



Analysis of Road Surface Texture for Asphalt Pavement Adhesion Assessment Using 3D Laser Technology

 ,
,
Abstract
:1. Introduction
2. Methodology
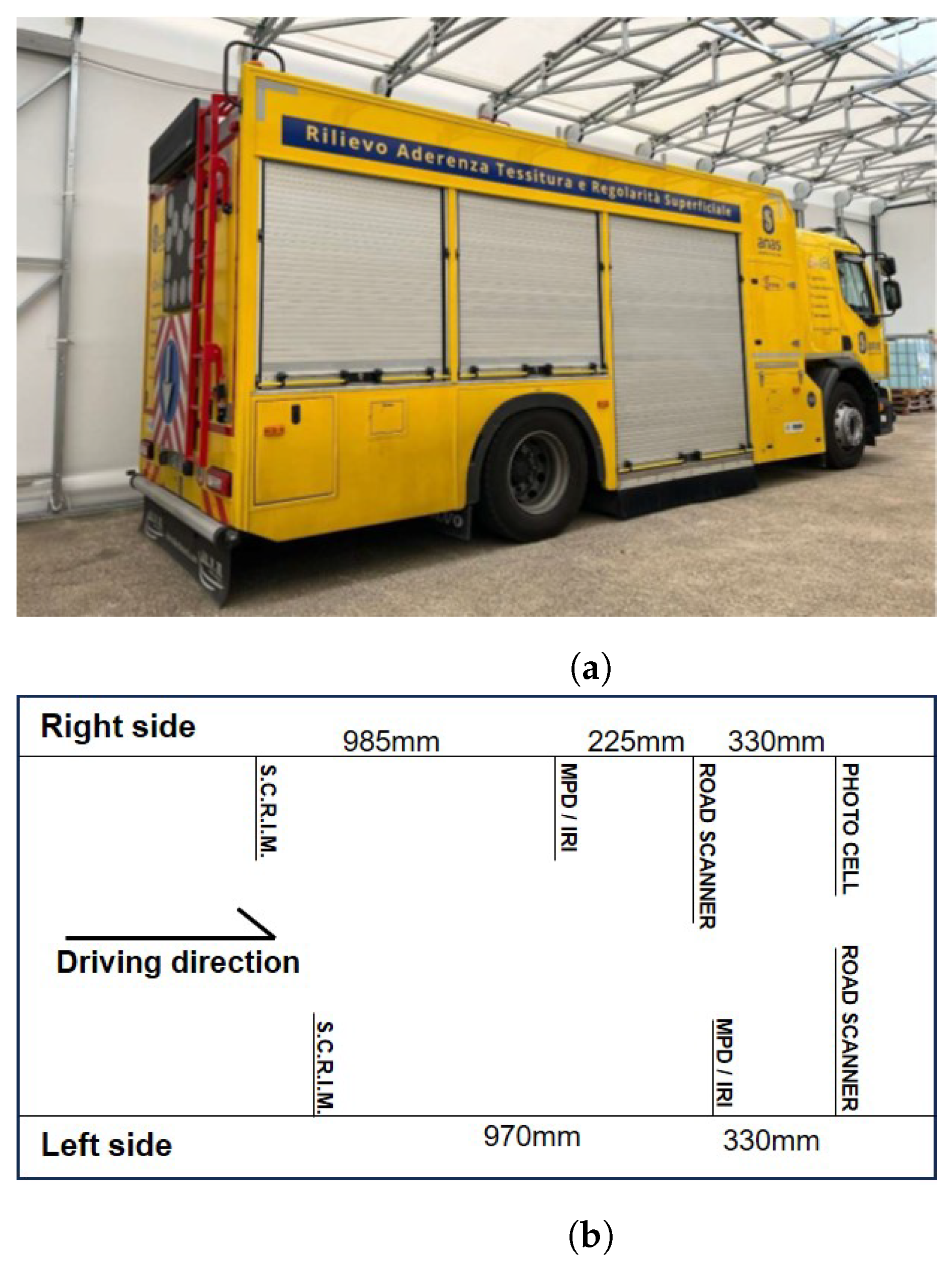
2.1. E.R.M.E.S. Instrument
2.2. S.C.R.I.M System for Pavement Adhesion Collection
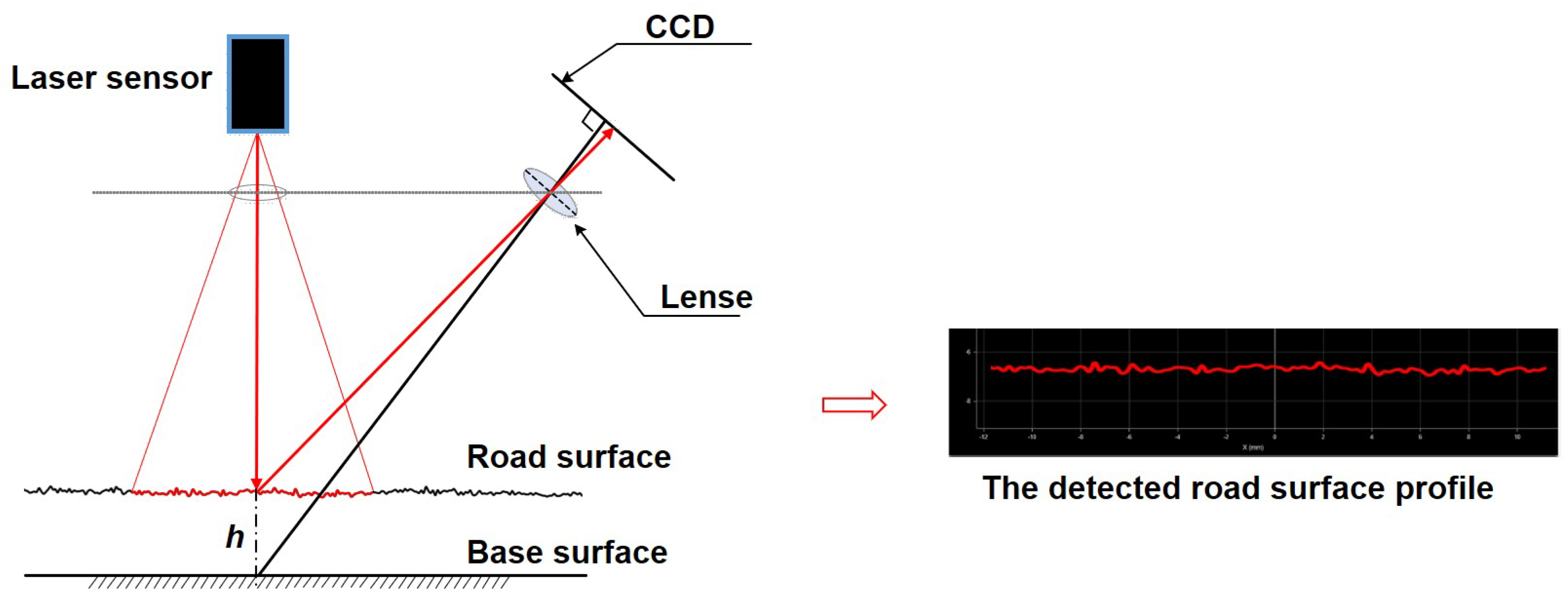
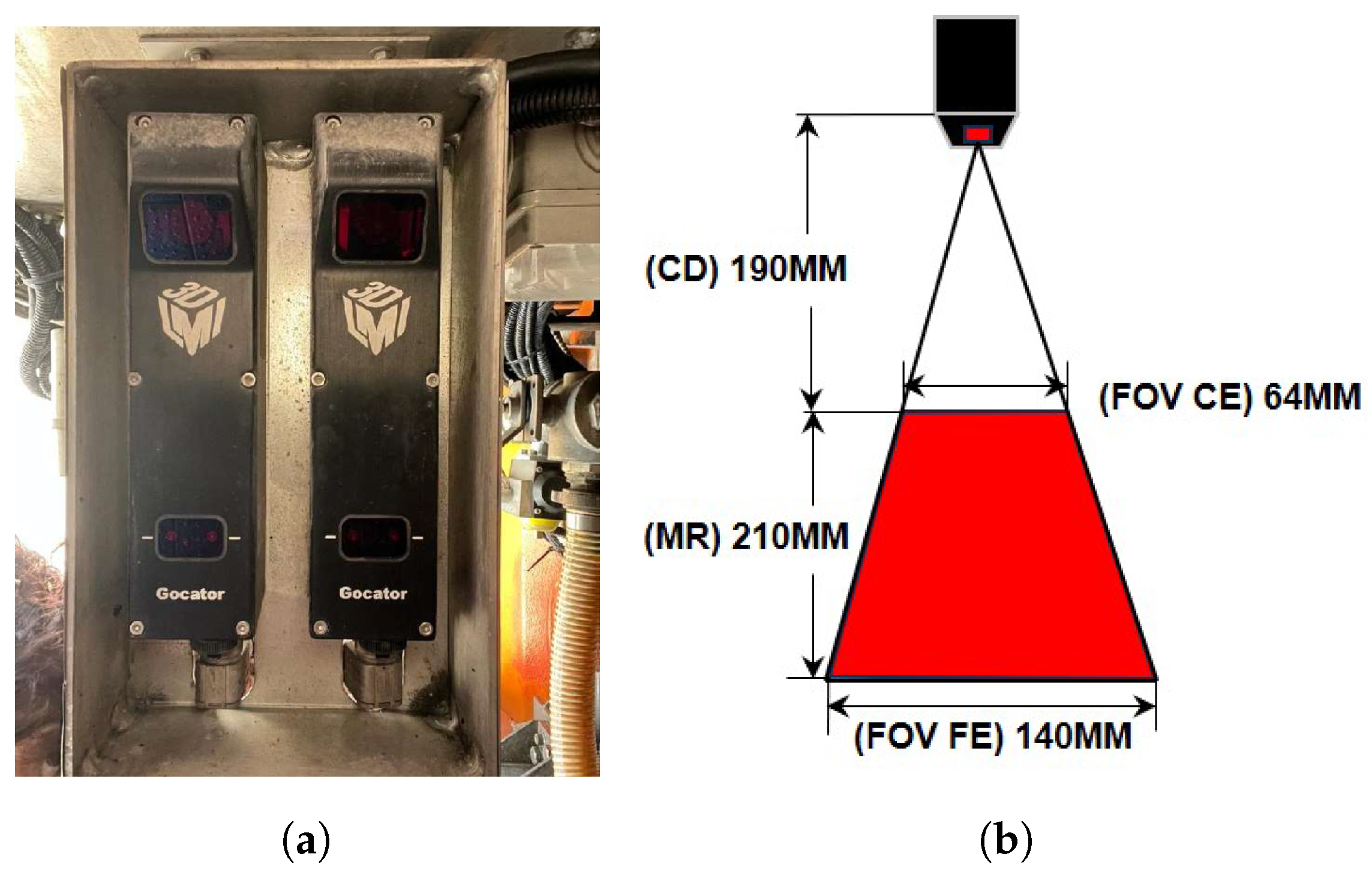
2.3. Road Scanner System for 3D Data Collection
2.4. 3D Texture Data Collection and Processing
2.4.1. 3D Data Extraction and Pavement Reconstruction
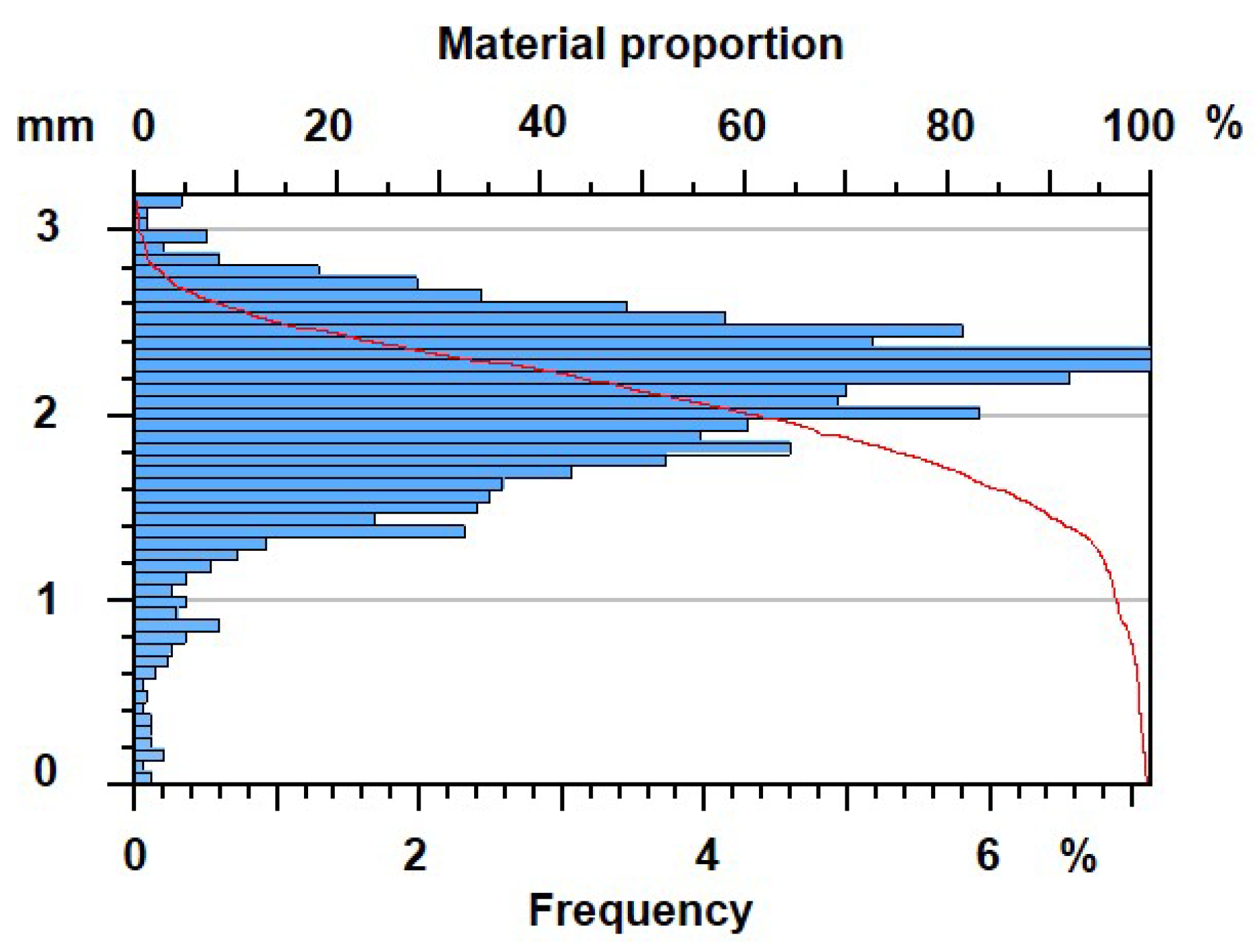
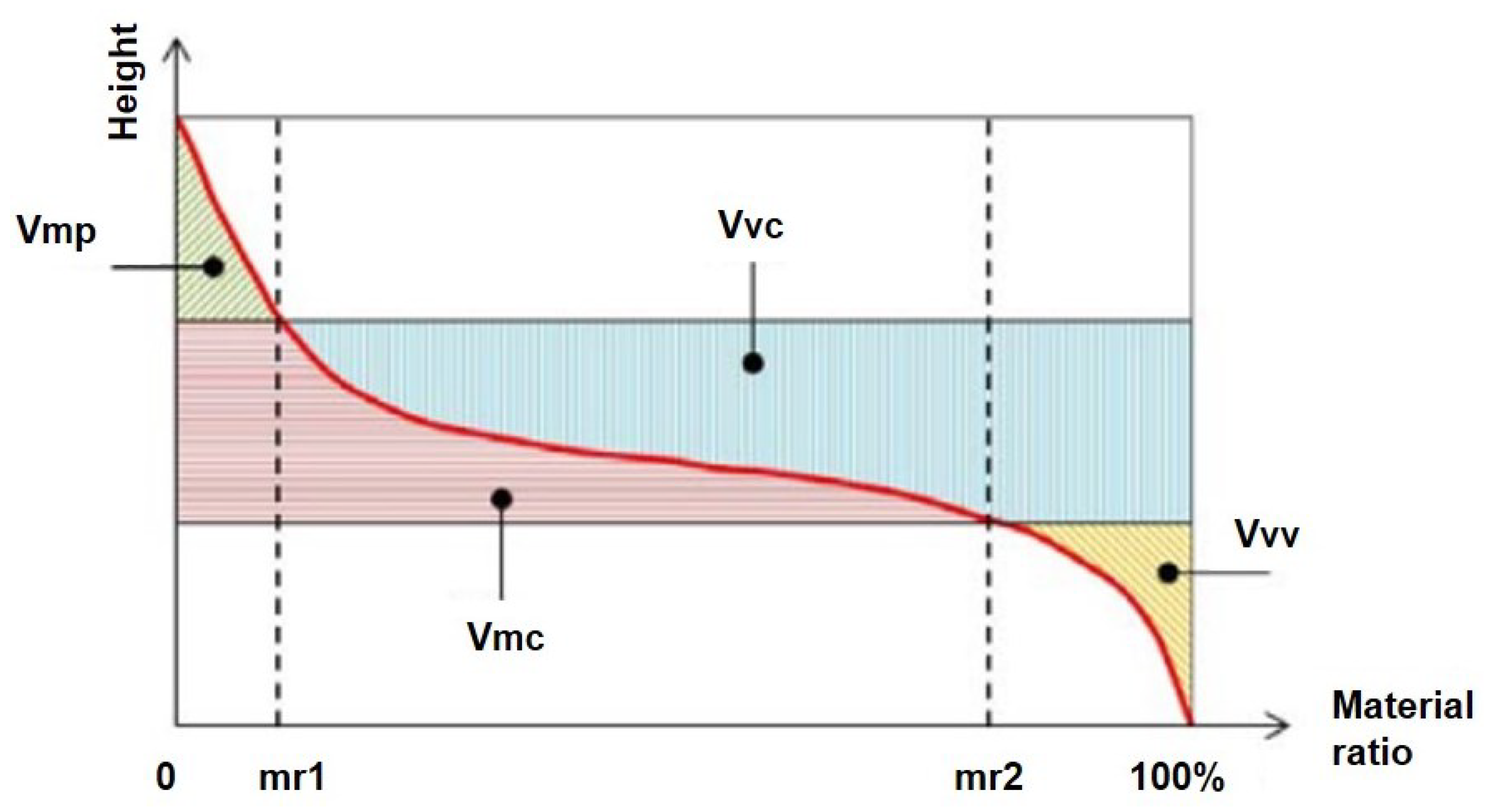
2.4.2. Volume Parameters for Characterizing 3D Road Surface
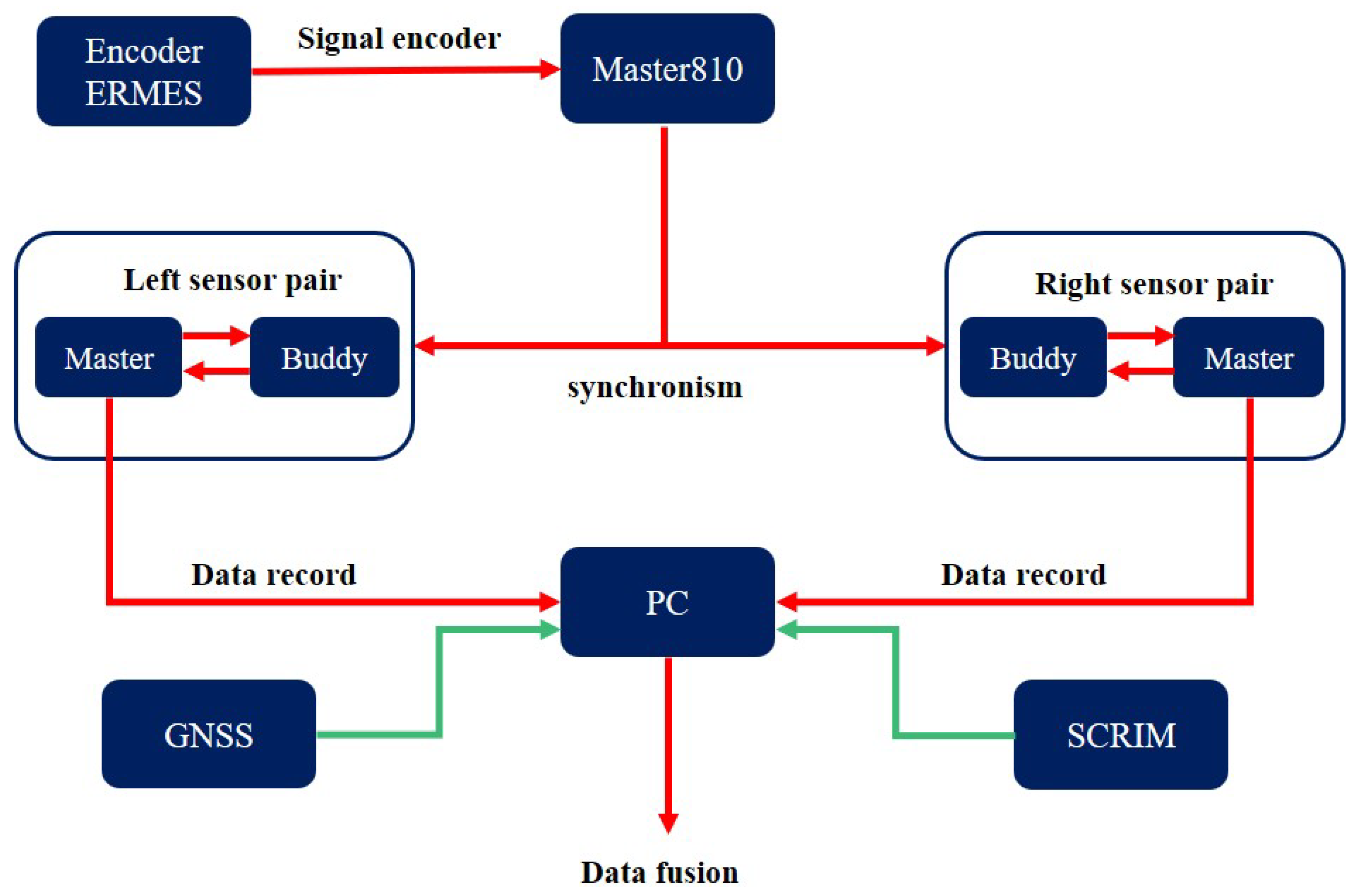
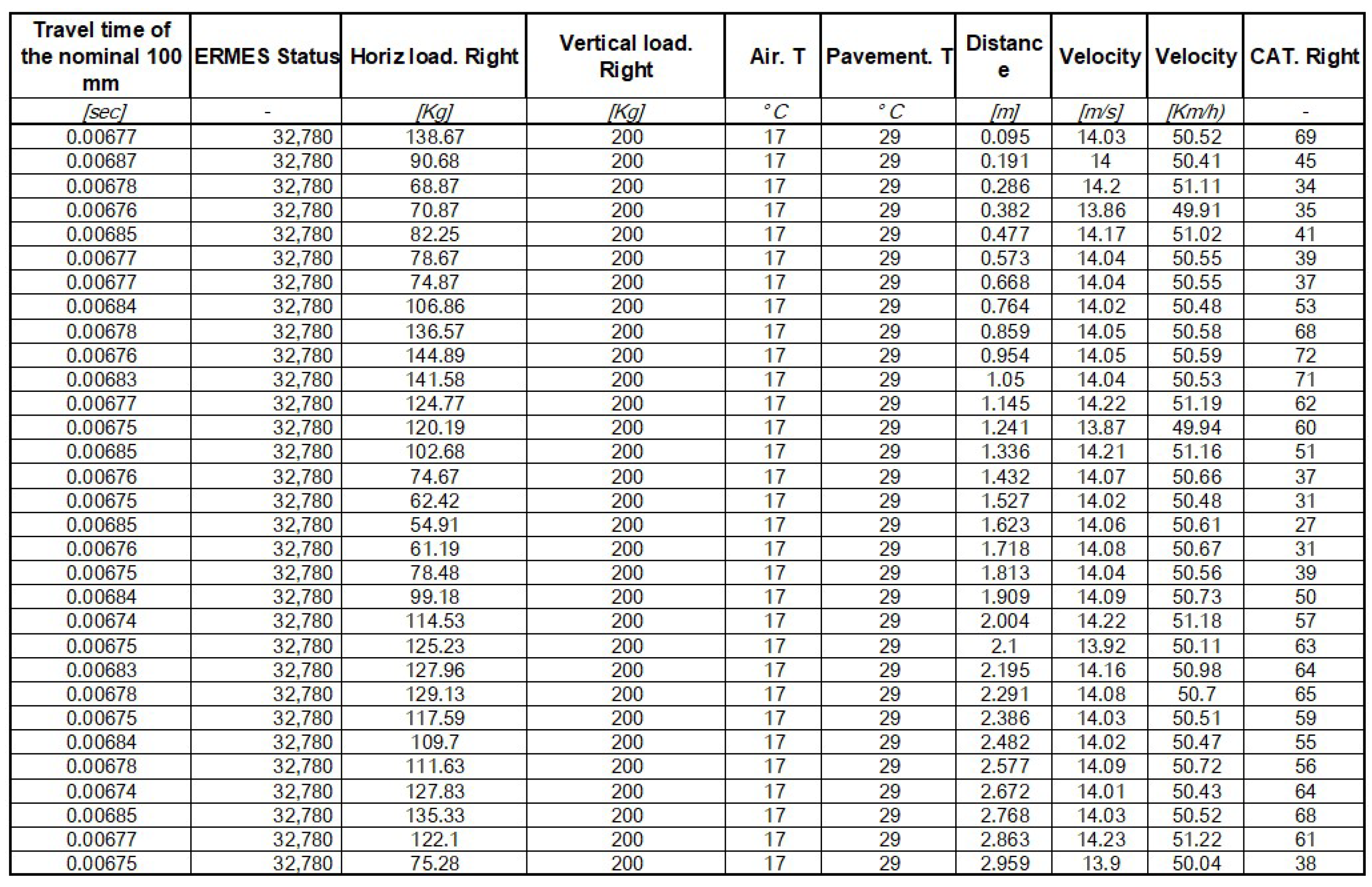
2.5. Data Transmit and Fusion of E.R.M.E.S System
3. Experiments and Results
3.1. Field Experiments
3.2. Results
3.2.1. Trend of CAT
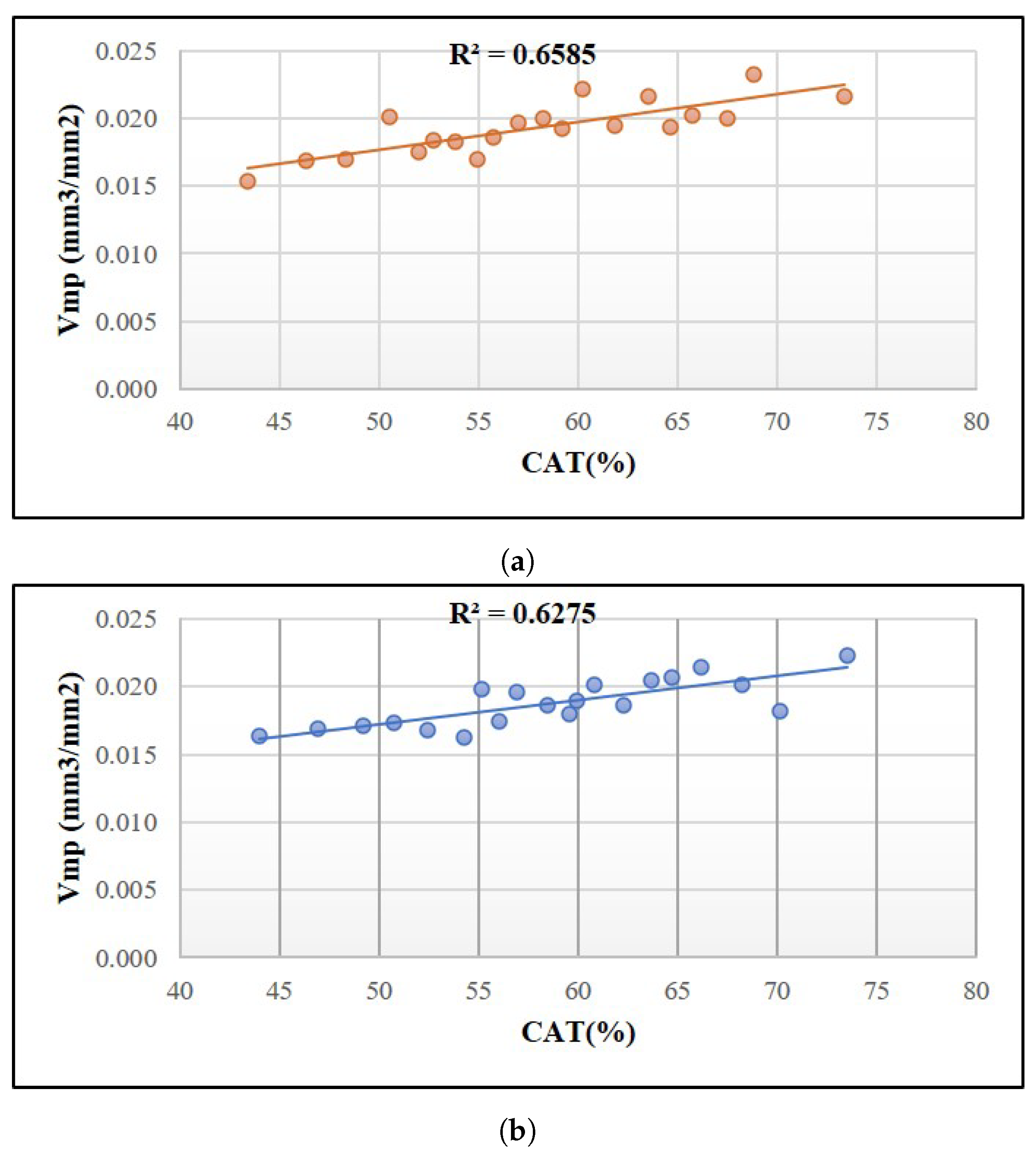
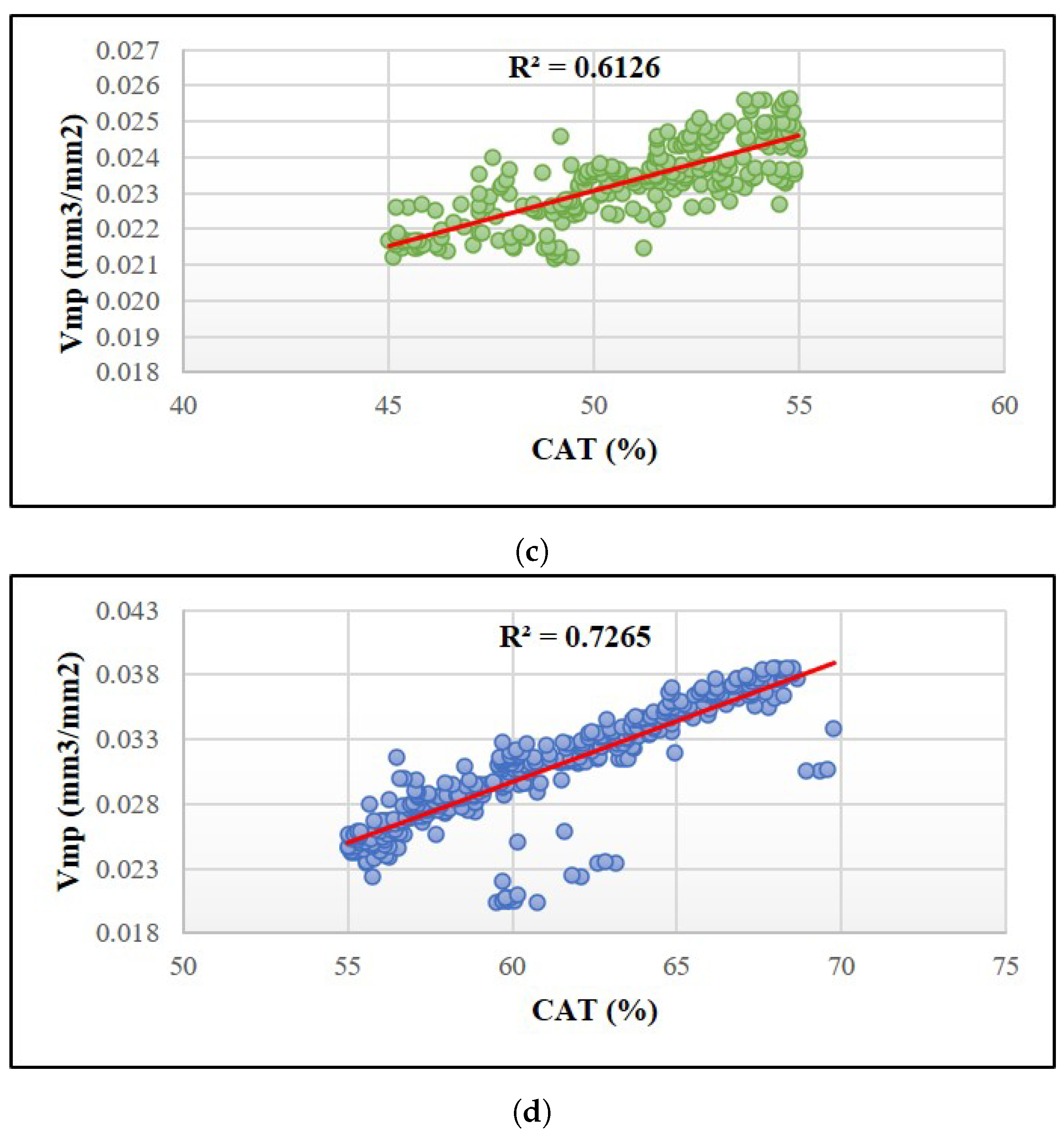
3.2.2. Correlation between CAT and
4. Discussion
4.1. Sample Subdivision
4.2. Pavement Adhesion Assessment
5. Conclusions
- The proposed volume parameter can reliably characterize the asphalt pavement texture. The correlation analysis between the volumetric parameter and the pavement adhesion coefficient CAT demonstrates a satisfactory degree of correlation, indicating the reliability of the proposed volumetric parameter in characterizing the 3D structure of texture;
- By grading asphalt pavement surfaces through CAT thresholds, the accuracy of road surface texture characterization can be effectively improved, and the measurement is more reliable when the CAT value is higher. Within different adhesion thresholds, the correlation between pavement texture and pavement adhesion coefficient is different. Conventional analysis methods may overlook such differences, thus reducing the accuracy of pavement adhesion assessment. Utilizing CAT threshold-based segmentation can reduce this disparity, thereby enhancing accuracy;
