1. Introduction
Polarimetric synthetic aperture radar (PolSAR) can obtain rich information of the observed targets [
1,
2,
3]. It has been widely used in agricultural monitoring, natural disaster assessment, biomass statistics, etc. The technologies of PolSAR image interpretation can help us understand and identify targets from an image; thus, it has always been a concern for researchers. However, since the formation mechanism of a PolSAR image is very complex, PolSAR image interpretation is still a challenging task. In recent years, driven by deep learning, two kinds of image interpretation technologies, namely image classification [
4,
5,
6,
7,
8] and semantic segmentation [
9,
10,
11], have made remarkable achievements.
PolSAR image classification based on deep learning has been deeply and extensively studied. According to the supervision mode, it mainly has three kinds of methods, namely, supervised, unsupervised, and semi-supervised [
12]. For the supervised methods, convolutional neural networks (CNNs) [
5,
13] were the most widely used. Furthermore, a recursive neural network [
14] was used. For the unsupervised methods, a deep belief network [
15], an auto-encoder combined with Wishart distribution [
16], and a task-oriented generative adversarial network [
17] were studied. For the semi-supervised methods, a self-training model [
18] and graph-based models [
19,
20] were proposed. In addition, some deep active learning and other new techniques were explored [
21,
22].
The research about CNN-based PolSAR image classification mainly focused on the real-valued (RV) structures and the inputs of networks at first. In terms of RV CNN structure, a four-layer CNN [
23], a dual-branch deep CNN [
24], a multi-channel fusion CNN [
25], and a lightweight 3D CNN [
26] were proposed. In terms of RV CNN inputs, some polarimetric features were selected to accelerate the convergence speed of CNN [
13]. Then, complete features obtained by the polarimetric scattering coding were also used as the inputs [
27]. Moreover, the amplitude and phase of the polarimetric coherence matrix were extracted as the inputs of a multi-task CNN [
28]. Although both the methods of improving the network structure and extracting the complete input information effectively improved the classification performance, the problem of information loss caused by the RV structures and inputs still existed. Subsequently, some complex-valued (CV) CNNs were proposed to directly use the CV polarimetric coherent matrix as the input, aiming to avoid information loss. For example, a three-layer CV CNN [
5], a CV 3D CNN [
29], a CV 3D CNN combined with conditional random field [
30], and a CV PolSAR-tailored differentiable architecture network [
7] were widely studied. Furthermore, recurrent CV CNN combined with semi-supervised learning was also proposed for the classification with a small number of samples [
31]. In the above classification processes, the training samples were obtained by using a sliding window, and each of them was an image patch with a small size. After the classification of each image patch, the obtained category was determined as the category of the center pixel in the patch. This pixel-by-pixel process had the problem of computational redundancy.
Semantic segmentation based on deep learning can achieve pixel-level classification in an end-to-end manner. Among various deep learning technologies, semantic segmentation networks based on s fully convolutional network (FCN) [
32] have been rapidly developed. There are U-Net [
33], SegNet [
34], PSPNet [
35], DeepLabv3+ [
36], RefineNet [
37], and so on. These networks have been used for semantic segmentation of optical [
34,
35,
36,
37], medical [
33], and remote sensing images [
38,
39,
40,
41]. In the field of PolSAR image interpretation, semantic segmentation can effectively avoid the repeated computation when compared with image classification.
Figure 1 shows the main differences between PolSAR image classification and semantic segmentation. For PolSAR image classification, the input is a small image patch that can be represented by a polarimetric coherent matrix, polarimetric decomposition results, and so on. The output is the category of the central pixel in the image patch. For semantic segmentation of a PolSAR image, the input is a large image block including multiple classes of targets, and its representation is the same as that of image classification. The output is the categories of all pixels in the image. Obviously, semantic segmentation can significantly reduce the computing time.
