Habitat Classification of Temperate Marine Macroalgal Communities Using Bathymetric LiDAR


Abstract
:1. Introduction
2. Methods
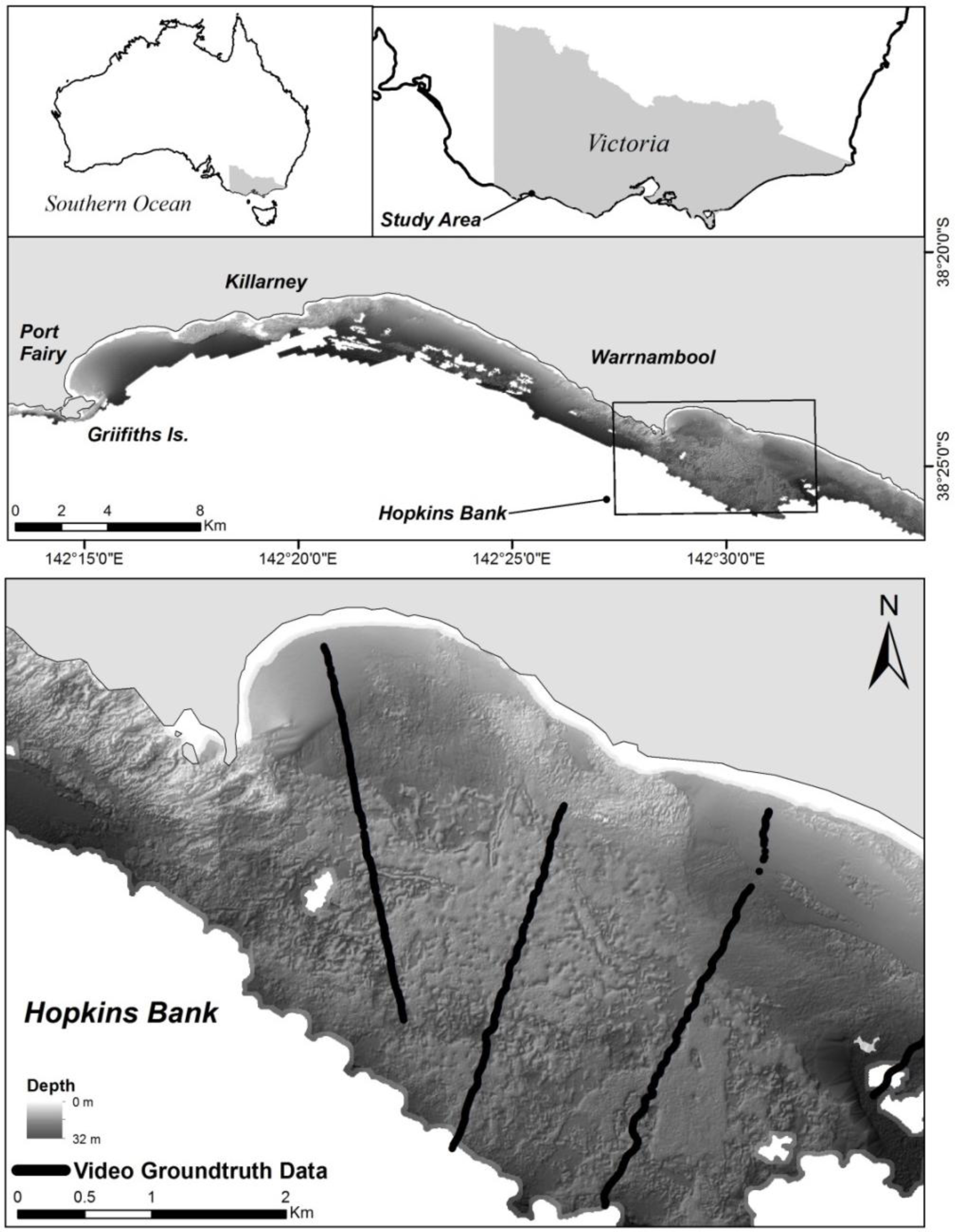
2.1. Study Area
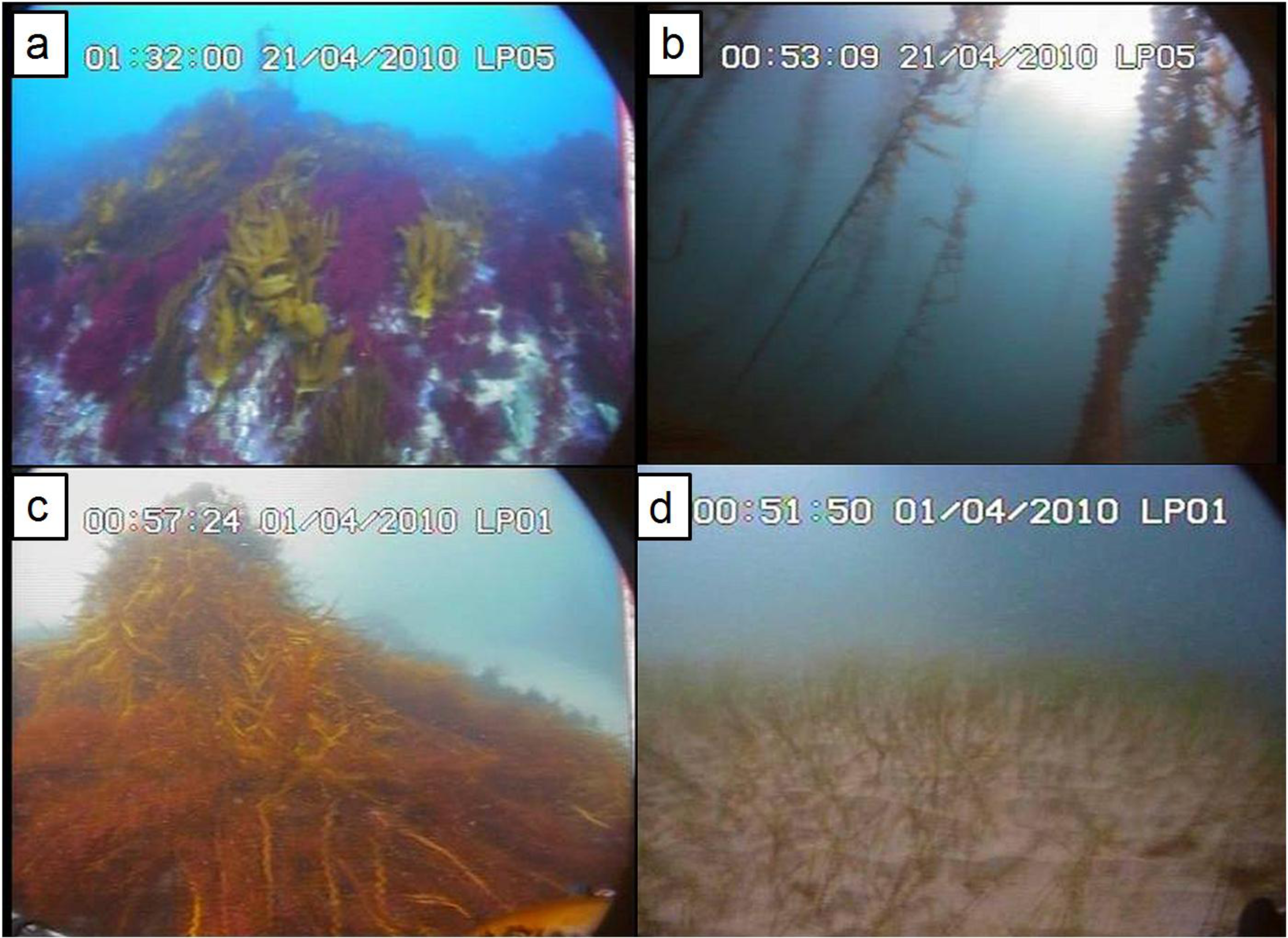
2.2. Video Data Acquisition
2.3. Video Data Processing
2.4. LiDAR Acquisition
2.5. LiDAR Processing
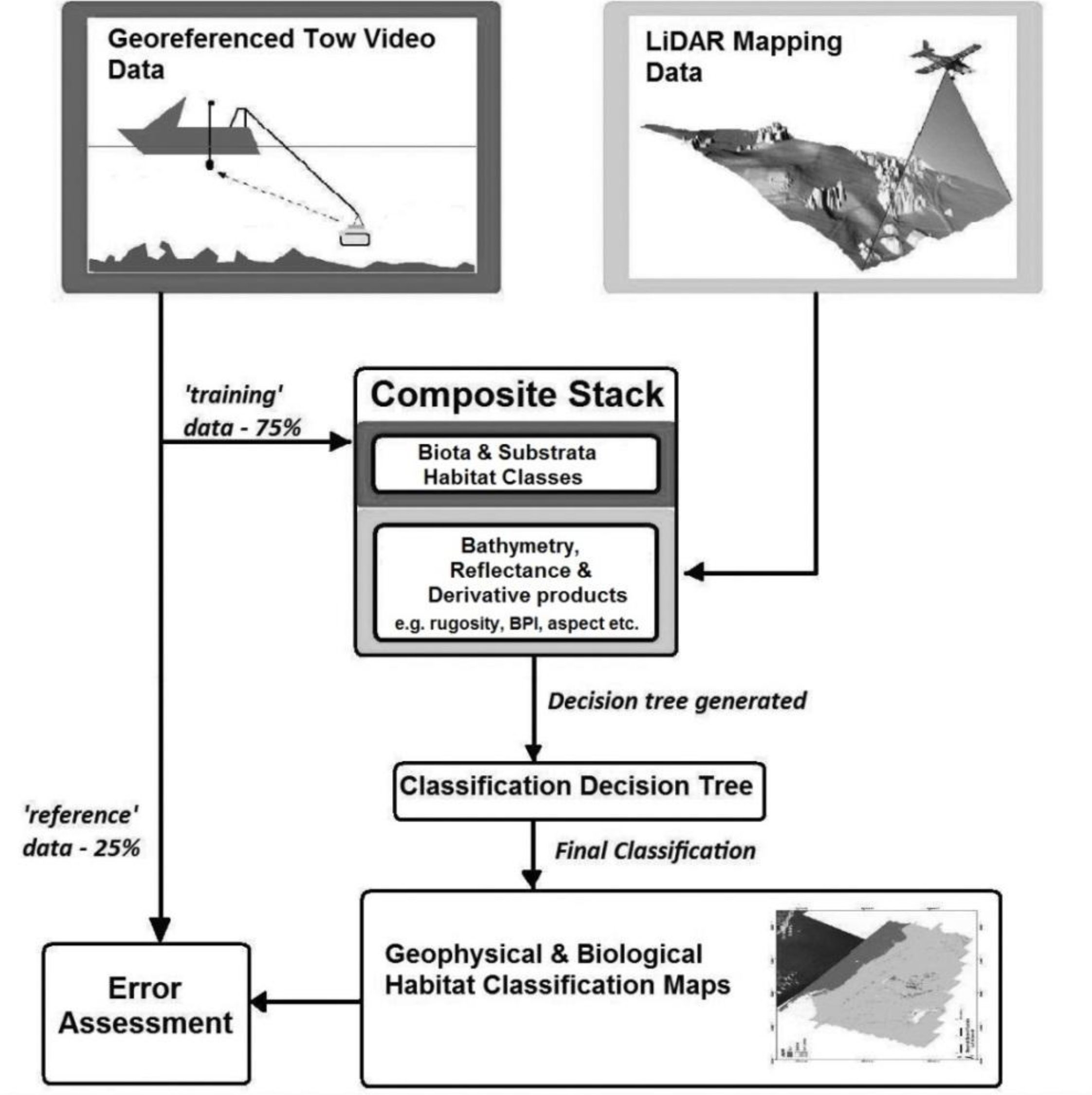
2.6. Image Classification
2.7. Image Evaluation
3. Results
3.1. Substrata Classification
3.2. Biological Classification
3.3. Canopy Structure Classification
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jackson, J.B.C. Ecological extinction and evolution in the brave new ocean. Proc. Natl. Acad. Sci. USA 2008, 105, 11458–11465. [Google Scholar]
- Crowder, L.; Norse, E. Essential ecological insights for marine ecosystem-based management and marine spatial planning. Mar. Policy 2008, 32, 772–778. [Google Scholar]
- Diaz, R.J.; Solan, M.; Valente, R.M. A review of approaches for classifying benthic habitats and evaluating habitat quality. J. Environ. Manag 2004, 73, 165–181. [Google Scholar]
- Cogan, C.B.; Todd, B.J.; Lawton, P.; Noji, T.T. The role of marine habitat mapping in ecosystem-based management. Ices J. Mar.Sci 2009, 66, 2033–2042. [Google Scholar]
- Chust, G.; Grande, M.; Galparsoro, I.; Uriarte, A.; Borja, Á. Capabilities of the bathymetric hawk eye lidar for coastal habitat mapping: A case study within a basque estuary. Estuar. Coast. Shelf Sci 2010, 89, 200–213. [Google Scholar]
- Iampietro, P.J.; Kvitek, R.G.; Morris, E. Recent advances in automated genus-specific marine habitat mapping enabled by high-resolution multibeam bathymetry. Mar. Technol. Soc. J 2005, 39, 83–93. [Google Scholar]
- Cutter, G.R.; Rzhanov, Y.; Mayer, L.A. Automated segmentation of seafloor bathymetry from multibeam echosounder data using local fourier histogram texture features. J. Exp. Mar. Biol. Ecol 2003, 285, 355–370. [Google Scholar]
- Ierodiaconou, D.; Monk, J.; Rattray, A.; Laurenson, L.; Versace, V.L. Comparison of automated classification techniques for predicting benthic biological communities using hydroacoustics and video observations. Cont. Shelf Res 2011, 31, 28–38. [Google Scholar]
- Rattray, A.; Ierodiaconou, D.; Laurenson, L.; Burq, S.; Reston, M. Hydro-acoustic remote sensing of benthic biological communities on the shallow South East Australian continental shelf. Estuar. Coast. Shelf Sci 2009, 84, 237–245. [Google Scholar]
