
Automatic Building Roof Plane Extraction in Urban Environments for 3D City Modelling Using Remote Sensing Data


 ,
,  ,
, 

Abstract
1. Introduction
2. Materials and Methods
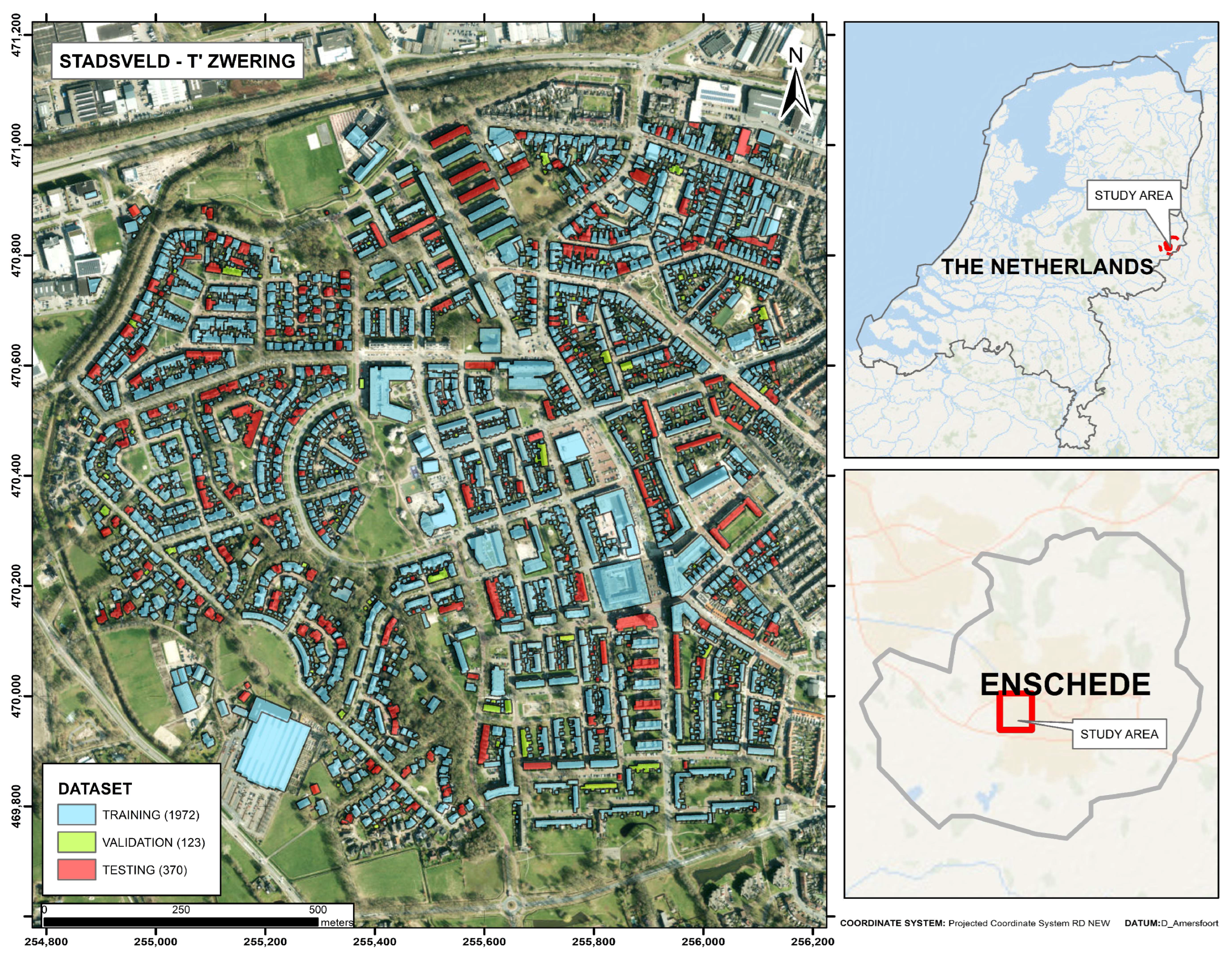
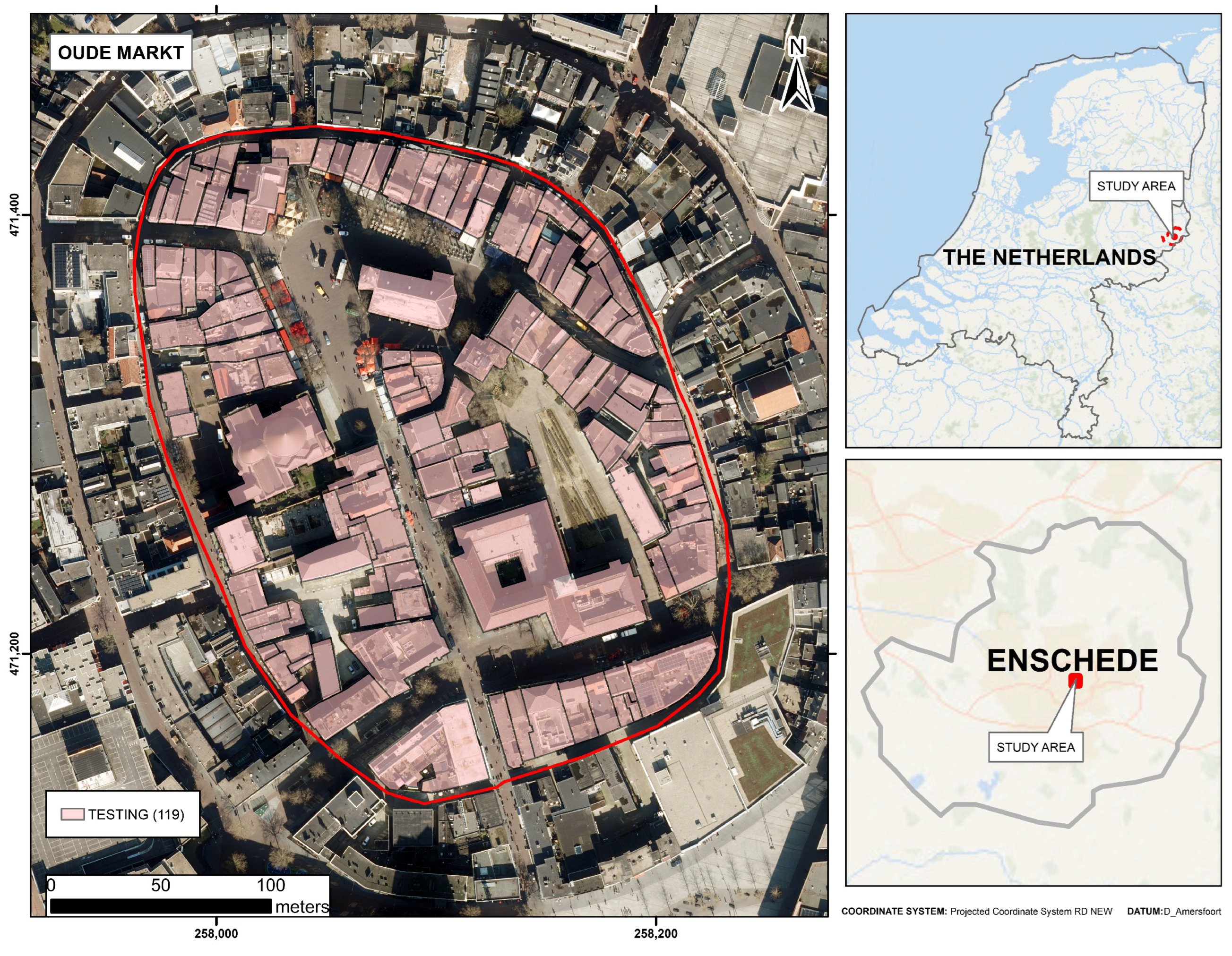
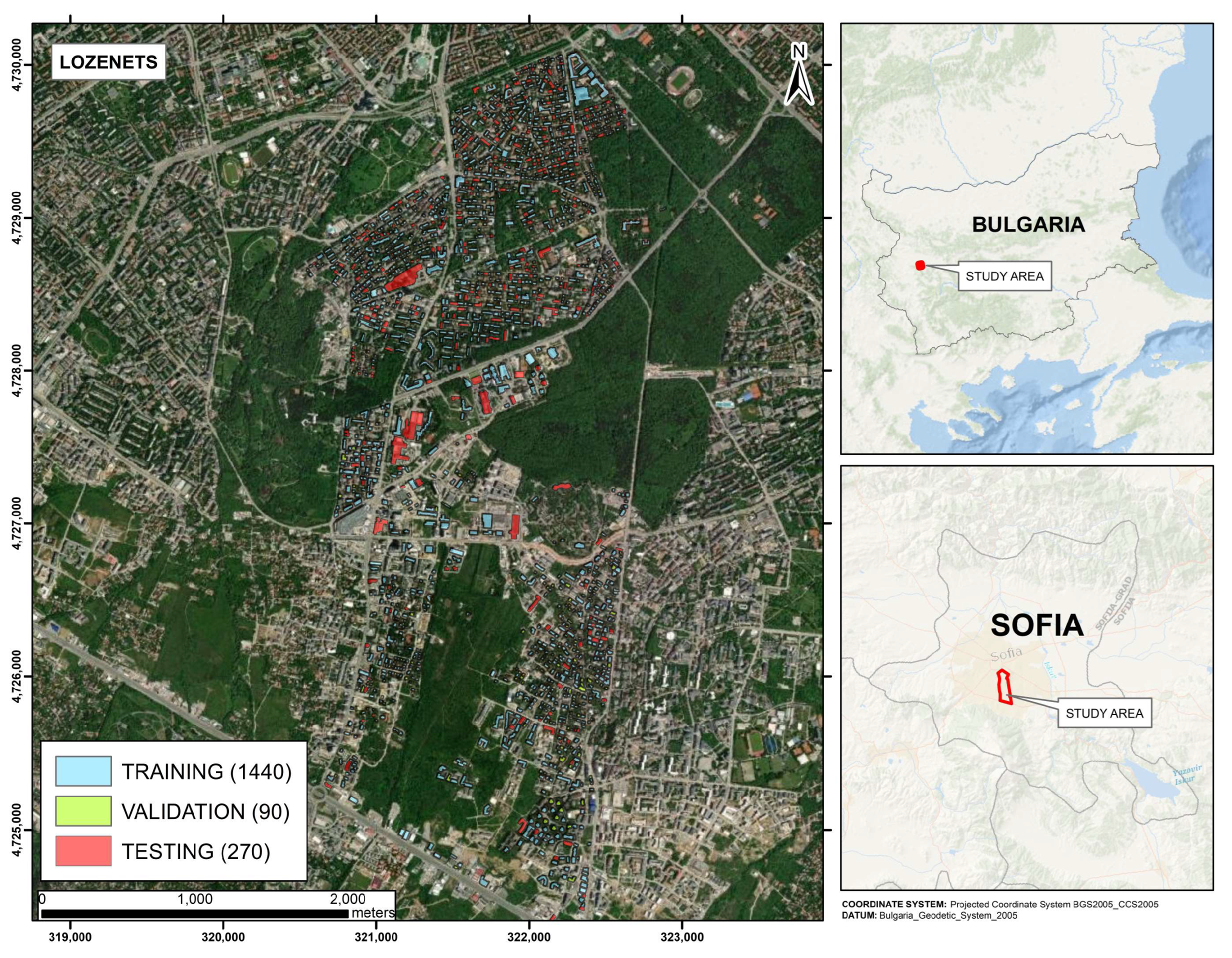
2.1. Study Area
2.2. Data
2.3. Roof Plane Extraction
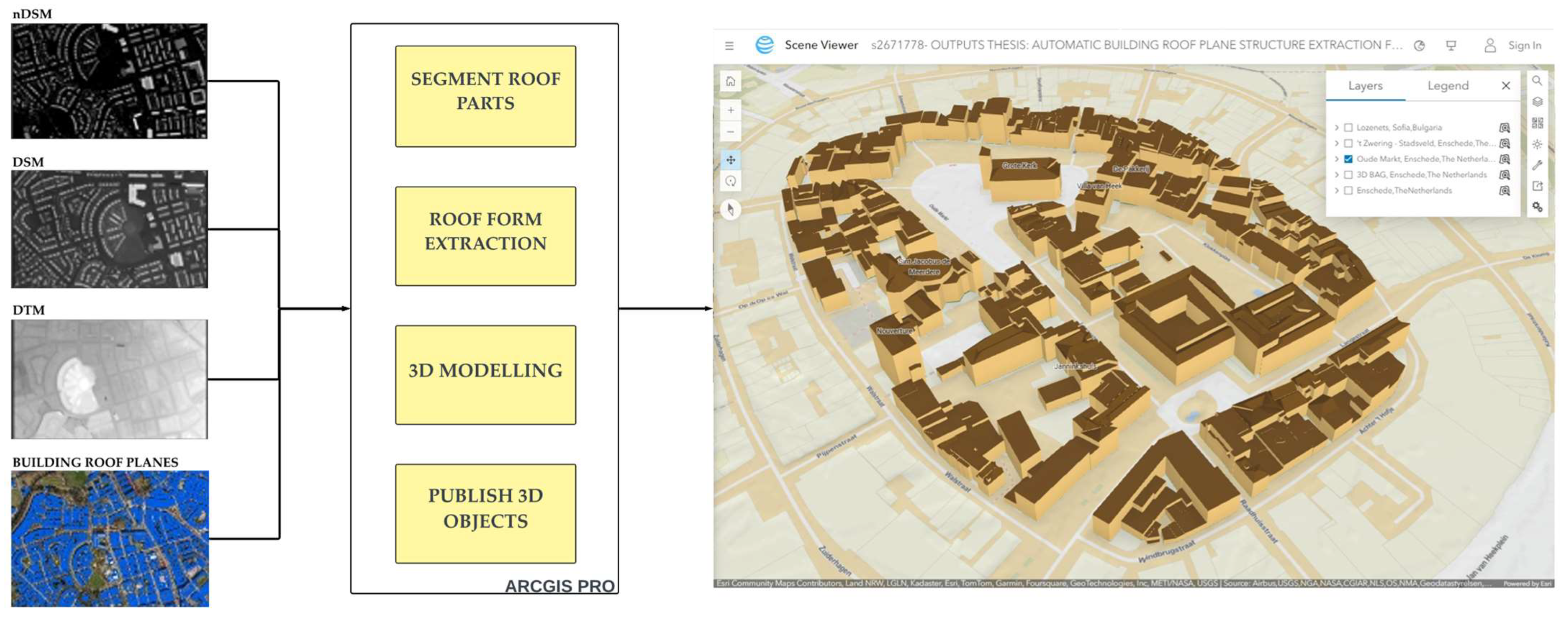
2.4. 3D Modelling
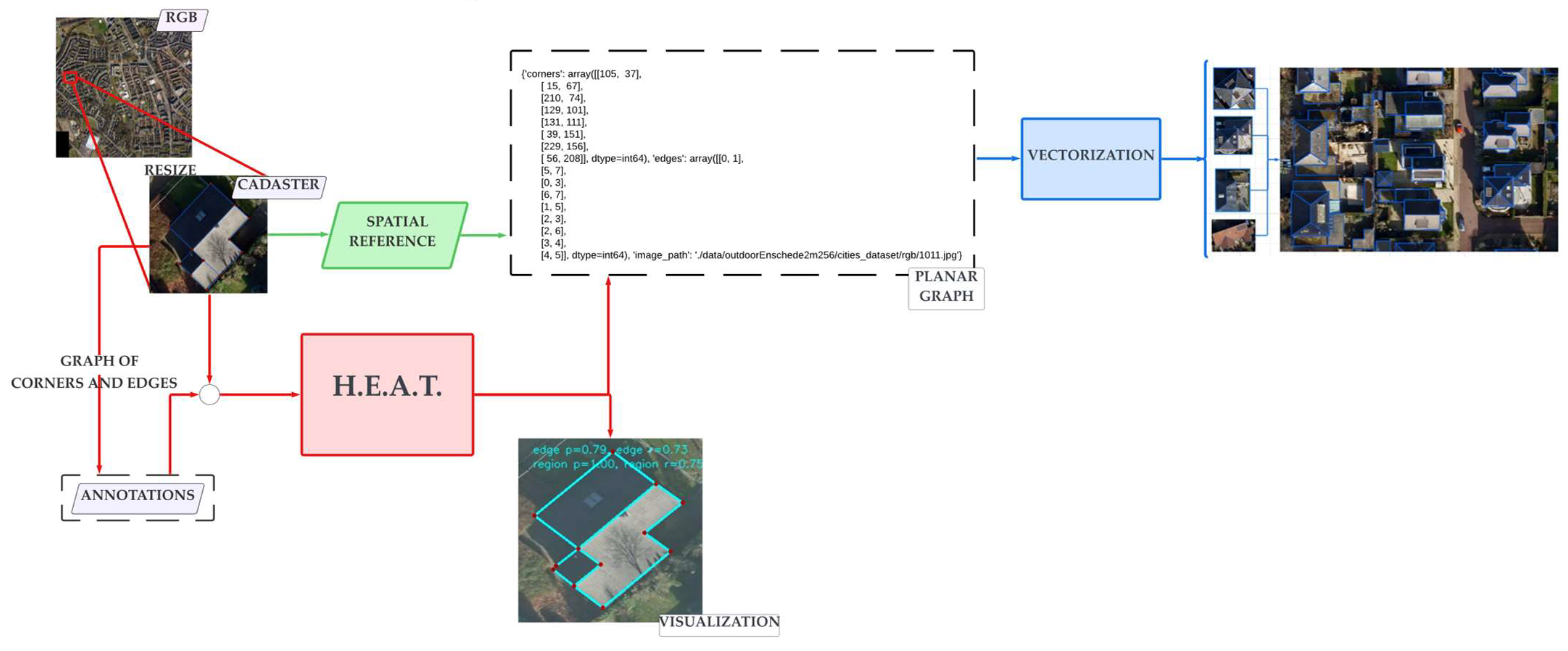
3. Proposed Framework
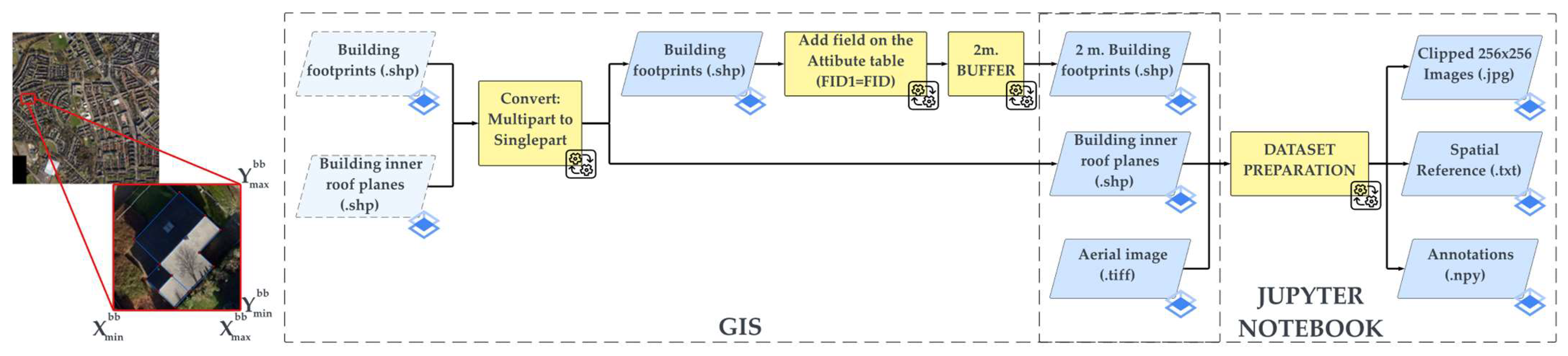
3.1. Data Preparation Implementation
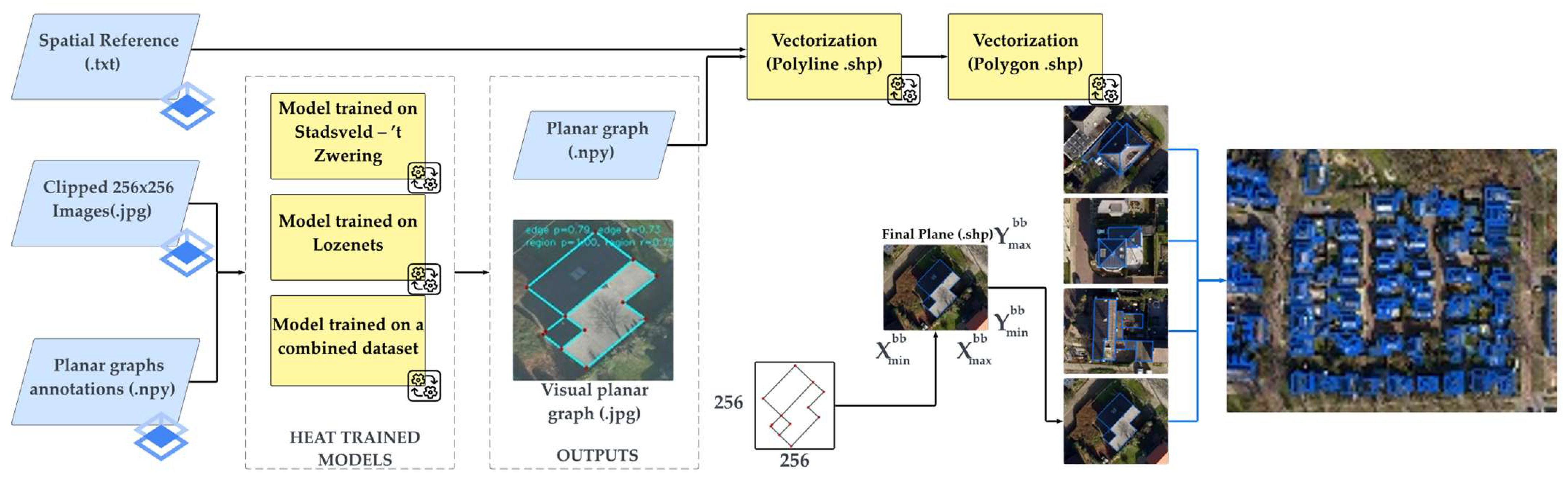
3.2. Training HEAT Model
3.3. Building Roof Plane Extraction
- -
