1. Introduction
The demand for navigation and positioning is growing rapidly with the growth of the automotive industry, both in military and civilian applications [
1,
2,
3,
4]. Among many alternative navigation systems or sensors, such as LiDAR, visual sensors, and odometers, the inertial navigation system (INS) and the global navigation satellite system (GNSS) are the most widely employed systems [
5]. The INS is the sole navigation system that does not necessitate any additional external references [
6]. As the BeiDou global navigation satellite system (BDS-3) has been applied since June 2020 [
7], one more GNSS can be used plus the global positioning system (GPS), GLONASS, and other systems. Theoretically, more systems mean more convenient utilization and more accurate navigation solutions. Still, challenges remain and become more difficult in that, with the improvement in the infrastructure construction, more tunnels and overpasses have been built especially in megacities [
8,
9]. These constructions or buildings interfere with or block the signal of the GNSS, leading to a degenerated positioning accuracy.
The Kalman filter (KF) is the main powerful tool for information fusion in INS/GNSS applications [
9]. The complementary error features of these two systems make the KF suitable for INS/GNSS integrated navigation applications. The INS suffers from a long-term error drift that might even be without bounds, but it can supply high-precision short-term measurements; conversely, the GNSS can consistently offer positioning data with errors that fall within an acceptable range unless interference disrupts the signal. Additionally, the low output bandwidth is another limitation of the GNSS [
10].
The classical KF obtains optimal estimates of the concerned states for linear systems under the assumption that both the noise covariance of the process and the observation are Gaussian [
11]. Unfortunately, in real applications, there is little chance that the assumption about noise can hold because the covariance may expand under complex environments [
12]. For an INS/GNSS integrated system, the covariance of the process noise usually can be calibrated either by the manual of the INS or by some online/offline algorithms [
9], but the noise covariance of the GNSS (
) cannot be set to a fixed one due to the complex environment. The GNSS navigation accuracy may decrease in dense urban areas compared to open-sky environments. Although the high-precision-level INS can maintain the accuracy of navigation due to its ultra-low error drift at extremely expensive costs, most commercial and inexpensive INS systems struggle to achieve accurate navigation when the GNSS signal is interfered with or blocked [
13]. There are commonly two strategies to tackle these problems in INS/GNSS-based applications.
(1) The INS/GNSS integrated system is equipped with more hardware sensors, such as an altitude sensor, odometer [
14], LiDAR [
15], camera [
16], magnetic sensor [
17], and wheel speed sensor, for collecting various data to suppress the errors from the GNSS. The core idea is to introduce one or more actual independent measurement systems to aid the INS/GNSS. For example, Aftatah et al. proposed a fusion algorithm by employing an odometer to replace the GNSS in degraded environments, where the GNSS is unreliable or blocked [
14]. Sun et al. developed a two-step EKF integration algorithm with a non-holonomic constraint (NHC) [
16]. In their work, the authors used a monocular camera and a GPS to initialize the visual odometry (VO)/GPS, and then the first extended KF (EKF) was used for GPS/VO integration. The IMU dynamic model and estimate outcome from the initial EKF were utilized to derive the ultimate navigation solution via the secondary EKF filtering process. The results from Refs. [
14,
16] demonstrated the effectiveness of introducing more hardware types of equipment. However, more sensors mean higher power requirements, increased costs, and a larger volume.
(2) The INS/GNSS navigation system is developed with more suitable and efficient algorithms. This strategy can be divided into two categories: machine learning-based (ML-based) methods and ML-free ones.
In the ML-based domain, various learning algorithms are employed to investigate the correlation between the provided data and the GNSS signal under optimal GNSS signal quality. After a training state, the well-built model can be used to construct the pseudo-GNSS measurement. For example, Fang et al. adopted the long short-term memory (LSTM) method to predict the GNSS increment [
18]. Niu et al. introduced a GNSS error estimation technique utilizing the classification and regression tree and bootstrap aggregating (CART-Bagging) algorithm [
19]. The test outcomes demonstrated that the method enhanced the reliability of the GNSS error. However, the ML-based method requires a training step, and the quality of the dataset for training is crucial for building the model. In many practical applications, there are few available datasets to be used. Additionally, the computation complexity for machine learning is often too heavy for the integrated navigation hardware platform provided.