- Holmes, K.W.; van Niel, K.P.; Radford, B.; Kendrick, G.A.; Grove, S.L. Modelling distribution of marine benthos from hydroacoustics and underwater video. Cont. Shelf Res 2008, 28, 1800–1810. [Google Scholar]
- Mather, P.M. Computer Processing of Remotely-Sensed Images—An Introduction, 3rd ed; Wiley, J., Chichester, S., Eds.; Macsource Press: Oxford, UK, 2004. [Google Scholar]
- Clarke, J.E.H.; Mayer, L.A.; Wells, D.E. Shallow-water imaging multibeam sonars: A new tool for investigating seafloor processes in the coastal zone and on the continental shelf. Mar. Geophys. Res 1996, 18, 607–629. [Google Scholar]
- Ryan, D.A.; Brooke, B.P.; Collins, L.B.; Kendrick, G.A.; Baxter, K.J.; Bickers, A.N.; Siwabessy, P.J.W.; Pattiaratchi, C.B. The influence of geomorphology and sedimentary processes on shallow-water benthic habitat distribution: Esperance Bay, Western Australia. Estuar. Coast. Shelf Sci 2007, 72, 379–386. [Google Scholar]
- Costa, B.M.; Battista, T.A.; Pittman, S.J. Comparative evaluation of airborne lidar and ship-based multibeam sonar bathymetry and intensity for mapping coral reef ecosystems. Remote Sens. Environ 2009, 113, 1082–1100. [Google Scholar]
- Irish, J.L.; Lillycrop, W.J. Scanning laser mapping of the coastal zone: The shoals system. ISPRS J. Photogramm. Remote Sens 1999, 54, 123–129. [Google Scholar]
- Vierling, K.T.; Vierling, L.A.; Gould, W.A.; Martinuzzi, S.; Clawges, R.M. Lidar: Shedding new light on habitat characterization and modeling. Front. Ecol. Environ 2008, 6, 90–98. [Google Scholar]
- Kuffner, I.B.; Brock, J.C.; Grober-Dunsmore, R.; Bonito, V.E.; Hickey, T.D.; Wright, C.W. Relationships between reef fish communities and remotely sensed rugosity measurements in Biscayne National Park, Florida, USA. Environ. Biol. Fishes 2007, 78, 71–82. [Google Scholar]
- Wedding, L.M.; Friedlander, A.M.; McGranaghan, M.; Yost, R.S.; Monaco, M.E. Using bathymetric lidar to define nearshore benthic habitat complexity: Implications for management of reef fish assemblages in Hawaii. Remote Sens. Environ 2008, 112, 4159–4165. [Google Scholar]
- Wang, C.K.; Philpot, W.D. Using airborne bathymetric lidar to detect bottom type variation in shallow waters. Remote Sens. Environ 2007, 106, 123–135. [Google Scholar]
