


A Systematic Review into the Application of Ground-Based Interferometric Radar Systems for Bridge Monitoring




Abstract

1. Introduction
2. Methodology
3. Bridge Structural Health Monitoring Systems
- Temporal resolution: This refers to the “revisit time”, i.e., the time interval between successive satellite observations of the same location on Earth [18]. Revisit times can span several days, making satellite monitoring unsuitable for real-time applications.
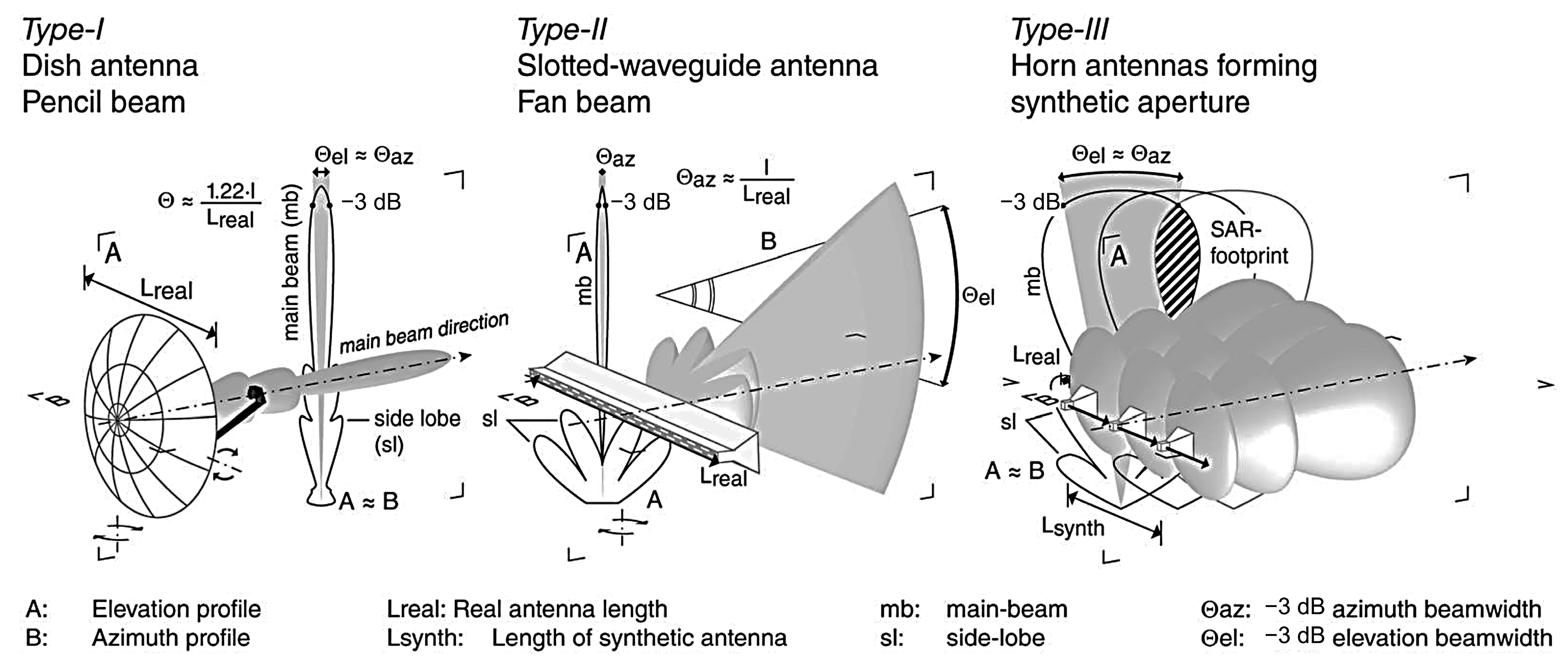
4. GBIR Principles
5. Statistics, Applications, and System Characteristics of GBIR for Bridge Monitoring
5.1. Bridge Function
5.2. Bridge Materials
5.3. GBIR in Bridge Monitoring: Systems, Signals, and Synergies
5.3.1. GBIR System Categories in Bridge Monitoring
5.3.2. GBIR Characteristics

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GBIR Type | No. | BF | CF (GHz) | B (MHz) | FM | ΔR (m) | ΔCR (mrad) | Image | SF (Hz) | (m) | Accuracy (mm) | Developer | References |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
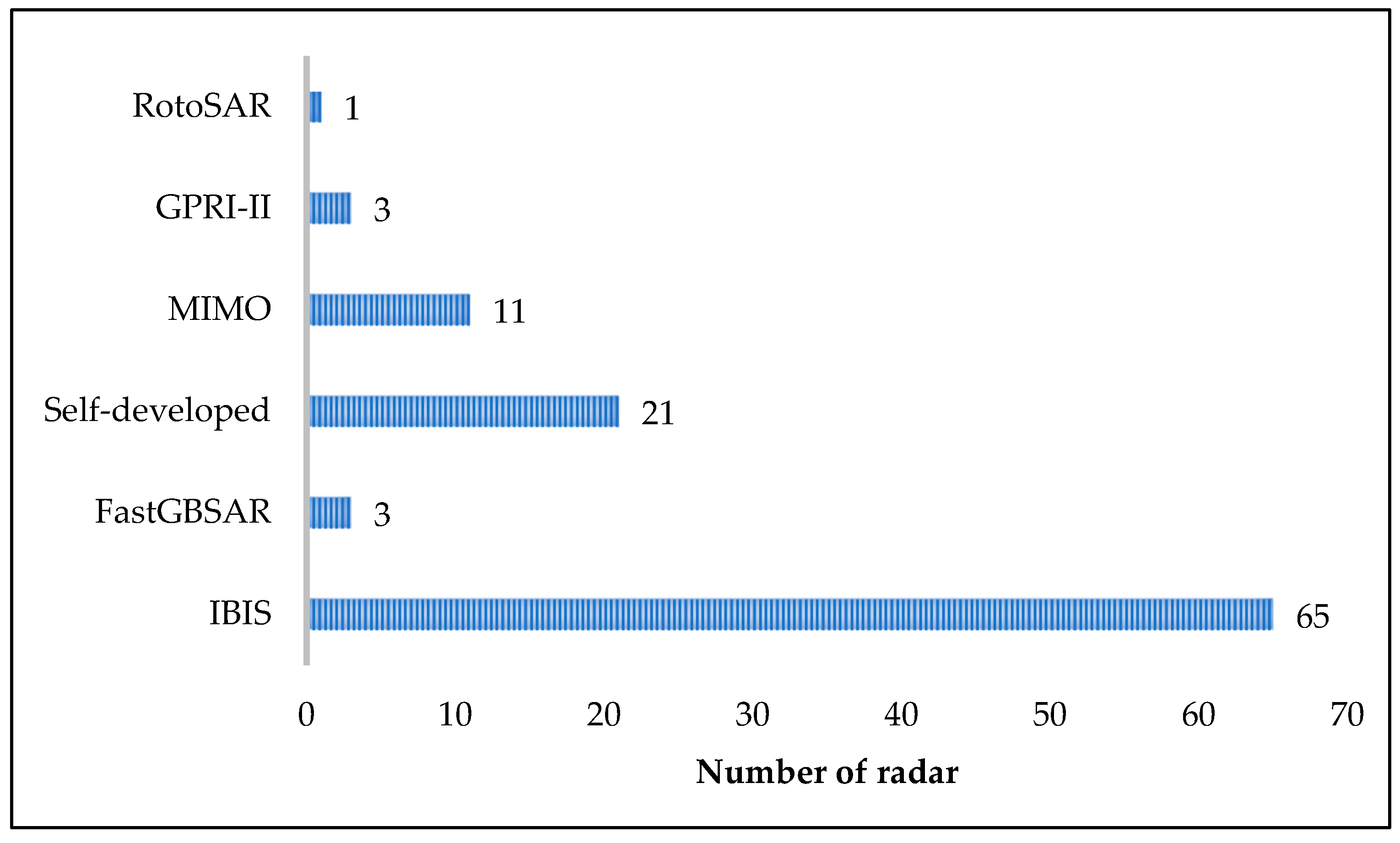
| IBIS | 65 | Ku | 16.9–17.3 | 300 | FMCW SFCW | 0.5–0.71 | 4.4 | 1D/2D | 200 | 500–1000 | 0.01–0.1 | IDS | [8,9,16,20,23,28,29,37,39,40,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95,96,97,98,99,100,101,102,103,104,105,106,107,108] |
| FastGBSAR | 3 | Ku | 17.2–17.5 | 300 | FMCW | 0.5 | 4.8 | 1D/2D | 4000 | 4000 | 0.01–0.1 | MetaSensing | [35,109,110] |
| SD 1 Parabolic dish radar | 21 | X or K | - | - | SFCW | - | NON | 1D | - | - | - | LANL 2 | [13] |
| SD radar | Ku | 16 | 300 | FMCW | 0.5 | NON | 1D | - | 580 | - | Southeast University | [25,33,34,111] | |
| Ku | 16.75 | 350–380 | SFCW | 0.4 | NON | 1D | 30 | - | <0.1 | University of Florence | [38,112,113,114,115] | ||
| K | 24 | 3000 | FMCW | 0.05 | NON | 1D | 50 | 70 | <0.02 | CTTC 3 | [23] | ||
| K | - | 1000 | FMCW | 0.15 | NON | 1D | - | 70 | - | SKLHSBS 4 NUDT 5 | [116] | ||
| SD mm-wave radar | Ka V | 36.05 77 | 300 4000 | FMCW FMCW | 0.5 0.0489 | NON NON | 1D 1D | - - | - 12 | sub-mm - | HRBEU 6 CAS 7 | [44,117,118] [119,120] | |
| SD radar SAR | Ku | 15.5 | 1000 | SFCW | 0.15 | 4.75 | 2D | - | - | - | University of Florence | [121,122,123] | |
| SD lightweight radar | V | 60.25 | 3250 | FMCW | 0.05 | NON | 1D | 20 | - | - | Southeast University | [124] | |
| SD-CW | S | - | - | CW | - | NON | - | - | - | - | University of Florence | [113] | |
| MIMO (IBIS-FM) | 11 | Ku | 17.2 | 400 | SFCW | - | - | - | 132 | - | - | IDS | [15,30,31,125] |
| MIMO (FastGBSAR) | Ku | 17.2 | - | FMCW | 0.5 | - | 2D | - | 4000 | 0.01 | MetaSensing | [106,126] | |
| SD MIMO (CS) | - | - | - | SFCW | 0.47 | 50 | 2D | 31.4 | - | 0.1 | University of Florence | [45] | |
| SD MIMO | Ku | 16.2 | 400–1000 | FMCW | 0.375 | 6.8–7.4 | 2D | - | 50–500 | - | Beijing Institute of Technology | [48,49] | |
| K | 24 | 150 | FMCW | - | - | 2D | - | 80 | 0.13 | Telkom University | [127] | ||
| W | 77 | 103 | FMCW | 1.45 | 30.5 | 2D | - | - | 0.04 | University of Florence | [46] | ||
| GPRI | 3 | Ku | 17.1–17.3 | 200 | FMCW | 0.75 | 6.8 | 1D–2D | 4000 | 5–10,000 | 0.02~4 | Gamma 8 | [51,128,129] |
| SD RotoSAR | 1 | X | 10 | 160 | SFCW | 0.94 | - | 2D | - | - | - | University of Florence | [47] |
5.3.3. GBIR Signal Analysis and Processing Techniques for Bridge Monitoring
5.3.4. GBIR and Integrated Technologies
| SHM Sensors | Description | References |
|---|---|---|
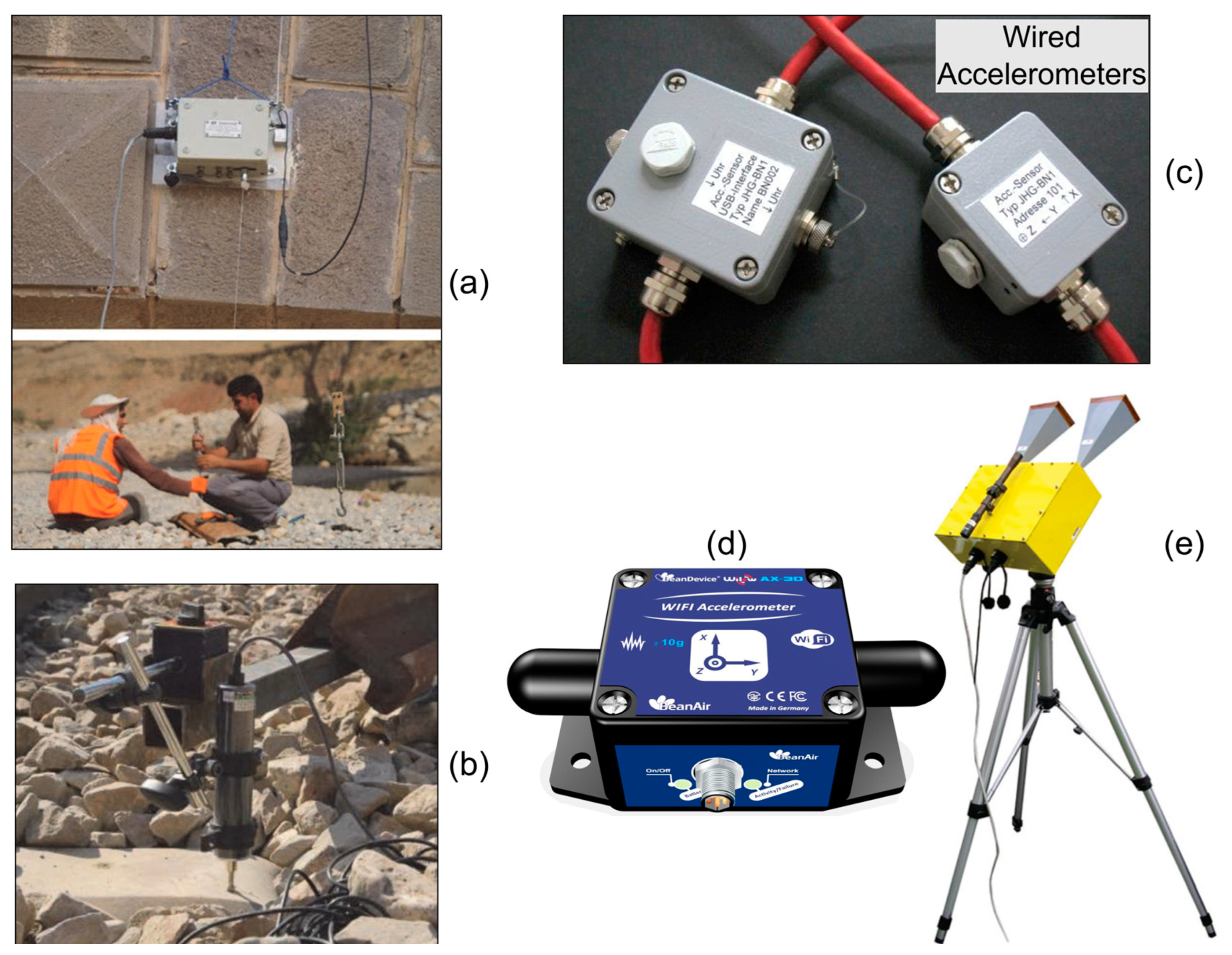
