
An Inverse Modeling Approach for Retrieving High-Resolution Surface Fluxes of Greenhouse Gases from Measurements of Their Concentrations in the Atmospheric Boundary Layer

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Forward Modeling
2.1.1. Airflow Modeling
2.1.2. GHG Distribution Modeling
2.2. Inverse Modeling Algorithm
2.2.1. Inverse Problem
2.2.2. Initial Flux Approximation
2.3. Model Initialization
2.3.1. Experimental Site
2.3.2. Model Input
2.3.3. Model Setup and Initialization
3. Results and Discussion
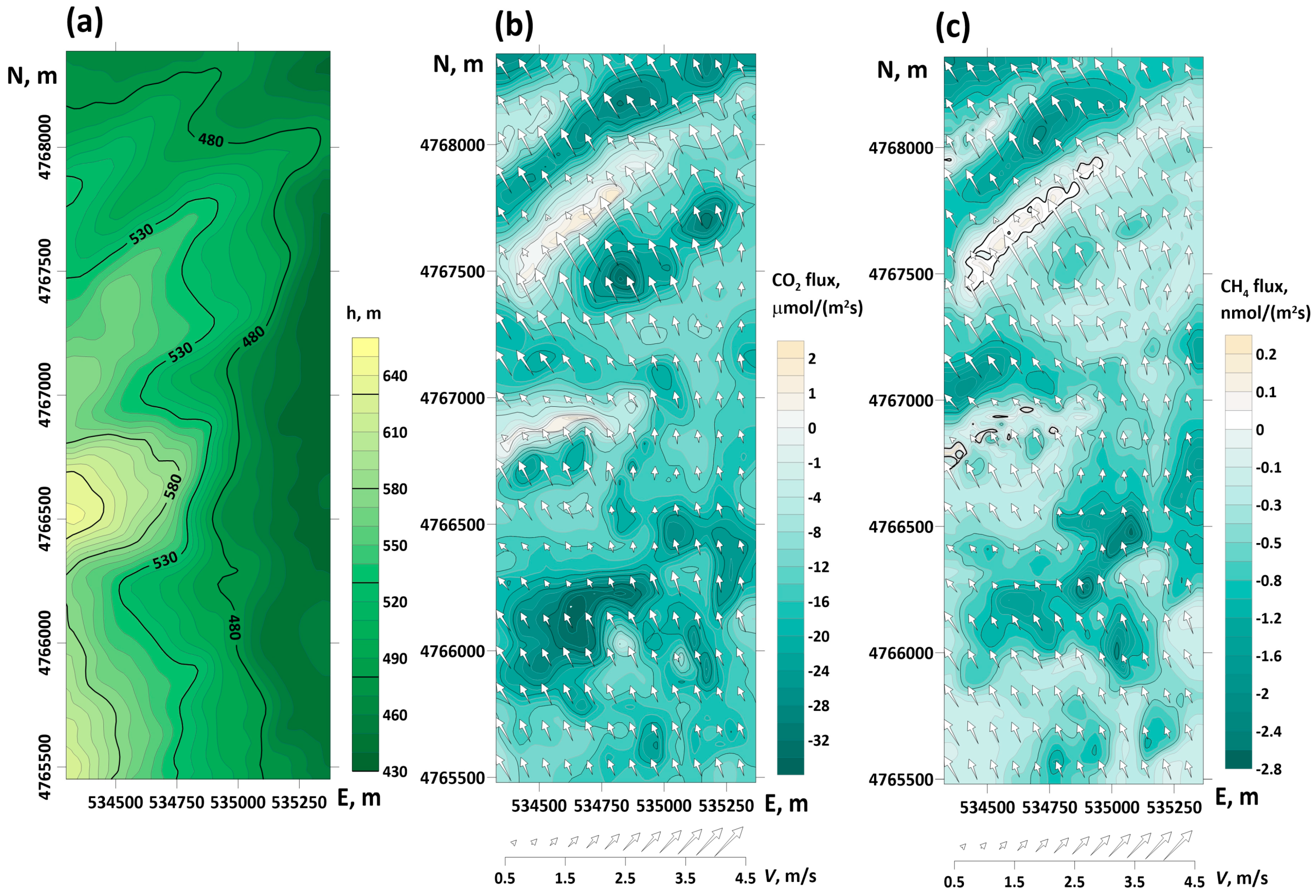
3.1. Target GHG Fluxes
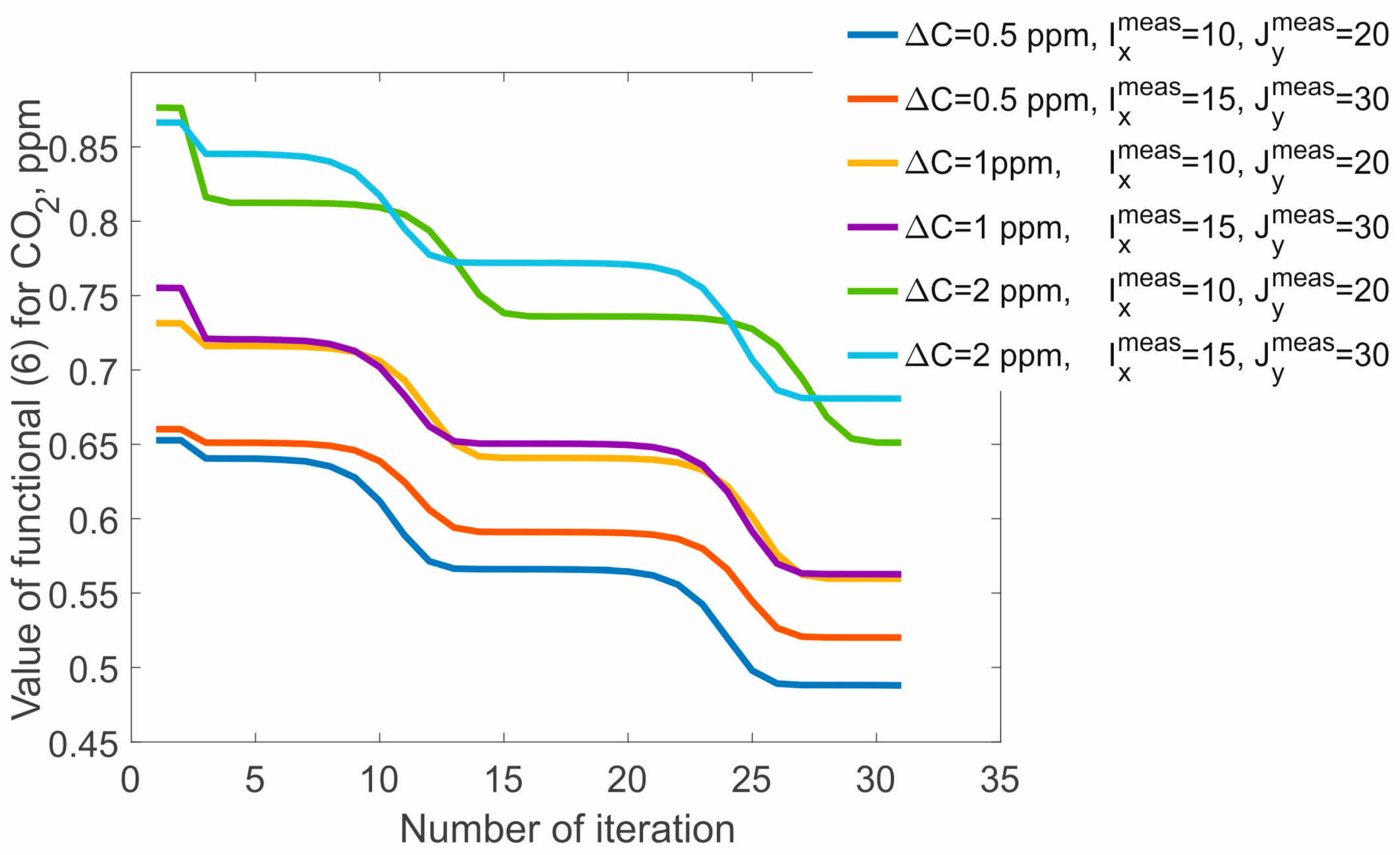
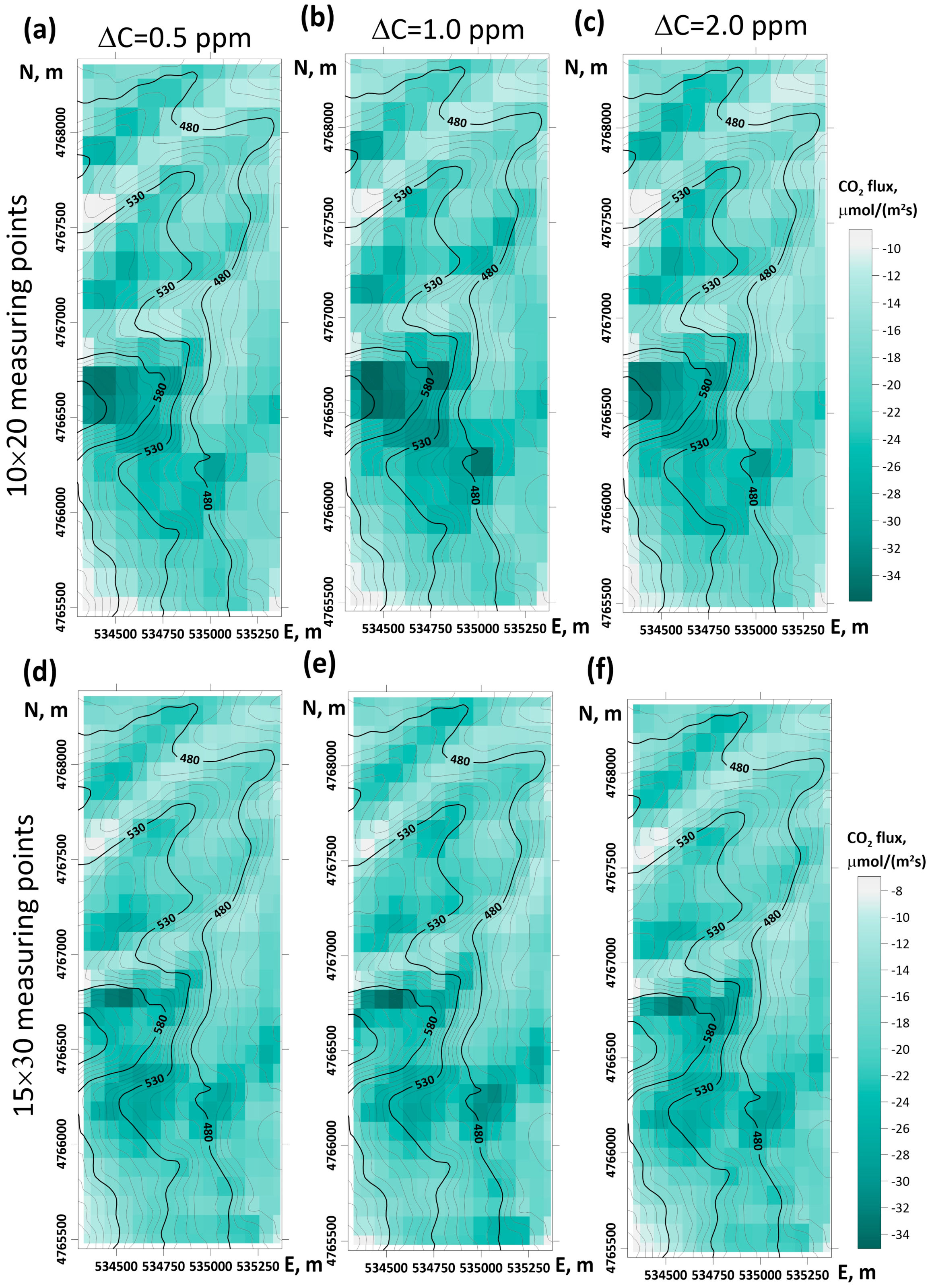
3.2. Retrieved CO2 Fluxes
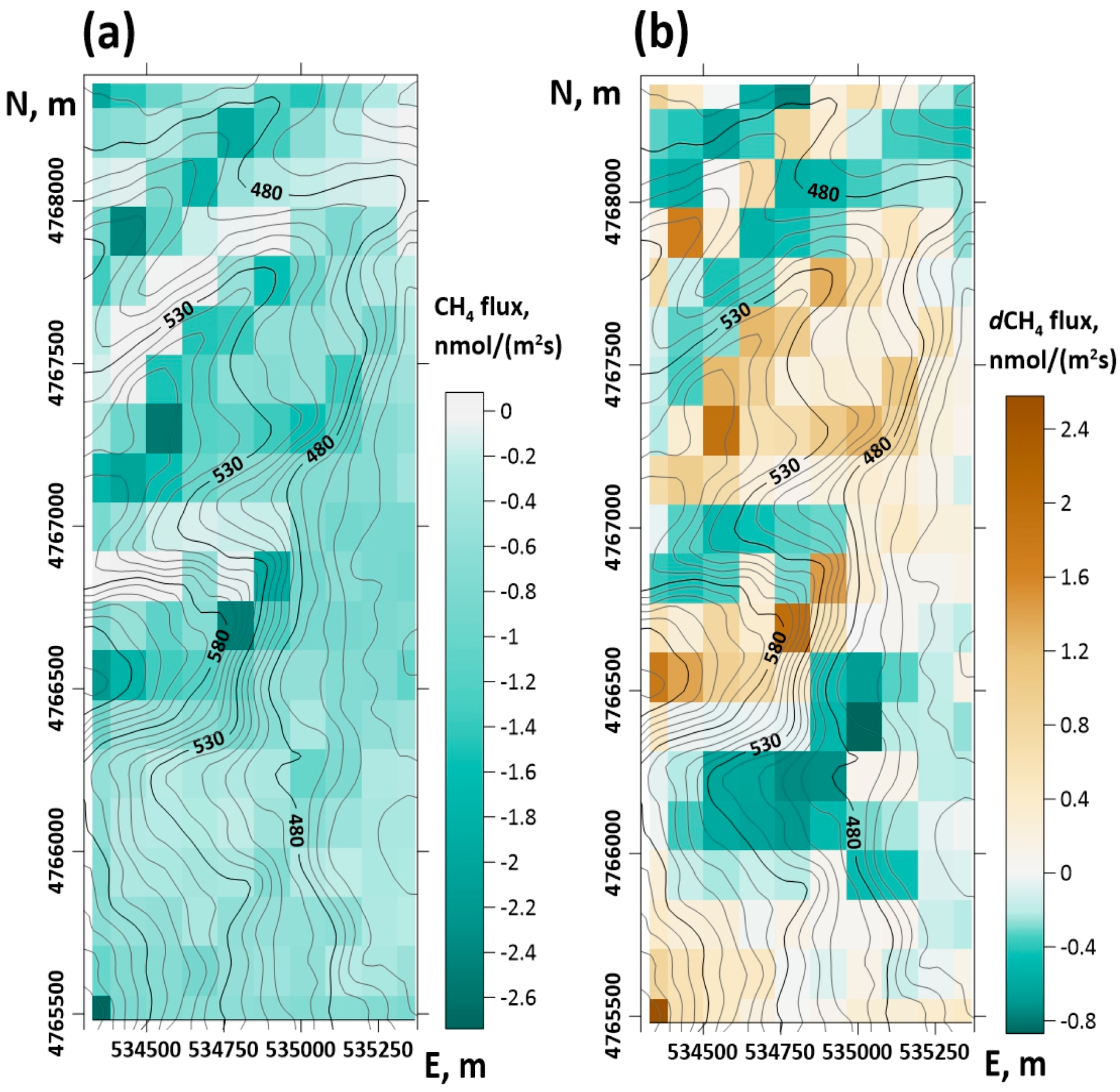
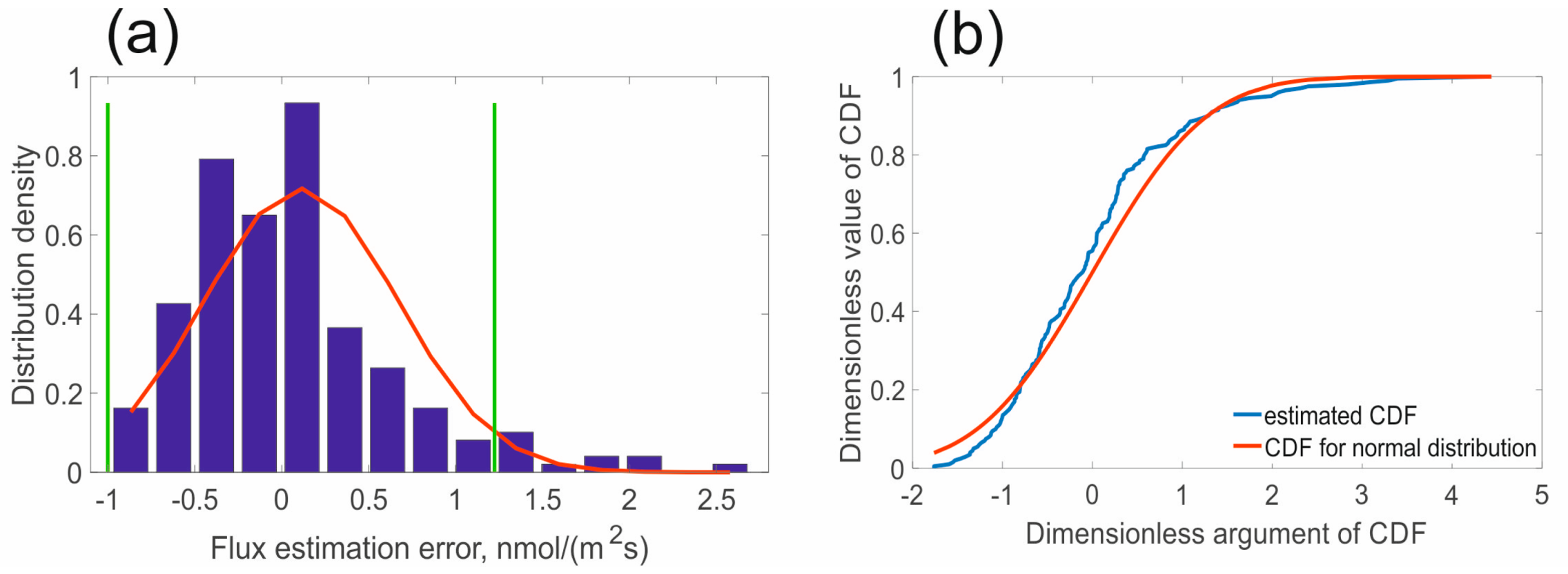
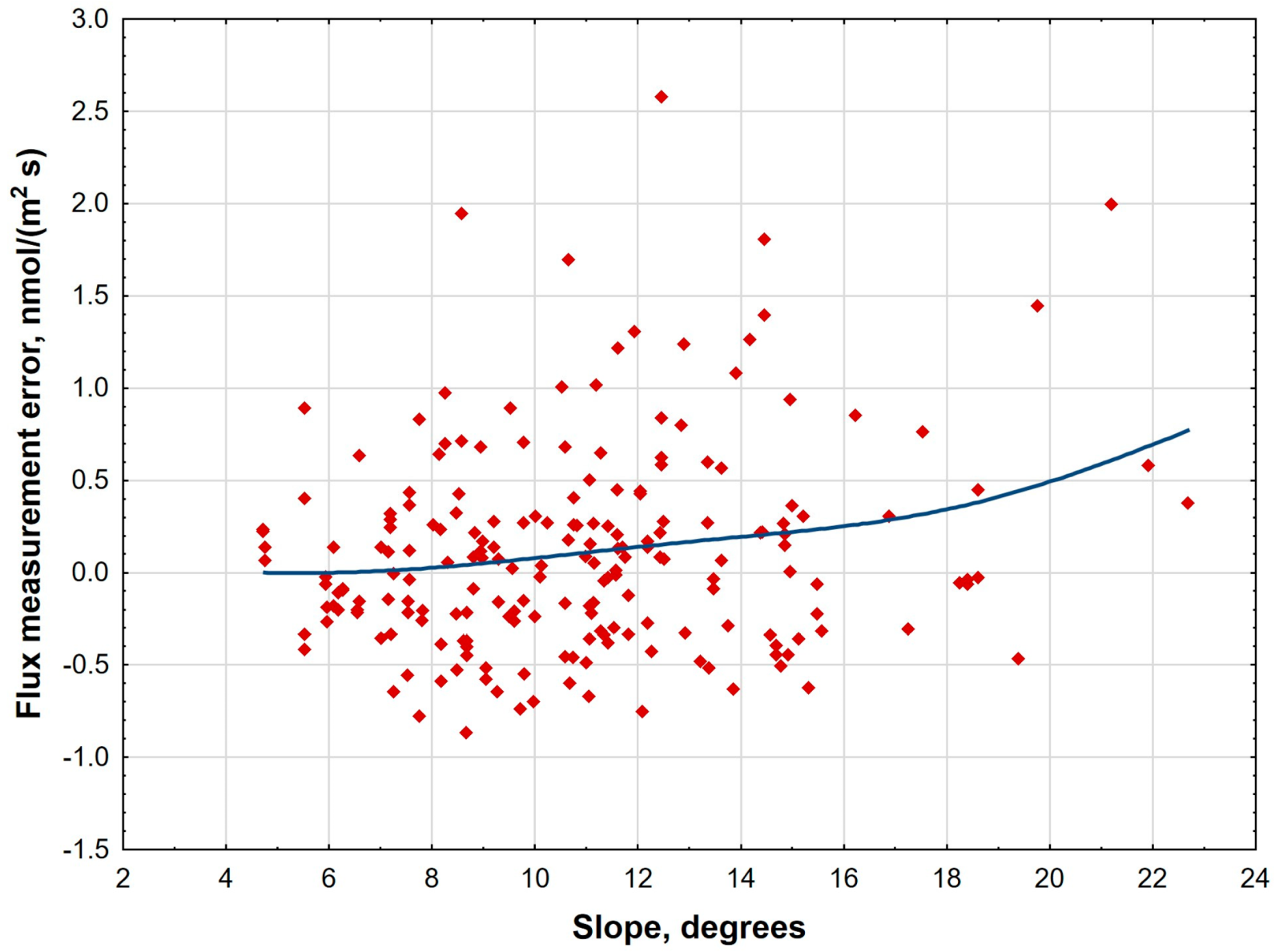
3.3. Retrieved CH4 Fluxes
4. Conclusions
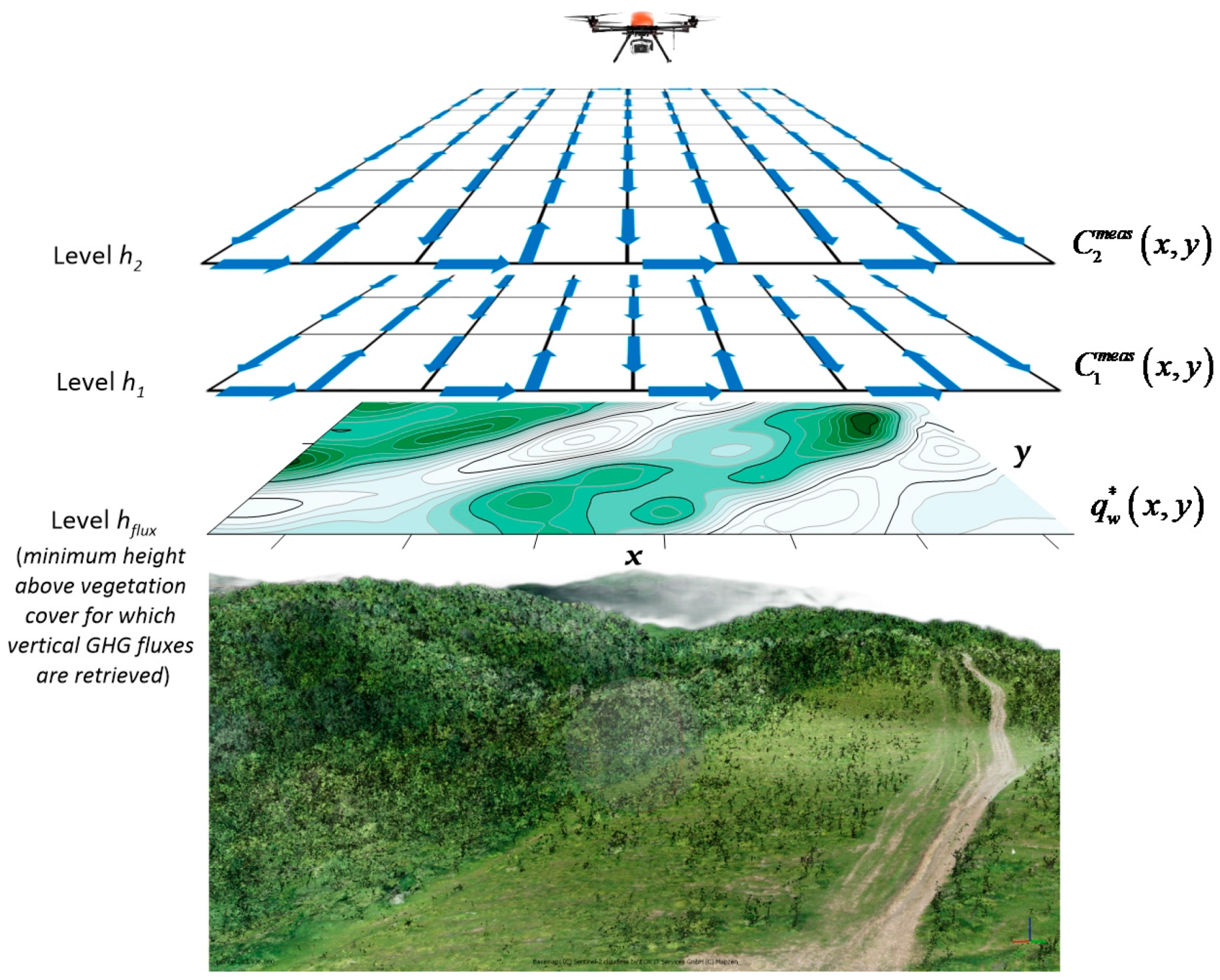
- Collecting concentration data over complex terrain at two levels within the atmospheric surface layer with some spatial resolution.
- Estimating airflow characteristics over the study area that can be measured directly by the UAV or derived from the ABL model.
- Making a first approximation of the GHG flux distribution over the area of interest using the collected concentrations and estimated airflow characteristics.
- Deriving the required distribution of vertical fluxes by solving the inverse problem (5) multiple times with intentionally varying function as input data. The solution is achieved by minimizing functional (6).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pörtner, H.O.; Roberts, D.C.; Tignor, M.; Poloczanska, E.S.; Mintenbeck, K.; Alegría, A.; Craig, M.; Langsdorf, S.; Löschke, S.; Möller, V.; et al. (Eds.) IPCC, 2022: Climate Change 2022: Impacts, Adaptation, and Vulnerability; Contribution of Working Group II to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2022; p. 3056. [Google Scholar]
- Yue, X.L.; Gao, Q.X. Contributions of natural systems and human activity to greenhouse gas emissions. Adv. Clim. Change Res. 2018, 9, 243–252. [Google Scholar] [CrossRef]