In the ML-free domain, many adaptive and robust filters have been proposed to improve the accuracy of navigation solutions for the INS/GNSS. It is vital to estimate the noise variance of the GNSS online so that the Kalman gain can be adaptively adjusted to a more reasonable level. The commonly used method to detect abnormal measurements is the chi-squared test based on the innovation sequence or the residual sequence [
20,
21]. The improved Sage–Husa algorithm also adopts a similar technique [
22]. However, these methods do not manage to obtain desirable results because the sequences are coupled with the error of state estimate. The second-order mutual difference (SOMD) method proposed by our group, which makes full use of the independency between the INS and GNSS, can provide satisfying results for noise variance estimation. The SOMD relies solely on measurement information, thereby circumventing any negative effects that may arise from biased state estimates [
12].
To sum up, we aim to utilize the ML-free methodology for its cost-saving characteristics in hardware and low computational complexity. This methodology can reduce the complexity, size, and cost of the hardware, while fully utilizing the information from the GNSS and the dynamic model of the INS, making it more versatile and easy to deploy.
In Kalman filtering, the state transition model and the observation model are usually known. For the measurement noise covariance matrix, the process noise covariance matrix follows certain assumptions, and then the estimate error covariance matrix cannot be decreased due to the deterministic calculation procedure. To improve estimates within the Kalman filter framework, a new approach is required. Based on this analysis, if the constructed measurements can be employed, a better estimate accuracy can be made by the KF, because the Kalman gain matrix would be changed. However, the noise of the constructed measurements should be zero mean white noise. Additionally, the covariance of the noise should also be provided. Because these are important prerequisites for the KF to obtain optimal estimates, the variables used to construct pseudo-observations must satisfy the above conditions. We intend to use the historical state estimates to construct pseudo-measurements, which should be unbiased so that the mentioned prerequisites can be satisfied.
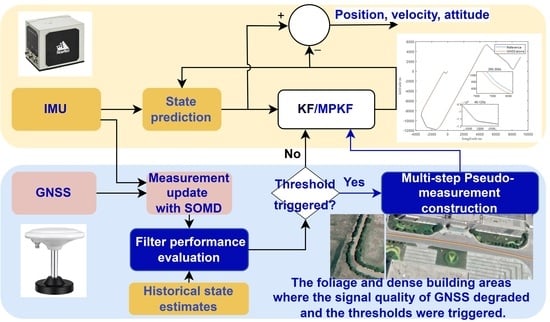
This study first conducts the performance evaluation of the KF in order to guarantee the unbiasedness of the historical state estimates used to construct pseudo-measurements. We use the SOMD method to estimate the noise covariance in the GNSS, . Meanwhile, we use another estimate of by calculating the correlation between the innovation and residual sequences. These two methods are different because the former is independent of the state estimate, while the latter is not. Further, we design the filter performance evaluation mechanism based on the difference between and . Then, a novel multi-step pseudo-measurement KF (MPKF) algorithm is proposed to enhance the precision of the state estimate.
The innovative points of this paper are summarized as below.
First, we use the SOMD method to evaluate the performance of the filter. On the one hand, is estimated online to obtain a robust estimate for the filter; on the other hand, is employed as a basic module for the filter evaluation to turn on or off the MPKF procedure by judging the unbiasedness of the historical estimates together with the calculation of the through the innovation and residual sequences.
Secondly, the MPKF algorithm is proposed, and the noise covariance of the MPKF is analyzed. Based on the performance evaluation, an adaptive mechanism is presented to suppress the negative effect led by the measurement noise. The multi-step pseudo-measurements are derived directly from the previous unbiased state estimates; therefore, if the actual measurement cannot maintain the desired accuracy, the multi-step pseudo-measurements can provide additional information to obtain a better estimated result for a given filter.
Finally, the MPKF algorithm is validated through a practical road test, demonstrating that it can enhance the accuracy of the navigation solution for the INS/GNSS integrated navigation system in comparison to other algorithms.
The remainder of this study is organized as follows. In the following section, the filter performance evaluation mechanism is proposed based on measurement noise covariance estimation (MNCE). In
Section 3, the proposed MPKF algorithm is presented, meanwhile the analysis of uncertainties and the performance of the constructed multi-step pseudo-measurements are also discussed. The MPKF-based tightly-coupled INS/GNSS integrated algorithm is presented in
Section 4. In
Section 5, the real road experiment and its results are presented, and
Section 6 draws the conclusions.
2. The MNCE and the Filter Performance Evaluation
By employing the SOMD, an MNCE is obtained, which is independent of the state estimate. By calculating the correlation between the innovation and residual sequences, another MNCE is obtained, which is relevant to the state estimate. Then, the filter performance evaluation mechanism is provided based on the difference between the two MNCEs.
