1. Introduction
The analysis of the change of the Earth’s surface relies on time series of DEMs, which in turn rely on the high quality acquisition and processing of data. The last few years have seen an impressive expansion of the operating satellite systems—both optical, such as Pleiades or Worldview, or microwave, such as TerraSar-X—that are able to produce very high resolution products with minimal errors, but whose spatial and/or temporal cover is limited [
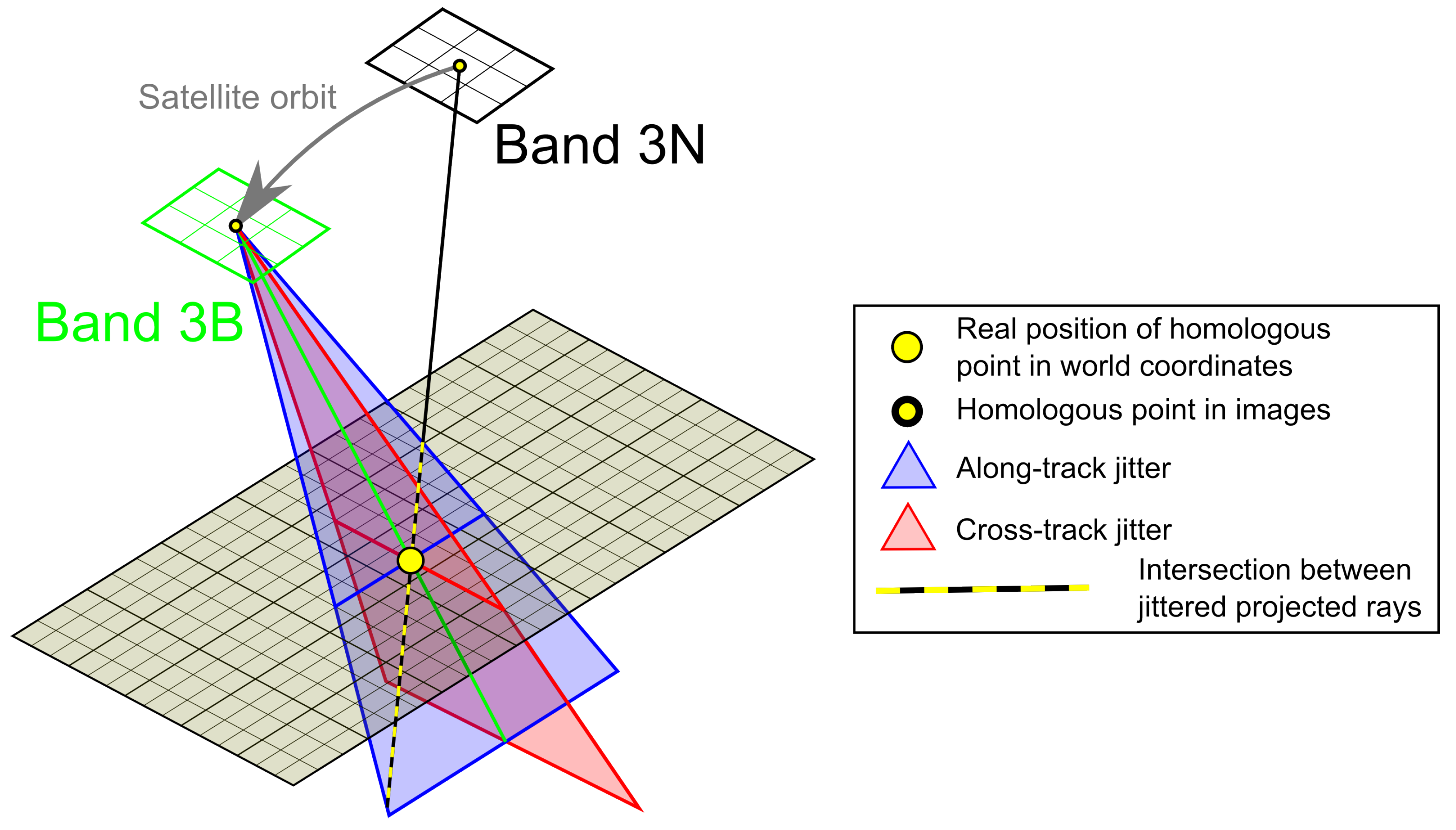
1]. The Terra (EOS AM-1) satellite was launched in December 1999 on a Sun-synchronous orbit with the Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) system on board. For more than 17 years, pairs of stereo images were collected by ASTER globally at a 15-m resolution in the near infra-red band, making its data the largest consistent multi-temporal dataset of stereo images available worldwide. The pairs consist of a nadir-pointing image (Band 3N) and a back-looking image (Band 3B) with an effective 30.6° parallax angle. However, the data are plagued with a high frequency satellite jitter that induces an attitude perturbation. This jitter yields at least three superimposed sinusoidal signals in both cross-track and along-track directions in the DEM comparison between the standard DEM product (AST14DMO) and the ground truth [
2], or between ASTER and QuickBird images [
3]. The low acquisition frequency and limited precision of the GNSS/IMU platform and star camera prevent the on-board estimation of jitter using the metadata alone. The jitter-induced waves were estimated by [
4] as a combination of waves of 4.6-km and 34-km frequency in both cross-track and along-track directions. The nadir axis jitter (yaw) is described as not having a significant influence (millimeters). Proposed causes for this disturbance include the mechanical cooling system, the rotation of mirrors and movements of the high gain antenna, but a source is yet to be formally identified.
A solution to correct the jitter in the SWIR system (pseudo-nadir, short wave infra-red band) was proposed by [
5] using the very short time delay between the acquisition of Bands S4–S9. A similar approach was demonstrated in [
6] and tested by [
7] for the ZY-3 (Ziyuan 3) system. However, it cannot be applied to correct the ASTER VNIR system (pseudo-nadir and back-looking, green, red and near infra-red band) since “The VNIR subsystem is free from [band to band] parallax error because a dichroic filter divides incident light into each VNIR band.” [
5]. Furthermore, only one band (near infra-red) is captured by the back-looking telescope. More recently, [
8] presented a method to correct jitter perturbations in the data acquired by the ZY-3 satellite, relying on a much more modern IMU system that provides enough information to directly estimate jitter.
Today’s standard DEM product from ASTER is generated by NASA with the SilcAst (
http://www.silc.co.jp/en/products.html) software and is packaged in the AST14DMO product. Other available commercial software such as PCI Geomatica or ENVI can also produce ASTER DEMs. However, none of these products provide a sufficient geometric quality for a number of applications such as glacier volume change estimation over short periods, the expected change being significantly smaller than the accuracy of the product (a few meters against
m [
9]; see
Figure 1 for the DMO over a sea ice (flat) scene).
