
Artificial Compound Eye Systems and Their Application: A Review

 ,
,  , , ,
, , ,  ,
,  , and
, and
Abstract
:1. Introduction
2. Natural Compound Eye
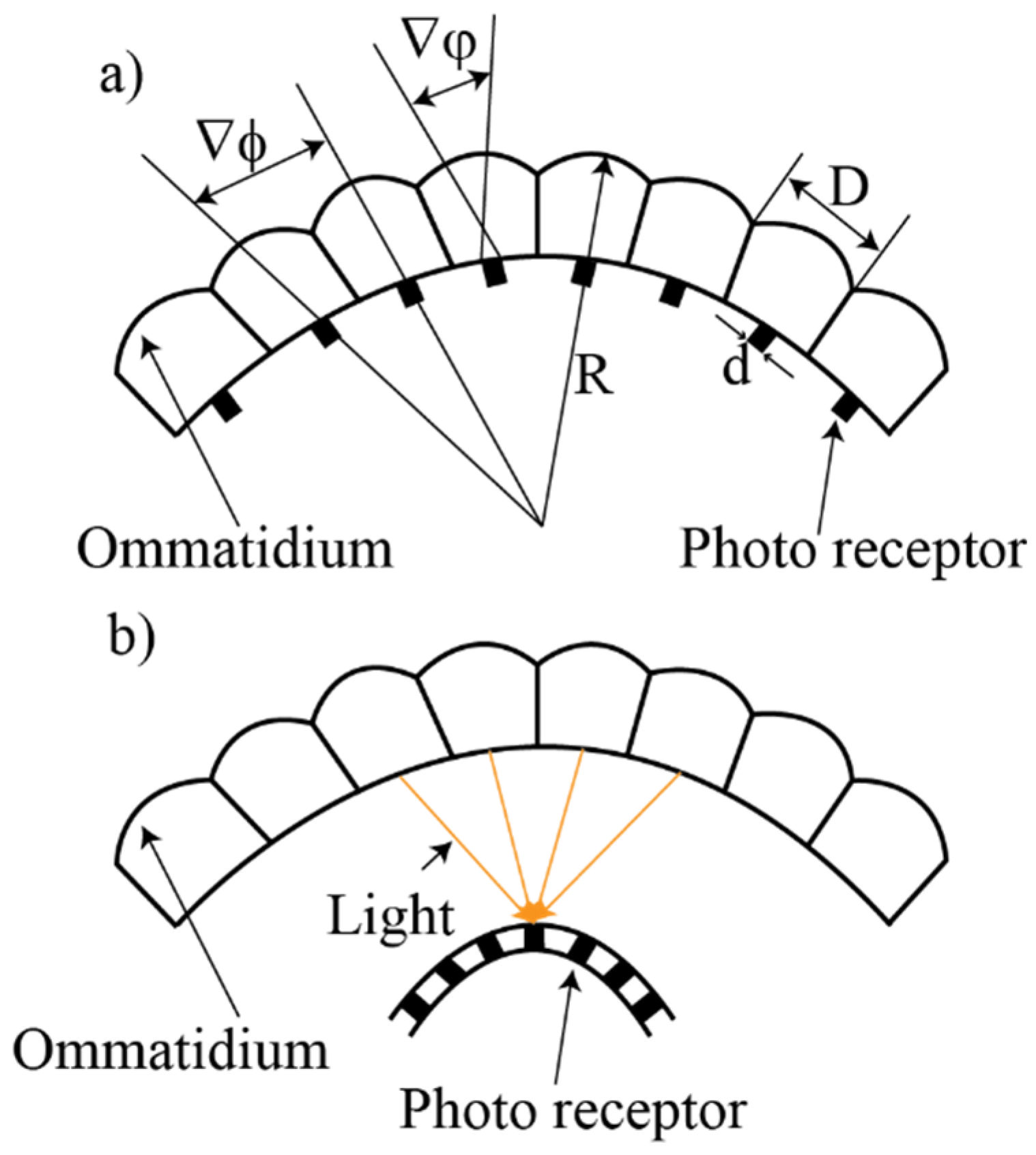
