
Performance Evaluation and Application Field Analysis of Precise Point Positioning Based on Different Real-Time Augmentation Information


Abstract
1. Introduction
2. Real-Time Augmentation Information Analyses
2.1. Real-Time Augmentation Information Acquisition
- (1)
- IGS real-time augmentation information.
- (2)
- PPP-B2b real-time augmentation information.
- (3)
- BDSBAS real-time augmentation information.
2.2. Real-Time Orbit and Clock Offset Recovery Method
2.2.1. Real-Time Orbit Recovery
- (1)
- IGS real-time orbit recovery
- (2)
- PPP-B2b real-time orbit recovery
- (3)
- BDSBAS real-time orbit recovery
2.2.2. Real-Time Clock Offset Recovery
- (1)
- IGS real-time clock offset recovery
- (2)
- PPP-B2b real-time clock offset recovery
- (3)
- BDSBAS real-time clock offset recovery
2.3. Real-Time Product Quality Analysis
2.3.1. Real-Time Orbit Accuracy Analysis
- (1)
- GPS orbit accuracy
- (2)
- BDS-3 orbit accuracy
2.3.2. Real-Time Clock Offset Accuracy Analysis
- (1)
- GPS clock offset accuracy
- (2)
- BDS-3 clock offset accuracy
3. Real-Time PPP Performance Evaluation
3.1. Positioning Accuracy Analysis Based on Real-Time Augmentation Information
3.1.1. RT PPP Theory and Processing Strategy
3.1.2. RT PPP Experimental Results and Analysis
3.2. Positioning Availability Analysis Based on Real-Time Augmentation Information
4. Application Field Analysis
5. Conclusions
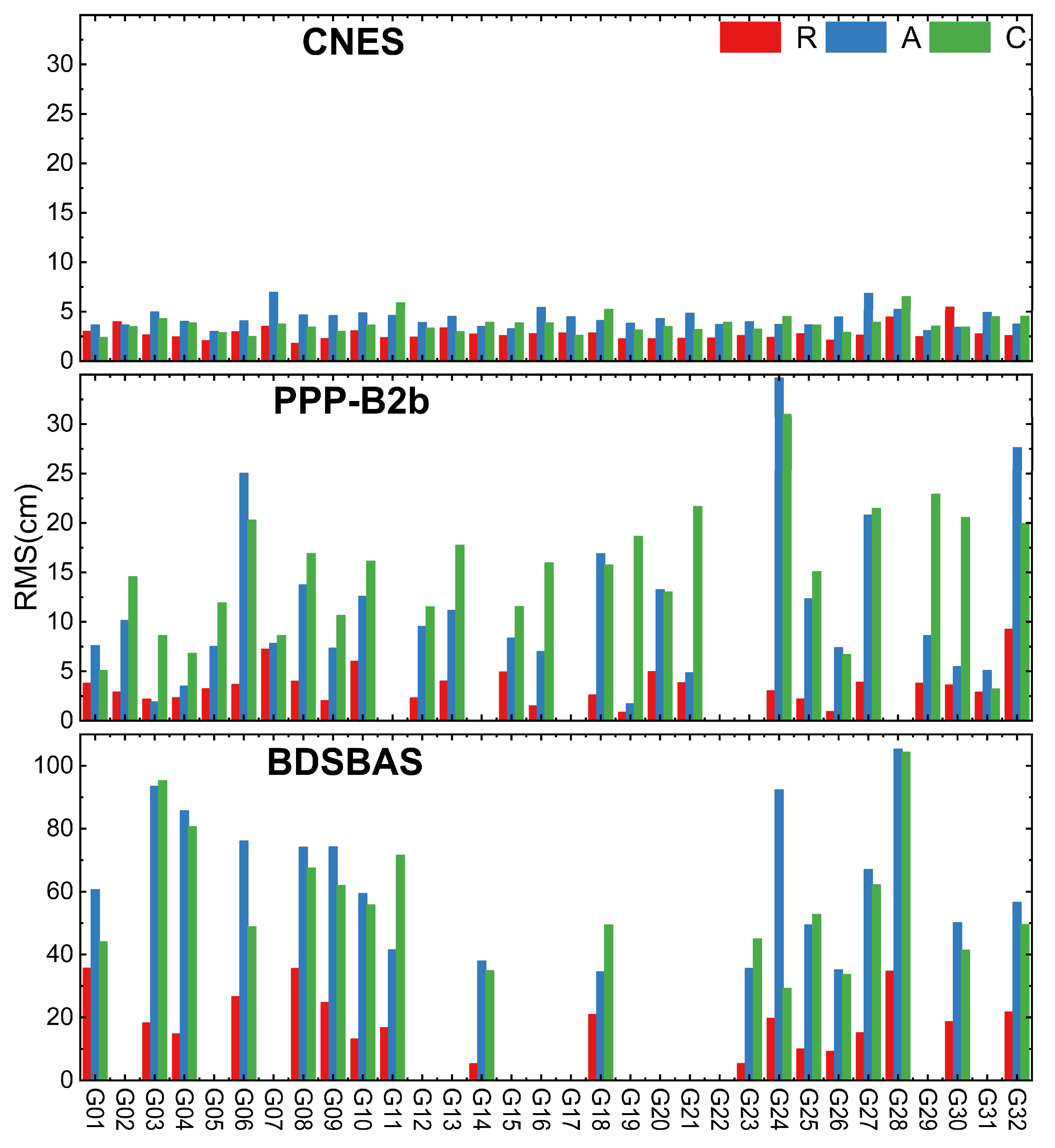
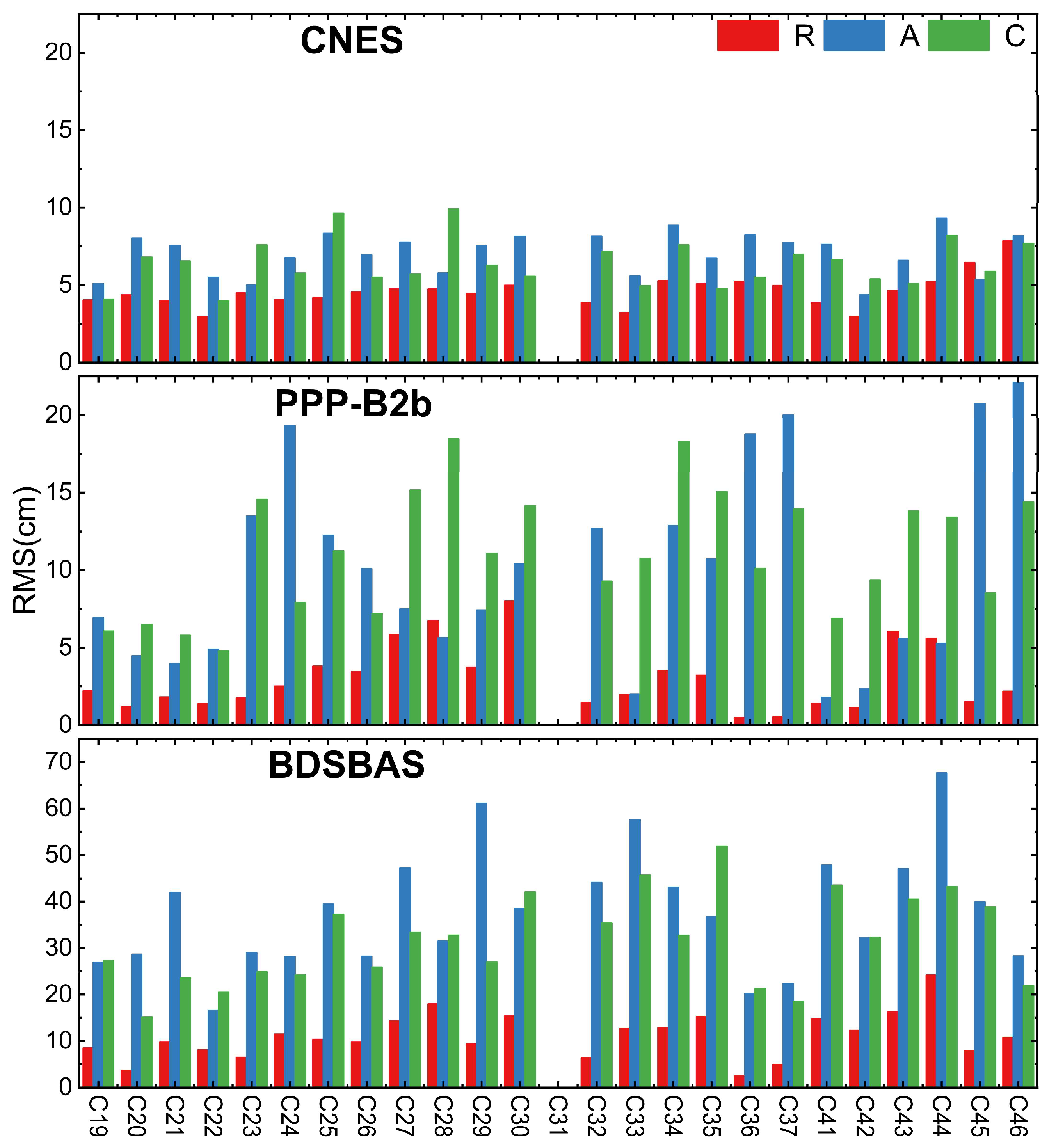
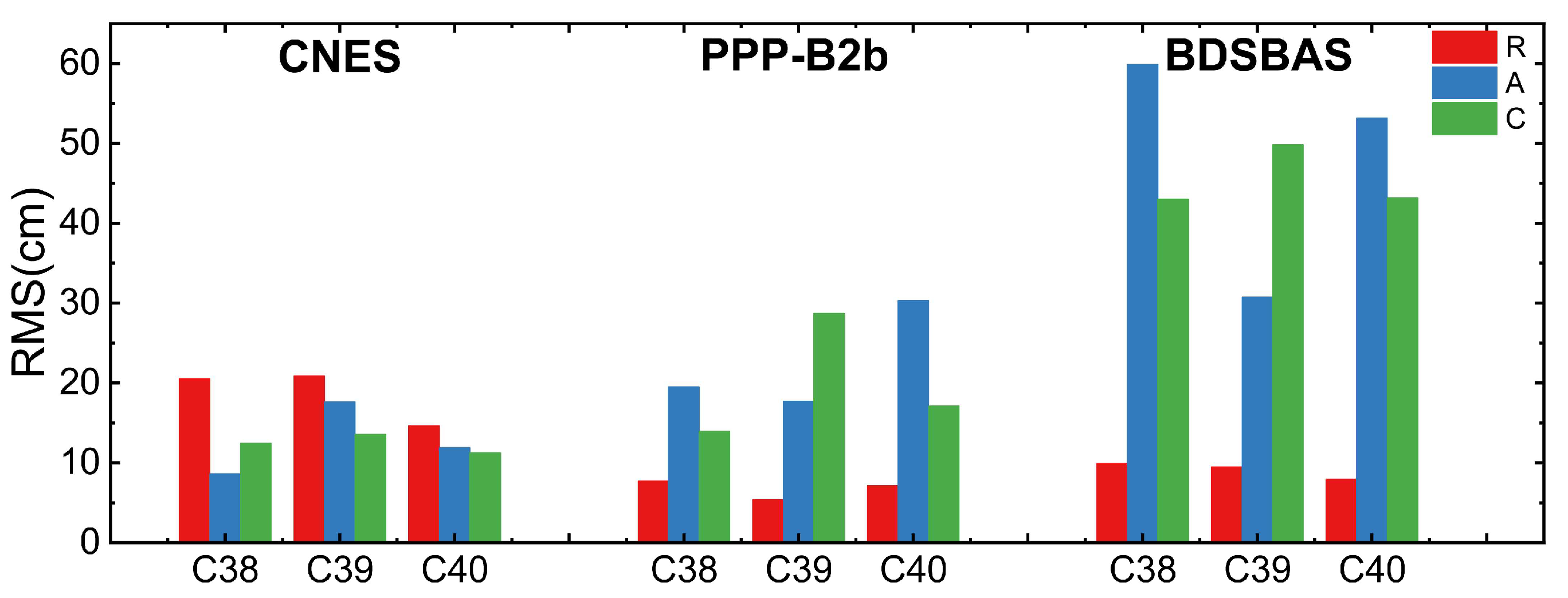
- (1)
- PPP-B2b and CNES RT orbit accuracy is consistent in the radial direction, PPP-B2b GPS RT orbit accuracy is marginally poorer than CNES, and BDS-3 orbit accuracy is slightly better than CNES but within 5 cm. PPP-B2b RT orbit accuracy is worse than CNES in the A and C direction, both are at the decimeter level. For CNES, except IGSO satellites, the orbit accuracy of other satellites is about centimeter-level. BDSBAS real-time orbit accuracy is worse than CNES and PPP-B2b, which reached the decimeter level.