| Accelerometer | Accelerometers are frequently paired with GBIR systems due to their high sampling rates, making them ideal for dynamic analysis. Deflection data can be obtained via double integration, particularly with DC response accelerometers, allowing for an effective comparison and validation of GBIR-derived displacement outputs. | [9,13,23,33,34,35,40,54,55,63,64,72,82,83,87,90,91,92,93,94,95,100,102,105,114,119,120] |
| Camera | High-resolution digital cameras, including systems developed by Imetrum Ltd., have been used for dynamic displacement monitoring and mode shape identification. While their sampling frequencies are generally lower than GBIR, they can exceed 100 Hz, offering reliable visual data for structural dynamic investigations. | [8,33,34,55,80,86,88,107,111,124,134] |
| TLS | TLS systems provide a high-resolution 3D geometry of structures and have been employed in dynamic tests with sufficiently high acquisition rates. TLS outputs have been benchmarked against both GBIR and accelerometer data for validation in SHM applications. | [9,64,97,104,108,110] |
| Levelling | Levelling systems, including barcode and hydrostatic levelling, are used alongside GBIR for static deformation tracking. These systems are particularly suited for scenarios requiring high sensitivity in long-term monitoring. | [37,56,68,74,86,97] |
| Strain Measurements | Strain measurement systems, including traditional strain gauges and advanced Fibre Bragg Grating (FBG) sensors, help assess relative displacements and strain fields. Their data have been cross-validated with GBIR in various studies focusing on bridge monitoring. | [25,29,34,59,60] |
| LVDT | LVDT sensors are used to acquire accurate deflection data during dynamic testing, such as modal analysis. However, their accuracy may be affected by referring errors, which must be accounted for during interpretation. | [40,85,92,93,95] |
| GPS | Global Positioning System (GPS) modules integrated with GBIR can enhance geospatial accuracy by updating global position and time references. Structural-mounted GPS sensors operating at around 50 Hz have also been used to directly measure dynamic displacements for comparison with GBIR outputs. | [51,72,97,128,129] |
| Laser Tracker | Laser trackers are used alongside GBIR systems for displacement measurements, with sampling frequencies ranging from 100 to 1000 Hz. This makes them effective not only for geometry acquisition but also for dynamic monitoring when used alongside GBIR systems. | [60,86,119,120] |
| Inductive Gauge | Inductive gauges serve as a reliable reference for displacement monitoring and natural frequency estimation. Their suitable sampling frequencies and high sensitivity make them effective in validating GBIR measurements. | [79,89,99] |
| Ground Penetrating Radar (GPR) | GPR systems detect internal features like rebar, cracks, or moisture within structures. They are especially useful for identifying internal anomalies in sections where GBIR data indicate discrepancies. | [83,84] |
6. Conclusions and Future Trends
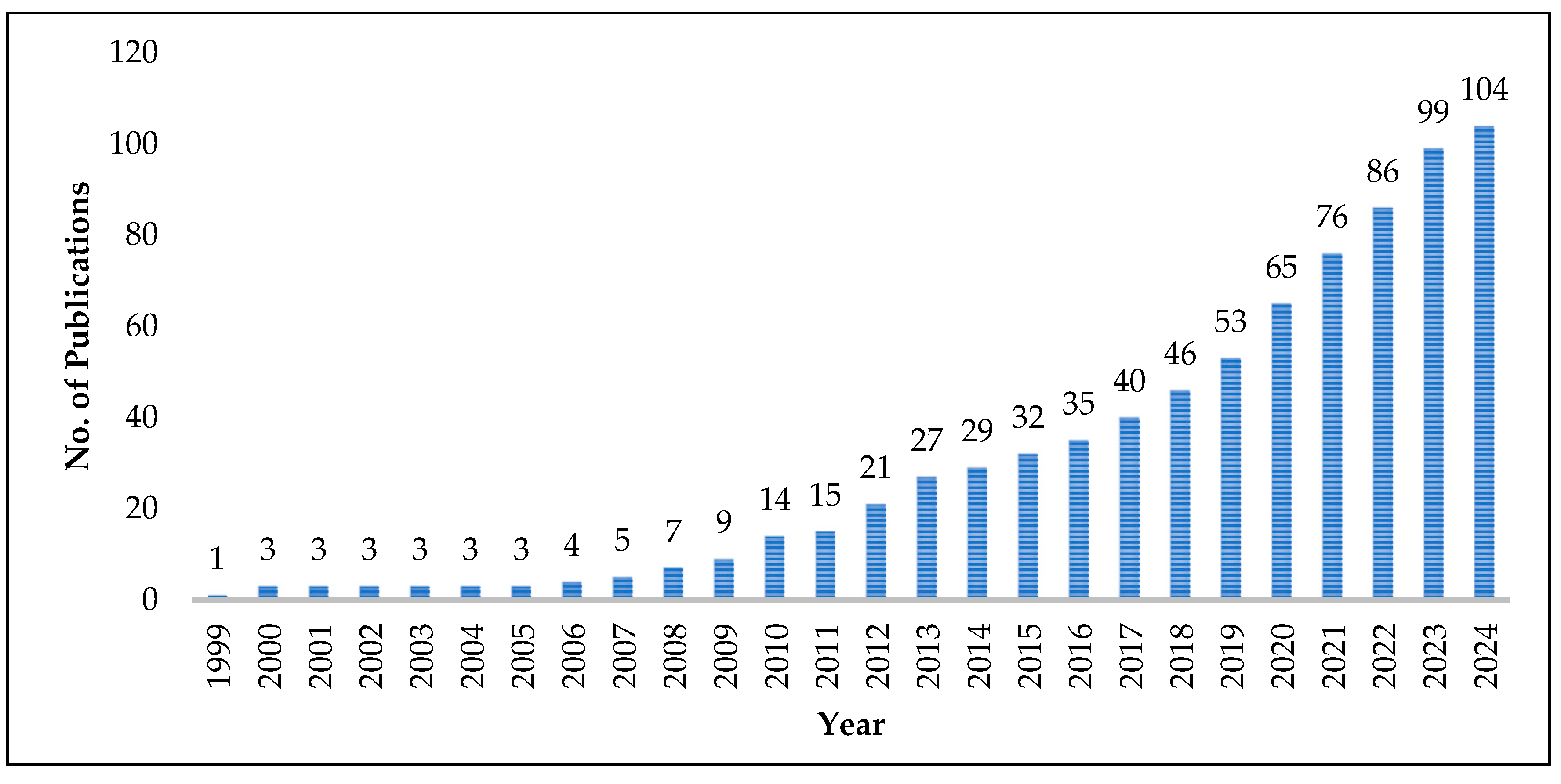
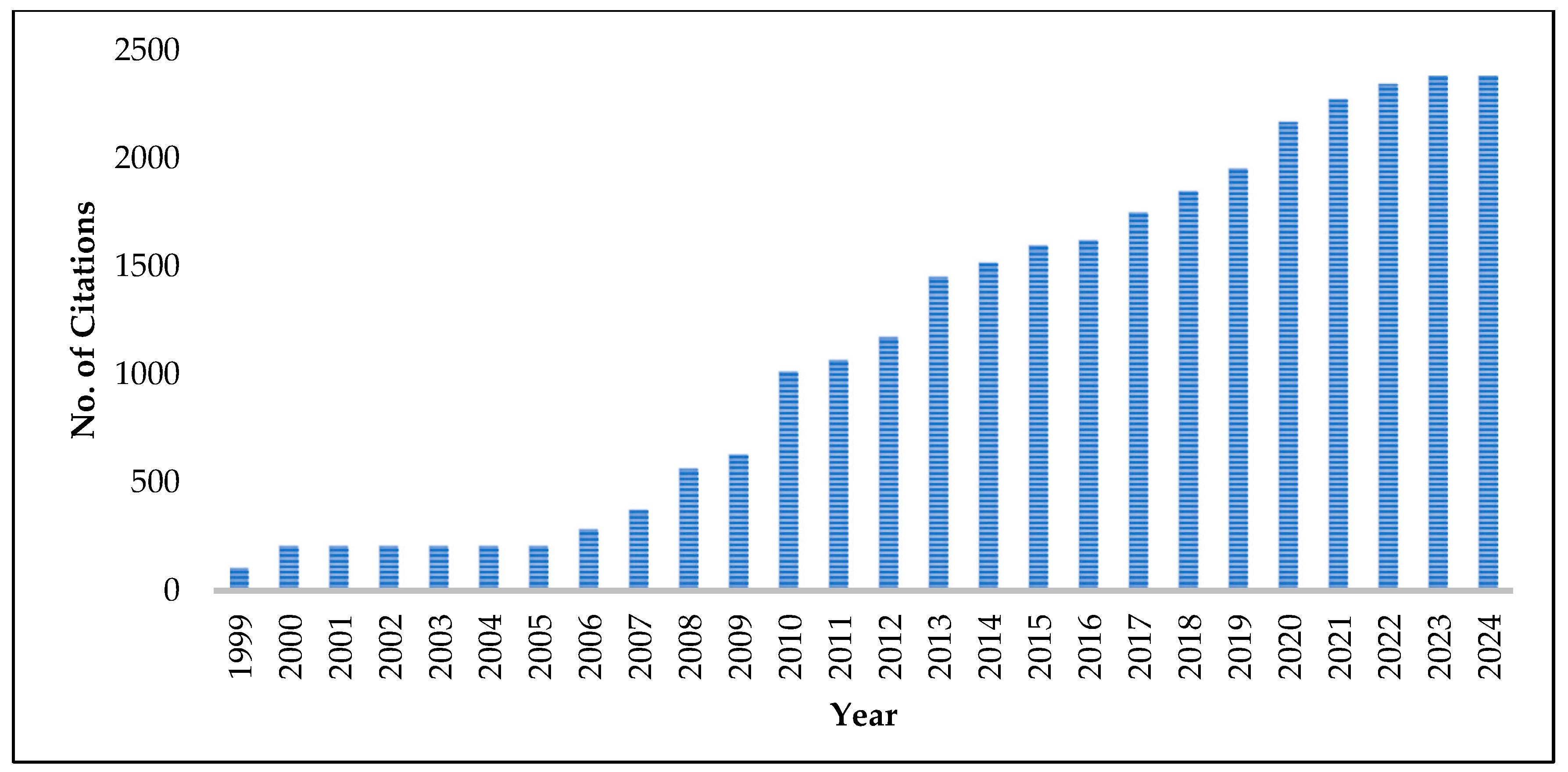
- GBIR has demonstrated significant potential to lead future advancements in bridge monitoring. The growing number of publications indicates increasing interest in applying GBIR to bridge monitoring over the past two decades. However, further research is required to deal with its limitations.