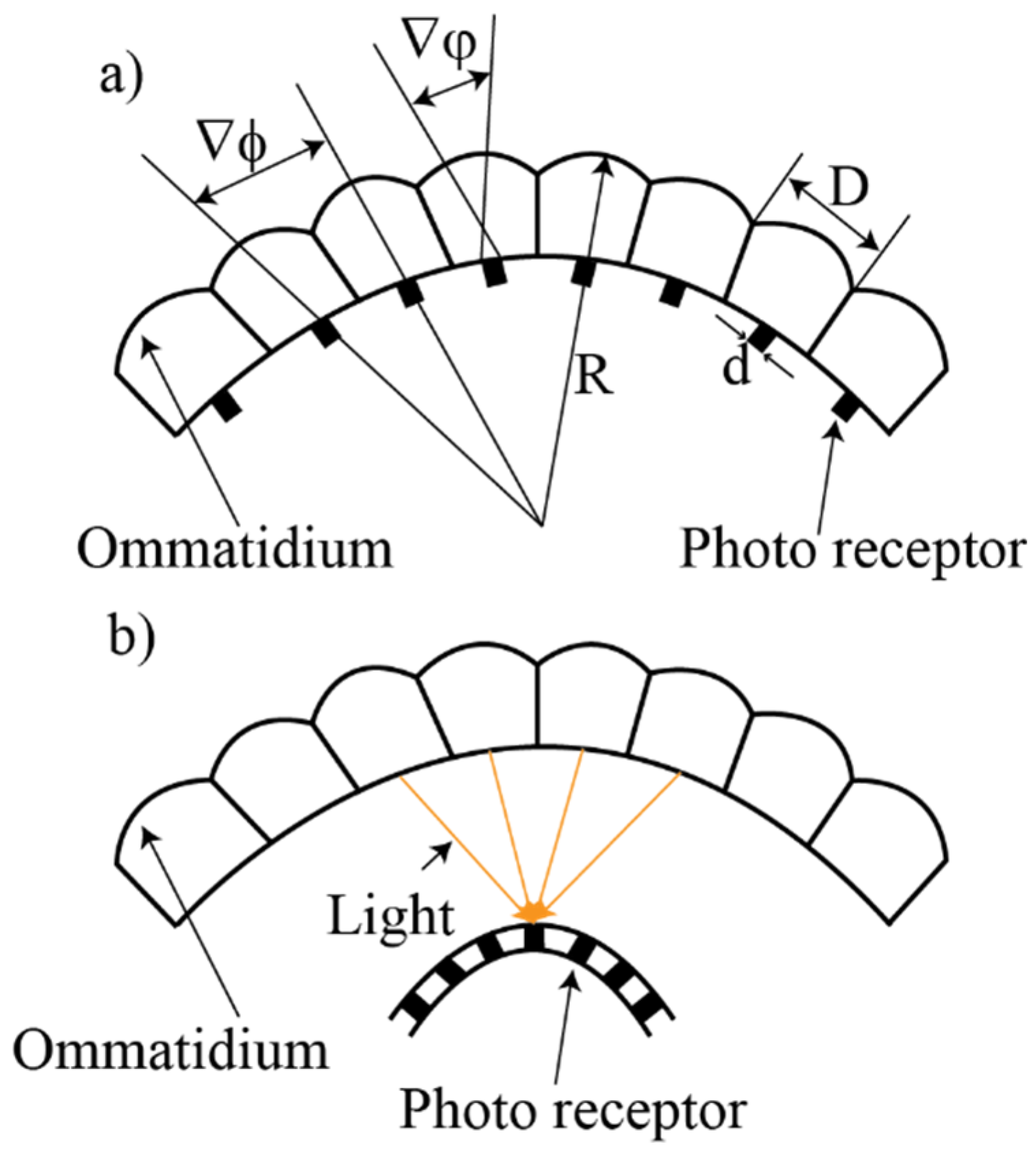
2.1. Apposition Compound Eye
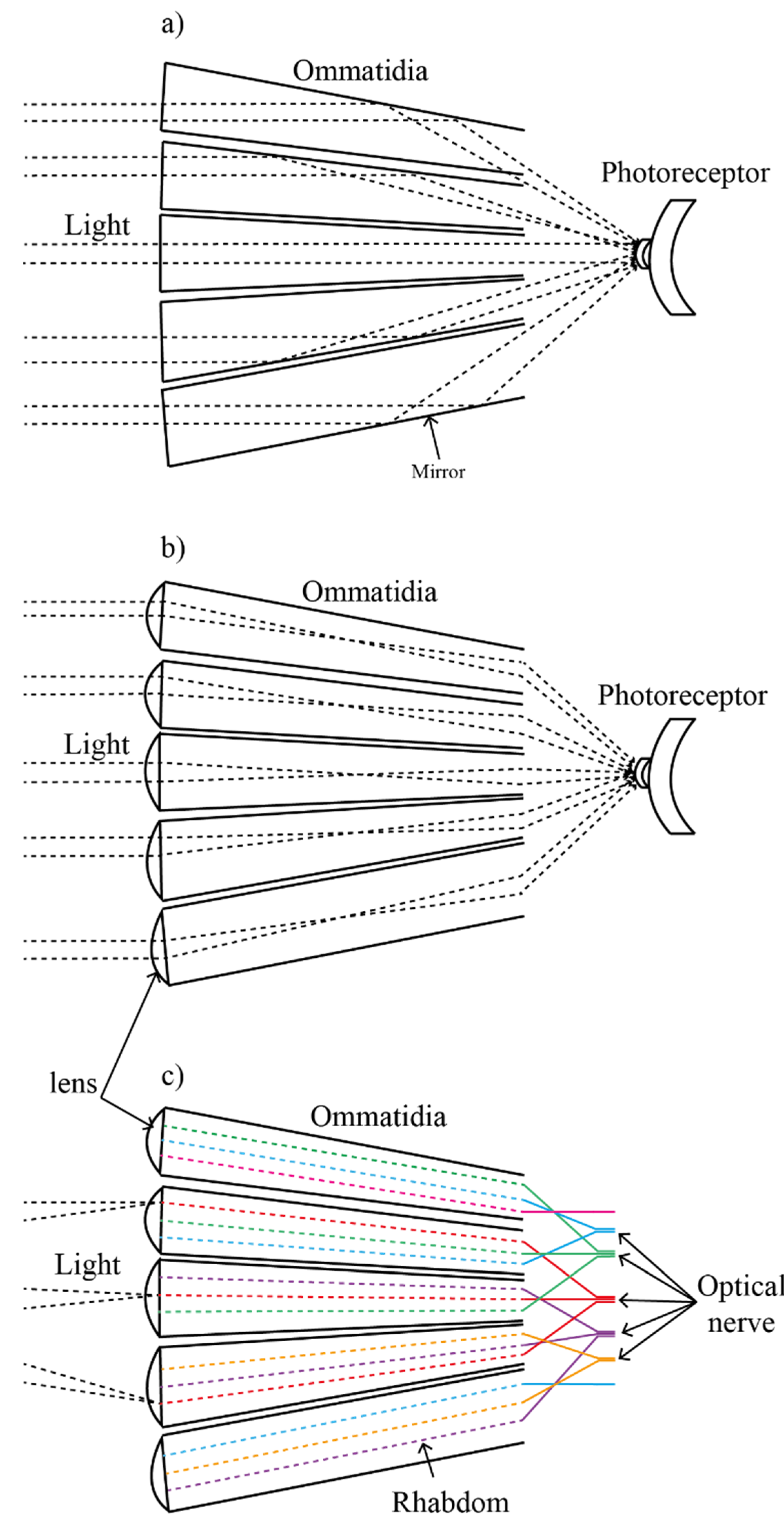
2.2. Superposition Compound Eye