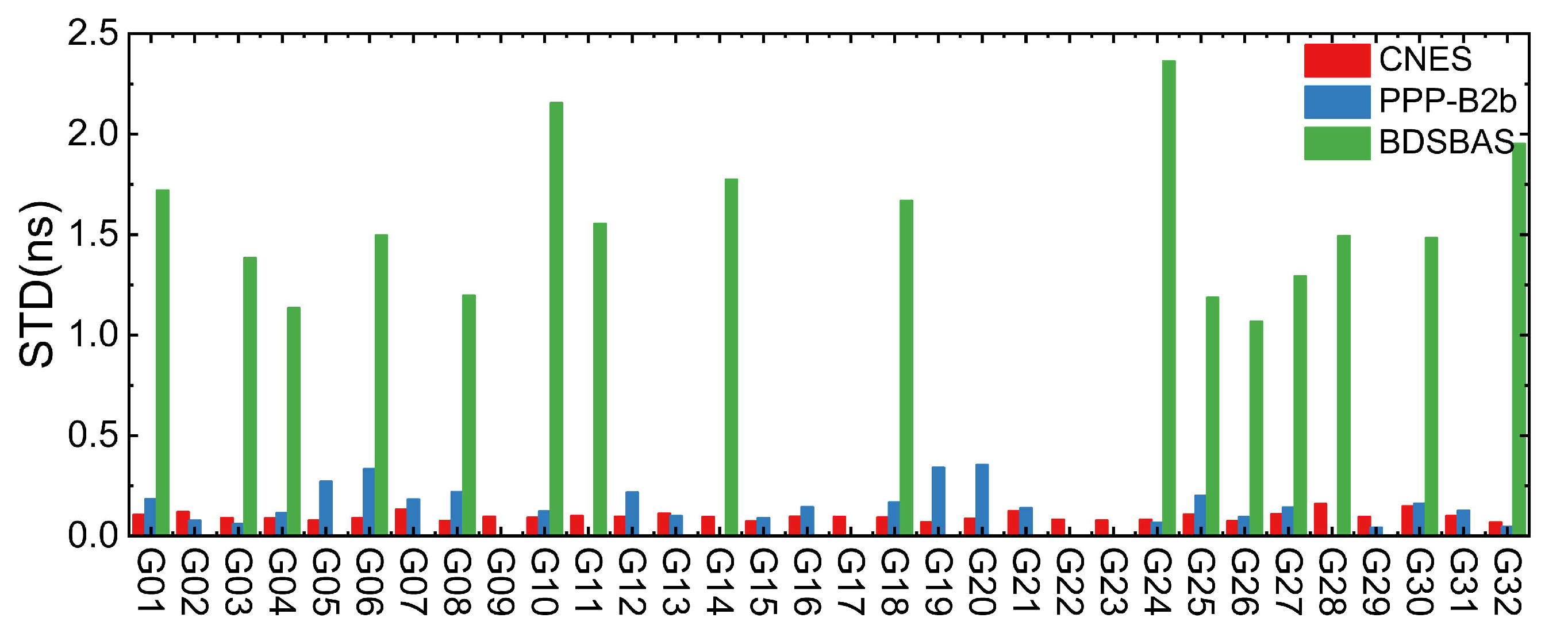
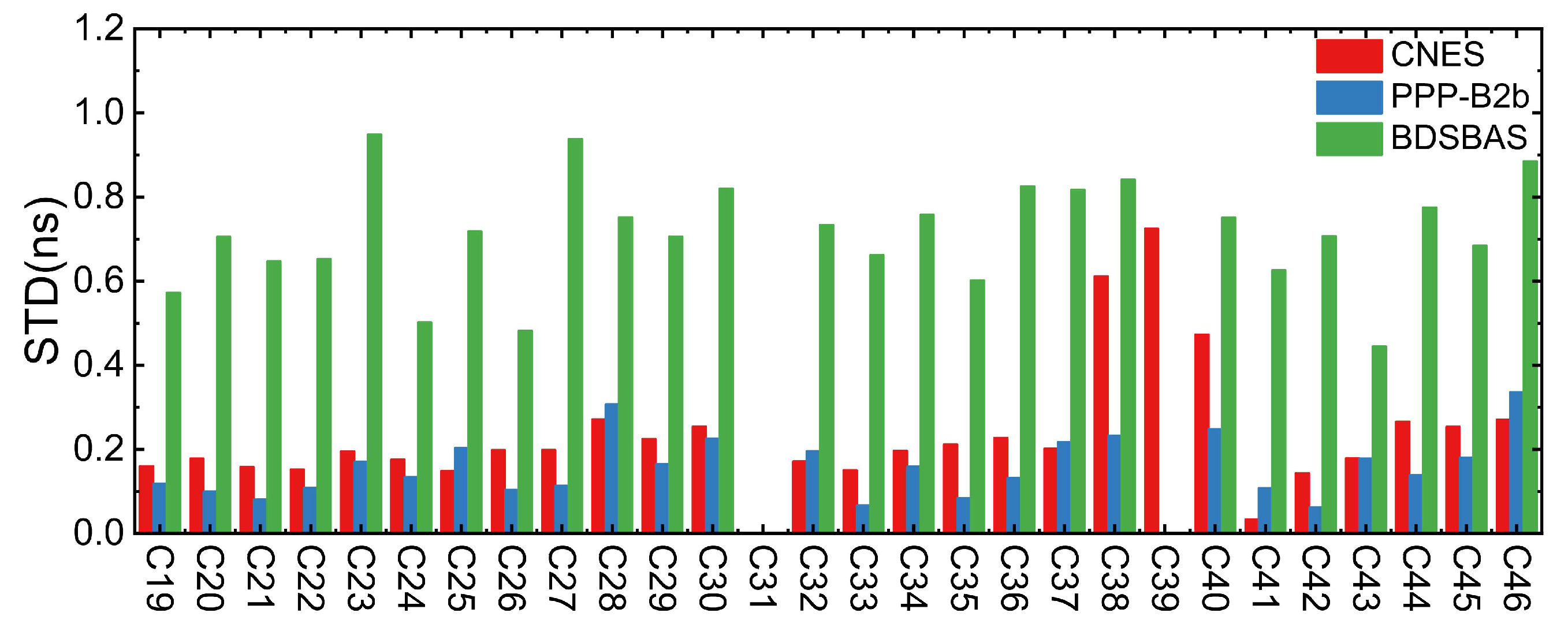
- (2)
- The performance of the CNES and PPP-B2b RT clock offset are consistent, the CNES GPS RT clock offset accuracy is marginally higher than that of PPP-B2b, and the BDS-3 real-time clock offset accuracy is marginally inferior to that of PPP-B2b, especially for the IGSO satellite. The BDSBAS RT clock offset accuracy is considerably inferior to that of CNES and PPP-B2b, but it has reached the sub-nanosecond level.