- Utilization of 3D laser detection technology enables rapid prediction of asphalt pavement adhesion coefficients and assessment of road skid resistance performance. Based on CAT threshold segmentation, this paper proposes a refined model utilizing road texture volume indicators to estimate asphalt pavement adhesion coefficients. This suggests that in the future, road skid resistance performance can be rapidly and non-invasively assessed through direct employment of road surface 3D laser detection technology.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kogbara, R.B.; Masad, E.A.; Kassem, E.; Scarpas, A.T.; Anupam, K. A State-of-the-Art Review of Parameters Influencing Measurement and Modeling of Skid Resistance of Asphalt Pavements. Constr. Build. Mater. 2016, 114, 602–617. [Google Scholar] [CrossRef]
- Buddhavarapu, P.; Banerjee, A.; Prozzi, J.A. Influence of Pavement Condition on Horizontal Curve Safety. Accid. Anal. Prev. 2013, 52, 9–18. [Google Scholar] [CrossRef] [PubMed]
- Najafi, S.; Flintsch, G.W.; Medina, A. Linking Roadway Crashes and Tire–Pavement Friction: A Case Study. Int. J. Pavement Eng. 2017, 18, 119–127. [Google Scholar] [CrossRef]
- Alhasan, A.; Nlenanya, I.; Smadi, O.; MacKenzie, C.A. Impact of Pavement Surface Condition on Roadway Departure Crash Risk in Iowa. Infrastructures 2018, 3, 14. [Google Scholar] [CrossRef]
- Lyon, C.; Persaud, B.; Merritt, D. Quantifying the Safety Effects of Pavement Friction Improvements—Results from a Large-Scale Study. Int. J. Pavement Eng. 2018, 19, 145–152. [Google Scholar] [CrossRef]
- Abdi Kordani, A.; Rahmani, O.; Abdollahzadeh Nasiri, A.S.; Boroomandrad, S.M. Effect of Adverse Weather Conditions on Vehicle Braking Distance of Highways. Civ. Eng. J. 2018, 4, 46. [Google Scholar] [CrossRef]
- Shibata, K.; Takeuch, K.; Kawai, S.; Horita, Y. Detection of Road Surface Conditions in Winter Using Road Surveillance Cameras at Daytime, Night-Time and Twilight. Int. J. Comput. Sci. Netw. Secur. 2014, 14, 21. [Google Scholar]
