
A Multi-Pixel Split-Window Approach to Sea Surface Temperature Retrieval from Thermal Imagers with Relatively High Radiometric Noise: Preliminary Studies


Abstract
:1. Introduction
- The NASA-JPL/ASI Surface Biology and Geology Thermal Mission (SBG), focusing on five research and applications areas: terrestrial and aquatic ecosystems, hydrology, weather, climate and solid Earth [20].
- The Thermal infraRed Imaging Satellite for High-resolution Natural resource Assessment (TRISHNA) mission, a cooperation between the French (CNES) and Indian (ISRO) space agencies to launch a satellite in 2025 with a 5-year lifetime to measure the visible, near infrared and thermal infrared signal of the surface atmosphere system globally approximately twice a week, with a 60 m resolution for the continents and coastal oceans and a resolution of 1000 m over deep oceans [21].
- The Land Surface Temperature Monitoring (LSTM) is an ESA mission set to join the Copernicus Sentinel system in 2028. The satellite will have TIR observation capabilities over land and coastal regions in support of agriculture management services, and possibly a range of additional services. The LSTM mission will consist of two satellites [22].
- The atmospheric correction is based on a functional form that uses the SW difference;
- The scales of variability of the radiatively active atmospheric components are larger than the spatial sampling distance of the sensor.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Band | Spectral Range (m) | SSD (m) | NEdT (K) |
|---|---|---|---|---|
| S3-A SLSTR | S8 | 10.46–11.24 | 1000 | 0.014 @ 270K |
| [3] | S9 | 11.57–12.47 | 1000 | 0.022 @ 270K |
| Harmony TIR | TIR-1 | 10.40–11.30 | 1000 | 0.150 @ 280 K |
| [32] | TIR-2 | 11.40–12.50 | 1000 | 0.150 @ 280 K |
| CALIPSO IIR | TIR-2 | 10.34–10.95 | 1000 | 0.140 @ 250 K |
| [9] | TIR-3 | 11.57–11.62 | 1000 | 0.110 @ 250 K |