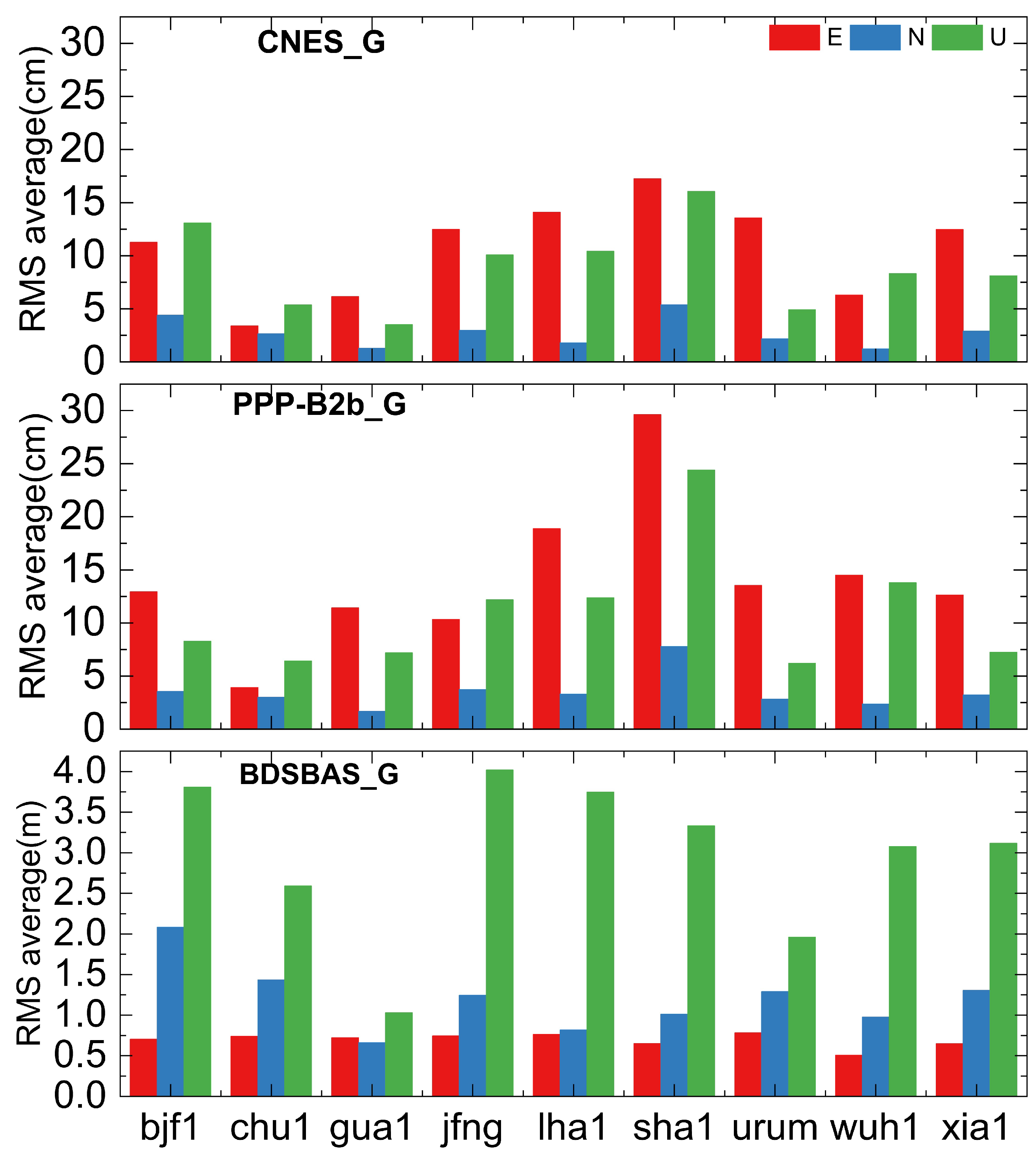
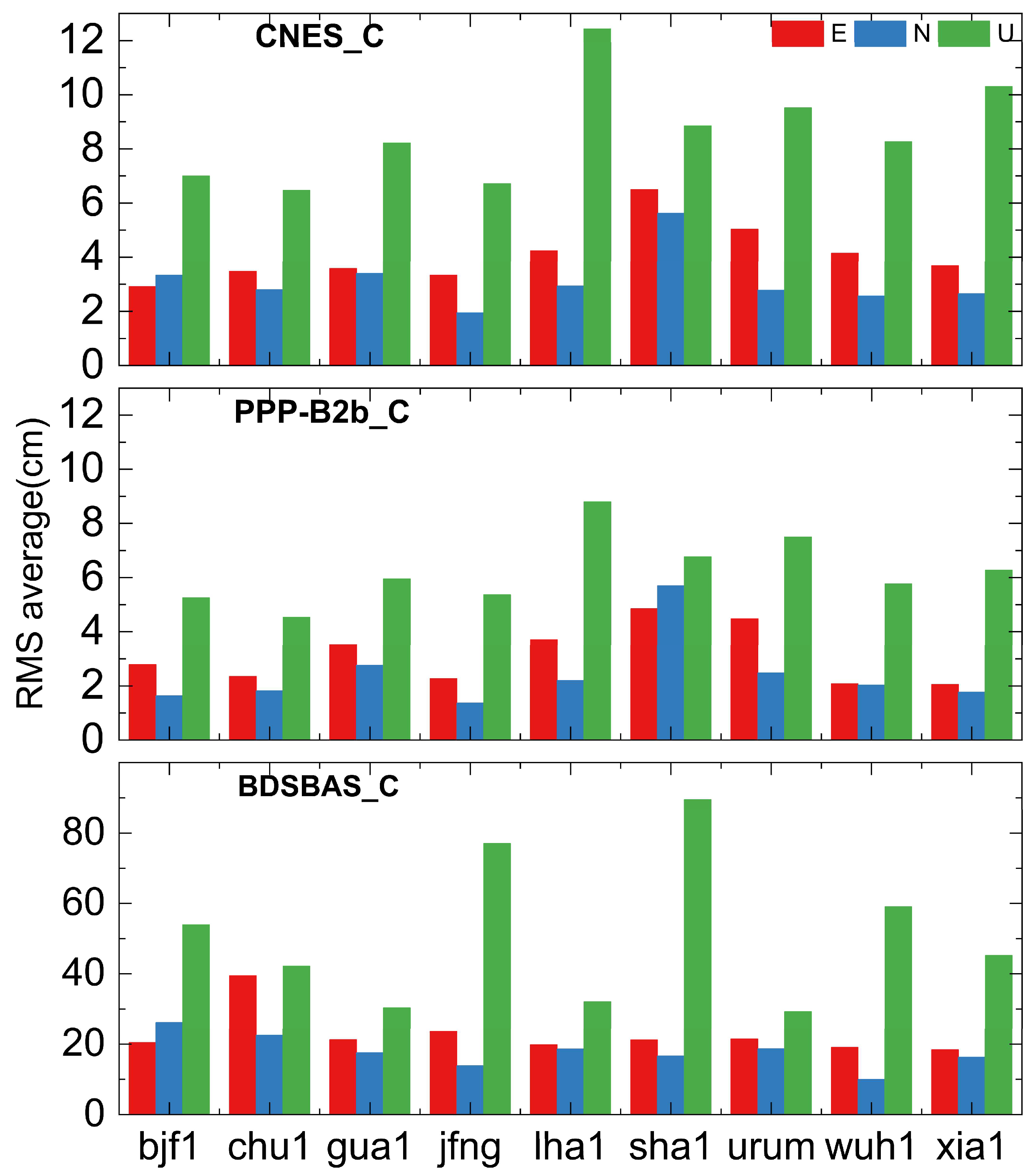
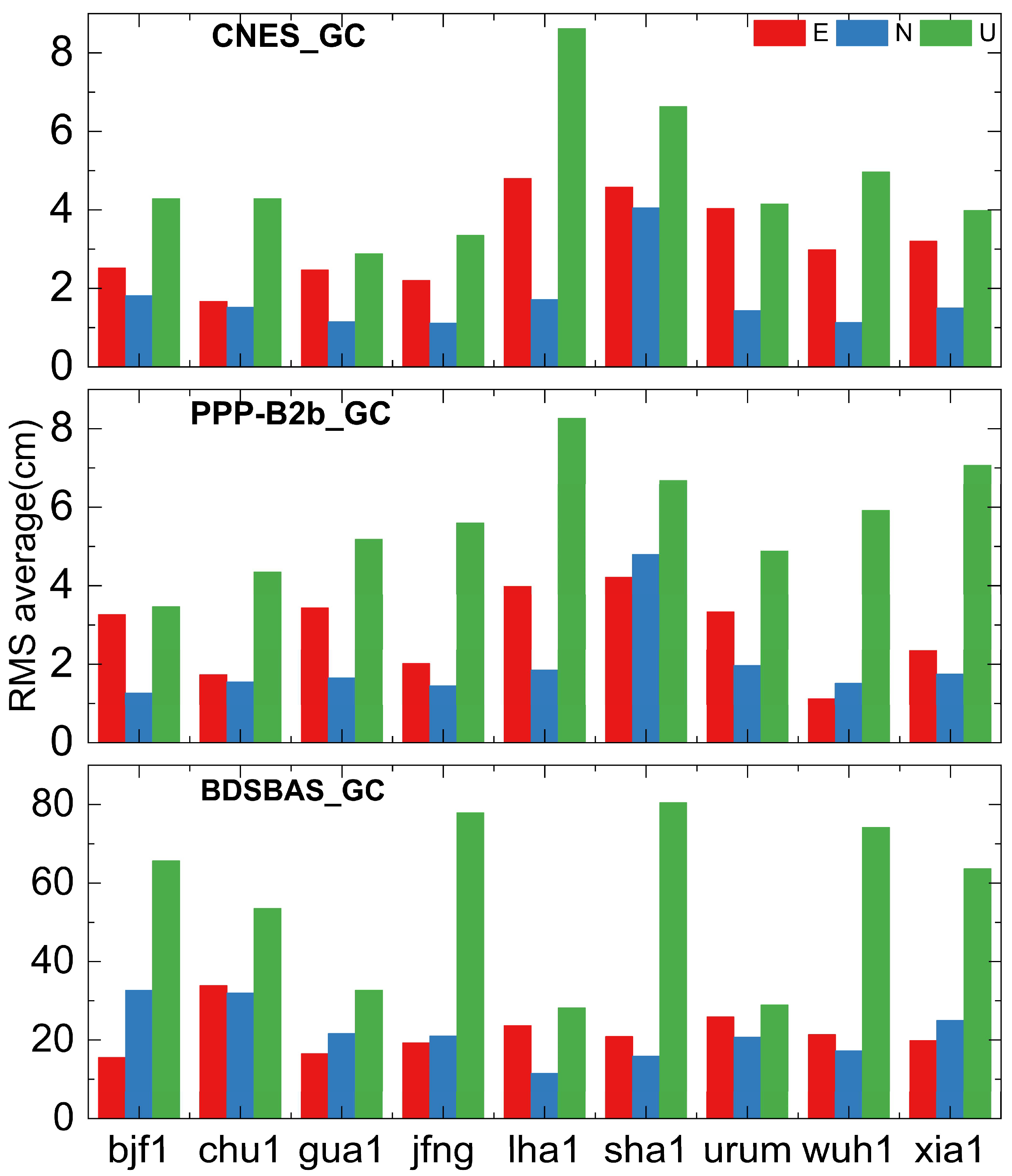
- (3)
- The RT PPP performance of BDS-3-only based on the PPP-B2b service is marginally greater than the CNES service and that of GPS-only and GPS/BDS-3 dual systems are marginally worse than CNES, but it still reaches centimeter level. The RT PPP performance of the BDSBAS service is at the decimeter level, except for the U component of GPS-only, which may be caused by the limited quantity of GPS satellites that can be corrected.
