
Through-Wall Imaging Using Low-Cost Frequency-Modulated Continuous Wave Radar Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
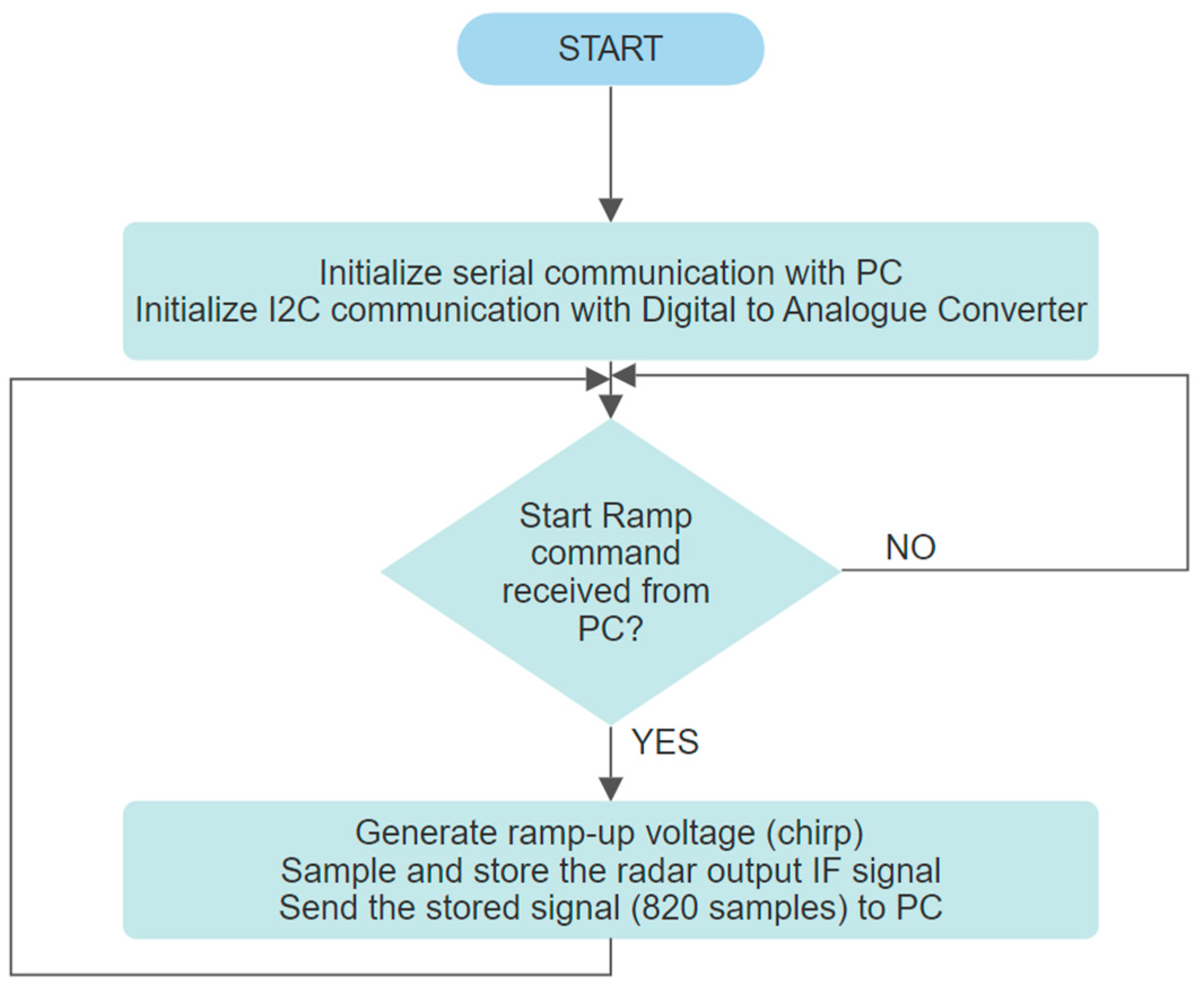
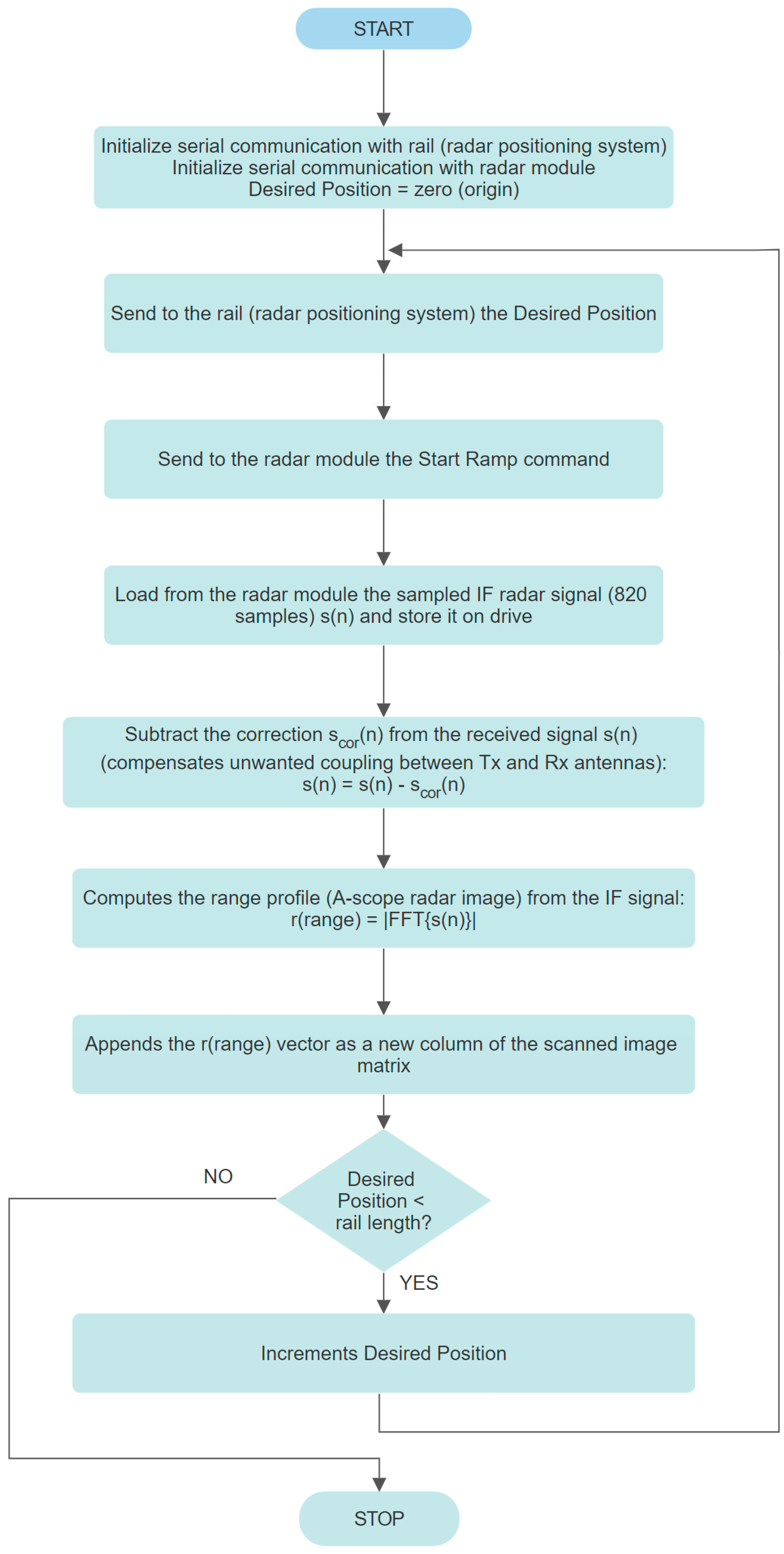
2.1. GB-SAR Implementation
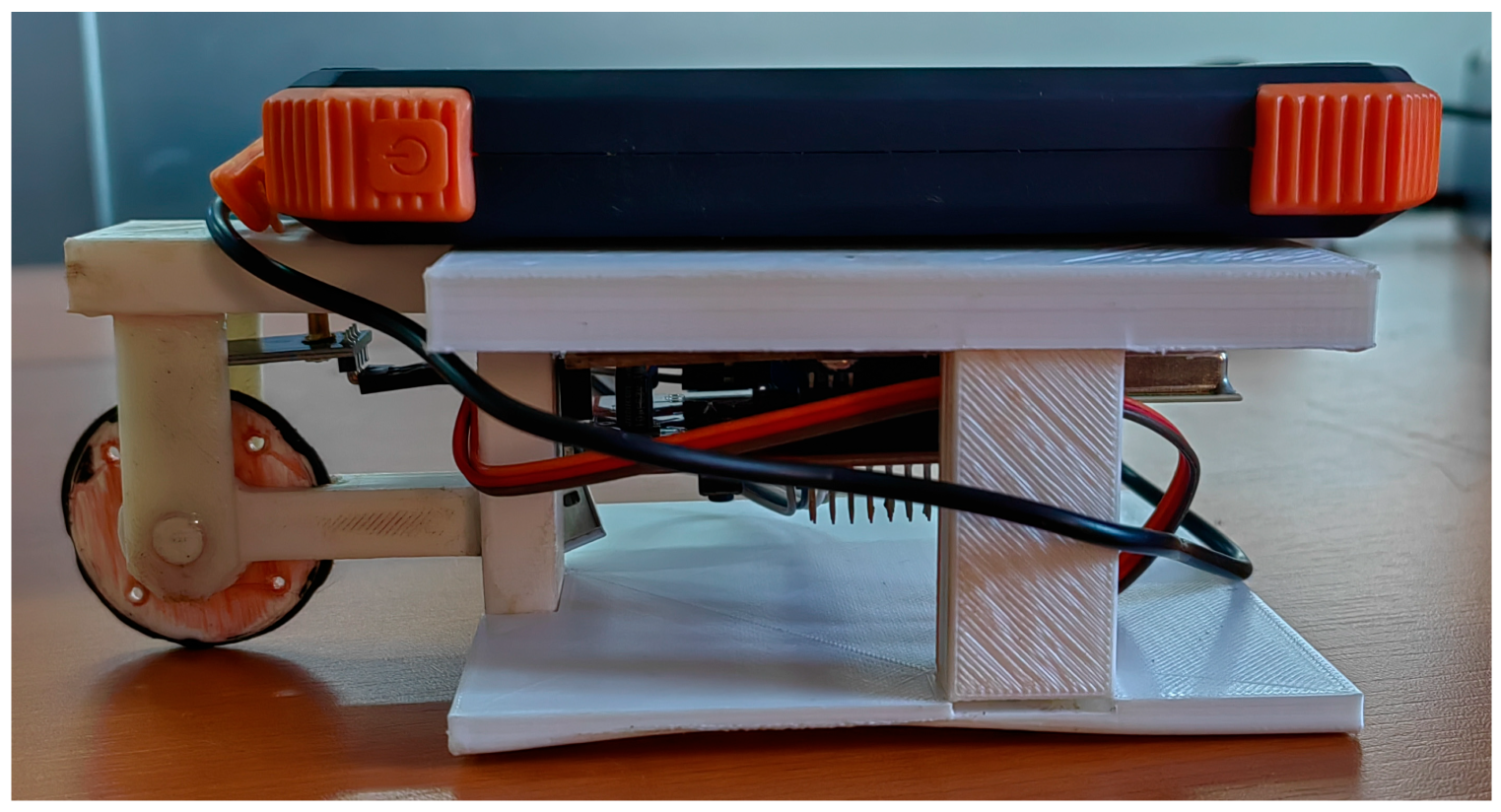
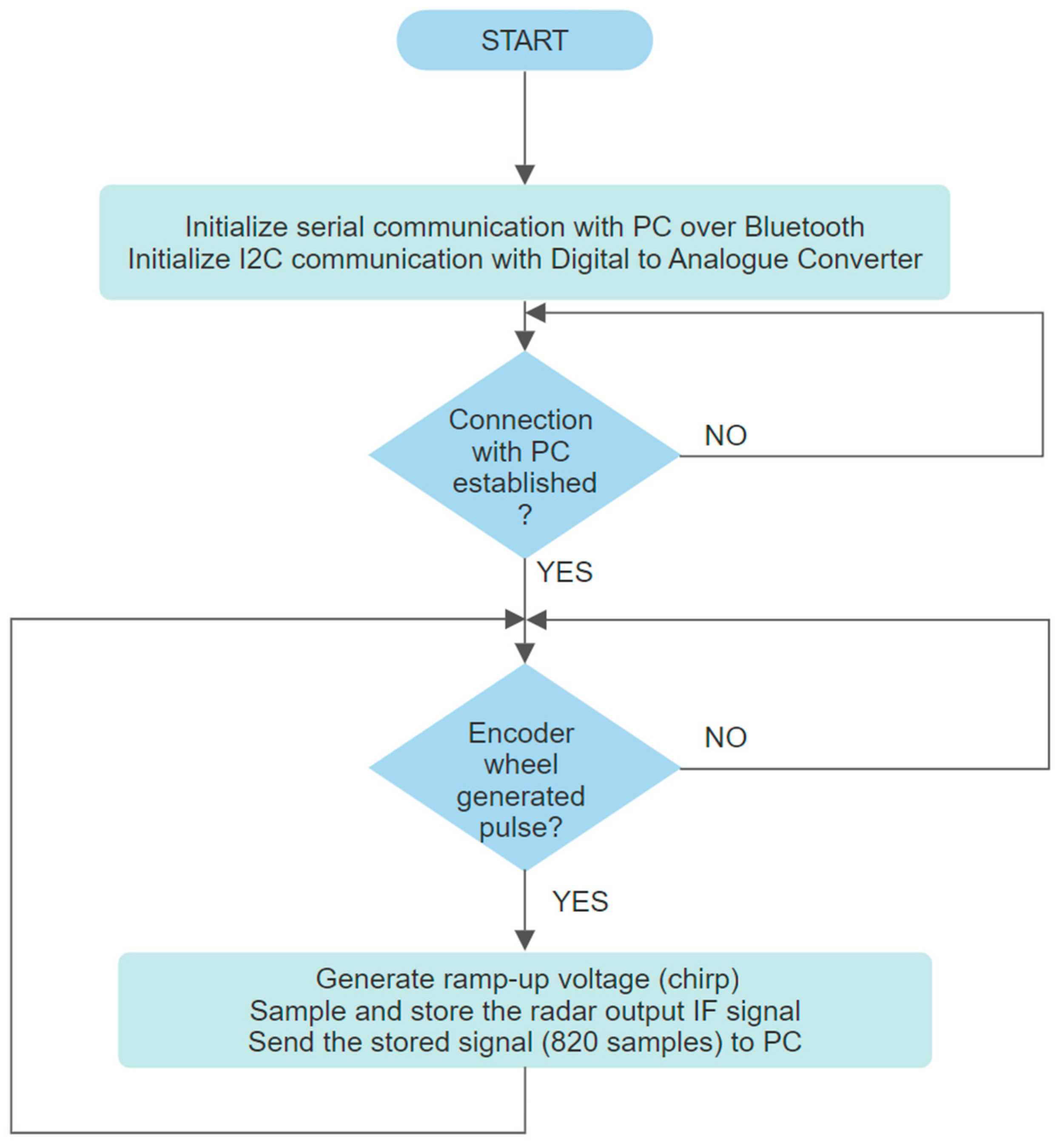
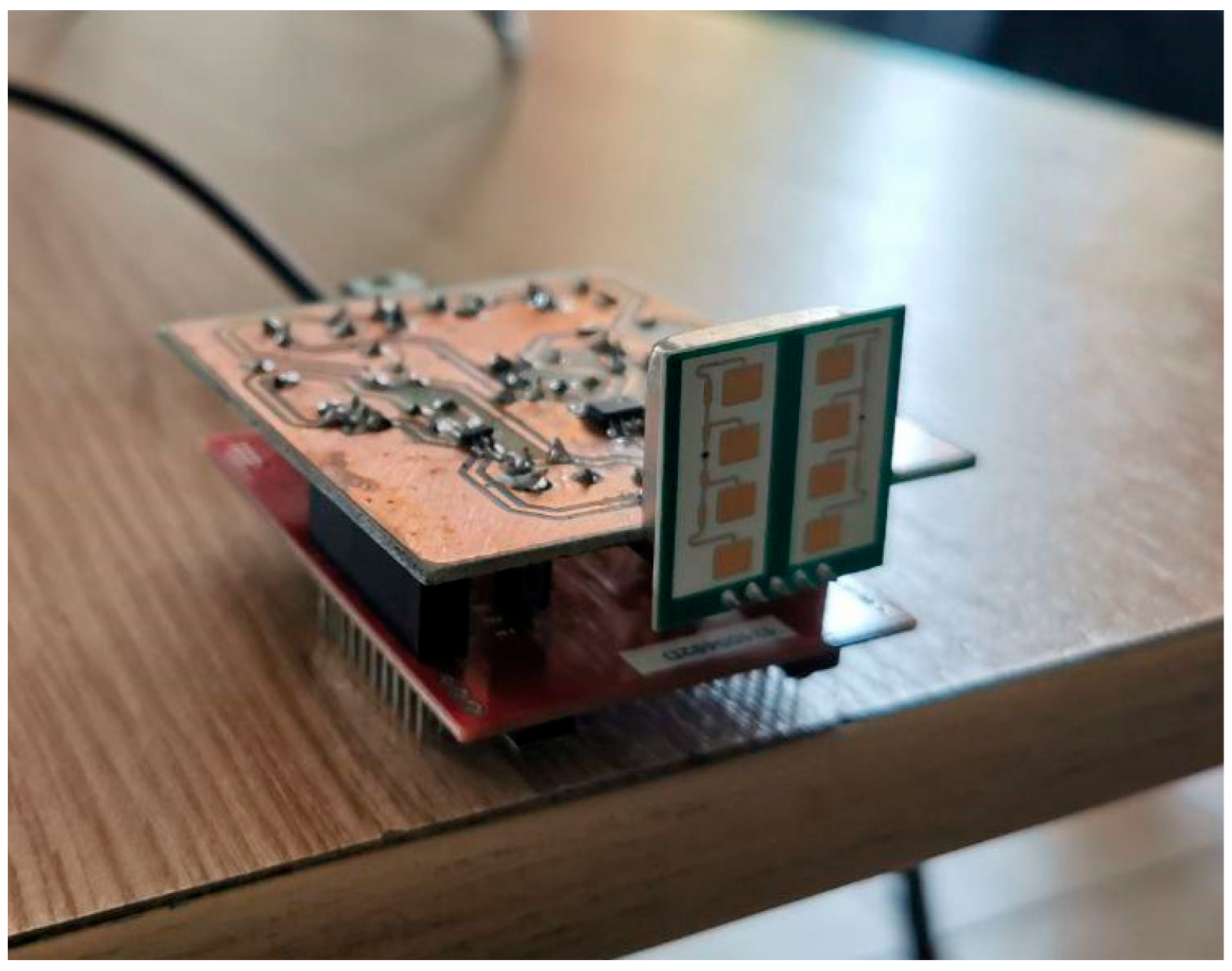
2.2. GPR Implementation
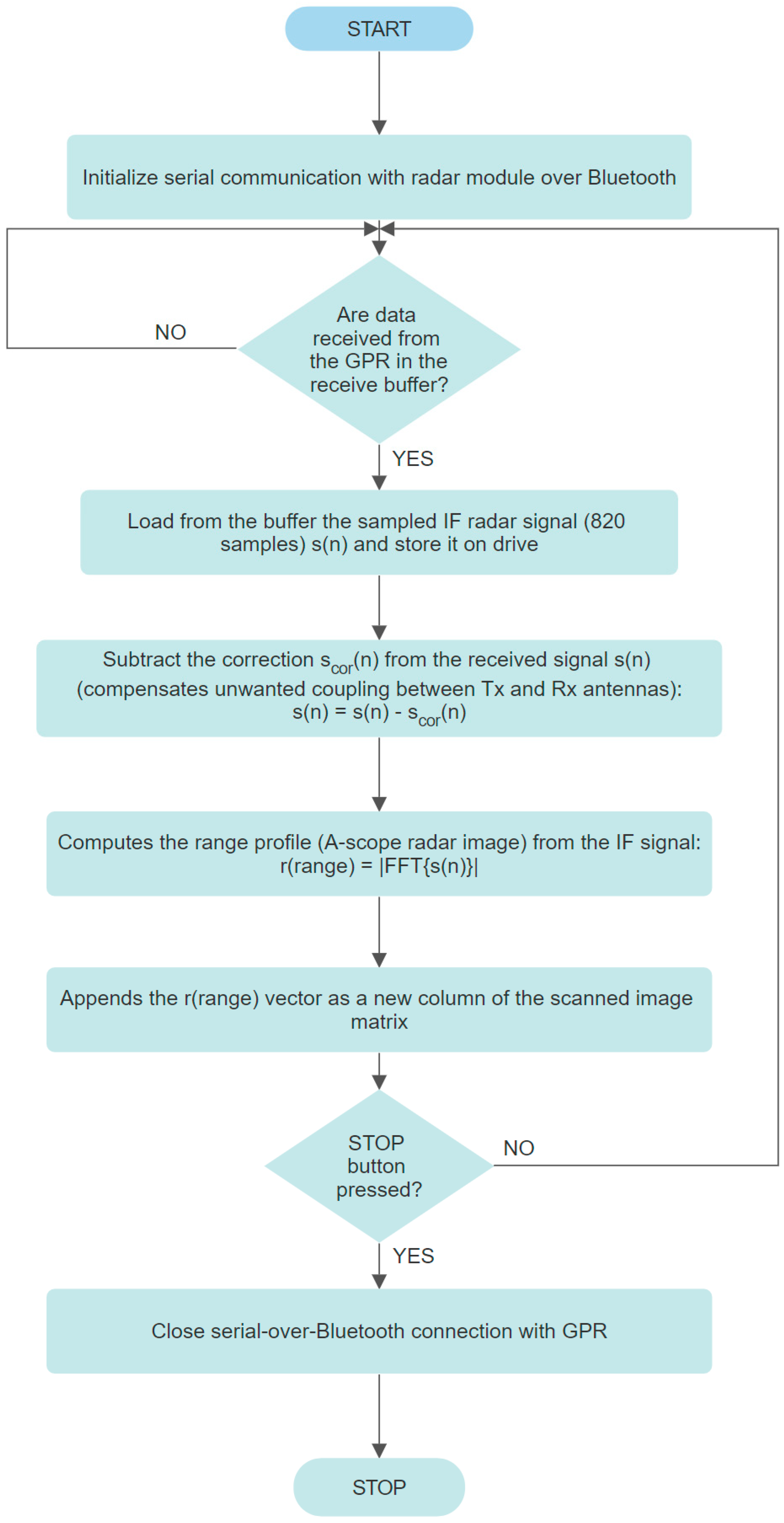
3. Methodology
4. Results
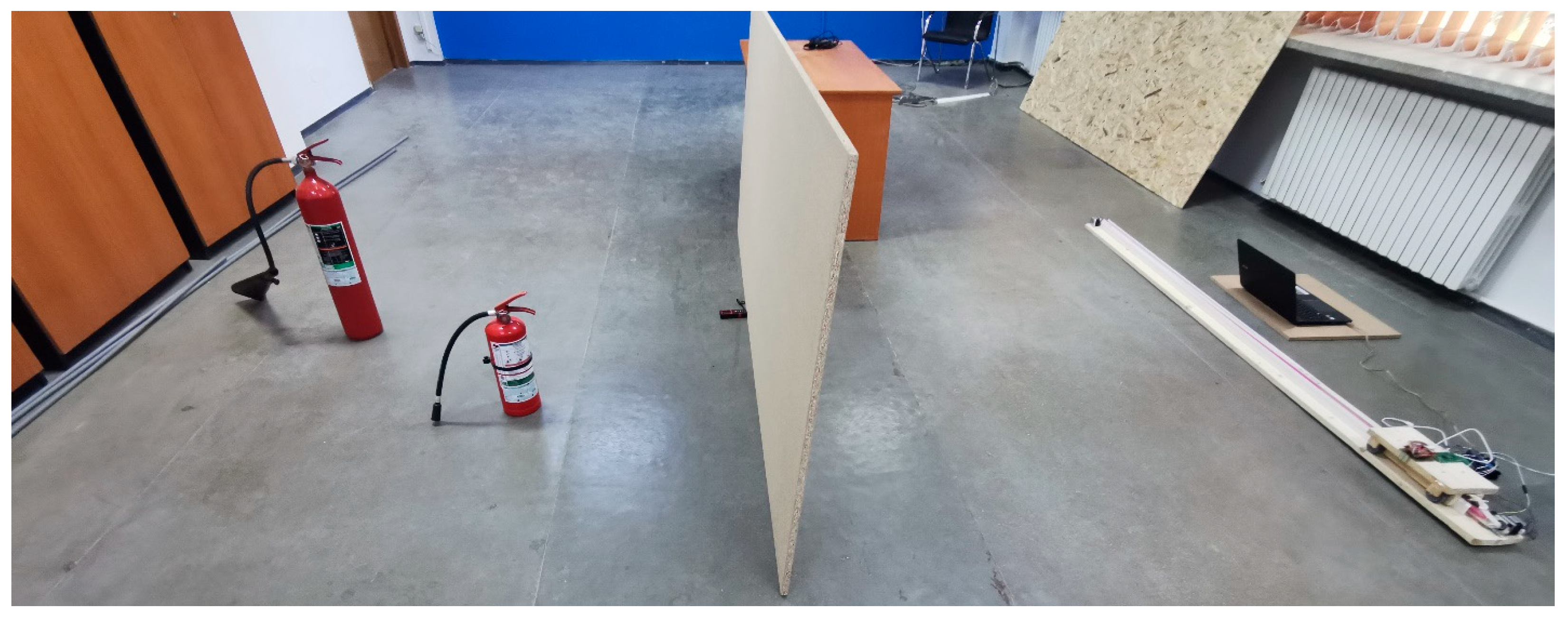
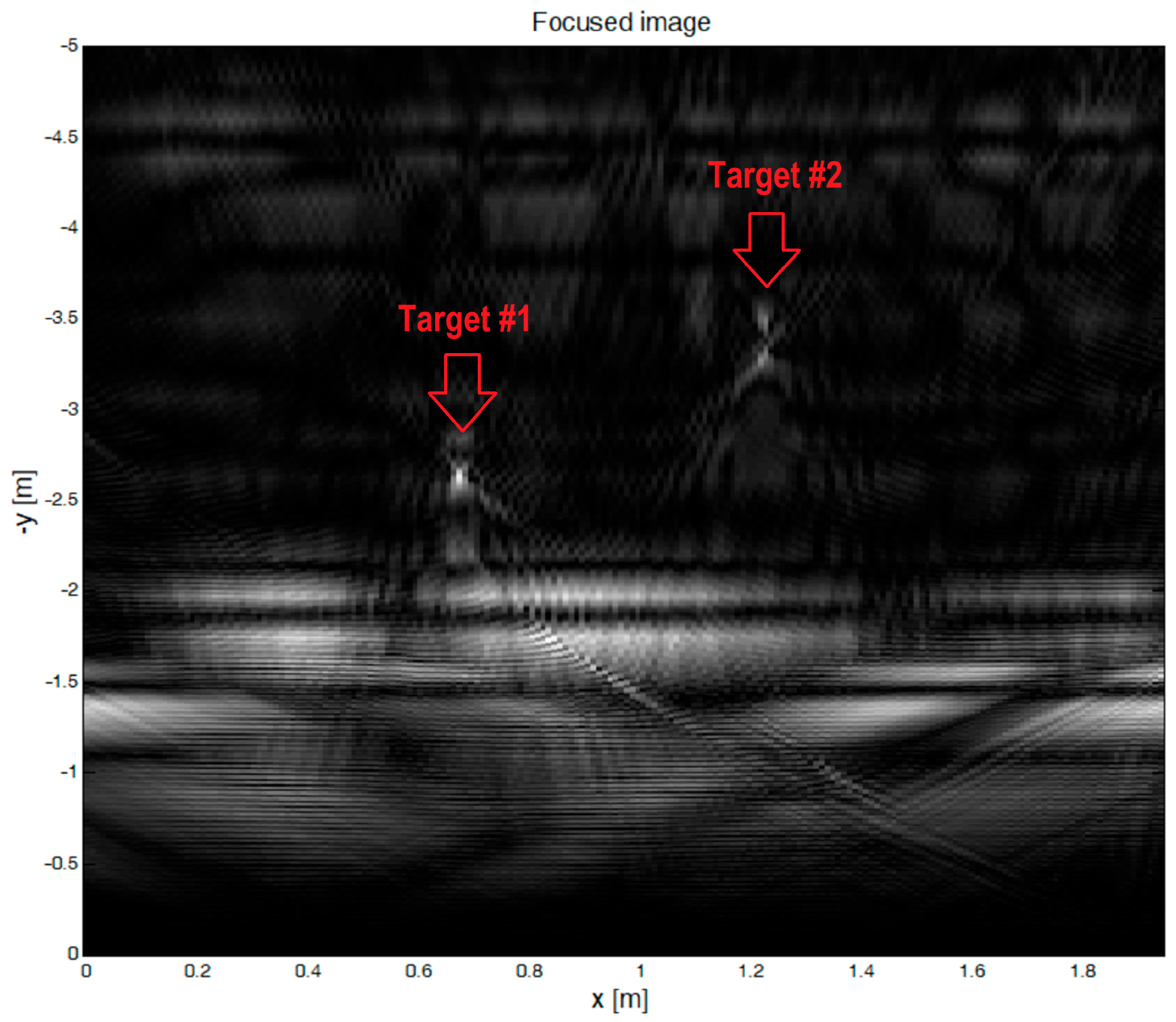
4.1. GB-SAR Results
4.2. GPR Results
5. Discussion