Our objective is to offer a processing workflow that can produce higher quality products for any ASTER scene. This means that the method cannot rely on the use of Ground Control Points (GCPs) as suggested by [
10,
11,
12] or on a ground truth obtained by other methods on stable terrain because such a ground truth is not consistently available or of sufficient quality (the SRTM mission only covering 60° N–56° S, for instance). To this aim, we have developed MMASTER (where MM stands for MicMac, the photogrammetric processing library in which we implemented our work), a DEM processing tool that does not rely on external data sources, takes into account and corrects the jitter and improves the quality and completeness of ASTER DEMs compared to the data included in the AST14DMO product. The main scientific objective of MMASTER is to provide better and unbiased differences between DEMs (dDEMs) for topographic change analysis.
In this paper, we first present the MMASTER processing chain in depth, then a number of examples showcasing the relevance of improved topographic change measurements for a number of scientific fields, such as landslide and soil erosion, forestry, volcanology and glaciology.
3. Use Cases and Applications
In the following sections, we assess how MMASTER performs under different scene conditions and demonstrate some examples of how the data created through the MMASTER process can be used for different scientific applications. We use different external data for validation, comparison and quality qualification. In our assessment studies and application scenarios, the focus is on investigating MMASTER performance and not on in-depth analysis of the geophysical phenomena shown.
3.1. Mountainous Terrain and River Landforms in Alaska: MMASTER vs. DMO vs. Alaska IFSAR
Our goal for the first scenario was to test our processing in a more challenging topographic environment, so we chose a mountainous area in northwestern Alaska where a high-quality IFSAR DEM flown in summer 2012 was available for quality assessment (data available from the U.S. Geological Survey; see
https://lta.cr.usgs.gov/IFSARAlaska). The area includes neither glaciers, nor large unstable features, so we considered the whole scene to represent stable terrain. However, the improvement in DEM quality offered by MMASTER revealed very clear patterns of elevation differences around the river beds.
The ASTER L1A scenes (dataset reference in
Table 2) were processed as described above, using the IFSAR (InterFerometric Synthetic Aperture Radar) DEM as the ground truth for the along-track bias removal.
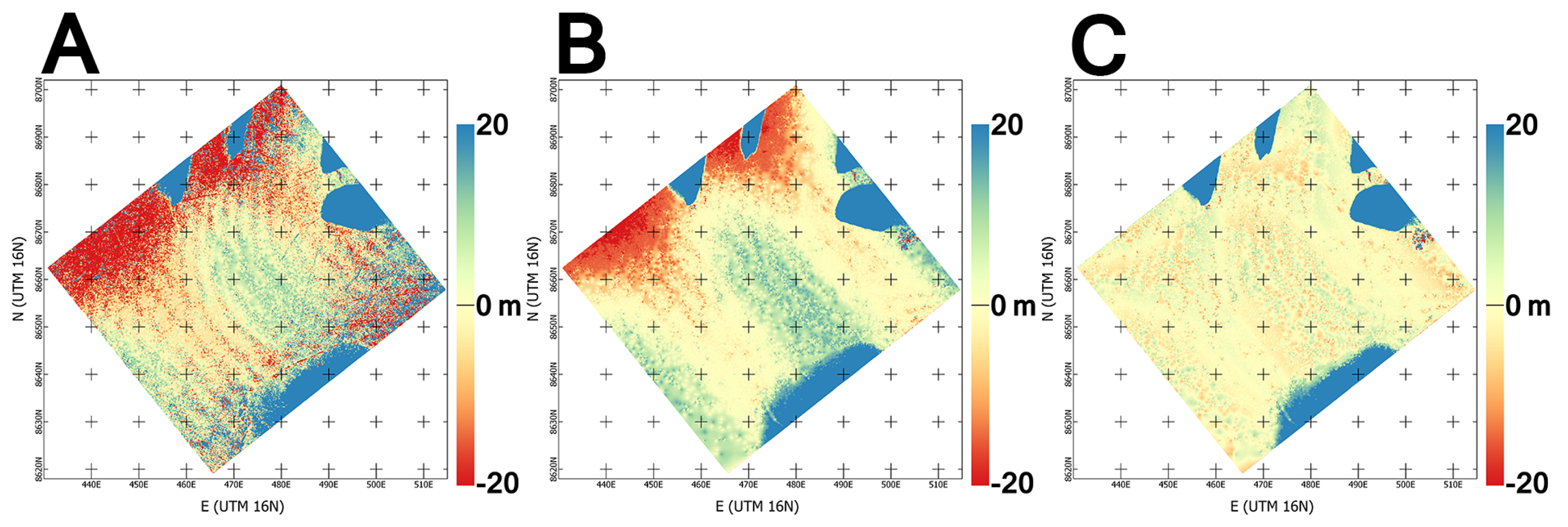
Figure 10 shows the elevation change derived from a co-referenced DMO (A) and from a processed MMASTER scene (B). The statistical distribution of the elevation change is quite similar for both scenes (
m for the DMO and
m for the MMASTER), because the amplitude of the corrections made through the MMASTER process is in the same range as the remaining noise.
Nonetheless, the elevation change/error map reveals that MMASTER offers a better spatially-spread distribution with reduced local bias and noise. In the MMASTER-IFSAR difference, local patterns of elevation differences around the river beds are apparent, which are not visible in the DMO-IFSAR difference as they are hidden by the high frequency noise (see
Figure 11).
The patterns visible around the river beds seem at first sight to be related to river erosion; however, both their magnitude (that would reach extreme values of up to
m·y
of elevation lost) and their distribution (sometimes far away from the actual position of the rivers between 2010 and 2012) leads us to conclude that river erosion may not be the main source of elevation differences between the two datasets. Further inspection of the processing of the IFSAR data (described in [
21]) and a look at higher resolution pictures of the area (taken from the ground) reveal that the patterns of elevation change are actually somehow correlated with the presence of trees close to the river banks. Such trees are less commonly found further away from the rivers, where the vegetation is mainly bushes and grass, typical for the tundra environment. The dual-band IFSAR is indeed processed so as to reveal the bare earth, while MMASTER captures the top of the canopy (up to ≈10 m high trees). It is quite impressive to be able to detect such a clear pattern of radar penetration when the amplitude of the phenomena is only in the order of 5 m, showing that the MMASTER DEM precision is even better. Another factor explaining the elevation-difference pattern is that the sharpness of the terrain is much better resolved in the 5-m posting IFSAR data than in the MMASTER, where cliffs and other steep slopes tend to be softer, as we can see in the thin red patterns of elevation difference for very narrow valleys (<200 m).
Comparison with an ASTER scene from 2012 does not reveal such clear patterns (see
Figure 11C), but we can still see some elevation difference around the river that correlates with visible meandering. These patterns of a few meters of elevation change, which seem to superimpose on the apparent elevation change measured with the IFSAR, in the actual river bed (or in what became palaeochannels) can only be attributed to actual erosion.