| ASTER | TIR-13 | 10.25–10.95 | 90 | ≈0.120 @ 285 K |
| [33] | TIR-14 | 10.95–11.65 | 90 | ≈0.150 @ 285 K |
| LANDSAT 8 TIRS | Ch-10 | 10.6–11.2 | 100 | 0.049 @ 300K |
| [34] | Ch-11 | 11.4–12.5 | 100 | 0.052 @ 300K |
| LANDSAT 9 TIRS-2 | Ch-10 | 10.3–11.3 | 100 | 0.080 @ 320K |
| [35] | Ch-11 | 11.5–12.5 | 100 | 0.080 @ 320 K |
| ECOSTRESS | Ch-5 | 10.28–10.69 | 70 | 0.110 @ 298 K |
| [36] | Ch-6 | 11.80–12.40 | 70 | 0.310 @ 298 K |
| LSTM TIR | TIR-4 | 10.70–11.10 | 37 | 0.150 @ 300 K |
| [22] | TIR-5 | 11.76–12.23 | 37 | 0.150 @ 300 K |
| TRISHNA | TIR-3 | 10.25–10.93 | 1000 @ Sea | 0.100 @ 300 K |
| [21] | TIR-4 | 11.15–12.03 | 1000 @ Sea | 0.100 @ 300 K |
| SBG | Ch-7 | 11.04–11.59 | 60 | 0.200 @ 275 K |
| [37] | Ch-8 | 11.80–12.28 | 60 | 0.200 @ 275 K |
2. Materials and Methods
2.1. SLSTR Study Cases Data-Set
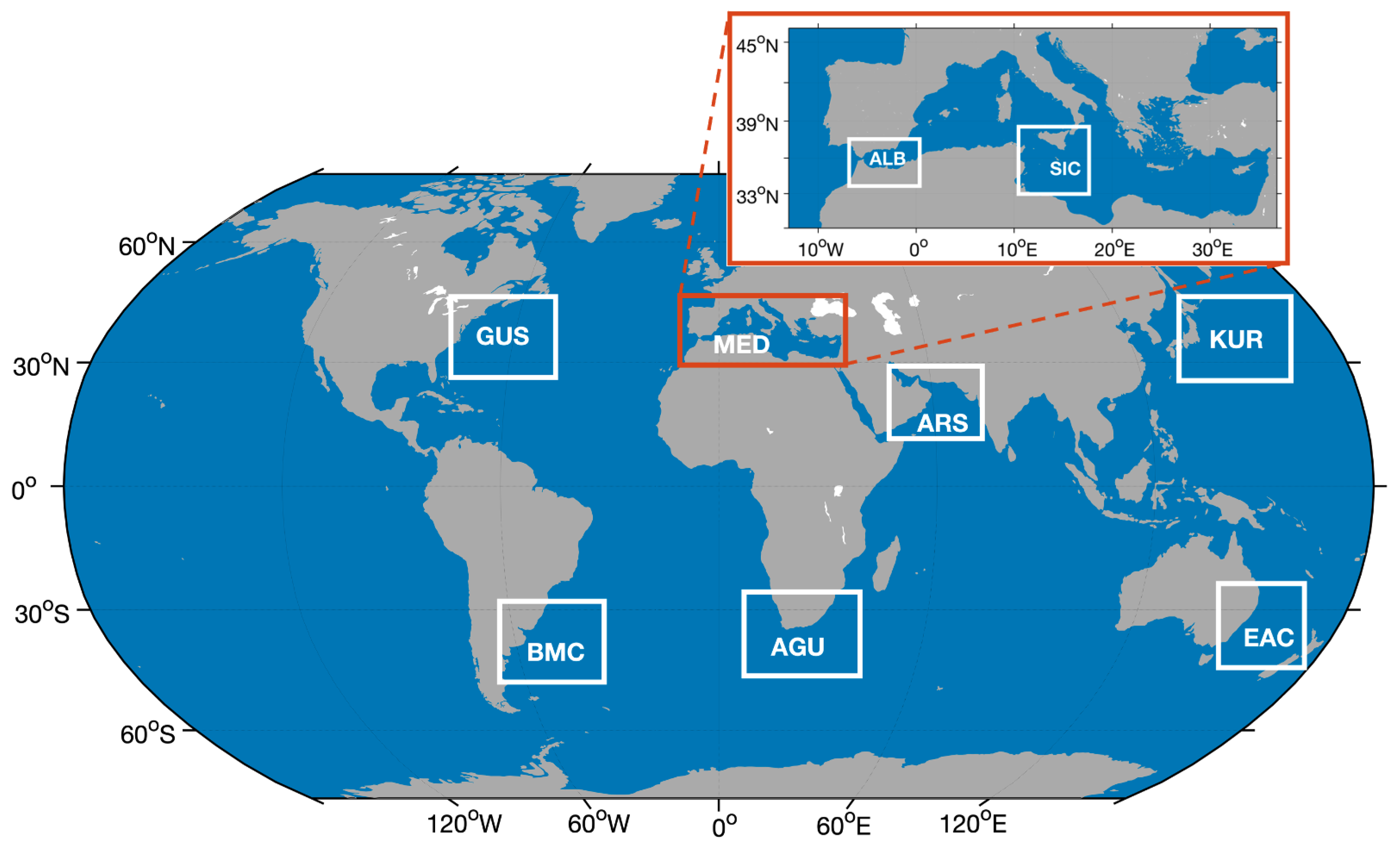
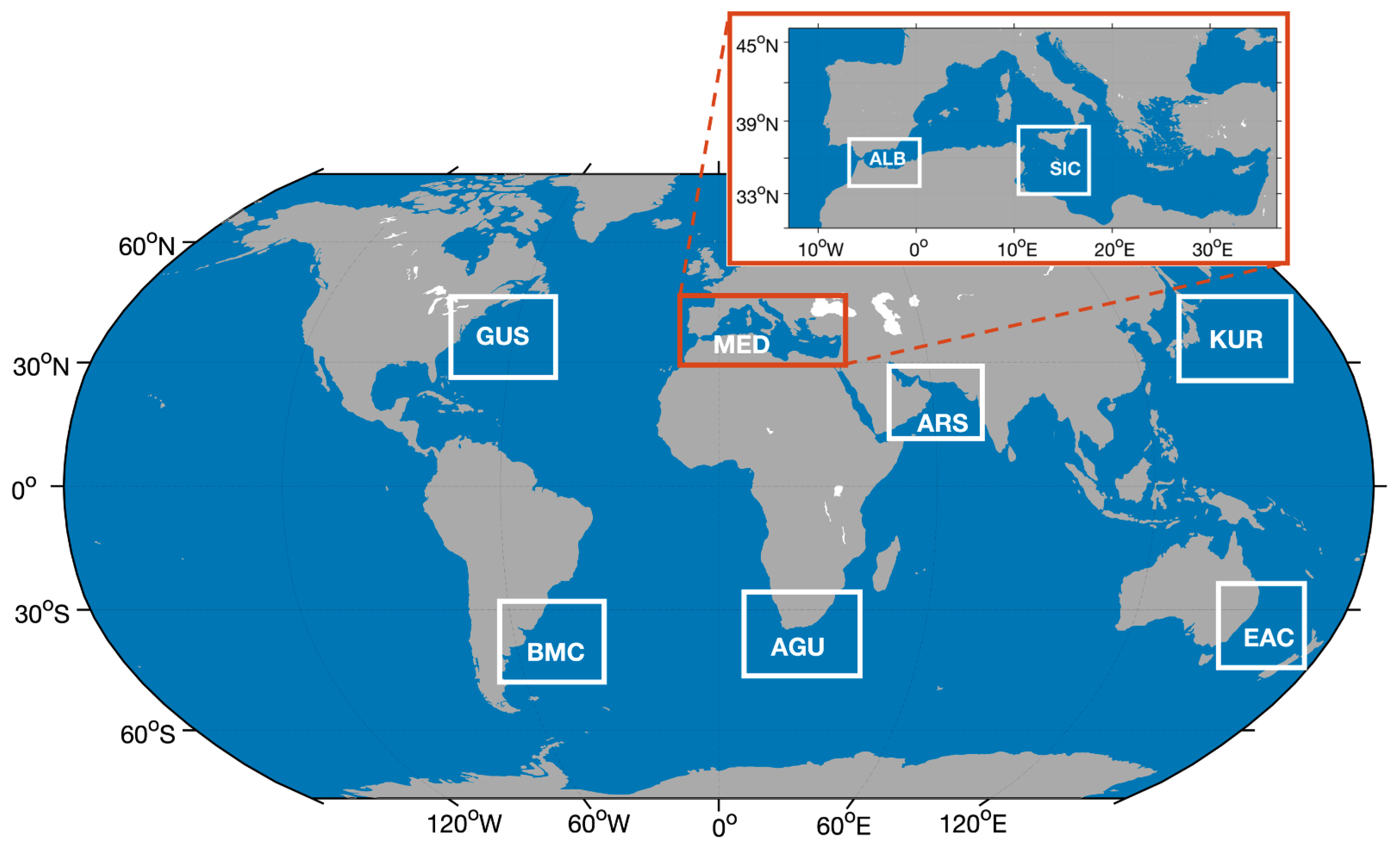
