1. Introduction
The main purpose of exploring gravity data interpretation is to realize the quantitative inversion of field source parameters. Gravity inversion is the process of obtaining the physical properties and spatial structures of subsurface anomalous bodies using gravity observation data, which is an important aspect of gravity data interpretation. In traditional gravity inversion, the subsurface space is evenly divided into several prisms, each with specific physical property parameters. Then, a suitable objective function is established to make the inversion results fit the actual situation as closely as possible. Existing 3D inversion methods can be categorized into linear and nonlinear inversion methods. Both of these approaches are widely used in the inversion of gravity data. Linear inversion methods use optimization techniques to minimize the objective function and can quickly estimate the underground density distribution in gravity inversion [
1]. Li and Oldenburg proposed two linear methods based on the objective function for inverting gravity anomalies to recover the 3D distribution of density contrast [
2]. These methods, while relatively fast, are sensitive to initial guesses and their performance is limited. Nonlinear methods reduce the dependence on the initial model, including ant colony algorithms, genetic algorithms, particle swarm optimization algorithms, neural network methods, etc. [
3,
4,
5,
6,
7,
8,
9,
10]. Among the nonlinear methods, neural networks show good performance.
In recent years, machine learning has seen rapid development and advancement. As an emerging and important branch of machine learning, deep learning has demonstrated excellent performance in the recognition and classification of speech and image processing, especially in inverse problems such as model reconstruction [
11,
12,
13]. With the continuous progress of deep learning methods, geophysical data processing and inversion methods based on deep learning have also seen robust development and achieved good results [
14,
15]. One of the aims of geophysical inversion methods is to obtain the mapping relationships between geologic models and gravity anomalies. Geophysical inversion based on deep learning achieves the above purpose through neural networks with geological model labels. Zhang et al. proposed a 3D gravity inversion method based on encoder–decoder neural networks. Constructing a highly random data set for hyperparameter experiments improved the network’s accuracy and generalizability.Numerical examples showed that the accuracy of the network can reach 97% [
16]. Huang et al. used a new gravity inversion method based on a supervised full, deep convolutional neural network [
17]. They generated subsurface density model distribution from the gravity data and used many data sets to train the network and derive good model inversion outcomes, but the forward fitting of the inversion results was inaccurate. Wang et al. developed a new 3D gravity inversion technique based on 3D U-Net ++, in which the input and output of the network are 3D, and the depth resolution is low [
18]. Hu et al. successfully recovered the physical property distribution of magnetic ore bodies using deep learning inversion methods [
19]. This approach was data-driven and did not include prior knowledge. Zhang et al. constructed a new neural network (DecNet) for deep learning inversion [
20]. This method can learn boundary positions, vertical centers, thickness and density distributions, and other attributes through 2D-to-2D mapping and use these parameters to reconstruct a 3D model. Yang et al. suggested a gravity inversion method utilizing convolutional neural networks (CNNs), where the trained algorithm can quickly determine the subsurface density distribution, but its training model was too simple and lacked practical data applications [
21]. However, current deep learning methods tend to be data-driven, using large-scale data training sets to produce inversion networks with strong generality. The advantage of these methods is that they can obtain reasonable inversion results when the data set is rich enough. However, the disadvantage of these methods is also apparent: they depend on the complexity and richness of the data set. In fact, the amount of geophysical field data is generally small, and the corresponding label—the corresponding underground density model—is missing. Generally, the data set used for training is built by generating a density model and then calculating the forward data. Because of the computational cost, the data set cannot be infinite, and the actual geological condition is very complicated, so there are great differences between the model and the actual situation. Therefore, the effect of this method is sometimes not ideal in practical applications and lacks high accuracy.
To achieve efficient and accurate geophysical inversion, Sagar Singh et al. proposed a new unsupervised deep learning method, which is divided into two phases [
22]. The first phase uses the generalization power of convolutional neural networks (CNNs) to generate an estimate of acoustic impedance (AI) while also adding a Bayesian layer to measure the model’s errors and improve its interpretability. The second stage combines physical information to generate synthetic data from subsurface AI distributions. This method not only achieves uncertainty mapping but also eliminates the need to use labeled data for training. A new network structure, called SG-Unet, was proposed by Yuqi Su et al. [
23]. The authors added the adjacent traces of each trace into the network for training to improve the lateral continuity of the network prediction results. In addition, geophysical constraints were added to the network to improve the accuracy and stability of the prediction results. In practical applications, the transfer learning strategy was also introduced. Jian Zhang et al. proposed a new inversion network structure for seismic inversion with initial model constraints [
24]. After pretraining the network, the transfer learning strategy was introduced with the aim of fine-tuning the network by using the labeled data in the real survey. Yuqing Wang et al. proposed a new seismic impedance inversion method [
25]. This method is based on deep learning and introduces physical constraints in the inversion process. The prediction results indicated that the method could significantly improve the prediction accuracy. In recent years, a number of studies have used neural networks instead of a forwarding operator, which greatly speeds up the forwarding process [
26,
27,
28,
29].