Errors in steep terrain are well visible because the resulting ASTER-derived DEMs are somehow softer (and of lower resolution) than the IFSAR DEM. Steep terrain is also affected by the stereo configuration of the ASTER system with a large back-looking angle that creates images with limited view on north-facing slopes (completely hidden for slopes over 60°) and stretched out south-facing slopes. To counteract this effect, more modern satellites designed with fixed stereo configurations use(d) either aft and back-looking images (for example, the SPOT5 HRS system had −20° and +20° telescopes) or even three telescopes (aft, nadir and back-looking) like ALOS PRISM (−24°, 0°, +24°). A third factor affecting the elevation of steep terrain is that at high north (resp. south) latitude, the Sun angles (particularly in winter) are such that north-facing (resp. south) slopes are in the shadow and therefore present very low contrast for the correlator to grasp (see
Figure 12).
Through this example we show the accuracy on stable terrain, the ability to detect river erosion of about 2 m (which was impossible with AST14DMO data), the ability to evaluate vegetation penetration compared to a radar-interferometry DTM (here, IFSAR) and the limits of the stereo configuration of the ASTER system to evaluate north-facing slopes.
3.2. Earthquake 2D Displacement Estimation
In this scenario, the higher precision orthorectified imagery provided by MMASTER (dataset reference in
Table 3) is used to identify the position and quantify the magnitude of co-seismic slips caused by an earthquake. The improvement of the quality of the DEM compared to the DMO product results in better orthorectification as vertical DEM errors propagate into lateral displacement in the orthoimages [
22]. Measurement of seismic displacement using ASTER images has been attempted previously, with varying degrees of success, for instance by [
23,
24].
On 14 November 2016, New Zealand experienced a
earthquake near Kaikoura. This fault slipped by up to 10 m in certain areas, two thirds of an ASTER pixel. Subpixel displacement estimation is not a challenge with modern software, and we exploited the integrated tool MM2DPosSism of MicMac [
25] to perform the measurements. Such displacements are easier to measure with the more modern Landsat-8 and Sentinel-2 data, but these products have not been available for very long. Selecting such a modern earthquake provides the ability to use them as a ground truth (data processing and analysis was done in the studies of [
26]). The vertical displacement is not of high enough magnitude and either too spread or too local to be identified with the MMASTER product on a point-by-point basis.
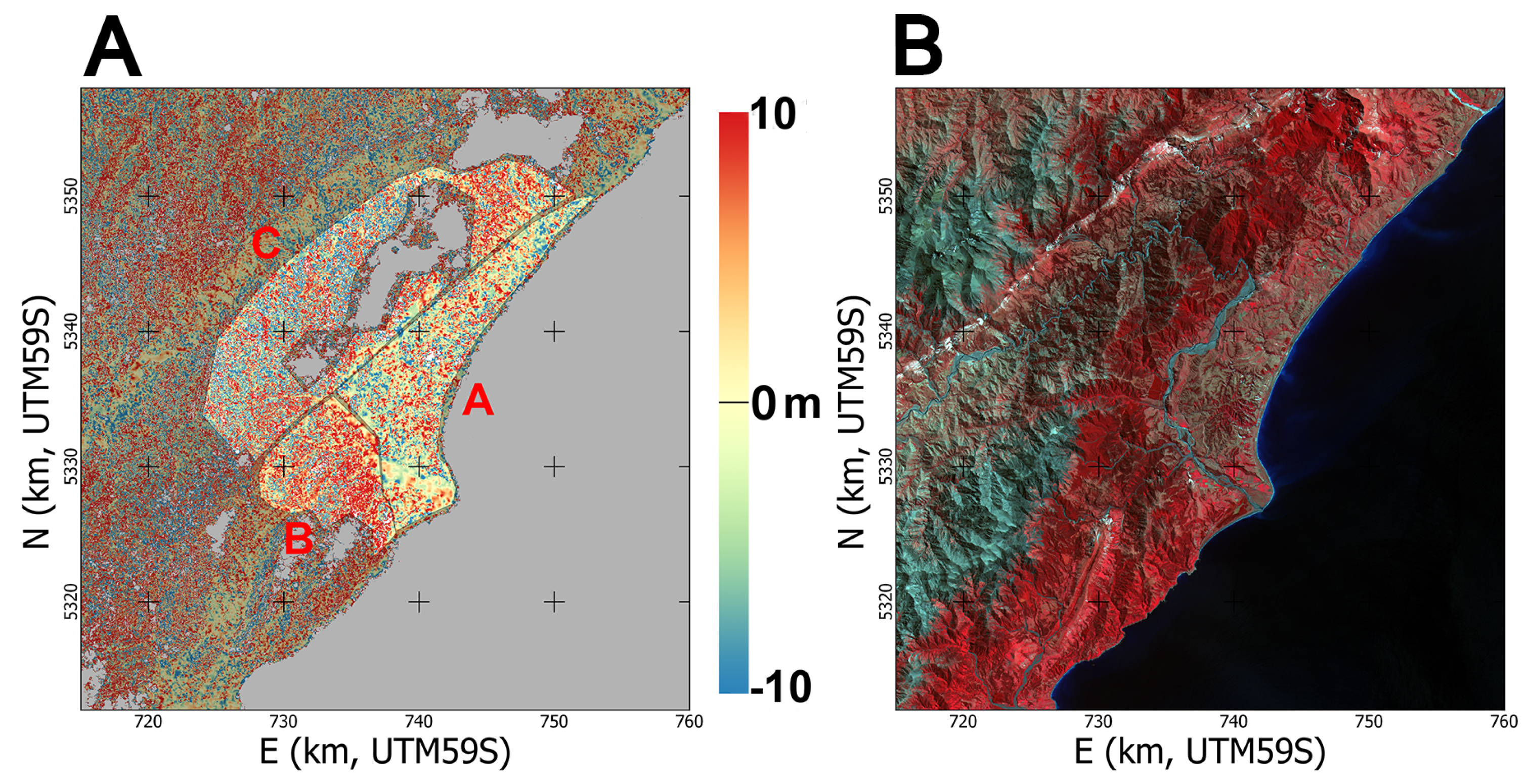
In
Figure 13, we display the measurement of the movement in an Euclidean system rotated by 45°, where the Kekerengu fault lies roughly along one axis and the Papatea fault on the other, in order to emphasize the faults. On the southwest to northeast axis (
Figure 13A), the displacement at the Kekerengu fault line is measured as
m or
pixels. On the northwest to southeast axis (
Figure 13B), the displacement at the Papatea fault line is measured as
m or
pixels. These displacements are in accordance with the values measured from the much more accurate and modern Sentinel-2 and Landsat-8 data by [
26] (respectively, 9 m and 6.5 m for the Kekerengu and Papatea faults).
Another validation source could be data from GNSS networks (available from
http://www.geonet.org.nz/data/types/geodetic). Data from the stations in the general area of the faults for the period surrounding the earthquake event validate the directions of the displacements, but the density and location of the GNSS stations do not permit one to see the fine details of the displacements, nor their magnitude in the immediate vicinity of the fault lines. Indeed, only one station is in the area depicted in
Figure 13 and
Figure 14.
