Abstract
The rapid development of uncrewed aerial vehicles (UAVs) has significantly increased their usefulness in various fields, particularly in remote sensing. This paper provides a comprehensive review of UAV path planning, obstacle detection, and avoidance methods, with a focus on its utilisation in both single and multiple UAV platforms. The paper classifies the algorithms into two main categories: (1) global and local path-planning approaches in single UAVs; and (2) multi-UAV path-planning methods. It further analyses obstacle detection and avoidance methods, as well as their capacity to adapt, optimise, and compute efficiently in different operational environments. The outcomes highlight the advantages and limitations of each method, offering valuable information regarding their suitability for remote sensing applications, such as precision agriculture, urban mapping, and ecological surveillance. Additionally, this review also identifies limitations in the existing research, specifically in multi-UAV frameworks, and provides recommendations for future developments to improve the adaptability and effectiveness of UAV operations in dynamic and complex situations.
1. Introduction
Uncrewed aerial systems (UASs), or drones, have become increasingly autonomous and advanced in terms of their performance and efficacy as time has progressed and have been adopted in a plethora of fields, such as precision agriculture, wildlife and ecological monitoring, and biosecurity [1]. A UAS consists of not only the uncrewed aerial vehicle (UAV), but also the UAS pilots who oversee the flight and the system in place that links the two. In essence, the UAV is a unit of the UAS, as it relates exclusively to the vehicle itself [2]. These entire systems comprise a UAV and a ground control station that is equipped with specialized software, sensor systems, and transmitters to enable the safe integration of the UAV and control tower station during operations [3].
UAV is a term referring to aircrafts that are either centrally controlled or autonomously piloted. UAVs are suitable for a wide range of applications, including scientific, commercial, surveillance, and defence operations. Drone mapping, object monitoring, and position tracking are common uses for UAVs because of their compact size, affordable operating costs, and ability for vertical takeoff and landing [4].
UAV path planning can be considered as a process in which drones develop a strategy for how to reach the target area safely and rapidly, with the plan relying heavily on the existing environment and position as a major factor. UAVs must be fully aware of their status to perform missions effectively. Examples of their status include being aware of its position, travel speed, direct route, as well as reference point and destination. However, multi-UAV operations are a more complicated and time-consuming study topic, resulting in higher computing costs compared to a single UAV mission [5].
Efficient path planning is an essential element for UAS operations, as it enables the UAV to calculate the best possible path from its current location to the target destination, while also avoiding obstacles and following operational limitations [6]. Figure 1 demonstrates that the initiation of the path planning process involves gathering environmental data using sensors and maps, which form the basis for navigation decisions. Following that, the UAV employs path-planning algorithms to compute and optimise the most effective route, considering the static or dynamic nature of the surroundings. Real-time obstacle avoidance and detection enable the UAV to keep focus on its surroundings and change course as needed to avoid collisions. While detecting obstructions or changes in conditions, the UAV adjusts its trajectory to ensure safety and enhance performance in an optimal manner. Finally, the UAV follows the planned route, constantly adapting to any unexpected deviations. This procedure ensures reliable, effective, and secure navigation in challenging terrain, unpredictable circumstances, and operating limitations.
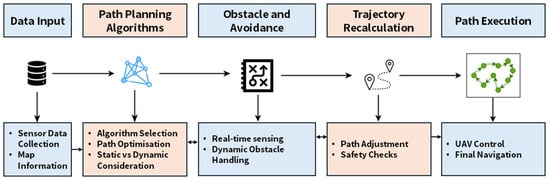
Figure 1.
UAV path-planning process in various conditions.
Although the scope of research is growing, there is still a significant deficiency in comprehensive investigations that compare different path-planning algorithms, particularly for multi-UAV frameworks [7]. The rapid development of UAV technologies in recent years has been attributed to notable progress in integrating sensors, artificial intelligence, and the processing of the data in real time. These advancements have broadened the functional capacities of UAVs, allowing for more intricate and autonomous operations in diverse sectors [8]. While several reviews on UAV path-planning algorithms for multiple UAVs are available, they tend to focus on specific algorithms or particular applications, rather than presenting a comprehensive overview of the field [9,10]. These reviews often fall short of providing a comprehensive analysis of the integration between path-planning and obstacle avoidance methods, especially in the context of remote sensing and the latest advancements in multi-UAV coordination [11,12]. In contrast, this paper provides an in-depth review that combines both path-planning and obstacle avoidance strategies, with a specific focus on their applicability in multi-UAV platforms for remote sensing.
This research aims to address this deficiency by conducting an exhaustive review of path-planning algorithms and obstacle avoidance methods, with a specific emphasis on their suitability in the field of remote sensing. This paper makes significant contributions by conducting a comprehensive assessment of the current methodology, identifying research challenges, and providing recommendations for future advancements in UAV technology. The subsequent sections will methodically examine these subjects, first with an overview of the technique used for this study.
The rest of the paper is arranged in the following manner. Section 2 explains the methodology used in the study. In Section 3, a thorough investigation of UAV path-planning methods is presented. A discussion on UAV obstacle detection and avoidance approaches is presented in Section 4. The methods, techniques, and algorithms used in remote sensing applications are discussed in Section 5. Section 6 presents the concluding remarks of this review.
2. Methodology
This review provides a comprehensive analysis of both single and multiple UAV platforms, explicitly addressing the difficulties related to path-planning algorithms, obstacle detection, and avoidance methods across various scenarios. This research aims to evaluate single and multi-UAV frameworks to identify the algorithms that perform well in these situations as well as their limitations. To accomplish this, precise benchmarks were set for each category. These benchmarks serve as a standard for evaluating the adaptability, optimisation, limitations, and overall effectiveness of the algorithms. This comprehensive review expands the scope of previous research by including the latest developments in multi-UAV path-planning algorithms, specifically focusing on remote sensing applications.
The methodology is organised on the following key steps:
- Bibliographic Analysis: The literature review was organised using three databases: Scopus, IEEE Xplore, and Science Direct, with the following set of keywords: ‘UAV’, ‘Path planning’, ‘Obstacle Avoidance’, ‘Collision Avoidance’, and ‘Remote Sensing’. The search results provided a total of 670 research papers published during the past fourteen years. Figure 2 shows information collected from the Scopus database on the quantity and countries of articles that address path-planning algorithms with obstacle avoidance in both single and multi-UAV platforms using UAS technology. However, a meticulous process was carried out to choose the most relevant papers, specially focusing on path-planning algorithms based on UAVs in remote sensing applications and navigation approaches. Unrelated articles were removed, leading to the collection of 116 highly relevant publications.
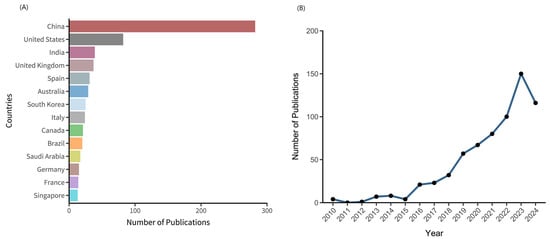 Figure 2. (A) Published articles by top 14 countries ranked by number of publications. (B) Number of published articles on UAV path planning with obstacle avoidance in remote sensing topics from 2010 to early 2024 (Source: Scopus).
Figure 2. (A) Published articles by top 14 countries ranked by number of publications. (B) Number of published articles on UAV path planning with obstacle avoidance in remote sensing topics from 2010 to early 2024 (Source: Scopus). - Performance Evaluation: The selected papers were assessed according to distinct performance criteria for UAV path planning, strategies for detecting and avoiding obstacles, and remote sensing applications. The criteria for path planning algorithms include adaptiveness, executing environment, advantages, optimisation, and limitations. Obstacle detection and avoidance approaches were evaluated based on parameters such as methods, sensors, executing environment, advantages, limitations of the methods, and optimisation. The requirements for remote sensing applications include accuracy, advantages, data processing efficiency, and adaptability to the environment.
- Research Questions: This review is guided by specific research questions that seek to discover the most efficient algorithms and approaches for UAV operations. The following questions are included:
- (a)
- What are the performance metrics for the frequently used path-planning algorithms, obstacle detection, and avoidance methods?
- (b)
- What is the overall performance of these algorithms in terms of obtaining optimal solutions?
- (c)
- What are the areas of research that demonstrate potential in the context of single and multiple UAVs for the purposes of path planning and obstacle avoidance?
- (d)
- What is the level of effectiveness of the algorithms employed in remote sensing applications in terms of accuracy and efficiency in processing data?
- Comparative Analysis: The review undertakes a study to compare the algorithms based on the given performance criteria. The purpose of this research is to explain the advantages and constraints of each strategy, offering an individual comprehension of their suitability in different scenarios.
The performance criteria utilised in this study are briefly outlined in Table 1 below.

Table 1.
Summary of the key literature on UAV path-planning and obstacle detection methods (2010–2024), including journal and conference publications.
This methodology presents a systematic approach to examine and evaluate the latest advancements in UAV path-planning, obstacle detection, and avoidance algorithms, as well as their application in remote sensing. The results of the study will be discussed in the following sections, specifically addressing the planning of paths for both individual and multi-UAVs in Section 3, the methods for detecting and avoiding obstacles in Section 4, and the use of these techniques in remote sensing in Section 5.
3. Path-Planning Algorithms Used in UAVs
Path planning is an essential aspect of UAV operations because it allows the vehicle to navigate efficiently while avoiding obstacles and adhering to mission specifications. Path-planning techniques can be classified into two main categories: (1) global path planning and (2) local path planning. Global path planning is the development of an optimal route from the current location of the UAV to the desired destination, including a thorough understanding of the surrounding environment to minimise trip distance and avoid static impediments. On the other hand, local path planning is specifically developed for dynamic situations, where the UAV needs to adjust its course in real time to avoid unexpected obstructions or react to altering circumstances. This strategy prioritises rapid decision-making and computing efficiency, often sacrificing the discovery of the absolute optimal solution. Additionally multi-UAV route planning introduces an additional level of complexity, requiring the synchronisation of multiple UAVs to accomplish a common goal while preventing collisions and optimising their combined performance. Effective planning is crucial for operations that entail the coordinated efforts of several UAVs, particularly when they operate in swarms. This planning process typically integrates aspects of both global and local path planning as well as sophisticated coordination mechanisms, shown in Figure 3.
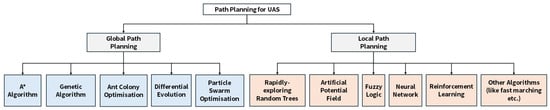
Figure 3.
Studied path-planning algorithms for single UAVs in different scenarios.
3.1. Global Path Planning
Different acknowledged algorithms have been developed for global path planning in static circumstances where the topography and obstructions are predetermined. These methods involve a range of algorithms specifically developed to enhance the path selection of UAS to ensure both efficiency and safety. Notable instances include the A* algorithm [13], a commonly used network search strategy that ensures the discovery of the shortest path; genetic algorithms (GAs) [14], which utilise evolutionary principles to progressively enhance path solutions; particle swarm optimisation (PSO) [15], which improves paths by simulating the collective movement of a swarm, inspired by the social behaviour of birds; differential evolution (DE) [16], which highlights global optimisation through mutation and recombination strategies; and ant colony optimisation (ACO) [17], which imitates the pheromone-laying behaviour of ants to uncover optimal paths. Each of these algorithms provides unique benefits in terms of computational efficiency, adaptability, and efficacy in different circumstances, making them essential instruments in the global path planning of UAVs.
A* algorithm: The A* algorithm is a network search approach developed for autonomous systems. A mathematically efficient heuristic approach is used to determine the optimal route across a distributed system [18]. Dilip et al. presents a comparison of the A*, Theta*, and Lazy Theta* algorithms for the use of UAV navigation planning in 3D environments [19]. The A* algorithm is fast but produces lengthier and less seamless paths, whereas the Theta* and Lazy Theta* algorithms provide shorter and smoother paths, particularly the Lazy Theta*, which exhibits a superior processing efficiency. Nevertheless, the research is constrained to static scenarios and fails to consider dynamic barriers. In response to these limitations, a hybrid methodology that integrates the A* algorithm with the dynamic window approach (DWA) to improve the process of UAV route planning was presented by Bai et al. [20]. Combining obstacle weights and motion constraints to A* optimises global path planning, whereas DWA avoids local optima and smoothest paths. The integration of these two approaches yields shorter routes, decreases planning duration, and enhances obstacle avoidance. Despite this, this method is restricted to static and moderately dynamic environments. Similarly, Chen et al. proposed improvements to the conventional A* algorithm used for path planning in UAVs [21]. The proposed method aims to overcome the limitations of the conventional A* algorithm, including its inefficiency in handling vast environments and its lengthy execution requirements. Enhancements include optimising the evaluation function and implementing directional constraints to minimise the number of nodes traversed during the search process, therefore improving both the efficiency and success rate of pathfinding. However, this approach predominantly functions in static environments without considering real-time dynamic obstacles. Furthermore, the fusion approach integrates an improved A* algorithm with quadratic programming to effectively handle UAV trajectories in cluttered and intricate airspaces [22]. This approach demonstrates exceptional proficiency in assuring safety and cost-efficiency, while it may encounter obstacles regarding the availability of computational resources on board.
ACO algorithm: The ACO approach is a replication of the collaborative behaviour observed in ant colonies, where the shortest route to a food source and back to the colony is always established through teamwork. Duo Qi et al. proposed improvements to the ACO algorithm for UAV path planning [23]. These upgrades include the incorporation of a dynamic heuristic function, enhanced state transitions, and the use of cubic B-spline smoothing to provide a faster convergence and smoother trajectories. Although the algorithm provides improved path selection and efficiency, it faces challenges in adapting to changing environments and meeting the increased processing requirements, potentially impacting its real-time performance.
The conventional ACO algorithm was improved by Guangxing et al. through the optimisation of pheromone-updating rules and the adjustment of heuristic weight factors [24]. This results in a quicker convergence and smoother pathways in 3D environments. Although the enhanced method provides superior global optimisation and path smoothness, it encounters difficulties due to higher processing requirements, especially in real-time scenarios, and struggles to handle dynamic obstructions. Another article presented by Liu et al. further improved the conventional ACO algorithm by incorporating a new guidance element and elite ant pheromone-updating system, resulting in more seamless paths and faster convergence with fewer iterations [25]. However, while the algorithm improves computational efficiency, it encounters difficulties in dealing with the heightened complexity of dynamic environments and can face problems with real-time adaptability and performance in unanticipated scenarios. Hui et al. proposed additional improvements to the conventional ACO algorithm through the incorporation of multiple heuristic elements and the imposition of restrictions on pheromone levels to avoid local optimal conditions [26]. The optimised algorithm decreases the distance travelled and enhances the effectiveness of searching, making it highly suitable for complex environments. Regardless, the intricacy of the algorithm can cause difficulties in real-time scenarios, and the framework might encounter challenges when dealing with dynamic and unforeseen obstacles.
DE algorithm: The DE algorithm is a method used for global optimisation that integrates mutation, crossover, and selection. In contrast to the genetic algorithm, differential evolution uses the difference vectors from each parent generation to form the mutation vector. The research article presented by Zhang et al. introduced an enhanced version of the DE algorithm specifically designed for optimising the trajectory planning of UAVs in difficult mountainous landscapes [27]. The multi-strategy improved DE (MSIDE) method combines adaptive mutation and crossover techniques, an elite disturbance mechanism, and population categorisation to improve the ability to search globally, the speed of convergence, and the accuracy. Although the MSIDE algorithm greatly enhances path-planning performance, especially in intricate surroundings, it also amplifies the computing complexity, posing a challenge for real-time implementation. In dynamic circumstances, the use of numerous techniques can reduce the simplicity of algorithms and raise the possibility of overfitting.