- Friedlingstein, P.; O’Sullivan, M.; Jones, M.W.; Andrew, R.M.; Bakker, D.C.E.; Hauck, J.; Landschützer, P.; Le Quéré, C.; Luijkx, I.T.; Peters, G.P.; et al. Global Carbon Budget. Earth Syst. Sci. Data. 2023, 15, 5301–5369. [Google Scholar] [CrossRef]
- Aubinet, M.; Vesala, T.; Papale, D. Eddy Covariance: A Practical Guide to Measurement and Data Analysis; Springer: Dordrecht, The Netherlands, 2012; p. 438. [Google Scholar]
- Baldocchi, D.; Hicks, B.; Meyers, T. Measuring biosphere—Atmosphere exchanges of biologically related gases with micrometeorological methods. Ecology 1988, 69, 1331–1340. [Google Scholar] [CrossRef]
- Foken, T.; Wichura, B. Tools for quality assessment of surface-based flux measurements. Agric. For. Meteorol. 1996, 78, 83–105. [Google Scholar] [CrossRef]
- Ibrom, A.; Schütz, C.; Tworek, T.; Morgenstern, K.; Oltchev, A.; Falk, M.; Constantin, J.; Gravenhorst, G. Eddy-correlation measurements of fluxes of CO2 and H2O above a spruce forest. J. Phys. Chem. Earth 1996, 21, 409–414. [Google Scholar] [CrossRef]
- Jägermeyr, J.; Gerten, D.; Lucht, W.; Hostert, P.; Migliavacca, M.; Nemani, R. A high-resolution approach to estimating ecosystem respiration at continental scales using operational satellite data. Glob. Change Biol. 2014, 20, 1191–1210. [Google Scholar] [CrossRef] [PubMed]
- Junttila, S.; Kelly, J.; Kljun, N.; Aurela, M.; Klemedtsson, L.; Lohila, A.; Nilsson, M.B.; Rinne, J.; Tuittila, E.-S.; Vestin, P.; et al. Upscaling northern peatland CO2 fluxes using satellite remote sensing data. Remote Sens. 2021, 13, 818. [Google Scholar] [CrossRef]
- Wang, S.; Garcia, M.; Ibrom, A.; Bauer-Gottwein, P. Temporal interpolation of land surface fluxes derived from remote sensing—Results with an unmanned aerial system. Hydrol. Earth Syst. Sci. 2020, 24, 3643–3661. [Google Scholar] [CrossRef]
- Bolek, A.; Heimann, M.; Göckede, M. UAV based in situ measurements of CO2 and CH4 fluxes over complex natural ecosystems. Atmos. Meas. Tech. Discuss. 2024, 2024, 27. [Google Scholar]