In this study, a deep learning gravity inversion method based on a self-constrained network is proposed. This method constructs a new self-constrained network composed of two networks with similar structures but different functions. The two network modules perform 2D-to-3D and 3D-to-2D mapping, respectively. Therefore, unlike previous 2D-to-3D inversion methods, the proposed method utilizes 2D-to-2D mapping. At the same time, a fine-tuning strategy is introduced in the inversion process. When the gravity data are input into the self-constrained network, the output is the gravity data of the predicted inversion result, and the predicted 3D inversion results are the output in the intermediate process. Because of the control of the self-constrained network and the optimization of the fine-tuning strategy, this network can obtain more reliable and accurate inversion results.
2. Method
2.1. Deep Learning Inversion Theory
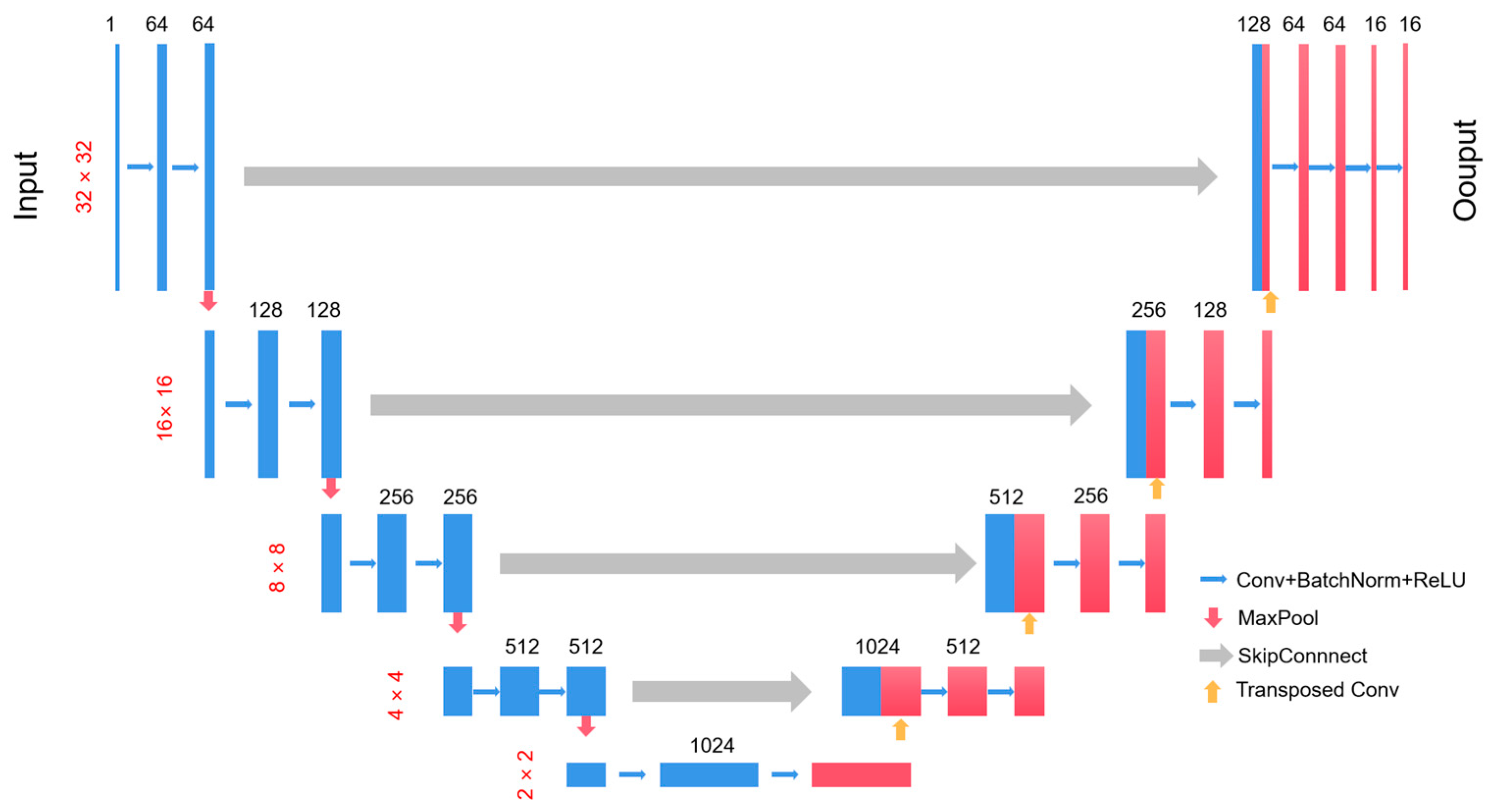
In this study, a U-Net network structure was used for deep learning, and a gravity forward modeling sample set was established for network training. As shown in
Figure 1, the U-Net network is a typical full convolutional network (FCN), similar in shape to the letter “U”. The network is made up of two parts: one is the feature extraction layer on the left, also called the encoder, and the other is the upsampling process on the right, also called the decoder.