Using the position of the faults identified from the horizontal displacement, three zones can be defined to compute statistics of the vertical displacement (see Zones A, B and C in
Figure 14A). Taking Zone C as the reference, Zone B was subject to an uplift in the order of
m, while Zone A shows a
m settlement. The zonal-statistical approach is necessary here because the signal is close to the accuracy limit of the product, and the DEMs are fairly noisy over rugged terrain.
Through this example, we show that MMASTER data can be used for sub-pixel scale (≈5 m) displacement analysis in both planar and vertical directions. Even if the more modern systems can provide more accurate information (at least in 2D), this opens the possibility to measure such displacement for events that have happened further in the past ≈15 years.
3.3. MMASTER on Volcanic Processes
Active volcanic areas are known to experience significant topographic changes due to numerous surface and subsurface processes. We generate MMASTER DEMs over the Puyehue-Cordón Caulle volcanic complex, southern Chile, where a voluminous explosive eruption occurred in June 2011. The eruption resulted in a number of substantial topographic changes: (1) the effusion of a massive, 30–45 m-thick rhyolite lava flow that emanated from an effusive vent on the NNW flank of the volcano [
27], (2) the shallow emplacement of a laccolithic intrusion that triggered a >200-m bulge of the Earth’s surface and (3) the thick deposition of explosive material as a result of pyroclastic flows. In addition, the eastward transport of the eruptive column led to thick ash and tephra deposits [
28], which considerably affected the ecosystems of the regions east of the volcano [
29], including killing the vegetation due to the toxic ash concentration. The Puyehue-Cordón Caulle volcanic complex is thus an ideal case study for assessing the relevance of our method to quantify topography changes resulting from volcanic activity.
For this scenario, we differenced the MMASTER DEMs from two scenes 10 years apart (dataset reference in
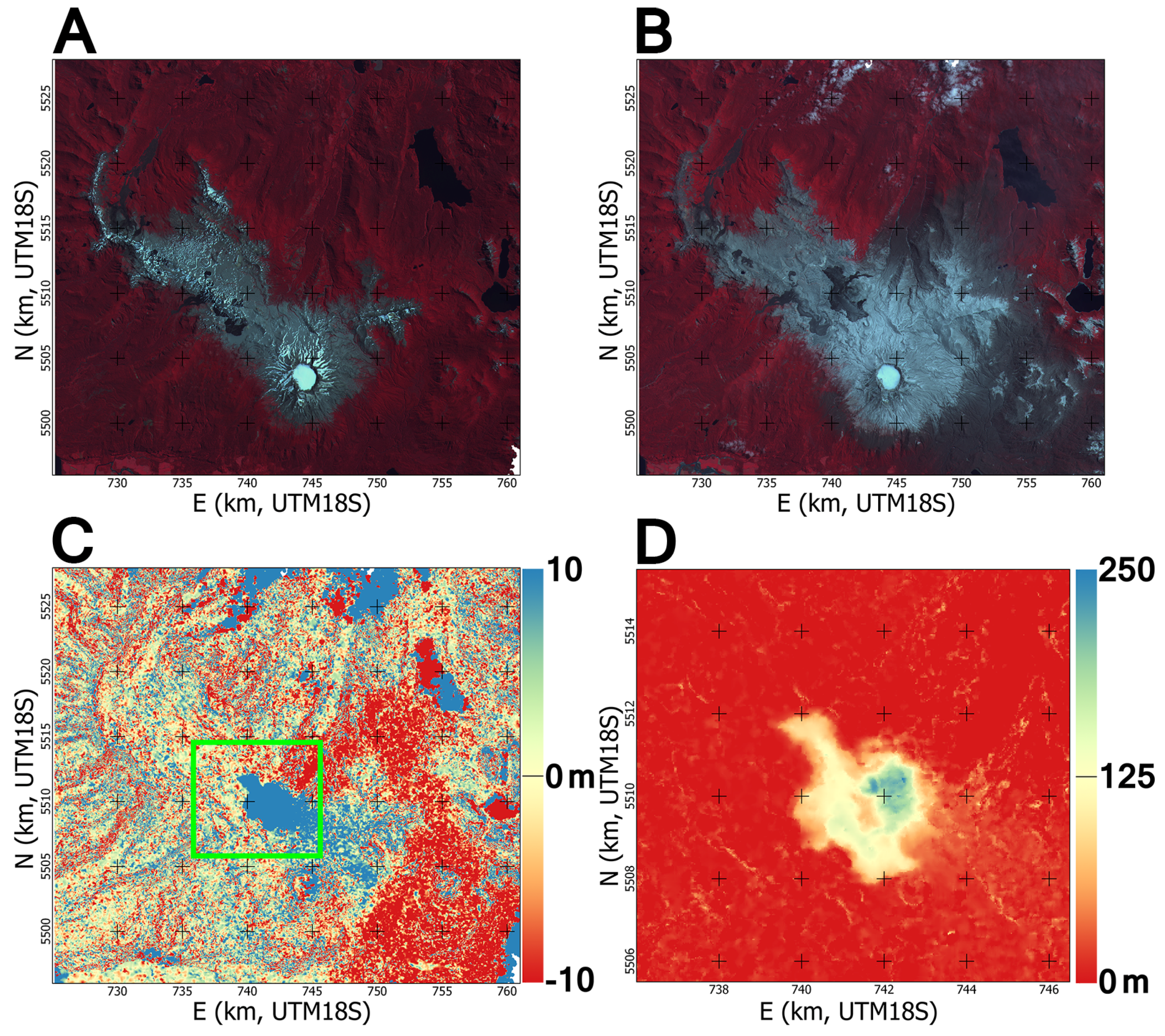
Table 4), the first one in 2003 (i.e., before the 2011 eruption) and the second in 2013 (i.e., after the end of the 2011 eruption). The comparison between both images (
Figure 15A,B) clearly highlights (1) the dark rhyolitic lava flow NNW of the summit Puyehue caldera and (2) the distribution of thick pyroclastic deposits, in light grey. The 2013 image also displays a dark aureole surrounding the main volcanic edifice to the north, east and south. In the 2003 image, this area corresponds to vegetation; therefore, we interpret this dark aureole as regions where the forest was killed by the ash deposited during the main eruption.
Figure 15 displays two dDEM maps with distinct color scales. In the right map, the color scale spans from 0–250 m to highlight substantial topography change at the vicinity of the main eruptive vent. The topographic pattern displays: (1) a sub-circular feature of 200–250 m in amplitude, which corresponds to a combination of surface bulging due to the shallow laccolith emplacement and deposition of erupted materials, and (2) an elongated, relatively flat feature of 125 m in amplitude, which corresponds to the rhyolitic lava flow. The topography difference calculated with MMASTER shows the same patterns as that described by [
30], computed using the ASTER GDEMv2 and a Pleiades DEM.