- Baldocchi, D.; Falge, E.; Gu, L.; Olson, R.; Hollinger, D.; Running, S.; Anthoni, P.; Bernhofer, C.; Davis, K.; Evans, R.; et al. FLUXNET: A new tool to study the temporal and spatial variability of ecosystem-scale carbon dioxide, water vapor and energy flux densities. Bull. Am. Meteorol. Soc. 2001, 82, 2415–2434. [Google Scholar] [CrossRef]
- Papale, D.; Black, T.A.; Carvalhais, N.; Cescatti, A.; Chen, J.; Jung, M.; Kiely, G.; Lasslop, G.; Mahecha, M.; Margolis, H.; et al. Effect of spatial sampling from European flux towers for estimating carbon and water fluxes with artificial neural networks. J. Geophys. Res. Biogeosci. 2015, 120, 1941–1957. [Google Scholar] [CrossRef]
- Baldocchi, D. How eddy covariance flux measurements have contributed to our understanding of Global Change Biology. Glob. Change Biol. 2020, 26, 242–260. [Google Scholar] [CrossRef] [PubMed]
- Villarreal, S.; Vargas, R. Representativeness of FLUXNET sites across Latin America. J. Geophys. Res. Biogeosci. 2021, 126, 1–18. [Google Scholar] [CrossRef]
- Foken, T. The energy balance closure problem: An overview. Ecol. Appl. 2008, 18, 1351–1367. [Google Scholar] [CrossRef] [PubMed]
- Pumpanen, J.; Kolari, P.; Ilvesniemi, H.; Minkkinen, K.; Vesala, T.; Niinisto, S.; Lohila, A.; Larmola, T.; Morero, M.; Pihlatie, M.; et al. Comparison of different chamber techniques for measuring soil CO2 efflux. Agric. For. Meteorol. 2004, 123, 159–176. [Google Scholar] [CrossRef]
- Olchev, A.; Volkova, E.; Karataeva, T.; Novenko, E. Growing season variability of net ecosystem CO2 exchange and evapotranspiration of a sphagnum mire in the broad-leaved forest zone of European Russia. Environ. Res. Lett. 2013, 8, 035051. [Google Scholar] [CrossRef]
- Molchanov, A.G.; Kurbatova, Y.A.; Olchev, A.V. Effect of Clear-Cutting on Soil CO2 Emission. Biol. Bull. 2017, 44, 218–223. [Google Scholar] [CrossRef]
- Mohren, G.M.J.; Hasenauer, H.; Köhl, M.; Nabuurs, G.J. Forest inventories for carbon change assessments. Curr. Opin. Environ. Sustain. 2012, 4, 686–695. [Google Scholar] [CrossRef]