The left side of the network, the encoder, is a series of downsampling processes consisting of convolution and pooling. The whole consists of four submodules, each containing two convolutional layers, and each submodule is downsampled by a convolutional operation with a convolutional kernel of 2 × 2 and a step size of two. Also, a dropout layer is added to prevent overfitting.
The decoder is symmetrical to the encoder and also consists of four modules. It gradually learns features via upsampling until the output resolution matches the resolution of the input image. Meanwhile, a jump connection is used between the left and right parts to connect the upsampling result with the output of the submodule with the same resolution in the encoder, which is then used as the input of the next submodule in the decoder in order to obtain more accurate information and achieve better results.
The network uses batch learning; the batch size is 32, and the convolutional layers of the network are connected through the ELU activation function to increase the nonlinearity of the neural network and improve the ability of network learning and fitting. The optimizer selects Adam. Finally, the Tanh activation function is used to predict each pixel in the channel and generate the predicted subsurface density model. The above steps achieve the mapping of gravity data to the 3D prediction model via 2D-to-3D mapping. By modifying the number of input and output channels and the activation function, we can obtain a new network that can realize 3D-to-2D mapping.
Fine-tuning has become a common technique for using deep learning networks. When using deep networks for image processing tasks, using a model pretrained on a large data set to fine-tune its own data can often achieve better results than directly training on its own data because the model parameters pretrained on a large data set are in a better position from the beginning of the fine-tuning process and the fine-tuning can speed up the network convergence. When using large data sets for training, pretrained models have the ability to extract shallow basic features and deep abstract features. Without fine-tuning, training must begin from scratch, which requires a lot of data, computing time, and computing resources. In addition, risks such as model nonconvergence, insufficient parameter optimization, low accuracy, low generalization ability, and easy overfitting are present. Using fine-tuning can effectively avoid the above problems.
The process of fine-tuning involves initializing the built network with the trained parameters (obtained from the trained model) and then training with the data, adjusting the parameters in the same way as in the training process. For the initialization process, the constructed network is the target network, and the network corresponding to the trained model is the source network. The layer of the target network to be initialized should be the same as that of the source network (the name, type, and setting parameters of the layer are the same).