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, W.; Xu, Z.; Guo, S.; Jia, Y.; Wang, L.; He, T.; Shao, H. MIMO through-wall-radar down-view imaging for moving target with ground ghost suppression. Digit. Signal Process. 2023, 134, 103886. [Google Scholar] [CrossRef]
- Saad, M.; Maali, A.; Salah Azzaz, M.; Benssalah, M. An efficient FPGA-based implementation of UWB radar system for through-wall imaging. Int. J. Commun. Syst. 2023, 36, e5510. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar: Theory and Applications, 1st ed.; Elsevier Science: Amsterdam, The Netherlands, 2009; pp. 1–41. [Google Scholar]
- Davis, J.L.; Annan, P. Ground-Penetrating Radar for High-Resolution Mapping of Soil and Rock Stratigraphy. Geophys. Prospect. 1989, 37, 531–551. [Google Scholar] [CrossRef]
- Blindow, N. Ground Penetrating Radar. In Groundwater Geophysics—A Tool for Hydrology; Kirsch, R., Ed.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 227–252. [Google Scholar] [CrossRef]
- Lowe, K.M.; Wallis, L.A.; Pardoe, C.; Marwick, B.; Clarkson, C.J.; Manne, T.; Smith, M.A.; Fullagar, R. Ground-penetrating radar and burial practices in western Arnhem Land, Australia. Archaeol. Ocean. 2014, 49, 148–157. [Google Scholar] [CrossRef]