- Deng, Z.; Ciais, P.; Tzompa-Sosa, Z.A.; Saunois, M.; Qiu, C.; Tan, C.; Sun, T.; Ke, P.; Cui, Y.; Tanaka, K.; et al. Comparing national greenhouse gas budgets reported in UNFCCC inventories against atmospheric inversions. Earth Syst. Sci. Data 2021, 14, 1639–1675. [Google Scholar] [CrossRef]
- Li, C.; Han, W.; Peng, M. Improving the spatial and temporal estimating of daytime variation in maize net primary production using unmanned aerial vehicle-based remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 103, 102467. [Google Scholar] [CrossRef]
- Nasiri, V.; Darvishsefat, A.A.; Arefi, H.; Pierrot-Deseilligny, M.; Namiranian, M.; Le Bris, A. Unmanned aerial vehicles (UAV)-based canopy height modeling under leaf-on and leaf-off conditions for determining tree height and crown diameter (case study: Hyrcanian mixed forest). Can. J. For. Res. 2021, 51, 962–971. [Google Scholar] [CrossRef]
- Pourreza, M.; Moradi, F.; Khosravi, M.; Deljouei, A.; Vanderhoof, M.K. GCPs-Free Photogrammetry for Estimating Tree Height and Crown Diameter in Arizona Cypress Plantation Using UAV-Mounted GNSS RTK. Forests 2022, 13, 1905. [Google Scholar] [CrossRef]
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pope, D. Overview of small fixed-wing unmanned aircraft for meteorological sampling. J. Atmos. Ocean Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Jacob, J.D.; Chilson, P.B.; Houston, A.L.; Smith, S.W. Considerations for atmospheric measurements with small unmanned aircraft systems. Atmosphere 2018, 9, 252. [Google Scholar] [CrossRef]
- Barbieri, L.; Kral, S.T.; Bailey, S.C.C.; Frazier, A.E.; Jacob, J.D.; Reuder, J.; Brus, D.; Chilson, P.B.; Crick, C.; Detweiler, C.; et al. Intercomparison of small unmanned aircraft system (sUAS) measurements for atmospheric science during the LAPSE-RATE campaign. Sensors 2019, 19, 2179. [Google Scholar] [CrossRef] [PubMed]
- Shaw, J.T.; Shah, A.; Yong, H.; Allen, G. Methods for quantifying methane emissions using unmanned aerial vehicles: A review. Phil. Trans. R. Soc. 2021, 379, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Kunz, M.; Lavric, J.V.; Gasche, R.; Gerbig, C.; Grant, R.H.; Koch, F.T.; Schumacher, M.; Wolf, B.; Zeeman, M. Surface flux estimates derived from UAS-based mole fraction measurements by means of a nocturnal boundary layer budget approach. Atmos. Meas. Tech. 2020, 13, 1671–1692. [Google Scholar] [CrossRef]