Other interesting results are given by the other dDEM map, with color scale ranging from −10 m–10 m. This map displays an aureole to the north, east and south of the volcano with average elevation difference of −10 m. This aureole exactly correlates with the dark gray aureole in the 2013 image, interpreted as the forest (appearing red in the 2003 G-R-IR orthoimage) killed by the ash deposits. We thus infer that this aureole of apparent subsidence is not an artifact, and the topography difference corresponds to the overall thickness of the vegetation cover that died after the eruption. The map also displays a slightly more elevated (<+10 m) zone close to the summit caldera. This zone exactly correlates with the visible light gray areas corresponding to thick ash deposits. Our product is therefore able to detect the local, thick pyroclastic deposits produced during the eruption, though it is not able to detect tephra deposits of a few tens of centimeter thickness observed far away from the volcano [
29].
3.4. MMASTER on Tree Surface and dDEM
Large parts of the Earth are covered by forest, so we also aimed at assessing MMASTER performance over forested areas. For this scenario, we show that MMASTER products can be successfully computed over vegetated areas (using the dataset referenced in
Table 5). Such data can be used to evaluate the biomass loss by clear-cuts in the Amazonian forest since tree height is well correlated with biomass and so is biomass change [
31]. The aim of this application scenario is two-fold: (1) to detect the clear-cut areas and (2) to provide an estimate for the average tree height. Since no penetration of the signal is expected here, contrary to some radar-based altimeter products [
32], the data can be used as a complement or data validation.
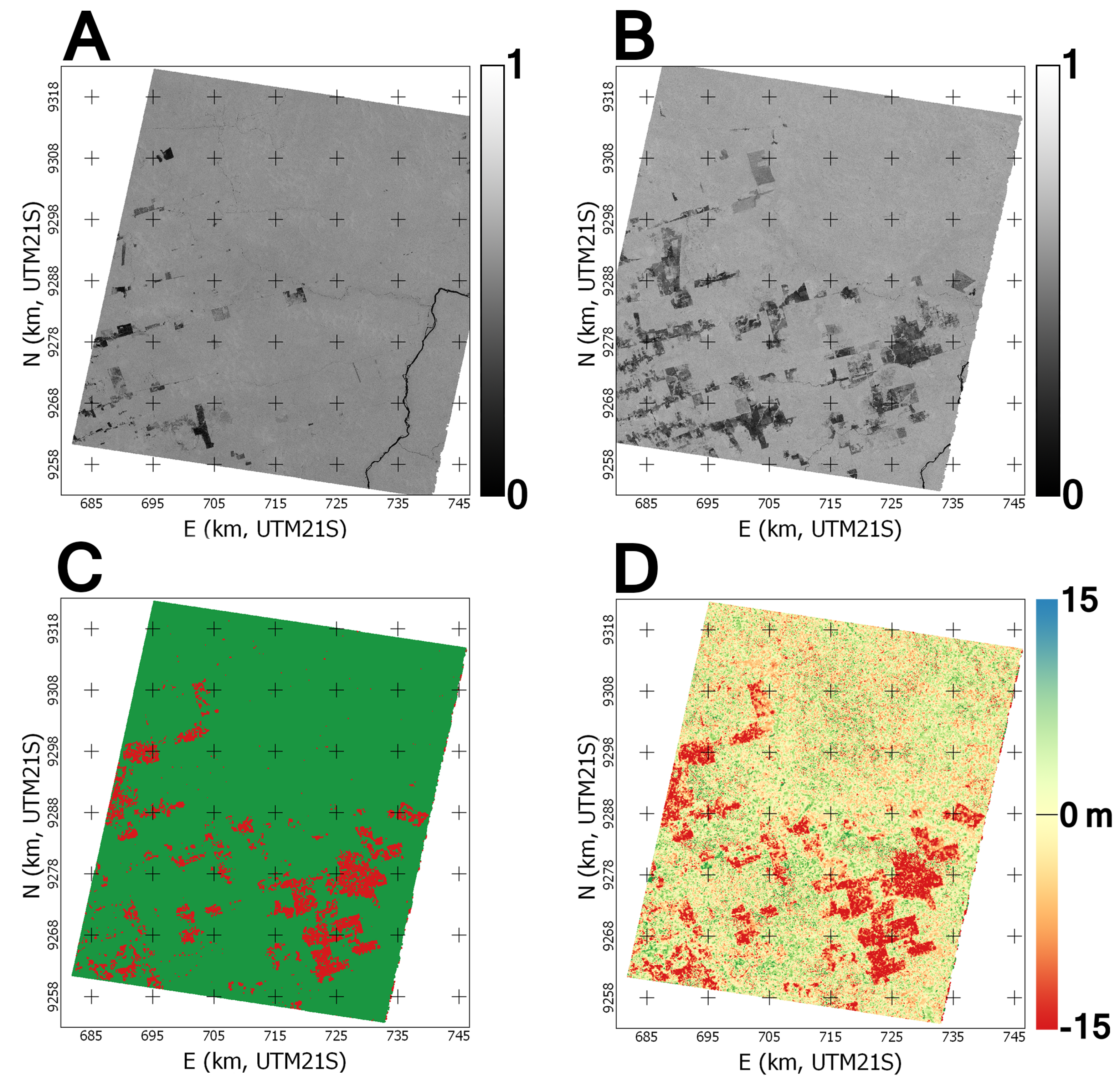
In this scenario, an extra processing step is necessary to mask the area of clear-cut that cannot be filtered using pre-existing data. First, a dDEM needs to be produced to create a mask that can then be applied before removing the along-track jitter and computing the final dDEM. The mask is created by a thresholding of the uncorrected dDEM (in this case, the threshold is set at
m) and then a morphological opening and dilating (5 × 5 square structuring element for both) of the result to obtain a binary mask of the clear-cut areas to be filtered out for the along-track correction. A similar approach is then followed to create the mask identifying clear-cut areas from the final dDEM. The final mask is shown in
Figure 16B.
Masking could also be done by identifying the clear-cut areas in the NDVI product that can be derived from the orthorectified data (see
Figure 16A,C, dark is low NDVI indicating no vegetation, while light is high NDVI indicating the presence of vegetation), since we can expect that the NDVI value would have dropped significantly (see for instance, the method discussed in [
33]). However, in the case of re-exploited clear-cut areas (by soybean plantations, for instance), the NDVI-based method would fail.
A statistical analysis of the final dDEM (shown in
Figure 16D) over the areas that have been clear-cut (representing 276.9 km
or
of the total scene) yields a mean elevation change of
m, while the areas not showing any cuts (2946.6 km
or
) yield
m. If the standard deviation is not insignificant, it is in both cases within the expected range for soft terrain, showing that the DEM accuracy is not significantly degraded in tree-covered areas.
Our example over the Amazonian forest suggests that tree heights, or their strong changes (here: man-made clear-cuts) can be extracted from MMASTER DEMs. DEM extraction of the forest was surprisingly unproblematic given the repetitive structure of forest that may lead to confusion of the correlator. Extracting tree heights or their changes over time over large areas from ASTER scenes might be useful for spatio-temporal combination with radar DEMs or radar/laser altimetry due to their different penetration into the canopy or different spatial or temporal coverage.