2.2. Self-Constrained Network
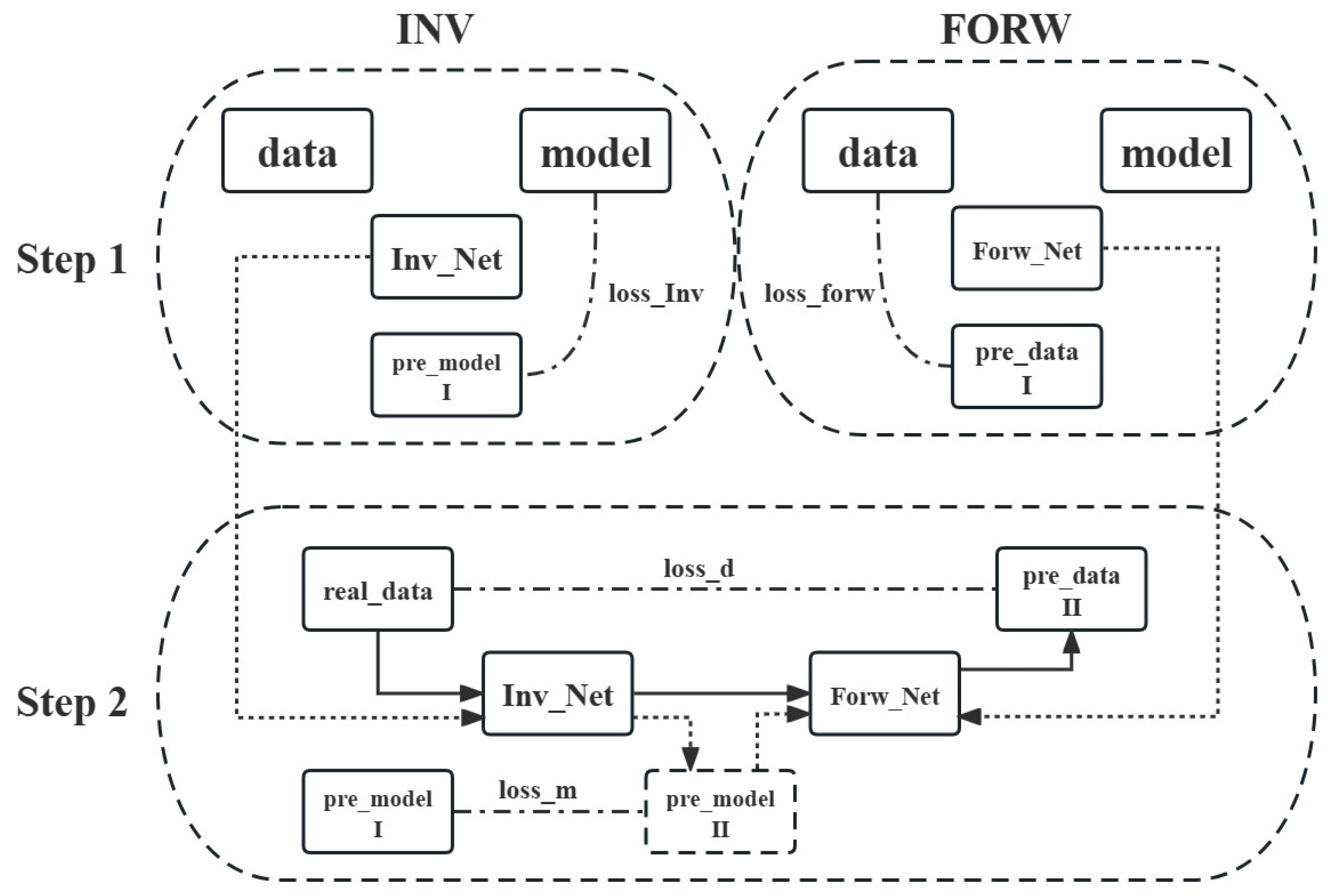
The data processing procedure used in this study is shown in
Figure 2. The whole process is divided into two steps. The first step is to obtain two networks with good enough generalization using the data-driven deep learning method and realize 2D-to-3D and 3D-to-2D mapping. These two networks are called Inv_Net and Forw_Net. The second step is to build a new self-constrained network and introduce fine-tuning strategies based on data-driven deep learning so as to improve and optimize the prediction results obtained in the previous step, making them more reliable and accurate.
In the first step, we constructed a large number of random data sets to train the network in order to achieve strong generalization. When training Inv_Net, the input was 2D data, and the output was a 3D density model. In contrast, Forw_Net was trained with a 3D density model as the input and 2D gravity data as the output. The loss function of the two networks is defined as:
where
and
m represent the predicted models I and real models, and
and
d represent the predicted data I and true gravity data, respectively.
For traditional geophysical forward modeling, which typically divides the entire subsurface into N equally sized cubes, each with defined physical properties, the forward modeling of gravity anomalies can be expressed as:
where
d represents the observed gravity anomaly data vector,
m represents the residual density value vector of the model, and
S represents the forward operator.
Because of their powerful nonlinear mapping capabilities, deep neural networks can represent any complex function. Therefore, once the mapping relationship of the neural network has been determined, it can be used to perform fast mapping to move from one thing to its corresponding other thing. In this paper, a U-Net network was used to approximate the forward modeling process and map the 3D gravity density model to the 2D gravity data, which can be expressed as:
where
d represents the predicted gravity data,
m represents the density model,
F represents the forward network, and
represents the parameters that the forward network needs to learn.
Forw_Net implements the above process of mapping a 3D density model to the 2D gravity data. By building large random data sets for training, Forw_Net can achieve high accuracy and be much faster.
The second step is the establishment of a self-constrained network and the introduction of the fine-tuning strategy. The process of fine-tuning involves initializing the built network with trained parameters (obtained from the trained model) and then training with the data, adjusting the parameters in the same way as in the training process. For the initialization process, the constructed network can be called the target network, and the network corresponding to the trained model is the source network. The layer of the target network to be initialized should be the same as that of the source network (the name, type, and setting parameters of the layer are the same).