- Alhasan, A.; Smadi, O.; Bou-Saab, G.; Hernandez, N.; Cochran, E. Pavement Friction Modeling Using Texture Measurements and Pendulum Skid Tester. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 440–451. [Google Scholar] [CrossRef]
- Chu, L.; Cui, X.; Zhang, K.; Fwa, T.F.; Han, S. Directional Skid Resistance Characteristics of Road Pavement: Implications for Friction Measurements by British Pendulum Tester and Dynamic Friction Tester. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 793–803. [Google Scholar] [CrossRef]
- Choubane, B.; Holzschuher, C.R.; Gokhale, S. Precision of Locked-Wheel Testers for Measurement of Roadway Surface Friction Characteristics. Transp. Res. Rec. J. Transp. Res. Board 2004, 1869, 145–151. [Google Scholar] [CrossRef]
- Zaid, N.B.M.; Hainin, M.R.; Idham, M.K.; Warid, M.N.M.; Naqibah, S.N. Evaluation of Skid Resistance Performance Using British Pendulum and Grip Tester. IOP Conf. Ser. Earth Environ. Sci. 2019, 220, 012016. [Google Scholar] [CrossRef]
- Nejad, F.M.; Karimi, N.; Zakeri, H. Automatic Image Acquisition with Knowledge-Based Approach for Multi-Directional Determination of Skid Resistance of Pavements. Autom. Constr. 2016, 71, 414–429. [Google Scholar] [CrossRef]
- Liang, J.; Gu, X.; Chen, Y.; Ni, F.; Zhang, T. A Novel Pavement Mean Texture Depth Evaluation Strategy Based on Three-Dimensional Pavement Data Filtered by a New Filtering Approach. Measurement 2020, 166, 108265. [Google Scholar] [CrossRef]
- Zuniga-Garcia, N.; Prozzi, J.A. High-Definition Field Texture Measurements for Predicting Pavement Friction. Transp. Res. Rec. 2019, 2673, 246–260. [Google Scholar] [CrossRef]
- Li, Q.J.; Yang, G.; Wang, K.C.P.; Zhan, Y.J.; Wang, C. Novel Macro- and Microtexture Indicators for Pavement Friction by Using High-Resolution Three-Dimensional Surface Data. Transp. Res. Rec. 2017, 2641, 164–176. [Google Scholar] [CrossRef]
- Flintsch, G.W.; McGhee, K.K.; Izeppi, E.d.L.; Najafi, S. The Little Book of Tire Pavement Friction. Pavement Surf. Prop. Consort. 2012, 1, 1–22. [Google Scholar]