To address these issues, Chen et al. developed a new parameter titled ACVDEPSO (cylinder vector and different evolution operator) [28]. This algorithm combines cylindrical coordinates and adaptive parameter strategies with differential evolution to improve path planning in complicated 3D scenarios. The method exhibits a superior convergence speed and enhanced precision in identifying optimal pathways as compared to the conventional DE and PSO variations. Nevertheless, the complexity of the technique and its heightened computational requirements can pose difficulties in real-time applications, particularly in extremely dynamic environments. The combination of the grey wolf optimizer (GWO) and DE algorithms to improve the path planning of UAVs was presented by Yu et al. [29]. The HGWODE method optimally balances the process of exploring new possibilities and exploiting existing knowledge, resulting in more streamlined and concise paths in comparison to using the GWO algorithm alone. However, the heightened complexity of this hybrid approach can result in greater computational requirements, especially in real-time scenarios. Furthermore, although the algorithm enhances the efficiency of path planning, it may encounter difficulties in handling dynamic surroundings and adapting to real-time scenarios.
Another hybrid algorithm (HDEFWA) that combines DE and fireworks algorithm (FWA) to optimise path planning for UAVs was proposed by Xiangsen et al. [30]. The hybrid strategy combines the mutation, crossovers, and selecting mechanisms of DE with the explosion mechanism of FWA to enhance global search abilities and prevent becoming stuck in local optimal situations. The programme has exceptional performance in developing optimal pathways when compared to other sophisticated algorithms. Despite this, the increased complexity of integrating DE and FWA can result in greater computational requirements, potentially impeding real-time applications, especially in dynamic environments. Xaiobing et al. presented a unique DE algorithm specifically designed for the purpose of path planning for UAVs in disaster relief circumstance [31]. The algorithm’s primary objective is to identify a knee solution within a Pareto front. It accomplishes this by directing the search towards generating optimal pathways that have both minimal distance and minimal risk. Although the technique effectively manages various objectives and limitations, its dependence on the knee point can restrict the investigation of other solutions in dynamic situations. In addition, the intricacy of the technology may provide difficulties in real-time applications where computational performance is crucial.
PSO algorithm: Path-planning problems are frequently addressed using sophisticated algorithms such as particle swarm optimisation (PSO). Mingyu et al. introduced a modified PSO method for 2D settings with static obstacles [32]. The time-varying adaptive inertia weight dynamically modifies particle variety to balance exploration and exploitation, improving the speed of convergence and path optimisation. The technique generates better UAV pathways with less iterations than classic PSO approaches. However, adaptive inertia weight complexity can increase the processing demands, making real-time implementation difficult. While this study focuses on static obstacles, the effectiveness of this algorithm in dynamic scenarios remains uncertain.
To improve UAV path planning in complicated situations with various hazards, a novel spherical vector-based particle swarm optimisation (SPSO) technique was introduced by Manh et al. [33]. This algorithm considers safety limitations including threats, turn angles, and flight height and uses spherical vectors to represent UAV movement to optimise path planning. SPSO generates viable, safe, and optimal pathways better than PSO variations and other metaheuristic algorithms in most cases. SPSO performs well in complicated contexts, although premature convergence and computing complexity can pose problems in highly dynamic conditions. Moreover, the algorithm’s ability to handle larger search spaces can be limited. Another PSO-based chaos theory-based solution to UAV path planning in complicated 3D landscapes with various hazards was proposed by Hongyue et al. [34]. To accelerate convergence and eliminate local optima, the improved nonlinear dynamic inertia weight PSO (VAINDIWPSO) and upgraded IC-VAINDIWPSO algorithms were proposed. The IC-VAINDIWPSO method outperforms the classical PSO in convergence speed, path smoothness, and fitness function values due to chaotic initialisation and adaptive velocity modifications. However, the algorithm’s complexity and processing needs can limit its real-time usefulness, especially in highly dynamic situations.
Another article introduced an enhanced PSO method (DCA∗PSO) with a dynamic divide-and-conquer strategy and A* algorithm, enhancing global search and convergence speed for UAV path planning in complicated 3D surroundings [35]. The DCA∗PSO method efficiently handles high-dimensional tasks by dividing them into smaller subproblems, avoiding local optima. The A* algorithm enhances path quality. The algorithm’s complexity and processing resource requirements may limit its use in real-time and highly dynamic applications. Although DCA∗PSO excels at producing optimal pathways, its flexibility for rapidly changing surroundings remains a challenge. To improve global search and prevent optimal local search for UAVs, Zhenhua et al. introduced SDPSO, a hybrid PSO algorithm that uses simulated annealing (SA) [36]. Adding a dimensional learning method (DLS) speeds convergence and prevents particle deterioration. Compared to PSO and other heuristic algorithms, SDPSO has a faster convergence, better path quality, and greater robustness in complicated 3D scenarios. However, integrating SA with DLS can increase complexity and processing demands, limiting its use in real-time dynamic applications. Highly dynamic and unpredictable surroundings can also challenge the algorithm.
GA algorithm: The heuristic search known as the genetic algorithm (GA) is based on the ideas of genetics and natural selection. It is highly efficient in addressing optimisation issues characterised by an extensive and complex solution space. GA is used in UAV path planning to find the optimal or nearly optimum paths by iteratively creating a set of viable possibilities across several generations. A fitness function is used by selection, crossover, and mutation operators to constantly improve paths while minimising energy consumption, risk, and path length. Several researchers proposed the use of GA, an evolutionary computing method, to find the optimal flying path for UAVs. It is essential to solve the TSP to arrive at an optimum path using the method described in [37]. To solve the TSP for UAVs in particular, the article used GA. The algorithm successfully generates optimal paths in simulated environments. However, in situations with constantly changing obstacles, the algorithm performance may decline.
In their paper, Majeed et al. presented a GA method to improve UAV coverage efficiency across dispersed areas [38]. Although the approach efficiently addresses many objectives and restrictions, it encounters difficulties in terms of scalability when implemented in expansive urban circumstances. An enhanced GA that targets coverage was suggested in the paper by Pehlivanoglu et al. [39]. This improved GA shows better optimisation results. However, more computing power is needed due to the increased complexity of the method. Shivgan et al. used a GA to lower UAV flights’ energy consumption in their study [40]. The approach exhibits substantial energy conservation but can encounter difficulties when promptly adjusting to real-time conditions due to the intricate nature of the energy model. To make UAV path planning more efficient, Arantes et al. examined how heuristic approaches and genetic algorithms might work together [41]. While using a hybrid approach can speed up the convergence process, it also increases the chances of running across local optimal conditions. The study conducted by Galvez et al. showed the efficiency of the GA in 3D path planning, specifically in the avoidance of radar coverage zones [42]. The method is successful, but it can have challenges with real-time execution due to its computing requirements.
Comparative Analysis and Discussion for Section 3.1:
A comparative analysis was conducted to obtain a better understanding of the suitability and performance of different global path planning algorithms. Table 2 below provides a concise overview of the main features, benefits, and limitations of the well-known algorithms employed in UAV navigation. It offers valuable information on their adaptability, optimisation level, and suitable conditions for implementation.
Table 2.
Global path-planning algorithms used in UAV navigation.
The A* algorithm is renowned for optimising computing processes and ensuring dependable navigation along paths. However, it has challenges in terms of excessive storage consumption and managing large environments, which makes it more suitable for static settings with restricted dynamic obstacles. GAs are highly proficient in handling many objectives and can be quickly developed. However, they demand significant computational resources and encounter difficulties in evolving or unpredictable scenarios. They possess moderate optimisation capabilities, which makes them suitable for complex optimisation tasks. PSO indicates fast convergence and high efficiency; however, it can become stuck in local optima and encounters difficulties when dealing with expansive regions. It has a moderate level of adaptability and a high degree of optimisation, rendering it effective for various scenarios. DE is known for its robust ability to achieve global optimisation with a reduced number of iterations. However, it has computational challenges when used in dynamic situations. It demonstrates a moderate level of adaptability and a high level of optimisation, which makes it highly effective in difficult situations. ACO enhances path selection and exhibits flexibility, but it requires substantial computational resources and faces challenges in real-time adaptation. It demonstrates commendable adaptability and moderate optimisation, rendering it ideal for intricate dynamic situations. Each algorithm offers benefits and is customised to address specific issues in UAV navigation, showing varied levels of adaptability and efficiency in various circumstances.
3.2. Local Path Planning
RRT algorithm: A random sampling-based approach known as the rapidly exploring random tree (RRT) was developed for dynamic route planning by high-dimensional robotic manipulators due to its statistical completeness, rapid search capability, and fast exploration speed, exceeding other planning methods in challenging circumstances [43]. According to Chen et al., an updated version of the RRT* algorithm was developed [44]. This improved algorithm minimises the level of randomness in path development by integrating a two-way fast extension and biased sampling strategies. Although this technique enhances convergence speed and path optimisation, it still faces computational complexity in real-time dynamic situations. Guo et al. proposed the “FC-RRT” method, incorporating fuzzy control (FC) to regulate node selection randomness in complex 3D environments [45]. The algorithm demonstrates superior performance in situations with many obstacles; however, the inclusion of extra control logic may result in increased processing time and complexity.
Another article by Ren et al. introduces dynamic restrictions and heuristic search strategies to overcome the limits of conventional RRT algorithms, resulting in enhanced efficiency for multi-target missions [46]. There is a possibility that its scalability is compromised when used in more expansive and complex situations. The conventional RRT algorithm was developed by Yang et al. by incorporating a dynamic step approach and an obstacle avoidance mechanism [47]. While this improves the algorithm’s path efficiency and safety, it still has limitations when it comes to dealing with unpredictable and highly dynamic environments. Zhao et al. enhanced the RRT algorithm for UAV delivery situations by including time limitations and adaptable step sizes [48]. As a result of the complex structure of the distribution environment, this method can encounter difficulties with real-time adaptation, despite its ability to increase path reliability and decrease delivery time.
APF algorithm: Artificial potential field (APF) is a method of path planning that uses an artificial force to guide the UAV towards the desired destination while simultaneously avoiding its collision with obstacles. In their work, Selvam et al. enhanced the conventional APF by fixing the typical problems with local minima and reaching previously inaccessible problems with the use of a dynamic repulsion factor [49]. It is possible that this strategy will continue to struggle in highly dynamic situations with obstacles that are constantly changing, even though it increases the efficiency of path planning. Chen et al. introduced a 3D path-planning algorithm that enhances the APF method by incorporating potential field guide points [50]. These guide points assist the UAV in avoiding local minima and oscillations. However, the complexity of the algorithm increases the computational load, which makes real-time applications challenging.
To address local optimisation problems, Hao et al. improves APF even further by incorporating an obstacle-generated gravitational function into the repulsive function [51]. Although the method may be successful in simulation, it may encounter challenges in real-world applications due to its sensitivity to parameter adjustments. A further improvement was demonstrated in the article of Chen et al., which incorporated optimal control theory to fine-tune the potential field, leading to routes that are less irregular [52], although the approach’s dependence on precise environmental data may restrict its flexibility in unpredictable situations. As a last step towards better path stability, Yuhong et al. presented a novel boundary function in their article to restrict the UAVs’ flying area [53]. However, the algorithm can still encounter difficulties in dealing with path oscillations in locations with a high density of obstacles.
FL algorithm: Fuzzy logic (FL) is a mathematical method that effectively manages uncertainty by its use of levels of facts that range from 0 to 1, therefore rendering it well-suited for intricate decision-making processes in practical scenarios. The study utilised fuzzy logic to optimise the path planning of UAVs for search and rescue (SAR) missions [54]. It created a risk/occupancy map to assist UAVs in determining the most critical locations to focus on. This strategy is quite efficient in reducing both danger and travel time, while also optimising the search process, particularly under volatile conditions. However, the computing challenges and absence of real-time dynamic obstacle avoidance limits its use in complicated, dynamic circumstances.
To improve obstacle avoidance and optimise path efficiency in challenging environments, Dong et al. combined FL with virtual force techniques [55]. In real-time applications, this method may encounter difficulties with computing efficiency, despite its improvements in manoeuvrability and safety. The paper presented by Charis et al. integrated FL with GA to optimise many objectives, including distance, fuel efficiency, and safety [56]. While the hybrid technique provides a better performance, it also results in a higher computational complexity and may not be as ideal for missions that require quick response times. Another combination that improves FL by including an enhanced version of ACO, resulting in higher adaptability to changing environments, was presented by Qi et al. [57]. Even though this combination demonstrates potential for secure and cost-effective pathways, it may continue to encounter challenges in combining exploration and exploitation in extremely dynamic situations.
NN algorithm: A neural network (NN) is a model for machine learning inspired by the human brain that uses artificial neurones to identify patterns and make decisions. Yang et al. presented an article in which they proposed a residual convolutional neural network (RCNN) to improve the accuracy and reduce collision risks in complicated situations during real-time UAV path planning [58]. While the RCNN demonstrates a strong performance in simulated environments, its extensive computing requirements can be a restriction, particularly in situations with limited resources. Similarly, Wai et al. combined a neural network with a control system to optimise path planning while minimising energy use [59]. The system demonstrates efficiency in achieving a balance between these aims but faces challenges in promptly adapting to changes and cannot achieve ideal performance in dynamic and unpredictable situations.
Another innovative method that integrates mean-field game theory with neural networks to effectively handle path planning for various UAVs at the same time was proposed by Hamid et al. [60]. This system is proficient in managing processes on a broad scale, but it may face difficulties in terms of scalability and processing efficiency when dealing with more complex real-world situations. An application of neural network-based opportunistic control to manage UAV trajectories in dynamic situations with communication restrictions was also presented by Hamid et al. [61]. The technique improves the speed of travel and the effectiveness of energy usage, but it can be obstructed by unfavourable channel conditions and an increased computing intricacy linked to real-time updates.
RL algorithm: Reinforcement learning (RL) is an automated learning method that uses trial and error to optimise cumulative rewards in robotic systems. A novel deep reinforcement learning (DRL) framework that enhances the clarity and comprehensibility of decision-making processes in UAVs was presented by Lei et al. [62]. Although it achieves a good balance between exploration and exploitation, the algorithm’s computational burden makes it difficult to scale-up to challenging circumstances. Similarly, Bohao et al. utilised DRL to optimise the trajectory of a UAV as it tracks a mobile ground target [63]. Despite the algorithm’s enhanced tracking precision, it can have trouble in keeping up with dynamic situations in real time. Chao et al. presented a novel method called duelling double deep Q-networks (DDQNs) for the path planning of UAVs in situations that may contain potential dangers [64]. However, this method’s processing cost limits its real-time applicability, despite its greater adaptability to dynamic situations.
Another implementation of a DDQN focused on the task of enhancing the efficiency of UAV coverage missions while dealing with fluctuating power limitations was proposed by Micro et al. [65]. Although the strategy is efficient in achieving a balance between coverage and power utilisation, it can face challenges in circumstances where power consumption varies unexpectedly. Multi-layer reinforcement learning to improve the UAV’s capability to navigate complex environments was presented by Zhengyang et al. [66]. Though the algorithm has benefits in managing complicated systems with multiple layers, its complexity can impede real-time responsiveness. Additionally, Ronglei et al. introduced another DRL method that performs very well in large environments but can face challenges in rapidly adjusting to rapid modifications in dynamic scenarios [67].
Other algorithms: The integration of DE and fast marching square (FM2) techniques to enhance the efficiency of UAV coverage missions was proposed by Gonzalez et al. [68]. This hybrid strategy improves the smoothness and efficiency of paths, although it can face challenges in meeting the high computing requirements in real-time situations. Another FM2 approach was used to guarantee that flight-level limitations are satisfied while keeping pathways smooth [69]. Although the method is effective, it can fail to optimise paths when dealing with extremely diverse environments. To reduce risks in UAV operations, a failure analysis approach that incorporates a safety-oriented path-planning algorithm was proposed in [70]. Although the algorithm enhances safety, it can also lead to extended routes, which might be inefficient for missions that require prompt completion. Additionally, an improved version of the bat algorithm (BA) specifically designed for 3D situations was presented by Xianjin et al. [71]. This approach displays exceptional convergence and path optimisation capabilities but encounters difficulties when it comes to responding to changing situations.