3. Artificial Compound Eye Imaging System Using Microlens Arrays
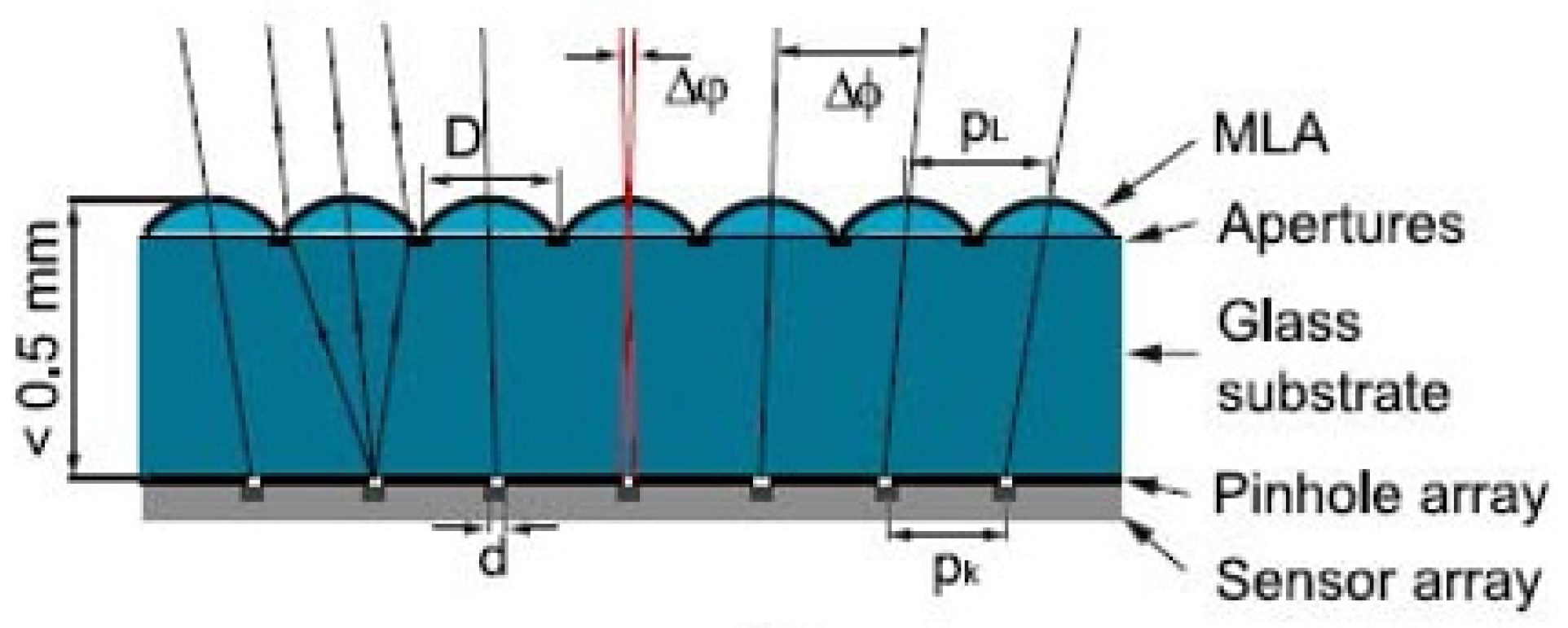
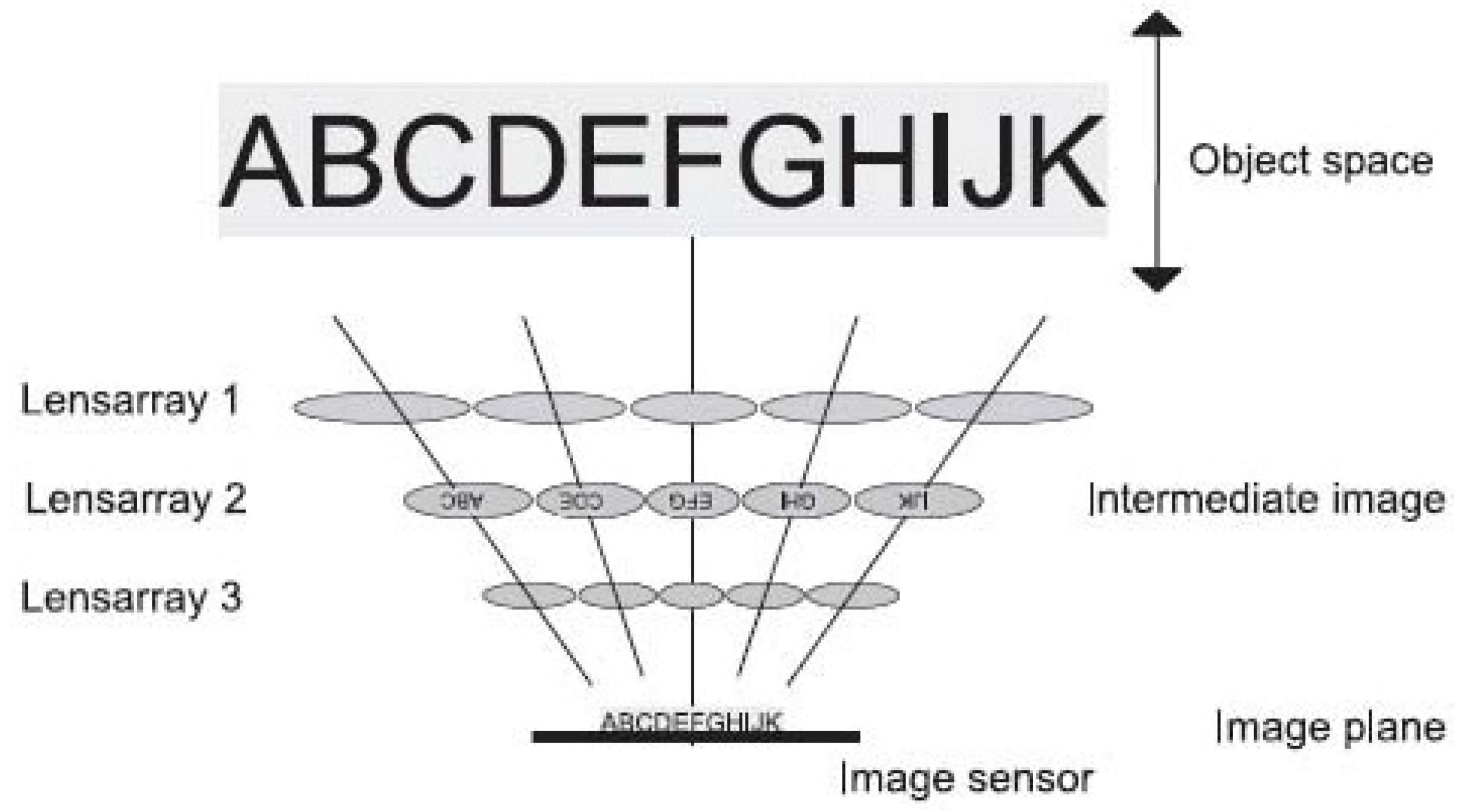
3.1. Planar-Type Artificial Compound Eye