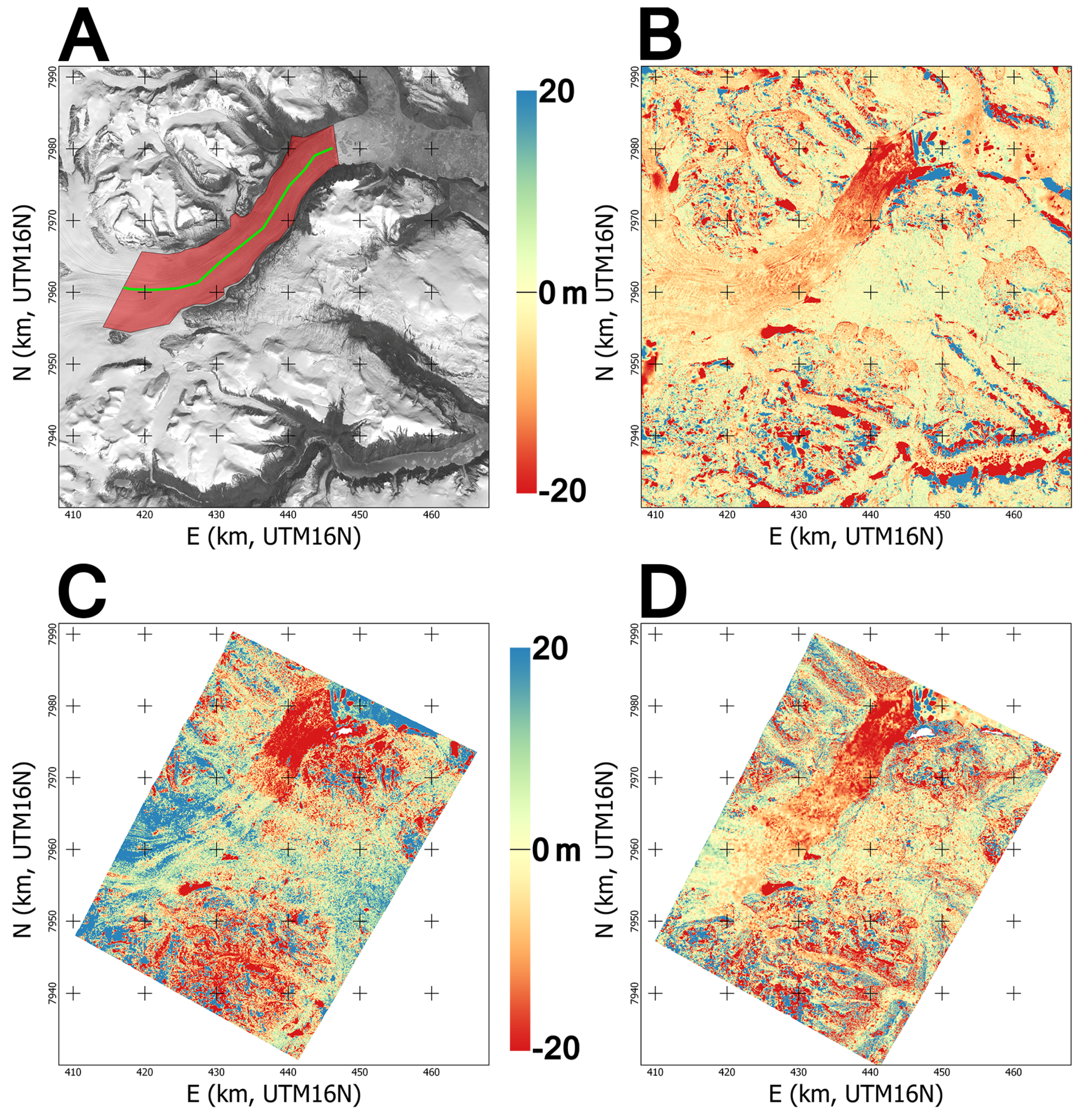
3.5. MMASTER for Large Glacier Elevation Change
For our fifth and final scenario, we wanted to demonstrate the use of MMASTER DEM differencing over a glacier and compare it with independent validation data. We thus needed an area with two ASTER scenes acquired at timestamps corresponding to the acquisition of independent data. We found such an area around Daugard-Jensen glacier in eastern Greenland. It was covered by data from the SPIRIT project (SPOT 5 HRS stereoscopic survey of Polar Ice: Reference Images and Topographies [
34]) and by ASTER in 2007 and 2014 nearly simultaneously (with respectively four- and 10- day delays between the two systems. The references and exact dates of the acquisitions are listed in
Table 6).
The SPIRIT project used SPOT 5 HRS stereo pairs to create DEMs over selected important polar regions at a 40-m GSD in UTM projection. The accuracy of the DEMs produced by the SPOT 5 HRS system has been assessed at around 5 m (relative) and 10/15 m (absolute) [
35]. After co-registration of two of these products, we can therefore expect an accuracy of the elevation difference of around 7 m.
Elevation change grids were computed for each dataset with co-registered products (the SPIRIT scenes together, on the one hand (see
Figure 17B) and the two DMO scenes together, on the other hand (see
Figure 17C)), or for the MMASTER product, after application of our method (see
Figure 17D). Our analysis focuses on the part of Daugaard-Jensen glacier that is visible in both ASTER scenes. The approximate centerline and the selected area are shown in
Figure 17A.
We first extracted the 2007–2014 elevation change values over the centerline for each dataset. The difference between the SPIRIT elevation change values (considered ground truth with a
m accuracy) and both the DMO and MMASTER values are plotted in
Figure 18. The MMASTER values are for the most part (82%) inside of the
m accuracy band given by the SPIRIT data (agreement of
m), while the DMO is significantly off (agreement of
m, with only 30% in the accuracy band). The DMO data show both error trends and sharp error peaks reaching 175 m, while the MMASTER is fairly contained (max. error of 24 m). While the error trend should stem from the long-wavelength jitter effects not accounted for in the DMO in contrast to the MMASTER DEM, we assume that the sharp error peaks could in parts be due to the cross-track jitter not accounted for in the DMO processing. Corresponding points in the ASTER stereo data can have a cross-track offset from the (approximately along-track) epipolar line that is too large to match between them when using a directional (i.e., along-track) correlation algorithm with insufficient cross-track margin.
We then compared the volume change computed for the selected area of the main glacier (see
Table 7). For the Daugaard-Jensen outlet glacier section, it appears that while the MMASTER and the SPIRIT data are in relative accordance with a
-m difference in estimation of the mean elevation change from the MMASTER data compared to the SPIRIT data, the DMO data show significantly different values, as well as a
-m difference in estimation of the mean elevation change, hence concluding that the glacier is experiencing volume gain.