- Reuter, M.; Bovensmann, H.; Buchwitz, M.; Borchardt, J.; Krautwurst, S.; Gerilowski, K.; Lindauer, M.; Kubistin, D.; Burrows, J.P. Development of a small unmanned aircraft system to derive CO2 emissions of anthropogenic point sources. Atmos. Meas. Tech. 2021, 14, 153–172. [Google Scholar]
- Wang, J.; Feng, L.; Palmer, P.I.; Liu, Y.; Fang, S.; Bösch, H.; O’Dell, C.; Tang, X.; Yang, D.; Liu, L.; et al. Large Chinese land carbon sink estimated from atmospheric carbon dioxide data. Nature 2020, 586, 720–723. [Google Scholar] [CrossRef] [PubMed]
- Hutchinson, M.; Oh, H.; Chen, W.-H. A review of source term estimation methods for atmospheric dispersion events using static or mobile sensors. Inf. Fusion 2017, 36, 130–148. [Google Scholar] [CrossRef]
- Ristic, B.; Gilliam, C.; Moran, W.; Palmer, J.L. Decentralized multi-platform search for a hazardous source in a turbulent flow. Inf. Fusion 2020, 58, 13–23. [Google Scholar] [CrossRef]
- Allen, G.; Hollingsworth, P.; Kabbabe, K.; Pitt, J.R.; Mead, M.I.; Illingworth, S.; Roberts, G.; Bourn, M.; Shallcross, D.E.; Percival, C.J. The development and trial of an unmanned aerial system for the measurement of methane flux from landfill and greenhouse gas emission hotspots. Waste Manag. 2019, 87, 883–892. [Google Scholar] [CrossRef] [PubMed]
- Pirk, N.; Aalstad, K.; Westermann, S.; Vatne, A.; van Hove, A.; Tallaksen, L.M.; Cassiani, M.; Katul, G. Inferring surface energy fluxes using drone data assimilation in large eddy simulations. Atmos. Meas. Tech. 2022, 15, 7293–7314. [Google Scholar] [CrossRef]
- Carbon Supersites. Available online: https://carbon-polygons.ru/en/ (accessed on 29 April 2024).
- Mukhartova, I.; Kurbatova, J.; Tarasov, D.; Gibadullin, R.; Sogachev, A.; Olchev, A. Modeling tool for estimating carbon dioxide fluxes over a non-uniform boreal peatland. Atmosphere 2023, 14, 625. [Google Scholar] [CrossRef]
