

Decomposition of Submesoscale Ocean Wave and Current Derived from UAV-Based Observation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
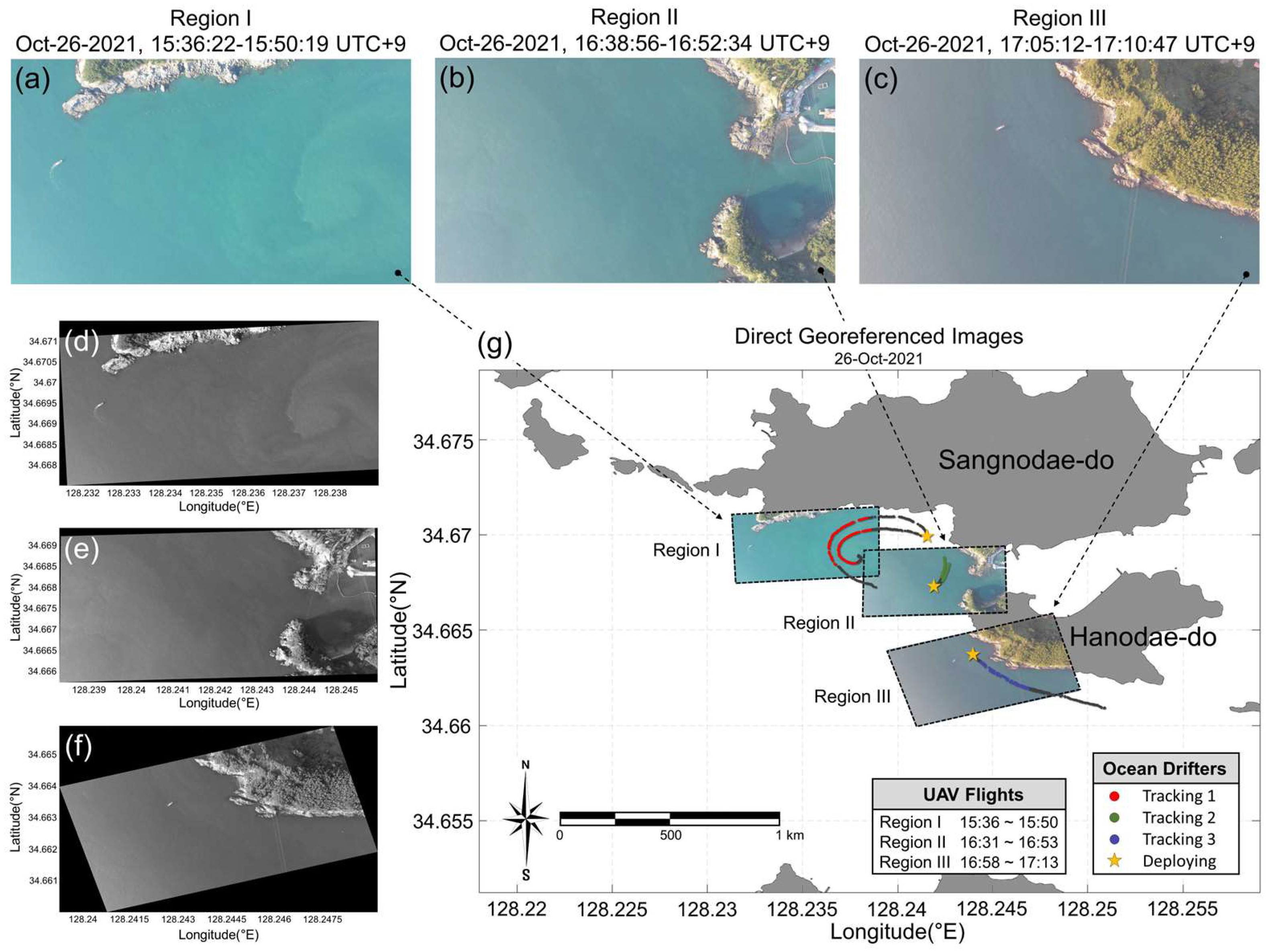
2.1. Study Area
2.2. In Situ Data
2.3. UAV Image Processing
3. Results
3.1. Sea Surface Signal Decomposition
3.2. Surface Wave Signal Analysis
3.3. Optically Derived Surface Current
3.4. Ocean Drifter Validation
4. Discussion
4.1. Direct Georeferencing
4.2. Effect of Land Signals on Image Decomposition
4.3. Parameters Setting for FA-MEMD
4.4. Computataional Resources
4.5. Surface Current Estimation
5. Conclusions
- The UAV imagery was decomposed into several BIMFs using FA-MEMD, demonstrating its proficiency in processing nonlinear spatiotemporal data. The surface wave and current signal were distinguished based on the frequency (0.1 Hz) for each mode obtained using HSA.
