

Dielectric Fluctuation and Random Motion over Ground Model (DF-RMoG): An Unsupervised Three-Stage Method of Forest Height Estimation Considering Dielectric Property Changes


Abstract
:1. Introduction
2. Methodology
2.1. Study Site
2.2. Data
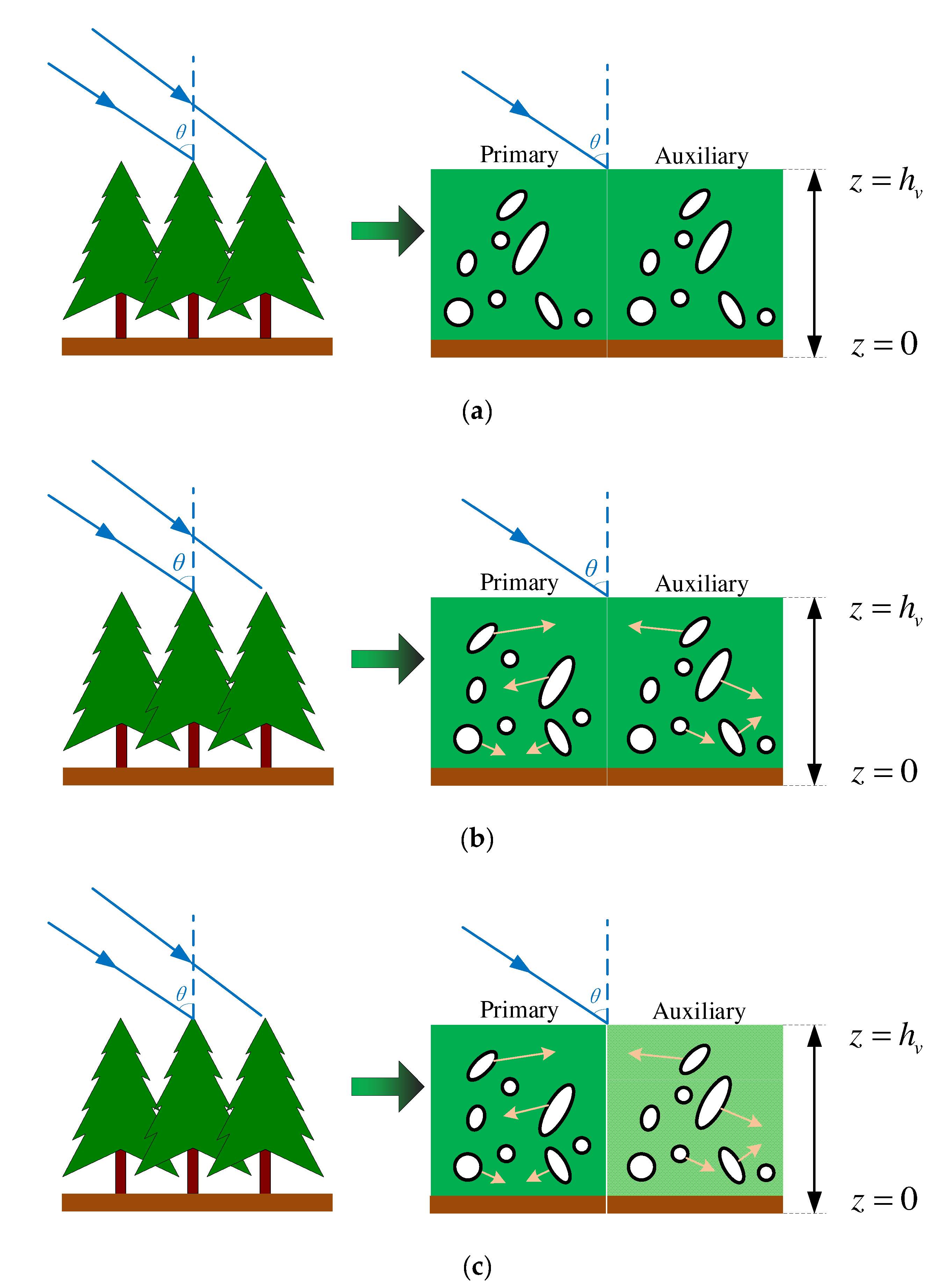
2.3. The Proposed DF-RMoG Model
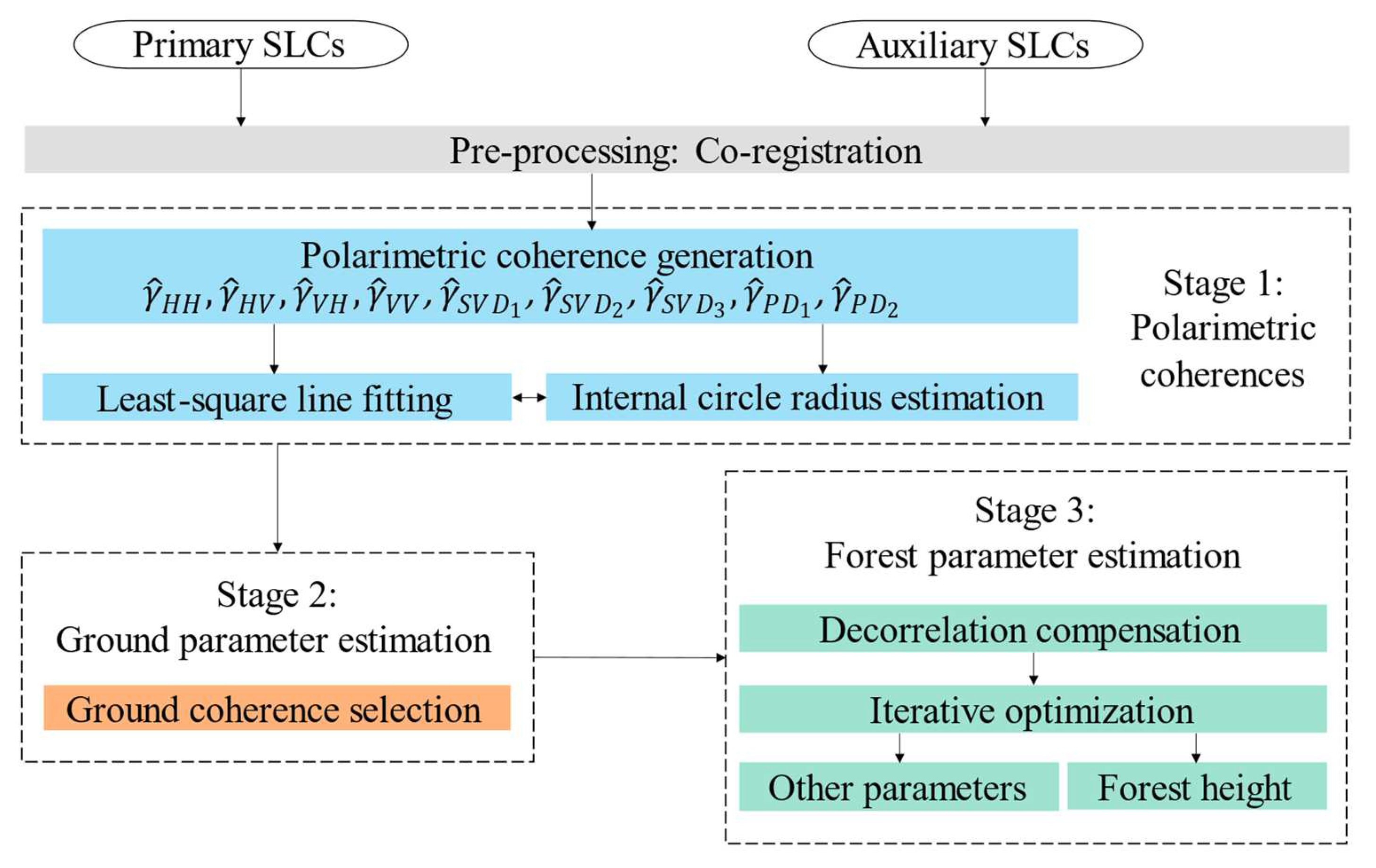
2.4. Refined Forest Height Estimation Workflow
3. Results
3.1. Analyses of Coherence Results between Three Models
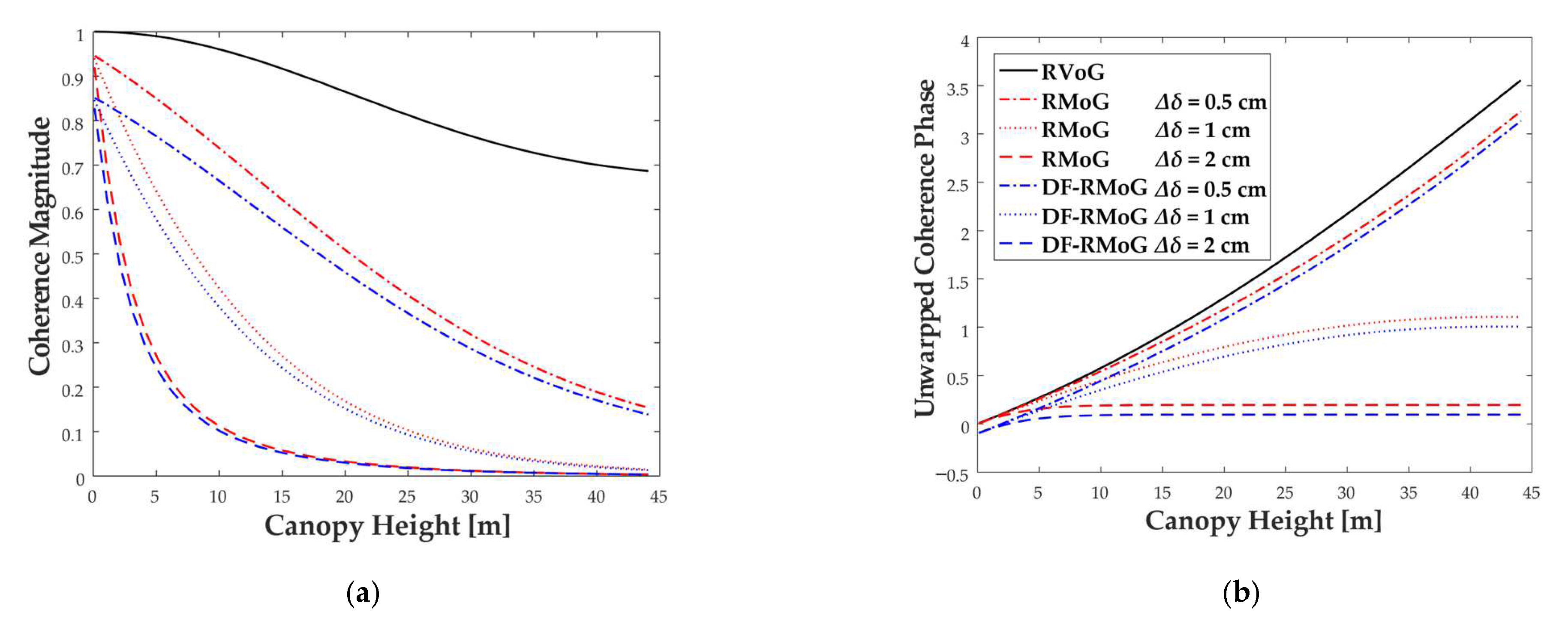
3.1.1. Numerical Analysis
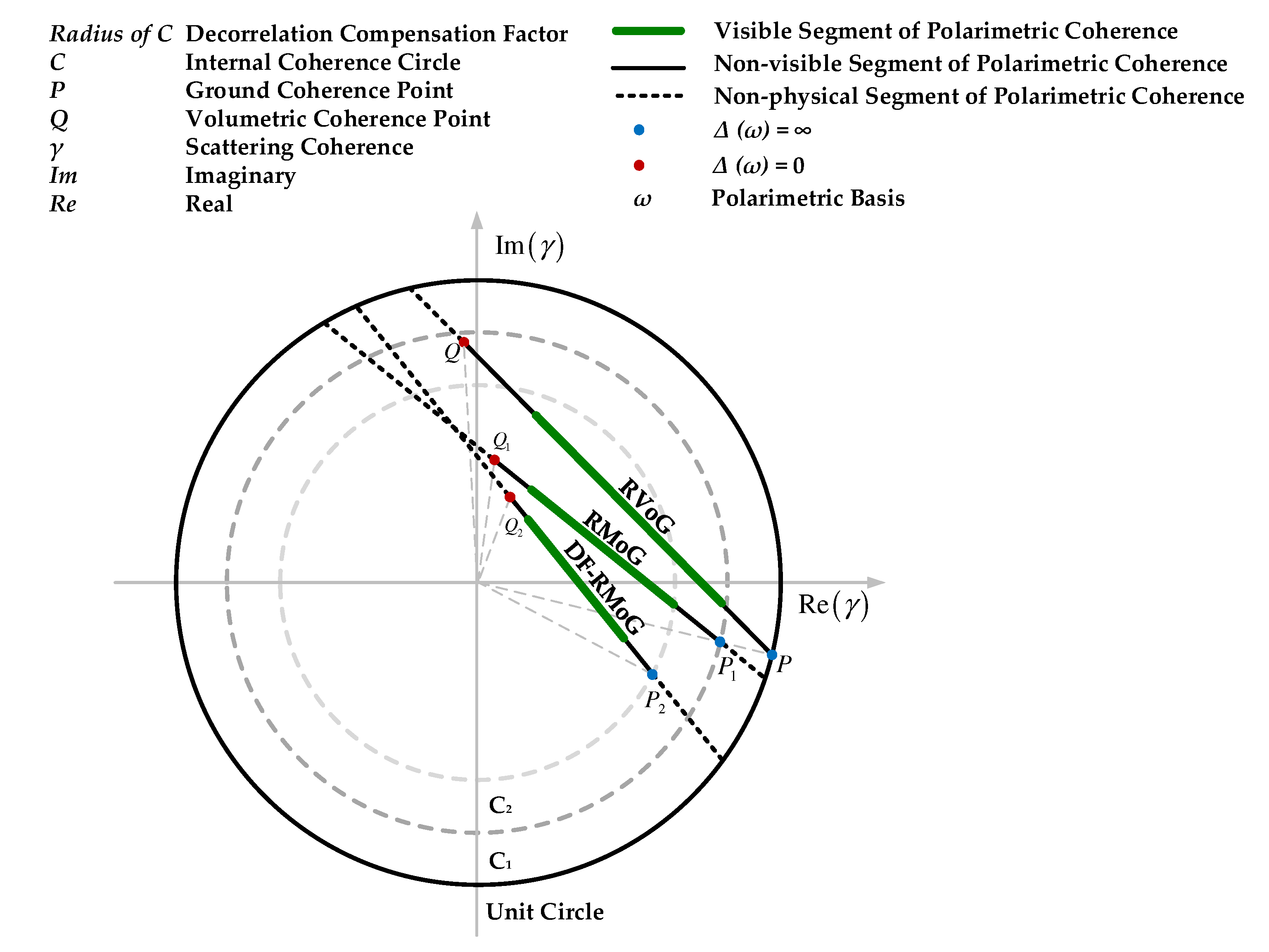
3.1.2. Geometrical Analysis
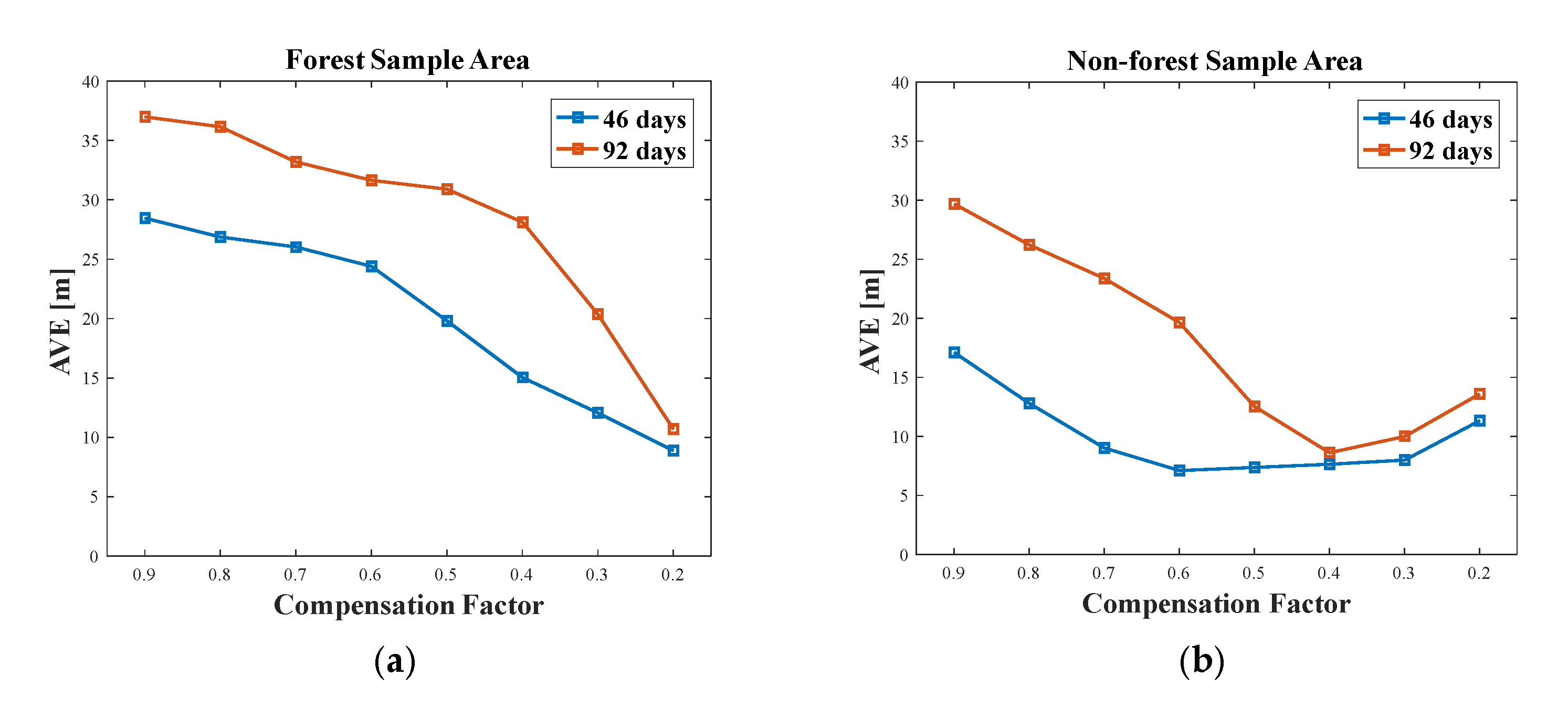
3.2. Results of DF-RMoG with Different Compensation Factor Values for Dielectric Fluctuations
3.2.1. Results of Data with the Temporal Baseline of 46 Days
3.2.2. Results of Data with Temporal Baseline of 92 Days
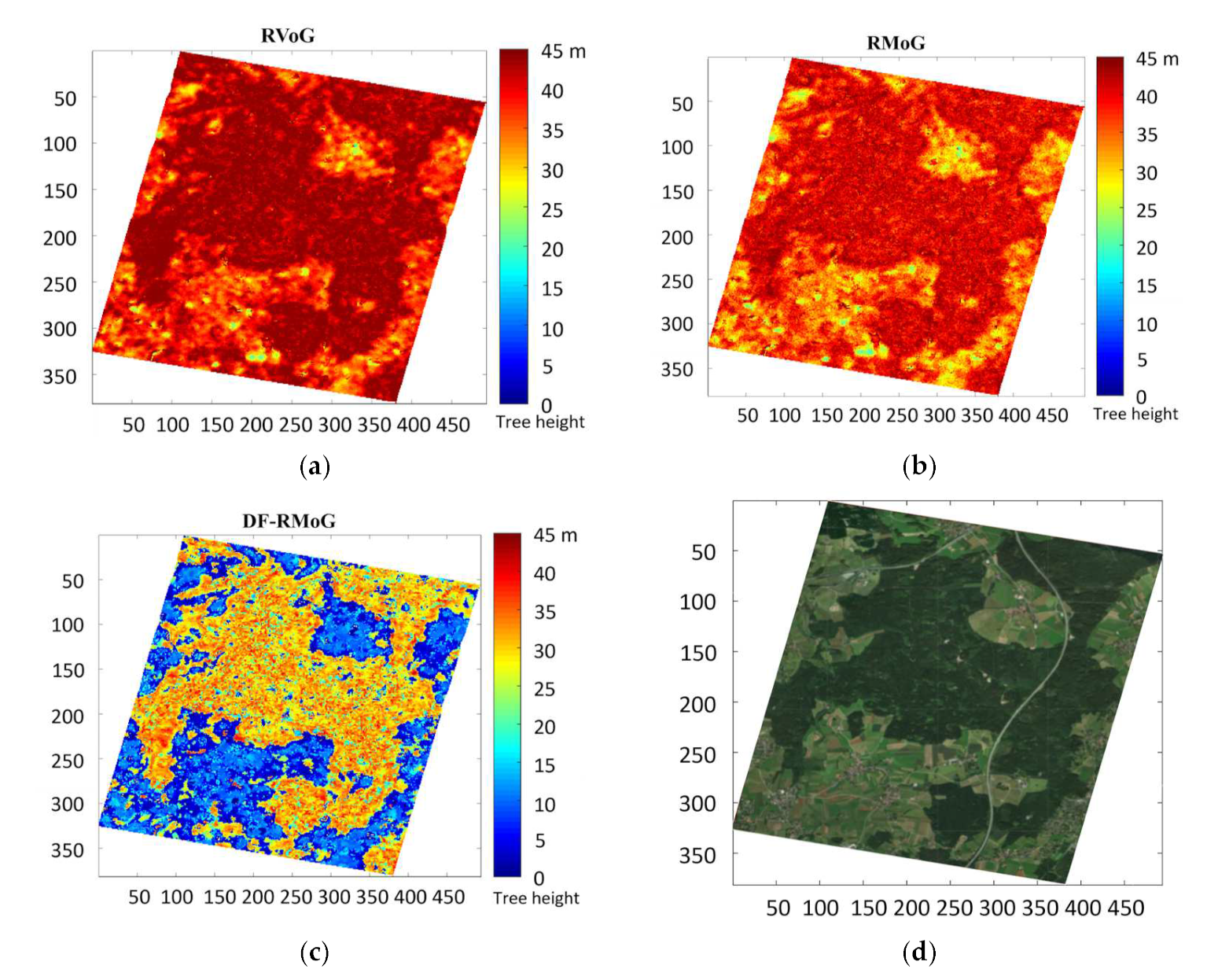
3.3. Comparison of Performance of Forest Height Estimation Results between Three Models