- Uz, V.E.; Gökalp, İ. Comparative Laboratory Evaluation of Macro Texture Depth of Surface Coatings with Standard Volumetric Test Methods. Constr. Build. Mater. 2017, 139, 267–276. [Google Scholar] [CrossRef]
- Liu, Z.; Cui, B.; Yang, Q.; Gu, X. Sensor-Based Structural Health Monitoring of Asphalt Pavements with Semi-Rigid Bases Combining Accelerated Pavement Testing and a Falling Weight Deflectometer Test. Sensors 2024, 24, 994. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Yang, Q.; Gu, X. Assessment of Pavement Structural Conditions and Remaining Life Combining Accelerated Pavement Testing and Ground-Penetrating Radar. Remote Sens. 2023, 15, 4620. [Google Scholar] [CrossRef]
- Chen, D.; Ling, C.; Wang, T.; Su, Q.; Ye, A. Prediction of Tire-Pavement Noise of Porous Asphalt Mixture Based on Mixture Surface Texture Level and Distributions. Constr. Build. Mater. 2018, 173, 801–810. [Google Scholar] [CrossRef]
- Shi, J.; Gong, H.; Yang, F.; Liang, H.; Cong, L. Image Processing of Aggregate Skeleton Structure of Asphalt Mixture for Aggregate Uniformity Quantification. J. Mater. Civ. Eng. 2023, 35, 04022388. [Google Scholar] [CrossRef]
- Yang, G.; Li, Q.J.; Zhan, Y.J.; Wang, K.C.P.; Wang, C. Wavelet Based Macrotexture Analysis for Pavement Friction Prediction. KSCE J. Civ. Eng. 2018, 22, 117–124. [Google Scholar] [CrossRef]
- Nguyen, T.S.; Avila, M.; Begot, S. Automatic Detection and Classification of Defect on Road Pavement Using Anisotropy Measure. In Proceedings of the 2009 17th European Signal Processing Conference, Glasgow, UK, 24–28 August 2009. [Google Scholar]
- Liu, S.; Huang, J.H.; Sung, J.; Lee, C. Detection of Cracks Using Neural Networks and Computational Mechanics. Comput. Methods Appl. Mech. Eng. 2002, 191, 2831–2845. [Google Scholar] [CrossRef]
