



Broadband Source Localization Using Asynchronous Distributed Hydrophones Based on Frequency Invariability of Acoustic Field in Shallow Water

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basic Theory
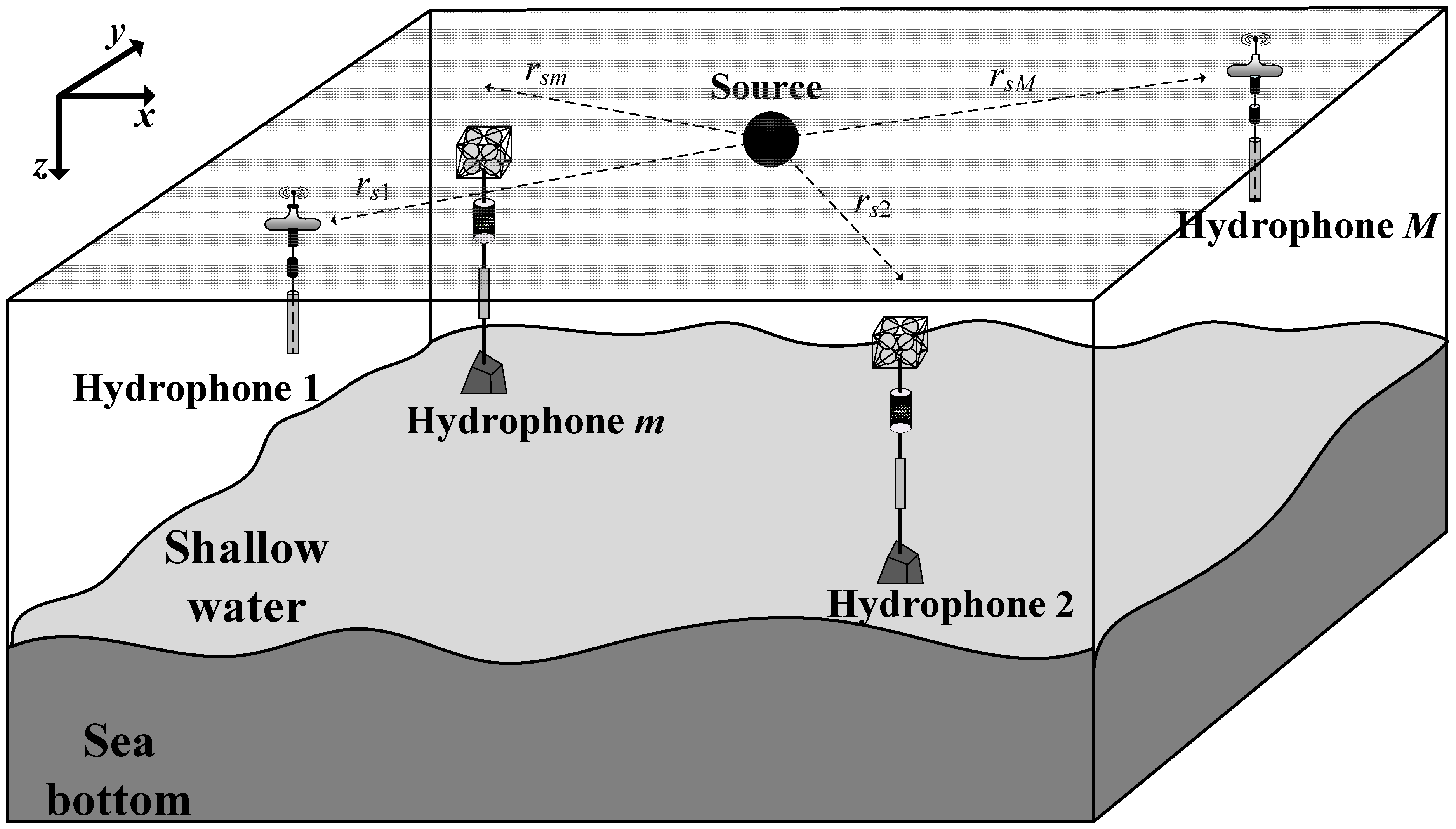
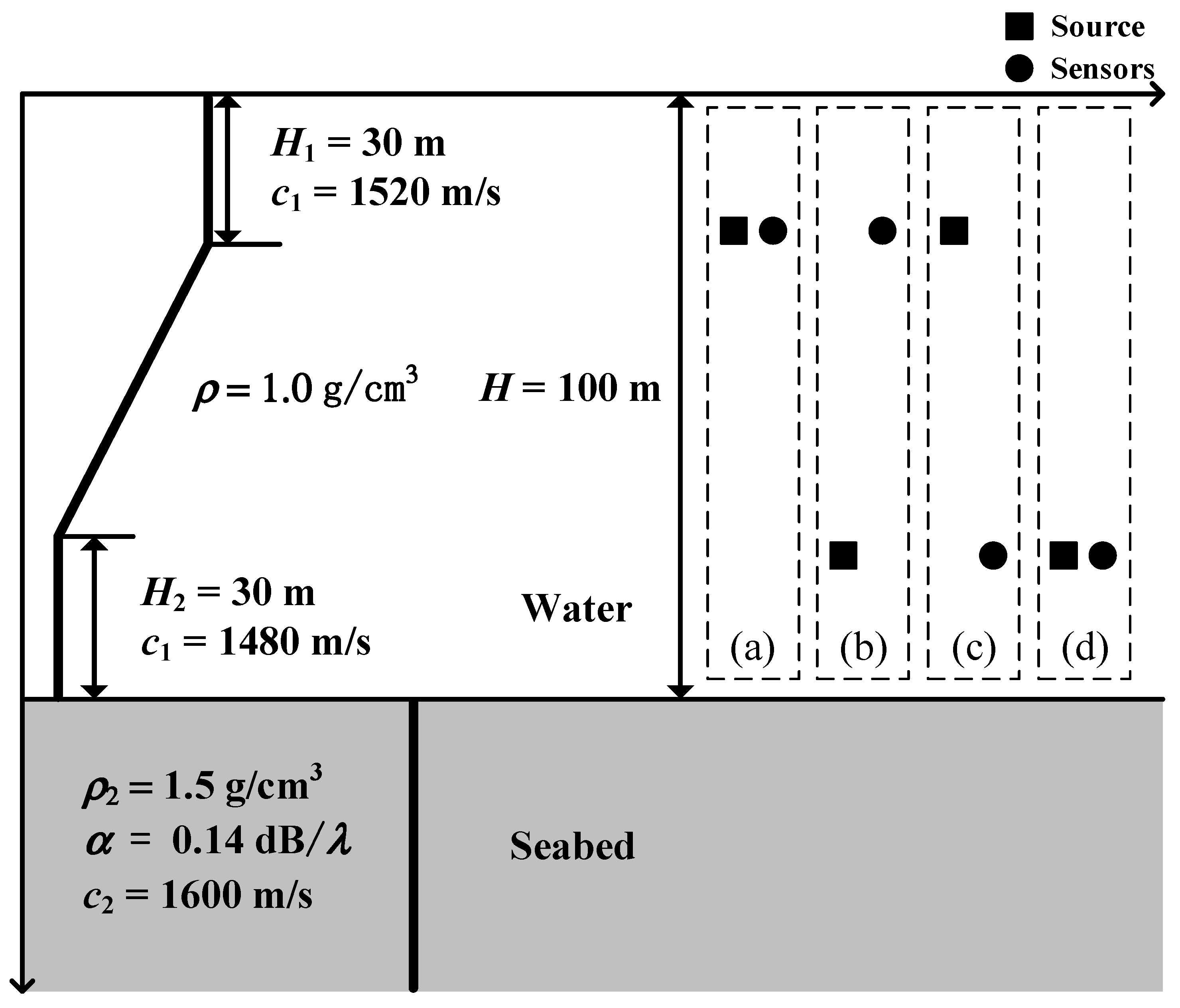
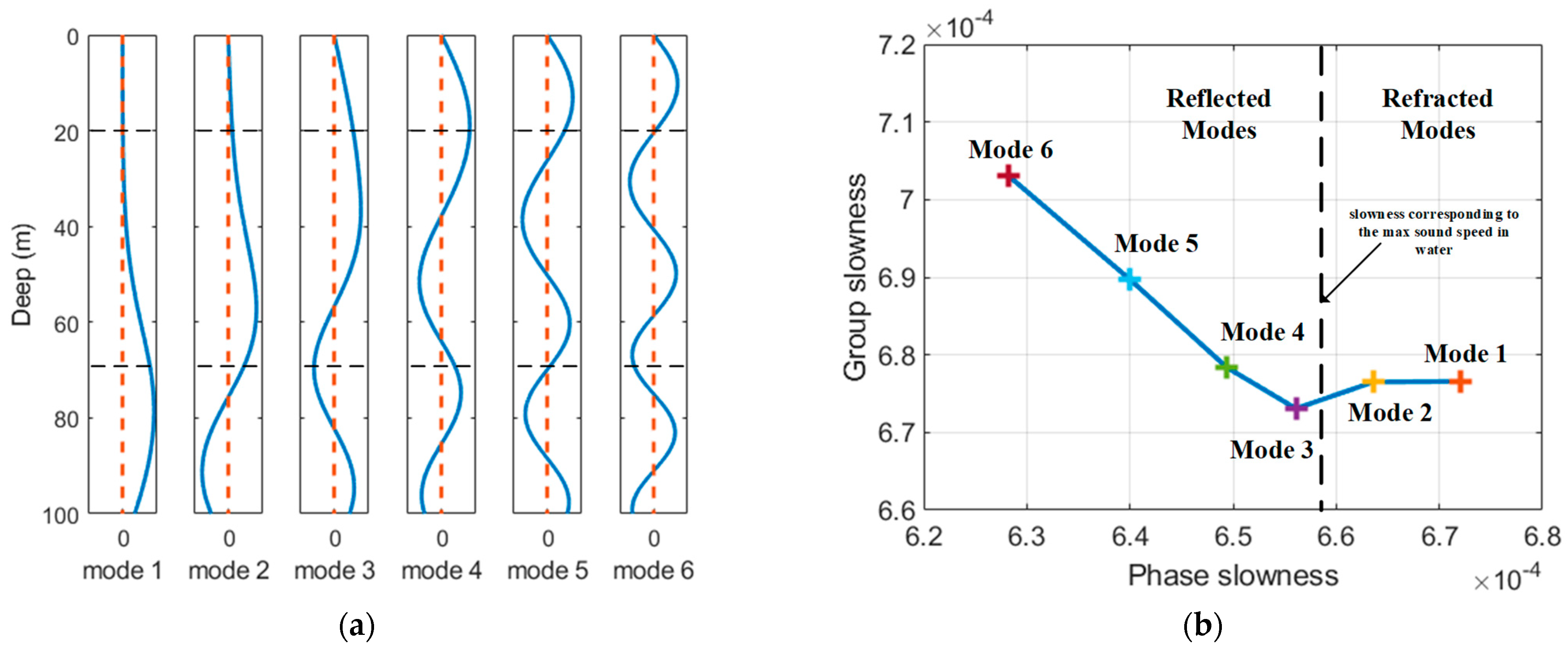
2.1. Application Scene and Normal Mode Theory
2.2. Warping Transform of the Autocorrelation Function
3. Proposed Localization Method
- (1)
- Deploy M hydrophones at a common depth to record the signal radiated by a broadband source. The location and received signal of the mth hydrophone are denoted as pm = [xm, ym]T and xm(t), respectively;
- (2)
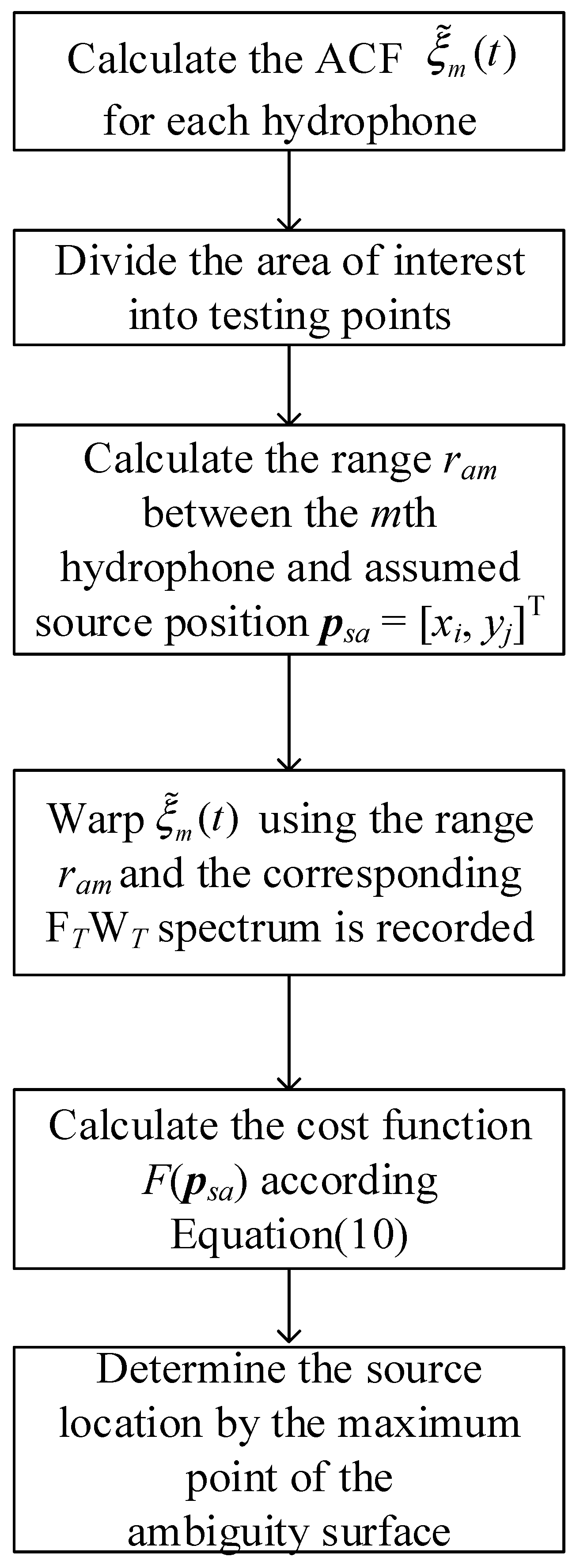
- Calculate the unilateral ACF denoted as ;
- (3)
- Divide the area of interest into grid points, denoted as [xi, yj], i = 1, 2, …, Lx, j = 1, 2, …, Ly, where Lx and Ly are the number of the grid on the x and y axes, respectively;
- (4)