Comparative Analysis and Discussion for Section 3.2:
Effective local route planning is essential in UAV operations, particularly when manoeuvring through complex and constantly shifting surroundings that require instant modifications. Different kinds of algorithms have been developed to address issues such as avoiding obstacles, improving computational efficiency, and enhancing adaptability in these dynamic situations. Table 3 presents a concise overview of the main features, advantages, and limitations of the well-known local path-planning algorithms. It offers a comparative examination of their flexibility, optimisation capabilities, and suitable execution conditions.
Table 3.
Local path-panning algorithms used in UAV navigation.
Table 3 provides an overview of different local path-planning algorithms employed in UAV navigation, focusing their advantages, limitations, ability to adjust, degree of optimisation, and suitable operational conditions. RRT is a very efficient method that provides quick evaluation and comprehensive statistical coverage. It is particularly successful in complex and changing situations with a large number of dimensions. Nevertheless, it faces complex calculations in dynamic environments, showing a high level of adaptability in static conditions and a modest level of adaptability in dynamic ones. The APF algorithm is effective in avoiding local minima and improving path planning. However, it faces challenges in navigating changing obstacles and is extremely dependent on the choices of its parameters. It performs well in static environments with many obstacles but has only moderate adaptability in static situations and low adaptability in highly dynamic scenarios. FL can make dynamic decisions and avoid obstacles, but it is computationally complex and struggles in complex dynamic circumstances. The system demonstrates a high level of adaptability in straightforward dynamic situations and a moderate level of adaptability in complex ones, making it suitable for situations that are dynamic and unpredictable. NNs are precise and effective in complex circumstances; however, processing power and computational demands limit them. They are optimised for complicated, resource-rich scenarios and have moderate to high adaptability. RL is flexible and handles difficult situations, but it requires considerable processing power and slow training. It performs well in dynamic and complex scenarios, demonstrating a high level of adaptability and optimisation. Other algorithms offer useful path optimisation and robustness but require significant processing power and struggle in real-time applications. They show moderate adaptiveness and moderate to high optimisation, ideal for large-scale, complicated environments. Every algorithm is designed to tackle different problems in UAV navigation, proposing customised solutions based on the complexity and dynamic nature of the scenario.
3.3. Path-Planning Algorithms Used in Multi-UAVs
The improvement in efficient path planning algorithms for multi-UAV platforms is essential for improving the performance of UAV missions in complex and dynamic environments. Metaheuristic, machine learning, and task-specific algorithms have been developed to address trajectory optimisation, energy efficiency, and real-time flexibility in multi-UAV systems. This section provides an overview of the most advanced algorithms used in multi-UAV route planning, with a specific emphasis on their specific contributions, advantages, and limitations.
3.3.1. Metaheuristic and Evolutionary Algorithms
Grey Wolf Optimizer: Cheng et al. introduced a modified version of the grey wolf optimizer (GWO) algorithm specifically designed for multi-UAV cooperative path planning [72]. The method improves the process of population initialisation, updating the decay factor and updating individual positions to optimise path planning in complex environments that contain various threats, such as radar and missile systems. The proposed approach offers improvements such as reduced path costs as well as faster convergence when compared to conventional approaches. It can be difficult to implement in real time due to the potential increase in computational demands caused by the GWO algorithm’s increased complexity. Furthermore, the algorithm’s performance in extremely dynamic environments with swiftly evolving threats continues to be a constraint.
Hybrid GWO and Local Search: To optimise multi-UAV path planning under energy restrictions, Gewen et al. presented a hybrid approach that combines discrete operations, the GWO, and a two-opt local search method [73]. The programme aims to minimise the overall monitoring duration by considering the energy usage in various flight modes, including accelerating, cruising, and hovering. This technique is suitable for large-scale, complex path planning problems due to its enhanced global convergence and local search capabilities. However, the algorithm’s complexity can restrict its real-time application and scalability in highly dynamic situations.
Whale Optimisation Algorithm: By combining a spiral update position approach inspired by the whale optimisation algorithm, Jiaqi et al. presented an adaptive multi-UAV route planning method that enhances the GWO algorithm [74]. This method enhances the rate at which convergence occurs and increases the smoothness of the path by adaptively modifying the number of leadership layers throughout the optimisation procedure. The experimental results indicate that the proposed strategy decreases the duration of the flight and improves the effectiveness of task fulfilment. Adaptive leadership mechanism and spiral update complexity can increase processing demands, restricting its real-time use in highly dynamic environments.
Hybrid Search and Connectivity Path Planning: Yanmaz proposed multi-UAV search and rescue paths that used joint and decoupled optimisation methods for UAV path planning in detection and connection scenarios [75]. The joint optimisation strategy combines search and connectivity tasks, speeding mission completion, while the decoupling approach improves connectivity but delays search. To balance these trade-offs, a hybrid method was proposed. The hybrid technique improves connectivity and mission time under certain conditions. Hybrid approaches are sophisticated, which can increase processing demands; hence, they may not be suitable for missions that have restricted UAV resources. In low UAV environments, the decoupled approach may increase mission duration.
Sparrow Search Algorithm: Qingli et al. presented a hybrid method that combines the sparrow search algorithm (SSA) with an enhanced bioinspired neural network (BINN) for the path planning of multi-UAVs in mountainous terrains [76]. The objective of this fusion technique is to enhance the stability and smoothness of the path, while also allowing for dynamic obstacle avoidance. The SSA is employed for global path planning, guaranteeing the most efficient routes, while the enhanced BINN manages local replanning in the presence of dynamic obstacles. This method offers several advantages over standard algorithms, including superior path optimisation and higher rates of success in avoiding obstacles. However, the intricate nature of the fusion process can result in increased computational requirements, thus limiting its capacity to be applied in real-time.
Many-Objective Evolutionary Algorithm: Hui et al. presented a many-objective evolutionary algorithm (MaOEA) aimed to optimise the cooperative trajectory planning of multiple UAVs [77]. The algorithm concurrently optimises many objectives, such as trajectory distance, time, threat, and coordination distance. It improves convergence speed and handles complex settings for multiple UAVs. Multi-objective optimisation can raise processing needs, limiting real-time applicability. Furthermore, the algorithm may encounter difficulties in terms of scalability while handling a substantial quantity of UAVs.
Multiple Swarm Fruit Fly Optimisation Algorithm: Kunming et al. presented a new method that utilises a multiple swarm fruit fly optimisation algorithm (MSFOA) to plan paths for multi-UAVs in complex environments [78]. The technique improves upon the classic fruit fly optimisation technique (FOA) by partitioning the swarm into many sub-swarms, hence enhancing both global and local search abilities. MSFOA offers superior convergence speed and accuracy in comparison to the classic FOA, as well as efficient collision detection among multiple UAVs. However, the complexity of MSFOA increases processing requirements, potentially constraining its real-time suitability in highly dynamic environments.
GA and Hybrid Approaches: The study conducted by Yan et al. investigated the application of a GA for solving the intricate challenge of multi-UAV cooperative reconnaissance across various bases [79]. The GA is utilised to optimise the process of path planning by minimising the duration of UAVs’ presence in radar detection zones while successfully accomplishing reconnaissance missions. This method solves complicated optimisation issues and generates workable solutions under numerous constraints. However, the GA’s convergence speed and processing complexity can restrict its real-time dynamic applications. In addition, the model assumes fixed target placements and does not include moving threats or changes in the environment.
To tackle the issue of multi-UAV path planning in forest monitoring scenarios, Yu et al. proposed a hybrid solution that combines GA with improved particle swarm optimisation (IPSO) [80]. The IPSO-GA algorithm seeks to minimise the quantity of UAVs and the total distance travelled, considering time windows and energy limitations. This hybrid strategy improves global optimisation, flying distance, and UAV number over IPSO or GA. In dynamic scenarios, the hybrid algorithm’s complexity can increase computational demands, making real-time applications difficult.
Multi-UAV trajectory optimisation in mobile edge computing (MEC) systems was demonstrated by Muhammad et al. using a genetic algorithm [81]. The suggested method aims to minimise the energy consumption of UAVs by optimising the placement of stop points (SPs) and the assignment of UAVs to these sites. The method incorporates a variable population size to dynamically regulate the quantity of SPs (service providers) and UAVs, hence enhancing both the effectiveness and scalability of the system. It improves optimisation and reduces energy consumption. However, the algorithm complexity can make real-time implementations difficult, especially in dynamic situations with frequently changing variables.
3.3.2. Reinforcement Learning and Machine Learning Approaches
MAXQ Reinforcement Learning with Simulated Annealing: Cheng et al. proposed a hybrid method that integrates MAXQ hierarchical reinforcement learning with simulated annealing (SA) to optimise the collaborative path planning of multiple UAVs [82]. The technique efficiently mitigates the problem of high dimensionality by breaking down the UAV path-planning work into smaller tasks, hence enhancing the efficiency of learning and optimising the path. Simulated annealing is employed to improve the search of the solution space, aiding the UAVs in avoiding local optima. The advantages of this strategy encompass accelerated convergence, enhanced path quality, and superior management of dynamic obstacles. Despite this, the intricate nature of the combined MAXQ and SA algorithm can result in increased computational requirements, which limits its real-time implementation in highly dynamic and large-scale scenarios.
Gradient-Based Sequential Minimum Optimisation (GB-SMO): Qiaoyang et al. presented a new method for planning the trajectory of multiple UAVs using a gradient-based sequential minimum optimisation (GB-SMO) algorithm [83]. Instead of utilising conventional waypoint segmentation, which adds complexity to the optimisation process, this method uses time segmentation, which simplifies the entire process. It demonstrates high efficacy in areas with numerous obstacles and when deployed in vast quantities of UAVs. The advantages include enhanced computational efficiency and superior performance in challenging conditions with many obstacles. However, the algorithm may encounter difficulties when dealing with dynamic obstacles and the need for real-time flexibility due to the decoupling method, which can result in delays in highly dynamic situations.
3.3.3. ACO and Hybrid Approaches
Hybrid DE and Maximum–Minimum Ant Colony Optimisation (MMACO): To optimise multi-UAV path planning in complicated dynamic situations, Zain Anwar et al. proposed a hybrid metaheuristic technique that combines differential evolution (DE) with maximum–minimum ant colony optimisation (MMACO) [84]. The MMACO method overcomes the constraints of conventional ACO by restricting pheromone updates and prioritising the creation of the best ant’s path, while DE improves global optimisation. This technique provides capabilities such as enhanced convergence speed and resilience in managing intricate situations. Combining MMACO with DE can increase computing demands, which may affect real-time implementation, especially in highly dynamic circumstances.
Hybrid ACO with DE and Cauchy Mutation: Two hybrid techniques were investigated by Shafiq et al. for planning UAV paths in complicated situations [85]. The max-min ant colony optimisation (MMACO) algorithm is enhanced with DE and Cauchy mutation (CM) techniques to improve the speed of convergence and the efficiency of the path. The MMACO-DE algorithm presented improved performance in terms of reduced path length and accelerated convergence when compared to the MMACO-CM. The hybrid technique may be too sophisticated for real-time use and scalability in dynamic situations.
3.3.4. Task-Specific Algorithms
Improved A* Algorithm for Search and Rescue: Yuwen developed an improved A* algorithm designed for multi-UAV search and rescue operations [86]. The method enhances path planning by including task allocation with A*, facilitating expedited and more effective pathfinding in complex 3D environments. The advantages include decreased memory utilisation and faster path development in comparison to the conventional A* algorithm. But, even with the improvements, the algorithm complexity can pose an issue in extremely dynamic situations and when tackling real-time dynamic obstacles.
Greedy and Binary Search Algorithms for Collaborative Search: A multi-UAV collaborative search method based on the greedy algorithm (MUCS-GD) and the binary search algorithm (MUCS-BSAE) was proposed by Yang et al. [87]. These algorithms are designed to optimise the path planning of UAVs to minimise the time it takes to complete a mission and maximise the area covered during search operations. The MUCS-BSAE enhances path allocation by achieving a balance between task length and energy limitations. The outcomes encompass enhanced efficacy and scalability, particularly when implemented in expansive and intricate search domains. However, the binary search-based strategy can be too sophisticated for real-time use, and energy limits still hamper long-duration missions.
Distributed Real-Time Search Path Planning: A novel distributed real-time search path-planning method employing an enhanced genetic algorithm (DSA-EGA) was presented by Jibin et al. [88]. The multi-UAV search path optimisation problem is represented as a distributed constraint optimisation problem (DCOP) in this approach. The algorithm enhances the solution quality by using a point crossover operator and an anytime local search (ALS) framework, thereby mitigating the risk of becoming trapped in local optima. This method improves search efficiency and scalability for large-scale UAV applications. However, the DSA-EGA algorithm’s complexity may increase processing demands, compromising real-time performance. The method increases UAV collaboration, although it may struggle in highly dynamic situations that require constant updates.
3.3.5. Comparative Analysis and Discussion for Section 3.3
Precise multi-UAV navigation planning is essential for the effective implementation of missions in complex and dynamic environments. This section discusses techniques that specifically target the optimisation of travel trajectories, enhancement in energy efficiency, and effective management of real-time flexibility within multiple UAVs. Table 4 below provides an overview of key multi-UAV route-planning algorithms, highlighting their advantages, limitations, adaptability, optimisation capabilities, and appropriate environment for implementation.
Table 4.
Overview of the algorithms used in multi-UAV path planning.
GWO achieves reduced route costs and faster convergence in complex, threat-rich situations, but it requires higher computational costs and struggles in dynamic circumstances. It is moderately to highly adaptive in static situations but limited in dynamic ones. GA solves complex optimisation problems; however, it is computationally complex and slow in dynamic circumstances, thus rendering it relatively adaptive and ideal for cooperative reconnaissance missions. SSA + BINN demonstrates an exceptional performance in path optimisation and obstacle avoidance, especially in difficult mountainous landscapes and situations with numerous dynamic obstacles. However, it requires an advanced combination procedure and substantial processing capabilities. The enhanced A* algorithm decreases memory consumption and improves the speed of discovering paths. Although it has difficulties in tackling dynamic obstacles in real-time scenarios, it offers a moderate level of adaptability and optimisation, especially in search and rescue missions conducted in 3D environments. MSFOA is known for its exceptional convergence speed and precise collision detection capabilities. As a result, it is suitable for complex environments and scenarios involving multi-UAVs, though it requires significant processing resources to operate effectively. GB-SMO exhibits a superior computing efficiency and performs well in high-density obstacle situations. However, it faces difficulties in dealing with dynamic obstacles and lacks real-time adaptability. MAXQ + SA offers accelerated convergence and exceptional control over dynamic obstacles but requires substantial processing resources, particularly in expansive and dynamic environments. DE + MMACO improves the convergence speed and strength in complicated environments but requires more processing power, making it suitable for dynamic, complex applications. GA and PSO offer a superior global optimisation and reduced flying distance. However, their performance becomes challenging in dynamic conditions. These algorithms are particularly suitable for forest monitoring and time-constrained missions due to their adaptiveness and great optimisation potential. Every algorithm is designed to address specific issues in multi-UAV operations, providing advantages that are well-suited to the requirements of extensive, complex, and dynamic environments.
In addition, although remarkable progress has been achieved in the development of algorithms for multi-UAV route planning, several of these approaches encounter difficulties regarding real-time execution, scalability, and dynamic obstacle avoidance. Further studies should focus on the refinement of these algorithms to optimise computational efficiency, minimise complexity, and increase adaptability in dynamically changing environments. This will ensure the implementation of more resilient, effective, and expandable methodologies for multi-UAV operations in different circumstances.