- Wave characteristics, including the wavelength and wave direction, were spatially analyzed using a 2D FFT. From BIMF1 to BIMF3, wind-driven surface waves propagating northeastward with high-frequency (wavenumbers, Kx, Ky of 0.02–0.1 m−1) signals can be seen in the order of short to long wavelengths. Each wave of various scales that were mixed was confirmed.
- The surface current was estimated using an open-source OF algorithm, which is widely adopted to calculate motion vectors from consecutive sea surface images. The optically derived current field from the sum of BIMF4 to the residual showed flow patterns consistent with the in situ drifter deployment. The current velocities throughout the three observation scenes exhibited reasonable validation results with R2 and RMSE values of 0.804 and 0.033 ms−1, respectively.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- McWilliams, J.C. Submesoscale currents in the ocean. Proc. R. Soc. A Math. Phys. Eng. Sci. 2016, 472, 2189. [Google Scholar] [CrossRef]
- Taylor, J.R.; Thompson, A.F. Submesoscale Dynamics in the Upper Ocean. Annu. Rev. Fluid Mech. 2023, 55, 103–127. [Google Scholar] [CrossRef]
- Chelton, D.B.; Schlax, M.G.; Samelson, R.M. Global observations of nonlinear mesoscale eddies. Prog. Oceanogr. 2011, 91, 167–216. [Google Scholar] [CrossRef]
- Morrow, R.; Le Traon, P.Y. Recent advances in observing mesoscale ocean dynamics with satellite altimetry. Adv. Space Res. 2012, 50, 1062–1076. [Google Scholar] [CrossRef]
- Capet, X.; Campos, E.J.; Paiva, A.M. Submesoscale activity over the Argentinian shelf. Geophys. Res. Lett. 2008, 35, L15605. [Google Scholar] [CrossRef]
- Garabato, A.C.N.; Yu, X.; Callies, J.; Barkan, R.; Polzin, K.L.; Frajka-Williams, E.E.; Griffies, S.M. Kinetic Energy Transfers between Mesoscale and Submesoscale Motions in the Open Ocean’s Upper Layers. J. Phys. Oceanogr. 2022, 52, 75–97. [Google Scholar] [CrossRef]
- Ferrari, R.; Wunsch, C. Ocean Circulation Kinetic Energy: Reservoirs, Sources, and Sinks. Annu. Rev. Fluid Mech. 2009, 41, 253–282. [Google Scholar] [CrossRef]
- Wang, Q.; Pang, C.; Dong, C. Role of submesoscale processes in the isopycnal mixing associated with subthermocline eddies in the Philippine Sea. Deep-Sea Res. II Top. Stud. Oceanogr. 2022, 202, 105148. [Google Scholar] [CrossRef]
- Haine, T.W.N.; Marshall, J. Gravitational, Symmetric, and Baroclinic Instability of the Ocean Mixed Layer. J. Phys. Oceanogr. 1998, 28, 634–658. [Google Scholar] [CrossRef]
- Boccaletti, G.; Ferrari, R.; Fox-Kemper, B. Mixed Layer Instabilities and Restratification. J. Phys. Oceanogr. 2007, 37, 2228–2250. [Google Scholar] [CrossRef]
- Lévy, M.; Ferrari, R.; Franks, P.J.S.; Martin, A.P.; Rivière, P. Bringing physics to life at the submesoscale. Geophys. Res. Lett. 2012, 3, 1–13. [Google Scholar] [CrossRef]
- Mahadevan, A. The Impact of Submesoscale Physics on Primary Productivity of Plankton. Annu. Rev. Mar. Sci. 2016, 8, 161–184. [Google Scholar] [CrossRef]
- Thomas, L.N.; Tandon, A.; Mahadevan, A. Submesoscale processes and dynamics. Ocean. Model. Eddying Regime Geophys. Monogr. Ser. 2008, 177, 17–38. [Google Scholar]
- Yurovsky, Y.Y.; Kubryakov, A.A.; Plotnikov, E.V.; Lishaev, P.N. Submesoscale Currents from UAV: An Experiment over Small-Scale Eddies in the Coastal Black Sea. Remote Sens. 2022, 14, 3364. [Google Scholar] [CrossRef]