- Calculate the range between psa and pm for each grid point psa = [xi, yj]Tand apply the warping transform to based on ram to obtain the warped ACF . The resampling function of the warping is given as:where ca is the sound speed used in the warping transform;
- (5)
- Apply the Fourier/wavelet transform to to calculate the FTWT spectrum FWm (psa, f);
- (6)
- Calculate the cost function Equation (10) based on the FTWT spectra obtained by all M hydrophones;
- (7)
- Conduct steps (4)–(6) for each scanning point to obtain the localization ambiguity surface and determine the source location by the maximum point.
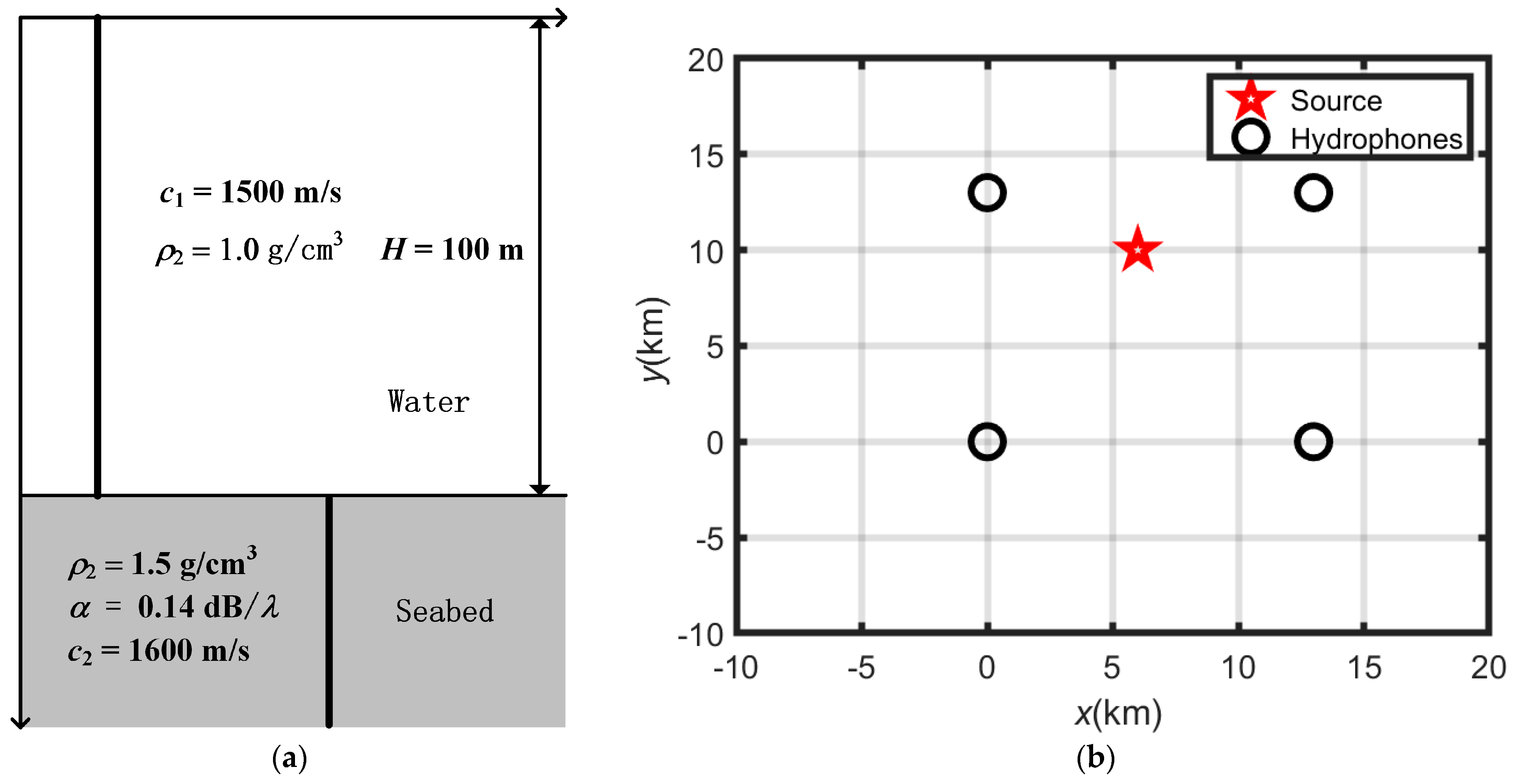
4. Simulation Demonstration
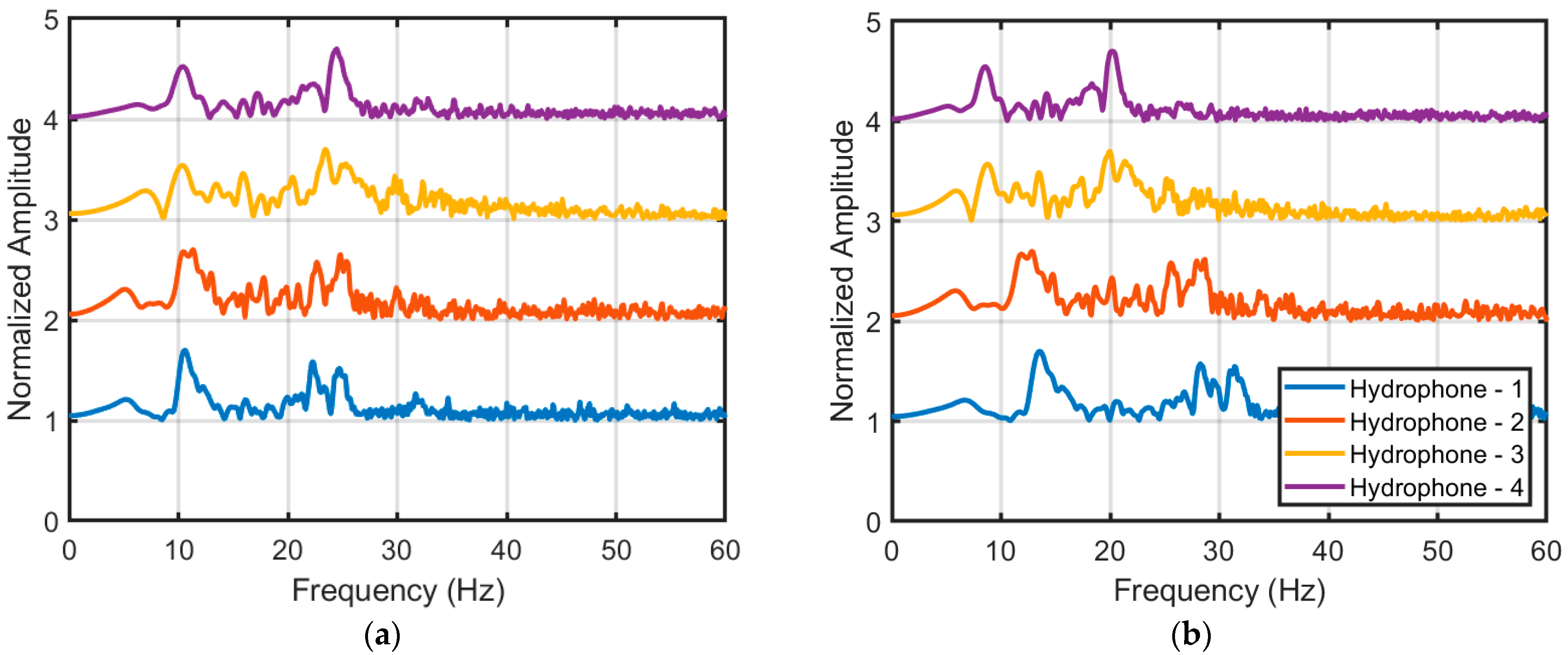
4.1. Effectiveness Verification
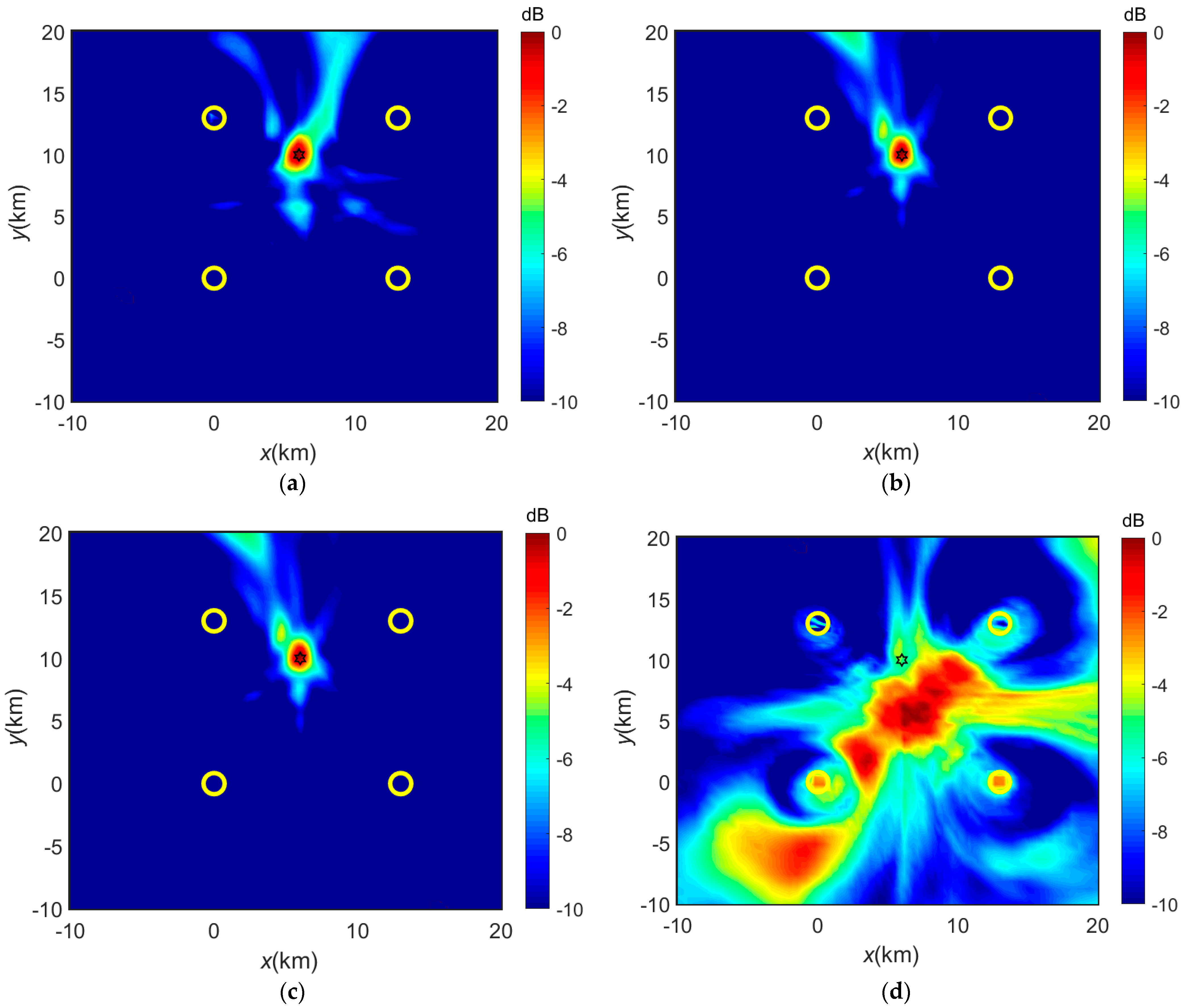
4.2. Performance Analysis
- Hydrophone Distribution
- Hydrophone Depth
