
Separation of Multicomponent Micro-Doppler Signal with Missing Samples

 , , , , and
, , , , and
Abstract
1. Introduction
- (1)
- We propose two algorithms to solve the alternate iteration framework. The first algorithm uses the iteratively reweighted least squares (IRLS), Tikhonov regularization, and the matching pursuit principle to extract signal components, regularize the complex-valued differential (CD) operator, and calculate the optimization parameters, respectively.
- (2)
- To improve the accuracy of extracting signal components, the second algorithm employs the alternating direction method of multipliers (ADMM), iterative Tikhonov regularization, and the fixed-point iteration principle to extract signal components, regularize the CD operator, and calculate the optimization parameters, respectively.
- (3)
- Furthermore, an adaptive parameter updating method is proposed for iterative Tikhonov regularization.
2. Signal Model and Problem Formulation
3. Algorithm Design
| Algorithm 1 The framework of the proposed method |
| Initialization , , , , , ; |
| Repeat |
| Update regularization parameters and |
| Until |
3.1. IRLS-Based Algorithm
| Algorithm 2 IRLS-based algorithm |
| Input: , , , , , . |
| do |
| Initialization |
| while do |
| end while |
| update the residue signal |
| end while |
| Output: reconstructed components |
3.2. ADMM-Based Algorithm
| Algorithm 3 ADMM-based algorithm |
| Input: , , , , , , . |
| do |
| Initialization |
| do |
| end while |
| update the residue signal |
| end while |
| Output: reconstructed components |
4. Experimental Results
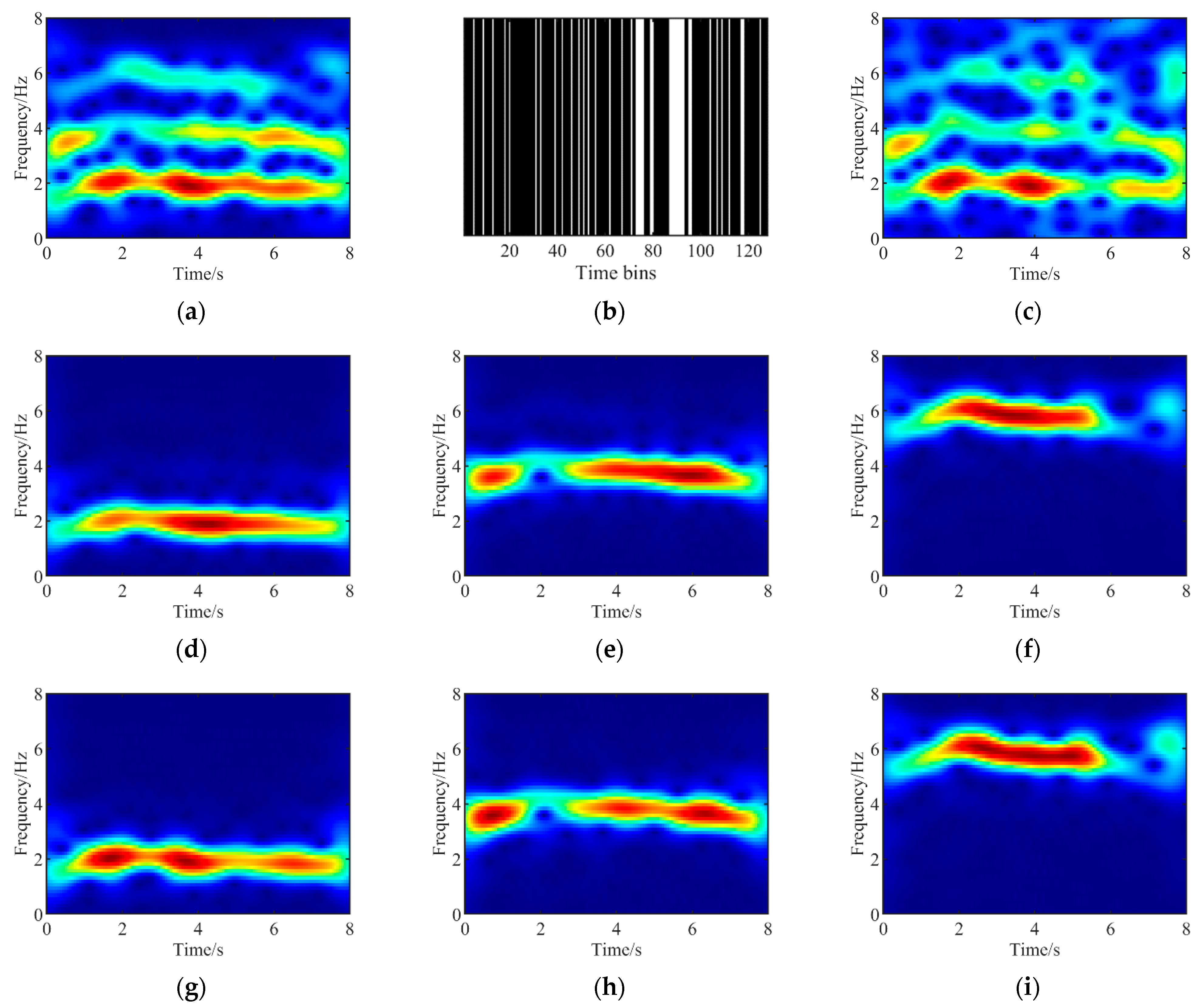
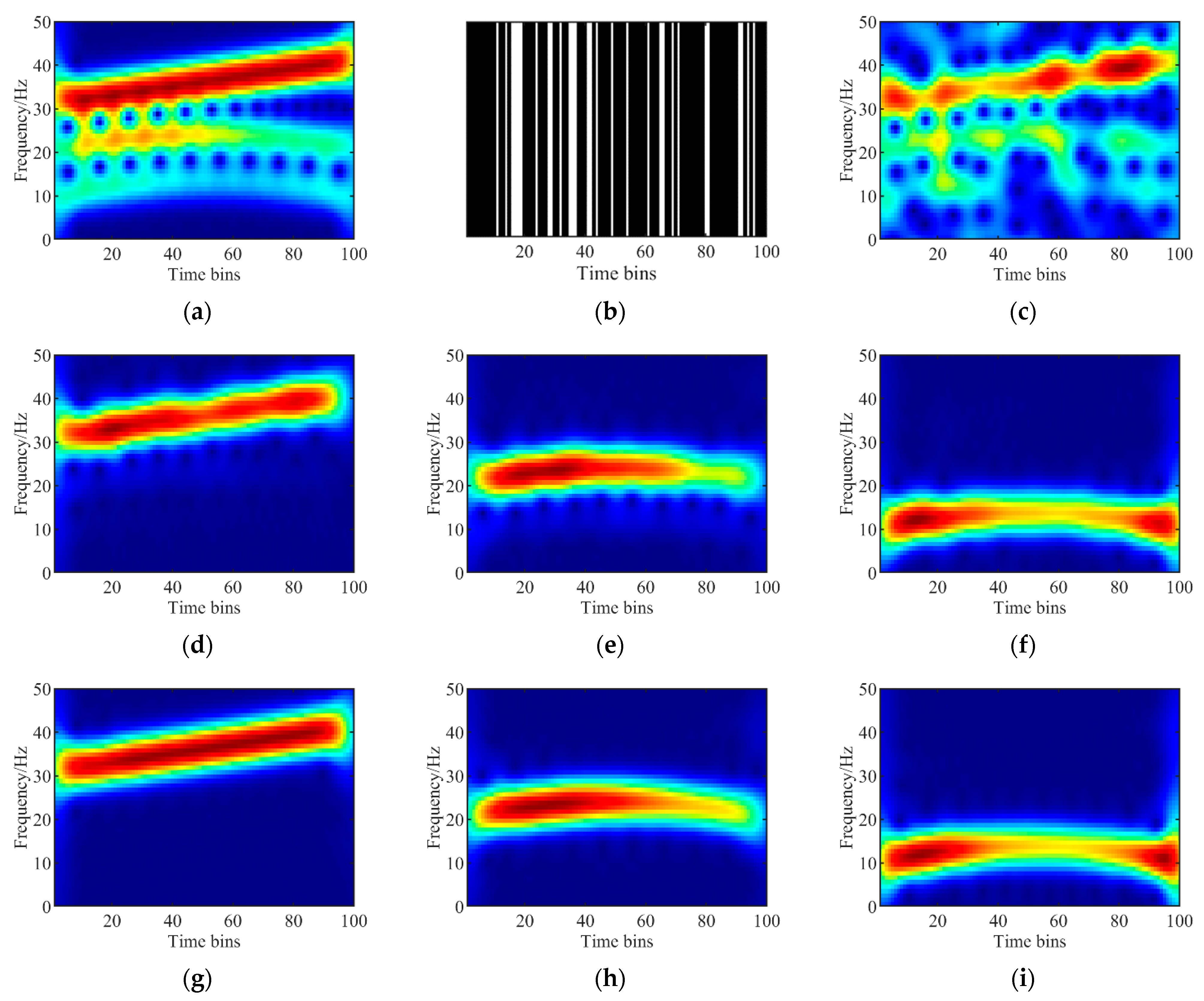
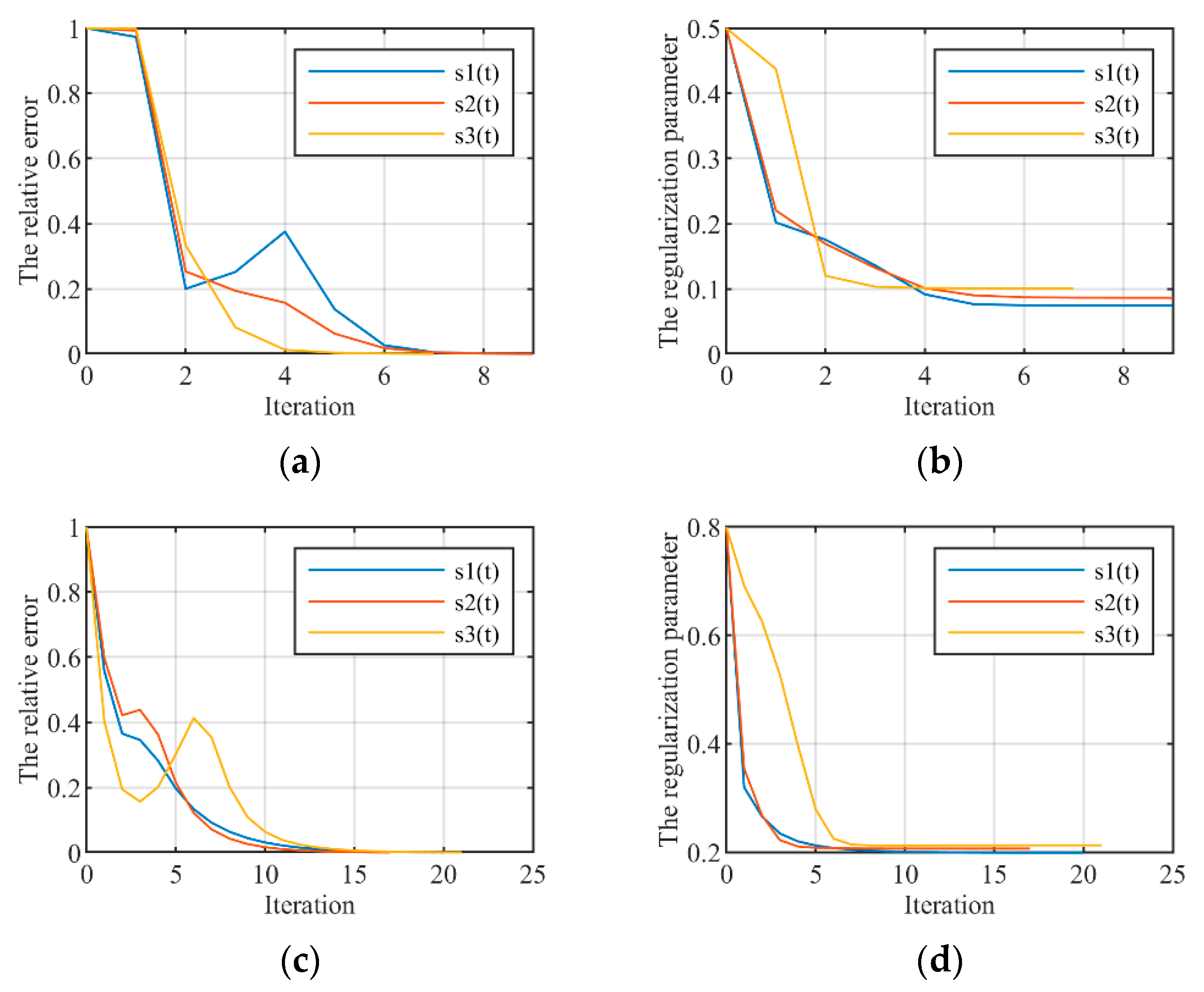
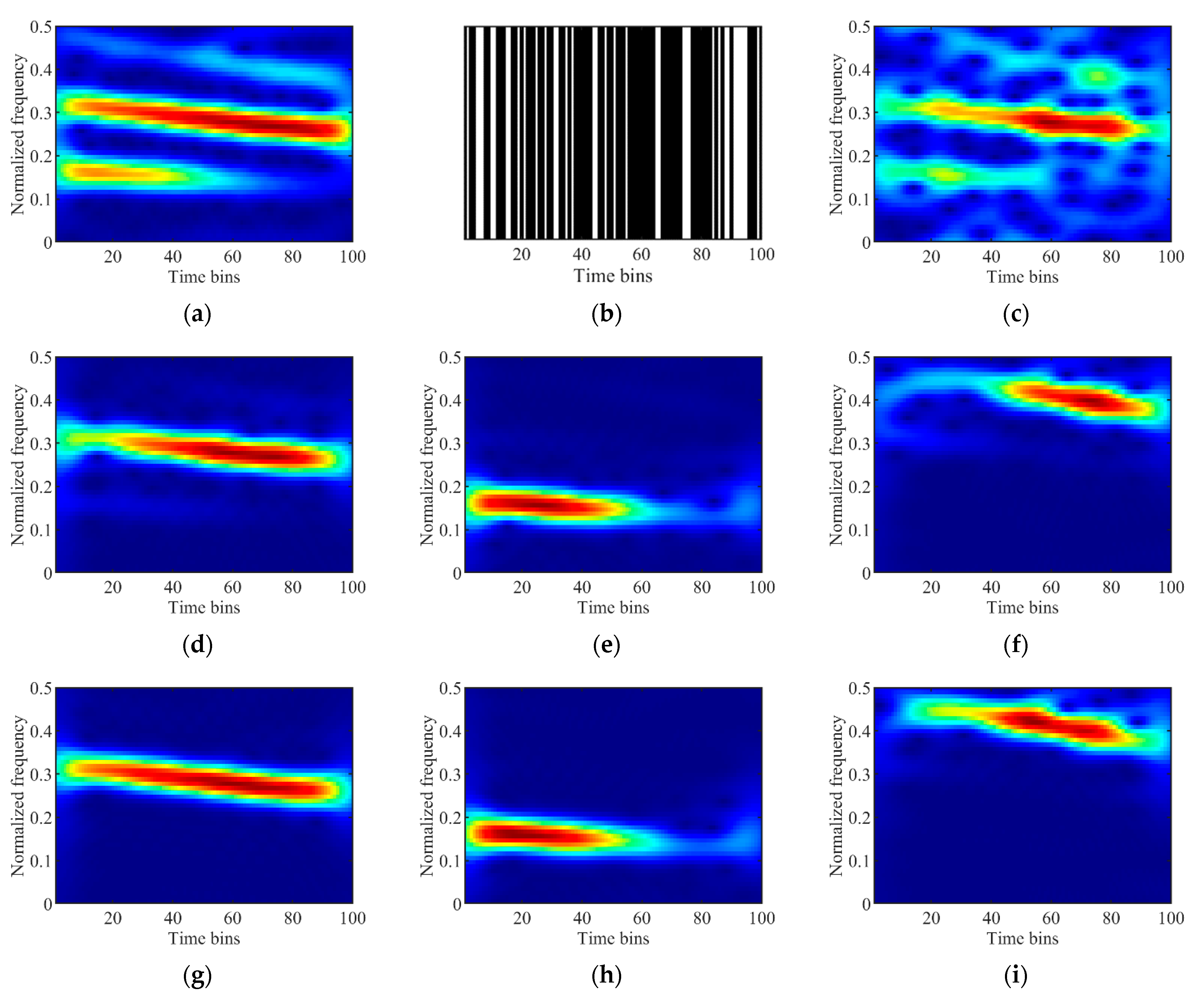
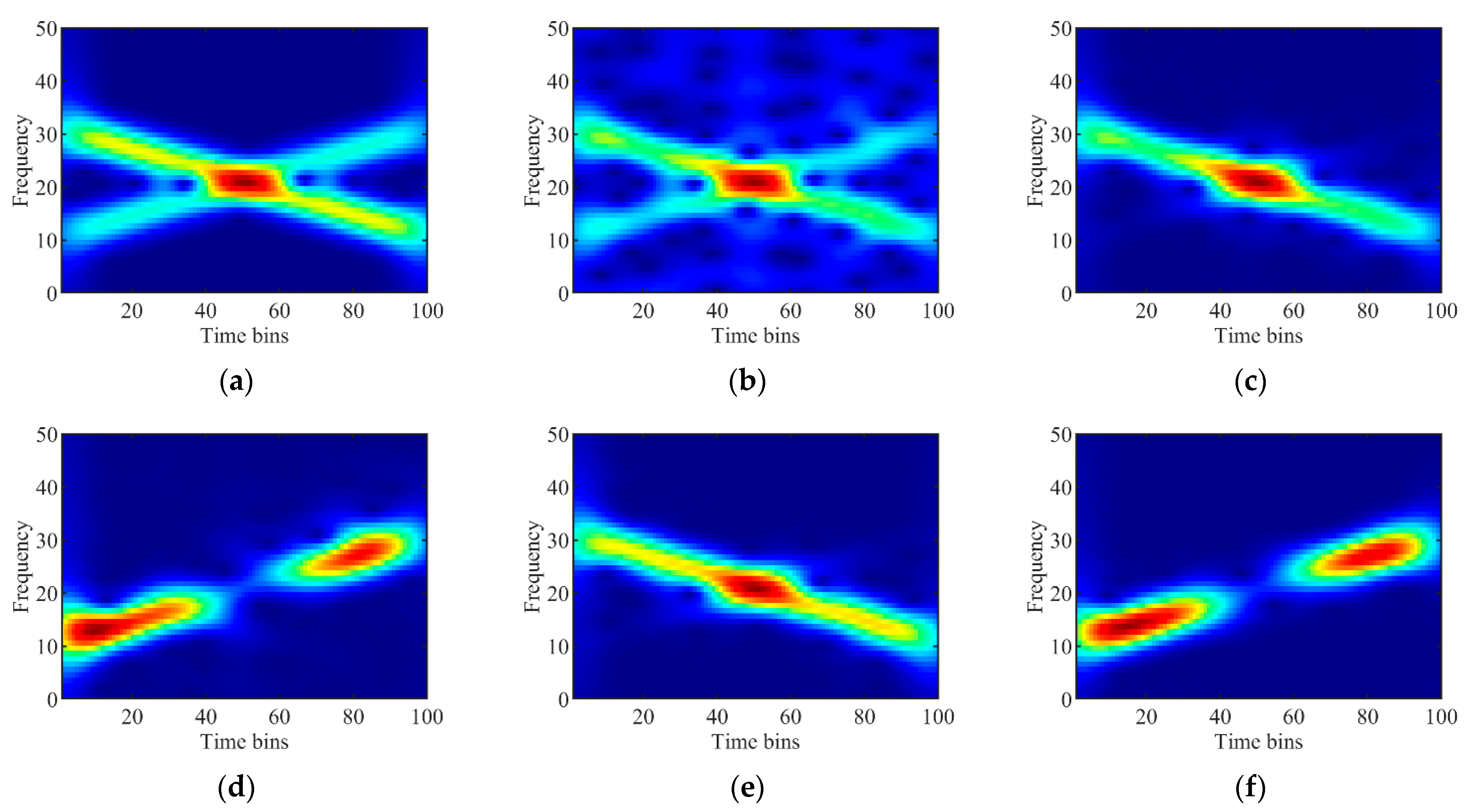
4.1. Simulated Data
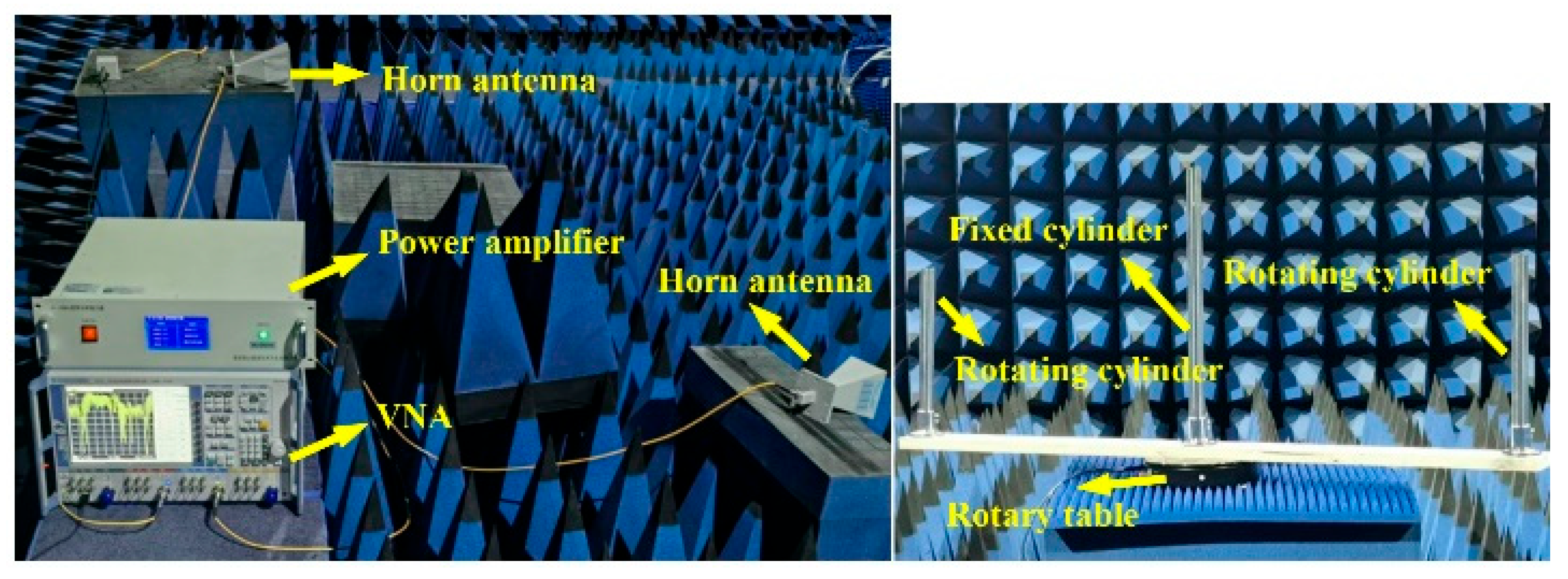
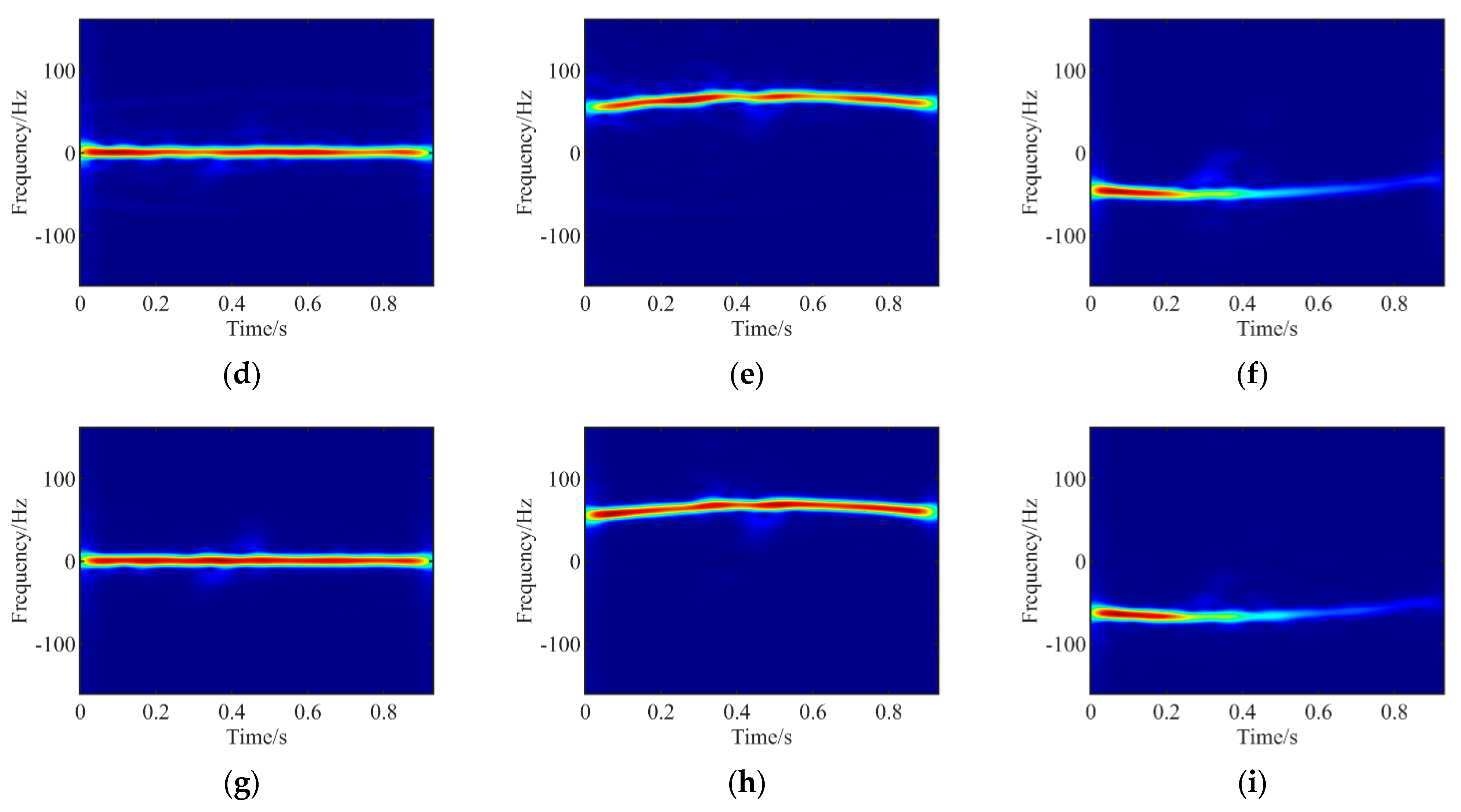
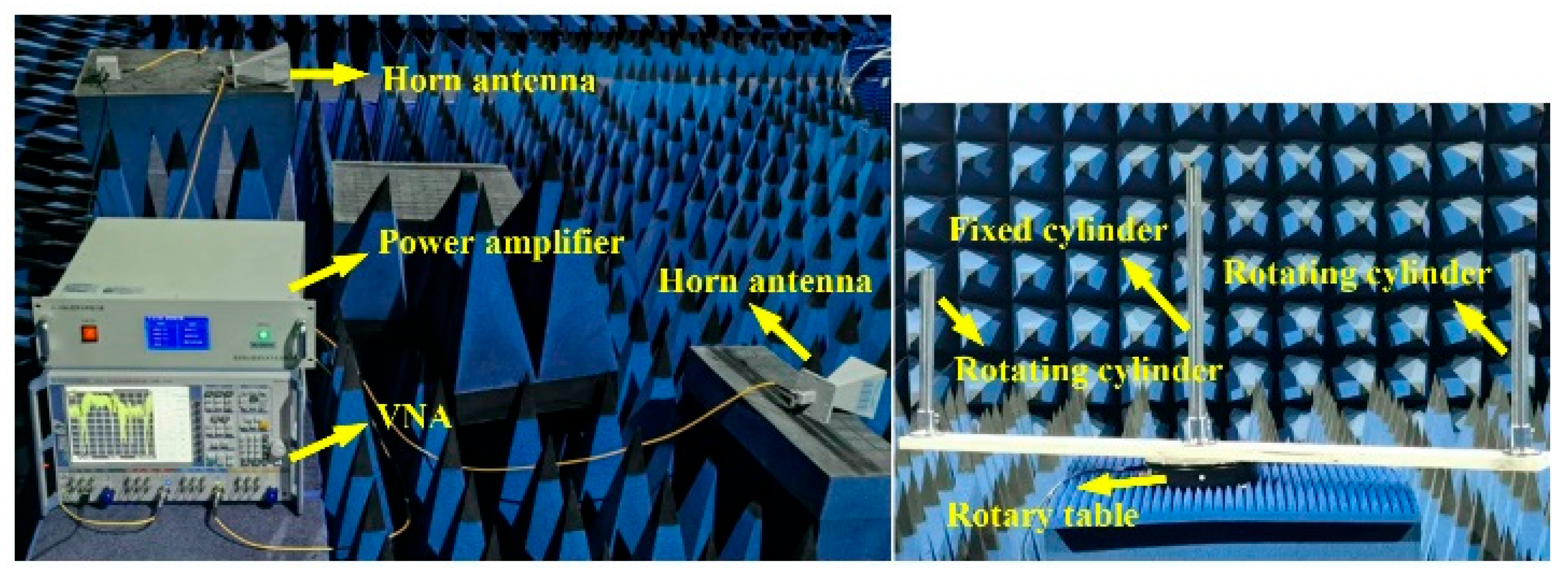
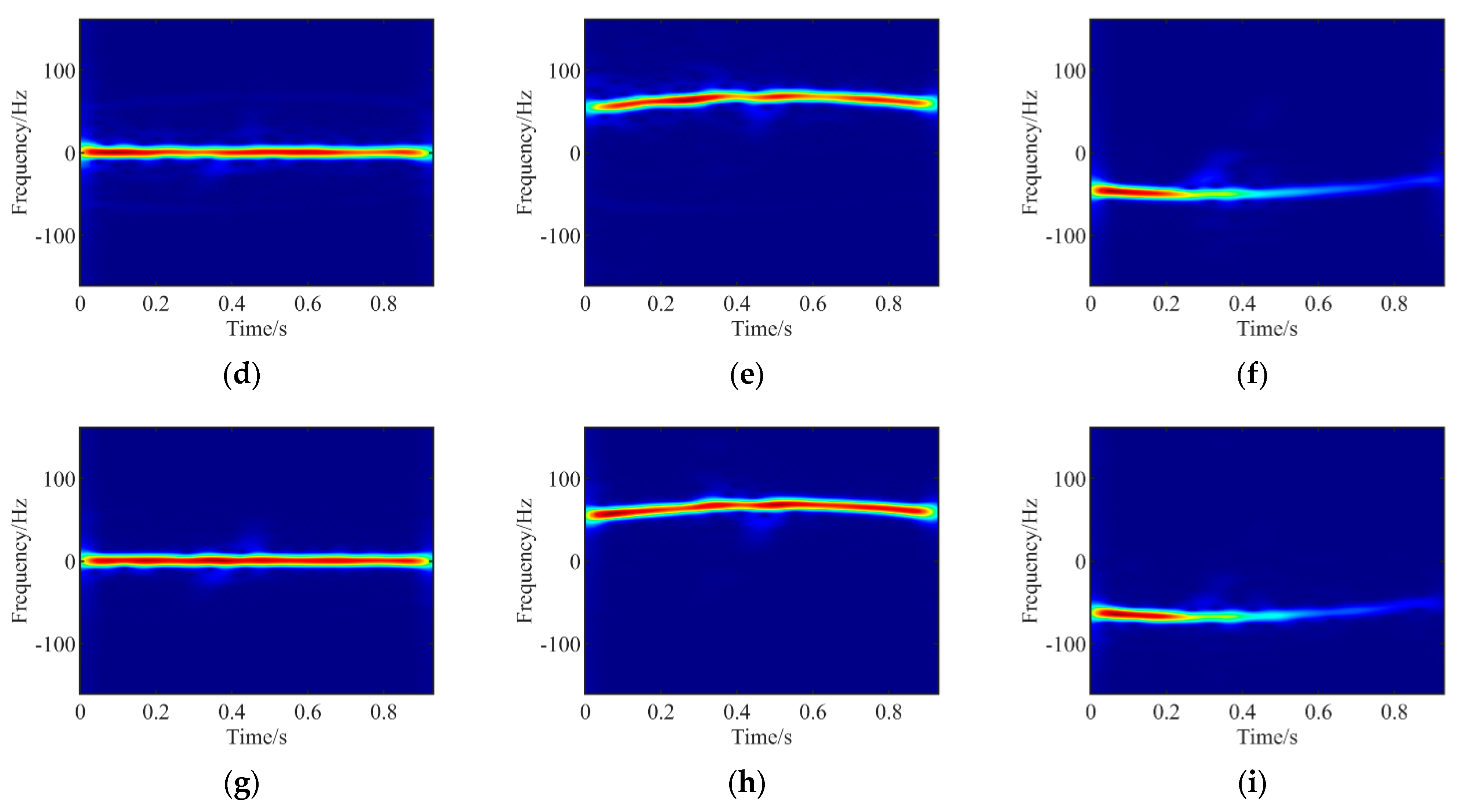
4.2. Experimental Data
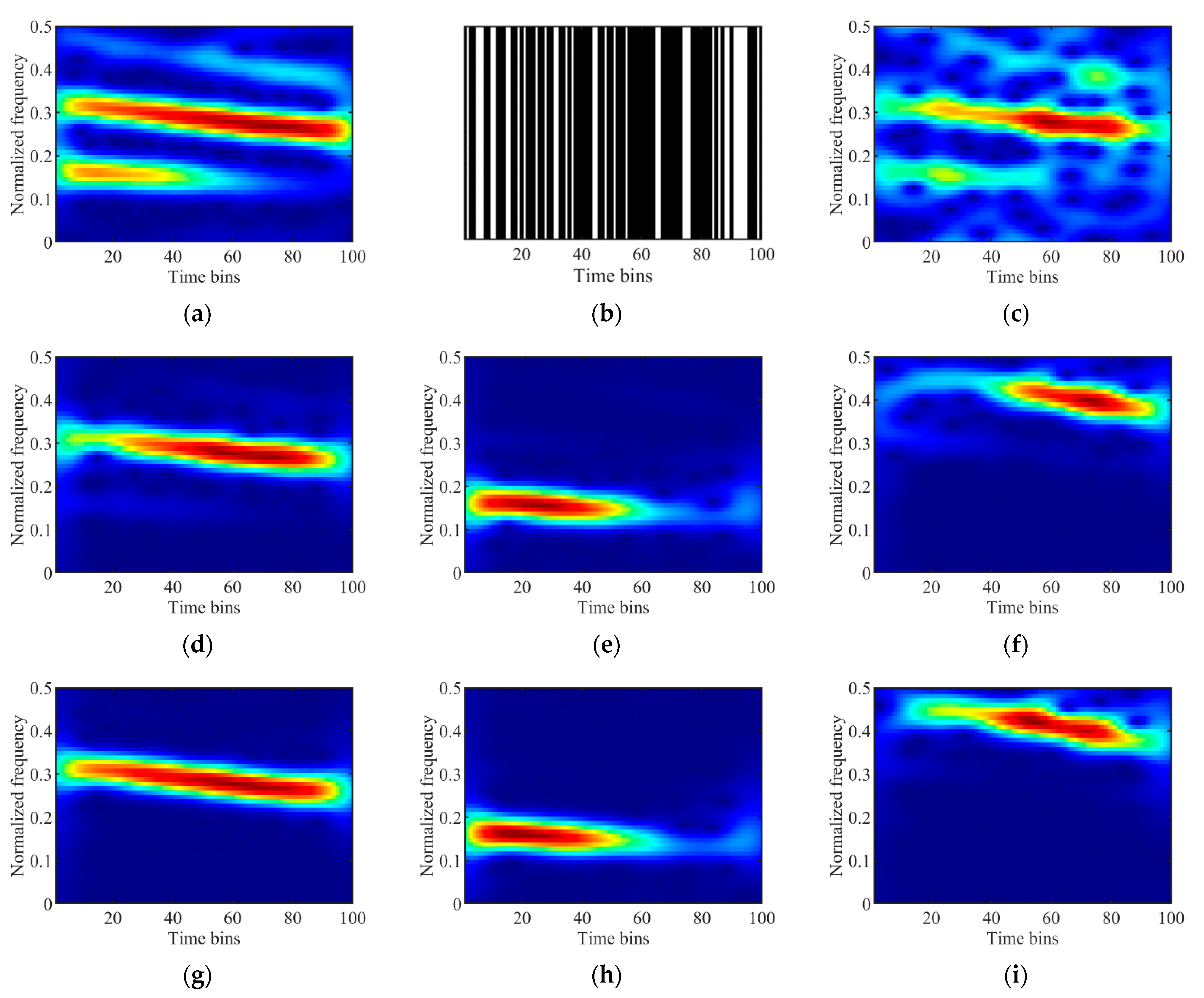
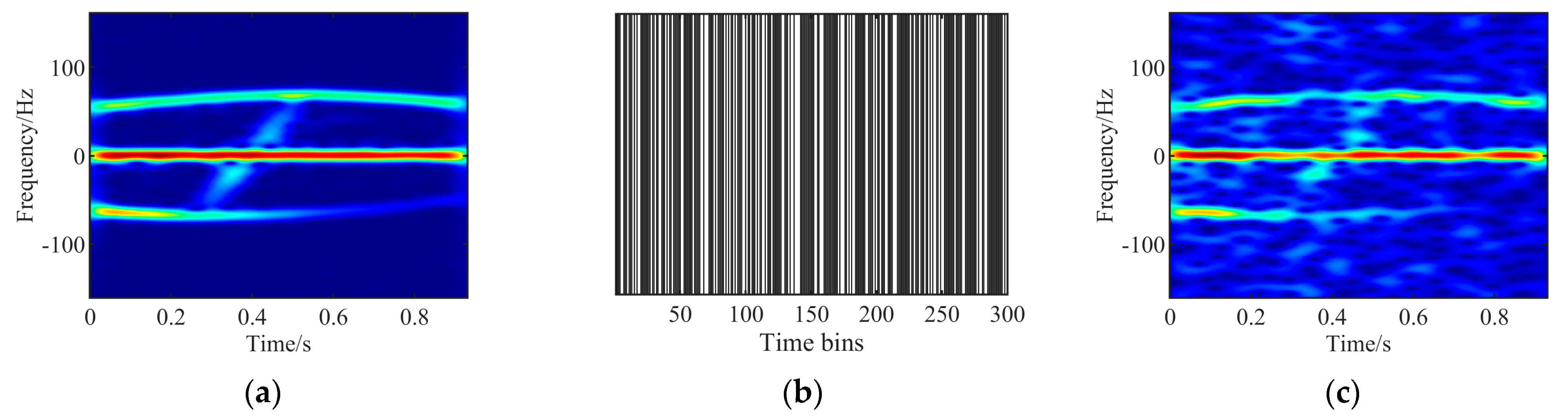
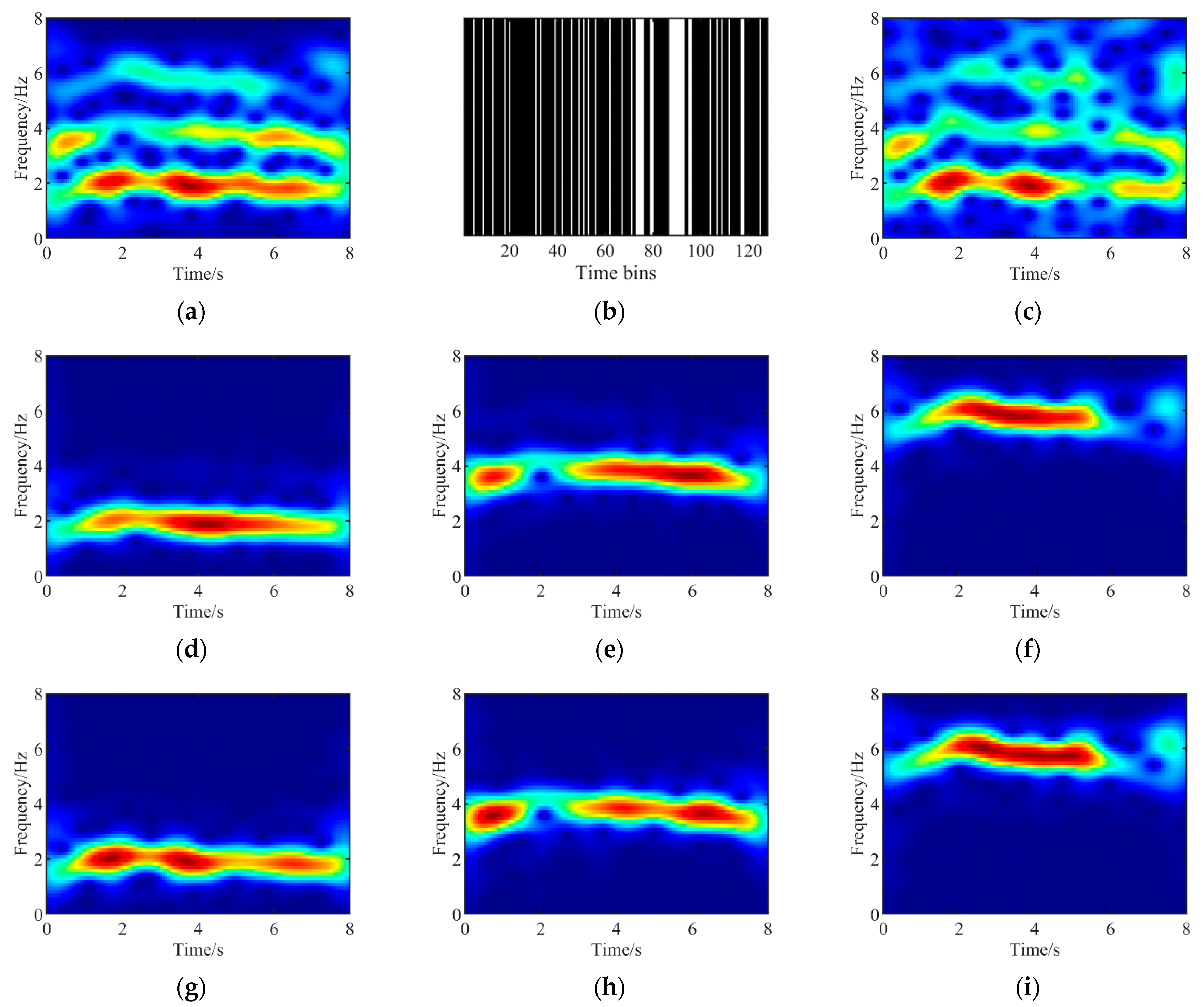
4.3. Real-Life Data