- Anderson, D.; Bak, A.S.; Brodie, K.L.; Cohn, N.; Holman, R.A.; Stanley, J. Quantifying Optically Derived Two-Dimensional Wave-Averaged Currents in the Surf Zone. Remote Sens. 2021, 13, 690. [Google Scholar] [CrossRef]
- Dérian, P.; Almar, R. Wavelet-Based Optical Flow Estimation of Instant Surface Currents from Shore-Based and UAV Videos. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5790–5797. [Google Scholar] [CrossRef]
- Rodríguez-Padilla, I.; Castelle, B.; Marieu, V.; Bonneton, P.; Mouragues, A.; Martins, K.; Morichon, D. Wave-Filtered Surf Zone Circulation under High-Energy Waves Derived from Video-Based Optical Systems. Remote Sens. 2021, 13, 1874. [Google Scholar] [CrossRef]
- Castro, S.L.; Emery, W.J.; Wick, G.A.; Tandy, W. Submesoscale Sea Surface Temperature Variability from UAV and Satellite Measurements. Remote Sens. 2017, 9, 1089. [Google Scholar] [CrossRef]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Validation of Doppler Scatterometer Concepts using Measurements from the Black Sea Research Platform. In Proceedings of the “2018 Doppler Oceanography from Space (DOfS)” Workshop, Brest, France, 10–12 October 2018; IEEE: Washington, DC, USA, 2018. [Google Scholar]
- Kubryakov, A.A.; Lishaev, P.N.; Chepyzhenko, A.I.; Aleskerova, A.A.; Kubryakova, E.A.; Medvedeva, A.V.; Stanichny, S.V. Impact of Submesoscale Eddies on the Transport of Suspended Matter in the Coastal Zone of Crimea Based on Drone, Satellite, and In Situ Measurement Data. Oceanology 2021, 61, 159–172. [Google Scholar] [CrossRef]
- Thirumalaisamy, M.R.; Ansell, P.J. Fast and Adaptive Empirical Mode Decomposition for Multidimensional, Multivariate Signals. IEEE Signal Process. Lett. 2018, 25, 1550–1554. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Nunes, J.C.; Bouaoune, Y.; Delechelle, E.; Niang, O.; Bunel, P. Image analysis by bidimensional empirical mode decomposition. Image Vis. Comput. 2003, 21, 1019–1026. [Google Scholar] [CrossRef]
- Bhuiyan, S.M.; Adhami, R.R.; Khan, J.F. Fast and Adaptive Bidimensional Empirical Mode Decomposition Using Order-Statistics Filter Based Envelope Estimation. EURASIP J. Adv. Signal Process. 2008, 2008, 18. [Google Scholar] [CrossRef]
- Chen, C.Y.; Guo, S.M.; Chang, W.S.; Tsai, S.H.; Cheng, K.S. An improved bidimensional empirical mode decomposition: A mean approach for fast decomposition. Signal Process. 2014, 98, 344–358. [Google Scholar] [CrossRef]
- Riffi, J.; Mahraz, A.M.; Abbad, A.; Tairi, H. 3D extension of the fast and adaptive bidimensional empirical mode decomposition. Multidimens. Syst. Signal Process. 2015, 26, 823–834. [Google Scholar] [CrossRef]
- He, Z.; Li, J.; Liu, L.; Shen, Y. Three-dimensional empirical mode decomposition (TEMD): A fast approach motivated by separable filters. Signal Process. 2017, 131, 307–319. [Google Scholar] [CrossRef]
- Jung, D.; Lee, J.S.; Baek, J.Y.; Nam, J.; Jo, Y.H.; Song, K.M.; Cheong, Y.I. High Temporal and Spatial Resolutions of Sea Surface Current from Low-Altitude Remote Sensing. J. Coast. Res. 2019, 90, 282–288. [Google Scholar] [CrossRef]
- Mian, O.; Lutes, J.; Lipa, G.; Hutton, J.J.; Gavelle, E.; Borghini, S. Direct georeferencing on small unmanned aerial platforms for improved reliability and accuracy of mapping without the need for ground control points. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 397. [Google Scholar] [CrossRef]