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Livingston, E. Effects of sound-speed mismatch in the lower water column on matched-field processing. J. Acoust. Soc. Am. 1992, 91, 2363–2364. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A.; Poter, M.B.; Schmidt, H. Computational Ocean Acoustics, 2nd ed.; Springer: New York, NY, USA, 2011. [Google Scholar]
- Cockrell, K.L.; Schmidt, H. Robust passive range estimation using the waveguide invariant. J. Acoust. Soc. Am. 2010, 127, 2780–2789. [Google Scholar] [CrossRef]
- Song, H.C.; Cho, C. Array invariant-based source localization in shallow water using a sparse vertical array. J. Acoust. Soc. Am. 2017, 141, 183–188. [Google Scholar] [CrossRef] [PubMed]
- Song, H.C.; Cho, C.; Byun, G.; Kim, J.S. Cascade of blind deconvolution and array invariant for robust source-range estimation. J. Acoust. Soc. Am. 2017, 141, 3270–3273. [Google Scholar] [CrossRef] [PubMed]
- Song, H.C.; Cho, C. The relation between the waveguide invariant and array invariant. J. Acoust. Soc. Am. 2015, 138, 899–903. [Google Scholar] [CrossRef] [PubMed]
- Qi, Y.-B.; Zhou, S.; Ren, Y.; Liu, J.-J.; Wang, D.-J.; Feng, X.-Q. Passive source range estimation with a single receiver in shallow water. Acta Acust. 2015, 40, 144–152. [Google Scholar]
- Zhou, S.; Qi, Y.; Ren, Y. Frequency invariability of acoustic field and passive source range estimation in shallow water. Sci. China-Phys. Mech. Astron. 2014, 57, 225–232. [Google Scholar] [CrossRef]
- Julien, B.; Aaron, T.M.; Susanna, B.B.; Katherine, K.; Michael, M.A. Range estimation of bowhead whale (Balaena mysticetus) calls in the Arctic using a single hydrophonea. J. Acoust. Soc. Am. 2014, 136, 145–155. [Google Scholar]
- Doğançay, K. Bearings-only target localization using total least squares. Signal Process. 2005, 85, 1695–1710. [Google Scholar] [CrossRef]
- Dogancay, K.; Ibal, G. Instrumental Variable Estimator for 3D Bearings-Only Emitter Localization. In Proceedings of the 2005 International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, Australia, 5–8 December 2005; pp. 63–68. [Google Scholar]