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, V.C.; Li, F.; Ho, S.-S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, Q.; Luo, Y.; Chen, Y. Research progresses in radar feature extraction, imaging, and recognition of target with micro-motions. J. Radars 2018, 7, 531–547. [Google Scholar]
- Peng, B.; Wei, X.; Deng, B.; Chen, H.; Liu, Z.; Li, X. A sinusoidal frequency modulation Fourier transform for Radar-Based vehicle vibration estimation. IEEE Trans. Instrum. Meas. 2014, 63, 2188–2199. [Google Scholar] [CrossRef]
- He, Q.; Zhang, Q.; Luo, Y.; Sun, L. Sinusoidal frequency modulation Fourier-Bessel series for multicomponent SFM signal estimation and separation. Math Probl. Eng. 2017, 1, 5852171. [Google Scholar] [CrossRef]
- Zhang, Q.; Yeo, T.S.; Tan, H.S.; Luo, Y. Imaging of a moving target with rotating parts based on the Hough transform. IEEE Trans. Geosci. Remote Sens. 2008, 46, 291–299. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Y.; Xu, L. Parameter Estimation of Hybrid Linear Frequency Modulation-Sinusoidal Frequency Modulation Signal. IEEE Signal Process. Lett. 2017, 24, 1238–1241. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Liu, N.; Zhou, W.; He, Y. Detection of a Low Observable Sea-Surface Target with Micro-motion via the Radon-Linear Canonical Transform. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1225–1229. [Google Scholar] [CrossRef]
- Guan, J.; Pei, J.; Huang, Y.; Chen, X.; Chen, B. Time-Range Adaptive Focusing Method Based on APC and Iterative Adaptive Radon-Fourier Transform. Remote Sens. 2022, 14, 6182. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Bai, X.; Xing, M.; Zhou, F.; Lu, G.; Bao, Z. Imaging of Micro-motion Targets with Rotating Parts Based on Empirical-Mode Decomposition. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3514–3523. [Google Scholar] [CrossRef]
- Kang, W.; Zhang, Y.; Dong, X. Micro-Doppler effect removal for ISAR imaging based on bivariate variational mode decomposition. IET Radar Sonar Navig. 2018, 12, 74–81. [Google Scholar] [CrossRef]
- Li, Y.; Xia, W.; Dong, S. Time-based multicomponent irregular FM micro-Doppler signals decomposition via STVMD. IET Radar Sonar Navig. 2020, 14, 1502–1511. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Peng, Z.; Zhang, W.; Meng, G. Nonlinear chirp mode decomposition: A variational method. IEEE Trans. Signal Process. 2017, 65, 6024–6037. [Google Scholar] [CrossRef]