- Pittman, S.J.; Costa, B.M.; Battista, T.A. Using lidar bathymetry and boosted regression trees to predict the diversity and abundance of fish and corals. J. Coast. Res 2009, 25, 27–38. [Google Scholar]
- Walker, B.K.; Riegl, B.; Dodge, R.E. Mapping coral reef habitats in Southeast Florida using a combined technique approach. J. Coast. Res 2008, 24, 1138–1150. [Google Scholar]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. Lidar remote sensing of forest structure. Prog. Phys. Geogr 2003, 27, 88–106. [Google Scholar]
- Hill, R.A.; Thomson, A.G. Mapping woodland species composition and structure using airborne spectral and lidar data. Int. J. Remote Sens 2005, 26, 3763–3779. [Google Scholar]
- Toohey, B.D. The relationship between physical variables on topographically simple and complex reefs and algal assemblage structure beneath an ecklonia radiata canopy. Estuar. Coast. Shelf Sci 2007, 71, 232–240. [Google Scholar]
- Jones, C.G.; Lawton, J.H.; Mosche, S. Organisms as ecosystem engineers. Oikos 1994, 69, 372–386. [Google Scholar]
- Short, A.D. Sediment transport around australia-sources, mechanisms, rates, and barrier form. J. Coast. Res 2010, 26, 395–402. [Google Scholar]
- James, N.P.; Bone, Y.; von Der Borch, C.C.; Gostin, V.A. Modern carbonate and terrigenous clastic sediments on a cool water, high energy, mid-latitude shelf: Lacepede, southern Australia. Sedimentology 1992, 39, 877–903. [Google Scholar]
- Monk, J.; Ierodiaconou, D.; Bellgrove, A.; Laurenson, L. Using community-based monitoring with gis to create habitat maps for a marine protected area in australia. J. Mar. Biol. Assoc. UK 2008, 88, 865–871. [Google Scholar]
- Rattray, A.; Ierodiaconou, D.; Monk, J.; Laurenson, L.; Kennedy, P. Quantification of spatial and thematic uncertainty in the application of underwater video for benthic habitat mapping. Mar. Geod 2014. In press. [Google Scholar]
- Ierodiaconou, D.; Burq, S.; Reston, M.; Laurenson, L. Marine benthic habitat mapping using multibeam data, georeferenced video and image classification techniques in Victoria, Australia. Spat. Sci 2007, 52, 93–104. [Google Scholar]
- Wernberg, T.; Goldberg, N. Short-term temporal dynamics of algal species in a subtidal kelp bed in relation to changes in environmental conditions and canopy biomass. Estuar. Coast. Shelf Sci 2008, 76, 265–272. [Google Scholar]