- corners’: This key corresponds to a 2D array of integers, where each row represents the x and y coordinates of an identified corner in the building image sample;
- -
- edges’: This key corresponds to a 2D array of integers. Each row represents a pair of corners (indicated by their indices in the ‘corners’ array) forming an edge;
- -
- image_path’: This key corresponds to a string specifying an image file’s path. This image aligns with the deduced corners and edges on the input-image building sample.
3.4. 3D Modelling
3.5. Evaluation Metrics
- -
- Corners. A corner is successfully predicted and considered a true positive if a ground-truth corner is located within an Euclidean distance of an 8-pixel radius. In cases where multiple corners are detected around a single ground-truth corner, only the closest corner will be deemed a true positive;
- -
- Edges. An edge is successfully predicted and considered a true positive if both end corners are detected and the pair of corners exists on the ground truth;
- -
- Regions. A region is successfully predicted and considered a true positive if the intersection over union (IoU) of a region defined by the different connected components of predicted corners and edges and a ground-truth region is greater than or equal to 0.7;
4. Results
4.1. Quantitative Results
4.1.1. Building Roof Plane Extraction
4.1.2. 3D City Modelling
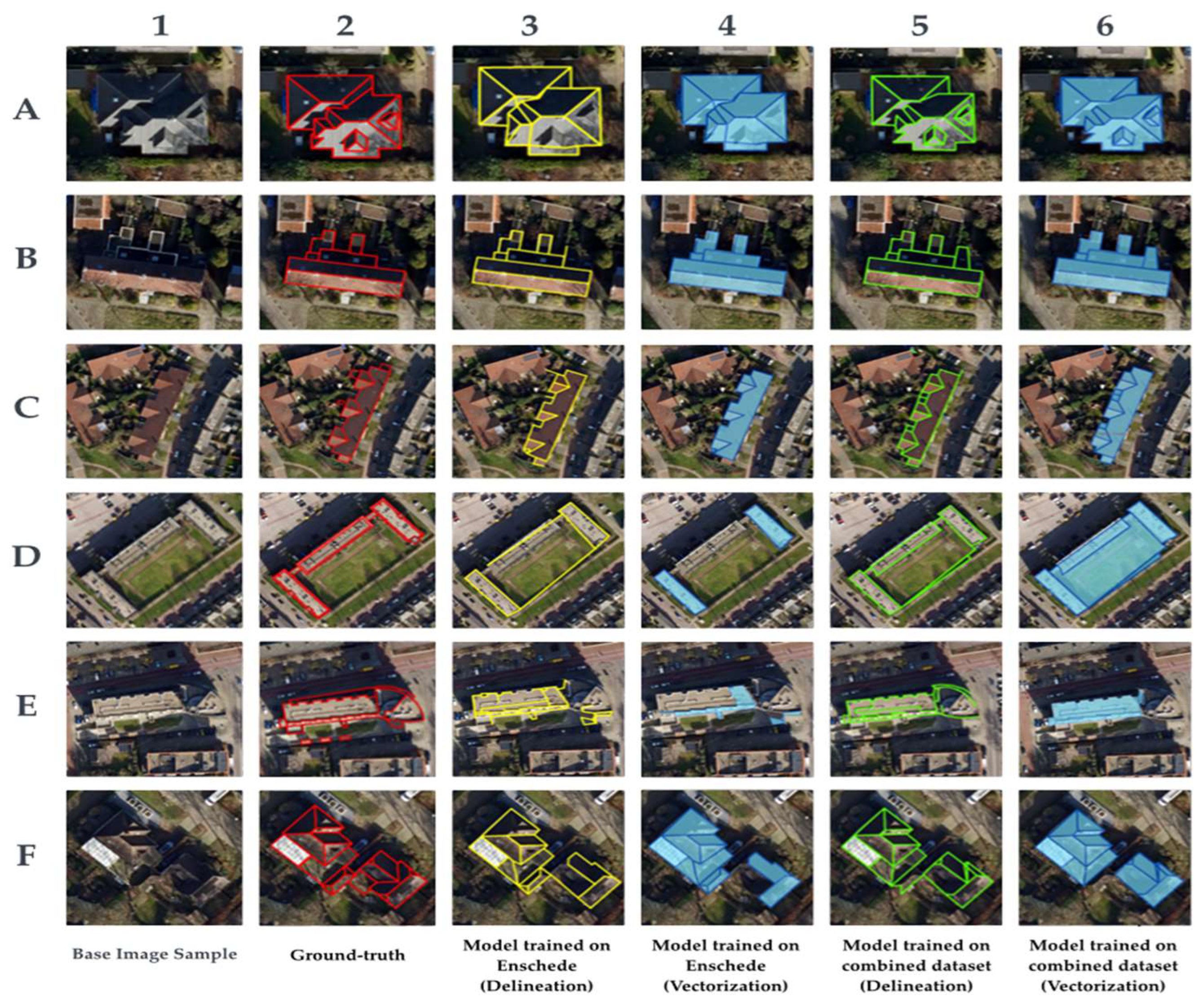
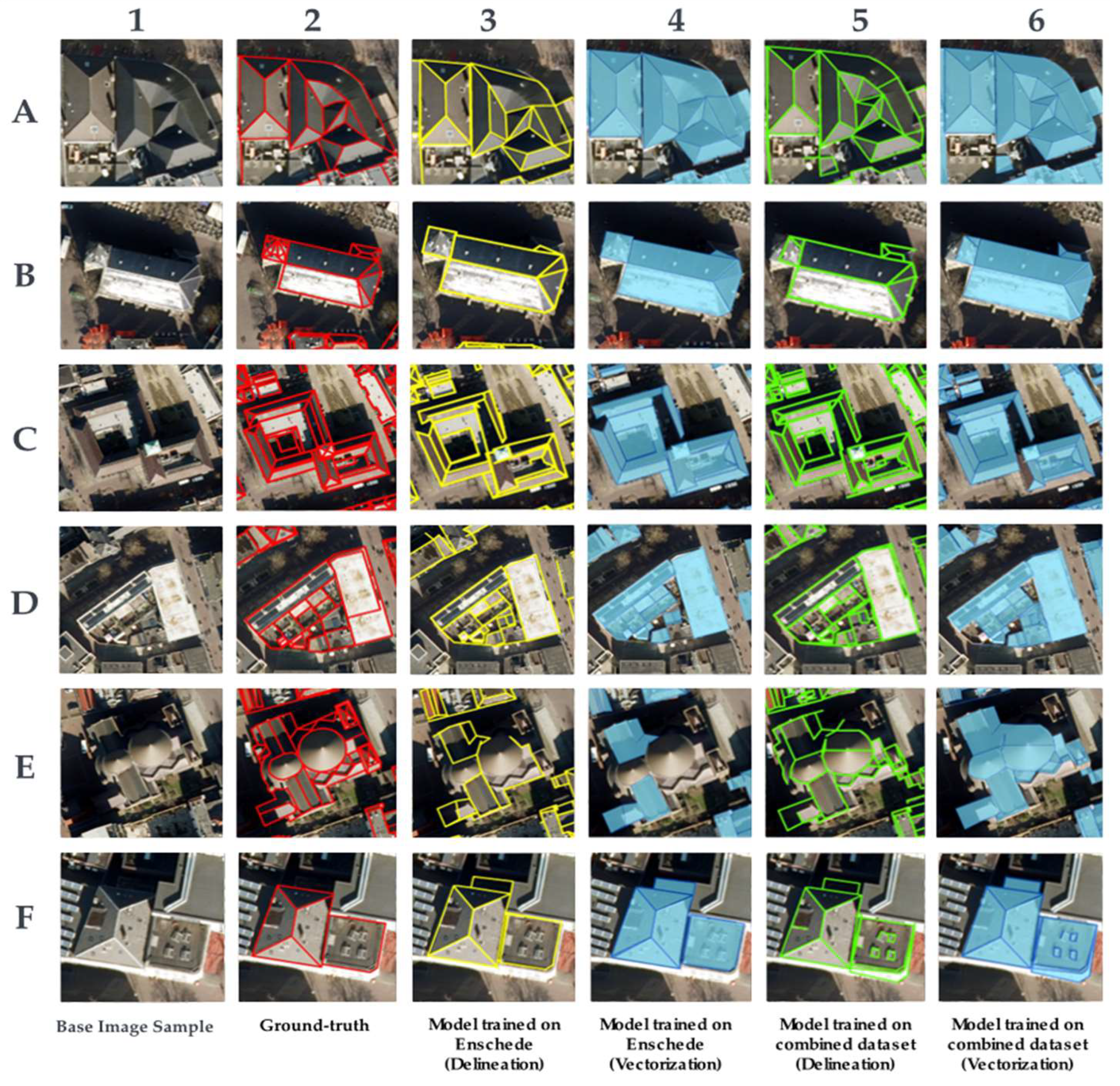
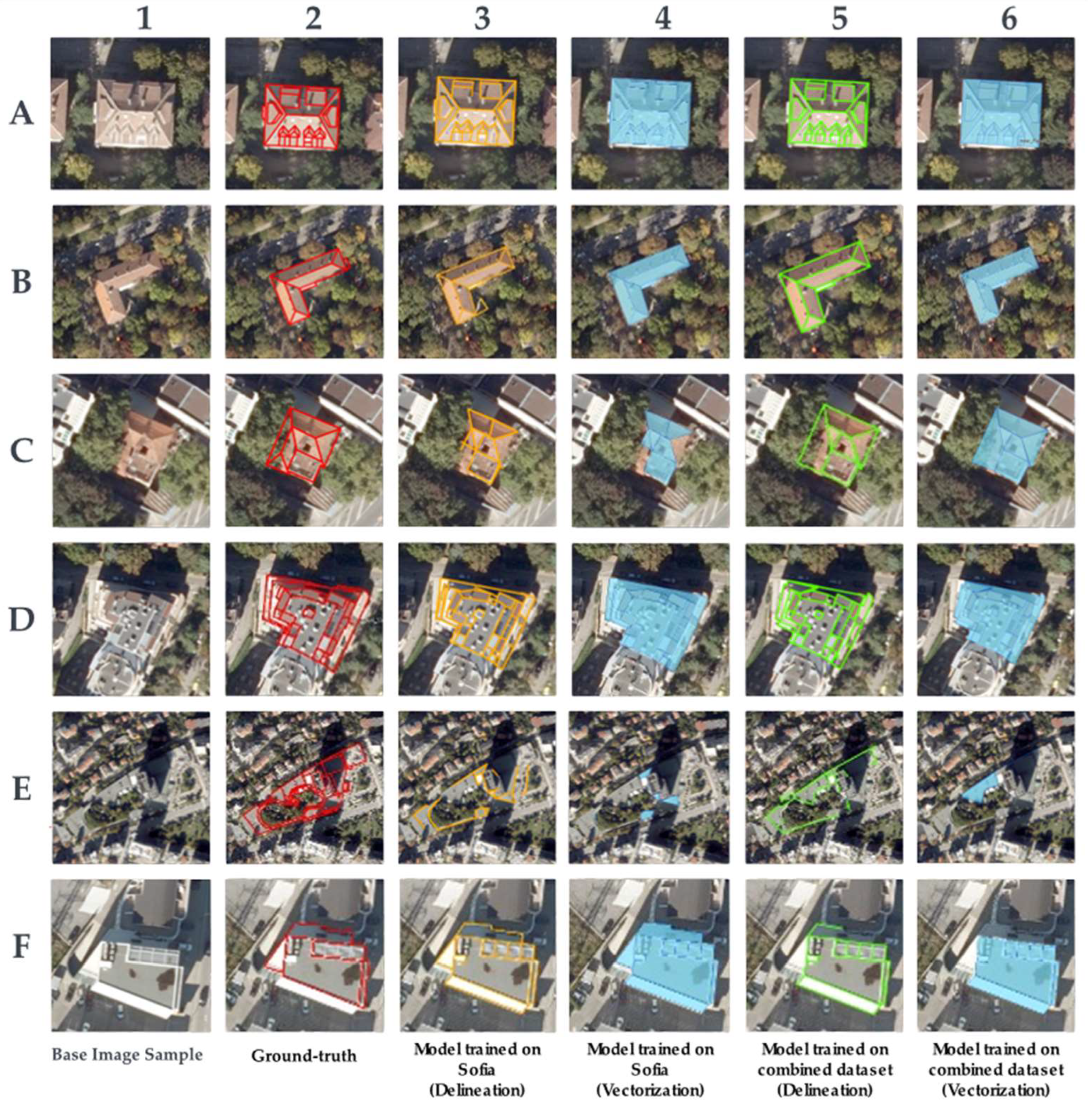
4.2. Qualitative Results
4.2.1. Building Roof Plane Extraction
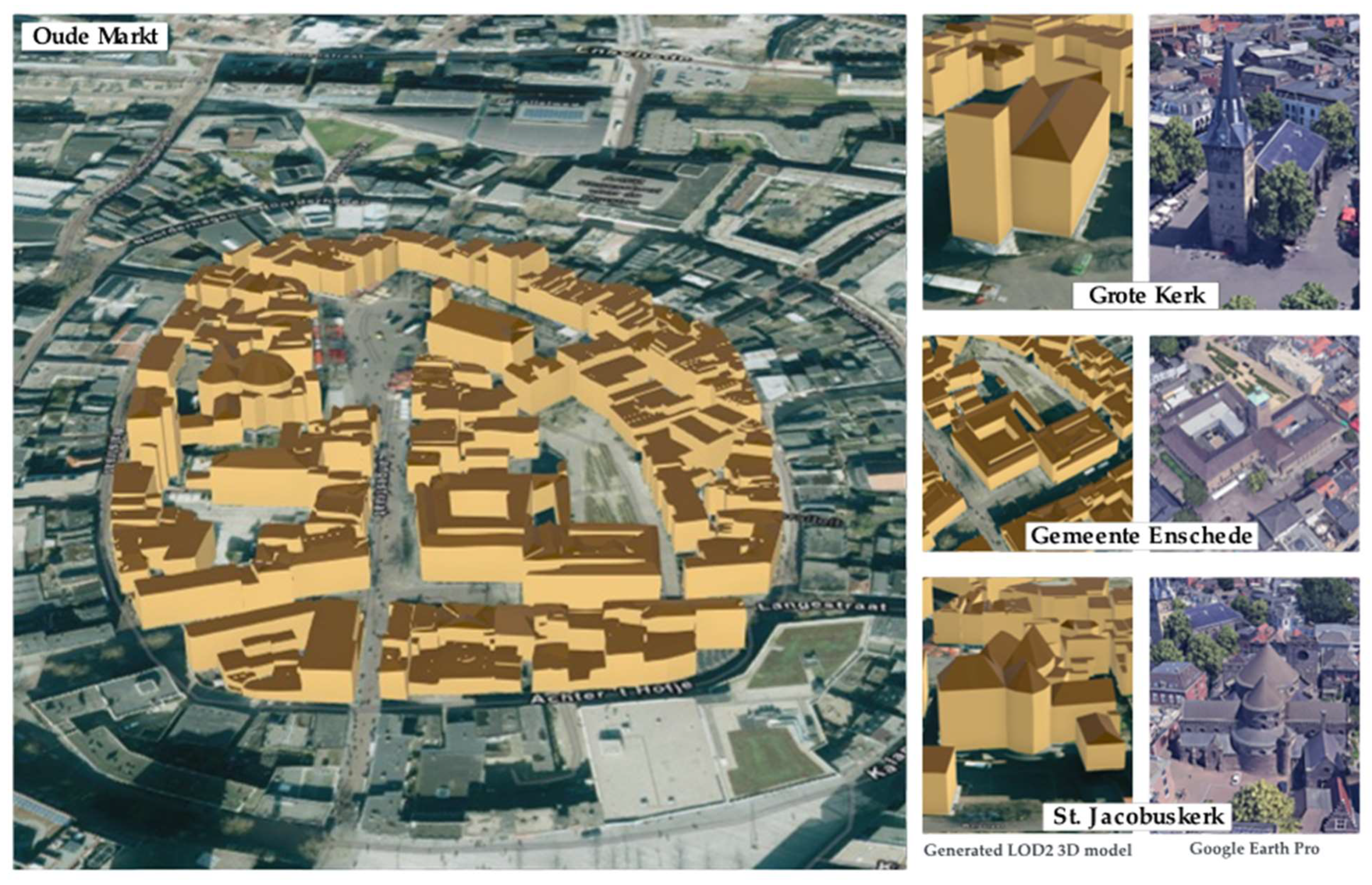
4.2.2. 3D Modelling
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shojaei, D.; Olfat, H.; Rajabifard, A.; Briffa, M. Design and Development of a 3D Digital Cadastre Visualization Prototype. ISPRS Int. J. Geo Inf. 2018, 7, 384. [Google Scholar] [CrossRef]