- Fujita, Y.; Shimada, K.; Ichihara, M.; Hamamoto, Y. A Method Based on Machine Learning Using Hand-Crafted Features for Crack Detection from Asphalt Pavement Surface Images. In Proceedings of the Thirteenth International Conference on Quality Control by Artificial Vision 2017, Tokyo, Japan, 14–16 May 2017; p. 103380I. [Google Scholar] [CrossRef]
- Tsai, Y.C.J.; Jiang, C.; Huang, Y. Multiscale Crack Fundamental Element Model for Real-World Pavement Crack Classification. J. Comput. Civ. Eng. 2014, 28, 04014012. [Google Scholar] [CrossRef]
- Du, Y.; Liu, C.; Song, Y.; Li, Y.; Shen, Y. Rapid Estimation of Road Friction for Anti-Skid Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2461–2470. [Google Scholar] [CrossRef]
- Yang, G.; Zhang, A.A.; Wang, K.C.P.; Li, J.Q.; Liu, W.; Liu, Y. Deep-Learning Based Non-Contact Method for Assessing Pavement Skid Resistance Using 3D Laser Imaging Technology. Int. J. Pavement Eng. 2023, 24, 2147520. [Google Scholar] [CrossRef]
- Sun, X.; Huang, J.; Liu, W.; Xu, M. Pavement Crack Characteristic Detection Based on Sparse Representation. EURASIP J. Adv. Signal Process. 2012, 2012, 191. [Google Scholar] [CrossRef]
- Zhang, D.; Zou, Q.; Lin, H.; Xu, X.; He, L.; Gui, R.; Li, Q. Automatic Pavement Defect Detection Using 3D Laser Profiling Technology. Autom. Constr. 2018, 96, 350–365. [Google Scholar] [CrossRef]
- Li, F. A Methodology for Characterizing Pavement Rutting Condition Using Emerging 3D Line Laser Imaging Technology. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2012. [Google Scholar]
- Tsai, Y.; Wu, Y.; Ai, C. Feasibility Study of Measuring Concrete Joint Faulting Using 3D Continuous Pavement Profile Data. In Proceedings of the Transportation Research Board 90th Annual Meeting, Washington, DC, USA, 23–27 January 2011. [Google Scholar]
- Tsai, Y.C.J.; Chatterjee, A. Pothole Detection and Classification Using 3D Technology and Watershed Method. J. Comput. Civ. Eng. 2018, 32, 04017078. [Google Scholar] [CrossRef]
- De Blasiis, M.R.; Di Benedetto, A.; Fiani, M. Mobile Laser Scanning Data for the Evaluation of Pavement Surface Distress. Remote Sens. 2020, 12, 942. [Google Scholar] [CrossRef]