- Mukhartova, Y.; Levashova, N.; Olchev, A.; Shapkina, N. Application of a 2D model for describing the turbulent transfer of CO2 in a spatially heterogeneous vegetation cover. Mosc. Univ. Phys. Bull. 2015, 70, 14–21. [Google Scholar] [CrossRef]
- Mukhartova, Y.; Dyachenko, M.; Mangura, P.; Mamkin, V.; Kurbatova, J.; Olchev, A. Application of a three-dimensional model to assess the effect of clear-cutting on carbon dioxide exchange at the soil—Vegetation—Atmosphere interface. IOP Conf. Ser. Earth Environ. Sci. 2019, 368, 012036. [Google Scholar] [CrossRef]
- Sogachev, A.; Kelly, M.; Leclerc, M.Y. Consistent Two-Equation Closure Modelling for Atmospheric Research: Buoyancy and Vegetation Implementations. Bound. Layer Meteorol. 2012, 145, 307–327. [Google Scholar] [CrossRef]
- Allen, T.; Zerroukat, M. A simple immersed boundary forcing for flows over steep and complex orography. Q. J. R. Meteorol Soc. 2020, 146, 3488–3502. [Google Scholar] [CrossRef]
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1998; p. 666. [Google Scholar]
- Sogachev, A.; Menzhulin, G.V.; Heimann, M.; Lloyd, J. A simple three-dimensional canopy-planetary boundary layer simulatiom model for scalar concentrations and fluxes. Tellus 2002, 54, 784–819. [Google Scholar]
- Sogachev, A.; Panferov, O. Modification of two-equation models to account for plant drug. Bound. Layer Meteorol. 2006, 121, 229–266. [Google Scholar] [CrossRef]
- Garratt, J.R. The Atmospheric Boundary Layer; Cambridge University press: Cambridge, UK, 1992; p. 316. [Google Scholar]
- Foken, T. Micrometeorology; Springer-Verlag Publishers: Berlin/Heidelberg, Germany, 2008; p. 306. [Google Scholar]
- Blanken, P.D.; Williams, M.W.; Burns, S.P.; Monson, R.K.; Knowles, J.; Chowanski, K.; Ackerman, T. A comparison of water and carbon dioxide exchange at a windy alpine tundra and subalpine forest site near Niwot Ridge, Colorado. Biogeochemistry 2009, 95, 61–76. [Google Scholar] [CrossRef]