- Rau, J.Y.; Cheng, C.K. A Cost-Effective Strategy for Multi-Scale Photo-Realistic Building Modeling and Web-Based 3-D GIS Applications in Real Estate. Comput. Environ. Urban Syst. 2013, 38, 35–44. [Google Scholar] [CrossRef]
- Van Oosterom, P. Research and Development in 3D Cadastres. Comput. Environ. Urban Syst. 2013, 40, 1–6. [Google Scholar] [CrossRef]
- Hajji, R.; Yaagoubi, R.; Meliana, I.; Laafou, I.; Gholabzouri, A. El Development of an Integrated BIM-3D GIS Approach for 3D Cadastre in Morocco. ISPRS Int. J. Geo Inf. 2021, 10, 351. [Google Scholar] [CrossRef]
- Dimitrov, H.; Petrova-Antonova, D. 3D City Model as a First Step towards Digital Twin of Sofia City. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2021, 43, 23–30. [Google Scholar] [CrossRef]
- Peters, R.; Dukai, B.; Vitalis, S.; van Liempt, J.; Stoter, J. Automated 3D Reconstruction of LoD2 and LoD1 Models for All 10 Million Buildings of the Netherlands. Photogramm. Eng. Remote Sens. 2022, 88, 165–170. [Google Scholar] [CrossRef]
- Kolbe, T.H.; Gröger, G.; Plümer, L. CityGML: Interoperable Access to 3D City Models. Proc. Int. Symp. Geo Inf. Disaster Manag. 2005, 1, 883–899. [Google Scholar] [CrossRef]
- Consortium, O.G. OGC City Geography Markup Language (CityGML) 3.0 Conceptual Model Users Guide. Available online: https://docs.ogc.org/guides/20-066.html#overview-section-levelsofdetail (accessed on 1 April 2024).