The research about semantic segmentation of PolSAR images started from FCN. Initially, FCN was only used to extract image features. Wang et al. used FCN to extract the spatial features and combined them with sparse and low-rank subspace features [
42]. He et al. integrated FCN with a manifold graph embedding model to extract spatially polarized features [
43]. After that, FCN, U-Net, SegNet, and DeepLabv3+ were applied in the semantic segmentation of PolSAR images in the real sense. Li et al. combined sliding window FCN with sparse coding to avoid the repeated calculations [
44]. Mohammadimanesh et al. presented a new FCN with an encoder–decoder architecture for semantic segmentation of complex land cover ecosystems [
45]. Pham et al. verified that SegNet could obtain promising segmentation results on very high-resolution PolSAR images [
46]. Wu et al. used two structural modes (i.e., FCN and U-Net) and combined transfer learning strategies to perform semantic segmentation when the training set size was small [
47]. Zhao et al. proposed a parallel dual-channel dilated FCN and used a semi-supervised fuzzy c-means clustering method to increase the number of the training samples [
48]. Jing et al. proposed a polarimetric space reconstruction network, which included a scattering and polarimetric coherency coding module, a statistics enhancement module, and a dual self-attention convolutional network [
49]. In order to fully utilize both amplitude and phase information of PolSAR data, Cao et al. presented a novel CV FCN [
50], and Yu et al. proposed a lightweight CV Deeplabv3+ (L-CV-Deeplabv3+) [
51].
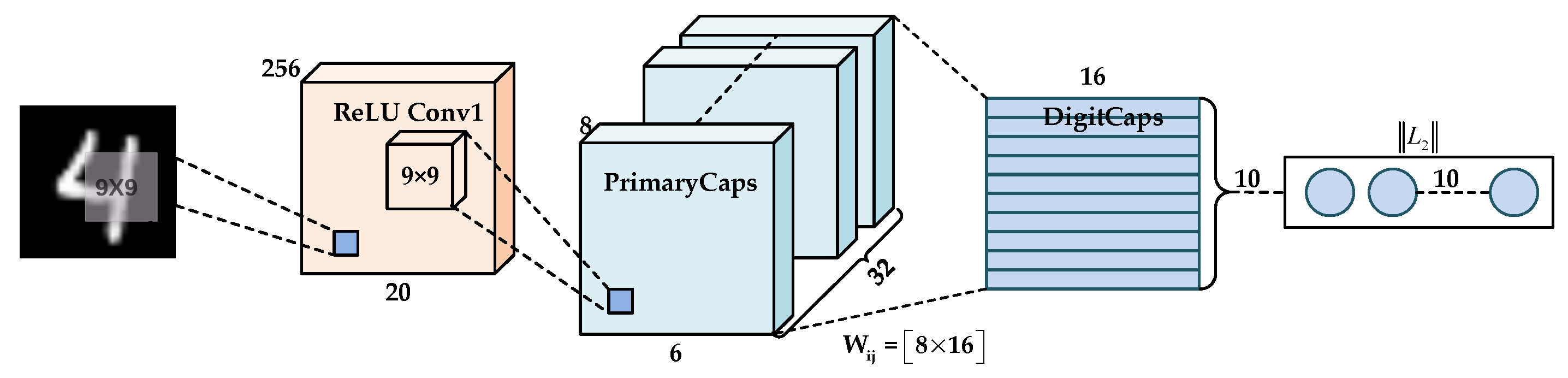
The above CNN-based PolSAR image classification and FCN-based semantic segmentation greatly promoted the development of PolSAR image interpretation. However, there is still room for improvement due to the inherent defects of CNN. Taking face recognition as an example, even if the relative position of human eyes and mouth in an image is incorrect, CNN still recognizes it as a face because it is difficult for CNN to learn the relative positions between different entities in an image. A capsule network, which uses a vector neuron as the basic unit, can learn more information than CNN [
52]. The amplitude of one activity vector neuron represents the probability of the existence of entities, and the orientation expresses instantiation parameters. Regarding the face recognition example, the capsule network can obtain the relative position between human eyes and the mouth, thus correctly recognizing the face. Furthermore, since vector neurons contain multiple properties of entities in the image, the capsule network requires fewer training samples than CNN during the training process. Up to now, the capsule network has also been widely used in optical [
53,
54], medical [
55,
56], remote sensing [
57], and other image interpretation fields [
58]. In the field of PolSAR image classification, Cheng et al. proposed a hierarchical capsule network to extract deep and shallow features. Experimental results on datasets from different platforms showed that the network had good generalization performance [
59]. In the field of medical image semantic segmentation, Lalonde et al. proposed a segmented capsule network with U-shaped structure. Experimental results on pathological lungs showed that this network not only had better segmentation performance but also involved fewer parameters than U-Net [
60].