- McArthur, M.A.; Brooke, B.P.; Przeslawski, R.; Ryan, D.A.; Lucieer, V.L.; Nichol, S.; McCallum, A.W.; Mellin, C.; Cresswell, I.D.; Radke, L.C. On the use of abiotic surrogates to describe marine benthic biodiversity. Estuar. Coast. Shelf Sci 2010, 88, 21–32. [Google Scholar]
- Collin, A.; Long, B.; Archambault, P. Merging land-marine realms: Spatial patterns of seamless coastal habitats using a multispectral lidar. Remote Sens. Environ 2012, 123, 390–399. [Google Scholar]
- Jenness, J.S. Calculating landscape surface area from digital elevation models. Wildl. Soc. Bull 2004, 32, 829–839. [Google Scholar]
- Lundblad, E.R.; Wright, D.J.; Miller, J.; Larkin, E.M.; Rinehart, R.; Naar, D.F.; Donahue, B.T.; Anderson, S.M.; Battista, T. A benthic terrain classification scheme for american samoa. Mar. Geod 2006, 29, 89–111. [Google Scholar]
- Schmidt, J.; Evans, I.S.; Brinkmann, J. Comparison of polynomial models for land surface curvature calculation. Int. J. Geogr.Inf. Sci 2003, 17, 797–814. [Google Scholar]
- Delaney, J. Geographical Information Systems: An Introduction; Oxford University Press: Melbourne, Australia, 1999. [Google Scholar]
- Wilson, M.F.J.; O’Connell, B.; Brown, C.; Guinan, J.C.; Grehan, A.J. Multiscale terrain analysis of multibeam bathymetry data for habitat mapping on the continental slope. Mar. Geod 2007, 30, 3–35. [Google Scholar]
- Daily, M. Hue-saturation-intensity split-spectrum processing of seasat radar imagery. Photogramm. Eng. Remote Sens 1983, 49, 349–355. [Google Scholar]
- Loh, W.Y.; Shih, Y.S. Split selection methods for classification trees. Statistica Sin 1997, 7. [Google Scholar]
- Pal, M.; Mather, P.M. An Assessment of the effectiveness of decision tree methods for land Cover classification. Remote Sens. Environ 2003, 86, 554–565. [Google Scholar]
- Edwards, L. Catami Classification Scheme for Scoring Marine Biota and Substrata in Underwater Imagery. In CATAMI Classification Scheme for Scoring Marine Biota and Substrata in Underwater Imagery; iVEC: Kensington, Australia, 2013; pp. 1–17. [Google Scholar]
- Franklin, J. Mapping Species Distributions-Spatial Inference and Prediction; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Date-Principles and Practices, 2nd ed; CRC Press: New York, NY, USA, 2009. [Google Scholar]