3.2. Curved-Type Artificial Compound Eye
3.2.1. Curved Microlens Array Integrated to a Planar Image Sensor
3.2.2. Curved Microlens Array Integrated to a Curved Image Sensor
4. Artificial Compound Eye Imaging System Using Metasurface-Based Lens
4.1. Artificial Compound Eye Using Plasmonic Metasurface-Based Lenses
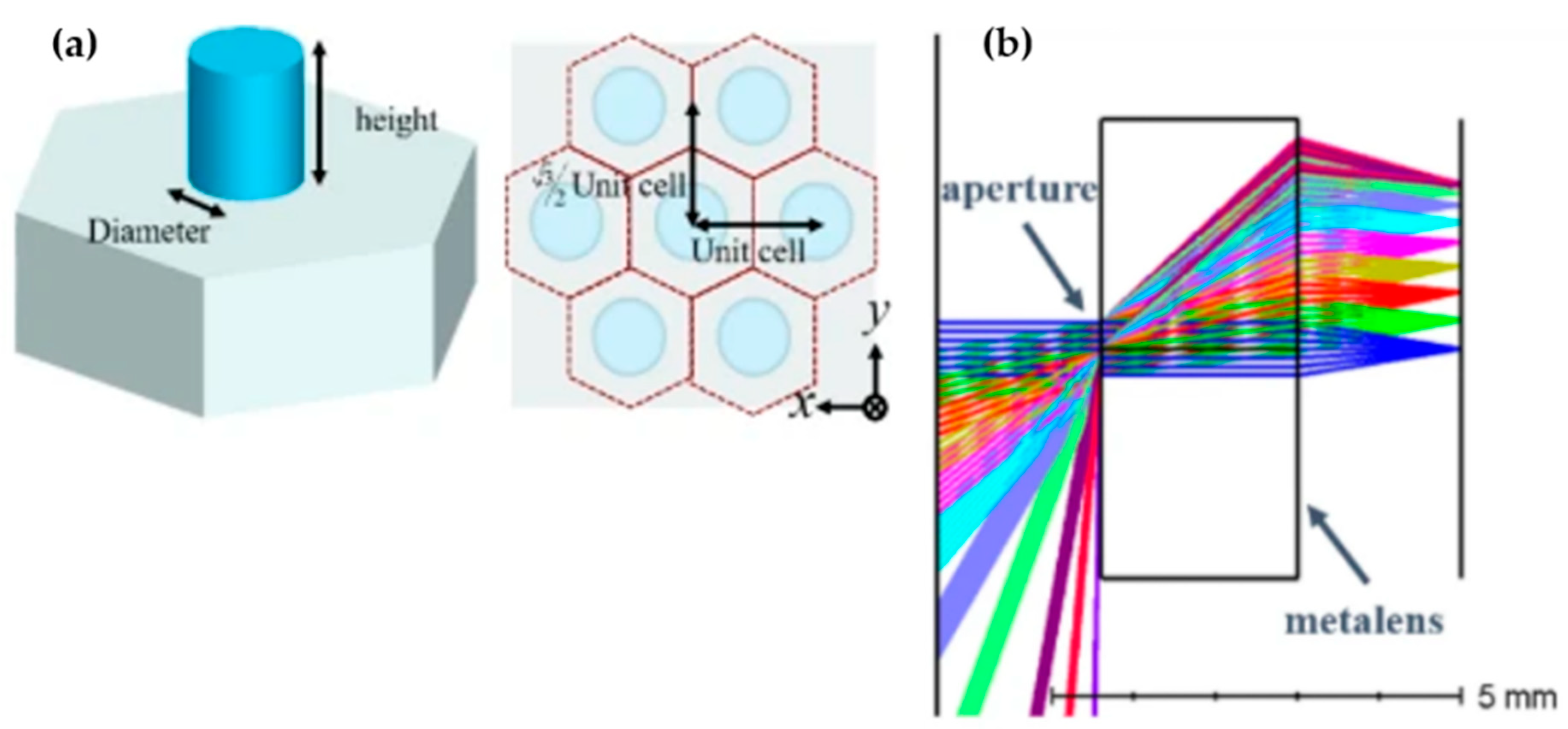