- Guo, B.; Peng, S.; Hu, X.; Xu, P. Complex-valued differential operator-based method for multicomponent signal separation. Signal Process. 2017, 132, 66–76. [Google Scholar] [CrossRef]
- Wang, H.; Li, K.M.; Zhang, Y.P.; Luo, Y.; Zhang, Q. Separation of Phase-Corrupted Multicomponent Nonlinear Chirp Signal. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4025205. [Google Scholar] [CrossRef]
- Chen, S.; Yang, Y.; Peng, Z.; Dong, X.; Zhang, W.; Meng, G. Adaptive chirp mode pursuit: Algorithm and applications. Mech. Syst. Signal Process. 2019, 116, 566–584. [Google Scholar] [CrossRef]
- Khan, N.A.; Ali, S. A robust and efficient instantaneous frequency estimator of multicomponent signals with intersecting time-frequency signatures. Signal Process. 2020, 177, 107728. [Google Scholar] [CrossRef]
- Chui, C.K.; Jiang, Q.T.; Li, L.; Lu, J. Time-scale-chirp rate operator for recovery of non-stationary signal components with crossover instantaneous Frequency curves. Appl. Comput. Harmon. A. 2021, 54, 323–344. [Google Scholar] [CrossRef]
- Li, L.; Han, N.N.; Jiang, Q.T.; Chui, C. A chirplet transform-based mode retrieval method for multicomponent signals with crossover instantaneous frequencies. Digital Signal Process. 2022, 120, 103262. [Google Scholar] [CrossRef]
- Hui, Y.; Bai, X.; Zhou, F. JTF analysis of micromotion targets based on single-window variational inference. IEEE Trans. Geosci. Remote Sens. 2021, 59, 6600–6608. [Google Scholar] [CrossRef]
- Zhao, Y.; Feng, J.; Zhang, B.C.; Hong, W.; Wu, Y. Current progressin sparse signal processing applied to radar imaging. SCI China Technol. Sc. 2013, 56, 3049–3054. [Google Scholar] [CrossRef]
- Li, G.; Varshney, P.K. Micro-Doppler parameter estimation via parametric sparse representation and pruned orthogonal matching pursuit. IEEE J. Sel. Topics Appl. Earth Observ. 2014, 7, 4937–4948. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F.; Hui, Y. Obtaining JTF-signature of space-debris from incomplete and phase-corrupted data. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1169–1180. [Google Scholar] [CrossRef]