In this study, the second step connected the same two networks as in the first step and initialized them. Therefore, the networks in the first step were the source networks, while the network in the second step was the target network. The input of the self-constrained network was 2D gravity data, and the output was also 2D gravity data, but the 3D density model can be output in the intermediate process. The network model parameters trained in the first step were loaded into the self-constrained network, and then the network was trained. Because the pretrained model has a strong enough generalization, that is, it has learned enough features, instead of retraining the entire network, certain layers can be fine-tuned. The specific approach was used to freeze the feature extraction portion and fine-tune the remaining layers using a lower learning rate. The target data of the second step were the unlabeled data, that is, the actual measured data. In order to obtain the labels required for supervised learning, the first step is to obtain a basic predicted model through the inversion network and fine-tune and improve on this basis. In this case, the loss function was defined as:
where,
and
represent the predicted model II and predicted model I, respectively, and
and d represent the predicted data II and true gravity data, respectively. The second fine-tuning process involves the improvement and optimization of the generalization inversion results, so only a small amount of data is required. Meanwhile, the forward data fitting constraint was added so that the fine-tuning results were not only optimized in the inversion results but also had better forward fitting. The second step was the improvement and optimization of the results of the generalization inversion, so only a small amount of data was required. At the same time, a self-constrained control was added so that the fine-tuning results were not only optimized on the inversion results but also had better forward-fitting accuracy.
4. Application of Field Data
Geothermal energy is the third largest renewable energy resource in the world. Dry, hot rocks are important geothermal resources, referring to rock bodies with temperatures higher than 180 °C and very low fluid content, whose thermal energy can be utilized by existing technologies. At present, their reserves are relatively abundant in the world, and it is generally believed that dry, hot rocks are mainly stored about 3–10 km underground. For these rocks to be utilized by humans, they need to have several characteristics, such as high temperature, shallow burial depth, and low development and utilization difficulty and cost. According to a statistical report released by the Massachusetts Institute of Technology in 2006, dry, hot rock reserves are extremely abundant in the world, and the energy of dry, hot rock reserves at a depth of 3–10 km underground is equivalent to nearly 3000 times the total energy consumption of the United States in 2005 [