4. Obstacle Detection and Avoidance Methods Used in UAV Path Planning
The existing literature addresses the challenges of identifying and avoiding obstacles in UAVs. Due to the dynamic nature of UAV structures, there has been an increasing tendency in this industry towards the use of algorithms that can quickly approach convergence. Various control algorithms have been developed and proposed to solve the obstacle avoidance challenge encountered by UAV structural systems. The creation of obstacle avoidance control algorithms involves the utilisation of a combination of rule-based and optimisation-based control methods [89], using sensor-based frameworks being an initial starting point. Figure 4 demonstrates the progression from sensor input, which passes through obstacle detection and avoidance methods, to the ultimate output in terms of route planning, obstacle avoidance, and coordination across multiple UAVs.
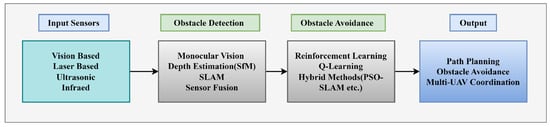
Figure 4.
Overview of the framework for the UAV obstacle detection and avoidance process.
4.1. Sensor-Based Obstacle Detection
Obstacle detection and avoidance systems mainly depend on sensors, which can be categorised into two types: vision-based sensors and laser-based sensors. Vision-based sensors are the predominant type of sensors employed in obstacle detection and avoidance systems. The integration of detection and avoidance systems with UAVs has significantly improved. The selection of the sensor to be integrated into the UAV, despite their varied functionalities, has a substantial influence on the overall design. Each approach has its own advantages and disadvantages that need to be considered [90]. An important and difficult problem in the field of UAVs is the dependence of obstacle detection algorithms and route planning on the characteristics and spatial distribution of obstacles.
4.2. Vision-Based Obstacle Detection and Depth Estimation
Vision-based systems have become an essential alternative for conventional sensors in UAVs for obstacle identification and depth estimates due to their limitations. Many researchers working in the field today use monocular images as inputs for the autonomous navigation of UAVs. However, monocular vision lacks the ability to rapidly obtain depth perception information. To address this limitation, multiple systems for autonomous navigation of UAVs using a single camera have been developed. Starting with a single camera recording, the trajectory of the UAV utilised to recreate the scenarios using structure from motion (SfM) approaches. A supervised depth map was constructed from a short sequence of consecutive photographs to provide waypoints for the navigation system [91]. Subsequently, this map was utilised to generate waypoints for the navigation system.
The paper presented a method for estimating depth directly, which enables the generation of high-resolution depth maps in real time and facilitates navigation in complex environments [92]. The SfM-based obstacle avoidance system was unable to recognise and avoid dynamic obstacles that change during mapping or between mapping cycles. Moreover, the frame cycle required the use of memory to store and compare consecutive images to obtain depth information. Another article presents a quadrotor monocular camera obstacle detection and avoidance system [93]. A short collection of pictures is used to construct dense depth maps as the quadrotor hovers to generate collision-free waypoints. The method works in tiny spaces like doorways and between obstacles in the real world. This approach is suitable for lightweight aerial vehicles as it can avoid obstacles in real time with minimum computational resources. Although depth map generation requires external processing and dynamic obstacle-rich environments limit its scalability for increasingly complex scenarios.
Because of the lack of direct depth information, most research on obstacle avoidance using monocular vision has focused on developing accurate methods for assessing depth. The predominant methodologies employed are optical flow-based methods and SLAM-based methods. A quadrotor UAV vision-based navigation system with real-time obstacle avoidance and path planning was presented in the paper in [94]. Offline map-based path planning using the RRT* algorithm and real-time optical flow obstacle detection on a single-board computer are used. Outdoor validation proves its obstacle-crossing effectiveness. The real-time obstacle detection method is useful for lightweight UAVs with low computing power. The technique can be inappropriate due to dynamic obstacles and optical flow in complex, multi-obstacle environments.
4.3. SLAM and Hybrid Approaches
As an alternative, the development of extremely precise and comprehensive metric maps has been recommended using SLAM-based approaches and an improved SLAM algorithm. The procedure used low-cost ultrasonic and infrared range finders to provide more environmental information previously to assist the UAV navigate and avoid obstacles [95]. The paper proposed a hybrid PSO-Visual-SLAM path planning method for multiple UAVs [96]. The approach combines monocular vision to construct an incremental environment map and PSO to optimise UAV trajectories. Energy consumption, flight danger, and operation completion time are considered using a dynamic fitness function (DFF). It optimises pathways in complex situations while avoiding collisions though Visual-SLAM may struggle in low-visibility or low-feature situations, affecting its accuracy and real-time performance. Another study analysed UAV navigation in GNSS-denied scenarios for indoor post-disaster search and rescue operations [97]. The RGB-D sensing and ultrasonic range technology improves mapping and navigation in multi-story buildings. This approach produces precise 3D maps and improves obstacle detection. The use of simulations for validation and the possibility of difficulties during real-world deployment because of environmental conditions and sensor limitations are the main drawbacks.
4.4. Machine Learning and Deep Learning for Obstacle Avoidance
Deep reinforcement learning with the soft actor-critic (SAC) method was proposed for UAV obstacle avoidance in continuous motion space [98]. To increase training stability and convergence speed, the model uses variational autoencoder (VAE) and SAC. This method showed useful obstacle avoidance in simulations, even in redesigned environments. This method is advantageous because it can adapt to new situations without retraining, displaying excellent adaptability. However, the modelling environments may limit its usefulness in real-world applications with uncertain environmental variables.
To solve this issue, deep learning-based approaches for increasing real-time performance in a difficult unexplored region have been suggested. An innovative duelling double deep Q-network (D3QN) method for noncooperative multi-UAV path planning was presented in this study [99]. The system enhances the efficiency of data collecting by preventing collisions, even in the absence of prior knowledge about the surroundings or the intents of other UAVs. This method is versatile and may be applied to different sorts of missions, leading to effective real-time navigation. The primary benefits encompass exceptional flexibility and efficacy, yet the technique may encounter difficulties in densely populated areas with an extensive number of UAVs.
Another research paper suggests using reinforcement learning, specifically Q-learning and SARSA algorithms, for UAV path planning and deep Q-learning for obstacle avoidance [100]. The study optimised the UAV path in 3D surroundings for aquaculture cage recognition while assuring safe navigation around obstacles. The system handles challenging circumstances and improves path planning with deep Q-learning. This strategy improves adaptability to dynamic situations and learns optimal pathways through reinforcement learning. However, the computational complexity of deep Q-learning can slow down training, and the memory and processing requirements make real-time adaption difficult.
Another Q-learning method for UAV path planning that avoids static and dynamic obstacles was presented by Amala et al. [101]. The UAV path length is optimised by the algorithm’s shortest distance prioritisation policy. In comparison with A*, Dijkstra, and SARSA, this method performs better. However, changing obstacles increase complexity, making real-time applications difficult. The method works well in static situations but can have difficulty with real-time adaption in dynamic ones.
Seungho et al. presented a CNN-based UAV vision-based trail following and obstacle avoidance method [102]. The UAV follows a route and avoids obstacles using trail navigation, disturbance recovery, and optical flow-based obstacle avoidance. The simulations and real-world experiments prove the method succeeds. This method is ideal for lightweight UAVs as it can conduct real-time navigation with low processing requirements. Visual data may limit its effectiveness in low-visibility or difficult environments.
4.5. Multi-Sensor Fusion and Real-Time Adaptability
To improve performance with a low computing capacity, the memory-based wall-following and artificial potential field (MWF-APF) approach to UAV path planning, which integrates wall-following methods with APFs, was presented in [103]. Incorporating past trajectory data into this hybrid approach improves situational awareness, which, in turn, assists in preventing repetitive path difficulties and makes better decisions. This approach can avoid obstacles in complex surroundings and has low computing requirements, which makes it suitable for UAVs with limited processing capacities. Because it uses pre-calculated pathways and historical data, the approach may struggle with real-time adaptability in extremely dynamic contexts. To overcome this, Faying et al. presented a comprehensive obstacle avoidance approach that combines data from several sensors, such as ultrasonic, infrared, and laser sensors, to improve the navigation of UAVs [104]. The Kalman filtering method and multi-sensor data fusion increase obstacle identification and decision-making, making UAVs more dependable in complex and dynamic environments. This method improves obstacle identification and situational awareness. However, the complexity of the multi-sensor fusion procedure can amplify computational requirements and decrease real-time performance in exceedingly dynamic environments.
4.6. Dynamic Obstacle Avoidance and Trajectory Planning
An article contained a comprehensive analysis of recent research studies that specifically examine the ability of UAVs to navigate around moving objects [105]. The article described the essential structure for UAVs to manoeuvre around moving obstacles. It separates this structure into three primary elements: environmental sensing, trajectory forecasting, and trajectory planning. This paper evaluated and summarised the differences between different algorithms designed to assist UAVs in avoiding dynamic obstacles. Future developments in UAV obstacle avoidance are expected to focus on the following subjects: Improve drone obstacle avoidance success rates, especially in dynamic environments where a universal solution is lacking; Second, evaluate the connection between avoiding obstacles and reaching the destination via the trajectory; Following obstacle avoidance manoeuvres, UAVs should try to adopt a safe approach to the ultimate destination or intended path.
Several approaches have been used in comparable situations. An avoidance strategy has been employed that begins by devising methods to avoid obstacles from the initial pre-set places when the vehicle senses something obstructing its path and continues until the obstruction is avoided [106]. In this research, ellipsoid geometry is employed as a confined zone containing the obstacle, and the search for an avoidance path is based on this geometry to identify an avoidance path. A limited ellipsoid zone is produced after considering the geometry information of the detected obstruction, and this ellipsoid zone serves as the foundation for computing alternate paths to avoid the obstacle.
To improve object detection in outdoor monitoring tasks, especially for search and rescue missions, the authors provided a UAV framework that blends RGB and thermal data [107]. The framework utilises a partially observable Markov decision process (POMDP) to make decisions in the presence of uncertainty. This enables the UAV to independently plan its movement even when encountering inaccurate sensor data. Augmented belief trees (ABTs) are used for real-time path planning, while CNNs are used for identifying objects. The addition of RGB and thermal data improves the precision of detection, particularly in situations with limited vision. The POMDP framework facilitates autonomous navigation in unpredictable circumstances, which was demonstrated by real flight experiments. However, the POMDP solvers’ computational complexity can restrict their real-time performance in highly dynamic environments. Additionally, depending on the pre-trained models for object detection can result in false positives in congested environments.
Furthermore, it was proposed to use variations in the size area of the obstacles to predict depths [108]. An alternative suggested approach was to utilise a feature point detector called speeded up robust features (SURFs) for the rapid identification of obstacles [109]. Additionally, a suggestion was made to merge the boundary of obstacles obtained from the multi-scale oriented patches (MOPS) technique with the spatial coordinates of important points from the scale invariant feature transformation (SIFT) approach to present three-dimensional details about the obstacles [110]. However, a limitation of these algorithms is that they can only be applied to obstacles that have already been recorded in the system.
4.7. Challenges
A comprehensive review of the progress and difficulties in UAV obstacle avoidance systems is presented in the paper in [111]. The research explored many methodologies, such as binocular stereo vision, artificial potential fields, and sensor fusion, to improve the ability of UAVs to identify and avoid obstacles. The research highlighted the importance of combining computer vision, sensor technology, and artificial intelligence to enhance the navigation and safety of UAVs. The paper additionally addressed the constraints of the existing methods, such as challenges in complex surroundings and the issue of local minimum in potential field methods. UAV obstacle avoidance should be improved by optimising path planning approaches, according to the article. This includes using machine learning to increase real-time adaptability, developing more robust algorithms for dynamic environments, and exploring multi-UAV cooperative avoidance solutions.
4.8. Comparative Analysis and Discussion for Section 4
Obstacle detection and avoidance are important components of UAV route planning. Numerous techniques, encompassing sensor-based and algorithm-driven methodologies, have been developed to enhance UAV navigation and ensure secure operation. Table 5 below provides a summary of the main obstacle detection and avoidance approaches, emphasising their corresponding sensors, advantages, limitations, and applicability for different execution situations.
Table 5.
Comprehensive overview of various obstacle detection and avoidance methods for UAVs.
Vision-based techniques that employ single cameras and optical flow sensors provide detailed depth maps and real-time navigation. However, they rely on external processing and face challenges in adapting to changing environments, limiting their effectiveness in dynamic circumstances. Laser-based techniques offer precise measurements and improved obstacle detection, although their effectiveness in dynamic contexts is limited due to the high processing requirements, despite the potential for optimisation. CNN-based methods are efficient for real-time navigation with little processing demands but are constrained by their dependence on pre-recorded obstacles and encounter difficulties in adapting to real-time scenarios, making them preferable for static environments with moderate optimisation. Both memory-based and feature-based methods have comparable disadvantages as they perform well in quickly identifying obstacles while requiring minimal computational resources. However, they face challenges in adapting to dynamic situations, which makes them more suitable for static environments. SLAM methods that utilise monocular vision and ultrasonic or infrared sensors have exceptional performance in optimising paths in complex conditions. However, these methods may encounter difficulties in areas with poor visibility or limited features, which restricts their effectiveness in such conditions. Nevertheless, they are highly optimised for dynamic scenarios. Deep learning approaches show great versatility and efficiency in real-time navigation and the learning of optimal courses. But they encounter significant computing complexity and encounter challenges in adapting to dynamic environments in real time. Geometric approaches provide pre-calculated pathways to avoid obstacles, which work well in stationary environments but become more complicated in dynamic situations, demonstrating average optimisation. RGB-based approaches that utilise RGB-D and ultrasonic sensors provide accurate 3D maps and enhance obstacle identification. However, these methods are limited by the restrictions of the sensors, indicating that they are specifically designed for dynamic situations. Each approach is customised according to certain conditions, maintaining a balance between static and dynamic environment.
According to the literature reviewed in Section 4, approaches for detecting and avoiding obstacles using UAVs have been developed to overcome the difficulties presented by diverse and dynamic environments. An important focus has been placed on integrating several sensor types, such as vision-based and laser-based systems, to improve the accuracy and dependability of obstacle detection. Vision-based systems provide real-time obstacle identification using minimal computational resources, but their effectiveness is impacted by factors such as lighting conditions and surrounding complexity. On the other hand, laser-based sensor systems provide precise distance measurements but do not possess the comprehensive environmental understanding that vision systems provide. To address these constraints, hybrid methodologies that integrate vision systems with other sensor methods have demonstrated potential in offering a more inclusive strategy for avoiding obstacles. Furthermore, the integration of advanced algorithms, such as reinforcement learning and deep learning, has enhanced the ability of UAVs to adjust to dynamic circumstances, enabling them to navigate intricate scenarios with a greater efficiency. However, these methods also present challenges, such as high computational requirements and issues in adapting to real-time scenarios.
This research highlights the importance of integrating different approaches, combining the advantages of sensor-based detection, machine learning, and real-time adaptation to address the intricate problems that UAVs encounter in varied and dynamic environments. Further research should place emphasis on enhancing these integrated systems and improving algorithms to ensure the safety and efficient operation of UAVs in various scenarios.
5. Applications of UAV Path-Planning Algorithms in Remote Sensing
The adaptability and efficiency of UAVs have contributed to their increasing integration into numerous remote sensing applications. This section provides an overview of the most advanced path-planning algorithms currently available and their practical implementation in the several subdomains of remote sensing. The section is structured into subsections that concentrate on distinct remote sensing sectors, such as precision agriculture, environmental monitoring, surveillance, among others. The framework for path planning in remote sensing is shown in Figure 5.
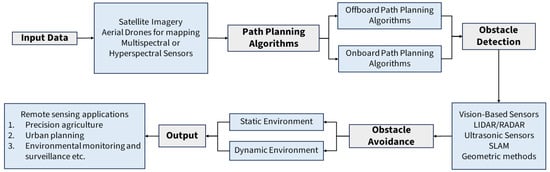
Figure 5.