- Jensen, J.R. Introductory Digital Image Processing, 3rd ed.; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Card, D.H. Using known map category marginal frequencies to improve estimates of thematic map accuracy. Photogramm. Eng. Remote Sens 1982, 48, 431–439. [Google Scholar]
- Ma, Z.K.; Redmond, R.L. Tau-coefficients for accuracy assessment of classification of remote-sensing data. Photogramm. Eng. Remote Sens 1995, 61, 435–439. [Google Scholar]
- Wang, C.K.; Philpot, W.; Kim, M.; Lei, H.M. A monte carlo study of the seagrass-induced depth bias in bathymetric lidar. Opt. Express 2011, 19, 7230–7243. [Google Scholar]
- Brown, C.J.; Smith, S.J.; Lawton, P.; Anderson, J.T. Benthic habitat mapping: A review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques. Estuar.Coast. Shelf Sci 2011, 92, 502–520. [Google Scholar]
- Bruce, E.M.; Eliot, I.G.; Milton, D.J. Method for assessing the thematic and positional accuracy of seagrass mapping. Mar. Geod 1997, 20, 175–193. [Google Scholar]
- White, W.H.; Harborne, A.R.; Sotheran, I.S.; Walton, R.; Foster-Smith, R.L. Using an acoustic ground discrimination system to map coral reef benthic classes. Int. J. Remote Sens 2003, 24, 2641–2660. [Google Scholar]
- Wolter, P.T.; Johnston, C.A.; Niemi, G.J. Mapping submergent aquatic vegetation in the us great lakes using quickbird satellite data. Int. J. Remote Sens 2005, 26, 5255–5274. [Google Scholar]
- Kenny, A.J.; Cato, I.; Desprez, M.; Fader, G.; Schuttenhelm, R.T.E.; Side, J. An overview of seabed-mapping technologies in the context of marine habitat classification. Ices J. Mar. Sci 2003, 60, 411–418. [Google Scholar]
- Huff, L.C. Acoustic remote sensing as a tool for habitat mapping in Alaska waters. Mar. Habitat Mapp. Technol. Alsk 2008, 10, 29–45. [Google Scholar]
- Copeland, A.; Edinger, E.; Devillers, R.; Bell, T.; LeBlanc, P.; Wroblewski, J. Marine habitat mapping in support of marine protected area management in a subarctic fjord: Gilbert Bay, Labrador, Canada. J. Coast. Conserv. 2013, 17, 225–237. [Google Scholar]
- Legendre, P. Spatial autocorrelation-trouble or new paradigm. Ecology 1993, 74, 1659–1673. [Google Scholar]
