Atmos. Ocean. Technol. 2010, 27, 881–887. [Google Scholar] [CrossRef]
- Curtis, M.; Dance, S.; Louf, V.; Protat, A. Diagnosis of Tilted Weather Radars Using Solar Interference. J. Atmos. Ocean. Technol. 2021, 38, 1613–1620. [Google Scholar] [CrossRef]
- Neely, R.R., III; Bennett, L.; Blyth, A.; Collier, C.; Dufton, D.; Groves, J.; Walker, D.; Walden, C.; Bradford, J.; Brooks, B.; et al. The NCAS mobile dual-polarisation Doppler X-band weather radar (NXPol). Atmos. Meas. Tech. 2018, 11, 6481–6494. [Google Scholar] [CrossRef]
- Bennett, L. RAIN-E: NCAS Mobile X-Band Radar Scan Data from SANDWITH, Near Whitehaven in Cumbria, UK, Version 1; Centre for Environmental Data Analysis: Chilton, UK, 2021. [Google Scholar] [CrossRef]
- Bennett, L. NCAS Mobile X-Band Radar Scan Data from 1st November 2016 to 4th June 2018 Deployed on Long-Term Observations at the Chilbolton Facility for Atmospheric and Radio Research (CFARR), Hampshire, UK; Centre for Environmental Data Analysis: Chilton, UK, 2020. [Google Scholar] [CrossRef]
- Michelson, D.; Henja, A.; Ernes, S.; Haase, G.; Koistinen, J.; Ośródka, K.; Peltonen, T.; Szewczykowski, M.; Szturc, J. BALTRAD Advanced Weather Radar Networking. J. Open Res. Softw. 2018, 6, 12. [Google Scholar] [CrossRef]
- Helmus, J.; Collis, S. The Python ARM Radar Toolkit (Py-ART), a Library for Working with Weather Radar Data in the Python Programming Language. J. Open Res. Softw. 2016, 4, e25. [Google Scholar] [CrossRef]
- Heistermann, M.; Collis, S.; Dixon, M.J.; Giangrande, S.; Helmus, J.J.; Kelley, B.; Koistinen, J.; Michelson, D.B.; Peura, M.; Pfaff, T.; et al. The Emergence of Open-Source Software for the Weather Radar Community. Bull. Am. Meteorol. Soc. 2015, 96, 117–128. [Google Scholar] [CrossRef]
- Holmgren, W.F.; Hansen, C.W.; Mikofski, M.A. pvlib python: A python package for modeling solar energy systems. J. Open Source Softw. 2018, 3, 884. [Google Scholar] [CrossRef]
- Altube, P. Procedures for Improved Weather Radar Data Quality Control. Ph.D. Thesis, Universitat de Barcelona, Barcelona, Spain, 2016. Available online: http://hdl.handle.net/10803/400398 (accessed on 28 November 2023).
- Gabella, M.; Leuenberger, A. Dual-Polarization Observations of Slowly Varying Solar Emissions from a Mobile X-Band Radar. Sensors 2017, 17, 1185. [Google Scholar] [CrossRef]
- Tapping, K. Antenna calibration using the 10.7 cm solar flux. In Workshop on Radar Calibration; American Meteor Society: Albuquerque, NM, USA, 2001; Volume 1. [Google Scholar]
- Ryzhkov, A.; Zhang, P.; Bukovčić, P.; Zhang, J.; Cocks, S. Polarimetric Radar Quantitative Precipitation Estimation. Remote Sens. 2022, 14, 1695. [Google Scholar] [CrossRef]
- Wallbank, J.R.; Dufton, D.; Neely, R.R., III; Bennett, L.; Cole, S.J.; Moore, R.J. Assessing precipitation from a dual-polarisation X-band radar campaign using the Grid-to-Grid hydrological model. J. Hydrol. 2022, 613, 128311. [Google Scholar] [CrossRef]
- Neely, R.R., III; Parry, L.; Dufton, D.; Bennett, L.; Collier, C. Radar Applications in Northern Scotland (RAiNS). J. Hydrometeorol. 2021, 22, 483–498. [Google Scholar] [CrossRef]
- Dufton, D.R.L.; Collier, C.G. Fuzzy logic filtering of radar reflectivity to remove non-meteorological echoes using dual polarization radar moments. Atmos. Meas. Tech. 2015, 8, 3985–4000. [Google Scholar] [CrossRef]
- NASA Shuttle Radar Topography Mission (SRTM). Shuttle Radar Topography Mission (SRTM) Global. Distributed by OpenTopography. Dataset 2013. [Google Scholar] [CrossRef]
- Heistermann, M.; Jacobi, S.; Pfaff, T. Technical Note: An open source library for processing weather radar data (wradlib). Hydrol. Earth Syst. Sci. 2013, 17, 863–871. [Google Scholar] [CrossRef]
- Marshall, J.S.; Hitschfeld, W.; Gunn, K.L.S. Advances in Radar Weather. In Advances in Geophysics; Landsberg, H.E., Ed.; Academic Press Inc.: New York, NY, USA, 1955; Volume 2, pp. 1–56. [Google Scholar] [CrossRef]
- Chandrasekar, V.; Baldini, L.; Bharadwaj, N.; Smith, P.L. Recommended Calibration Procedures for GPM Ground Validation Radars; Technical Report, GPM Tier1 Documentation Draft, 9. 2014. Available online: https://gpm-gv.gsfc.nasa.gov/Tier1/Docs/NASA_GPM_GV-cal_9.pdf (accessed on 1 May 2023).