Overview of the framework for UAV path planning for remote sensing applications.
5.1. Precision Agriculture
The application of UAV technology in precision agriculture provides the monitoring of crops, optimisation of resource utilisation, and improvement in farm productivity through the collection of comprehensive data in real time about the state of the soil, plant health, and irrigation requirements.
RL, specifically Q-learning, was used by Saeid et al. to optimise UAV path planning in smart farming [112]. To optimise data collection, battery consumption, and sample count, this method dynamically adjusts UAV trajectories depending on real-time environmental exploration and exploitation. In dense target scenarios, RL-enabled benchmarks outperform itinerary energy minimum for first source selection (IEMF) and tree-based itinerary design (TBID). However, the complexity of Q-learning implementation and its complexity and the need for a large number of sessions or iterations to achieve convergence on an optimal policy, especially in complex environments, are disadvantages as well. The study also used a basic 2D modelling framework that ignores altitude fluctuations and focuses on single UAV operations, limiting its relevance to larger-scale farming environments, and was only confirmed through simulations, leaving its real-world efficiency untested.
A GA-based method for optimised weeding machine operation paths in agricultural areas was presented by Zou et al. [113]. The system uses UAV remote-sensing RGB images to target weed-infested areas while avoiding weed-free areas, saving time and resources. The authors suggested a new route-encoding approach and customised a fitness function to improve the GA’s efficiency by 80.03% over uniform spraying. This method reduces herbicide use and operation time and is cost-effective. However, the outcome depends extensively on accurate UAV information, and its reliance on models and controlled tests restricts its practical usefulness. The technique concentrates on semi-autonomy and avoids dynamic terrain variables and obstacles, which could affect performance in complex situations.
Ricardo et al. proposed an approach to enhance the flight paths of UAVs with the specific purpose of monitoring and deterring birds in agricultural land [114]. This method employs PSO to minimise the distance and time of flight while maximising energy efficiency, a critical factor given the limited battery capacity of UAVs. The algorithm prioritises identifying points of interest (PoIs) with significant bird activity and creating random waypoints to avoid predictable flight sequences that birds could learn to anticipate. The technique reduced the flying distance and improved bird-repelling efficiency in simulations and real-world conditions. However, the dependence on precise PoI information and the difficulty of deploying PSO in situations that change rapidly are notable limitations, and algorithm performance on larger, more complicated areas with different climatic conditions is still unknown.
Yao et al. classified crops in high-resolution (HR) remote-sensing pictures using CNNs [115]. This research addressed the issues of complex and scattered agricultural elements, which classic classification algorithms struggle with. The authors trained an 11-layer CNN model using panchromatic images from China’s GF-1 high-resolution satellite and optimised variables to obtain a 99.66% classification accuracy. CNNs improve classification accuracy and handle the translation, magnification, and tilting image distortions, based on the study, though this method’s dependence on big labelled datasets and deep learning model computations may limit its effectiveness.
5.2. Urban Planning and LiDAR Scanning
The field of urban planning has progressively embraced UAVs for operations such as aerial surveys and LiDAR scanning. These missions provide an efficient way to obtain high-resolution data to map urban areas, infrastructure, and the layout of land. For instance, researchers presented a method for optimizing aerial laser scanning (ALS) missions in urban environments using a GA and dual parallel computation, enhancing efficiency in dense metropolitan areas [116]. The optimal flight path captured 16% more vertical data than the least optimal one and optimises flight paths to capture critical vertical surfaces and also scales well to big datasets. Real-world flying tests confirmed the algorithms feasibility. However, the dual parallel computing system requires advanced hardware and software due to its complexity and high computational requirements. It also uses pre-defined grid structures that can restrict adaptability in inconsistent urban structures. The method performed well in controlled circumstances, but its efficiency in complex and dynamic cities contexts is undetermined.
In wireless sensor networks (WSNs), Gupta et al. used the non-dominated sorting genetic algorithm II to optimise UAV pathways [117]. The proposed approach maximises information gain while minimising energy, operational time, and travel distance. The algorithm uses a new fitness function and depth-first search (DFS) and NSGA-II to discover the best flying grid sequence for sensor node data gathering. The technique outperforms a GA-based scheme in fitness value and efficiency and can locate optimal pathways in complicated scenarios and combine multiple objectives. However, the method’s dependence on high computational power and the requirement for precise grid-based modelling are possible constraints, and also, this approach highlights static environments, which limit its application in dynamic or unpredictable situations.
Another article presented by Wang et al. proposed an improved ACO algorithm that improves path planning for complex static circumstances, and this modification addresses the classic ACO algorithm’s flaws, including single assessment criterion and low path quality [118]. Fuzzy mathematics and the analytic hierarchy process (AHP) are used to create a fuzzy planner that evaluates environmental aspects like land usage, geological dangers, and slopes. Additionally, probability choosing and pheromone-modified equations were improved and a corner system mechanism was added, which smooths paths further. The simulations demonstrate that the enhanced ACO algorithm improves path planning and efficiency, leading to smoother paths with less impact on the environment. However, the algorithm’s reliance on pre-set environmental variables and the increased ACO algorithm complexity limit the uses in dynamic or real-time situations.
5.3. Environmental Monitoring and Surveillance
UAVs are becoming more important in environmental monitoring and surveillance for a variety of reasons, including data collecting, object detection, and making decisions in real time, due to their adaptability and efficiency in visiting both accessible and remote regions. In addition to these features, Yang et al. presented the combination of GA and ACO to optimise UAV flight paths in WSNs [119]. This method combines the consumption of energy, travelling time, sensor value, and environmental threats to maximise UAV operational efficiency. The authors used bioinspired algorithms to divide the sensor field into small unit areas, determine optimal sensing spots, and identify the best flight pathways. UAV flexibility is improved by a dynamic updating method for sensing information (VSI) depending on the detected events. This method performs well in simulations, but its computational complexity makes real-time use challenging, and the dependence on pre-defined visualisations can restrict its utility.
An article introduced a geosynchronous synthetic aperture radar (GEO-SAR)-based UAV path planning approach [120]. The method optimises UAV pathways for bistatic SAR imaging, when the UAV passively collects radar echoes from a GEO satellite. The suggested method balances the flight route length and imaging resolution using a constrained adaptive multi-objective differential evolution (CA-MODE) algorithm. This technique generates many optimal pathways with variable navigation safety and imaging quality trade-offs, providing flexibility for various mission objectives. However, its complexity and dependence on predetermined terrain models may restrict its real-time application, and the high computing requirement of the CA-MODE algorithm may also be a negative feature in resource-constrained contexts.
An improved method for collecting data from UAVs in wide-area WSNs was introduced in the paper in [121]. This technique optimises UAV destinations using PSO and cooperative relay techniques to reduce energy consumption, BER, and trip duration. Instead of collecting data only from cluster heads (CHs), this technology lets UAVs to freely select waypoints for more flexible and efficient data collection. Network lifetime, communication quality, and energy efficiency are improved significantly compared to previous methods. This approach decreases BER to improve network life and increase communication quality. Nevertheless, its dependence on high computational power and the complexity of using the PSO algorithm in real-time situations are potential limitations as is its use of static network systems that may limit its use in larger-scale or fast-changing scenarios.
Another unique method by Zijian et al. improved the DE algorithm with autonomous strategy selection differential evolution (ASS-DE), enhancing algorithm decision-making with reinforcement learning [122]. ASS-DE uses previous collected knowledge to let population members autonomously choose the best mutation techniques during optimisation. Complex global optimisation issues, like remote-sensing image denoising, benefit from the algorithm’s balance between exploration and exploitation in the search area. Its capacity to learn from prior events and adaptively adopt tactics improves convergence and the optimisation results. The algorithm processing requirements and DE reinforcement learning complexity may make it unsuitable for real-time applications, and it needs additional validation in real-world circumstances.
The paper by Ramesh et al. described a way to use UAV images to find, outline, and count tree crowns [123]. Using the extreme learning machine (ELM) algorithm, the authors classified tree crowns in high-resolution RGB images. Combining spectral information with spatial segmentation improves tree crown detection accuracy compared to older methods. The paper compared ELM to K-means clustering and found that ELM is more accurate and efficient. The proposed approach works well in complicated agricultural circumstances and handles low-spectral resolution photos. However, the ELM algorithm complexity and high-quality UAV imagery restrict its usefulness in less regulated areas.
To enhance UAV autonomy and remote sensing, an article examined CNN object identification methods [124]. CNNs and their use in UAV-based object identification emphasise the difficulties of integrating high-performance systems for detection into small UAVs with limited processing capabilities. The article compared on-board GPU processing for real-time detection with cloud-based processing, both with advantages and disadvantages. Off-board processing provides dynamic computational resources but has delay and network dependability difficulties, while on-board processing is independent from external connectivity but limited by power and computational capabilities. Although integrating these advanced detection algorithms is challenging, the research highlights their importance in increasing UAV autonomy and remote sensing.
A new approach using federated learning (FL) and RL improved UAV swarm operations in remote-sensing operations [125]. UAVs operating in unreliable networks must learn from their local data without exchanging raw data; therefore, FL is used. The system uses RL to allow UAVs to autonomously detect gas, avoid collisions, and optimise paths in dynamic situations. The federated reinforcement learning (FRL) system surpasses centralised RL in communication efficiency and learning performance, according to the research. This method improves UAV swarm intelligence (SI) and is robust in demanding network conditions. However, its dependence on models and the complexity of applying FRL in real-world situations are potential limitations.
A study analysed fuzzy logic for real-time UAV motion planning in uncertain and dynamic situations [126]. For effective navigation, the fuzzy inference system (FIS) evaluates real-time obstacle and target data to estimate the UAV’s heading angle and speed. Monte Carlo simulations show that the fuzzy logic controller (FLC) achieves near-optimal routes with a 3% failure probability, compared to 18% for standard APF approaches. This approach is suitable for real-time applications because of its adaptability to complicated contexts and uncertainty handling. However, the algorithm success depends on sensor data quality and computing efficiency, which may be limited in highly dynamic circumstances.
5.4. Marine and Dynamic Environments
The complexity of marine and dynamic environments poses severe challenges for UAV operations, which require advanced methods for task distribution and route planning. Ming et al. improved the work allocation and planning of routes for multiple UAVs in difficult marine environments [127]. The approach improves PSO by adding GA features, including partial matching crossover and secondary transposition mutation, to improve the solution quality and integration time. The system addresses dynamic work allocation and route planning in areas with sea impediments and restricted connectivity. The suggested method outperforms the standard PSO, simulated annealing (SA), and ACO in task assigning efficiency and UAV navigation path optimisation. This method improves efficiency, adaptability, and solution speed in difficult circumstances. However, the specified ecological simulations and real-time computational power may limit performance.
For UAV operations in dynamic agricultural situations, RRT and DRL were combined in a new adaptive path-planning method that was presented in the article in [128]. UAVs should be able to independently navigate complex and unstructured areas like olive groves to inspect bug traps while avoiding static and dynamic obstacles. The proposed approach uses RRT for initial path exploration and DRL for real-time UAV trajectory adaptation to avoid collisions. The simulations showed that the approach worked in areas with up to 10 dynamic objects and 300 cubic metres. This approach is adaptable to changing environments and can independently navigate complicated tasks. However, the approach uses a simplified simulation environment and has not been demonstrated in real-life scenarios.
A combination of frontier-based and sampling-based exploration methodologies with an improved RRT algorithm for UAV operations in unfamiliar areas was proposed by Leyang et al. [129]. Frontier and sampling-based exploration and advanced RRT planner (FSE-Planner) reduces the travelling time and optimises trajectory accuracy to improve the UAV exploration efficiency. The flight duration and trajectory quality are balanced, while the planned pathways fulfil the UAV’s dynamic limitations using adaptive weights and dynamic step sizes in the RRT algorithm. In challenging circumstances like apartments and mazes, FSE-Planner surpasses A*, RRT, and VFH+ in path length, travel time, and success rates. However, the use of predetermined voxel maps and algorithms computational cost limit its real-time application in dynamic circumstances.
Another article presented a robust control technique for low Earth orbit (LEO) satellite circular construction for remote sensing applications [130]. The method uses an APF for path planning and a fuzzy sliding mode control (FSMC) mechanism to manage satellite positions in a formation. A Lyapunov stability theory-based adaptive algorithm offers resilient performance despite system uncertainties, while fuzzy logic reduces chattering in sliding mode controllers. The results from simulations for a five-satellite system show that this strategy maintains the required configuration with minimal control effort and stability under external shocks. However, its use of predetermined formation parameters and the difficulty of real-time APF and FSMC implementation limit its application.
Liu et al. improved UAV flying formation in difficult urban situations and proposed a navigation augmented artificial potential field (NAPF) algorithm that incorporates navigation information to overcome the limitations of traditional APF, especially in GNSS-challenged environments where navigation uncertainty can be hazardous [131]. UAVs can avoid collisions more safely and efficiently while maintaining formation integrity by adaptively adjusting potential field function parameters depending on navigation data. The simulations show that the NAPF algorithm minimises collision risks more than the classic APF, making it better for real-time urban applications. However, the computational complexity and reliance on reliable navigation data impact its scalability.
Another study covered DL uses for UAV-based remote sensing in detail [132]. The authors analysed 232 papers on how DL approaches, particularly CNNs and RNNs, are applied for classification, object recognition, and semantic segmentation in environmental, urban, and agricultural environments. DL can scan high-resolution UAV footage and automate complex tasks like wildlife detection and urban mapping, according to the review. However, the research noted that vast labelled datasets, model transfer between domains, and DL algorithm computing demands are problems. Though challenging, the review highlights the potential of DL in UAV remote sensing, notably in real-time processing, reduction in data dimensionality, and learning by few shots.
5.5. Vegetation and Forestry Monitoring
Vegetation and forestry monitoring are increasingly using UAV technology to obtain data efficiently and accurately in regions that have dense vegetation, such as forested environments and agricultural fields. In their paper, Tang et al. presented an improved ACO method that can be used to plan UAV paths in dense vegetation regions, specifically in areas with a mix of trees, bushes, and crops such as those found in forested landscapes and agricultural lands [133]. The paper solved classic UAV route planning issues, like redundant data collecting and sparse ground point capture in dense vegetation. The proposed methods improve pheromone initialisation, state transfer regulations, and pheromone update schemes to include vegetation coverage in the ACO algorithm. By finding locations with a lesser vegetation covering, this optimised method enhances the ground-point data capture efficiency and terrain data correctness. Iteration speeds, route optimisation, and data collecting efficiency are improved with this strategy. The algorithm complexity and predetermined vegetation indices limit its application in changing or real-time situations.
A UAV-based approach for moss and lichen identification in Antarctica was proposed by Juan et al. integrating hyperspectral imaging (HSI) and ML [134]. The study focused on utilising UAVs to acquire high-resolution HSI data, which were analysed using a machine learning framework, particularly the extreme gradient boosting (XGBoost) model. This model effectively categorised vegetation kinds, achieving a high level of precision in correctly determining the health of moss. This method could handle complex, high-dimensional hyperspectral data and classify vegetation with up to 95% accuracy. However, the approach has several limitations, such as the use of ground control points (GCPs) to provide precise georeferencing and the substantial computational resources required for evaluating HSI data. These parameters limit its flexibility in dynamic or real-time conditions. Despite these limits, the method is particularly useful for monitoring the environment in remote regions such as Antarctica, providing an essential resource for ecological research and conservation endeavours.
5.6. Comparative Analysis and Discussion for Section 5
UAVs are increasingly important to various remote-sensing applications, from agricultural precision to ecological monitoring or urban planning. Path-planning algorithms are essential for optimising the performance of unmanned aerial vehicles (UAVs), providing effective data collecting, economical use of energy, and precise navigation in varied situations.