3.3.1. Experiments with the Temporal Baseline of 46 Days
3.3.2. Experiments with the Temporal Baseline of 92 Days
4. Discussion
4.1. Local Over-Compensation
4.2. Forest Height Estimation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Unit | Description | First Appearance |
| - | Scattering coherence | Equation (1) | |
| rad/m | Topographic phase | Equation (1) | |
| m | - | Ground-to-volume ratio | Equation (1) |
| ω | - | Polarimetric basis | Equation (1) |
| j | - | Imaginary unit | Equation (1) |
| - | Ground dielectric decorrelation | Equation (1) | |
| DF | - | dielectric fluctuation | Equation (1) |
| - | Ground motion decorrelation | Equation (1) | |
| RM | - | random motion | Equation (1) |
| - | Dielectric and motion compensated volumetric coherence | Equation (1) | |
| λ | m | Radar wavelength | Equation (2) |
| m2 | Statistical variance of ground motion | Equation (2) | |
| m−1 | Vertical wavenumber | Equation (3) | |
| - | Volumetric attenuation function | Equation (3) | |
| - | Volumetric motion function | Equation (3) | |
| - | Volumetric dielectric function | Equation (3) | |
| dB/m | Mean extinction coefficient | Equation (4) | |
| degree | Incidence angle | Equation (4) | |
| m2 | Variance gradient of volumetric motion | Equation (5) | |
| degree | Incidence angle difference | Equation (6) | |
| m | Perpendicular baseline | Equation (6) | |
| m | Slant range distance | Equation (6) | |
| - | Motion compensated volumetric coherence | Equation (8) | |
| - | Motion compensated volumetric coherence excluding | Equation (8) | |
| - | Internal circle radius | Equation (10) | |
| rad/m | Intersection phase | Equation (10) | |
| Rad/m | Phase error from dielectric decorrelation | Equation (10) | |
| m | Forest height | Equation (12) | |
| - | Horizontal and vertical coherence observations | Equation (13) | |
| - | Singular value decomposition coherence observations | Equation (13) | |
| - | Pauli decomposition coherence observations | Equation (13) | |