- Hawkes, M.; Nehorai, A. Wideband source localization using a distributed acoustic vector-sensor array. IEEE Trans. Signal Process. 2003, 51, 1479–1491. [Google Scholar] [CrossRef]
- Kaplan, L.M.; Le, Q.; Molnar, N. Maximum likelood methods for bearings-only target localization. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Salt Lake City, UT, USA, 7–11 May 2001; Volume 5, pp. 3001–3004. [Google Scholar]
- Kaplan, L.M.; Le, Q. On exploiting propagation delays for passive target localization using bearings-only measurements. J. Frankl. Inst. 2005, 342, 193–211. [Google Scholar] [CrossRef]
- Wang, Z.; Luo, J.; Zhang, X. A novel location-penalized maximum likelihood estimator for bearing-only target localization. IEEE Trans. Signal Process. 2012, 60, 6166–6181. [Google Scholar] [CrossRef]
- Luo, J.; Shao, X.; Peng, D.; Zhang, X. A Novel Subspace Approach for Bearing-Only Target Localization. IEEE Sens. J. 2019, 19, 8174–8182. [Google Scholar] [CrossRef]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Foy, W.H. Position-Location Solutions by Taylor-Series Estimation. IEEE Trans. Aerosp. Electron. Syst. 1976, AES-12, 187–194. [Google Scholar] [CrossRef]
- Ho, K.C. Bias Reduction for an Explicit Solution of Source Localization Using TDOA. IEEE Trans. Signal Process. 2012, 60, 2101–2114. [Google Scholar] [CrossRef]
- Schau, H.; Robinson, A. Passive source localization employing intersecting spherical surfaces from time-of-arrival differences. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1223–1225. [Google Scholar] [CrossRef]
- Laurinolli, M.H.; Hay, A.E. Localisation of right whale sounds in the workshop bay of fundy dataset by spectrogram cross-correlation and hyperbolic fixing. Can. Acoust. 2004, 32, 132–136. [Google Scholar]