Selection of Study Cases
- Agulhas Current (AGU);
- Arabian Sea (ARS);
- Brazil Malvinas Current (BMC);
- East Australian Current (EAC);
- Gulf Stream (GUS);
- Kuroshio Current (KUR);
- Mediterranean Sea: Alboran Sea (ALB);
- Mediterranean Sea: Strait of Sicily (SIC).
2.2. Split Window Method
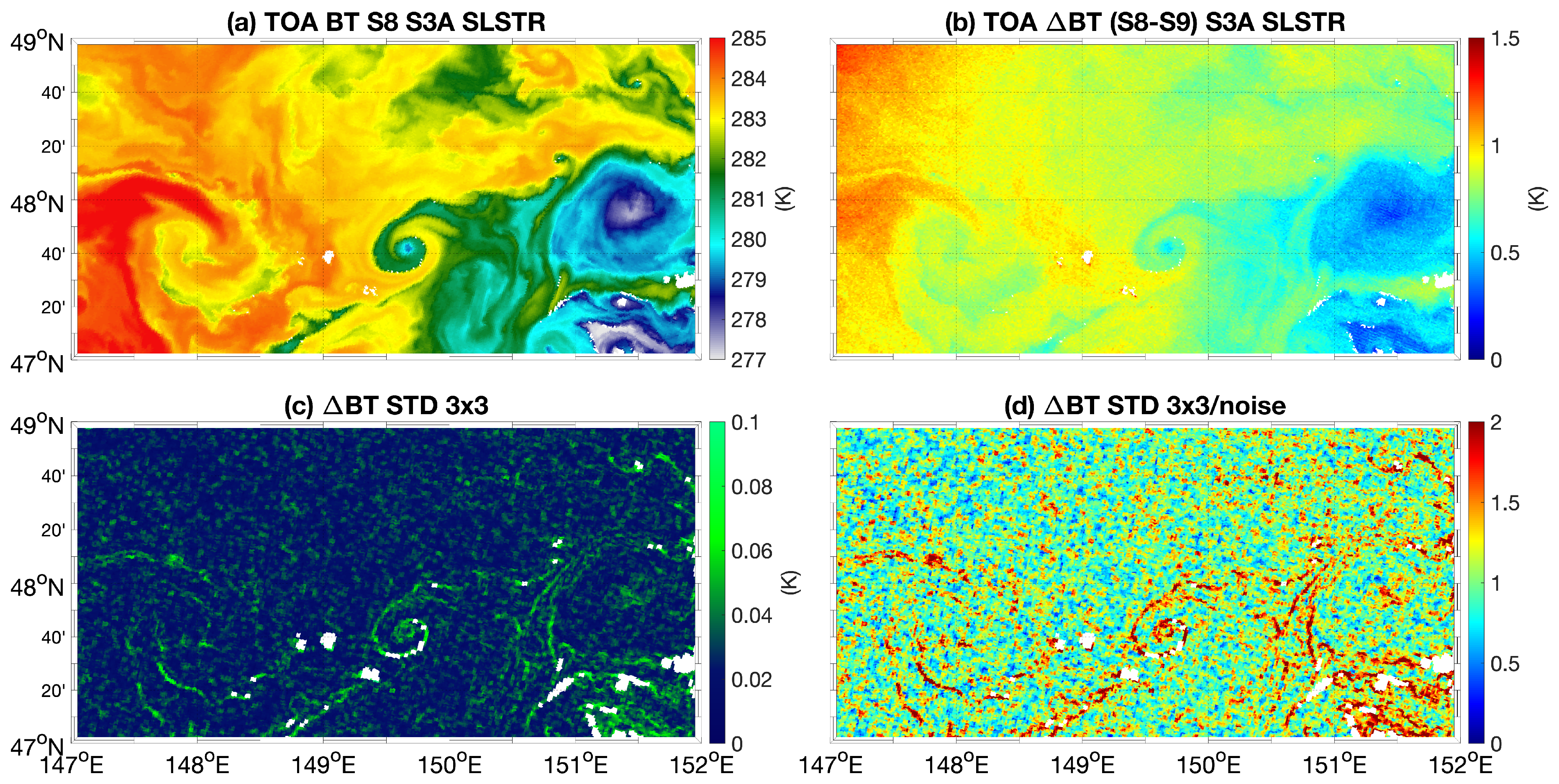
3. Evidence for the Multi-Pixel Approach
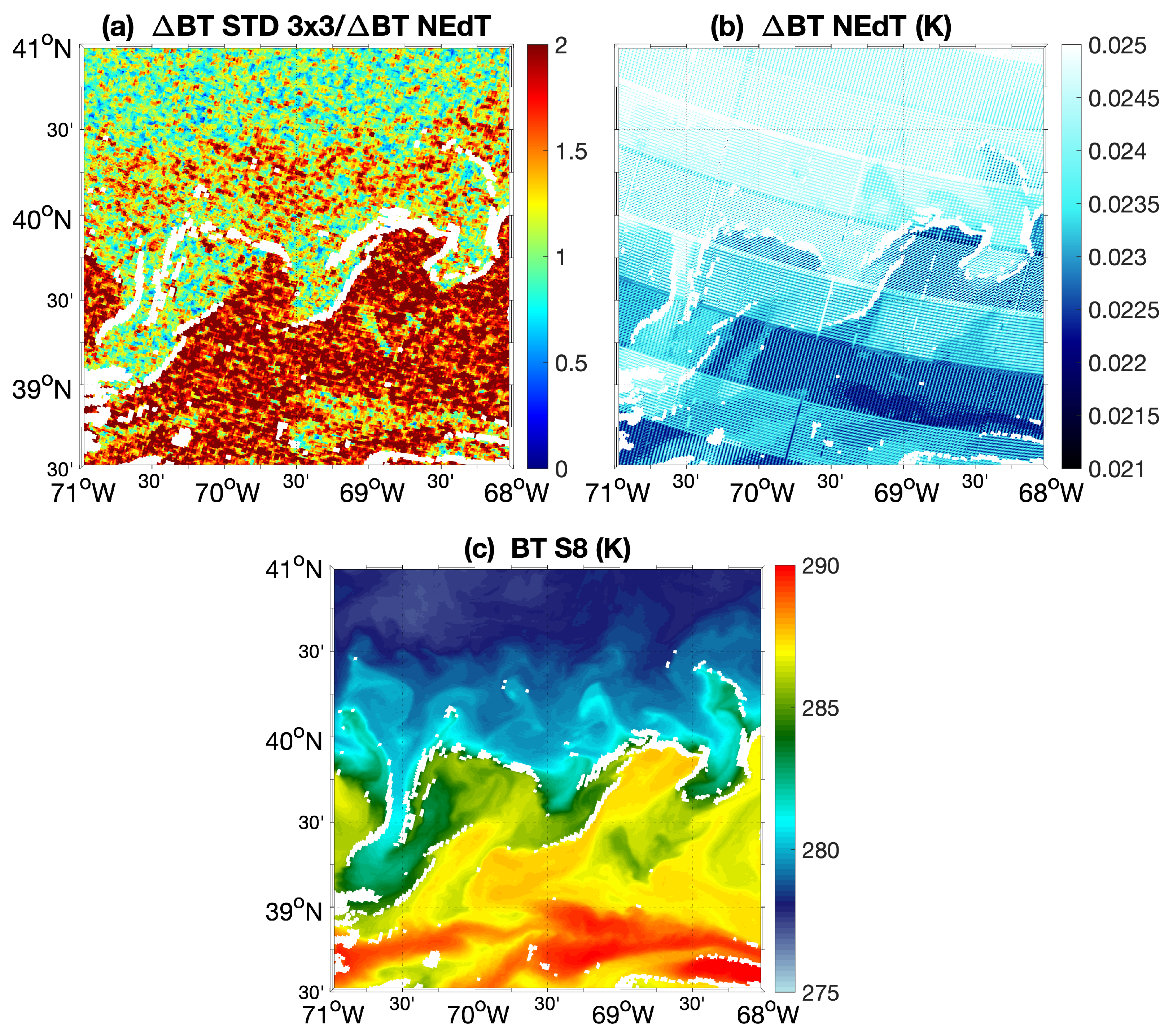
- The S8 channel TOA BT field, as a proxy for the SST field;
- The difference between the S8 and S9 channel-derived BTs corresponding to the SW difference (BT hereinafter);
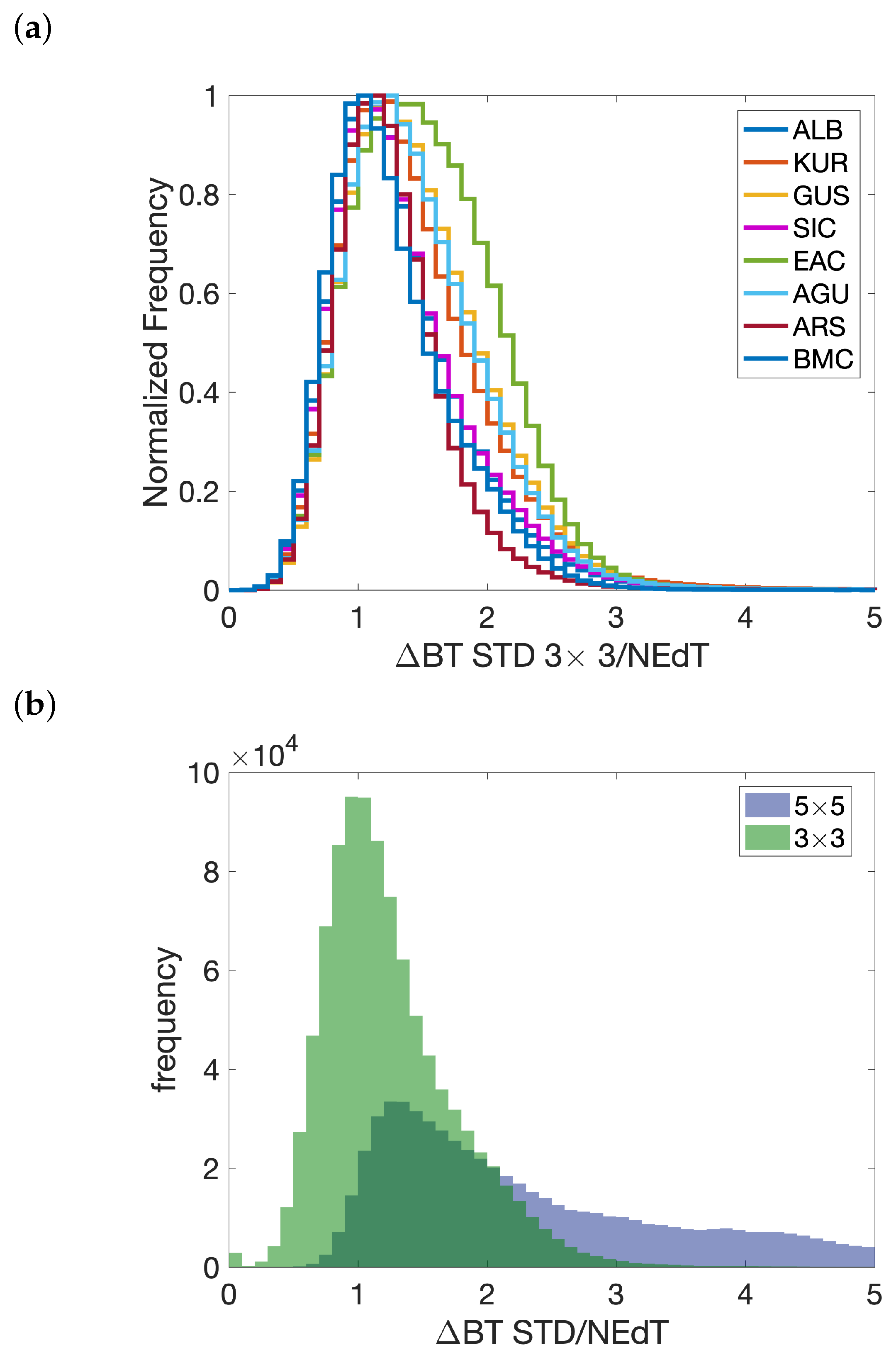
- The standard deviation over 3 × 3 pixels of the BT;
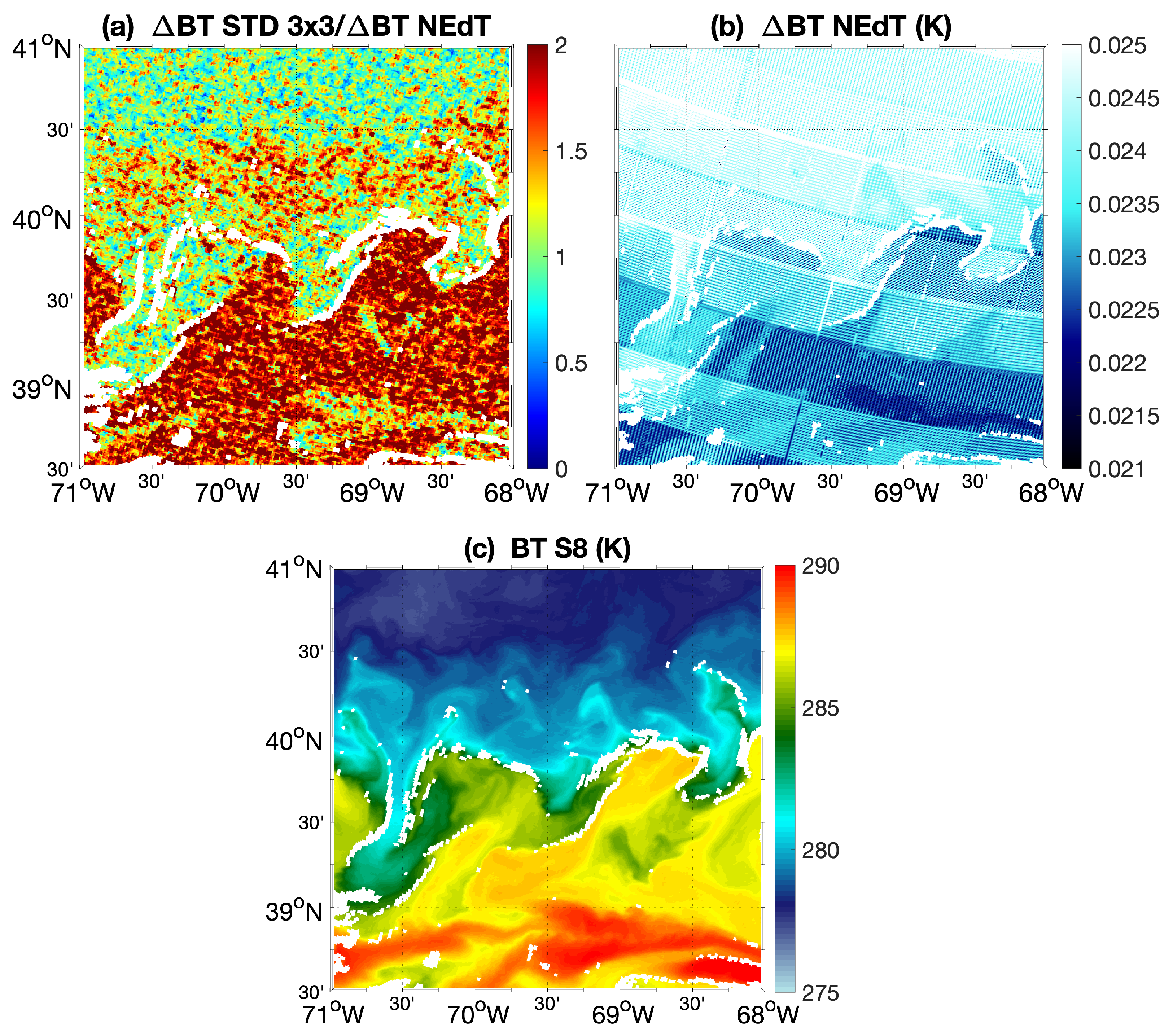
- The ratio between standard deviation of the BT and the associated noise. The latter is estimated assuming uncorrelated random noise and using the TOA BT NEdT field for each pixel/band, included in the L2 product [53].