| rad/m | Estimated intersection phase | Equation (15) | |
| m | Average forest height | Equation (16) | |
| - | Relative decrease percentage | Equation (16) |
References
- Zhang, Q.; Ge, L.; Du, Z. A Modified RMoG Model for Forest Height Inversion Using L-Band Repeat-Pass Pol-InSAR Data. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 3217–3220. [Google Scholar]
- Cloude, S.; Papathanassiou, K.P.; Pottier, E. Radar polarimetry and polarimetric interferometry. IEICE Trans. Electron. 2001, 84, 1814–1822. [Google Scholar]
- Papathanassiou, K.; Reigber, A.; Scheiber, R.; Horn, R.; Moreira, A.; Cloude, S. Airborne polarimetric SAR interferometry. In Proceedings of the IGARSS 1998—1998 IEEE International Geoscience and Remote Sensing Symposium, Seattle, WA, USA, 6–10 July 1998; pp. 1901–1903. [Google Scholar]
- Zhang, Q.; Ge, L.; Hensley, S.; Metternicht, G.I.; Liu, C.; Zhang, R. PolGAN: A deep-learning-based unsupervised forest height estimation based on the synergy of PolInSAR and LiDAR data. ISPRS J. Photogramm. Remote Sens. 2022, 186, 123–139. [Google Scholar] [CrossRef]