2.1. The MNCE Based on the SOMD
Assuming that
and
are measurements of a signal
from the GNSS and INS, the measurements are expressed by
where
and
are the bias terms that can be assumed to be Gaussian random walk process [
23],
represents the
epoch, and
and
are uncorrelated discrete noise:
where
is the Kronecker delta function.
The self-difference for each sensor is expressed by
The mutual difference for the two sensors is expressed by
where the differences from the bias terms are neglected, because the numerical value of which is usually smaller than the noise terms. The noise covariance assumptions are expressed by
Then,
is calculated by
where
and
are neglected because the accuracy of the INS is much higher than that of the GNSS in the short term, i.e.,
. Hence, the noise covariance of the GNSS
is expressed by
A sliding window method is employed to calculate
:
where
stands for the sliding window size.
The SOMD works well when the sequences
are independent. However, due to the complex environments especially in urban areas, the independence in the mutual sequences might be violated. In this study, Burg’s method was used to calculate
if the independence was violated by the kernel density estimation (KDE) method [
12].
The important advantages of the SOMD are summarized below:
- (1)
is only based on measurements and is independent of the state estimate error.
- (2)
Given the measurements from the INS and GNSS, without any stated-related information, can be estimated by the SOMD.
- (3)
If there is a trend term bias in the noise, is not affected because of the self-difference calculation.
So, we can use as the reference, while another estimate that is not independent of the state estimate error can be obtained.
2.2. The MNCE Based on the Correlation between Innovation and Residual Sequences
For a general linear stochastic system, the process and observation models in the discrete-time form are expressed by
where
and
represent the state vector and the measurement vector, respectively.
and
are the process noise and the measurement noise at the
epoch, respectively, which are independent zero-mean white Gaussian vectors.
stands for the noise-driven matrix.
and
are the state transition matrix and observation matrix, respectively. The covariances of
and
are expressed by
The state estimate
, the Kalman gain matrix
, and state error covariance
are expressed by
The innovation is expressed by
where
represents the one-step predicted state. The residual is expressed by
The correlation of
and
is expressed by
Considering (11), the first term in the last line of (14) is calculated by:
The second one is
because both
and
are independent of
. The third term is calculated by:
By adding the four terms in (14), we can obtain . Also, this is calculated by a sliding window method similar to (8).
It is worth noting that can be affected by the state estimate, because both and are state estimate-related terms, as shown in (12) and (13), respectively. Put differently, if the state estimate is unbiased, obtained by (14) can be seen as the ideal estimate. Otherwise, might be different from the ideal measurement noise covariance, because the first and the third term in (14) might not be the results calculated by (15) and (16).
2.3. The Filter Performance Evaluation
The SOMD method and the correlation between innovation and residual sequences were used to determine the filter performance in this study. The key idea is that the former is immune to the state estimate error, and the latter is relative with the state estimate error. Hence, the SOMD can provide a solid estimate of , which can be used as the reference compared to the other one.
For practical INS/GNSS applications, if the difference between calculated using (7) and obtained by (14) is large, we can deduce that, during the calculation interval, the state estimates are biased; otherwise, the state estimates can be seen as unbiased.
3. Multi-Step Pseudo-Measurement for the KF
The accuracy of the KF relies on the precision of the measurement if the dynamic model behaves normally and the statistics of the process noise obey the a priori assumptions. To acquire more accurate measurements, one way is to utilize high-precision equipment directly, but at a higher cost as a result. Another way is to use several relatively low-precision sensors as an array simultaneously [
24,
25]. Inspired by the second methodology at the hardware level, we proposed the multi-step pseudo-measurement algorithm under the KF framework.
This paper used the difference between
and
as the indicator for evaluating the filter performance of the KF. This is important for the proposed multi-step pseudo-measurement method, because the historical estimates employed to construct the multi-step pseudo-measurement should be unbiased, so that the uncertainty or noise of the multi-step pseudo-measurement can be seen as zero-mean term. Furthermore, the modified KF can obtain better accuracy estimates. Although the noises in multi-step pseudo-measurement are correlated in that the state estimates are correlated, they can be orthogonalized by a whitening method [
26].
3.1. The Method of Constructing the Multi-Step Pseudo-Measurement
The derivation of the proposed multi-step pseudo-measurement is based on a linear system described by (9) and its corresponding assumptions. However, this method can be used in non-linear systems through appropriate modification. In
Section 5, an EKF-based real road experiment is shown as a practical application for a non-linear application.