- Foster, S.D.; Bravington, M.V.; Williams, A.; Althaus, F.; Laslett, G.M.; Kloser, R.J. Analysis and prediction of faunal distributions from video and multi-beam sonar data using Markov models. Environmetrics 2009, 20, 541–560. [Google Scholar]
- Ferrier, S.; Watson, G.; Pearce, J.; Drielsma, M. Extended statistical approaches to modelling spatial pattern in biodiversity in Northeast New South Wales. I. Species-level modelling. Biodivers. Conserv 2002, 11, 2275–2307. [Google Scholar]
- Collin, A.; Archambault, P.; Long, B. Mapping the shallow water seabed habitat with the shoals. IEEE Trans.Geosci. Remote Sens 2008, 46, 2947–2955. [Google Scholar]
- Tulldahl, H.M.; Wikström, S.A. Classification of aquatic macrovegetation and substrates with airborne lidar. Remote Sens. Environ 2012, 121, 347–357. [Google Scholar]
- Collin, A.; Archambault, P.; Long, B. Predicting species diversity of benthic communities within turbid nearshore using full-waveform bathymetric Lidar and machine learners. PLoS One 2011, 6. [Google Scholar] [CrossRef]
- Tulldahl, H.M.; Philipson, P.; Kautsky, H.; Wikstrom, S.A. Sea floor classification with satellite data and airborne lidar bathymetry. Proc. SPIE 2013. [Google Scholar] [CrossRef]
- Valle, M.; Borja, A.; Chust, G.; Galparsoro, I.; Garmendia, J.M. Modelling suitable estuarine habitats for Zostera noltii, using ecological Niche Factor analysis and Bathymetric LiDAR. Estuar. Coast. Shelf Sci 2011, 94, 144–154. [Google Scholar]
- Hladik, C.; Schalles, J.; Alber, M. Salt marsh elevation and habitat mapping using hyperspectral and lidar data. Remote Sens. Environ 2013, 139, 318–330. [Google Scholar]
- Irving, A.D.; Connell, S.D. Interactive effects of sedimentation and microtopography on the abundance of subtidal turf-forming algae. Phycologia 2002, 41, 517–522. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Habitat Class | % Cover | Groundtruth Pixels (5 m) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Reef | Sediment | Brown Algae | Red Algae | Seagrass | Canopy Algae (i.e., Kelps) | Fine-Branching Algae | |||
| (a) | REEF | ≥75% | ≤25% | - | - | - | - | - | 992 |
| SED | ≤25% | ≥75% | - | - | - | - | - | 1416 | |
| REEF/SED | ≥25% | ≥25% | - | - | - | - | - | 1716 | |
| (b) | MB | - | - | ≥75% | ≤25% | Absent | - | - | 1192 |
| MR | - | - | ≤25% | ≥75% | Absent | - | - | 360 | |
| MBMR | - | - | ≥25% | ≥25% | Absent | - | - | 1076 | |
| SG | - | - | ≤25% | Absent | ≥25% | - | - | 76 | |