- Xie, J.; Li, L.; Zhuang, L.; Zheng, Y. A New Strategy for Forest Height Estimation Using Airborne X-Band PolInSAR Data. Remote Sens. 2022, 14, 4743. [Google Scholar] [CrossRef]
- Papathanassiou, K.P.; Cloude, S.R. Single-baseline polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2352–2363. [Google Scholar] [CrossRef] [Green Version]
- Managhebi, T.; Maghsoudi, Y.; Amani, M. Forest Height Retrieval Based on the Dual PolInSAR Images. Remote Sens. 2022, 14, 4503. [Google Scholar] [CrossRef]
- Eriksson, L.E.; Santoro, M.; Fransson, J.E. Temporal decorrelation for forested areas observed in spaceborne L-band SAR interferometry. In Proceedings of the IGARSS 2008—IEEE 2008 Geoscience and Remote Sensing Symposium, Boston, MA, USA, 6–11 July 2008; pp. V-283–V–285. [Google Scholar]
- Lee, S.; Kugler, F.; Papathanassiou, K.; Moreira, A. Forest height estimation by means of Pol-InSAR limitations posed by temporal decorrelation. In Proceedings of the 11th ALOS Kyoto & Carbon Initiative, Tsukuba, Japan, 28 December 2009. [Google Scholar]