The multi-step pseudo-measurement is expressed by
where
stands for the pseudo-measurement constructed from
, and
is the pseudo-measurement matrix. Because the ideal state of
cannot be obtained, it is replaced by
, and
is the estimate error. Let
denote
, the superscript
here stands for ‘pseudo’; then, the augmented measurement equation can be rewritten in a compact form as
, whose terms are defined as
where
when
; again, this is why we proposed the filter performance evaluation method to judge the unbiasedness of the state estimates. Then, the variance of
is denoted as
:
where the
components are obtained based on the fact that
is independent of
and
.
and
are expressed, respectively, by
Moreover, (19) shows that
is not a diagonal matrix. To lighten the computational load on the inverse operation in calculating the Kalman gain,
can be transformed into independent measurements through the Cholesky decomposition [
26]; then,
can be a diagonal matrix.
Then, the Kalman gain, the state estimate, and the error covariance are calculated, respectively, as
It can be noticed that the optimal filter requires that the noise of the measurement should be orthogonal to the state estimate error ; otherwise, the Kalman gain cannot be calculated by (22). In this study, the noise of the constructed multi-step pseudo-measurement is not orthogonal to ; however, we used (22) to calculate the Kalman gain because this approximation can achieve an acceptable navigation solution accuracy.
In this paper, we only used to construct the pseudo-measurements because, if , there is a linear correlation between the one-step pseudo-observation and the state prediction, and if , more computational loads are needed and more process uncertainties might be introduced.
Based on the proposed filter performance evaluation method, we designed the following mechanism to utilize the multi-step pseudo-measurements, which were constructed using the historical unbiased state estimates.
If is greater than its nominal value (e.g., from the GNSS receiver manual), and there is no vast difference between and , the current filter performance can be considered normal, i.e., the estimates are unbiased and can be employed for the construction. Then, a multi-step pseudo-observation procedure is initiated to suppress the errors caused by deteriorating measurement systems. For INS/GNSS applications, the majority of navigation solution errors come from this circumstance. So, this is the key problem that this paper aimed to tackle.
If decreases to the normal level, it indicates that the accuracy of the measurement system is acceptable, and the pseudo-observation mechanism is exited to return to the normal filtering procedure. On the one hand, even if is unchanged, the proposed multi-step pseudo-observation algorithm still has the ability to enhance the accuracy of the navigation solution, only if the historical estimates are unbiased. This is left for our future work. On the other hand, if the filter performance degrades due to other disturbances, such as model errors or changes in process noises but , some other adaptive algorithms can be employed to improve the navigation solutions.
3.2. The Analysis of the Performance of the Proposed MPKF
The matrix
can be used as the metric to evaluate the performance of a given filter [
27]. Compared to the KF, (24) can generate a smaller
than
.
The derivation details are as follows. Through the Cholesky decomposition,
is expressed by
Then,
is defined as
where
is the identity matrix of the corresponding dimension. By left multiplying
, the noise term in (18) is expressed by
Then, the covariance of
is expressed by
Now, all the noise terms are independent, and
can be calculated through the sequential Kalman filtering process as follows:
where
,
, and
are the estimation results of the standard KF. Then, the pseudo-observation is employed to calculate
:
where
It can be concluded that
, in that
, is a positive definite diagonal matrix. This conclusion can also be illustrated by an intuitive way in that a more reliable measurement can result in a greater Kalman gain.
However, if the noise of the multi-step pseudo-observation is greater than a threshold, it has a negative impact on the state estimation; so, it is necessary to set a threshold for employing the pseudo-observation method. Because the ideal state
could not be obtained, given
and
, the residual
can be obtained.
can be seen as the optimal estimate from the standard KF procedure; meanwhile, the pseudo-observation-based innovation
is expressed by
The 2-norm of
and
can be used as the filter performance index to decide whether the pseudo-observation procedure executes or not. If the following inequation holds, the pseudo-observation procedure executes.
Remark 1. For a specific application, not all state variables are equally crucial. Therefore, (33) can be adapted to focus on the relevant state variables. Additionally, it is important to note that, if some state variables differ by an order of magnitude in value, the variable with the larger numerical value has a greater impact on the equation’s norm. For INS/GNSS applications, the numerical value of the position, velocity, and attitude are greater than other elements, such as the bias of the gyroscope drift and the accelerometer error.
Remark 2. For applications in which no actual redundancy measurement exists, (33) must be used.
Remark 3. In the above derivation, . For different applications, the selection of can be designed according to the practical engineering circumstance. Meanwhile, the scalar can also be tuned for a certain application.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}