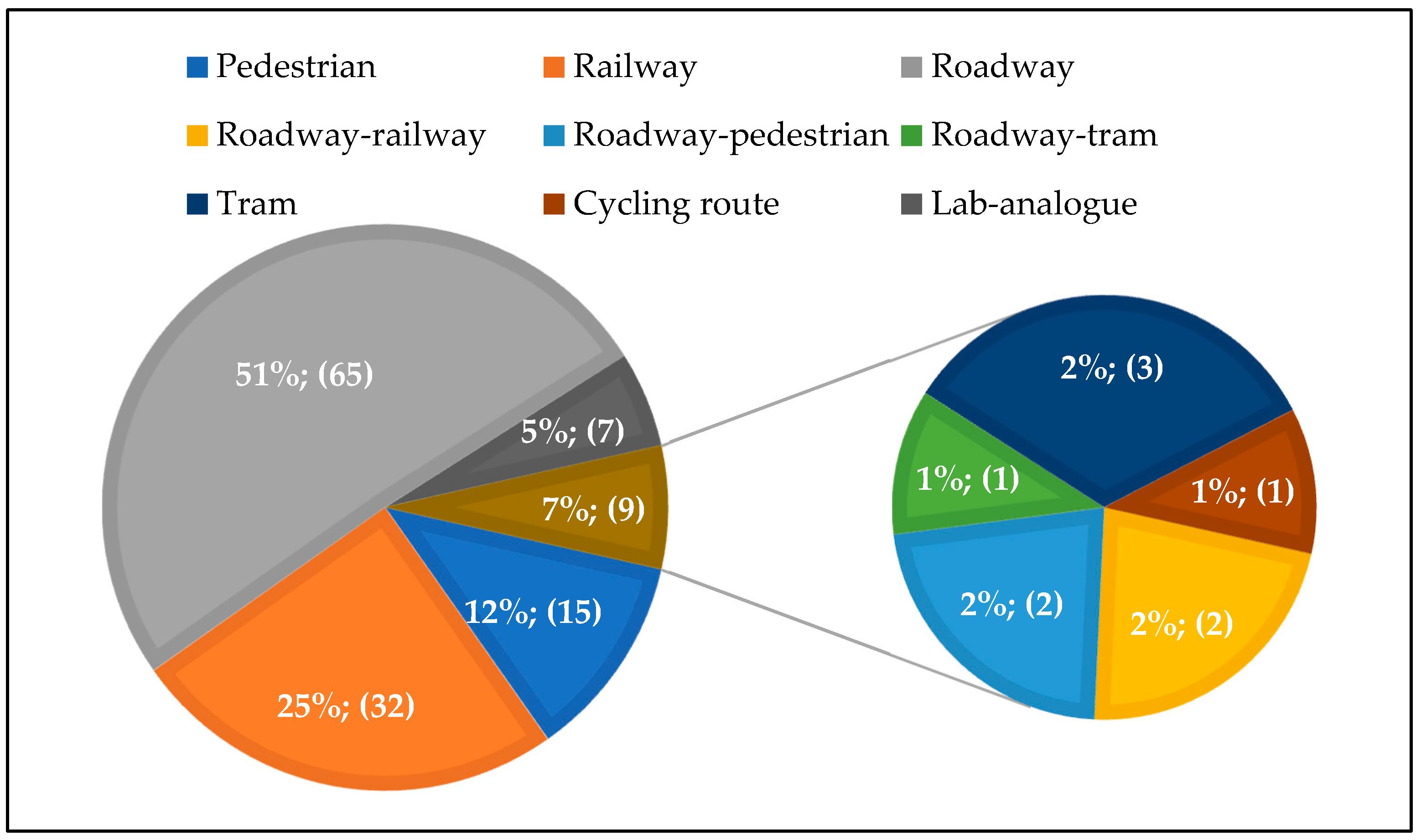
- Most studies focus on roadway and railway bridges, which collectively represent 76% of all monitored cases. Other bridge types, such as pedestrian and heritage structures, are rarely investigated with GBIR.
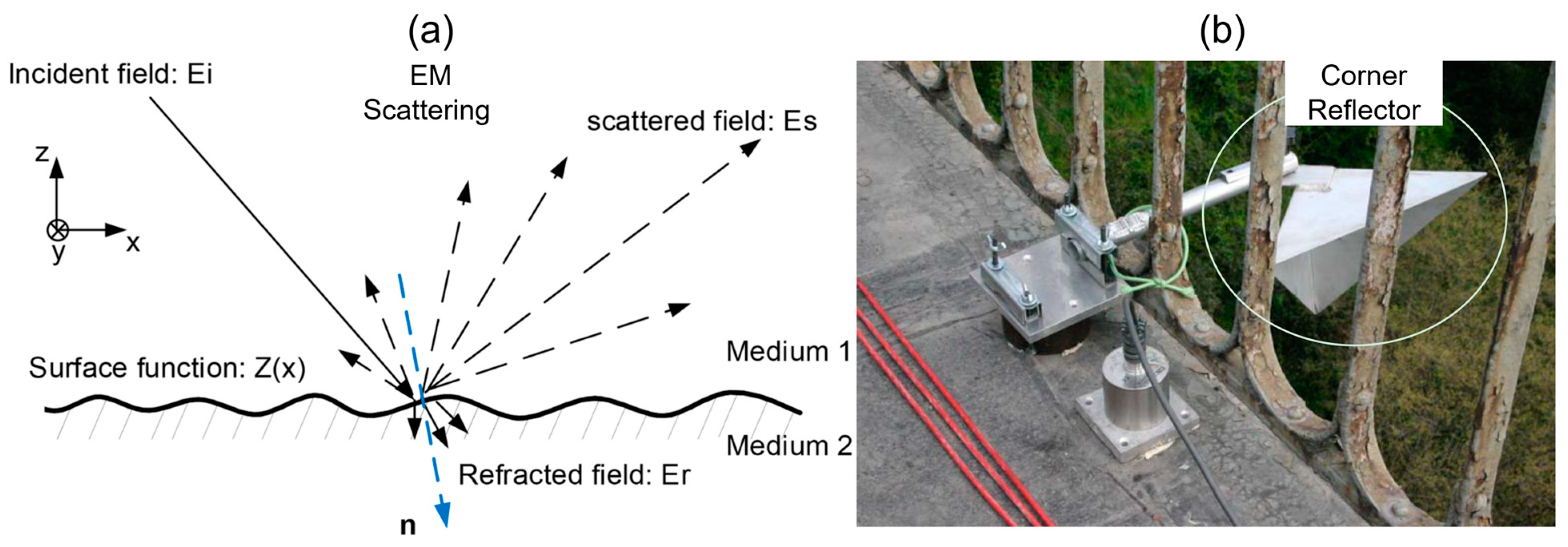
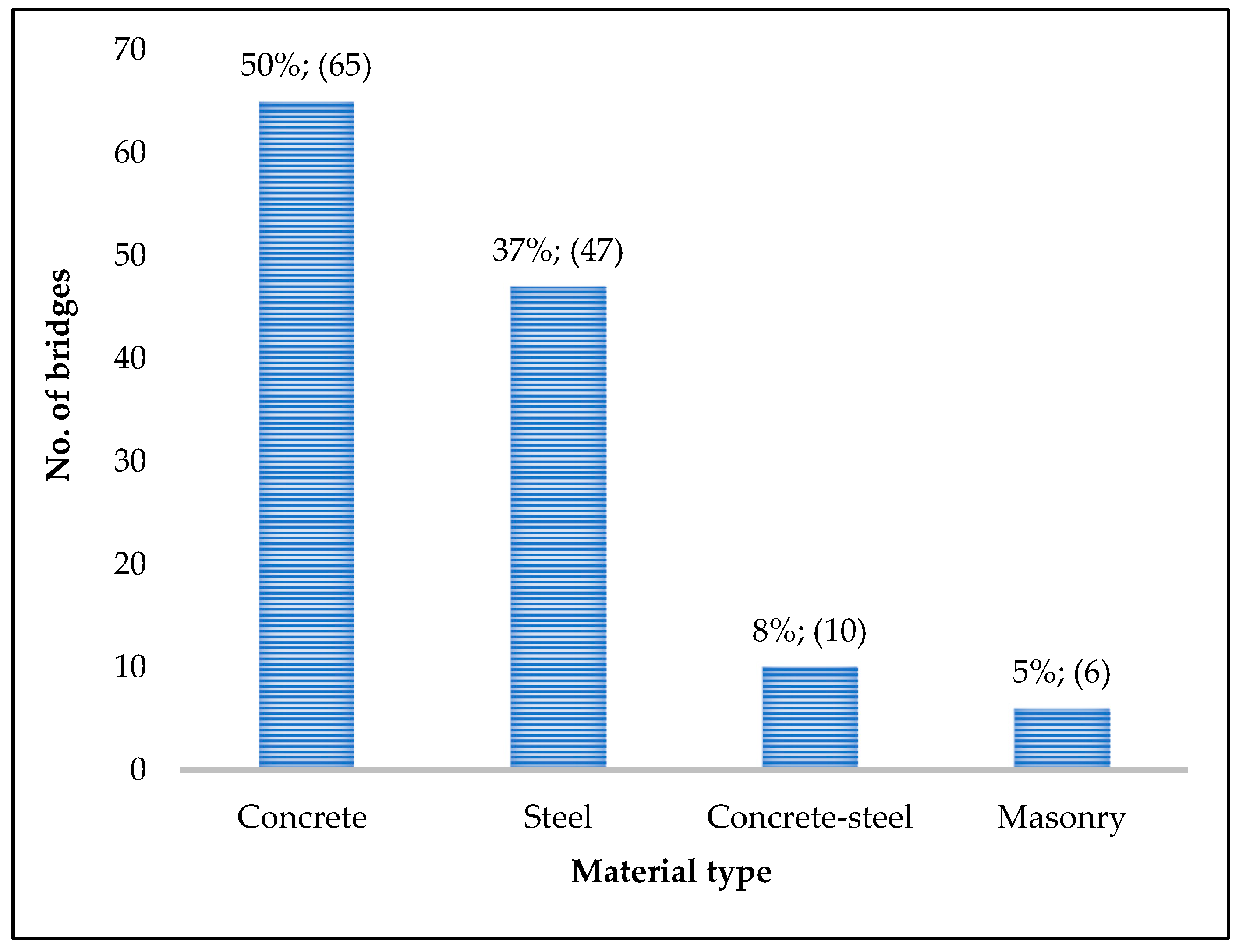
- GBIR performance is sensitive to the material type of the monitored structure. This is particularly relevant in masonry bridges, which often require the installation of external corner reflectors. To date, only 5% of studies have addressed masonry structures, whereas steel and concrete are predominant in the literature.