- Chen, W.; Ni, Z.; Hu, X.; Lu, X. Research on Pavement Roughness Based on the Laser Triangulation. Photonic Sens. 2016, 6, 177–180. [Google Scholar] [CrossRef]
- Alamdarlo, M.N.; Hesami, S. Optimization of the Photometric Stereo Method for Measuring Pavement Texture Properties. Measurement 2018, 127, 406–413. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, D.; Gui, R.; Pu, F.; Cao, M.; Xu, X. 3D Pavement Data Decomposition and Texture Level Evaluation Based on Step Extraction and Pavement-Transformer. Measurement 2022, 188, 110399. [Google Scholar] [CrossRef]
- Yang, G.; Li, Q.J.; Zhan, Y.; Yu, W.; Wang, K.C.; Peng, Y. Field Performance Evaluation of High Friction Surface Treatments (HFST) in Oklahoma. Can. J. Civ. Eng. 2019, 46, 1142–1150. [Google Scholar] [CrossRef]
- Torbruegge, S.; Wies, B. Characterization of Pavement Texture by Means of Height Difference Correlation and Relation to Wet Skid Resistance. J. Traffic Transp. Eng. 2015, 2, 59–67. [Google Scholar] [CrossRef]
- Yang, G.; Li, Q.J.; Zhan, Y.; Fei, Y.; Zhang, A. Convolutional Neural Network–Based Friction Model Using Pavement Texture Data. J. Comput. Civ. Eng. 2018, 32, 04018052. [Google Scholar] [CrossRef]
- Chen, D.; Han, S.; Ye, A.; Ren, X.; Wang, W.; Wang, T. Prediction of Tire–Pavement Friction Based on Asphalt Mixture Surface Texture Level and Its Distributions. Road Mater. Pavement Des. 2020, 21, 1545–1564. [Google Scholar] [CrossRef]
- Yang, G.; Wang, K.C.; Li, J.Q. Multiresolution Analysis of Three-Dimensional (3D) Surface Texture for Asphalt Pavement Friction Estimation. Int. J. Pavement Eng. 2021, 22, 1882–1891. [Google Scholar] [CrossRef]
- Yang, G.; Wang, K.C.P.; Li, J.Q.; Wang, G. A Novel 0.1 Mm 3D Laser Imaging Technology for Pavement Safety Measurement. Sensors 2022, 22, 8038. [Google Scholar] [CrossRef]