- Papathanassiou, K.; Cloude, S.R. The effect of temporal decorrelation on the inversion of forest parameters from PoI-InSAR data. In Proceedings of the IGARSS 2003—IEEE 2003 International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 1429–1431. [Google Scholar]
- Lavalle, M.; Simard, M.; Hensley, S. A temporal decorrelation model for polarimetric radar interferometers. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2880–2888. [Google Scholar] [CrossRef]
- Simard, M.; Denbina, M. An Assessment of Temporal Decorrelation Compensation Methods for Forest Canopy Height Estimation Using Airborne L-Band Same-Day Repeat-Pass Polarimetric SAR Interferometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 95–111. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Wheeler, K.; Sadowy, G.; Miller, T.; Shaffer, S.; Muellerschoen, R.; Jones, C.; Zebker, H.; Madsen, S. UAVSAR: A new NASA airborne SAR system for science and technology research. In Proceedings of the 2006 IEEE International Radar Symposium, Verona, NY, USA, 24–27 April 2006; p. 8. [Google Scholar]
- Du, Z.; Ge, L.; Ng, A.H.-M.; Lian, X.; Zhu, Q.; Horgan, F.G.; Zhang, Q. Analysis of the impact of the South-to-North water diversion project on water balance and land subsidence in Beijing, China between 2007 and 2020. J. Hydrol. 2021, 603, 126990. [Google Scholar] [CrossRef]
- Lei, Y.; Siqueira, P.; Treuhaft, R. A physical scattering model of repeat-pass InSAR correlation for vegetation. Waves Random Complex Media 2017, 27, 129–152. [Google Scholar] [CrossRef]
- United States Geological Survey. USGS EROS Archive—Digital Elevation—Shuttle Radar Topography Mission (SRTM) 1 Arc-Second Global. Available online: https://www.usgs.gov/centers/eros/science/usgs-eros-archive-digital-elevation-shuttle-radar-topography-mission-srtm-1?qt-science_center_objects=0#qt-science_center_objects (accessed on 16 March 2023).