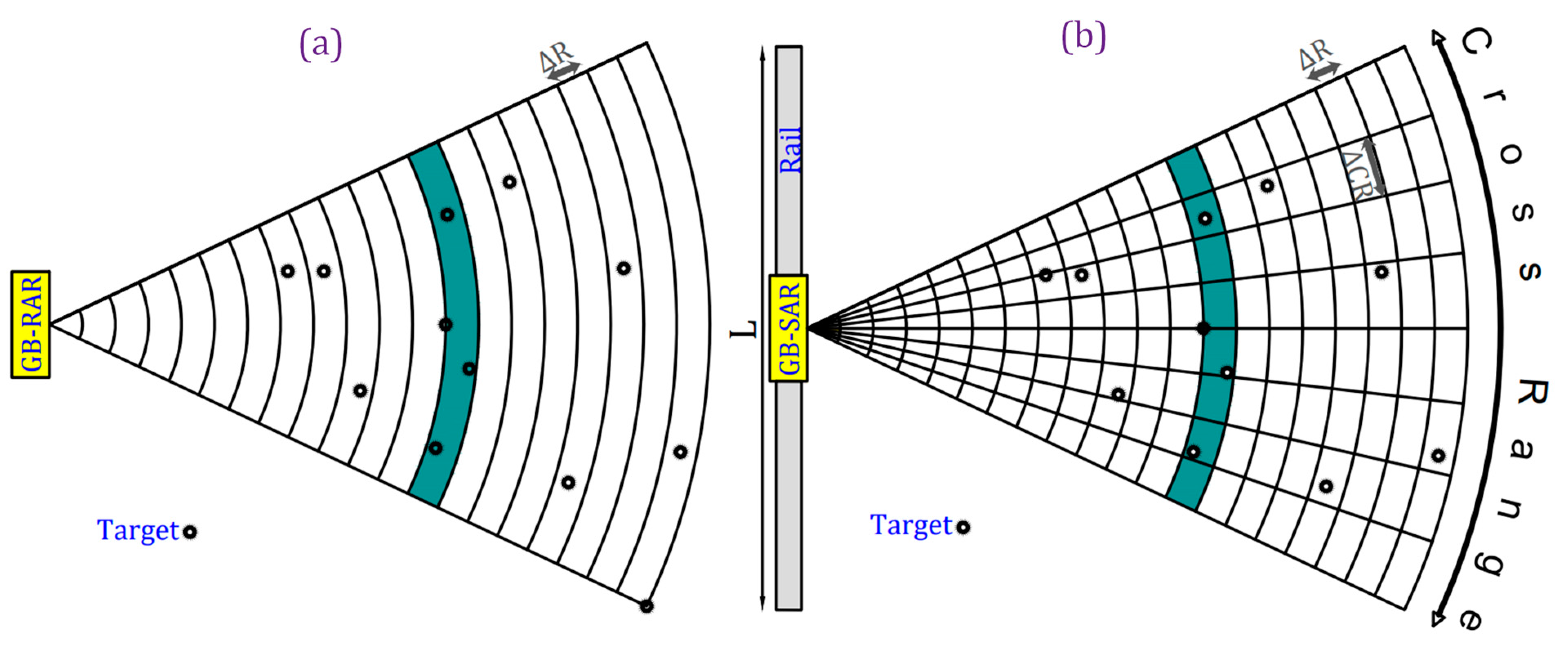
- GBIR systems can be classified by their working principles and goals. Ground-Based Real Aperture Radar (GB-RAR) systems (e.g., IBIS-S) are ideal for dynamic bridge monitoring but lack cross-range resolution (), limiting multiple-target distinction within the same range bin.
- A lack of studies implementing different signal processing techniques for damage detection and structural state estimation is observed. This represents a critical gap.
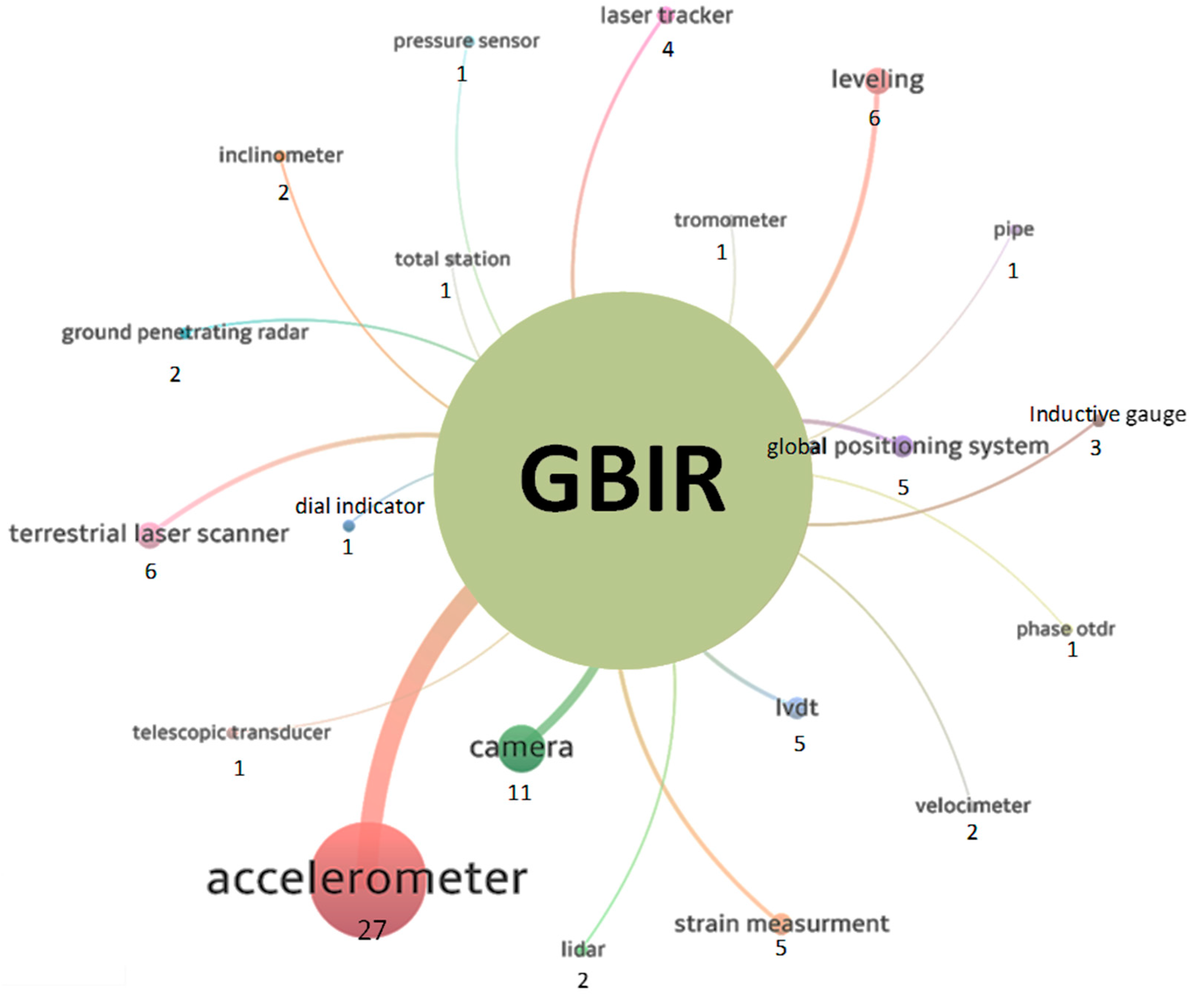
- GBIR has been used in conjunction with at least 20 other sensor technologies to enhance accuracy and validation. Amongst these, accelerometers are the most frequently employed, supporting the validation of GBIR displacement measurements.
- Nearly all existing GBIR studies focus on short-term monitoring campaigns. Long-term applications, though common for other infrastructure such as dams or landslides using Ground-Based Synthetic Aperture Radar (GB-SAR) systems (e.g., IBIS-L and GPRI), remain virtually absent for bridges in the peer-reviewed literature. This represents a significant research gap.
- Target Detection: Current GBIR systems lacking cross-range resolution () face difficulties in distinguishing multiple targets within the same range. Research into signal footprint visualisation techniques could help improve acquisition control and focus on areas of interest [10,11]. In addition, further research on advanced signal processing techniques is required to enhance target resolution [25].
- Material Sensitivity: The high sensitivity of electromagnetic waves towards different types of materials suggests that further studies are required in the future for both steel and masonry or concrete materials. For steel structures, it is suggested to apply methods to control the acquisition and range confinement. For masonry bridges, the evidence from the selected literature database shows that more in-depth investigations are required to better understand radar interaction.
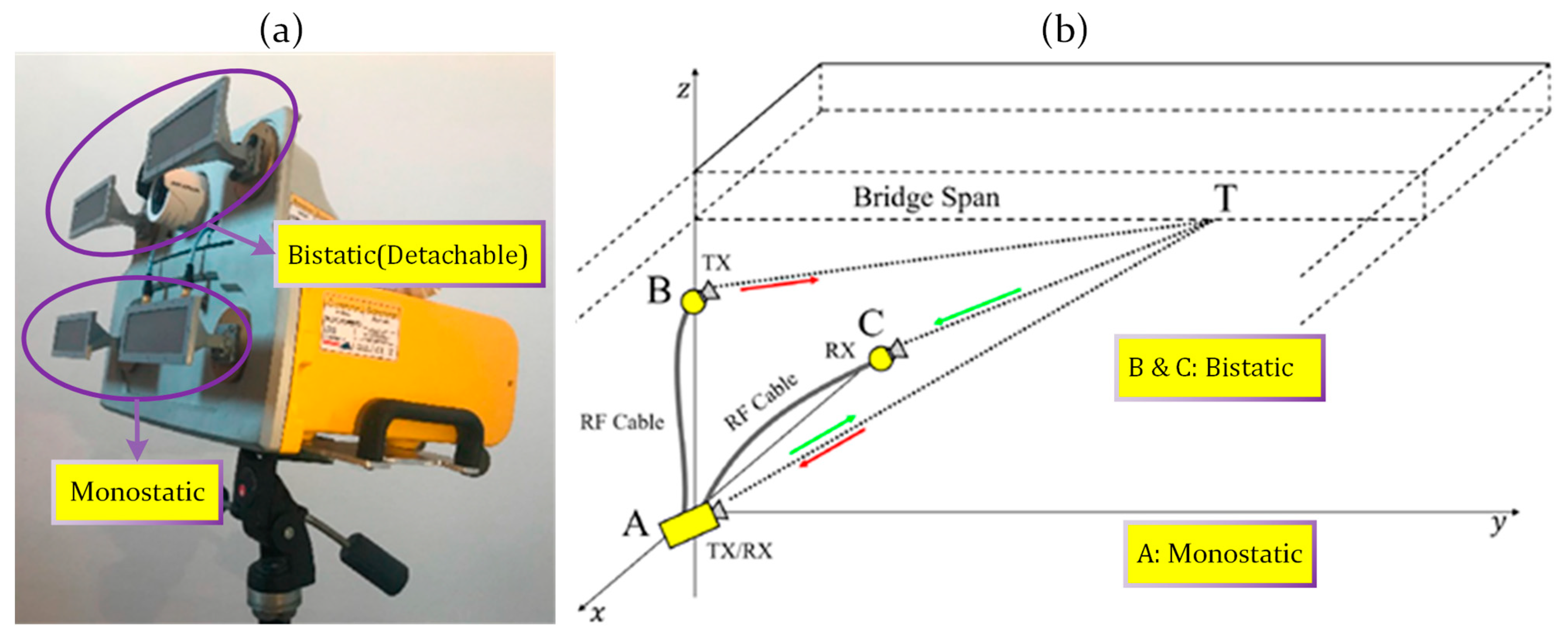
- 3-D Displacement Monitoring: Single transceiver GBIR systems cannot resolve full 3D displacement components. Potential solutions to this issue include deploying multiple synchronised GBIR units [16] or integrating radars with complementary technologies, such as high-resolution cameras and triaxial accelerometers.