- Zou, Y.; Yang, G.; Huang, W.; Lu, Y.; Qiu, Y.; Wang, K.C.P. Study of Pavement Micro- and Macro-Texture Evolution Due to Traffic Polishing Using 3D Areal Parameters. Materials 2021, 14, 5769. [Google Scholar] [CrossRef]
- Il Centro Sperimentale Stradale. 2016. Available online: https://www.stradeanas.it/it/il-centro-sperimentale-stradale-di-cesano (accessed on 2 April 2024).
- Crisman, B.; Roberti, R. Tire Wet-Pavement Traction Management for Safer Roads. Procedia Soc. Behav. Sci. 2012, 53, 1054–1067. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for Registration of 3-D Shapes. In Proceedings of the Sensor Fusion IV: Control Paradigms and Data Structures, Boston, MA, USA, 14–15 November 1992; SPIE: Washington, DC, USA, 1992; Volume 1611, pp. 586–606. [Google Scholar] [CrossRef]
- Almhdie, A.; Léger, C.; Deriche, M.; Lédée, R. 3D Registration Using a New Implementation of the ICP Algorithm Based on a Comprehensive Lookup Matrix: Application to Medical Imaging. Pattern Recognit. Lett. 2007, 28, 1523–1533. [Google Scholar] [CrossRef]
- Duffy, A.; Yates, B.; Takacs, P. Using MountainsMap (Digital Surf) Surface Analysis Software as an Analysis Tool for X-ray Mirror Optical Metrology Data. In SPIE Optical Engineering + Applications; Assoufid, L., Takacs, P.Z., Asundi, A.K., Eds.; SPIE: San Diego, CA, USA, 2012; p. 850106. [Google Scholar] [CrossRef]
- Leach, R. (Ed.) Characterisation of Areal Surface Texture; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- International Organization for Standardization. EN ISO 25178-2:2022; Geometrical Product Specifications (GPS)—Surface Texture: Areal—Part 2: Terms, Definitions and Surface Texture Parameters. CEN-CENELEC Management Centre: Brussels, Belgium, January 2022.
- Papageorgiou, G.; Mouratidis, A. Defining Threshold Values for Pavement Surface Characteristics. Proc. Inst. Civ. Eng. Transp. 2015, 168, 223–230. [Google Scholar] [CrossRef]
- Yan, Y.; Ran, M.; Sandberg, U.; Zhou, X.; Xiao, S. Spectral Techniques Applied to Evaluate Pavement Friction and Surface Texture. Coatings 2020, 10, 424. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Parameter | Values |