31].
Gonghe Basin is located in an area with significantly concentrated geothermal activities and features significant geothermal anomalies, with a high heat flow value of 90 to 300 mW/m
2 [
32]. The Gonghe Basin is not only rich in hydrothermal geothermal resources but is also one of the areas with the most potential for the development of hot, dry rock geothermal resources in China. It has been shown that the average geothermal gradient in the Republican Basin is more than double the standard geothermal gradient [
33].
Gonghe Basin, the third largest basin in Qinghai Province, is about 280 km long and 95 km wide. It covers an area of about 15,000 km
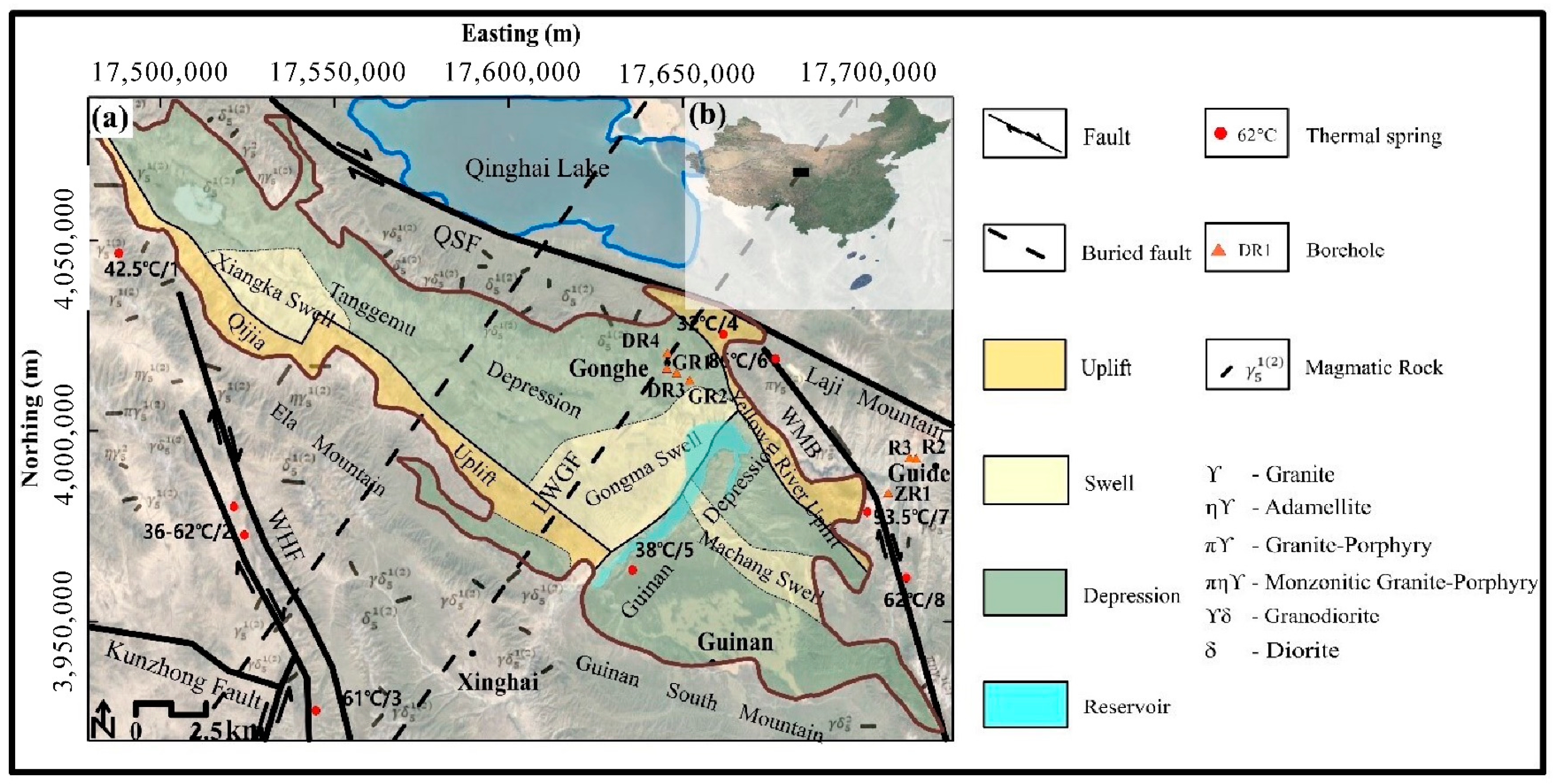
2 and has a diamond distribution shape. As shown in
Figure 8, located in the northeast margin of the Qinghai–Tibet Plateau, the Gonghe Basin is surrounded by several tectonic belts, orogenic belts, and faults. The west side of the basin is bounded by the Wahongshan strike-slip fault and Qaidam–East Kunlun fault and is adjacent to the West Qinling block. On the east side, the basin is bounded by the Duohemao Fault and adjacent to the Bayankela Basin. The southern part of the basin is bounded by the Anyemakeng suture belt and adjacent to the Songpan–Garze fold belt, while the northern part of the basin is bounded by the Qinghai Lake Nanshan Fault and adjacent to the Qilian orogenic belt. It is the most intense deformation area of the Qinghai–Tibet Plateau since the late Cenozoic [
34,
35,
36]. Subject to plate collision, the northeastern part of the Qinghai–Tibetan Plateau is still in the stage of deformation and is currently undergoing continuous uplift. Because of the existence of ruptures, the geological structure of the surrounding area has become very complex, structurally heterogeneous, and unstable, so the Gonghe Basin area has strong tectonic activity [
37].
A complete geothermal system consists of three main components: a cap rock, a heat reservoir, and a heat source. Gao et al. also analyzed and discussed the three components of the Gonghe Basin using 3D magnetotelluric imaging [
39]. The results show that the resistivity near the surface is very low, which corresponds well with the deposited material. The cap rock of a geothermal system is generally a low-permeability layer, which mainly prevents heat loss. The cap rock in the Gonghe Basin corresponds to Quaternary sediments with a thickness of 700 to 1600 m. Previous research has focused on the basin’s heat sources, with two large low-resistivity anomalies at depths of 15 to 35 km being found. Combined with the relevant data, it can be inferred that this area is composed of a molten body, which is the heat source of the geothermal system in the Gonghe Basin. The 3D resistivity model also showed a general low-resistivity anomaly beginning at a depth of 3 km, which was interpreted as a reservoir of the Gonghe Basin geothermal system.