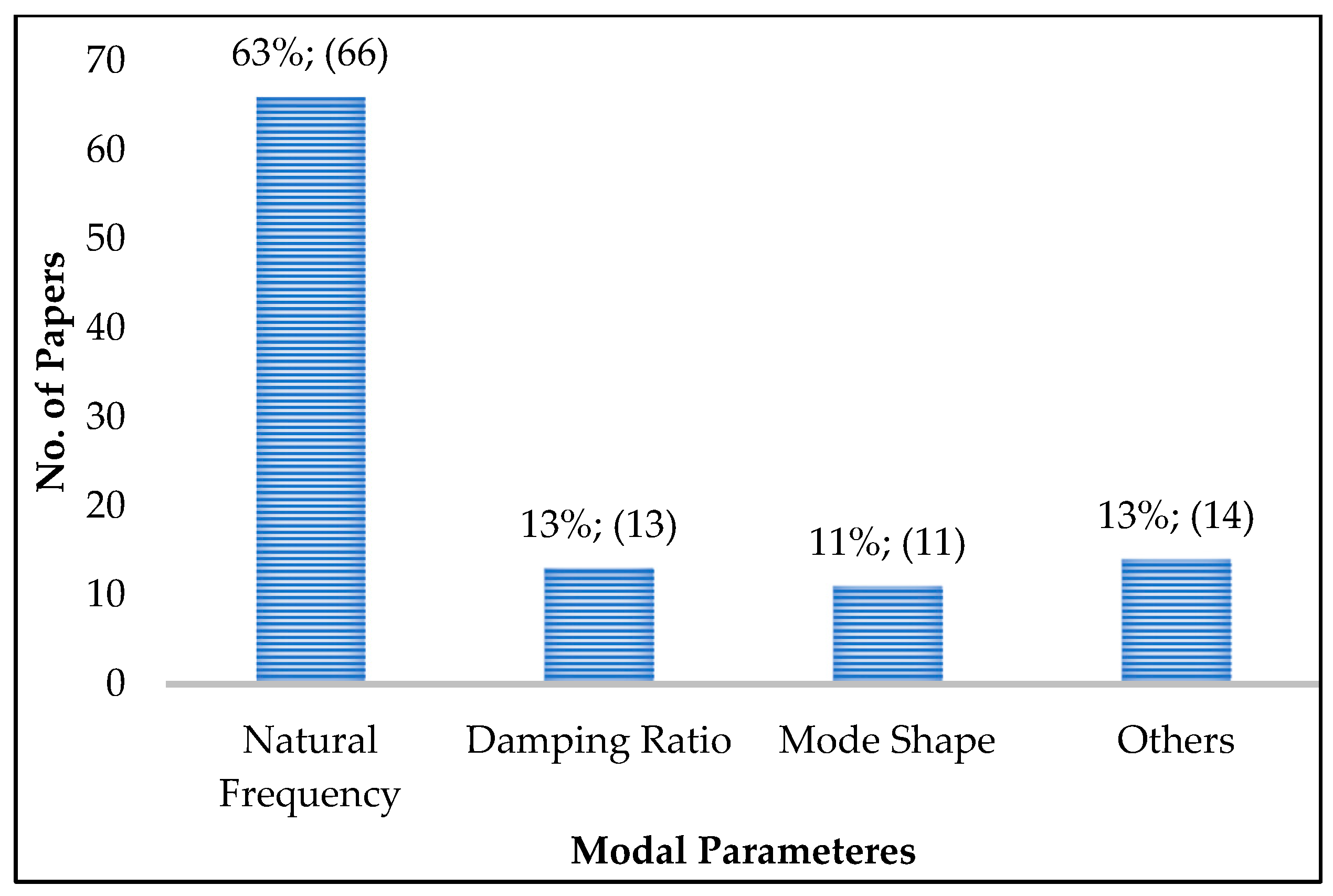
- Feature Extraction and Artificial Intelligence (AI) Interaction: Most current studies rely on frequency domain analysis for extracting modal parameters. Future research should expand to time domain and time–frequency techniques for more robust feature extraction, including capturing damping ratios and mode shapes. The integration of AI techniques, such as machine learning and deep learning, holds significant potential to enhance GBIR automation, diagnostic capabilities, and the real-time analysis of structural responses.
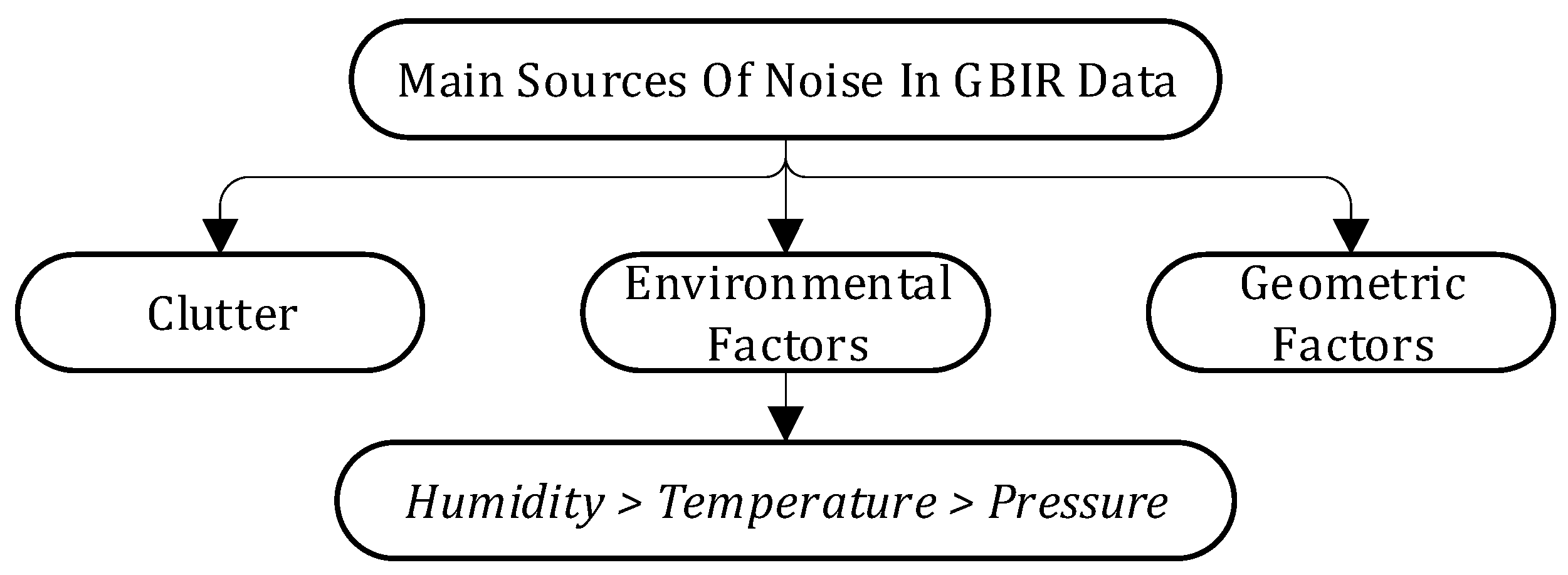
- Long-Term Monitoring: A critical research gap lies in the long-term application of GBIR for bridge monitoring. Developing robust GB-RAR systems tailored to dynamic, continuous acquisition over extended periods is essential. Key research directions include improving hardware durability, optimising power supply systems, and implementing advanced noise reduction algorithms to mitigate environmental interferences (e.g., temperature, humidity, pressure, and clutter), which are especially impactful in long-term campaigns [26,132].
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vagnoli, M.; Remenyte-Prescott, R.; Andrews, J. Railway bridge structural health monitoring and fault detection: State-of-the-art methods and future challenges. Struct. Health Monit. 2018, 17, 971–1007. [Google Scholar] [CrossRef]
- Ko, J.M.; Ni, Y.-Q. Technology developments in structural health monitoring of large-scale bridges. Eng. Struct. 2005, 27, 1715–1725. [Google Scholar] [CrossRef]
- Nasr, A.; Kjellström, E.; Björnsson, I.; Honfi, D.; Ivanov, O.L.; Johansson, J. Bridges in a changing climate: A study of the potential impacts of climate change on bridges and their possible adaptations. Struct. Infrastruct. Eng. 2020, 16, 738–749. [Google Scholar] [CrossRef]
- Thakkar, K.; Rana, A.; Goyal, H. Fragility analysis of bridge structures: A global perspective & critical review of past & present trends. Adv. Bridg. Eng. 2023, 4, 10. [Google Scholar] [CrossRef]
- Sotoudeh, S.; Jahangiri, M.; Ranjbarnia, M.; Zakeri, J.-A. Three-dimensional modeling of an old masonry bridge and assessing its current capacity. Period. Polytech. Civ. Eng. 2020, 64, 460–473. [Google Scholar] [CrossRef]
- Selvakumaran, S.; Plank, S.; Geiß, C.; Rossi, C.; Middleton, C. Remote monitoring to predict bridge scour failure using Interferometric Synthetic Aperture Radar (InSAR) stacking techniques. Int. J. Appl. Earth Obs. Geoinformation 2018, 73, 463–470. [Google Scholar] [CrossRef]
- Benedettini, F.; Gentile, C. Operational modal testing and FE model tuning of a cable-stayed bridge. Eng. Struct. 2011, 33, 2063–2073. [Google Scholar] [CrossRef]
- Piniotis, G.; Gikas, V.; Mpimis, T.; Perakis, H. Deck and Cable Dynamic Testing of a Single-span Bridge Using Radar Interferometry and Videometry Measurements. J. Appl. Geodesy 2016, 10, 87–94. [Google Scholar] [CrossRef]
- Neitzel, F.; Niemeier, W.; Weisbrich, S.; Lehmann, M. Investigation of low-cost accelerometer, terrestrial laser scanner and ground-based radar interferometer for vibration monitoring of bridges. In Proceedings of the 6th European Workshop on Structural Health Monitoring, Dresden, Germany, 3–6 July 2012. [Google Scholar]
- Sotoudeh, S.; Lantini, L.; Munisami, K.J.; Alani, A.M.; Tosti, F. An Investigation into the Acquisition Parameters for GB-SAR Assessment of Bridge Structural Components. In Proceedings of the EGU General Assembly, Vienna, Austria, 23–28 April 2023. [Google Scholar]
- Sotoudeh, S.; Benedetto, F.; Uzor, S.; Lantini, L.; Munisami, K.; Tosti, F. A study into the integration of AR-based data collection and multi-dimensional signal processing methods for GB-SAR target detection. In Proceedings of the Second International Conference on Geographic Information and Remote Sensing Technology (GIRST 2023), Qingdao, China, 21–23 July 2023. [Google Scholar]
- Sotoudeh, S.; Uzor, S.; Lantini, L.; Munisami, K.; Tosti, F. Detection of structural targets using ground-based interferometric synthetic aperture radar and augmented reality. In Proceedings of the Multimodal Sensing and Artificial Intelligence: Technologies and Applications III, Munich, Germany, 26–30 June 2023. [Google Scholar]
- Farrar, C.R.; Darling, T.W.; Migliori, A.; Baker, W.E. Microwave interferometers for non-contact vibration measurements on large structures. Mech. Syst. Signal Process. 1999, 13, 241–253. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, B.; Ding, X.; Zhang, L.; Zhang, Z.; Zhang, Z. Radar Interferometry for Urban Infrastructure Stability Monitoring: From Techniques to Applications. Sustainability 2023, 15, 14654. [Google Scholar] [CrossRef]
- Miccinesi, L.; Pieraccini, M. Bridge Monitoring by a Monostatic/Bistatic Interferometric Radar Able to Retrieve the Dynamic 3D Displacement Vector. IEEE Access 2020, 8, 210339–210346. [Google Scholar] [CrossRef]
- Michel, C.; Keller, S. Advancing Ground-Based Radar Processing for Bridge Infrastructure Monitoring. Sensors 2021, 21, 2172. [Google Scholar] [CrossRef] [PubMed]
- Pollock, A.; Berge, E. How to do a systematic review. Int. J. Stroke 2018, 13, 138–156. [Google Scholar] [CrossRef] [PubMed]
- Alani, A.M.; Tosti, F.; Bianchini Ciampoli, L.; Gagliardi, V.; Benedetto, A. An integrated investigative approach in health monitoring of masonry arch bridges using GPR and InSAR technologies. NDT E Int. 2020, 115, 102288. [Google Scholar] [CrossRef]
- Ferretti, A.; Savio, G.; Barzaghi, R.; Borghi, A.; Musazzi, S.; Novali, F.; Prati, C.; Rocca, F. Submillimeter Accuracy of InSAR Time Series: Experimental Validation. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1142–1153. [Google Scholar] [CrossRef]
- Gikas, V. Ambient vibration monitoring of slender structures by microwave interferometer remote sensing. J. Appl. Geodesy 2012, 6, 167–176. [Google Scholar] [CrossRef]
- Ataei, S.; Miri, A.; Jahangiri, M. Assessing safety of a railway stone arch bridge by experimental and numerical analyses. J. Croat. Assoc. Civ. Eng. 2017, 69, 1017–1029. [Google Scholar] [CrossRef]
- BeanAir. ULP (Ultra-Low-Power) Wireless IOT Vibration Sensor. 19 May 2024. Available online: http://www.wireless-iot.beanair.com/files/UM-RF-07-ENG-Wilow-Wifi-Sensor.pdf (accessed on 22 April 2025).