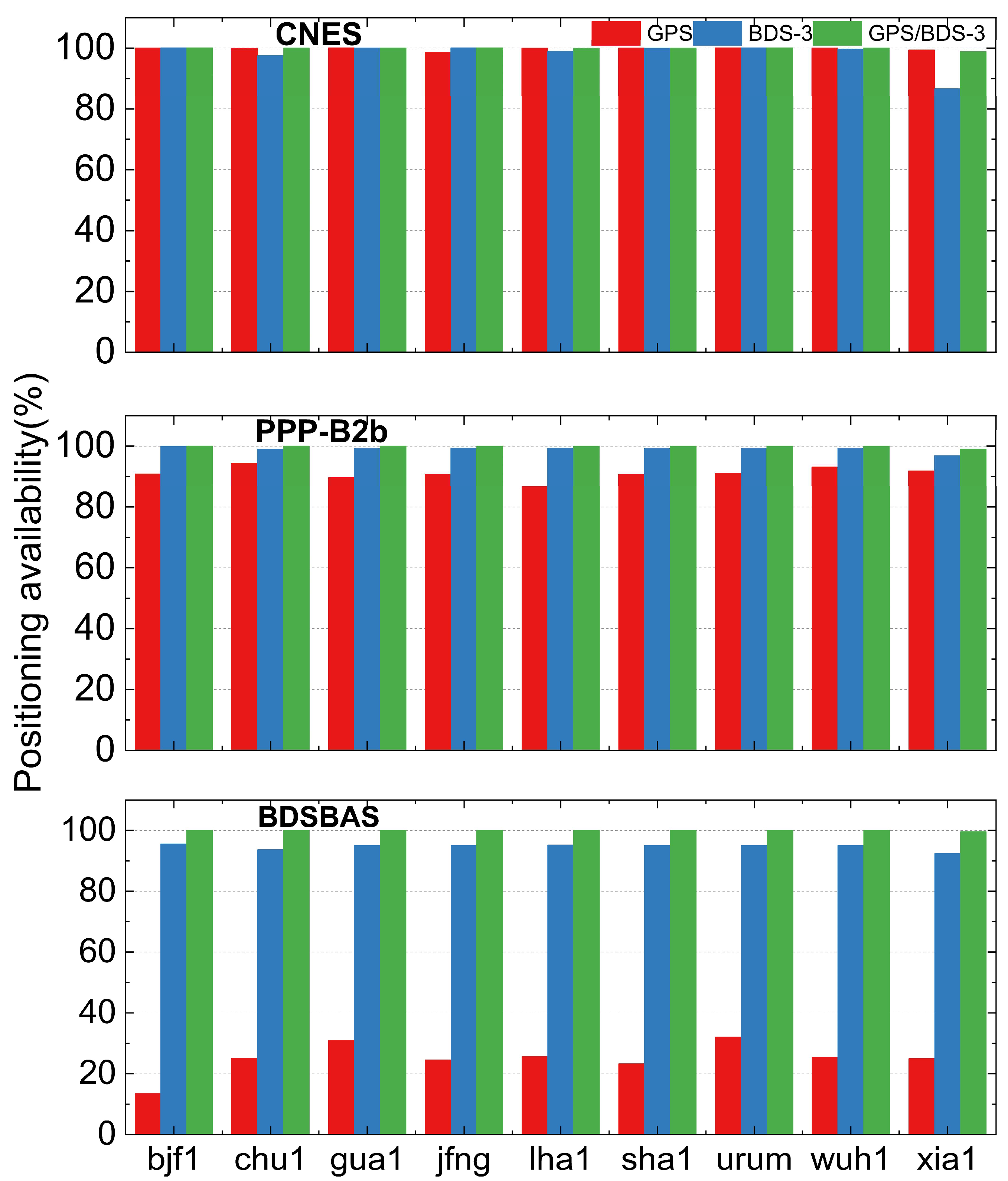
- (4)
- The RT PPP positioning accuracy and availability of GPS/BDS-3 and BDS-3-only are on par with CNES and PPP-B2b services. The acquisition of RT augmentation information is where the two services’ applications diverge most. The CNES RT service relies on an unobstructed network environment, while PPP-B2b only serves China and surrounding areas. For BDSBAS RT services, its positioning integrity and continuity have significant advantages, mainly applied in aviation and maritime fields.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, L.; Yue, F.; Miao, C. GPS/GLONASS /GALILEO Real-time service (RTS) product performance evaluation analysis. Navig. Position. Timing 2020, 7, 65–72. [Google Scholar]
- Wang, Z.; Li, Z.; Wang, L.; Wang, X.; Yuan, H. Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers. Int. J. Geo-Inf. 2018, 7, 85. [Google Scholar] [CrossRef]
- Lan, R.; Yang, C.; Zheng, Y.; Xu, Q.; Lv, J.; Gao, Z. Evaluation of BDS-3 B1C/B2b Single/Dual-Frequency PPP Using PPP-B2b and RTS SSR Products in Both Static and Dynamic Applications. Remote Sens. 2022, 14, 5835. [Google Scholar] [CrossRef]
- China Satellite Navigation Office. Beidou Navigation Satellite System Signal in Space Interface Control Document Precise Point Positioning Service Signal PPP-B2b (Version 1.0). Available online: http://www.beidou.gov.cn/xt/gfxz/202008/P020230516574071340728.pdf (accessed on 11 October 2023).
- China Satellite Navigation Office. Beidou Navigation Satellite System Signal in Space Interface Control Document Satellite Based Augmentation System Service Signal BDSBAS-B1C (Version 1.0). Available online: http://www.beidou.gov.cn/xt/gfxz/202008/P020200803362065480963.pdf (accessed on 11 October 2023).