Hirt et al. obtained the distribution of ultrahigh-resolution gravity anomalies in this region, showing that this region is associated with low-gravity anomalies [
40]. This indicates the presence of low-density rock formations below the study area. As the temperature rises, the seismic speed and density of the rock decrease [
39]. Therefore, the inversion of gravity data in this area can predict the distribution of underground heat reservoirs.
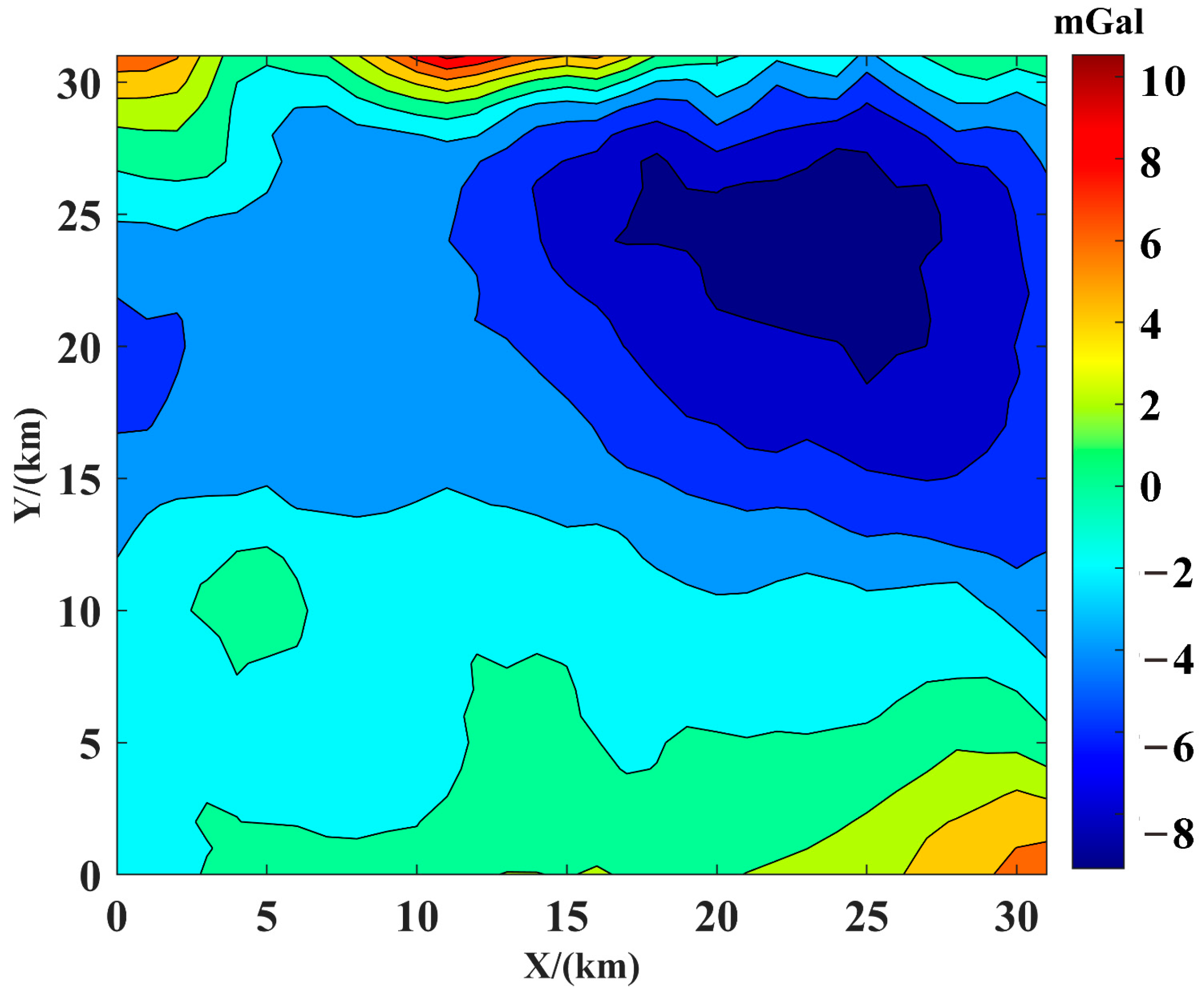
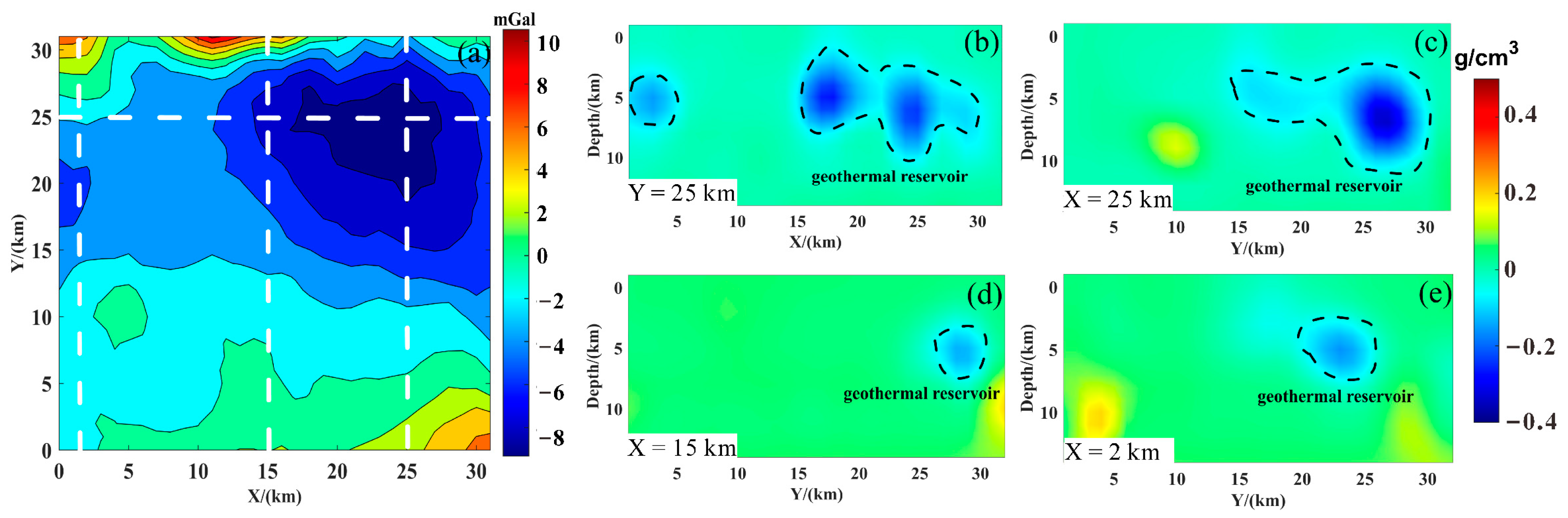
Figure 9 shows the gravity anomaly data collected in the Gonghe Basin. In order to prove the effectiveness of our method in real situations and detect the distribution of heat reservoirs, we applied it to the Gonghe Basin region. Using the trained network model, we processed the gravity data and divided the subsurface space into 32 × 32 × 16 = 16,384 prisms. According to the process, the gravity data were first input into the inversion network, and the preliminary prediction model was obtained. Then, the gravity data and preliminary prediction model were input into the self-constrained network, and 3D inversion results were obtained after prediction. In order to clearly display the inversion result, four cross sections were selected, as shown in
Figure 10b–e. The white dotted line in
Figure 10a is the location of the four profiles, and the black dotted line in
Figure 10b–e is the geothermal reservoir. They clearly show a wide range of negative density anomalies in the subsurface, with depths ranging from approximately 3 to 10 km. This is consistent with the results obtained by Gao et al., indicating that the distribution of heat reservoir is roughly within this range. The results also showed that the subsurface negative density anomalies are mainly distributed in the east and the west. The scale of the negative density anomalies is larger in the east, and there are also smaller negative density anomalies in the west. This indicates that there are also small reserves in the west. The 3D inversion results were generally effective in mapping geothermal storage areas, which indicates that the inversion method has a good effect on the actual data processing and interpretation.
5. Conclusions
In this paper, a deep learning gravity inversion method based on a self-constrained network was proposed. On the basis of the data-driven deep learning gravity inversion method, a new inversion idea was proposed, and a fine-tuning strategy was introduced. Through the control of the self-constrained network, the inversion results were improved in the forward data fitting. At the same time, because of the introduction of a fine-tuning strategy, the inversion results could be optimized and improved. Through model testing, we verified the effectiveness of this method, and the inversion results showed good performance in model fitting and data fitting. Finally, the method was applied to the gravity data inversion of the Gonghe Basin in Qinghai Province, and reasonable results were obtained.
It is worth noting that the fine-tuning process was based on the pretrained network model, so the generalization and accuracy of the pretrained model must be guaranteed. This means that the number and richness of data sets for pretraining needs to be guaranteed. The method proposed in this paper is not only suitable for gravity inversion but also feasible for other geophysical methods. In addition, if there are other prior information constraints, they can be added to the proposed method.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}