- Luzi, G.; Palamà, R.; Barros-González, B.; Riveiro-Rodríguez, B. Dual Frequency Real Aperture Radar Monitoring of a Railway Bridge. ce/papers 2023, 6, 943–948. [Google Scholar] [CrossRef]
- IDS GeoRadar. IBIS-FS Plus Datasheet. 2023. Available online: https://idsgeoradar.com/-/media/files/ids%20georadar/datasheets/ibis-fs%20plus_datasheet_0224.ashx (accessed on 22 April 2025).
- Zhao, W.; Zhang, G.; Zhang, J. Cable force estimation of a long-span cable-stayed bridge with microwave interferometric radar. Comput. Civ. Infrastruct. Eng. 2020, 35, 1419–1433. [Google Scholar] [CrossRef]
- IDS GeoRadar PoH. IBIS FS Operation Procedures for Bridges. 2019. Available online: https://idsgeoradar.com/ (accessed on 22 April 2025).
- Rödelsperger, S. Real-Time Processing of Ground Based Synthetic Aperture Radar (GB-SAR) Measurements. Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2011. [Google Scholar]
- Olaszek, P.; Świercz, A.; Boscagli, F. The Integration of Two Interferometric Radars for Measuring Dynamic Displacement of Bridges. Remote. Sens. 2021, 13, 3668. [Google Scholar] [CrossRef]
- Michel, C.; Keller, S. Determining and Investigating the Variability of Bridges’ Natural Frequencies with Ground-Based Radar. Appl. Sci. 2022, 12, 5354. [Google Scholar] [CrossRef]
- Miccinesi, L.; Beni, A.; Pieraccini, M. Multi-Monostatic Interferometric Radar for Bridge Monitoring. Electronics 2021, 10, 247. [Google Scholar] [CrossRef]
- Miccinesi, L.; Pieraccini, M.; Beni, A.; Andries, O.; Consumi, T. Multi-Monostatic Interferometric Radar with Radar Link for Bridge Monitoring. Electronics 2021, 10, 2777. [Google Scholar] [CrossRef]
- Asghari, K.; Sotoudeh, S.; Zakeri, J.-A. Numerical evaluation of approach slab influence on transition zone behavior in high-speed railway track. Transp. Geotech. 2021, 28, 100519. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, L.; Tian, Y.; Yu, S.; Zhao, W.; Cheng, Y. Vortex-induced vibration measurement of a long-span suspension bridge through noncontact sensing strategies. Comput. Civ. Infrastruct. Eng. 2021, 37, 1617–1633. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, Y.; Zhao, W.; Zhang, J. Radar-based multipoint displacement measurements of a 1200-m-long suspension bridge. ISPRS J. Photogramm. Remote. Sens. 2020, 167, 71–84. [Google Scholar] [CrossRef]
- Long, S.; Liu, W.; Ma, J.; Tong, A.; Wu, W.; Zhu, C. Health monitoring and safety evaluation of bridge dynamic load with a ground-based real aperture radar. Surv. Rev. 2022, 54, 172–186. [Google Scholar] [CrossRef]
- Lu, E.; Ren, W.; Dai, H.; Zhu, X. Investigations on electromagnetic wave scattering simulation from rough surface: Some instructions for surface roughness measurement based on machine vison. Precis. Eng. 2023, 82, 156–168. [Google Scholar] [CrossRef]
- Pieraccini, M.; Parrini, F.; Fratini, M.; Atzeni, C.; Spinelli, P.; Micheloni, M. Static and dynamic testing of bridges through microwave interferometry. NDT E Int. 2007, 40, 208–214. [Google Scholar] [CrossRef]
- Pieraccini, M.; Miccinesi, L.; Nejad, A.A.; Fard, A.N.N. Experimental Dynamic Impact Factor Assessment of Railway Bridges through a Radar Interferometer. Remote. Sens. 2019, 11, 2207. [Google Scholar] [CrossRef]
- Liu, X.; Lu, Z.; Yang, W.; Huang, M.; Tong, X. Dynamic Monitoring and Vibration Analysis of Ancient Bridges by Ground-Based Microwave Interferometry and the ESMD Method. Remote. Sens. 2018, 10, 770. [Google Scholar] [CrossRef]
- Gentile, C.; Bernardini, G. An interferometric radar for non-contact measurement of deflections on civil engineering structures: Laboratory and full-scale tests. Struct. Infrastruct. Eng. 2009, 6, 521–534. [Google Scholar] [CrossRef]
- UIC Code. 778-3R, Recommendations for the Inspection, Assessment and Maintenance of Masonry arch Bridges. UIC International Union of Railways 2011. Available online: https://shop.uic.org/en/7-structural-works/9542-recommendations-for-the-inspection-assessment-and-maintenance-of-masonry-arch-bridges-9553.html (accessed on 22 April 2025).
- Caduff, R.; Schlunegger, F.; Kos, A.; Wiesmann, A. A review of terrestrial radar interferometry for measuring surface change in the geosciences. Earth Surf. Process. Landforms 2015, 40, 208–228. [Google Scholar] [CrossRef]
- IDS GeoRadar. IBIS-FL Datasheet. 2023. Available online: https://idsgeoradar.com/products/interferometric-radar/ibis-fl (accessed on 22 April 2025).
- Shao, Z.; Zhang, X.; Li, Y.; Jiang, J. A Comparative Study on Radar Interferometry for Vibrations Monitoring on Different Types of Bridges. IEEE Access 2018, 6, 29677–29684. [Google Scholar] [CrossRef]
- Pieraccini, M.; Miccinesi, L. An Interferometric MIMO Radar for Bridge Monitoring. IEEE Geosci. Remote. Sens. Lett. 2019, 16, 1383–1387. [Google Scholar] [CrossRef]
- Miccinesi, L.; Consumi, T.; Beni, A.; Pieraccini, M. W-band MIMO GB-SAR for Bridge Testing/Monitoring. Electronics 2021, 10, 2261. [Google Scholar] [CrossRef]
- Pieraccini, M.; Miccinesi, L. RotoSAR for monitoring bridges. In Proceedings of the 2017 European Radar Conference (EURAD), Nuremberg, Germany, 11–13 October 2017; pp. 311–314. [Google Scholar]
- Tian, W.; Li, Y.; Hu, C.; Li, Y.; Wang, J.; Zeng, T. Vibration Measurement Method for Artificial Structure Based on MIMO Imaging Radar. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 748–760. [Google Scholar] [CrossRef]
- Zhao, Z.; Deng, Y.; Tian, W.; Hu, C.; Lin, Z.; Zeng, T. Dynamic Deformation Measurement of Bridge Structure Based on GB-MIMO Radar. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Gamma Remote Sensing A, Inventor. Anonymous GAMMA Portable Radar Interferometer Model: GPRI-II. User Manual (12-August-2014). Gümligen, Switzerland Patent. 2014. Available online: https://fcc.report/FCC-ID/Y3Z-GPRI-II-2/2386245.pdf (accessed on 22 April 2025).
- Zhang, B.; Ding, X.; Werner, C.; Tan, K.; Zhang, B.; Jiang, M.; Zhao, J.; Xu, Y. Dynamic displacement monitoring of long-span bridges with a microwave radar interferometer. ISPRS J. Photogramm. Remote. Sens. 2018, 138, 252–264. [Google Scholar] [CrossRef]
- Neitzel, F.; Resnik, B.; Weisbrich, S.; Friedrich, A. Vibration Monitoring of Bridges. Rep. Geod. 2011, 331–340. Available online: https://bibliotekanauki.pl/articles/225415 (accessed on 22 April 2025).