| NVB | - | - | Absent | Absent | Absent | 1348 | |||
| (c) | CAN | - | - | - | - | - | ≥75% | ≤25% | 1324 |
| FB | - | - | - | - | - | ≤25% | ≥75% | 1224 | |
| NVB | - | - | - | - | - | Absent | Absent | 1348 | |
| LiDAR Derivative | Description | Source | References |
|---|---|---|---|
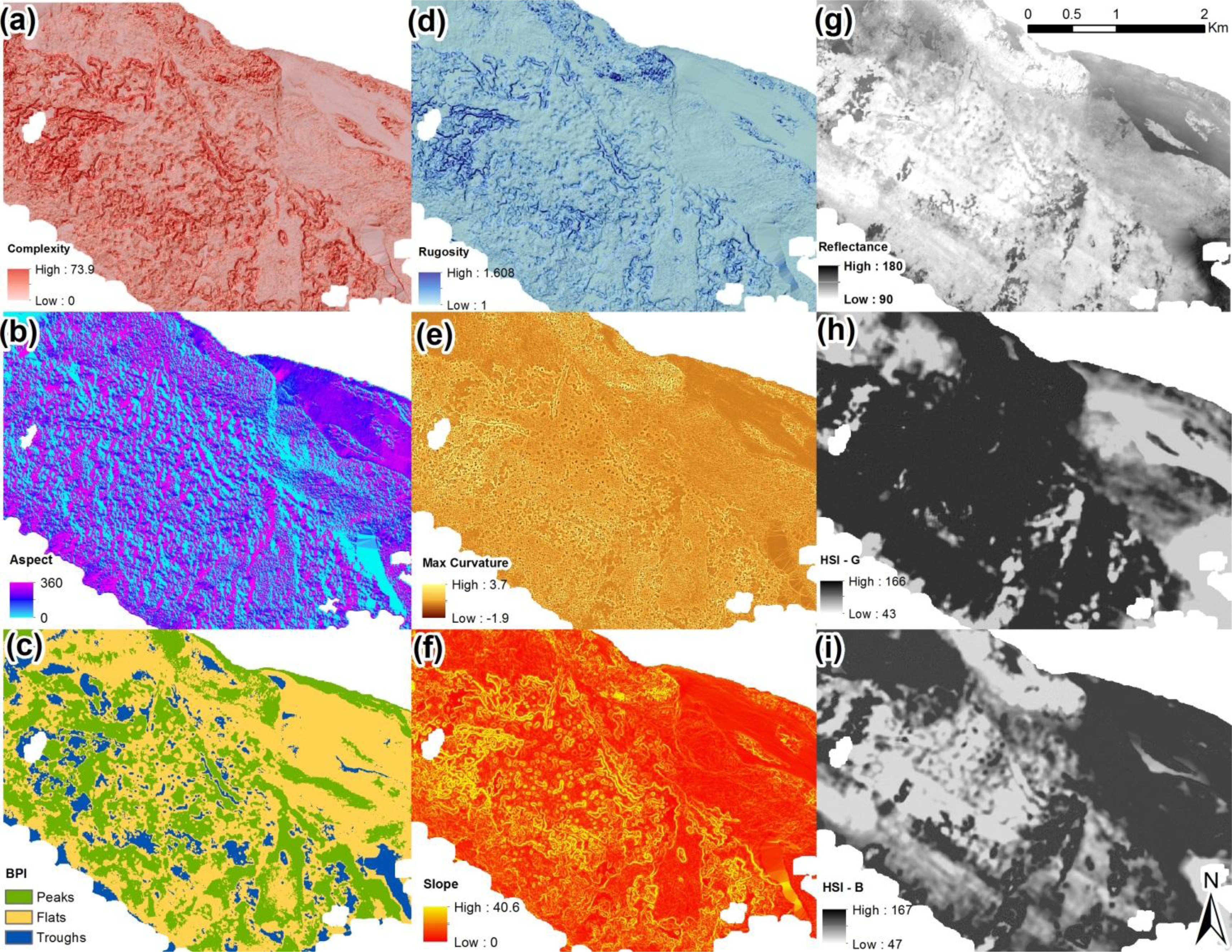
| Bathymetric Position Index (BPI) | A measure of the relationship between the elevation of a focal point compared to the elevation of the surrounding terrain, defining peaks, flats, and troughs. Both broad and fine scale BPI were produced, by defining different sampling radii (i.e., 50 m and 15 m) | Bathymetry | [34,35] |
| Maximum Curvature | Describes the curvature of surrounding pixels. Negative values indicate concave surfaces, while positive values indicate convex surfaces. | Bathymetry | [36] |
| Aspect | Identifies the orientation of each pixel with values between 0 and 359 degrees, using the value of the steepest down-slope direction from each pixel to its adjacent neighbours. | Bathymetry | [37] |
| Slope | The Slope function derivative denotes the maximum rate of change between each pixel and its neighbours. Slope values are defined by a tangent to a surface, , where (d) and (e) are coefficients of the quadratic equation representative of the surface. | Bathymetry | [38] |
| Rugosity | A measure of surface roughness; values that are closer to zero represent a smooth surface with low rugosity, while high values indicate a rough surface. Rugosity data is derived from the ratio between flat surface area and the curved surface area of a defined group of 5 m pixels. | Bathymetry | [34,35] |
| Complexity | Complexity is derived from the Slope derivative product and is defined as a second derivative of elevation, i.e., a measure of the slope of the slope. The greater the variability in the slope between a pixel and its adjacent neighbours, the higher the surface complexity. | Bathymetry | [38] |
| Hue Saturation Intensity (HSI) | HSI was employed to separate surface scattering and topographic influence, effectively reducing noise levels within the reflectance dataset. HSI is a three band (i.e., red, green, blue) synthetic color image, separating areas of low and high frequency reflectance by mapping them to Hue (dominant colour wave-length of pixel) and Intensity (measure of pixel brightness). Filter parameters: Hi-pass = 3; Low-pass = 11. | Reflectance | [39] |