- Silberstein, D.S.; Wolff, D.B.; Marks, D.A.; Atlas, D.; Pippitt, J.L. Ground Clutter as a Monitor of Radar Stability at Kwajalein, RMI. J. Atmos. Ocean. Technol. 2008, 25, 2037–2045. [Google Scholar] [CrossRef]
- Gabella, M. On the Spectral and Polarimetric Signatures of a Bright Scatterer before and after Hardware Replacement. Remote Sens. 2021, 13, 919. [Google Scholar] [CrossRef]






| Date | Reason for Site Visit |
|---|---|
| 30 October 2018 | Deployment of the radar at Sandwith |
| 7 November 2018 to 8 November 2018 | Partner site induction and general check |
| 13 December 2018 | Site inductions and replacement of satellite dish cable |
| 14 February 2019 | Routine site inspection |
| 15 April 2019 to 17 April 2019 | Routine site inspection |
| 30April 2019 | Digital receiver fault, removed and sent for repair |
| 4 July 2019 | Radar returned to operational mode with new receiver |
| 25 September 2019 | Routine site inspection |
| 28 October 2019 to 30 October 2019 | Receiver fault investigation and corrosion check |
| 05 November 2019 | New receiver board installed |
| 25 February 2020 | Project meeting and general-interest site visit |
| 14 October 2020 | Scaffold maintenance visit |
| 18 December 2020 | No visit, end of campaign radar operations due to fault |
| Period | Start Date | End Date | Length (Days) | N | N/Day |
|---|---|---|---|---|---|
| 1 | 1 November 2018 | 8 November 2018 | 7 | 40 | 5.7 |
| 2 | 8 November 2018 | 13 December 2018 | 35 | 75 | 2.1 |
| 3 | 13 December 2018 | 14 February 2019 | 63 | 130 | 2.1 |
| 4 | 14 February 2019 | 15 April 2019 | 60 | 48 | 0.8 |
| 5 | 17 April 2019 | 30 April 2019 | 13 | 39 | 3.0 |
| 6 | 4 July 2019 | 25 September 2019 | 83 | 285 | 3.4 |
| 7 | 25 September 2019 | 29 October 2019 | 34 | 97 | 2.9 |
| 8 | 5 November 2019 | 14 October 2020 | 344 | 1607 | 4.7 |
| 9 | 14 October 2020 | 18 December 2020 | 65 | 579 | 8.9 |
| Bullseye Fit | Tilt Fit | |||||||
|---|---|---|---|---|---|---|---|---|
| Period | N | RMSE | D | I | ||||
| 1 | 15 (40) | −0.45° | 0.07° | 2.12 | 0.43 (1.63) | 119° | 0.72° | −0.14° |
| 2 | 75 (75) | −0.05° | 0.16° | 0.39 | 0.27 (0.27) | 0° | 0.50° | 0.57° |
| 3 | 130 (130) | −0.03° | 0.16° | 0.43 | 0.29 (0.29) | 353° | 0.24° | 0.37° |
| 4 | 47 (48) | 0.00° | 0.35° | 0.48 | 0.36 (0.45) | 181° | 0.41° | 0.20° |
| 5 | 37 (39) | −0.10° | 0.24° | 0.39 | 0.41 (0.48) | 43° | 0.11° | 0.31° |
| 6 | 262 (285) | −0.19° | 0.49° | 1.46 | 0.44 (0.63) | 186° | 0.23° | 0.52° |
| 7 | 93 (97) | 0.01° | 0.46° | 1.70 | 0.40 (0.50) | 292° | 0.14° | 0.49° |
| 8 | 953 (1607) | 0.08° | 0.54° | 1.64 | 0.50 (1.34) | 268° | 0.25° | 0.50° |
| 9 | 495 (579) | −0.08° | 0.05° | 1.29 | 0.43 (0.72) | 307° | 0.27° | 0.19° |
| Period | I | D | ||
|---|---|---|---|---|
| 1 | −0.13° | −0.14° | 0.72° | 119° |
| 2 | −0.04° | 0.16° | 0.00° | 0° |
| 3 | −0.03° | 0.16° | 0.00° | 0° |
| 4 | −0.03° | 0.20° | 0.41° | 181° |
| 5 | −0.10° | 0.24° | 0.00° | 0° |
| 6 | −0.17° | 0.52° | 0.23° | 186° |
| 7 | −0.01° | 0.49° | 0.14° | 292° |
| 8a | −0.08° | 0.42° | 0.18° | 238° |
| 8b | 0.26° | 0.58° | 0.48° | 261° |
| 9 | −0.12° | 0.19° | 0.27° | 307° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dufton, D.; Bennett, L.; Wallbank, J.R.; Neely, R.R., III. Correcting for Mobile X-Band Weather Radar Tilt Using Solar Interference. Remote Sens. 2023, 15, 5637. https://doi.org/10.3390/rs15245637
Dufton D, Bennett L, Wallbank JR, Neely RR III. Correcting for Mobile X-Band Weather Radar Tilt Using Solar Interference. Remote Sensing. 2023; 15(24):5637. https://doi.org/10.3390/rs15245637
Chicago/Turabian StyleDufton, David, Lindsay Bennett, John R. Wallbank, and Ryan R. Neely, III. 2023. "Correcting for Mobile X-Band Weather Radar Tilt Using Solar Interference" Remote Sensing 15, no. 24: 5637. https://doi.org/10.3390/rs15245637
APA StyleDufton, D., Bennett, L., Wallbank, J. R., & Neely, R. R., III. (2023). Correcting for Mobile X-Band Weather Radar Tilt Using Solar Interference. Remote Sensing, 15(24), 5637. https://doi.org/10.3390/rs15245637