Table 6 presents a thorough summary of different UAV path-planning algorithms, categorised based to their accuracy, efficiency, data processing requirements, and ability to adapt to various scenarios across various kinds of remote-sensing applications. High-precision algorithms like GA, PSO, ACO, RRT, deep learning (CNN, RNN), and DE are particularly successful in mission-critical tasks, such as smart farming, urban LiDAR scanning, and dynamic environments. These algorithms have exceptional performance in optimising challenging situations, but they frequently need substantial computer resources and precise inputs. Approaches with moderate accuracy, such as APF and FL, provide a good balance between adaptability and efficiency. These methods are well-suited for applications in which making decisions in real time and dealing with limited resources are important, such as coordinating the flight of UAVs and planning their movements in unfamiliar environments. Reinforcement learning-based methods, while providing modest accuracy, have advantages for applications such as smart farming and dynamic agriculture. However, they encounter difficulties concerning computing complexity and limited real-world testing. In general, the selection of an algorithm is determined by the specific requirements of the remote-sensing application, as each method has specific advantages that are suitable for different operational circumstances.
Table 6.
Algorithms used in path planning for remote sensing applications.
The review of the current literature highlights the substantial impact of multiple path-planning algorithms on improving UAV operations in various remote-sensing applications. Major developments in machine learning methods, particularly reinforcement learning and CNNs, have demonstrated their significant potential in enhancing the efficiency of UAV trajectories, enhancing the precision of data gathering, and facilitating more flexible and responsive reactions to environmental changes. Despite these improvements, there are still notable deficiencies, especially in the practical implementation of these algorithms in highly dynamic and unexpected situations. The complex structure and high computational requirements of these methods generally limit their ability to be expanded and their usefulness in practical situations, emphasising the necessity for further research to develop more robust, efficient, and adaptable solutions.
6. Conclusions
This paper analysed the numerous algorithms used in UAS path planning and obstacle detection and avoidance, with a particular focus on their use in remote sensing. Global and local path-planning algorithms demonstrate different levels of efficacy depending on the operational setting, with techniques such as A*, GA, and PSO displaying significant optimisation potential in static and regulated situations. However, their effectiveness decreases in extremely dynamic situations, where adaptive methodologies such as RL and NN show their superior adaptability and the ability to make decisions in real time.
In multi-UAV operations, the procedure of coordinating multiple agents has substantial computational difficulties, especially in dynamic and hazardous conditions. Algorithms such as GWO and DE exhibit potential in dealing with these complexities but require additional improvement to be suitable for real-time applications.
The integration of vision-based, laser-based, and deep learning algorithms has greatly improved obstacle identification and avoidance methods, providing high accuracy and real-time processing capabilities. However, these systems frequently encounter difficulties in adjusting to swiftly evolving surroundings, highlighting the necessity for hybrid approaches that integrate several sensing and processing techniques.
The selection of an algorithm in remote-sensing applications is mostly influenced by the operational criteria, including precision, data processing requirements, and adaptability to the environment. Although advanced techniques such as deep learning and DE offer high efficiency in complex environments, they require substantial computer resources, which restricts their real-time applicability in situations with limited resources.
The review highlights several important areas for future research. These include the need for more advanced and adaptable algorithms for multi-UAV systems, improved obstacle detection techniques to effectively handle moving obstacles, and the development of innovative methods to optimise UAS operations in real-time remote-sensing tasks. By tackling these obstacles, improvements in UAS technology can greatly enhance its efficiency in a wide range of applications.
Author Contributions
Conceptualisation, D.D., F.V., J.S., A.F.H. and F.G.; methodology, D.D., J.S., F.V. and F.G.; validation, D.D., F.V. and F.G.; Literature investigation, D.D., J.S. and F.V.; writing—original draft preparation, D.D.; writing—review and editing, J.S., F.V. and F.G.; supervision, F.V. and F.G.; project administration, F.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by the Queensland University of Technology (QUT) through the HDR scholarship and the QUT Centre for Robotics through a Top-up scholarship. Additionally, this research was also funded by the Australian Research Council (ARC) SRIEAS Grant SR200100005 Securing Antarctica’s Environmental Future.
Data Availability Statement
Not applicable.
Acknowledgments
The authors acknowledge the continued support from the Queensland University of Technology (QUT) through the QUT Centre for Robotics (QCR) and School of Electrical Engineering and Robotics. The authors also extend their gratitude to Securing Antarctica’s Environmental Future (SAEF), QUT, and the School of Aerospace Engineering, Universiti Sains Malaysia (USM) for their invaluable support.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Li, J.; Xiong, Y.; She, J. UAV Path Planning for Target Coverage Task in Dynamic Environment. IEEE Internet Things J. 2023, 10, 17734–17745. [Google Scholar] [CrossRef]
- Ahmed, M.D.F.; Mohanta, J.C.; Sanyal, A.; Yadav, P.S. Path Planning of Unmanned Aerial Systems for Visual Inspection of Power Transmission Lines and Towers. IETE J. Res. 2023, 70, 3259–3279. [Google Scholar] [CrossRef]
- Zhao, W.; Chu, H.; Zhang, M.; Sun, T.; Guo, L. Flocking Control of Fixed-Wing UAVs with Cooperative Obstacle Avoidance Capability. IEEE Access 2019, 7, 17798–17808. [Google Scholar] [CrossRef]
- Yu, Y.; Tingting, W.; Long, C.; Weiwei, Z. Stereo vision based obstacle avoidance strategy for quadcopter UAV. In IEEE Industrial Electronics (IE) Chapter, Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 490–494. [Google Scholar] [CrossRef]
- Meng, Q.; Qu, Q.; Chen, K.; Yi, T. Multi-UAV Path Planning Based on Cooperative Co-Evolutionary Algorithms with Adaptive Decision Variable Selection. Drones 2024, 8, 435. [Google Scholar] [CrossRef]
- Debnath, D.; Hawary, A.F.; Ramdan, M.I.; Alvarez, F.V.; Gonzalez, F. QuickNav: An Effective Collision Avoidance and Path-Planning Algorithm for UAS. Drones 2023, 7, 678. [Google Scholar] [CrossRef]
- Vashisth, A.; Batth, R.S.; Ward, R. Existing Path Planning Techniques in Unmanned Aerial Vehicles (UAVs): A Systematic Review. In Proceedings of the 2021 International Conference on Computational Intelligence and Knowledge Economy (ICCIKE), Dubai, United Arab Emirates, 17–18 March 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 366–372. [Google Scholar] [CrossRef]
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A detailed survey and future directions of unmanned aerial vehicles (UAVs) with potential applications. Aerospace 2021, 8, 363. [Google Scholar] [CrossRef]
- Saadi, A.A.; Soukane, A.; Meraihi, Y.; Gabis, A.B.; Mirjalili, S.; Ramdane-Cherif, A. UAV Path Planning Using Optimization Approaches: A Survey. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Zhao, Y.J.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl.-Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Dechter, R.; Pearl, J. Generalized Best-First Search Strategies and the Optimality of A*. J. ACM 1985, 32, 505–536. [Google Scholar] [CrossRef]
- Gobb, H.G.; Grefenstette, J.J. Genetic Algorithms for Tracking Changing Environments. In Proceedings of the 5th International Conference on Genetic Algorithms, Urbana, IL, USA, 1 June 1993; Morgan Kaufmann Publishers Inc.: Burlington, MA, USA, 1993; pp. 523–530. [Google Scholar]
- Eberhart, R.; Kennedy, J. A New Optimizer Using Particle Swarm Theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Colorni, A.; Dorigo, M.; Maniezzo, V. Distributed Optimization by Ant Colonies. In Proceedings of the First European Conference on Artificial Life, Paris, France, 11–13 December 1991; pp. 134–142. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Mandloi, D.; Arya, R.; Verma, A.K. Unmanned aerial vehicle path planning based on A* algorithm and its variants in 3d environment. Int. J. Syst. Assur. Eng. Manag. 2021, 12, 990–1000. [Google Scholar] [CrossRef]
- Bai, X.; Jiang, H.; Cui, J.; Lu, K.; Chen, P.; Zhang, M. UAV Path Planning Based on Improved A* and DWA Algorithms. Int. J. Aerosp. Eng. 2021, 2021, 4511252. [Google Scholar] [CrossRef]
- Chen, J.; Li, M.; Yuan, Z.; Gu, Q. An Improved A* Algorithm for UAV Path Planning Problems. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; IEEE Press: Piscataway, NJ, USA, 2020; pp. 958–962. [Google Scholar] [CrossRef]
- Sun, S.; Wang, H.; Xu, Y.; Wang, T.; Liu, R.; Chen, W. A Fusion Approach for UAV Onboard Flight Trajectory Management and Decision Making Based on the Combination of Enhanced A* Algorithm and Quadratic Programming. Drones 2024, 8, 254. [Google Scholar] [CrossRef]
- Qi, D.; Zhang, Z.; Zhang, Q. Path Planning of Multirotor UAV Based on the Improved Ant Colony Algorithm. J. Robot. 2022, 2022, 2168964. [Google Scholar] [CrossRef]
- Li, G.; Li, Y. UAV path planning based on improved ant colony algorithm. In Proceedings of the Second International Conference on Algorithms, Microchips, and Network Applications (AMNA 2023), Zhengzhou, China, 13–15 January 2023; pp. 59–63. [Google Scholar] [CrossRef]
- Huan, L.; Ning, Z.; Qiang, L. UAV Path Planning Based on an Improved Ant Colony Algorithm. In Proceedings of the 2021 4th International Conference on Intelligent Autonomous Systems (ICoIAS), Wuhan, China, 14–16 May 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 357–360. [Google Scholar] [CrossRef]
- Song, H.; Jia, M.; Lian, Y.; Fan, Y.; Liang, K. UAV Path Planning Based on an Improved Ant Colony Algorithm. J. Electron. Res. Appl. 2022, 6, 10–25. Available online: http://ojs.bbwpublisher.com/index.php/JERA (accessed on 11 July 2024). [CrossRef]
- Zhang, M.; Han, Y.; Chen, S.; Liu, M.; He, Z.; Pan, N. A Multi-Strategy Improved Differential Evolution algorithm for UAV 3D trajectory planning in complex mountainous environments. Eng. Appl. Artif. Intell. 2023, 125, 106672. [Google Scholar] [CrossRef]
- Huang, C.; Zhou, X.; Ran, X.; Wang, J.; Chen, H.; Deng, W. Adaptive cylinder vector particle swarm optimization with differential evolution for UAV path planning. Eng. Appl. Artif. Intell. 2023, 121, 105942. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, N.; Wang, X.; Li, M. A hybrid algorithm based on grey wolf optimizer and differential evolution for UAV path planning. Expert Syst. Appl. 2022, 215, 119327. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, X. UAV Path Planning Based on Hybrid Differential Evolution with Fireworks Algorithm. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer Science and Business Media: Berlin, Germany, 2022; pp. 354–364. [Google Scholar] [CrossRef]