In this paper, based on our previous work [
61], we propose a CV U-Net with a capsule network embedded for semantic segmentation of PolSAR images. The reason for using U-Net as the backbone network is that its simple structure has good performance on small datasets when compared with other FCN-based segmentation networks. Considering that the PolSAR datasets used in this paper are small, the structure of U-Net is further lightweight to match these datasets. Moreover, U-Net is extended to the CV domain to directly use CV PolSAR data as the input. This CV network can mine the characteristics of the target from CV data, avoiding loss of information. In order to improve the feature extraction ability of the network, a CV capsule network is added behind the encoder of the CV U-Net. The CV capsule network mainly includes the CV primary capsules and the segmented capsules, which are different from those given in [
52]. Inspired by [
60], we also propose a locally constrained CV dynamic routing mechanism to realize the connection between capsules in two adjacent layers. The main contributions of this paper can be concluded as follows.
A lightweight CV U-Net is designed for semantic segmentation of PolSAR image. It uses a polarimetric coherence matrix as the input of the network, aiming to utilize both the amplitude and phase information of PolSAR data. The lightweight structure of the network can match the PolSAR datasets with a small number of training samples.
A CV capsule network is embedded between the encoder and decoder of CV U-Net to extract abundant features of PolSAR image. To make the CV capsule network suitable for semantic segmentation, the segmented capsule is adopted to replace the digital capsule used in the image classification.
The locally constrained CV dynamic routing is proposed for the connection between capsules in two adjacent layers. The locally constrained characteristic helps to extend the dynamic routing to the connection of capsules with large sizes, and the routing consistency of the real part and imaginary part of the CV capsules improves the correctness of the extracted entity properties.