- Frýba, L. Dynamics Of Railway Bridges; Thomas Telford Publishing: London, UK, 1996. [Google Scholar]
- Weng, J.; Chen, L.; Sun, L.; Zou, Y.; Liu, Z.; Guo, H. Fully automated and non-contact force identification of bridge cables using microwave remote sensing. Measurement 2023, 209, 112508. [Google Scholar] [CrossRef]
- Talich, M.; Havrlant, J.; Soukup, L.; Plachý, T.; Polák, M.; Antoš, F.; Ryjáček, P.; Stančík, V. Accuracy Analysis and Appropriate Strategy for Determining Dynamic and Quasi-Static Bridge Structural Response Using Simultaneous Measurements with Two Real Aperture Ground-Based Radars. Remote. Sens. 2023, 15, 837. [Google Scholar] [CrossRef]
- Wang, C.; Zhou, L.; Ma, J.; Shi, A.; Li, X.; Liu, L.; Zhang, Z.; Zhang, D. GB-RAR Deformation Information Estimation of High-Speed Railway Bridge in Consideration of the Effects of Colored Noise. Appl. Sci. 2022, 12, 10504. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, T.; Liu, X.; Lu, Z.; Guo, T. Distance-restrained atmospheric parameters correction (DR-APC) model for GB-SAR transmission power attenuation compensation in bridges dynamic deflection measurement. Measurement 2022, 205, 112192. [Google Scholar] [CrossRef]
- Wang, R.; Huang, Y.; Liu, X.; Wang, H.; Jiang, M. Cyclically Shifted Extreme-point Symmetric Mode Decomposition (CS-ESMD)-based Progressive Denoising Approach for Ground-based Synthetic Aperture Radar Bridge Health Monitoring Signals. Sensors Mater. 2022, 34, 4001–4016. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, J.-Z.; Tafsirojjaman, T.; Yue, Q.-R.; Tan, C.; Che, G.-J. CFRP lamella stay-cable and its force measurement based on microwave radar. Case Stud. Constr. Mater. 2022, 16, e00824. [Google Scholar] [CrossRef]
- Filograno, M.L.; Piniotis, G.; Gikas, V.; Papavasileiou, V.; Gantes, C.J.; Kandyla, M.; Riziotis, C. Comparative Assessment and Experimental Validation of a Prototype Phase-Optical Time-Domain Reflectometer for Distributed Structural Health Monitoring. J. Sensors 2022, 2022, 6856784. [Google Scholar] [CrossRef]
- Schill, F.; Michel, C.; Firus, A. Contactless Deformation Monitoring of Bridges with Spatio-Temporal Resolution: Profile Scanning and Microwave Interferometry. Sensors 2022, 22, 9562. [Google Scholar] [CrossRef]
- Raja, B.N.K.; Miramini, S.; Duffield, C.; Chen, S.; Zhang, L. A Simplified Methodology for Condition Assessment of Bridge Bearings Using Vibration Based Structural Health Monitoring Techniques. Int. J. Struct. Stab. Dyn. 2021, 21, 2150133. [Google Scholar] [CrossRef]
- Serlenga, V.; Gallipoli, M.R.; Ditommaso, R.; Ponzo, C.F.; Tragni, N.; Perrone, A.; Stabile, T.A.; Calamita, G.; Vignola, L.; Carso, R.F.; et al. An integrated approach for structural behavior characterization of the Gravina Bridge (Matera, Southern Italy). Struct. Health Monit. 2021, 20, 3371–3391. [Google Scholar] [CrossRef]
- Erdélyi, J.; Kopáčik, A.; Kyrinovič, P. Spatial Data Analysis for Deformation Monitoring of Bridge Structures. Appl. Sci. 2020, 10, 8731. [Google Scholar] [CrossRef]
- Kuras, P.; Ortyl, Ł.; Owerko, T.; Salamak, M.; Łaziński, P. GB-SAR in the Diagnosis of Critical City Infrastructure—A Case Study of a Load Test on the Long Tram Extradosed Bridge. Remote. Sens. 2020, 12, 3361. [Google Scholar] [CrossRef]
- Katarína, L.; Milan, S.; Bianka, T. Identification of Bearings State on the Bridge Checked by Dynamic Tests. Stroj. časopis J. Mech. Eng. 2020, 70, 67–76. [Google Scholar] [CrossRef]
- Xing, C.; Wang, P.; Dong, W. Research on the bridge monitoring method of ground-based radar. Arab. J. Geosci. 2020, 13, 1267. [Google Scholar] [CrossRef]
- Huang, Q.; Wang, Y.; Luzi, G.; Crosetto, M.; Monserrat, O.; Jiang, J.; Zhao, H.; Ding, Y. Ground-Based Radar Interferometry for Monitoring the Dynamic Performance of a Multitrack Steel Truss High-Speed Railway Bridge. Remote. Sens. 2020, 12, 2594. [Google Scholar] [CrossRef]
- Cheng, Q.-H.; Chen, Q.; Wang, H.; Liu, X.-L. Bridge Damage Identification by Ground-based Synthetic Aperture Radar Using Blind Source Separation and Noise Reduction Technology. Sensors Mater. 2020, 32, 4361–4377. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, M.; Liu, Z.; Wang, H. A Morphology Filter-Assisted Extreme-Point Symmetric Mode Decomposition (MF-ESMD) Denoising Method for Bridge Dynamic Deflection Based on Ground-Based Microwave Interferometry. Shock. Vib. 2020, 2020, 8430986. [Google Scholar] [CrossRef]
- Sokol, M.; Lamperová, K. Dynamic response of bridges tested by radar interferometry. Vibroengineering Procedia 2019, 23, 138–143. [Google Scholar] [CrossRef]
- Owerko, T.; Kuras, P. Effective Processing of Radar Data for Bridge Damage Detection. Shock. Vib. 2019, 2019, 2621092. [Google Scholar] [CrossRef]
- Liu, X.; Wang, H.; Huang, M.; Yang, W. An Improved Second-Order Blind Identification (SOBI) Signal De-Noising Method for Dynamic Deflection Measurements of Bridges Using Ground-Based Synthetic Aperture Radar (GBSAR). Appl. Sci. 2019, 9, 3561. [Google Scholar] [CrossRef]
- Zhou, L.; Guo, J.; Hu, J.; Ma, J.; Wei, F.; Xue, X. Subsidence analysis of ELH Bridge through ground-based interferometric radar during the crossing of a subway shield tunnel underneath the bridge. Int. J. Remote. Sens. 2018, 39, 1911–1928. [Google Scholar] [CrossRef]
- Granello, G.; Andisheh, K.; Palermo, A.; Waldin, J. Microwave Radar Interferometry as a Cost-Efficient Method of Monitoring the Structural Health of Bridges in New Zealand. Struct. Eng. Int. 2018, 28, 518–525. [Google Scholar] [CrossRef]
- Luzi, G.; Crosetto, M.; Fernández, E. Radar Interferometry for Monitoring the Vibration Characteristics of Buildings and Civil Structures: Recent Case Studies in Spain. Sensors 2017, 17, 669. [Google Scholar] [CrossRef] [PubMed]
- Kafle, B.; Zhang, L.; Mendis, P.; Herath, N.; Maizuar, M.; Duffield, C.; Thompson, R.G. Monitoring the dynamic behaviour of the merlynston creek bridge using interferometric radar sensors and finite element modelling. Int. J. Appl. Mech. 2017, 9, 1750003. [Google Scholar] [CrossRef]
- Maizuar, M.; Zhang, L.; Miramini, S.; Mendis, P.; Thompson, R.G. Detecting structural damage to bridge girders using radar interferometry and computational modelling. Struct. Control. Health Monit. 2017, 24, e1985. [Google Scholar] [CrossRef]
- Beben, D. Application of Interferometry Method for Dynamic Continuous Testing of Bridges. Period. Polytech. Civ. Eng. 2016, 60, 387–395. [Google Scholar] [CrossRef]
- Ferrer, B.; Mas, D.; García-Santos, J.I.; Luzi, G. Parametric Study of the Errors Obtained from the Measurement of the Oscillating Movement of a Bridge Using Image Processing. J. Nondestruct. Evaluation 2016, 35, 53. [Google Scholar] [CrossRef]
- Liu, X.; Tong, X.; Ding, K.; Zhao, X.; Zhu, L.; Zhang, X. Measurement of Long-Term Periodic and Dynamic Deflection of the Long-Span Railway Bridge Using Microwave Interferometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2015, 8, 4531–4538. [Google Scholar] [CrossRef]
- Gentile, C.; Cabboi, A. Vibration-based structural health monitoring of stay cables by microwave remote sensing. Smart Struct. Syst. 2014, 16, 263–280. [Google Scholar] [CrossRef]
- Alani, A.M.; Aboutalebi, M.; Kilic, G. Integrated health assessment strategy using NDT for reinforced concrete bridges. NDT E Int. 2014, 61, 80–94. [Google Scholar] [CrossRef]
- Alani, A.M.; Aboutalebi, M.; Kilic, G. Use of non-contact sensors (IBIS-S) and finite element methods in the assessment of bridge deck structures. Struct. Concr. 2014, 15, 240–247. [Google Scholar] [CrossRef]
- Owerko, T. Variations of Frequency Responses of a Cable-Stayed Bridge and Calculation of the Damping Coefficient of Selected Vibration Modes Based on the Data Recorded with Radar Systems. Geomatics Environ. Eng. 2013, 7, 79. [Google Scholar] [CrossRef]
- Kohut, P.; Holak, K.; Uhl, T.; Ortyl, Ł.; Owerko, T.; Kuras, P.; Kocierz, R. Monitoring of a civil structure’s state based on noncontact meas-urements. Struct. Health Monit. 2013, 12, 411–429. [Google Scholar] [CrossRef]
- Stabile, T.A.; Perrone, A.; Gallipoli, M.R.; Ditommaso, R.; Ponzo, F.C. Dynamic Survey of the Musmeci Bridge by Joint Application of Ground-Based Microwave Radar Interferometry and Ambient Noise Standard Spectral Ratio Techniques. IEEE Geosci. Remote. Sens. Lett. 2013, 10, 870–874. [Google Scholar] [CrossRef]
- Stabile, T.A.; Giocoli, A.; Perrone, A.; Palombo, A.; Pascucci, S.; Pignatti, S. A new joint application of non-invasive remote sensing techniques for structural health monitoring. J. Geophys. Eng. 2012, 9, S53–S63. [Google Scholar] [CrossRef]
- Beben, D. Application of the interferometric radar for dynamic tests of corrugated steel plate (CSP) culvert. NDT E Int. 2011, 44, 405–412. [Google Scholar] [CrossRef]
- Gentile, C. Application of Microwave Remote Sensing to Dynamic Testing of Stay-Cables. Remote. Sens. 2009, 2, 36–51. [Google Scholar] [CrossRef]
- Gentile, C. Deflection measurement on vibrating stay cables by non-contact microwave interferometer. NDT E Int. 2010, 43, 231–240. [Google Scholar] [CrossRef]
- Gentile, C.; Bernardini, G. Radar-based measurement of deflections on bridges and large structures. Eur. J. Envi-Ronmental Civ. Eng. 2010, 14, 495. [Google Scholar] [CrossRef]
- De Pasquale, G.; Bernardini, G.; Ricci, P.; Gentile, C. Ambient Vibration Testing of Bridges by Non-Contact Microwave Interfer-ometer. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008. [Google Scholar]
- Dei, D.; Pieraccini, M.; Fratini, M.; Atzeni, C.; Bartoli, G. Detection of vertical bending and torsional movements of a bridge using a coherent radar. NDT E Int. 2009, 42, 741–747. [Google Scholar] [CrossRef]
- Gentile, C.; Bernardini, G. Output-only modal identification of a reinforced concrete bridge from radar-based measurements. NDT E Int. 2008, 41, 544–553. [Google Scholar] [CrossRef]
- Maizuar, M.; Lumantarna, E.; Sofi, M.; Oktavianus, Y.; Zhang, L.; Duffield, C.; Mendis, P.; Widyastuti, H. Dynamic Behavior of Indonesian Bridges using Interferometric Radar Technology. Electron. J. Struct. Eng. 2018, 18, 23–29. [Google Scholar] [CrossRef]
- Owerko, T.; Ortyl, Ł.; Kocierz, R.; Kuras, P.; Salamak, M. Investigation of displacements of road bridges under test loads using radar interferometry—Case study. In Proceedings of the Sixth International IABMAS Conference 2012, Stresa, Italy, 8–12 July 2012; pp. 181–188. [Google Scholar]
- Arnold, M.; Hoyer, M.; Keller, S. Convolutional neural networks for detecting bridge crossing events with ground-based interferometric radar data. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2021, 1, 31–38. [Google Scholar] [CrossRef]