- Yu, X.; Li, C.; Yen, G.G. A knee-guided differential evolution algorithm for unmanned aerial vehicle path planning in disaster management. Appl. Soft Comput. 2021, 98, 106857. [Google Scholar] [CrossRef]
- Nayeem, G.M.; Fan, M.; Akhter, Y. A Time-Varying Adaptive Inertia Weight based Modified PSO Algorithm for UAV Path Planning. In Proceedings of the 2021 2nd International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), Dhaka, Bangladesh, 5–7 January 2021; pp. 573–576. [Google Scholar] [CrossRef]
- Phung, M.D.; Ha, Q.P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]
- Chu, H.; Yi, J.; Yang, F. Chaos Particle Swarm Optimization Enhancement Algorithm for UAV Safe Path Planning. Appl. Sci. 2022, 12, 8977. [Google Scholar] [CrossRef]
- Huang, C. A Novel Three-Dimensional Path Planning Method for Fixed-Wing UAV Using Improved Particle Swarm Optimization Algorithm. Int. J. Aerosp. Eng. 2021, 2021, 7667173. [Google Scholar] [CrossRef]
- Yu, Z.; Si, Z.; Li, X.; Wang, D.; Song, H. A Novel Hybrid Particle Swarm Optimization Algorithm for Path Planning of UAVs. IEEE Internet Things J. 2022, 9, 22547–22558. [Google Scholar] [CrossRef]
- Sonmez, A.; Kocyigit, E.; Kugu, E. Optimal path planning for UAVs using Genetic Algorithm. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 50–55. [Google Scholar] [CrossRef]
- Majeed, A.; Hwang, S.O. A multi-objective coverage path planning algorithm for uavs to cover spatially distributed regions in urban environments. Aerospace 2021, 8, 343. [Google Scholar] [CrossRef]
- Pehlivanoglu, Y.V.; Pehlivanoglu, P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems. Appl. Soft Comput. 2021, 112, 107796. [Google Scholar] [CrossRef]
- Shivgan, R.; Dong, Z. Energy-Efficient Drone Coverage Path Planning using Genetic Algorithm. In Proceedings of the 2020 IEEE 21st International Conference on High Performance Switching and Routing (HPSR), Newark, NJ, USA, 11–14 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Da Silva Arantes, J.; Da Silva Arantes, M.; Toledo, C.F.M.; Júnior, O.T.; Williams, B.C. Heuristic and Genetic Algorithm Approaches for UAV Path Planning under Critical Situation. Int. J. Artif. Intell. Tools 2017, 26, 1760008. [Google Scholar] [CrossRef]
- Galvez, R.L.; Dadios, E.P.; Bandala, A.A. Path Planning for Quadrotor UAV Using Genetic Algorithm. In Proceedings of the 2014 International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Palawan, Philippines, 12–16 November 2014; IEEE: Piscataway, NJ, USA, 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Noreen, I.; Khan, A.; Habib, Z. Optimal Path Planning using RRT* based Approaches: A Survey and Future Directions. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 97–107. Available online: www.ijacsa.thesai.org (accessed on 15 July 2024). [CrossRef]
- Chen, J.; Yu, J. An Improved Path Planning Algorithm for UAV Based on RRT. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 895–898. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, X.; Liu, X.; Yang, Y.; Zhang, W. FC-RRT*: An Improved Path Planning Algorithm for UAV in 3D Complex Environment. ISPRS Int. J. Geo-Inf. 2022, 11, 112. [Google Scholar] [CrossRef]
- Ren, X.; Tan, L.; Jiaqi, S.; Lian, X. Multi-target UAV path planning based on improved RRT algorithm. J. Phys. Conf. Ser. 2021, 1786, 12038. [Google Scholar] [CrossRef]
- Yang, F.; Fang, X.; Gao, F.; Zhou, X.; Li, H.; Jin, H.; Song, Y. Obstacle Avoidance Path Planning for UAV Based on Improved RRT Algorithm. Discret. Dyn. Nat. Soc. 2022, 2022, 4544499. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, K.; Lu, G.; Hu, Y.; Yuan, S. Path Planning of UAV Delivery Based on Improved APF-RRT* Algorithm. J. Phys. Conf. Ser. 2020, 1624, 042004. [Google Scholar] [CrossRef]
- Selvam, P.K.; Raja, G.; Rajagopal, V.; Dev, K.; Knorr, S. Collision-free Path Planning for UAVs using Efficient Artificial Potential Field Algorithm. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, J. The three-dimension path planning of UAV based on improved artificial potential field in dynamic environment. In Proceedings of the 2013 5th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 26–27 August 2013; Volume 2013, pp. 144–147. [Google Scholar] [CrossRef]
- Hao, G.; Lv, Q.; Huang, Z.; Zhao, H.; Chen, W. UAV Path Planning Based on Improved Artificial Potential Field Method. Aerospace 2023, 10, 562. [Google Scholar] [CrossRef]
- Chen, Y.B.; Luo, G.C.; Mei, Y.S.; Yu, J.Q.; Su, X.L. UAV path planning using artificial potential field method updated by optimal control theory. Int. J. Syst. Sci. 2016, 47, 1407–1420. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, W.; Lv, J. Uav Path Planning Based on Improved Artificial Potential Field Method. In Proceedings of the 2022 International Conference on Computer Network, Electronic and Automation (ICCNEA), Xian, China, 23–25 September 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 95–100. [Google Scholar] [CrossRef]
- Juan, V.S.; Santos, M.; Andújar, J.M. Intelligent UAV Map Generation and Discrete Path Planning for Search and Rescue Operations. Complexity 2018, 2018, 6879419. [Google Scholar] [CrossRef]
- Zhuoning, D.; Rulin, Z.; Zongji, C.; Rui, Z. Study on UAV Path Planning Approach Based on Fuzzy Virtual Force. Chin. J. Aeronaut. 2010, 23, 341–350. [Google Scholar] [CrossRef]
- Ntakolia, C.; Platanitis, K.S.; Kladis, G.P.; Skliros, C.; Zagorianos, A.D. A Genetic Algorithm enhanced with Fuzzy-Logic for multi-objective Unmanned Aircraft Vehicle path planning missions. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 114–123. [Google Scholar] [CrossRef]
- Song, Q.; Zhao, Q.; Wang, S.; Liu, Q.; Chen, X. Dynamic path planning for unmanned vehicles based on fuzzy logic and improved ant colony optimization. IEEE Access 2020, 8, 62107–62115. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, Z.; Qin, F.; Zhang, X.; Yao, H. A residual convolutional neural network based approach for real-time path planning. Knowl. Based Syst. 2022, 242, 108400. [Google Scholar] [CrossRef]
- Wai, R.-J.; Prasetia, A.S. Adaptive Neural Network Control and Optimal Path Planning of UAV Surveillance System with Energy Consumption Prediction. IEEE Access 2019, 7, 126137–126153. [Google Scholar] [CrossRef]
- Shiri, H.; Park, J.; Bennis, M. Massive Autonomous UAV Path Planning: A Neural Network Based Mean-Field Game Theoretic Approach. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Shiri, H.; Park, J.; Bennis, M. Remote UAV Online Path Planning via Neural Network-Based Opportunistic Control. IEEE Wirel. Commun. Lett. 2020, 9, 861–865. [Google Scholar] [CrossRef]
- He, L.; Aouf, N.; Song, B. Explainable Deep Reinforcement Learning for UAV autonomous path planning. Aerosp. Sci. Technol. 2021, 118, 107052. [Google Scholar] [CrossRef]
- Li, B.; Wu, Y. Path Planning for UAV Ground Target Tracking via Deep Reinforcement Learning. IEEE Access 2020, 8, 29064–29074. [Google Scholar] [CrossRef]
- Yan, C.; Xiang, X.; Wang, C. Towards Real-Time Path Planning through Deep Reinforcement Learning for a UAV in Dynamic Environments. J. Intell. Robot. Syst. 2020, 98, 297–309. [Google Scholar] [CrossRef]
- Theile, M.; Bayerlein, H.; Nai, R.; Gesbert, D.; Caccamo, M. UAV coverage path planning under varying power constraints using deep reinforcement learning. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vegas, NV, USA, 24 October 2020–24 January 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 1444–1449. [Google Scholar] [CrossRef]
- Cui, Z.; Wang, Y. UAV Path Planning Based on Multi-Layer Reinforcement Learning Technique. IEEE Access 2021, 9, 59486–59497. [Google Scholar] [CrossRef]
- Xie, R.; Meng, Z.; Wang, L.; Li, H.; Wang, K.; Wu, Z. Unmanned Aerial Vehicle Path Planning Algorithm Based on Deep Reinforcement Learning in Large-Scale and Dynamic Environments. IEEE Access 2021, 9, 24884–24900. [Google Scholar] [CrossRef]
- Gonzalez, V.; Monje, C.A.; Garrido, S.; Moreno, L.; Balaguer, C. Coverage Mission for UAVs Using Differential Evolution and Fast Marching Square Methods. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 18–29. [Google Scholar] [CrossRef]
- González, V.; Monje, C.; Moreno, L.; Balaguer, C. UAVs mission planning with flight level constraint using Fast Marching Square Method. Robot. Auton. Syst. 2017, 94, 162–171. [Google Scholar] [CrossRef]
- Lin, C.E.; Shao, P.C. Failure analysis for an unmanned aerial vehicle using safe path planning. J. Aerosp. Inf. Syst. 2020, 17, 358–369. [Google Scholar] [CrossRef]
- Zhou, X.; Gao, F.; Fang, X.; Lan, Z. Improved Bat Algorithm for UAV Path Planning in Three-Dimensional Space. IEEE Access 2021, 9, 20100–20116. [Google Scholar] [CrossRef]
- Xu, C.; Xu, M.; Yin, C. Optimized multi-UAV cooperative path planning under the complex confrontation environment. Comput. Commun. 2020, 162, 196–203. [Google Scholar] [CrossRef]
- Huang, G.; Cai, Y.; Liu, J.; Qi, Y.; Liu, X. A Novel Hybrid Discrete Grey Wolf Optimizer Algorithm for Multi-UAV Path Planning. J. Intell. Robot. Syst. 2021, 103, 1–18. [Google Scholar] [CrossRef]
- Jiaqi, S.; Li, T.; Hongtao, Z.; Xiaofeng, L.; Tianying, X. Adaptive multi-UAV path planning method based on improved gray wolf algorithm. Comput. Electr. Eng. 2022, 104, 108377. [Google Scholar] [CrossRef]
- Yanmaz, E. Joint or decoupled optimization: Multi-UAV path planning for search and rescue. Ad Hoc Netw. 2023, 138, 103018. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, Y.; Li, M.; Zhang, Z.; Cao, N.; Shang, J. Multi-UAV Path Planning Based on Fusion of Sparrow Search Algorithm and Improved Bioinspired Neural Network. IEEE Access 2021, 9, 124670–124681. [Google Scholar] [CrossRef]
- Bai, H.; Fan, T.; Niu, Y.; Cui, Z. Multi-UAV Cooperative Trajectory Planning Based on Many-Objective Evolutionary Algorithm. Complex Syst. Model. Simul. 2022, 2, 130–141. [Google Scholar] [CrossRef]
- Shi, K.; Zhang, X.; Xia, S. Multiple swarm fruit fly optimization algorithm based path planning method for multi-UAVs. Appl. Sci. 2020, 10, 2822. [Google Scholar] [CrossRef]
- Cao, Y.; Wei, W.; Bai, Y.; Qiao, H. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm. Clust. Comput. 2019, 22, 5175–5184. [Google Scholar] [CrossRef]
- Wang, Y.; Li, W.; Jiang, R. A Novel Hybrid Algorithm Based on Improved Particle Swarm Optimization Algorithm and Genetic Algorithm for Multi-UAV Path Planning with Time Windows. In Proceedings of the 2022 IEEE 5th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 16–18 December 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 1005–1009. [Google Scholar] [CrossRef]
- Asim, M.; Mashwani, W.K.; Belhaouari, S.B.; Hassan, S. A Novel Genetic Trajectory Planning Algorithm with Variable Population Size for Multi-UAV-Assisted Mobile Edge Computing System. IEEE Access 2021, 9, 125569–125579. [Google Scholar] [CrossRef]
- Yuting, C.; Dongcheng, L.; Eric, W.W.; Man, Z.; Dengfeng, M. Multi-UAV Collaborative Path Planning using Hierarchical Reinforcement Learning and Simulated Annealing. Int. J. Perform. Eng. 2022, 18, 463. [Google Scholar] [CrossRef]
- Xia, Q.; Liu, S.; Guo, M.; Wang, H.; Zhou, Q.; Zhang, X. Multi-UAV trajectory planning using gradient-based sequence minimal optimization. Robot. Auton. Syst. 2021, 137, 103728. [Google Scholar] [CrossRef]
- Ali, Z.A.; Zhangang, H.; Zhengru, D. Path planning of multiple UAVs using MMACO and DE algorithm in dynamic environment. Meas. Control. 2023, 56, 459–469. [Google Scholar] [CrossRef]