- Feigenwinter, C.; Bernhofer, C.; Eichelmann, U.; Heinesch, B.; Hertel, M.; Janous, D.; Kolle, O.; Lagergren, F.; Lindroth, A.; Minerbi, S.; et al. Comparison of horizontal and vertical advective CO2 fluxes at three forest sites. Agric. For. Meteorol. 2008, 148, 12–24. [Google Scholar] [CrossRef]
- Leuning, R.; Zegelin, S.J.; Jones, K.; Keith, H.; Hughes, D. Measurement of horizontal and vertical advection of CO2 within a forest canopy. Agric. For. Meteorol. 2008, 148, 1777–1797. [Google Scholar] [CrossRef]
- Mukhartova, I.V.; Olchev, A.V.; Gibadullin, R.R.; Lukyanenko, D.V.; Makmudova, L.S.; Kerimov, I.A. Inverse problem for retrieving greenhouse gas fluxes at the non-uniform underlying surface from measurements of their concentrations at several levels. J. Phys. Conf. Ser. 2024, 2701, 012141. [Google Scholar] [CrossRef]
- Olchev, A.V.; Mukhartova, I.V.; Kerimov, I.A.; Gibadullin, R.R. 3D Hydrodynamic Modeling of CO2 and CH4 Fluxes in the Atmospheric Surface Layer (example of the Roshni-chu Forest Site). Sustain. Dev. Mt. Territ. 2023, 15, 408–418. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Koppen-Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef]
- Pridacha, V.B.; Makhmudova, L.S.; Semin, D.E.; Olchev, A.V. Photosynthetic Parameters of the Woody Plant Species in the in the Foothills of Northern Caucasian Broadleaved Forests. Grozny Nat. Sci. Bull. 2022, 7, 105–112. [Google Scholar]
- Kerimov, I.A.; Ezirbaev, T.B. Experiences in the Application of Multispectral Imagery in Land Cover Observation. Ecol. Environ. Prot. Carbon Neutrality Dev. 2022, 12, 182–193. [Google Scholar]
- Olchev, A.; Radler, K.; Sogachev, A.; Panferov, O.; Gravenhorst, G. Application of a three-dimensional model for assessing effects of small clear-cuttings on radiation and soil temperature. Ecol. Model. 2009, 220, 3046–3056. [Google Scholar] [CrossRef]
- Nocedal, J.; Öztoprak, F.; Waltz, R.A. An interior point method for nonlinear programming with infeasibility detection capabilitie. Optim. Methods Softw. 2014, 29, 837–854. [Google Scholar] [CrossRef]
- Finnigan, J.J.; Belcher, S.E. Flow over a hill covered with a plant canopy. Q. J. Roy. Meteorol. Soc. 2004, 130, 1–29. [Google Scholar] [CrossRef]