- China Satellite Navigation Office. Interface Specification for Signal in Space of BeiDou Satellite-Based Augmentation System-Dual-Frequency Augmentation Service Signal BDSBAS-b2a. Available online: http://www.beidou.gov.cn/yw/xwzx/202212/W020221231599398885146.pdf (accessed on 11 October 2023).
- Zhao, S.; Yang, L.; Gao, Y. Analysis of GPS real-time precision single-point positioning performance based on SSR information. Geod. Geodyn. 2019, 39, 952–955. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, H.; Gao, Y.; Yao, Y.; Xu, C. Evaluation and Analysis of Real-time Precise Orbits and Clocks Products from Different IGS Analysis Centers. Adv. Space Res. 2018, 61, 2942–2954. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B.; Yuan, Y.; Li, M. Real-Time Precise Point Positioning (RTPPP) with Raw Observations and Its Application in Real-time Regional Ionospheric VTEC Modeling. J. Geod. 2018, 92, 1267–1283. [Google Scholar] [CrossRef]
- Lu, X.; Chen, L.; Shen, N.; Wang, L.; Jiao, Z.; Chen, R. Decoding PPP Corrections from BDS B2b Signals Using a Software-defined Receiver: An Initial Performance Evaluation. Sens. J. 2021, 21, 7871–7883. [Google Scholar] [CrossRef]
- Song, W.W.; Zhao, X.K.; Lou, Y.D.; Sun, W.; Zhao, Z. Performance Evaluation of BDS-3 PPP-B2b Service. Geomat. Inf. Sci. Wuhan Univ. 2023, 48, 408–415. [Google Scholar]
- Huang, L.W.; Meng, X.W. Accuracy Analysis of Precise Point Positioning Using BDS-3 PPP-B2b Signals. J. Geod. Geodyn. 2021, 41, 516–519. [Google Scholar] [CrossRef]
- Xu, Y.; Yang, Y.; Li, J. Performance evaluation of BDS-3 PPP-B2b precise point positioning service. GPS Solut 2021, 25, 142. [Google Scholar] [CrossRef]
- Tao, J.; Liu, J.; Hu, Z.; Zhao, Q.; Chen, G.; Ju, B. Initial Assessment of the BDS-3 PPP-B2b RTS Compared with the CNES RTS. GPS Solut. 2021, 25, 131. [Google Scholar] [CrossRef]
- Ren, Z.; Gong, H.; Peng, J.; Tang, C.; Huang, X.; Sun, G. Performance Assessment of Real-Time Precise Point Positioning Using BDS PPP-B2b Service Signal. Adv. Space Res. 2021, 68, 3242–3254. [Google Scholar] [CrossRef]
- Nie, Z.; Xu, X.; Wang, Z.; Du, J. Initial Assessment of BDS PPP-B2b Service: Precision of Orbit and Clock Corrections, and PPP Performance. Remote Sens. 2021, 13, 2050. [Google Scholar] [CrossRef]
- Guo, F.; Zhou, C.; Wu, Z.H. BDS-3 PPP-B2b signal accuracy and precision single-point positioning performance evaluation. J. Nanjing Univ. Inf. Sci. Technol. (Nat. Sci. Ed.) 2022, 14, 658–666. [Google Scholar]
- Liu, Y.; Yang, C.; Zhang, M. Comprehensive Analyses of PPP-B2b Performance in China and Surrounding Areas. Remote Sens. 2022, 14, 643. [Google Scholar] [CrossRef]
- Tang, C.; Hu, X.; Chen, J.; Liu, L.; Zhou, S.; Guo, R.; Li, X.; He, F.; Liu, J.; Yang, J. Orbit determination, clock estimation and performance evaluation of BDS-3 PPP-B2b service. J. Geod. 2022, 96, 60. [Google Scholar] [CrossRef]
- Tang, J.; Lyu, D.; Zeng, F.; Ge, Y.; Zhang, R. Comprehensive Analysis of PPP-B2b Service and Its Impact on BDS-3/GPS Real-Time PPP Time Transfer. Remote Sens. 2022, 14, 5366. [Google Scholar] [CrossRef]
- Geng, T.; Li, Z.; Xie, X.; Liu, W.; Li, Y.; Zhao, Q. Real-time Ocean precise point positioning with BDS-3 service signal PPP-B2b. Measurement 2022, 203. [Google Scholar] [CrossRef]
- Niu, F. Theory and Technique on GNSS Integrity Augment. Ph.D. Thesis, PLA Information Engineering university, Zhengzhou, China, 2008. [Google Scholar]
- Cai, H.L.; Meng, Y.N.; Geng, C.J.; Gao, W.G.; Zhang, T.Q.; Li, G.; Shao, B.; Xin, J.; Lu, H.Y.; Mao, Y.; et al. BDS-3 performance assessment: PNT, SBAS, PPP, SMC and SAR. Acta Geod. Cartogr. Sin. 2021, 50, 427–435. [Google Scholar]
- Chen, J.P.; Hu, Y.F.; Zhang, Y.Z.; Zhou, J.H. Preliminary evaluation of performance improvement of Beidou satellite-based augmentation system. J. Tongji Univ. (Nat. Sci.) 2017, 45, 1075–1082. [Google Scholar] [CrossRef]
- Zhang, J.; Shao, B. Regional Single Frequency Service Availability Evaluation of BDSBAS. Navig. Position. Timing 2021, 8, 137–145. [Google Scholar]
- Cao, Y.; Chen, J.; Liu, L.; Hu, X.; Liu, Y.; Xin, J.; Zhao, L.; Tian, Q.; Zhou, S.; Wu, B. Development Status and Service Performance Preliminary Analysis for BDSBAS. Remote Sens. 2022, 14, 4314. [Google Scholar] [CrossRef]
- Yang, Y.; Ding, Q.; Gao, W.; Li, J.; Xu, Y.; Sun, B. Principle and performance of BDSBAS and PPP-B2b of BDS-3. Satell Navig. 2022, 3, 5. [Google Scholar] [CrossRef]
- Yao, Y.; He, Y.; Yi, W.; Song, W.; Cao, C.; Chen, M. Method for evaluating real-time GNSS satellite clock products. GPS Solut. 2017, 21, 1417–1425. [Google Scholar] [CrossRef]
- Yue, F. Research on GPS/BDS-3 Precise Point Positioning Technology Based on Real-Time Enhanced Information. Master’s Thesis, Chang’an University, Xi’an, China, 2022. [Google Scholar]
- Xin, J.; Chen, Q.; Guo, R. Basic navigation message parameters comparison between BDS-2 and BDS-3. Sci. Surv. Map 2020, 45, 32–38. [Google Scholar]
- Yuan, H.J.; Zhang, Z.T.; He, X.F.; Xu, T.; Xu, X. Stability Analysis of BDS-3 Satellite Differential Code Bias and Its Impacts on Single Point Positioning. Geomat. Inf. Sci. Wuhan Univ. 2023, 48, 425–432. [Google Scholar] [CrossRef]
- Zhou, F.; Dong, D.N. GAMP: An Open-Source Software of Multi-GNSS Precise Point Positioning Using Undifferenced and Uncombined Observations. Available online: https://www.ngs.noaa.gov/gps-toolbox/GAMP/GAMP.zip (accessed on 9 July 2021).