- Burr, R.; Schartel, M.; Schmidt, P.; Mayer, W.; Walter, T.; Waldschmidt, C. Design and Implementation of a FMCW GPR for UAV-based Mine Detection. In Proceedings of the IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Munich, Germany, 15–17 April 2018. [Google Scholar] [CrossRef]
- Wai-Lok Lai, W.; Derobert, X.; Annan, P. A review of Ground Penetrating Radar application in civil engineering: A 30-year journey from Locating and Testing to Imaging and Diagnosis. NDT E Int. 2018, 96, 58–78. [Google Scholar] [CrossRef]
- Yigit, E.; Demirci, S.; Ozdemir, C. Ground Penetrating Radar Image Focusing using Frequency-Wavenumber based Synthetic Aperture Radar Technique. In Proceedings of the 2007 International Conference on Electromagnetics in Advanced Applications, Torino, Italy, 17–21 September 2007; pp. 344–347. [Google Scholar] [CrossRef]
- Ozdemir, C.; Demirci, S.; Yigit, E. Practical Algorithms to Focus B-scan GPR Images: Theory and Application to Real Data. PIERS B 2008, 6, 109–122. [Google Scholar] [CrossRef]
- Baer, C.; Gutierrez, S.; Jebramcik, J.; Barowski, J.; Vega, F.; Rolfes, I. Ground Penetrating Synthetic Aperture Radar Imaging Providing Soil Permittivity Estimation. In Proceedings of the 2017 IEEE MTT-S International Microwave Symposium (IMS), Honolulu, HI, USA, 4–9 June 2017; pp. 1367–1370. [Google Scholar] [CrossRef]