- Chen, X.; Yu, X.; Huang, Y.; Guan, J. Adaptive clutter suppression and detection algorithm for radar maneuvering target with high-order motions via sparse fractional ambiguity function. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 1515–1526. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F. Radar imaging of micromotion targets from corrupted data. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2789–2802. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, Y.; Li, X. Micro-Doppler Effects Removed Sparse Aperture ISAR Imaging via Low-Rank and Double Sparsity Constrained ADMM and Linearized ADMM. IEEE Trans. Image Process. 2021, 30, 4678–4690. [Google Scholar] [CrossRef]
- Yu, D.; Yang, Y.; Cheng, J. Application of time–frequency entropy method based on Hilbert–Huang transform to gear fault diagnosis. Measurement 2007, 40, 823–830. [Google Scholar] [CrossRef]
- Boashash, B.; Khan, N.A.; Ben-Jabeur, T. Time–frequency features for pattern recognition using high-resolution TFDs: A tutorial review. Digital Signal Process. 2015, 40, 1–30. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ADMM-Based | IRLS-Based | ACMD | OSS | STVMD | |
|---|---|---|---|---|---|
| 4.64 dB | 4.2 dB | 3.62 dB | 3.29 dB | 3.37 dB | |
| 4.58 dB | 4.03 dB | 3.56 dB | 3.2 dB | 3.38 dB | |
| 3.21 dB | 2.98 dB | 2.68 dB | 2.23 dB | 2.31 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, J.; Wang, H.; Li, K.-M.; Luo, Y.; Zhang, Q.; Chen, Z. Separation of Multicomponent Micro-Doppler Signal with Missing Samples. Remote Sens. 2024, 16, 1369. https://doi.org/10.3390/rs16081369
Ren J, Wang H, Li K-M, Luo Y, Zhang Q, Chen Z. Separation of Multicomponent Micro-Doppler Signal with Missing Samples. Remote Sensing. 2024; 16(8):1369. https://doi.org/10.3390/rs16081369
Chicago/Turabian StyleRen, Jianfei, Huan Wang, Kai-Ming Li, Ying Luo, Qun Zhang, and Zhuo Chen. 2024. "Separation of Multicomponent Micro-Doppler Signal with Missing Samples" Remote Sensing 16, no. 8: 1369. https://doi.org/10.3390/rs16081369
APA StyleRen, J., Wang, H., Li, K.-M., Luo, Y., Zhang, Q., & Chen, Z. (2024). Separation of Multicomponent Micro-Doppler Signal with Missing Samples. Remote Sensing, 16(8), 1369. https://doi.org/10.3390/rs16081369