- Macay Moreia, J.M.; Nex, F.; Agugiaro, G.; Remondino, F.; Lim, N.J. From Dsm to 3D Building Models: A Quantitative Evaluation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W1, 213–219. [Google Scholar] [CrossRef]
- Biljecki, F.; Ledoux, H.; Stoter, J. An Improved LOD Specification for 3D Building Models. Comput. Environ. Urban Syst. 2016, 59, 25–37. [Google Scholar] [CrossRef]
- Santhanavanich, J. Open-Source CityGML 3D Semantical Building Models: A Complete List of Open-Source 3D City Models. Available online: https://towardsdatascience.com/open-source-3d-semantical-building-models-in-2020-f47c91f6cd97 (accessed on 18 December 2023).
- Ghaffarian, S.; Ghaffarian, S.; El Merabet, Y.; Samir, Z.; Ruichek, Y. Automatic Building Roof Segmentation Based On PFICA Algorithm And Morphological Filtering From Lidar Point Clouds. In Proceedings of the 37th Asian Conference on Remote Sensing, ACRS 2016: Spatial Data Infrastructure for Sustainable Development, Colombo, Sri Lanka, 17–21 October 2016. [Google Scholar]
- Lee, J.; Zlatanova, S.; Gartner, G.; Meng, L.; Peterson, M.P. 3D Geo-Information Sciences. In Lecture Notes in Geoinformation and Cartography; Lee, J., Zlatanova, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 79–96. ISBN 9783540873945. [Google Scholar]
- Soilán, M.; Truong-Hong, L.; Riveiro, B.; Laefer, D. Automatic Extraction of Road Features in Urban Environments Using Dense ALS Data. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 226–236. [Google Scholar] [CrossRef]
- Sun, X. Deep Learning-Based Building Extraction Using Aerial Images and Digital Surface Models; University of Twente: Enschede, The Netherlands, 2021; Available online: https://essay.utwente.nl/88648/ (accessed on 23 December 2023).
- Huang, J.; Stoter, J.; Peters, R.; Nan, L. City3D: Large-Scale Building Reconstruction from Airborne LiDAR Point Clouds. Remote Sens. 2022, 14, 2254. [Google Scholar] [CrossRef]
- Zhao, W.; Persello, C.; Stein, A. Extracting Planar Roof Structures from Very High Resolution Images Using Graph Neural Networks. ISPRS J. Photogramm. Remote Sens. 2022, 187, 34–45. [Google Scholar] [CrossRef]
- Ok, A.O. Automated Detection of Buildings from Single VHR Multispectral Images Using Shadow Information and Graph Cuts. ISPRS J. Photogramm. Remote Sens. 2013, 86, 21–40. [Google Scholar] [CrossRef]
- Qin, Y.; Wu, Y.; Li, B.; Gao, S.; Liu, M.; Zhan, Y. Semantic Segmentation of Building Roof in Dense Urban Environment with Deep Convolutional Neural Network: A Case Study Using GF2 VHR Imagery in China. Sensors 2019, 19, 1164. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Ma, H.; Ma, H.; Cai, Z.; Zhang, L. Building Extraction from Airborne LiDAR Data Based on Min-Cut and Improved Post-Processing. Remote Sens. 2020, 12, 2849. [Google Scholar] [CrossRef]
- Rezaei, Z.; Vahidnia, M.H.; Aghamohammadi, H.; Azizi, Z.; Behzadi, S. Digital Twins and 3D Information Modeling in a Smart City for Traffic Controlling: A Review. J. Geogr. Cartogr. 2023, 6, 1865. [Google Scholar] [CrossRef]
- Zhao, W.; Persello, C.; Stein, A. Building Outline Delineation: From Aerial Images to Polygons with an Improved End-to-End Learning Framework. ISPRS J. Photogramm. Remote Sens. 2021, 175, 119–131. [Google Scholar] [CrossRef]
- Chen, J.; Qian, Y.; Furukawa, Y. HEAT: Holistic Edge Attention Transformer for Structured Reconstruction. Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit. 2022, 2022, 3856–3865. [Google Scholar] [CrossRef]
- Golnia, M. Building Outline Delineation and Roofline Extraction: A Deep Learning Approach; University of Twente: Enschede, The Netherlands, 2021; Available online: https://essay.utwente.nl/88990/ (accessed on 23 December 2023).
- Girard, N.; Tarabalka, Y. End-to-end learning of polygons for remote sensing image classification. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, NJ, USA, 22–27 July 2018; IEEE: Piscataway, NJ, USA; pp. 2083–2086. [Google Scholar]
- Marcos, D.; Tuia, D.; Kellenberger, B.; Zhang, L.; Bai, M.; Liao, R.; Urtasun, R. Learning Deep Structured Active Contours End-to-End. Presented at the 31st Meeting of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2018, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8877–8885. [Google Scholar]
- PDOK (the Public Services On the Map). Available online: https://www.pdok.nl/ (accessed on 5 December 2022).
- AHN Viewer. Available online: https://ahn.arcgisonline.nl/ahnviewer/ (accessed on 29 April 2023).
- Use 3D Basemaps. Available online: https://doc.arcgis.com/en/arcgis-solutions/10.9.1/reference/use-3d-basemaps.htm (accessed on 22 November 2023).