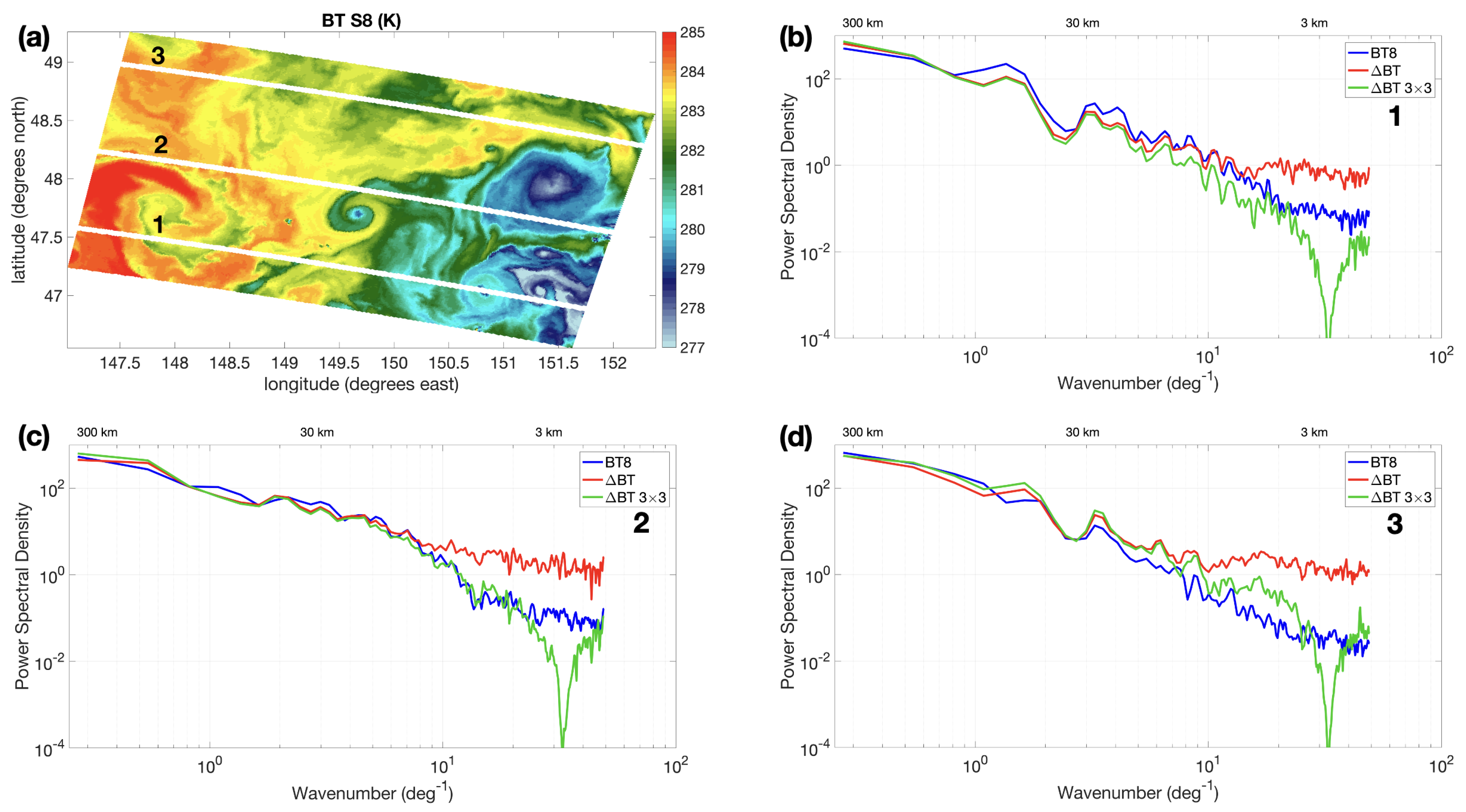
4. Results
- A region with predominance of large-scale patterns at the westernmost and easternmost zones of the scene (cross-section 1);
- An area with tiny filaments characterized by sharp temperature differences, such as the one located at ≃149.7°E−48.0°N (cross-section 2);
- An area with much smoother spatial variability (cross-section 3).
5. Discussion and Conclusions
- The local variability of the atmospheric correction term generally employed in split-window algorithms (here referred to as BT), if computed over 3 × 3 km areas, is of the same order of magnitude of the estimated BT radiometric noise;
- Spectral analyses of the BT, BT and 3 × 3 km averaged BT (performed over a specific study case) suggest that 3 × 3 smoothing on the SW term is helpful in reducing noise in the atmospheric correction procedure and obtaining a SW correction with similar spectral properties to the BT derived from channel S8. This is verified up to scales larger than 3–4 km. It is thus very likely that the SST obtained with the 3 × 3 averaged SW will benefit in terms of noise reduction/effective resolution;
- The assumption of atmospheric homogeneity over the 3 × 3 km area for the SLSTR case studies was thus supported by our findings. The horizontal extent of the atmospheric homogeneity assumption is, however, a function of the specific satellite mission and should be adapted as a function of the IR sensor SSD and radiometric characteristics.
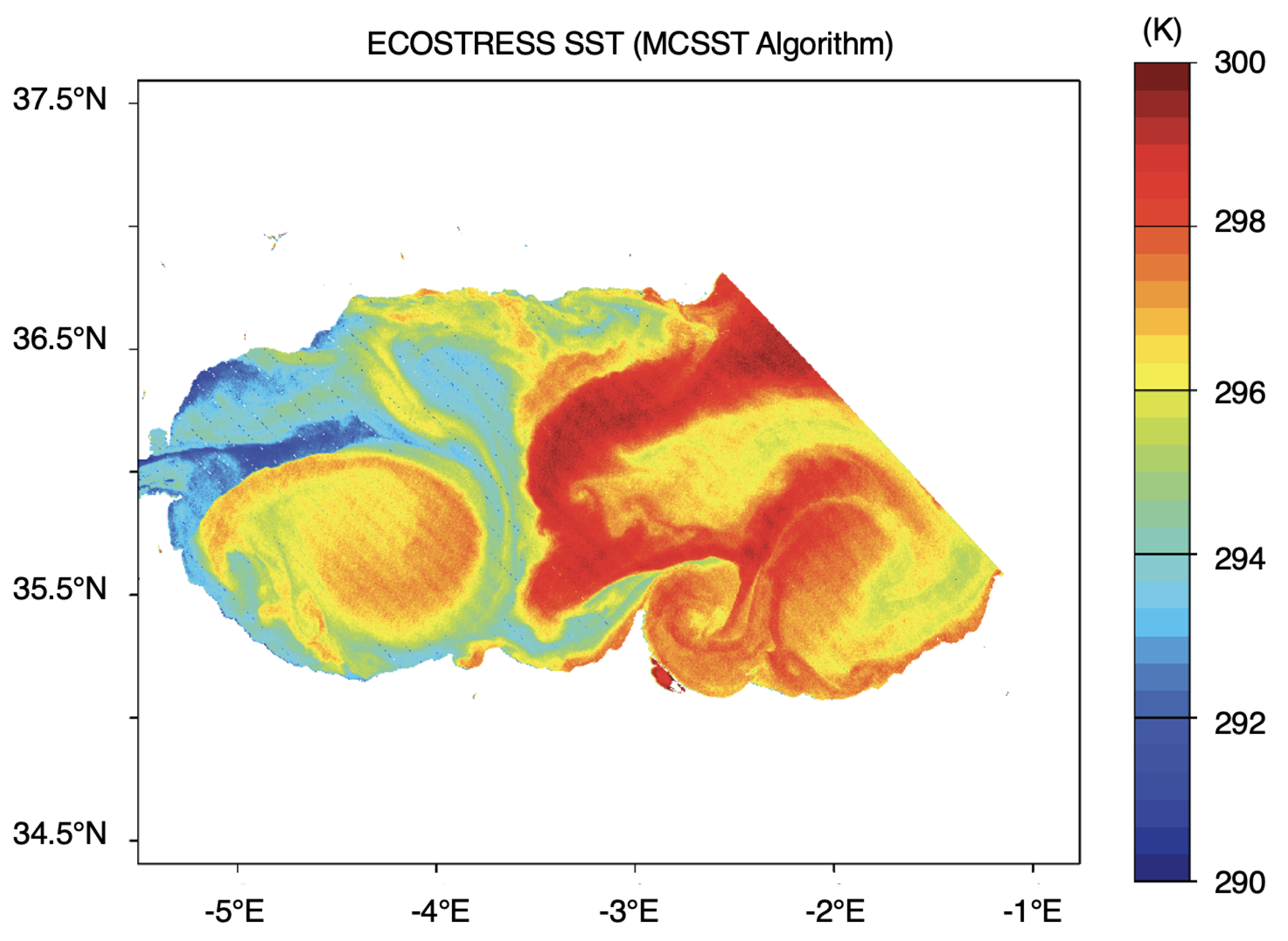
- A realistic difference due to the atmospheric response to SST gradients;
- An artefact due to inter-channel co-registration issues;
- ECOSTRESS_L1B_GEO_17857_004_20210830T022642_0601_01.h5;
- ECOSTRESS_L1B_RAD_17857_004_20210830T022642_0601_01.h5;
- ECOSTRESS_L2_LSTE_17857_004_20210830T022642_0601_01.h5.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Minnett, P.; Alvera-Azcárate, A.; Chin, T.; Corlett, G.; Gentemann, C.; Karagali, I.; Li, X.; Marsouin, A.; Marullo, S.; Maturi, E.; et al. Half a century of satellite remote sensing of sea-surface temperature. Remote Sens. Environ. 2019, 233, 111366. [Google Scholar] [CrossRef]
- Oudrari, H.; McIntire, J.; Xiong, X.; Butler, J.; Ji, Q.; Schwarting, T.; Lee, S.; Efremova, B. JPSS-1 VIIRS Radiometric Characterization and Calibration Based on Pre-Launch Testing. Remote Sens. 2016, 8, 41. [Google Scholar] [CrossRef]
- Coppo, P.; Mastrandrea, C.; Stagi, M.; Calamai, L.; Barilli, M.; Nieke, J. The Sea and Land Surface Temperature Radiometer (SLSTR) Detection Assembly design and performance. Proc. SPIE 2013, 8, 14. [Google Scholar] [CrossRef]
- Wallner, O.; Reinert, T.; Straif, C. METIMAGE: A spectro-radiometer for the VII mission onboard METOP-SG. In Proceedings of the International Conference on Space Optics—ICSO, Biarritz, France, 18–21 October 2016; Volume 10562, p. 105620E. [Google Scholar]
- McMillin, L.; Crosby, D. Theory and validation of the multiple window sea surface temperature technique. J. Geophys. Res. Ocean. 1984, 89, 3655–3661. [Google Scholar]
- McMillin, L.; Crosby, D. Some physical interpretations of statistically derived coefficients for split-window corrections to satellite-derived sea surface temperatures. Q. J. R. Meteorol. Soc. 1985, 111, 867–871. [Google Scholar] [CrossRef]
- Sobrino, J.; Li, Z.; Stoll, M.; Becker, F. Multi-channel and multi-angle algorithms for estimating sea and land surface temperature with ATSR data. Int. J. Remote Sens. 1996, 17, 2089–2114. [Google Scholar] [CrossRef]
- Merchant, C.; Le Borgne, P.; Marsouin, A.; Roquet, H. Optimal estimation of sea surface temperature from split-window observations. Remote Sens. Environ. 2008, 112, 2469–2484. [Google Scholar] [CrossRef]
- Corlay, G.; Arnolfo, M.C.; Bret-Dibat, T.; Lifferman, A.; Pelon, J. The infrared imaging radiometer for PICASSO-CENA. In Proceedings of the International Conference on Space Optics—ICSO 2000, Toulouse Labège, France, 5–7 December 2000; Otrio, G., Ed.; 2017; Volume 10569, p. 105690. [Google Scholar] [CrossRef]
- López-Dekker, P.; Rott, H.; Prats-Iraola, P.; Chapron, B.; Scipal, K.; De Witte, E. Harmony: An Earth explorer 10 mission candidate to observe land, ice, and ocean surface dynamics. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 8381–8384. [Google Scholar]
- Ciani, D.; Sabatini, M.; Buongiorno Nardelli, B.; Lopez Dekker, P.; Rommen, B.; Wethey, D.S.; Yang, C.; Liberti, G.L. Sea Surface Temperature Gradients Estimation Using Top-of-Atmosphere Observations from the ESA Earth Explorer 10 Harmony Mission: Preliminary Studies. Remote Sens. 2023, 15, 1163. [Google Scholar] [CrossRef]
- López-Dekker, P.; Biggs, J.; Chapron, B.; Hooper, A.; Kääb, A.; Masina, S.; Mouginot, J.; Buongiorno Nardelli, B.; Pasquero, C.; Prats-Iraola, P.; et al. The Harmony mission: End of phase-0 science overview. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 7752–7755. [Google Scholar]
- Yamaguchi, Y.; Fujisada, H.; Kudoh, M.; Kawakami, T.; Tsu, H.; Kahle, A.; Pniel, M. ASTER instrument characterization and operation scenario. Adv. Space Res. 1999, 23, 1415–1424. [Google Scholar] [CrossRef]