- Desharnais, F.; Côté, M.; Calnan, C.J.; Ebbeson, G.R.; Thomson, D.J.; Collison, N.E.; Gillard, C.A. Right whale localisation using a downhill simplex inversion scheme. Can. Acoust. 2004, 32, 137–145. [Google Scholar]
- Bonnel, J.; Touze, G.L.; Nicolas, B.; Mars, J.I.; Gervaise, C. Automatic and passive whale localization in shallow water using gunshots. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–6. [Google Scholar]
- Gervaise, C.; Vallez, S.; Stephan, Y.; Simard, Y. Robust 2D localization of low-frequency calls in shallow waters using modal propagation modelling. Can. Acoust. 2008, 36, 153–159. [Google Scholar]
- Porter, M.B. The KRAKEN Normal Mode Program; Technical Report; Naval Research Laboratory: Washington, DC, USA, 1992. [Google Scholar]
- Qi, Y.; Zhou, S.; Zhang, R. Warping transform of the refractive normal mode in a shallow water waveguide. Acta Phys. Sin. 2016, 65, 134301. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Huang, J.; Xu, Z.; Yang, K.; Qin, J. Broadband Source Localization Using Asynchronous Distributed Hydrophones Based on Frequency Invariability of Acoustic Field in Shallow Water. Remote Sens. 2024, 16, 982. https://doi.org/10.3390/rs16060982
Li H, Huang J, Xu Z, Yang K, Qin J. Broadband Source Localization Using Asynchronous Distributed Hydrophones Based on Frequency Invariability of Acoustic Field in Shallow Water. Remote Sensing. 2024; 16(6):982. https://doi.org/10.3390/rs16060982
Chicago/Turabian StyleLi, Hui, Jun Huang, Zhezhen Xu, Kunde Yang, and Jixing Qin. 2024. "Broadband Source Localization Using Asynchronous Distributed Hydrophones Based on Frequency Invariability of Acoustic Field in Shallow Water" Remote Sensing 16, no. 6: 982. https://doi.org/10.3390/rs16060982
APA StyleLi, H., Huang, J., Xu, Z., Yang, K., & Qin, J. (2024). Broadband Source Localization Using Asynchronous Distributed Hydrophones Based on Frequency Invariability of Acoustic Field in Shallow Water. Remote Sensing, 16(6), 982. https://doi.org/10.3390/rs16060982