- Automatic Building Roof Plane Structure Extraction from Remote Sensing Data. Available online: https://www.arcgis.com/home/webscene/viewer.html?webscene=b09bd9fcb9ec4d39a85f9d672776b06e&viewpoint=cam:6.89874543,52.21450794,543.283;349.682,52.253 (accessed on 27 November 2023).
- Hossain, M.D.; Chen, D. A Hybrid Image Segmentation Method for Building Extraction from High-Resolution RGB Images. ISPRS J. Photogramm. Remote Sens. 2022, 192, 299–314. [Google Scholar] [CrossRef]
- Campoverde, C. Carecamp93/Automatic_Roof_Plane_Extraction. Available online: https://github.com/carecamp93/Automatic_Roof_Plane_Extraction (accessed on 1 April 2024).
- Campoverde, C. 1-Roof Extraction. Available online: https://drive.google.com/drive/folders/1ZDmQDv58faQrKPdYRurABFxSAF1o398h?usp=sharing (accessed on 1 April 2024).
- Campoverde, C. 2-3D Modelling. Available online: https://drive.google.com/drive/folders/1C0qwlgx6gXsfIcFQd_x9gPT2yih6e-jf?usp=sharing (accessed on 1 April 2024).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Data | Source |
|---|---|---|
| Stadsveld–‘t Zwering, Enschede, The Netherlands | RGB Orthophoto (8 cm) | PDOK [27], from aerial imagery, 2020 |
| The buildings inner roof planes, in polygon vector format | Digitalized by the author, 2023 | |
| The buildings footprints, in polygon vector format | PDOK [27], edited by the author, 2023 | |
| Oude Markt Enschede, The Netherlands | RGB Orthophoto (8 cm) | PDOK [27], from aerial imagery, 2020 |
| The buildings inner roof planes, in polygon vector format | Digitalized by the author, 2023 | |
| The buildings footprints, in polygon vector format | PDOK [27], edited by the author, 2023 | |
| LIDAR, point cloud | AHN4 [28] (Point Cloud), 2020 | |
| Lozenets, Sofia, Bulgaria | RGB Orthophoto (10 cm) | GATE, from aerial imagery, 2020 |
| The buildings inner roof planes, in polygon vector format | Digitalized by RMSI, 2023 | |
| The buildings footprints, in polygon vector format | Digitalized by RMSI, 2023 |
| Model | Dataset Size | Max. Number of Corners per Image | ||||
|---|---|---|---|---|---|---|
| Training | Validation | Total | Image Size | Batch Size | ||
| Model trained on the Stadsveld–‘t Zwering, Enschede, The Netherlands, dataset | 1972 | 123 | 2095 | 256 | 16 | 150 |
| Model trained on the Lozenets, Sofia, Bulgaria, dataset | 1440 | 90 | 1530 | |||
| Model trained on the combined dataset from Stadsveld–‘t Zwering and Lozenets dataset | 3412 | 213 | 3625 | |||
| Area | Models | Corners | Edges | Regions | Vectorization | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Precision | Recall | F1 Score | Precision | Recall | F1 Score | Precision | Recall | F1 Score | IoU | ||
| Stadsveld–’t Zwering, Enschede, The Netherlands | Model trained on Enschede dataset | 0.85 | 0.68 | 0.76 | 0.61 | 0.50 | 0.55 | 0.72 | 0.64 | 0.68 | 0.82 |
| Model trained on Sofia dataset | 0.52 | 0.72 | 0.60 | 0.34 | 0.48 | 0.40 | 0.41 | 0.56 | 0.47 | - | |
| Model trained on combined dataset | 0.85 | 0.68 | 0.76 | 0.61 | 0.51 | 0.56 | 0.73 | 0.64 | 0.68 | 0.80 | |
| Oude Markt, Enschede, The Netherlands | Model trained on Enschede dataset | 0.69 | 0.46 | 0.55 | 0.38 | 0.24 | 0.29 | 0.49 | 0.30 | 0.37 | 0.66 |
| Model trained on Sofia dataset | 0.43 | 0.64 | 0.51 | 0.22 | 0.34 | 0.27 | 0.27 | 0.40 | 0.32 | - | |
| Model trained on combined dataset | 0.60 | 0.55 | 0.57 | 0.31 | 0.29 | 0.30 | 0.44 | 0.43 | 0.43 | 0.82 | |
| Lozenets, Sofia, Bulgaria | Model trained on Enschede dataset | 0.84 | 0.27 | 0.41 | 0.39 | 0.12 | 0.19 | 0.45 | 0.13 | 0.21 | - |
| Model trained on Sofia dataset | 0.80 | 0.53 | 0.63 | 0.44 | 0.31 | 0.37 | 0.47 | 0.37 | 0.41 | 0.71 | |
| Model trained on combined dataset (Enschede + Sofia) | 0.81 | 0.50 | 0.62 | 0.44 | 0.30 | 0.36 | 0.47 | 0.35 | 0.41 | 0.70 | |
| Area | RMSE | Total | |||||
|---|---|---|---|---|---|---|---|
| (0–5) m. | (5–10) m. | (10–15) m. | (15–20) m. | (25–30) m. | |||
| Oude Markt, Enschede, The Netherlands | No. of buildings’ planes | 473 | 164 | 25 | 8 | 2 | 672 |
| % | 70.39 | 24.40 | 3.72 | 1.19 | 0.30 | 100.00 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Campoverde, C.; Koeva, M.; Persello, C.; Maslov, K.; Jiao, W.; Petrova-Antonova, D. Automatic Building Roof Plane Extraction in Urban Environments for 3D City Modelling Using Remote Sensing Data. Remote Sens. 2024, 16, 1386. https://doi.org/10.3390/rs16081386
Campoverde C, Koeva M, Persello C, Maslov K, Jiao W, Petrova-Antonova D. Automatic Building Roof Plane Extraction in Urban Environments for 3D City Modelling Using Remote Sensing Data. Remote Sensing. 2024; 16(8):1386. https://doi.org/10.3390/rs16081386
Chicago/Turabian StyleCampoverde, Carlos, Mila Koeva, Claudio Persello, Konstantin Maslov, Weiqin Jiao, and Dessislava Petrova-Antonova. 2024. "Automatic Building Roof Plane Extraction in Urban Environments for 3D City Modelling Using Remote Sensing Data" Remote Sensing 16, no. 8: 1386. https://doi.org/10.3390/rs16081386
APA StyleCampoverde, C., Koeva, M., Persello, C., Maslov, K., Jiao, W., & Petrova-Antonova, D. (2024). Automatic Building Roof Plane Extraction in Urban Environments for 3D City Modelling Using Remote Sensing Data. Remote Sensing, 16(8), 1386. https://doi.org/10.3390/rs16081386