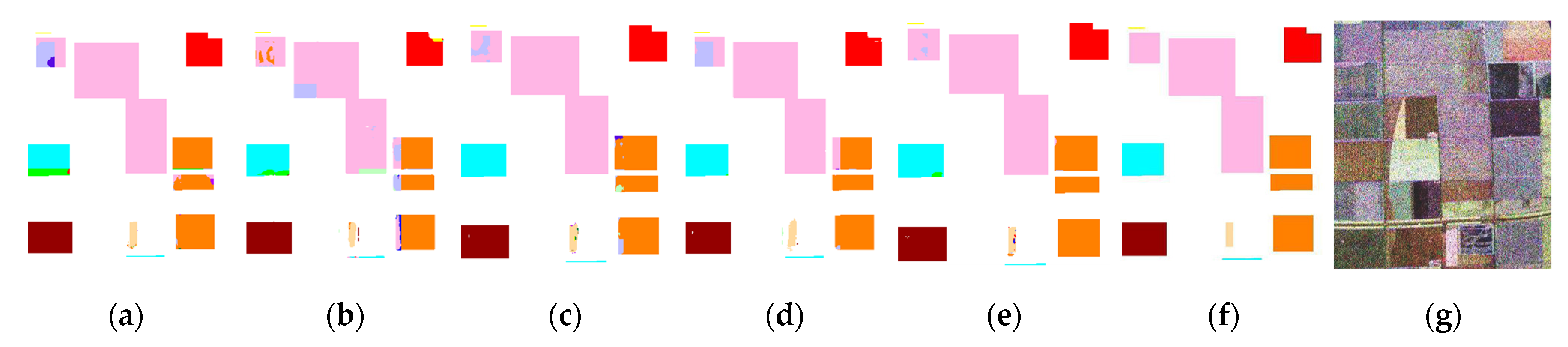
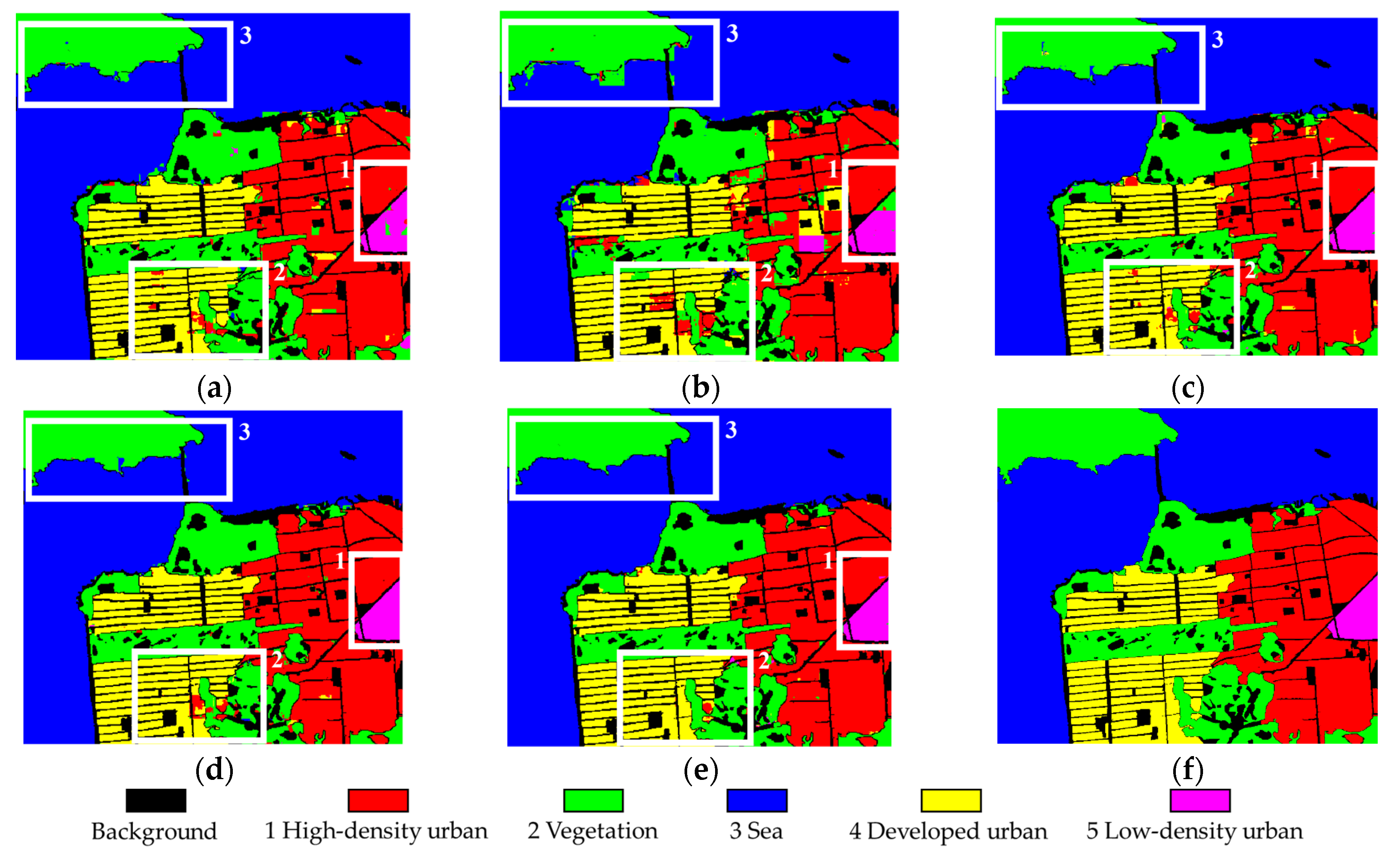
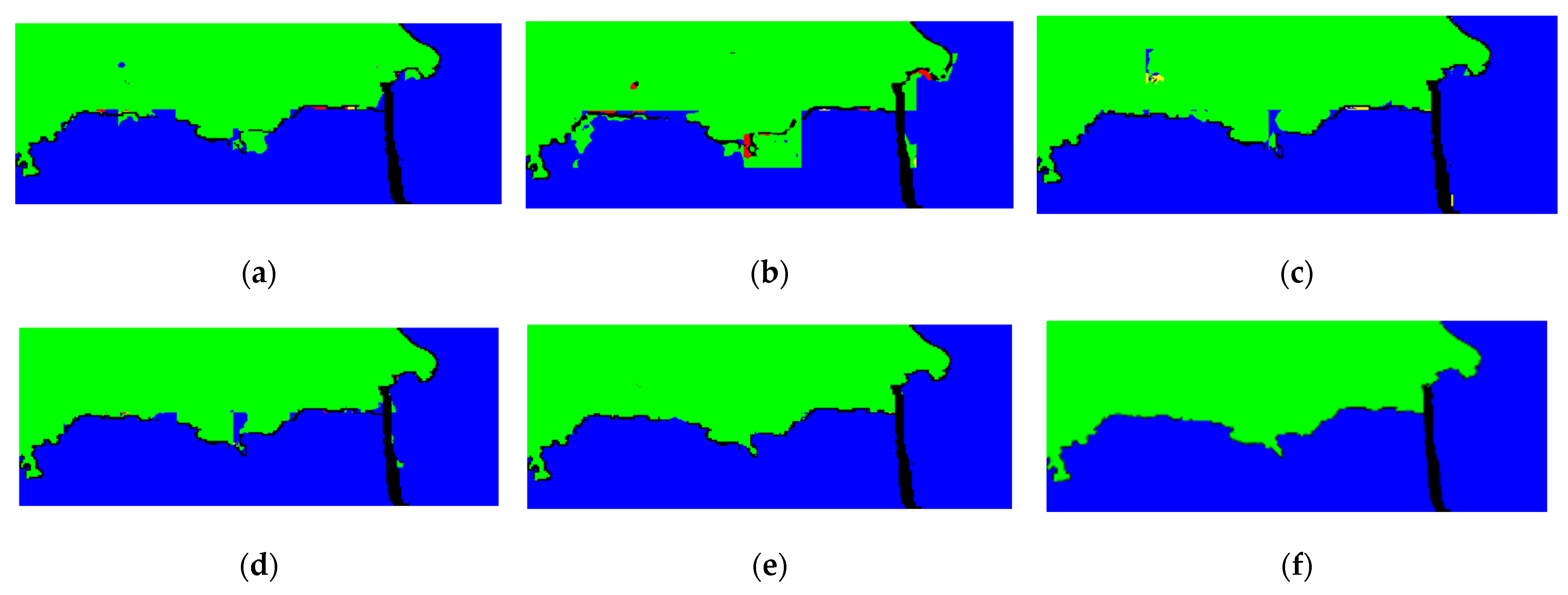
Experiments on two airborne datasets and one Gaofen-3 PolSAR dataset verify that the proposed network can achieve better segmentation performance than other RV and CV networks, especially when the training set size is small.
The rest of this paper is organized as follows. The theoretical background about PolSAR data, U-Net and the capsule network are introduced in
Section 2.
Section 3 proposes a CV U-Net with capsule embedded and illustrates the principle of locally constrained CV dynamic routing. Experimental results and analysis are shown in
Section 4.
Section 5 discusses the improvement of segmentation performance brought by the CV capsule network. Finally, the conclusion is given in
Section 6.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}