- Lee, C.M.; Cable, M.L.; Hook, S.J.; Green, R.O.; Ustin, S.L.; Mandl, D.J.; Middleton, E.M. An introduction to the NASA Hyperspectral InfraRed Imager (HyspIRI) mission and preparatory activities. Remote Sens. Environ. 2015, 167, 6–19. [Google Scholar] [CrossRef]
- Reuter, D.C.; Richardson, C.M.; Pellerano, F.A.; Irons, J.R.; Allen, R.G.; Anderson, M.; Jhabvala, M.D.; Lunsford, A.W.; Montanaro, M.; Smith, R.L.; et al. The Thermal Infrared Sensor (TIRS) on Landsat 8: Design Overview and Pre-Launch Characterization. Remote Sens. 2015, 7, 1135–1153. [Google Scholar] [CrossRef]
- Masek, J.G.; Wulder, M.A.; Markham, B.; McCorkel, J.; Crawford, C.J.; Storey, J.; Jenstrom, D.T. Landsat 9: Empowering open science and applications through continuity. Remote Sens. Environ. 2020, 248, 111968. [Google Scholar] [CrossRef]
- Ryan, J.P.; Chavez, F.P.; Bellingham, J.G. Physical-biological coupling in Monterey Bay, California: Topographic influences on phytoplankton ecology. Mar. Ecol. Prog. Ser. 2005, 287, 23–32. [Google Scholar]
- Trinh, R.C.; Fichot, C.G.; Gierach, M.M.; Holt, B.; Malakar, N.K.; Hulley, G.; Smith, J. Application of Landsat 8 for Monitoring Impacts of Wastewater Discharge on Coastal Water Quality. Front. Mar. Sci. 2017, 4, 329. [Google Scholar] [CrossRef]
- Wang, D.; Pan, D.; Wei, J.A.; Gong, F.; Zhu, Q.; Chen, P. Monitoring thermal discharge from a nuclear plant through Landsat 8. In Proceedings of the Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions, Edinburgh, UK, 26–27 September 2016; Bostater, C.R., Jr., Mertikas, S.P., Neyt, X., Nichol, C., Aldred, O., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, DC, USA, 2016; Volume 9999, p. 99991E. [Google Scholar] [CrossRef]
- Cawse-Nicholson, K.; Townsend, P.A.; Schimel, D.; Assiri, A.M.; Blake, P.L.; Buongiorno, M.F.; Campbell, P.; Carmon, N.; Casey, K.A.; Correa-Pabón, R.E.; et al. NASA’s surface biology and geology designated observable: A perspective on surface imaging algorithms. Remote Sens. Environ. 2021, 257, 112349. [Google Scholar] [CrossRef]
- Lagouarde, J.P.; Bhattacharya, B.; Crébassol, P.; Gamet, P.; Babu, S.S.; Boulet, G.; Briottet, X.; Buddhiraju, K.; Cherchali, S.; Dadou, I.; et al. The Indian-French Trishna Mission: Earth Observation in the Thermal Infrared with High Spatio-Temporal Resolution. In Proceedings of the IGARSS 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 4078–4081. [Google Scholar] [CrossRef]
- Koetz, B.; Bastiaanssen, W.; Berger, M.; Defourney, P.; Del Bello, U.; Drusch, M.; Drinkwater, M.; Duca, R.; Fernandez, V.; Ghent, D.; et al. High Spatio- Temporal Resolution Land Surface Temperature Mission - a Copernicus Candidate Mission in Support of Agricultural Monitoring. In Proceedings of the IGARSS 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8160–8162. [Google Scholar] [CrossRef]
- Dalu, G.A. Satellite remote sensing of atmospheric water vapour. Int. J. Remote Sens. 1986, 7, 1089–1097. [Google Scholar] [CrossRef]
- Vincent, R.F.; Marsden, R.F.; Minnett, P.J.; Creber, K.A.M.; Buckley, J.R. Arctic waters and marginal ice zones: A composite Arctic sea surface temperature algorithm using satellite thermal data. J. Geophys. Res. Ocean. 2008, 113, C04021. [Google Scholar] [CrossRef]
- Coll, C.; Caselles, V.; Valor, E. Atmospheric correction and determination of sea surface temperature in midlatitudes from NOAA-AVHRR data. Atmos. Res. 1993, 30, 233–250. [Google Scholar] [CrossRef]
- Barton, I.J. Digitization effects in AVHRR and MCSST data. Remote Sens. Environ. 1989, 29, 87–89. [Google Scholar] [CrossRef]
- Petrenko, B.; Ignatov, A.; Kihai, Y. Suppressing the noise in SST retrieved from satellite infrared measurements by smoothing the differential terms in regression equations. In Proceedings of the Ocean Sensing and Monitoring VII, Baltimore, MD, USA, 21–22 April 2015; Hou, W.W., Arnone, R.A., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, DC, USA, 2015; Volume 9459, p. 94590U. [Google Scholar] [CrossRef]
- Merchant, C.; Le Borgne, P.; Roquet, H.; Legendre, G. Extended optimal estimation techniques for sea surface temperature from the Spinning Enhanced Visible and Infra-Red Imager (SEVIRI). Remote Sens. Environ. 2013, 131, 287–297, Corrigendum to Remote 100 Sens. Environ. 2013, 137, 331–332. [Google Scholar] [CrossRef]
- Závody, A.M.; Mutlow, C.T.; Llewellyn-Jones, D.T. A radiative transfer model for sea surface temperature retrieval for the along-track scanning radiometer. J. Geophys. Res. Ocean. 1995, 100, 937–952. [Google Scholar] [CrossRef]
- Harris, A.R.; Saunders, M.A. Global validation of the along-track scanning radiometer against drifting buoys. J. Geophys. Res. Ocean. 1996, 101, 12127–12140. [Google Scholar] [CrossRef]
- Dubovik, O.; Fuertes, D.; Litvinov, P.; Lopatin, A.; Lapyonok, T.; Doubovik, I.; Xu, F.; Ducos, F.; Chen, C.; Torres, B.; et al. A Comprehensive Description of Multi-Term LSM for Applying Multiple a Priori Constraints in Problems of Atmospheric Remote Sensing: GRASP Algorithm, Concept, and Applications. Front. Remote Sens. 2021, 2, 706851. [Google Scholar] [CrossRef]