- Shafiq, M.; Ali, Z.A.; Israr, A.; Alkhammash, E.H.; Hadjouni, M.; Jussila, J.J. Convergence Analysis of Path Planning of Multi-UAVs Using Max-Min Ant Colony Optimization Approach. Sensors 2022, 22, 5395. [Google Scholar] [CrossRef] [PubMed]
- Du, Y. Multi-UAV Search and Rescue with Enhanced A* Algorithm Path Planning in 3D Environment. Int. J. Aerosp. Eng. 2023, 2023, 8614117. [Google Scholar] [CrossRef]
- Yu, Y.; Lee, S. Efficient Multi-UAV Path Planning for Collaborative Area Search Operations. Appl. Sci. 2023, 13, 8728. [Google Scholar] [CrossRef]
- Zheng, J.; Ding, M.; Sun, L.; Liu, H. Distributed Stochastic Algorithm Based on Enhanced Genetic Algorithm for Path Planning of Multi-UAV Cooperative Area Search. IEEE Trans. Intell. Transp. Syst. 2023, 24, 8290–8303. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Zhang, P.; Kong, X. Collision Avoidance in Fixed-Wing UAV Formation Flight Based on a Consensus Control Algorithm. IEEE Access 2018, 6, 43672–43682. [Google Scholar] [CrossRef]
- Bin Ramli, M.F.; Legowo, A.; Shamsudin, S.S. Object Detection Technique for Small Unmanned Aerial Vehicle. IOP Conf. Series: Mater. Sci. Eng. 2017, 260, 012040. [Google Scholar] [CrossRef]
- Alvarez, H.; Paz, L.M.; Sturm, J.; Cremers, D. Collision avoidance for quadrotors with a monocular camera. In Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2016; Volume 109, pp. 195–209. [Google Scholar] [CrossRef]
- Daftry, S.; Zeng, S.; Khan, A.; Dey, D.; Melik-Barkhudarov, N.; Bagnell, J.A.; Hebert, M. Robust Monocular Flight in Cluttered Outdoor Environments. arXiv 2016, arXiv:1604.04779. [Google Scholar]
- Jiang, S.; Jiang, C.; Jiang, W. Efficient structure from motion for large-scale UAV images: A review and a comparison of SfM tools. ISPRS J. Photogramm. Remote Sens. 2020, 167, 230–251. [Google Scholar] [CrossRef]
- Lin, H.Y.; Peng, X.Z. Autonomous Quadrotor Navigation with Vision Based Obstacle Avoidance and Path Planning. IEEE Access 2021, 9, 102450–102459. [Google Scholar] [CrossRef]
- Gageik, N.; Benz, P.; Montenegro, S. Obstacle detection and collision avoidance for a UAV with complementary low-cost sensors. IEEE Access 2015, 3, 599–609. [Google Scholar] [CrossRef]
- Mughal, U.A.; Ahmad, I.; Pawase, C.J.; Chang, K. UAVs Path Planning by Particle Swarm Optimization Based on Visual-SLAM Algorithm. In Unmanned System Technologies; Springer: Berlin/Heidelberg, Germany, 2022; pp. 169–197. [Google Scholar] [CrossRef]
- Wu, W.; Chen, B.; Liu, D. Simulation of UAV-Based Indoor Mapping for Multi-Story Building Using a RGB-D SLAM Solution. In Proceedings of the 2024 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Glasgow, UK, 20–23 May 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024. [Google Scholar] [CrossRef]
- Xue, Z.; Gonsalves, T. Vision Based Drone Obstacle Avoidance by Deep Reinforcement Learning. AI 2021, 2, 366–380. [Google Scholar] [CrossRef]
- Wang, X.; Gursoy, M.C.; Erpek, T.; Sagduyu, Y.E. Learning-Based UAV Path Planning for Data Collection with Integrated Collision Avoidance. IEEE Internet Things J. 2022, 9, 16663–16676. [Google Scholar] [CrossRef]
- Tu, G.-T.; Juang, J.-G. UAV Path Planning and Obstacle Avoidance Based on Reinforcement Learning in 3D Environments. Actuators 2023, 12, 57. [Google Scholar] [CrossRef]
- Sonny, A.; Yeduri, S.R.; Cenkeramaddi, L.R. Q-learning-based unmanned aerial vehicle path planning with dynamic obstacle avoidance. Appl. Soft Comput. 2023, 147, 110773. [Google Scholar] [CrossRef]
- Back, S.; Cho, G.; Oh, J.; Tran, X.-T.; Oh, H. Autonomous UAV Trail Navigation with Obstacle Avoidance Using Deep Neural Networks. J. Intell. Robot. Syst. 2020, 100, 1195–1211. [Google Scholar] [CrossRef]
- Wang, H.; Cao, M.; Jiang, H.; Xie, L. Feasible Computationally Efficient Path Planning for UAV Collision Avoidance. In Proceedings of the 2018 IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 576–581. [Google Scholar] [CrossRef]
- Li, F.; Xiao, J.; Huang, W.; Cai, S. Research on the Intelligent Obstacle Avoidance and Path Planning Strategy of UAV based on Multi-Sensor Fusion. In Proceedings of the 2022 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 20–21 August 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 628–632. [Google Scholar] [CrossRef]
- Wang, T.; Yang, L.; Chang, Y.; Huang, Z.; Jiang, H.; Zheng, Y. A Review of Dynamic Obstacle Avoidance for Unmanned Aerial Vehicles (UAVs). In Proceedings of the 2024 7th International Symposium on Autonomous Systems (ISAS), Chongqing, China, 7–9 May 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024. [Google Scholar] [CrossRef]
- Sasongko, R.A.; Rawikara, S.S.; Tampubolon, H.J. UAV Obstacle Avoidance Algorithm Based on Ellipsoid Geometry. J. Intell. Robot. Syst. 2017, 88, 567–581. [Google Scholar] [CrossRef]
- Sandino, J.; Caccetta, P.A.; Sanderson, C.; Maire, F.; Gonzalez, F. Reducing Object Detection Uncertainty from RGB and Thermal Data for UAV Outdoor Surveillance. In Proceedings of the IEEE Computer Society, Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; IEEE Computer Society: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Al-Kaff, A.; García, F.; Martín, D.; de la Escalera, A.; Armingol, J.M. Obstacle detection and avoidance system based on monocular camera and size expansion algorithm for UAVs. Sensors 2017, 17, 1061. [Google Scholar] [CrossRef]
- Aguilar, W.G.; Casaliglla, V.P.; Pólit, J.L. Obstacle avoidance based-visual navigation for micro aerial vehicles. Electronics 2017, 6, 10. [Google Scholar] [CrossRef]
- Lee, J.; Lee, K.; Park, S.; Im, S.; Park, J. Obstacle avoidance for small UAVs using monocular vision. Aircr. Eng. Aerosp. Technol. 2011, 83, 397–406. [Google Scholar] [CrossRef]
- Wang, H. UAV Obstacle Avoidance Technology. Sci. Technol. Eng. Chem. Environ. Prot. 2024, 1, 7. [Google Scholar] [CrossRef]
- Ardakani, S.P.; Cheshmehzangi, A. Reinforcement Learning-Enabled UAV Itinerary Planning for Remote Sensing Applications in Smart Farming. Telecom 2021, 2, 255–270. [Google Scholar] [CrossRef]
- Zou, K.; Wang, H.; Zhang, F.; Zhang, C.; Kai, D. Precision route planning method based on UAV remote sensing and genetic algorithm for weeding machine. Appl. Intell. 2023, 53, 11203–11213. [Google Scholar] [CrossRef]
- Mesquita, R.; Gaspar, P.D. A Novel Path Planning Optimization Algorithm Based on Particle Swarm Optimization for UAVs for Bird Monitoring and Repelling. Processes 2022, 10, 62. [Google Scholar] [CrossRef]
- Yao, C.; Zhang, Y.; Liu, H. Application of convolutional neural network in classification of high resolution agricultural remote sensing images. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W7, 989–992. [Google Scholar] [CrossRef]
- Vo, A.V.; Laefer, D.F.; Byrne, J. Optimizing urban LiDAR flight path planning using a genetic algorithm and a dual parallel computing framework. Remote Sens. 2021, 13, 4437. [Google Scholar] [CrossRef]
- Gupta, G.P.; Chawra, V.K.; Dewangan, S. Optimal path planning for UAV using NSGA-II based metaheuristic for sensor data gathering application in Wireless Sensor Networks. In Proceedings of the 2019 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Goa, India, 16–19 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, M.; Zhu, C.; Wang, F.; Li, T.; Zhang, X. Multi-factor of path planning based on an ant colony optimization algorithm. Ann. GIS 2020, 26, 101–112. [Google Scholar] [CrossRef]
- Yang, Q.; Yoo, S.-J.; Yang, Q.; Yoo, S.-J. Optimal UAV Path Planning: Sensing Data Acquisition Over IoT Sensor Networks Using Multi-Objective Bio-Inspired Algorithms. IEEE Access 2018, 6, 13671–13684. [Google Scholar] [CrossRef]
- Sun, Z.; Wu, J.; Yang, J.; Huang, Y.; Li, C.; Li, D. Path Planning for GEO-UAV Bistatic SAR Using Constrained Adaptive Multiobjective Differential Evolution. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6444–6457. [Google Scholar] [CrossRef]
- Ho, D.-T.; Grotli, E.I.; Sujit, P.B.; Johansen, T.A.; De Sousa, J.B. Performance evaluation of cooperative relay and Particle Swarm Optimization path planning for UAV and wireless sensor network. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1403–1408. [Google Scholar] [CrossRef]
- Cao, Z.; Jia, H.; Wang, Z.; Foh, C.H.; Tian, F. A differential evolution with autonomous strategy selection and its application in remote sensing image denoising. Expert Syst. Appl. 2024, 238, 122108. [Google Scholar] [CrossRef]
- Kestur, R.; Angural, A.; Bashir, B.; Omkar, S.N.; Anand, G.; Meenavathi, M.B. Tree Crown Detection, Delineation and Counting in UAV Remote Sensed Images: A Neural Network Based Spectral–Spatial Method. J. Indian Soc. Remote Sens. 2018, 46, 991–1004. [Google Scholar] [CrossRef]
- Aposporis, P. Object Detection Methods for Improving UAV Autonomy and Remote Sensing Applications. In Proceedings of the 2020 IEEE/ACM International Conference on Advances in Social Networks Analysis and Mining (ASONAM), Hague, The Netherlands, 7–10 December 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 845–853. [Google Scholar] [CrossRef]
- Lee, W. Federated Reinforcement Learning-Based UAV Swarm System for Aerial Remote Sensing. Wirel. Commun. Mob. Comput. 2022, 2022, 4327380. [Google Scholar] [CrossRef]
- Sabo, C.; Cohen, K. Fuzzy Logic Unmanned Air Vehicle Motion Planning. Adv. Fuzzy Syst. 2012, 2012, 989051. [Google Scholar] [CrossRef]
- Yan, M.; Yuan, H.; Xu, J.; Yu, Y.; Jin, L. Task allocation and route planning of multiple UAVs in a marine environment based on an improved particle swarm optimization algorithm. EURASIP J. Adv. Signal Process. 2021, 2021, 94. [Google Scholar] [CrossRef]
- de Castro, G.G.R.; Berger, G.S.; Cantieri, A.; Teixeira, M.; Lima, J.; Pereira, A.I.; Pinto, M.F. Adaptive Path Planning for Fusing Rapidly Exploring Random Trees and Deep Reinforcement Learning in an Agriculture Dynamic Environment UAVs. Agriculture 2023, 13, 354. [Google Scholar] [CrossRef]
- Zhao, L.; Yan, L.; Hu, X.; Yuan, J.; Liu, Z. Efficient and high path quality autonomous exploration and trajectory planning of UAV in an unknown environment. ISPRS Int. J. Geo-Inf. 2021, 10, 631. [Google Scholar] [CrossRef]
- Nair, R.R.; Behera, L.; Kumar, V.; Jamshidi, M. Multisatellite formation control for remote sensing applications using artificial potential field and adaptive fuzzy sliding mode control. IEEE Syst. J. 2015, 9, 508–518. [Google Scholar] [CrossRef]
- Liu, H.; Liu, H.H.T.; Chi, C.; Zhai, Y.; Zhan, X. Navigation information augmented artificial potential field algorithm for collision avoidance in UAV formation flight. Aerosp. Syst. 2020, 3, 229–241. [Google Scholar] [CrossRef]
- Osco, L.P.; Marcato Junior, J.; Marques Ramos, A.P.; de Castro Jorge, L.A.; Fatholahi, S.N.; de Andrade Silva, J.; Matsubara, E.T.; Pistori, H.; Gonçalves, W.N.; Li, J. A Review on deep learning in UAV remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102456. [Google Scholar] [CrossRef]
- Tang, F.; Li, K.; Xu, F.; Han, L.; Zhang, H.; Yang, Z. Optimal ant colony algorithm for UAV airborne LiDAR route planning in densely vegetated areas. J. Appl. Remote Sens. 2023, 17, 046506. [Google Scholar] [CrossRef]
- Sandino, J.; Bollard, B.; Doshi, A.; Randall, K.; Barthelemy, J.; Robinson, S.A.; Gonzalez, F. A Green Fingerprint of Antarctica: Drones, Hyperspectral Imaging, and Machine Learning for Moss and Lichen Classification. Remote Sens. 2023, 15, 5658. [Google Scholar] [CrossRef]
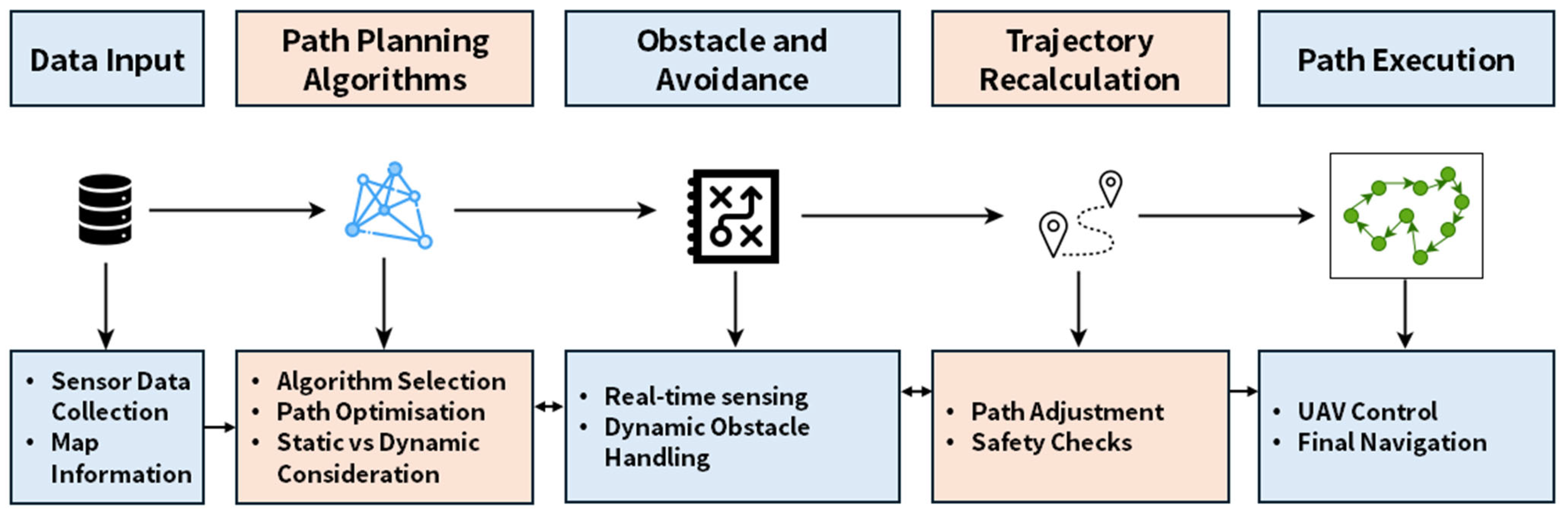
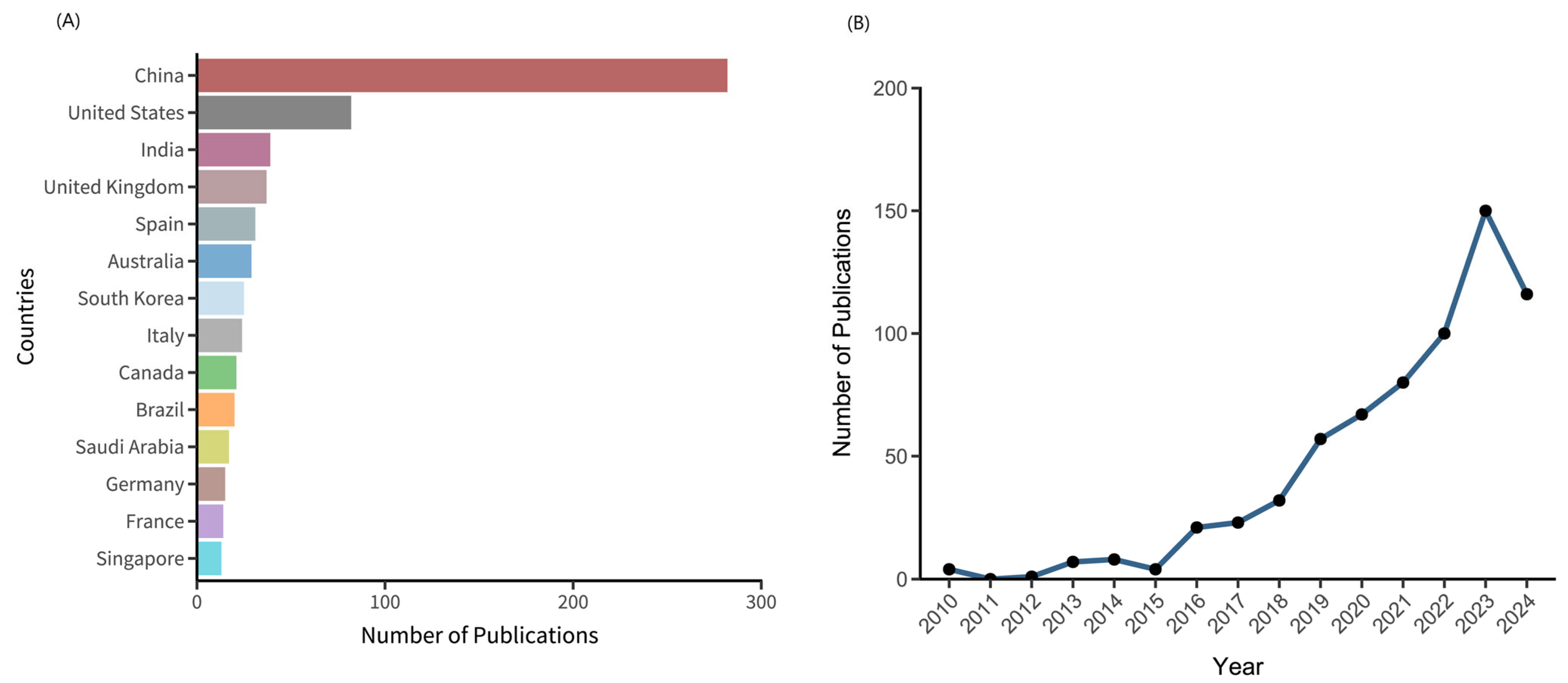

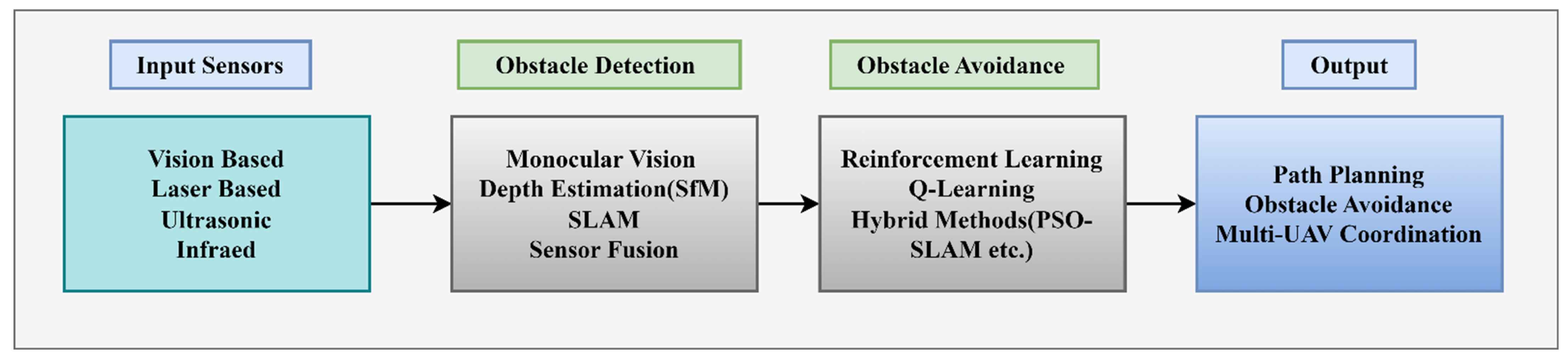
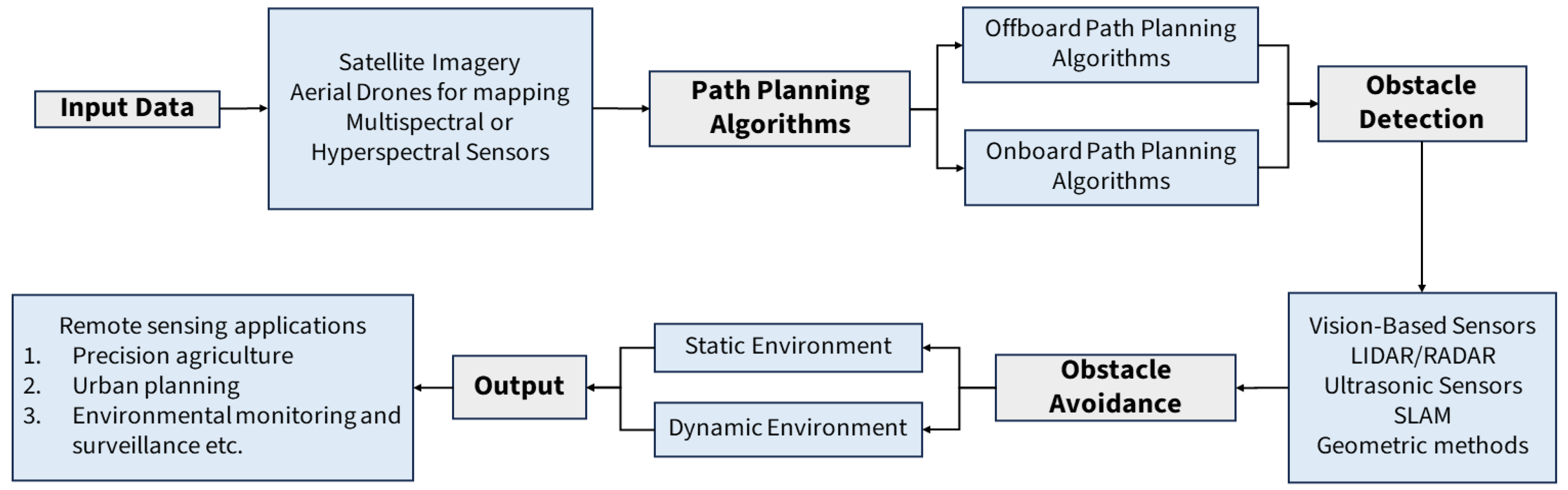
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).