| (a) | |||||
|---|---|---|---|---|---|
| Map Class | Error Assessment Class | ||||
| REEF | REEF/SED | SED | Total | User’s Accuracy | |
| REEF | 145 | 62 | 0 | 207 | 70.1% |
| REEF/SED | 95 | 284 | 40 | 419 | 67.8% |
| SED | 8 | 63 | 314 | 385 | 81.6% |
| Total | 248 | 409 | 354 | 1011 | |
| Producer’s Accuracy | 61.1% | 62.2% | 92.6% | Te = 0.623 | |
| (b) | |||||||
|---|---|---|---|---|---|---|---|
| Map Class | Error Assessment Class | ||||||
| NVB | SG | MB | MBMR | MR | Total | User’s Accuracy | |
| NVB | 308 | 19 | 16 | 17 | 22 | 382 | 80.6% |
| SG | 0 | 0 | 1 | 0 | 0 | 1 | 0% |
| MB | 13 | 0 | 222 | 94 | 17 | 346 | 64.2% |
| MBMR | 8 | 0 | 53 | 144 | 12 | 217 | 66.4% |
| MR | 8 | 0 | 6 | 14 | 39 | 67 | 58.2% |
| Total | 337 | 19 | 298 | 269 | 90 | 1013 | |
| Producer’s Accuracy | 93.6% | 0% | 74.1% | 46.3% | 49.1% | Te = 0.648 | |
| (c) | |||||
|---|---|---|---|---|---|
| Map Class | Error Assessment Class | ||||
| NVB | CAN | FB | Total | User’s Accuracy | |
| NVB | 228 | 16 | 37 | 281 | 81.1% |
| CAN | 8 | 261 | 63 | 332 | 78.6% |
| FB | 105 | 54 | 206 | 365 | 56.4% |
| Total | 341 | 331 | 306 | 978 | |
| Producer’s Accuracy | 73.3% | 77.2% | 64.8% | Te = 0.580 | |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Zavalas, R.; Ierodiaconou, D.; Ryan, D.; Rattray, A.; Monk, J. Habitat Classification of Temperate Marine Macroalgal Communities Using Bathymetric LiDAR. Remote Sens. 2014, 6, 2154-2175. https://doi.org/10.3390/rs6032154
Zavalas R, Ierodiaconou D, Ryan D, Rattray A, Monk J. Habitat Classification of Temperate Marine Macroalgal Communities Using Bathymetric LiDAR. Remote Sensing. 2014; 6(3):2154-2175. https://doi.org/10.3390/rs6032154
Chicago/Turabian StyleZavalas, Richard, Daniel Ierodiaconou, David Ryan, Alex Rattray, and Jacquomo Monk. 2014. "Habitat Classification of Temperate Marine Macroalgal Communities Using Bathymetric LiDAR" Remote Sensing 6, no. 3: 2154-2175. https://doi.org/10.3390/rs6032154
APA StyleZavalas, R., Ierodiaconou, D., Ryan, D., Rattray, A., & Monk, J. (2014). Habitat Classification of Temperate Marine Macroalgal Communities Using Bathymetric LiDAR. Remote Sensing, 6(3), 2154-2175. https://doi.org/10.3390/rs6032154