- ESA. Report for Mission Selection: Earth Explorer 10 Candidate Mission Harmony. 2022. Available online: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/Preparing_for_tomorrow/Scientific_and_technical_mission_documents (accessed on 4 February 2023).
- Arai, K.; Tonooka, H. Radiometric performance evaluation of ASTER VNIR, SWIR, and TIR. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2725–2732. [Google Scholar] [CrossRef]
- Montanaro, M.; Levy, R.; Markham, B. On-Orbit Radiometric Performance of the Landsat 8 Thermal Infrared Sensor. Remote Sens. 2014, 6, 11753–11769. [Google Scholar] [CrossRef]
- Pearlman, A.; Efremova, B.; Montanaro, M.; Lunsford, A.; Reuter, D.; McCorkel, J. Landsat 9 Thermal Infrared Sensor 2 On-Orbit Calibration and Initial Performance. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1002608. [Google Scholar] [CrossRef]
- Johnson, W.R.; Hook, S.J.; Schmitigal, W.; Goullioud, R. ECOSTRESS End-to-End Radiometric Pre-Flight Calibration and Validation; Technical Report; Jet Propulsion Laboratory, National Aeronautics and Space Administration (JPL-NASA): La Cañada Flintridge, CA, USA, 2018. [Google Scholar]
- Basilio, R.R.; Hook, S.J.; Zoffoli, S.; Buongiorno, M.F. Surface Biology and Geology (SBG) Thermal Infrared (TIR) Free-Flyer Concept. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MN, USA, 5–12 March 2022; pp. 1–9. [Google Scholar]
- Gardner, W.; Mishonov, A.; Richardson, M. Decadal comparisons of particulate matter in repeat transects in the Atlantic, Pacific, and Indian Ocean basins. Geophys. Res. Lett. 2018, 45, 277–286. [Google Scholar] [CrossRef]
- Pujol, M.I.; Larnicol, G. Mediterranean sea eddy kinetic energy variability from 11 years of altimetric data. J. Mar. Syst. 2005, 58, 121–142. [Google Scholar] [CrossRef]
- Izumo, T.; Montégut, C.B.; Luo, J.J.; Behera, S.K.; Masson, S.; Yamagata, T. The role of the western Arabian Sea upwelling in Indian monsoon rainfall variability. J. Clim. 2008, 21, 5603–5623. [Google Scholar] [CrossRef]
- Weeks, S.; Barlow, R.; Roy, C.; Shillington, F. Remotely sensed variability of temperature and chlorophyll in the southern Benguela: Upwelling frequency and phytoplankton response. Afr. J. Mar. Sci. 2006, 28, 493–509. [Google Scholar] [CrossRef]
- Frenger, I.; Gruber, N.; Knutti, R.; Münnich, M. Imprint of Southern Ocean eddies on winds, clouds and rainfall. Nat. Geosci. 2013, 6, 608–612. [Google Scholar] [CrossRef]
- Robinson, I.S. Measuring the Oceans from Space: The Principles and Methods of Satellite Oceanography; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- François, C.; Brisson, A.; Le Borgne, P.; Marsouin, A. Definition of a radiosounding database for sea surface brightness temperature simulations: Application to sea surface temperature retrieval algorithm determination. Remote Sens. Environ. 2002, 81, 309–326. [Google Scholar] [CrossRef]
- Walton, C.C. A review of differential absorption algorithms utilized at NOAA for measuring sea surface temperature with satellite radiometers. Remote Sens. Environ. 2016, 187, 434–446. [Google Scholar] [CrossRef]
- Merchant, C.J.; Harris, A.R.; Roquet, H.; Le Borgne, P. Retrieval characteristics of non-linear sea surface temperature from the Advanced Very High Resolution Radiometer. Geophys. Res. Lett. 2009, 36, L17604. [Google Scholar] [CrossRef]
- Matsuoka, Y.; Kawamura, H.; Sakaida, F.; Hosoda, K. Retrieval of high-resolution sea surface temperature data for Sendai Bay, Japan, using the Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER). Remote Sens. Environ. 2011, 115, 205–213. [Google Scholar] [CrossRef]
- Jang, J.C.; Park, K.A. High-Resolution Sea Surface Temperature Retrieval from Landsat 8 OLI/TIRS Data at Coastal Regions. Remote Sens. 2019, 11, 2687. [Google Scholar] [CrossRef]
- Weidberg, N.; Wethey, D.S.; Woodin, S.A. Global Intercomparison of Hyper-Resolution ECOSTRESS Coastal Sea Surface Temperature Measurements from the Space Station with VIIRS-N20. Remote Sens. 2021, 13, 5021. [Google Scholar] [CrossRef]
- Gladkova, I.; Ignatov, A.; Semenov, A. Analysis of ABI bands and regressors in the ACSPO GEO NLSST algorithm. In Proceedings of the Ocean Sensing and Monitoring XIV, Orlando, FL, USA, 3–7 April 2022; Hou, W.W., Mullen, L.J., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, DC, USA, 2022; Volume 12118, p. 1211804. [Google Scholar] [CrossRef]
- Barsugli, J.J.; Battisti, D.S. The basic effects of atmosphere–ocean thermal coupling on midlatitude variability. J. Atmos. Sci. 1998, 55, 477–493. [Google Scholar] [CrossRef]
- Nilsson, J. Propagation, diffusion, and decay of SST anomalies beneath an advective atmosphere. J. Phys. Oceanogr. 2000, 30, 1505–1513. [Google Scholar] [CrossRef]
- STFC. SLSTR: Algorithm Theoretical Basis Definition Document for Level 1 Observables 2017. Available online: https://www.eumetsat.int/media/38643 (accessed on 4 February 2023).