With this example, we show that it is possible to fit corrections to the bias observed on stable ground and produce MMASTER dDEMs that are suitable to survey glacier elevation change with an accuracy better than
m, whereas it proved challenging to obtain good data with the DMO products. MMASTER products show good accordance with SPIRIT products (that have themselves been proven to be adequate for mapping glacier elevation change by [
34]). It must however be noted that the glacier surface is a type of surface at risk of being contrast-free if fresh, soft snow is present, or if the ASTER gain settings are not setup for glacier brightness (then the white surface is saturated, and no data can be extracted).
4. Discussion
With MMASTER, a new and modernized method to produce DEMs from ASTER L1A data is available to users. We have shown that the potential applications for the ASTER data, which were already numerous with the AST14DMO product, are now even more varied. The increased data quality (accuracy and coverage) also offers the ability to extract more accurate surface difference data (reducing the error bars in dDEMs), thereby enabling applications that were previously not possible.
The main improvements of MMASTER compared to the AST14DMO are significantly reduced local noise as a result of (1) the cross-track parallax corrections, leading to better correlation, and (2) a more modern correlator, as well as the large-scale bias removal from both the cross- and along-track corrections. The latter bias removal is important for a number of applications where the actual elevation change patterns resemble in parts the typical elevation pattern caused by the jitter. For example, elevation changes by glacier surges may look in parts similar to the elevation changes induced jitter and, thus, lead to incorrect interpretations [
36]. As a further advantage, the improved MMASTER DEMs lead to orthoimages with reduced distortions and enable thus improved displacement matches.
Determining the quality of either a single MMASTER DEM or of an MMASTER dDEM is difficult to reduce into a single number. Indeed, terrain characteristics such as terrain ruggedness, texture or even orientation can lead to abnormally noisy data. A bad gain setting of the ASTER system during image acquisition might also reduce the contrast in the scene dramatically, leading to substandard products. As shown in
Figure 9 and
Table 1, in an ideal scenario, the standard deviation of an MMASTER DEM can fall down to better than
m (compared to the
m of the DMO product for the same scene, coherent with the number given by [
9]). Examples in
Section 3.3,
Section 3.4 and
Section 3.5 show that a standard deviation of
m can be expected over terrain that is not too rugged, even with soft ash deposits, tree cover or mostly bright glacier surfaces.
However, even with the improved processing, ASTER DEMs are still quite imperfect, and some precautions are needed when using these data. Indeed, the accuracy reduces to
m when a significant part of the scene is very rugged terrain (see
Section 3.1), because (1) MMASTER DEMs are fairly smooth, the correlation being done on 45 m-wide windows (three pixels) and the final product being a DEM at 30-m GSD, and (2) north-facing slopes are badly imaged by the nadir- and back-looking (northward looking) telescopes (see
Figure 12).
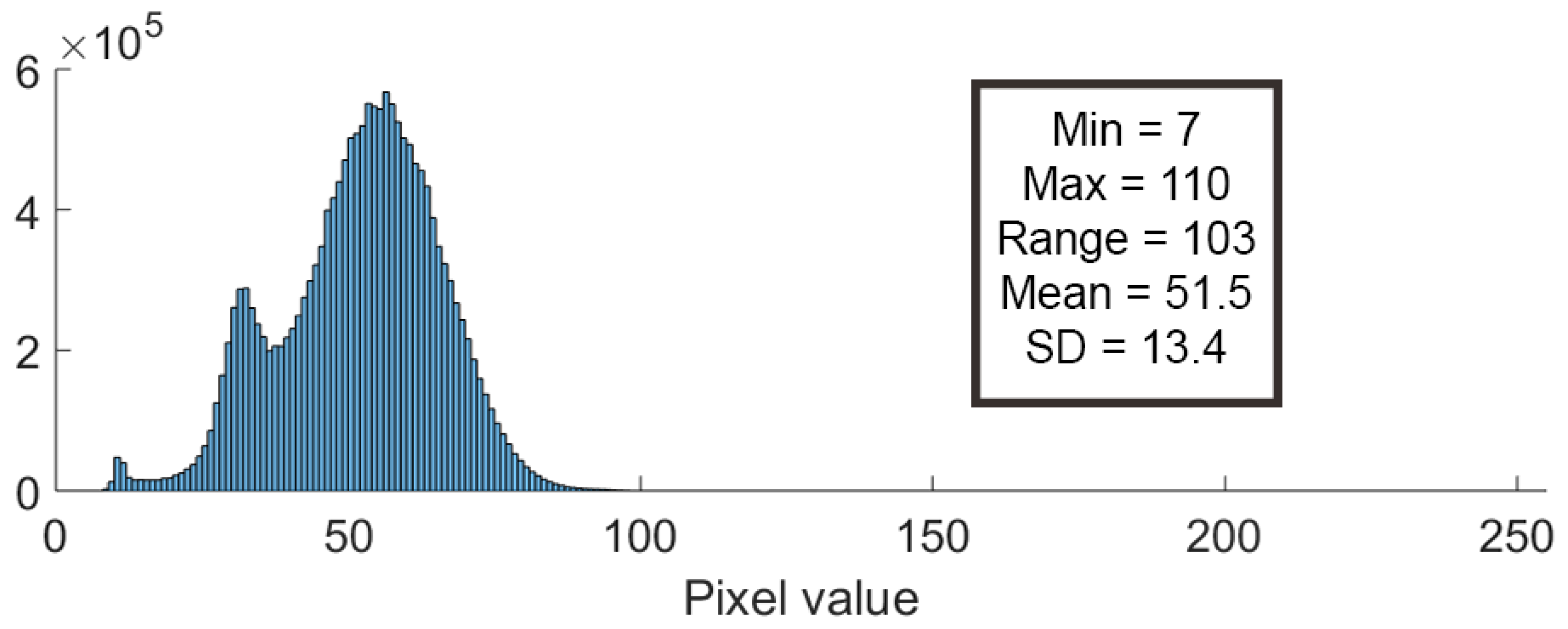
Low-contrast surfaces can also be a problem, as ASTER’s VNIR sensor does not deliver very high dynamic images (nominal bit depth is eight bits, but the histograms are rarely well distributed; see
Figure 4). Bright (like snow, ice (see, for instance, the noise over the small ice cap area just east of the bottom of Daugaard-Jensen glacier’s tongue in
Figure 17D) or sand) and dark (mostly shadowed area) areas are often contrast-free and therefore do not provide data from correlation. In order to help the end users to quantify the quality of the data they are using, MMASTER outputs a correlation score map, advising to a degree on the dubiousness of the data. It is however important to notice that good correlation is not a guarantee of good data, as even clouds sometimes yield great correlation.
Larger scale effects (jitter) are also still visible in the output DEM before either a correction with a reference DEM or a comparison with another DEM (MMASTER or other) in order to get dDEMs (the actual aim of the MMASTER method). Absolute accuracy is also not guaranteed as navigation data are imperfect; it is often off by up to 50 m in XYZ (a value also reported in [
9]). Thus, coregistration is necessary for any application using the DEMs as a reference surface.