- Lee, J.S.; Baek, J.Y.; Shin, J.; Kim, J.S.; Jo, Y.H. Suspended Sediment Concentration Estimation along Turbid Water Outflow Using a Multispectral Camera on an Unmanned Aerial Vehicle. Remote Sens. 2023, 15, 5540. [Google Scholar] [CrossRef]
- Streßer, M.; Carrasco, R.; Horstmann, J. Video-Based Estimation of Surface Currents Using a Low-Cost Quadcopter. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2027–2031. [Google Scholar] [CrossRef]
- Horstmann, J.; Streßer, M.; Carrasco, R. Surface currents retrieved from airborne video. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–4. [Google Scholar]
- Rosten, E.; Drummond, T. Machine Learning for High-Speed Corner Detection. In Proceedings of the Computer Vision—ECCV 2006, Graz, Austria, 7–13 May 2006; pp. 430–443. [Google Scholar]
- Rai, V.K.; Mohanty, A.R. Bearing fault diagnosis using FFT of intrinsic mode functions in Hilbert–Huang transform. Mech. Syst. Signal Process. 2007, 21, 2607–2615. [Google Scholar] [CrossRef]
- Mercorelli, P. A denoising procedure using wavelet packets for instantaneous detection of pantograph oscillations. Mech. Syst. Signal Process. 2013, 35, 137–149. [Google Scholar] [CrossRef]
- Dahl, M. Turbulent Statistics from Time-Resolved PIV Measurements of a Jet Using Empirical Mode Decomposition. In Proceedings of the 18th AIAA/CEAS Aeroacoustics, Colorado Springs, CO, USA, 4–6 June 2012. [Google Scholar]
- Ansell, P.J.; Balajewicz, M.J. Separation of Unsteady Scales in a Mixing Layer Using Empirical Mode Decomposition. AIAA J. 2017, 55, 419–434. [Google Scholar] [CrossRef]
- Ansell, P.J.; Mulleners, K. Multiscale Vortex Characteristics of Dynamic Stall from Empirical Mode Decomposition. AIAA J. 2020, 58, 600–617. [Google Scholar] [CrossRef]
- Koll, M.; Favale, J.; Kirchner, B.M.; Elliott, G.S.; Dutton, J.C. Flow Structure Identification in the Near Wake of an Axisymmetric Supersonic Base Flow Using MEEMD. In Proceedings of the 47th AIAA Fluid Dynamics, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Koll, M.; Scott, A.; Elliott, G.S.; Dutton, J.C. Flow Structure Identification in the Near Wake of a Supersonic Separated Flow Using FAEMD. In Proceedings of the 2018 Fluid Dynamics, Atlanta, GA, USA, 25–29 June 2018; p. 3540. [Google Scholar]
- Ur Rehman, N.; Mandic, D.P. Filter Bank Property of Multivariate Empirical Mode Decomposition. IEEE Trans. Signal Process. 2011, 59, 2421–2426. [Google Scholar] [CrossRef]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef]
- Liu, T.; Wang, B.; Choi, D.S. Flow structures of Jupiter’s Great Red Spot extracted by using optical flow method. Phys. Fluids 2012, 24, 096601. [Google Scholar] [CrossRef]
- Tu, Z.; Van Der Aa, N.; Van Gemeren, C.; Veltkamp, R.C. A combined post-filtering method to improve accuracy of variational optical flow estimation. Pattern Recognit. 2014, 47, 1926–1940. [Google Scholar] [CrossRef]
- Liu, T.; Salazar, D.M. OpenOpticalFlow_PIV: An Open Source Program Integrating Optical Flow Method with Cross-Correlation Method for Particle Image Velocimetry. J. Open Res. Softw. 2021, 9, 3. [Google Scholar] [CrossRef]
- Quénot, G.M.; Pakleza, J.; Kowalewski, T.A. Particle image velocimetry with optical flow. Exp. Fluids 1998, 25, 177–189. [Google Scholar] [CrossRef]
- Corpetti, T.; Mémin, E.; Pérez, P. Dense estimation of fluid flows. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 365–380. [Google Scholar] [CrossRef]
- Corpetti, T.; Heitz, D.; Arroyo, G.; Mémin, E.; Santa-Cruz, A. Fluid experimental flow estimation based on an optical-flow scheme. Exp. Fluids 2006, 40, 80–97. [Google Scholar] [CrossRef]