|---|---|
| Scan Rate | 15 ≤ 5000 Hz |
| Points per Profile | 1280 |
| Transverse Resolution (X) | 0.095 mm–0.170 mm |
| Depth Resolution | 0.015 mm–0.040 mm |
| Field of View (FOV) | 64 mm–240 mm |
| Clearance Distance (CD) | 190 mm |
| Measurement Range (MR) | 210 mm |
| Adhesion Level | Judgment | Operations | Number of Samples |
|---|---|---|---|
| CAT < 0.35 | Mediocre | Very frequent checks | 491 |
| 0.35 < CAT < 0.45 | Moderate | Frequent checks | 386 |
| 0.45 < CAT < 0.55 | Satisfactory | Periodic surveillance | 276 |
| CAT > 0.55 | Good | Reduce surveillance | 432 |
| Adhesion Level | Prediction Models | Coeff. Person | |
|---|---|---|---|
| CAT < 0.35 | y = 0.0002x + 0.0074 | 0.6109 | 0.7816 |
| 0.35 < CAT < 0.45 | y = 0.0007x − 0.0087 | 0.6006 | 0.7803 |
| 0.45 < CAT < 0.55 | y = 0.0003x + 0.0076 | 0.6126 | 0.7827 |
| CAT > 0.55 | y = 0.0009x − 0.0268 | 0.7265 | 0.8523 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Pagano, R.G.; Oddone, S.; Cong, L.; De Blasiis, M.R. Analysis of Road Surface Texture for Asphalt Pavement Adhesion Assessment Using 3D Laser Technology. Remote Sens. 2024, 16, 1943. https://doi.org/10.3390/rs16111943
Liang H, Pagano RG, Oddone S, Cong L, De Blasiis MR. Analysis of Road Surface Texture for Asphalt Pavement Adhesion Assessment Using 3D Laser Technology. Remote Sensing. 2024; 16(11):1943. https://doi.org/10.3390/rs16111943
Chicago/Turabian StyleLiang, Haimei, Rosa Giovanna Pagano, Stefano Oddone, Lin Cong, and Maria Rosaria De Blasiis. 2024. "Analysis of Road Surface Texture for Asphalt Pavement Adhesion Assessment Using 3D Laser Technology" Remote Sensing 16, no. 11: 1943. https://doi.org/10.3390/rs16111943
APA StyleLiang, H., Pagano, R. G., Oddone, S., Cong, L., & De Blasiis, M. R. (2024). Analysis of Road Surface Texture for Asphalt Pavement Adhesion Assessment Using 3D Laser Technology. Remote Sensing, 16(11), 1943. https://doi.org/10.3390/rs16111943