- Ding, H.; Sun, F.P.; Men, B.H.; Man, X.S.; Li, Y.P.; Ye, X.F. Performance Analysis of Multi-GNSS Precise Point Positioning. J. Geomat. Sci. Technol. 2016, 33, 21–26. [Google Scholar]
- Li, X.X.; Ge, M.R. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- China Satellite Navigation Office. 10 Application Scenarios of BDS in Africa. Available online: http://www.beidou.gov.cn/xt/gfxz/202008/P020211105587887134672.pdf (accessed on 11 October 2023).
- China Satellite Navigation Office. Applications of the BeiDou Navigation Satellite System (December 2018). Available online: http://www.beidou.gov.cn/xt/gfxz/201906/P020190605488535070471.pdf (accessed on 11 October 2023).
- China Satellite Navigation Office. Development of the BeiDou Navigation Satellite System (Version 4.0). Available online: http://www.beidou.gov.cn/xt/gfxz/201912/P020191227430565455478.pdf (accessed on 11 October 2023).
- China Satellite Navigation Office. Beidou Navigation Satellite System Open Service Performance Standard (Version 3.0). Available online: http://www.beidou.gov.cn/xt/gfxz/202105/P020210526216231136238.pdf (accessed on 11 October 2023).
- Zhang, X.H.; Li, X.X.; Li, P. Typical applications of precision single point positioning technology. In GNSS Precise Point Positioning Theory, Methods and Applications, 2nd ed.; Yang, Y.X., Wei, B.G., Eds.; National Defense industry Press: Beijing, China, 2021; Volume 3, pp. 300–336. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IOD Type | Message Type |
|---|---|
| IODSSR | 1, 2, 3, and 4 |
| IODP | 1 and 4 |
| IODCorr | 2 and 4 |
| IODN | 2 and broadcast ephemeris |
| Project | Processing Strategies |
|---|---|
| Solution type | Dual-frequency static PPP (GPS (L1 + L2)/BDS-3 (B1I + B3I)) |
| Estimator | Kalman filter |
| Observations | Carrier phase and code observation |
| Sample | 30 s |
| Cut-off angle | 10 o |
| Stochastic model | Elevation angle weighting model |
| Ionospheric delay | Ionospheric-free combination |
| Tropospheric delay | Dry component: SAAS + GMF model [29] |
| Wet component: random walk estimation | |
| Relativistic effect | Model correction [29] |
| Receiver antenna phase center | Igs20.atx file correction (BDS-3 replaced by PCO of GPS) |
| Phase windup | Model correction [29] |
| Satellite orbit/clock offset Phase ambiguity | CNES, PPP-B2b, and BDSBAS products Float |
| Augmentation Information Source | Broadcast Method | Service Area | Tracking Station Network | Spatial-Temporal Reference |
|---|---|---|---|---|
| CNES RTS | Internet | Global | Global | WGS84/GPST |
| PPP-B2b | GEO satellites | China and surrounding regions | Regional + inter-satellite links | BDCS/BDT |
| BDSBAS | GEO satellites | China and surrounding regions | Regional | BDCS/BDT |
| Category | Application | Accuracy (RMS) | Coverage Area | Availability |
|---|---|---|---|---|
| Environmental Protection | Environmental Monitoring, Inspection | 0.5–2 m | Protected Areas | 95% |
| Agriculture | Agricultural Machinery Autonomous Driving | 0.1 m | Cultivated Areas | 99% |
| Railways | Vehicle Control, Automatic Maintenance Inspection | 0.1 m | Railway Lines | 99.5% |
| Highways | Maintenance Inspection, Vehicle Management | 0.1 m | Highways | 99.5% |
| Emergency Rescue | Emergency Communication | 0.1 m | Production Areas | 98% |
| Municipal | Bus Dispatch and Management | 0.5 m | Urban Areas | 98% |
| Tourism | Tourist Guidance | 1.0 m | Scenic Areas | 95% |
| Surveying and Mapping | Surveying, Engineering Measurement | 0.02 m | Entire Area | 98% |
| Aviation | Aircraft Landing Guidance, Route Planning | 4 m | Airport Areas | 99% |
| Maritime | Ship Entry and Exit Guidance, Route Planning | 10 m | Port Areas | 99% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, M.; Wang, L.; Xie, W.; Yue, F.; Cui, B. Performance Evaluation and Application Field Analysis of Precise Point Positioning Based on Different Real-Time Augmentation Information. Remote Sens. 2024, 16, 1349. https://doi.org/10.3390/rs16081349
Wu M, Wang L, Xie W, Yue F, Cui B. Performance Evaluation and Application Field Analysis of Precise Point Positioning Based on Different Real-Time Augmentation Information. Remote Sensing. 2024; 16(8):1349. https://doi.org/10.3390/rs16081349
Chicago/Turabian StyleWu, Mengjun, Le Wang, Wei Xie, Fan Yue, and Bobin Cui. 2024. "Performance Evaluation and Application Field Analysis of Precise Point Positioning Based on Different Real-Time Augmentation Information" Remote Sensing 16, no. 8: 1349. https://doi.org/10.3390/rs16081349
APA StyleWu, M., Wang, L., Xie, W., Yue, F., & Cui, B. (2024). Performance Evaluation and Application Field Analysis of Precise Point Positioning Based on Different Real-Time Augmentation Information. Remote Sensing, 16(8), 1349. https://doi.org/10.3390/rs16081349