- Federal Ministry of Food and Agriculture German. Spruce, Pine, Beech, Oak—The Most Common Tree Species. Available online: https://www.bundeswaldinventur.de/en/third-national-forest-inventory/the-forest-habitat-more-biological-diversity-in-the-forests/spruce-pine-beech-oak-the-most-common-tree-species (accessed on 1 January 2023).
- Shi, Y.; He, B.; Liao, Z. An improved dual-baseline PolInSAR method for forest height inversion. Int. J. Appl. Earth Obs. Geoinf. 2021, 103, 102483. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive: Volume 2—Radar Remote Sensing and Surface Scattering and Emission Theory; Addison-Wesley: Reading, MA, USA, 1982. [Google Scholar]
- Cloude, S. Polarisation: Applications in Remote Sensing; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Lopez-Martinez, C.; Pottier, E.; Cloude, S.R. Statistical assessment of eigenvector-based target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2058–2074. [Google Scholar] [CrossRef] [Green Version]
- Lavalle, M.; Hensley, S. Extraction of structural and dynamic properties of forests from polarimetric-interferometric SAR data affected by temporal decorrelation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4752–4767. [Google Scholar] [CrossRef]
- Lee, J.-S.; Cloude, S.R.; Papathanassiou, K.P.; Grunes, M.R.; Woodhouse, I.H. Speckle filtering and coherence estimation of polarimetric SAR interferometry data for forest applications. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2254–2263. [Google Scholar]
- Moghaddam, M. Effect of medium symmetries on parameter estimation with polarimetric interferometry. J. Electromagn. Waves Appl. 2000, 14, 173–184. [Google Scholar] [CrossRef]
- Lee, S.; Kugler, F.; Hajnsek, I.; Papathanassiou, K.P. The impact of temporal decorrelation over forest terrain in polarimetric SAR interferometry. In Proceedings of the 2nd International Workshop POLinSAR 2009, Frascati, Italy, 26–30 January 2009. [Google Scholar]
- Lee, S.-K.; Kugler, F.; Papathanassiou, K.; Hajnsek, I. Quantification and compensation of temporal decorrelation effects in polarimetric SAR interferometry. In Proceedings of the IGARSS 2012—IEEE 2012 Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 3106–3109. [Google Scholar]
- Lee, S.-K.; Kugler, F.; Papathanassiou, K.P.; Hajnsek, I. Quantification of temporal decorrelation effects at L-band for polarimetric SAR interferometry applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1351–1367. [Google Scholar] [CrossRef]
- Lee, S.-K.; Kugler, F.; Papathanassiou, K.P.; Hajnsek, I. Quantifying temporal decorrelation over boreal forest at L-and P-band. In Proceedings of the EUSAR 2008, Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Time | Center Frequency | Polarization | Incident Angle | Temporal Baseline | Vertical Wavenumber |
|---|---|---|---|---|---|
| 31 December 2006 and 15 February 2007 | 1270 MHz | Quad | 8–30° | 46 days | 0.101–0.104 |
| 31 December 2006 and 2 April 2007 | 1270 MHz | Quad | 8–30° | 92 days | 0.117–0.120 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Zhang, Q.; Ge, L.; Sepasgozar, S.M.E.; Sheng, Z. Dielectric Fluctuation and Random Motion over Ground Model (DF-RMoG): An Unsupervised Three-Stage Method of Forest Height Estimation Considering Dielectric Property Changes. Remote Sens. 2023, 15, 1877. https://doi.org/10.3390/rs15071877
Liu C, Zhang Q, Ge L, Sepasgozar SME, Sheng Z. Dielectric Fluctuation and Random Motion over Ground Model (DF-RMoG): An Unsupervised Three-Stage Method of Forest Height Estimation Considering Dielectric Property Changes. Remote Sensing. 2023; 15(7):1877. https://doi.org/10.3390/rs15071877
Chicago/Turabian StyleLiu, Chang, Qi Zhang, Linlin Ge, Samad M. E. Sepasgozar, and Ziheng Sheng. 2023. "Dielectric Fluctuation and Random Motion over Ground Model (DF-RMoG): An Unsupervised Three-Stage Method of Forest Height Estimation Considering Dielectric Property Changes" Remote Sensing 15, no. 7: 1877. https://doi.org/10.3390/rs15071877