- Kuras, P.; Owerko, T.; Ortyl, Ł.; Kocierz, R.; Sukta, O.; Pradelok, S. Advantages of radar interferometry for assessment of dynamic deformation of bridge. In Bridge Maintenance, Safety, Management, Resilience and Sustainability; CRC Press: Boca Raton, FL, USA, 2014; pp. 885–891. [Google Scholar]
- Plachy, T.; Polák, M.; Ryjáček, P.; Talich, M.; Havrlant, J.; Antoš, F.; Litoš, J.; Macho, M.; Soukup, L. Experimental dynamic analysis of the arch road bridge. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Prague, Czech Republic, 6–10 September 2021. [Google Scholar]
- Yu, C.-P.; Cheng, C.-C. Dynamic analysis of a cable-stayed bridge using continuous formulation of 1-D linear member. Earthquakes Struct. 2012, 3, 271–295. [Google Scholar] [CrossRef]
- Afzal, M.F.U.D.; Javed, A. Non-contact measurement of vibration modes of large cable-stayed bridge under ambient conditions: A convenient way of condition monitoring of bridges. J. Civ. Struct. Health Monit. 2024, 14, 339–353. [Google Scholar] [CrossRef]
- Chen, S.; Chen, D.; Sannasiraj, R.D.A.; Zhang, L. Engineering reliability-based condition assessment for stay cables using non-destructive interferometric radar. Int. J. Struct. Stab. Dyn. 2023, 24, 2450154. [Google Scholar] [CrossRef]
- Zhao, S.; Liu, X.; Wang, R. Extreme-point Symmetric Mode Decomposition-based Energy Integral Model for Bridge Abnormality Detection Using Ground-based Synthetic Aperture Radar. Sensors Mater. 2023, 35, 3337. [Google Scholar] [CrossRef]
- Čáp, M.; Polák, M.; Plachý, T.; Talich, M.; Havrlant, J.; Soukup, L.; Antoš, F. The footbridge Jesípek–application of radar interferometry for dynamic response evaluation. Acta Polytech. CTU Proc. 2023, 40, 8–14. [Google Scholar] [CrossRef]
- Zou, L.; Feng, W.; Masci, O.; Nico, G.; Alani, A.M.; Sato, M. Bridge Monitoring Strategies for Sustainable Development with Microwave Radar Interferometry. Sustainability 2024, 16, 2607. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, G.; Zang, G.; Zhang, G.; Sang, W.; Zhang, S.; Li, W. Monitoring Bridge Dynamic Deformation Law Based on Digital Photography and Ground-Based RAR Technology. Appl. Sci. 2023, 13, 10838. [Google Scholar] [CrossRef]
- Liu, X.; Wang, P.; Lu, Z.; Gao, K.; Wang, H.; Jiao, C.; Zhang, X. Damage detection and analysis of urban bridges using terrestrial laser scanning (TLS), ground-based microwave interfer-ometry, and permanent scatterer interferometry synthetic aperture radar (PS-InSAR). Remote. Sens. 2019, 11, 580. [Google Scholar] [CrossRef]
- Placidi, S.; Meta, A.; Testa, L.; Rodelsperger, S. Monitoring structures with FastGBSAR. In Proceedings of the 2015 IEEE Radar Conference, Johannesburg, South Africa, 27–30 October 2015; pp. 435–439. [Google Scholar]
- Michel, C.; Keller, S. Assessing Important Uncertainty Influences of Ground-Based Radar for Bridge Monitoring. IEEE Geosci. Remote. Sens. Lett. 2023, 21, 3501005. [Google Scholar] [CrossRef]
- Zhang, G.; Cheng, Y.; Xia, Q.; Zhang, J. Curvature envelope area based rapid identification method of bridge distributional element stiffness using microwave interference radar. Mech. Syst. Signal Process. 2023, 197, 110390. [Google Scholar] [CrossRef]
- Pieraccini, M.; Dei, D.; Mecatti, D. Interferometric radar for testing large structures with a built-in seismic accelerometer. Sensors Actuators A Phys. 2013, 204, 25–30. [Google Scholar] [CrossRef]
- Grazzini, G.; Pieraccini, M.; Dei, D.; Atzeni, C. Simple microwave sensor for remote detection of structural vibration. Electron. Lett. 2009, 45, 567–569. [Google Scholar] [CrossRef]
- Pieraccini, M.; Fratini, M.; Parrini, F.; Atzeni, C.; Bartoli, G. Interferometric radar vs. accelerometer for dynamic monitoring of large structures: An experimental comparison. NDT E Int. 2008, 41, 258–264. [Google Scholar] [CrossRef]
- Pieraccini, M.; Fratini, M.; Parrini, F.; Atzeni, C. Dynamic Monitoring of Bridges Using a High-Speed Coherent Radar. IEEE Trans. Geosci. Remote. Sens. 2006, 44, 3284–3288. [Google Scholar] [CrossRef]
- Wang, J.; Wang, X.; Fan, C.; Li, Y.; Huang, X. Bridge Dynamic Cable-Tension Estimation with Interferometric Radar and APES-Based Time-Frequency Analysis. Electronics 2021, 10, 501. [Google Scholar] [CrossRef]
- Li, Y.; Shao, Z.; Zhang, X.; Jiang, J. Mm-wave Radar Based Micro-Deformation Monitoring for Highway and Freight Railway Bridges. Appl. Comput. Electromagn. Soc. J. 2019, 34, 457–462. [Google Scholar]
- Shao, Z.; Zhang, X.; Li, Y. Analysis and Validation of Super-Resolution Micro-Deformation Monitoring Radar. Prog. Electromagn. Res. M 2017, 62, 41–50. [Google Scholar] [CrossRef]
- Ma, Z.; Choi, J.; Yang, L.; Sohn, H. Structural displacement estimation using accelerometer and FMCW millimeter wave radar. Mech. Syst. Signal Process. 2023, 182, 109582. [Google Scholar] [CrossRef]
- Ma, Z.; Choi, J.; Sohn, H. Continuous bridge displacement estimation using millimeter-wave radar, strain gauge and accelerometer. Mech. Syst. Signal Process. 2023, 197, 110408. [Google Scholar] [CrossRef]
- Dei, D.; Mecatti, D.; Pieraccini, M. Static Testing of a Bridge Using an Interferometric Radar: The Case Study of “Ponte degli Alpini,” Belluno, Italy. Sci. World J. 2013, 2013, 504958. [Google Scholar] [CrossRef]
- Pieraccini, M.; Tarchi, D.; Rudolf, H.; Leva, D.; Luzi, G.; Bartoli, G.; Atzeni, C. Structural static testing by interferometric synthetic radar. NDT E Int. 2000, 33, 565–570. [Google Scholar] [CrossRef]
- Pieraccini, M.; Tarchi, D.; Rudolf, H.; Leva, D.; Luzi, G.; Atzeni, C. Interferometric radar for remote monitoring of building deformations. Electron. Lett. 2000, 36, 569–570. [Google Scholar] [CrossRef]
- Zhang, G.; Zhao, W.; Zhang, J. Bridge distributed stiffness identification of continuous beam bridge based on microwave interferometric radar technology and rotation influence line. Measurement 2023, 220, 113353. [Google Scholar] [CrossRef]
- Pagnini, L.; Miccinesi, L.; Beni, A.; Pieraccini, M. Transversal Displacement Detection of an Arched Bridge with a Multimonostatic Multiple-Input Multiple-Output Radar. Sensors 2024, 24, 1839. [Google Scholar] [CrossRef]
- Zou, L.; Nico, G.; Alani, A.M.; Sato, M. Strategy for vertical deformation of railway bridge monitoring using polarimetric ground-based real aperture radar system. Struct. Health Monit. 2024, 23, 3719–3730. [Google Scholar] [CrossRef]
- Pramudita, A.A.; Lin, D.; Dhiyani, A.A.; Ryanu, H.H.; Adiprabowo, T.; Yudha, E.A. FMCW Radar for Non Contact Bridge Structure Displacement Estimation. IEEE Trans. Instrum. Meas. 2023, 72, 8504914. [Google Scholar] [CrossRef]
- Zhu, Y.; Xu, B.; Li, Z.; Li, J.; Hou, J.; Mao, W. Joint Estimation of Ground Displacement and Atmospheric Model Parameters in Ground-Based Radar. Remote. Sens. 2023, 15, 1765. [Google Scholar] [CrossRef]
- Zhu, Y.; Xu, B.; Li, Z.; Hou, J.; Wang, Q. Monitoring Bridge Vibrations Based on GBSAR and Validation by High-Rate GPS Measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 5572–5580. [Google Scholar] [CrossRef]
- Zhang, C.; Mousavi, A.A.; Masri, S.F.; Gholipour, G.; Yan, K.; Li, X. Vibration feature extraction using signal processing techniques for structural health monitoring: A review. Mech. Syst. Signal Process. 2022, 177, 109175. [Google Scholar] [CrossRef]
- Smyth, A.; Wu, M. Multi-rate Kalman filtering for the data fusion of displacement and acceleration response measurements in dynamic system monitoring. Mech. Syst. Signal Process. 2007, 21, 706–723. [Google Scholar] [CrossRef]
- Monserrat, O.; Crosetto, M.; Luzi, G. A review of ground-based SAR interferometry for deformation measurement. ISPRS J. Photogramm. Remote Sens. 2014, 93, 40–48. [Google Scholar] [CrossRef]
- Arnold, M.; Keller, S. Detection and classification of bridge crossing events with ground-based interferometric radar data and machine learning approaches. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2020, 1, 109–116. [Google Scholar] [CrossRef]
- Ri, S.; Tsuda, H.; Chang, K.; Hsu, S.; Lo, F.; Lee, T. Dynamic Deformation Measurement by the Sampling Moiré Method from Video Recording and its Application to Bridge Engineering. Exp. Tech. 2020, 44, 313–327. [Google Scholar] [CrossRef]




| “real aperture radar monitoring” OR “aperture radar interferometer” OR “radar-based monitoring” OR “radar-based measurement” OR “Radar remote sensing” OR “radar interferometry” OR “radar interferometric” OR “Radar -based displacement measurement” OR “no-Doa” OR “Multiple input multiple output” OR “MIMO” OR “MIMO radar” OR “microwave” OR “Microwave remote sensing” OR “microwave radar interferometry” OR “microwave interferometry” OR “microwave interferometry radar” OR “interferometry” OR “interferometric” OR “Interferometric synthetic radar” OR “interferometric real aperture radar” OR “interferometric radar” OR “interferometric radar sensor” OR “interferometer real aperture radar” OR “Ground-based SAR” OR “Ground-based synthetic aperture radar” OR “ground-based radar” OR “Ground-based radar interferometry” OR “ground-based radar interferometer” OR “ground-based microwave radar interferometry” OR “ground-based microwave interferometry” OR “ground-based microwave interferometer” OR “ground-based interferometry radar” OR “ground-based interferometric radar” OR “Ground based synthetic aperture radar” OR “Ground based interferometric SAR” OR “GB-SAR” OR “GBSAR” OR “GB-SAR interferometry” OR “GBRI” OR “FastGBSAR” OR “electromagnetic monitoring” OR “IBIS” OR “GB-InRAR” OR “GBMI” | Bridge | “monitoring” OR “health monitoring” OR “structural health monitoring” OR “structural monitoring” OR “structural health” OR “data collection” OR “displacement measurement” OR “vibration” OR “SHM” |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sotoudeh, S.; Lantini, L.; Uzor, S.; Tosti, F. A Systematic Review into the Application of Ground-Based Interferometric Radar Systems for Bridge Monitoring. Remote Sens. 2025, 17, 1541. https://doi.org/10.3390/rs17091541
Sotoudeh S, Lantini L, Uzor S, Tosti F. A Systematic Review into the Application of Ground-Based Interferometric Radar Systems for Bridge Monitoring. Remote Sensing. 2025; 17(9):1541. https://doi.org/10.3390/rs17091541
Chicago/Turabian StyleSotoudeh, Saeed, Livia Lantini, Stephen Uzor, and Fabio Tosti. 2025. "A Systematic Review into the Application of Ground-Based Interferometric Radar Systems for Bridge Monitoring" Remote Sensing 17, no. 9: 1541. https://doi.org/10.3390/rs17091541
APA StyleSotoudeh, S., Lantini, L., Uzor, S., & Tosti, F. (2025). A Systematic Review into the Application of Ground-Based Interferometric Radar Systems for Bridge Monitoring. Remote Sensing, 17(9), 1541. https://doi.org/10.3390/rs17091541