- Dupont, S.; Brunet, Y.; Finnigan, J. Large-eddy simulation of turbulent flow over a forested hill: Validation and coherent structure identification. Q. J. Roy. Meteorol. Soc. 2008, 134, 1911–1929. [Google Scholar] [CrossRef]
- Liu, Z.; Hu, Y.; Fan, Y.; Wang, W.; Zhou, Q. Turbulent flow fields over a 3D hill covered by vegetation canopy through large eddy simulations. Energies 2019, 12, 3624. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fluxes | Mean Value, µmol/(m2s) |
|---|---|
| Target flux | −15.34 |
| Retrieved flux for ΔC = 0.5 ppm and 10 × 20 data points | −19.01 |
| Retrieved flux ΔC = 1 ppm, 10 × 20 data points | −19.17 |
| Retrieved flux ΔC = 2 ppm, 10 × 20 data points | −19.88 |
| Retrieved flux ΔC = 0.5 ppm, 15 × 30 data points | −18.35 |
| Retrieved flux ΔC = 1 ppm, 15 × 30 data points | −18.40 |
| Retrieved flux ΔC = 2 ppm, 15 × 30 data points | −18.68 |
| Fluxes | Mean Value, nmol/(m2s) |
|---|---|
| Target flux | −0.59 |
| Retrieved flux for ΔC = 1 ppb and 10 × 20 data points | −0.69 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mukhartova, I.; Sogachev, A.; Gibadullin, R.; Pridacha, V.; Kerimov, I.A.; Olchev, A. An Inverse Modeling Approach for Retrieving High-Resolution Surface Fluxes of Greenhouse Gases from Measurements of Their Concentrations in the Atmospheric Boundary Layer. Remote Sens. 2024, 16, 2502. https://doi.org/10.3390/rs16132502
Mukhartova I, Sogachev A, Gibadullin R, Pridacha V, Kerimov IA, Olchev A. An Inverse Modeling Approach for Retrieving High-Resolution Surface Fluxes of Greenhouse Gases from Measurements of Their Concentrations in the Atmospheric Boundary Layer. Remote Sensing. 2024; 16(13):2502. https://doi.org/10.3390/rs16132502
Chicago/Turabian StyleMukhartova, Iuliia, Andrey Sogachev, Ravil Gibadullin, Vladislava Pridacha, Ibragim A. Kerimov, and Alexander Olchev. 2024. "An Inverse Modeling Approach for Retrieving High-Resolution Surface Fluxes of Greenhouse Gases from Measurements of Their Concentrations in the Atmospheric Boundary Layer" Remote Sensing 16, no. 13: 2502. https://doi.org/10.3390/rs16132502