- Ruhnau, P.; Kohlberger, T.; Schnörr, C.; Nobach, H. Variational optical flow estimation for particle image velocimetry. Exp. Fluids 2004, 38, 21–32. [Google Scholar] [CrossRef]
- Liu, T.; Shen, L. Fluid flow and optical flow. J. Fluid Mech. 2008, 614, 253–291. [Google Scholar] [CrossRef]
- Heitz, D.; Héas, P.; Mémin, E.; Carlier, J. Dynamic consistent correlation-variational approach for robust optical flow estimation. Exp. Fluids 2008, 45, 595–608. [Google Scholar] [CrossRef]
- Heitz, D.; Mémin, E.; Schnörr, C. Variational fluid flow measurements from image sequences: Synopsis and perspectives. Exp. Fluids 2009, 48, 369–393. [Google Scholar] [CrossRef]
- Liu, T. OpenOpticalFlow: An Open Source Program for Extraction of Velocity Fields from Flow Visualization Images. J. Open Res. Softw. 2017, 5, 29. [Google Scholar] [CrossRef]
- Cao, Y.; Wu, Y.; Yao, Q.; Yu, J.; Hou, D.; Wu, Z.; Wang, Z. River Surface Velocity Estimation Using Optical Flow Velocimetry Improved with Attention Mechanism and Position Encoding. IEEE Sens. J. 2022, 22, 16533–16544. [Google Scholar] [CrossRef]
- Zuiderveld, K. Contrast Limited Adaptive Histogram Equalization. In Graphic Gems IV; Academic Press: Cambridge, MA, USA, 1994; pp. 474–485. [Google Scholar]
- Vidhya, G.R.; Ramesh, H. Effectiveness of Contrast Limited Adaptive Histogram Equalization Technique on Multispectral Satellite Imagery. In Proceedings of the international Conference on Video and Image Processing, Beijing, China, 17–20 September 2017; pp. 234–239. [Google Scholar]
- Liu, T.; Merat, A.; Makhmalbaf, M.H.M.; Fajardo, C.; Merati, P. Comparison between optical flow and cross-correlation methods for extraction of velocity fields from particle images. Exp. Fluids 2015, 56, 166. [Google Scholar] [CrossRef]
- Yang, W.; Tavner, P.J. Empirical mode decomposition, an adaptive approach for interpreting shaft vibratory signals of large rotating machinery. J. Sound Vib. 2009, 321, 1144–1170. [Google Scholar] [CrossRef]
- Munk, W.H. Origin and generation of waves. In Proceedings of the 1st International Conference on Coastal Engineering, Long Beach, CA, USA, 1 January 1950; ASCE: Reston, VI, USA, 1950; pp. 1–4. [Google Scholar]
- Guimarães, P.V.; Ardhuin, F.; Bergamasco, F.; Leckler, F.; Filipot, J.F.; Shim, J.S.; Dulov, V.; Benetazzo, A. A data set of sea surface stereo images to resolve space-time wave fields. Sci. Data 2020, 7, 145. [Google Scholar] [CrossRef] [PubMed]
- Benetazzo, A.; Serafino, F.; Bergamasco, F.; Ludeno, G.; Ardhuin, F.; Sutherland, P.; Sclavo, M.; Barbariol, F. Stereo imaging and X-band radar wave data fusion: An assessment. Ocean Eng. 2018, 152, 346–352. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-Y.; Lee, J.-S.; Jeong, Y.; Jo, Y.-H. Decomposition of Submesoscale Ocean Wave and Current Derived from UAV-Based Observation. Remote Sens. 2024, 16, 2275. https://doi.org/10.3390/rs16132275
Kim S-Y, Lee J-S, Jeong Y, Jo Y-H. Decomposition of Submesoscale Ocean Wave and Current Derived from UAV-Based Observation. Remote Sensing. 2024; 16(13):2275. https://doi.org/10.3390/rs16132275
Chicago/Turabian StyleKim, Sin-Young, Jong-Seok Lee, Youchul Jeong, and Young-Heon Jo. 2024. "Decomposition of Submesoscale Ocean Wave and Current Derived from UAV-Based Observation" Remote Sensing 16, no. 13: 2275. https://doi.org/10.3390/rs16132275