- Ustun, D.; Yigit, E.; Toktas, A.; Sabanci, K.; Duysak, H. GPR Image Focusing Using Matched Filter Algorithm. In Proceedings of the 2018 XXIIIrd International Seminar/Workshop on Direct and Inverse Problems of Electromagnetic and Acoustic Wave Theory (DIPED), Tbilisi, Georgia, 24–27 September 2018; pp. 242–245. [Google Scholar] [CrossRef]
- Walabot Tech Brief. Available online: https://site.walabot.com/docs/walabot-tech-brief-416/ (accessed on 29 March 2024).
- Koul, S.K.; Bharadwaj, R. UWB and 60 GHz Radar Technology for Vital Sign Monitoring, Activity Classification and Detection. In Wearable Antennas and Body Centric Communication; Lecture Notes in Electrical Engineering; Springer: Singapore, 2021; Volume 787. [Google Scholar] [CrossRef]
- Gorham, L.A.; Moore, L.J. SAR image formation toolbox for MATLAB. In Proceedings of the SPIE 7699 Algorithms for Synthetic Aperture Radar Imagery XVII, 769906, SPIE Defense, Security, and Sensing, Orlando, FL, USA, 5–9 April 2010. [Google Scholar] [CrossRef]
- Henrik’s Blog. Available online: https://hforsten.com/backprojection-backpropagation.html (accessed on 9 February 2024).













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paun, M. Through-Wall Imaging Using Low-Cost Frequency-Modulated Continuous Wave Radar Sensors. Remote Sens. 2024, 16, 1426. https://doi.org/10.3390/rs16081426
Paun M. Through-Wall Imaging Using Low-Cost Frequency-Modulated Continuous Wave Radar Sensors. Remote Sensing. 2024; 16(8):1426. https://doi.org/10.3390/rs16081426
Chicago/Turabian StylePaun, Mirel. 2024. "Through-Wall Imaging Using Low-Cost Frequency-Modulated Continuous Wave Radar Sensors" Remote Sensing 16, no. 8: 1426. https://doi.org/10.3390/rs16081426
APA StylePaun, M. (2024). Through-Wall Imaging Using Low-Cost Frequency-Modulated Continuous Wave Radar Sensors. Remote Sensing, 16(8), 1426. https://doi.org/10.3390/rs16081426