Because of the way the corrections are fitted, the fit is best when the whole scene can provide data, which is not the case if large parts of the scene are covered by water or clouds, or are saturated or else result in bad correlation. In these cases, the correction fit might be of lower quality and even largely wrong over the areas where no or few data are available, leading to unrestrained behavior in the polynomial fit. However, this is in practice not of much concern, as bad corrections over areas that would not produce data anyways are less of a problem. Furthermore, in our testing, even scenes with up to 70% data gaps were still processed successfully, especially if the gaps are located in a single part of the scene (the 2016 New Zealand scene from
Section 3.2 is half ocean on the east side and has some important cloud cover over land), but the success rate may vary for other applications and scene conditions.
The main reason behind the polynomial fit of the measured signals is that the corrections are different from scene to scene. However, we noticed some consistencies. The main one we find is a latitude dependency on the cross-track elevation bias (for both the DMO product and the MMASTER product before comparison with another DEM), with the edge of the images presenting a varying pattern: at high latitudes, the part of the DEM related to the left edge of the images bends down (as seen in
Figure 1A,
Figure 9A,B and
Figure 10A), while, close to the Equator, the right edge bends up. Close to 45° N/S, this pattern is absent. We have no clear idea about the underlying reason for this latitude-dependent scene deformation (it could, for example, be due to atmospheric refraction, orbit determination or some other process), but once understood, MMASTER could be improved accordingly.
5. Conclusions
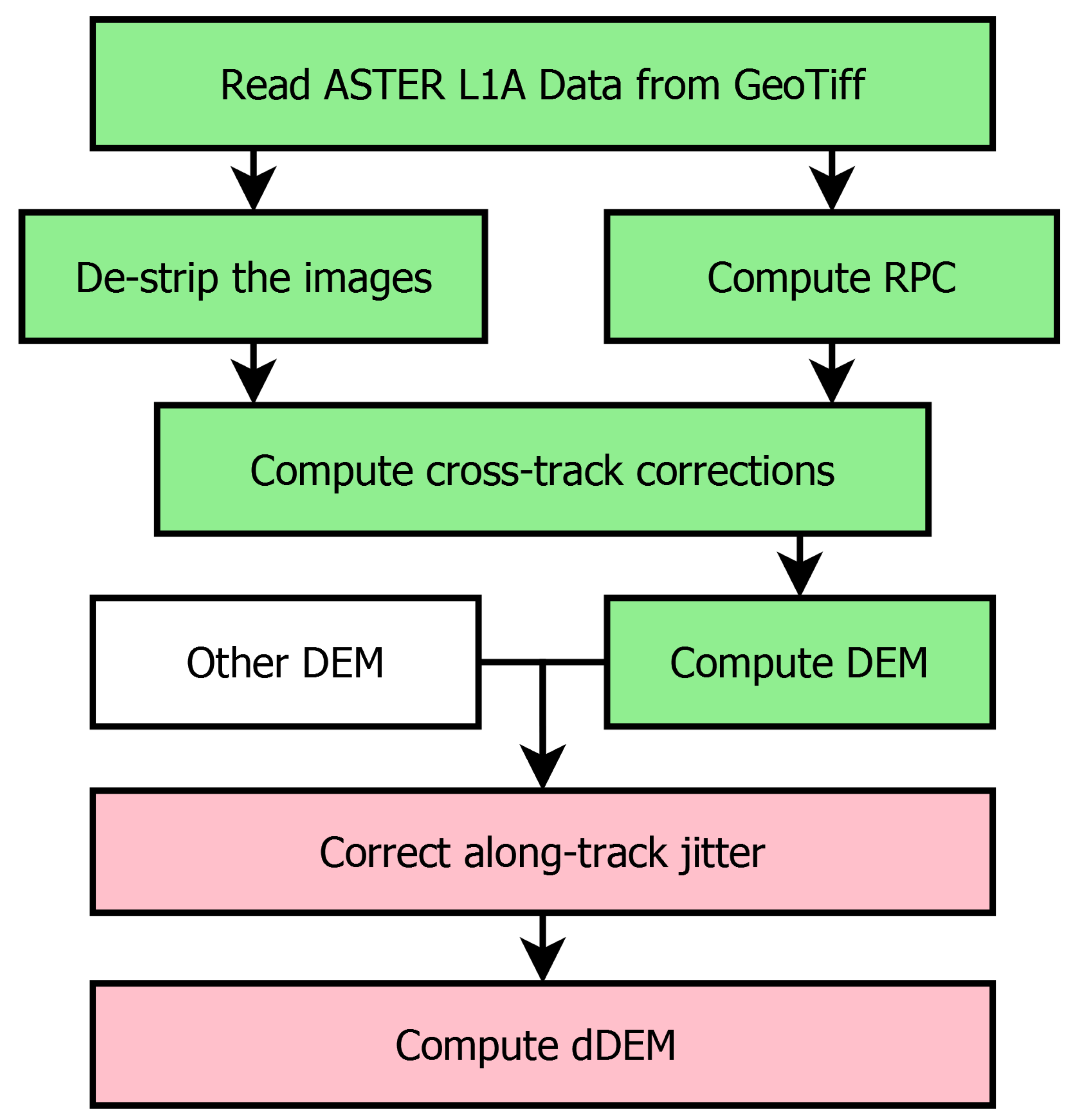
The ASTER data archive is a goldmine for the analysis of changes on the surface of the Earth since 2000, including elevation change. However, previously available DEM products from ASTER, e.g., the AST14DMO product or personally-generated DEMs from commercial software (e.g., PCI Geomatica, ENVI, etc.), were not high enough quality for a number of applications. We have therefore developed the open source processing chain MMASTER that takes ASTER L1A scenes in GeoTiff format, extracts the images from the VNIR Bands 3N and 3B, as well as the necessary meta-data and computes a DEM and orthoimage of the scene. From this baseline, we can conduct fine analysis of the raw data and apply corrections to it.
The data produced by the MMASTER system are a significant improvement on the AST14DMO product with the precision increasing from 20 m to 5 m. This opens up a new realm of potential applications in a wide variety of fields as demonstrated in the second part of this paper: glacier volume change can be estimated with a higher confidence; the effects of a volcanic eruption on its local environment can be better quantified; and the former tree height of a clear-cut forest can be well estimated. The increase in quality can also help estimating radar penetration in vegetation (as seen in
Section 3.1), but also on snow and ice when compared to radar-interferometric DEMs, a still ill-resolved issue. In addition, the quality of the orthoimages that can be computed is improved, opening up the opportunity for better assessment of horizontal shift in terrain, as demonstrated in the New Zealand earthquake example in
Section 3.2.
MMASTER opens a range of new perspectives for the community in view of the large and over 16 year-long global-scale archive of ASTER stereo data, its recent free availability and the fact that the ASTER stereo sensor is still operational and will continue to acquire new data in the foreseeable future. The immediate availability of the processing chain will hopefully put this new data in the hands of experts in a number of fields that we may not even have considered in this paper.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}