- Woollings, T.; Hoskins, B.; Blackburn, M.; Hassell, D.; Hodges, K. Storm track sensitivity to sea surface temperature resolution in a regional atmosphere model. Clim. Dyn. 2010, 35, 341–353. [Google Scholar] [CrossRef]
- Messager, C.; Swart, S. Significant atmospheric boundary layer change observed above an Agulhas Current warm cored eddy. Adv. Meteorol. 2016, 2016, 3659657. [Google Scholar] [CrossRef]
- Droghei, R.; Nardelli, B.B.; Santoleri, R. Combining in situ and satellite observations to retrieve salinity and density at the ocean surface. J. Atmos. Ocean. Technol. 2016, 33, 1211–1223. [Google Scholar] [CrossRef]
- Hook, S.; Smyth, M.; Logan, T.; Johnson, W. ECO1BGEO.001. ECOSTRESS Geolocation Daily L1B Global 70 m V001; NASA EOSDIS Land Processes DAAC: Sioux Falls, DA, USA, 2019. [Google Scholar] [CrossRef]
- Hook, S.; Smyth, M.; Logan, T.; Johnson, W. ECOSTRESS at Sensor Calibrated Radiance Daily L1B Global 70 m V001; NASA EOSDIS Land Processes DAAC: Sioux Falls, DA, USA, 2019. [Google Scholar] [CrossRef]
- Von Neumann, J. Distribution of the ratio of the mean square successive difference to the variance. Ann. Math. Stat. 1941, 12, 367–395. [Google Scholar] [CrossRef]
- Dionisi, D.; Liberti, G.L.; Congeduti, F. Variable Integration Domain technique for Multichannel Raman Water Vapour Lidar Measurements. In Proceedings of the 26th International Laser Radar Conference (ILRC 2012), Peloponnesus, Greece, 25–29 June 2012. [Google Scholar]


| Area | ALB | KUR | GUS | SIC | EAC | AGU | ARS | BMC |
|---|---|---|---|---|---|---|---|---|
| # of pixels | 82,063 | 753,093 | 310,954 | 54,144 | 977,778 | 225,980 | 364,789 | 449,818 |
| D/M/Y | 01/05/2022 | 21/02/2021 | 02/12/2021 | 01/01/2022 | 26/07/2022 | 02/02/2021 | 18/08/2022 | 04/11/2022 |
| 25/08/2022 | 11/05/2021 | 30/03/2021 | 03/10/2022 | 16/01/2022 | 02/05/2021 | 18/02/2022 | 18/02/2022 | |
| 15/11/2021 | 19/09/2021 | 29/06/2021 | 07/07/2022 | 04/04/2022 | 11/08/2021 | 18/05/2022 | 31/08/2022 | |
| 01/02/2022 | 28/11/2021 | 01/09/2021 | 13/04/2022 | 14/10/2022 | 28/12/2022 | 19/11/2022 | 08/05/2022 | |
| UTC-H:m | 09:45 | 00:31 | 12:56 | 08:15 | 21:02 | 06:28 | 17:05 | 11:39 |
| 09:38 | 23:17 | 14:01 | 19:32 | 21:15 | 06:21 | 05:10 | 11:54 | |
| 09:36 | 23:20 | 13:01 | 20:15 | 21:32 | 06:02 | 05:03 | 11:24 | |
| 09:13 | 00:33 | 13:43 | 20:19 | 21:28 | 06:53 | 05:07 | 11:45 | |
| S3 platform | A | A | A | A | A | B | B | B |
| A | A | B | A | B | B | B | B | |
| B | A | B | B | A | B | B | B | |
| B | B | B | B | A | A | B | A |
| a | a | a | a |
|---|---|---|---|
| −60.177896 | 1.217641 | −0.99949 | 3.681225 |
| Equation Term | No Smoothing | 3 × 3 | 11 × 11 | 51 × 51 |
|---|---|---|---|---|
| a + a × S | 0.1369 | 0.0056 | 0.0012 | 0.0002 |
| BT | 0.1039 | |||
| BT | 0.3385 | |||
| BT | 0.2804 | 0.0753 | 0.0153 | 0.0024 |
| ECOSTRESS MC SST | 0.1280 | 0.1266 | 0.1261 | 0.1264 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liberti, G.L.; Sabatini, M.; Wethey, D.S.; Ciani, D. A Multi-Pixel Split-Window Approach to Sea Surface Temperature Retrieval from Thermal Imagers with Relatively High Radiometric Noise: Preliminary Studies. Remote Sens. 2023, 15, 2453. https://doi.org/10.3390/rs15092453
Liberti GL, Sabatini M, Wethey DS, Ciani D. A Multi-Pixel Split-Window Approach to Sea Surface Temperature Retrieval from Thermal Imagers with Relatively High Radiometric Noise: Preliminary Studies. Remote Sensing. 2023; 15(9):2453. https://doi.org/10.3390/rs15092453
Chicago/Turabian StyleLiberti, Gian Luigi, Mattia Sabatini, David S. Wethey, and Daniele Ciani. 2023. "A Multi-Pixel Split-Window Approach to Sea Surface Temperature Retrieval from Thermal Imagers with Relatively High Radiometric Noise: Preliminary Studies" Remote Sensing 15, no. 9: 2453. https://doi.org/10.3390/rs15092453
APA StyleLiberti, G. L., Sabatini, M., Wethey, D. S., & Ciani, D. (2023). A Multi-Pixel Split-Window Approach to Sea Surface Temperature Retrieval from Thermal Imagers with Relatively High Radiometric Noise: Preliminary Studies. Remote Sensing, 15(9), 2453. https://doi.org/10.3390/rs15092453