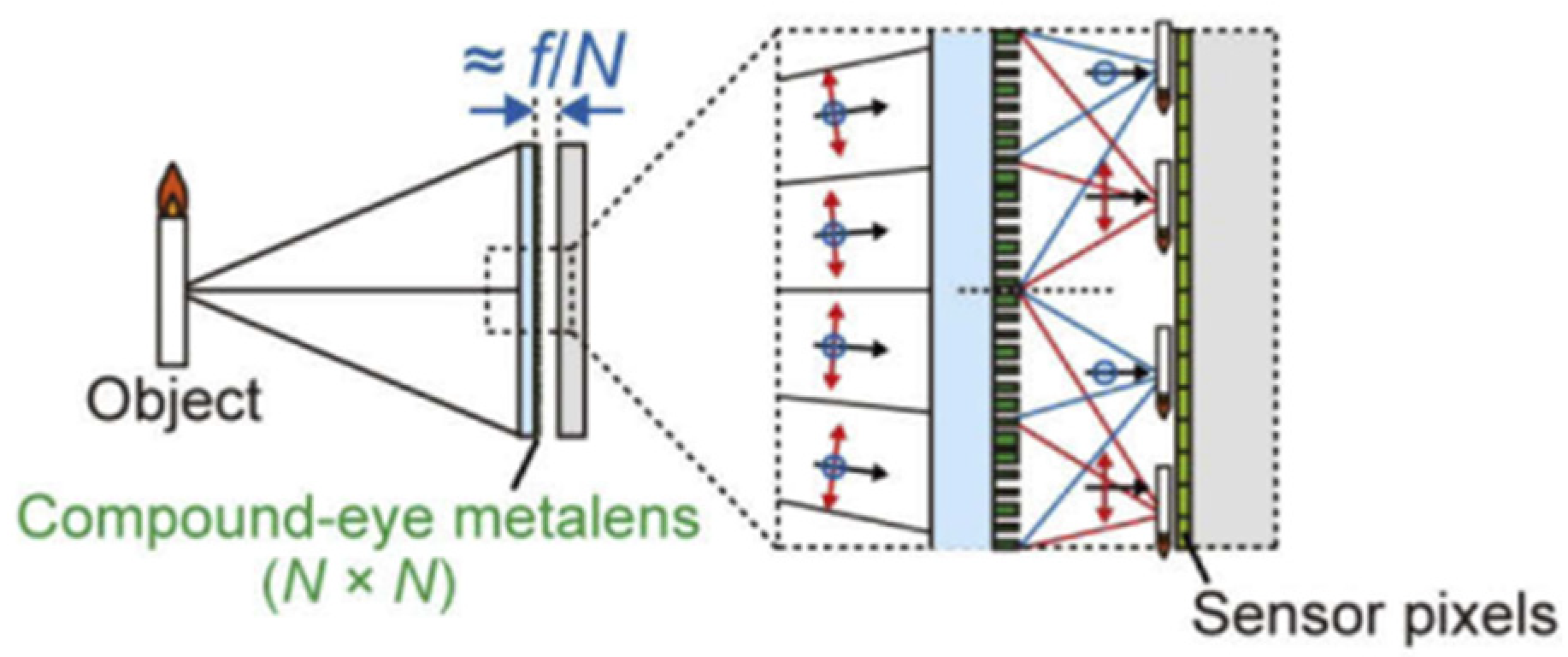
4.2. Artificial Compound Eye Using Dielectric Metasurface-Based Lens
5. Application of Artificial Compound Eye Imaging System
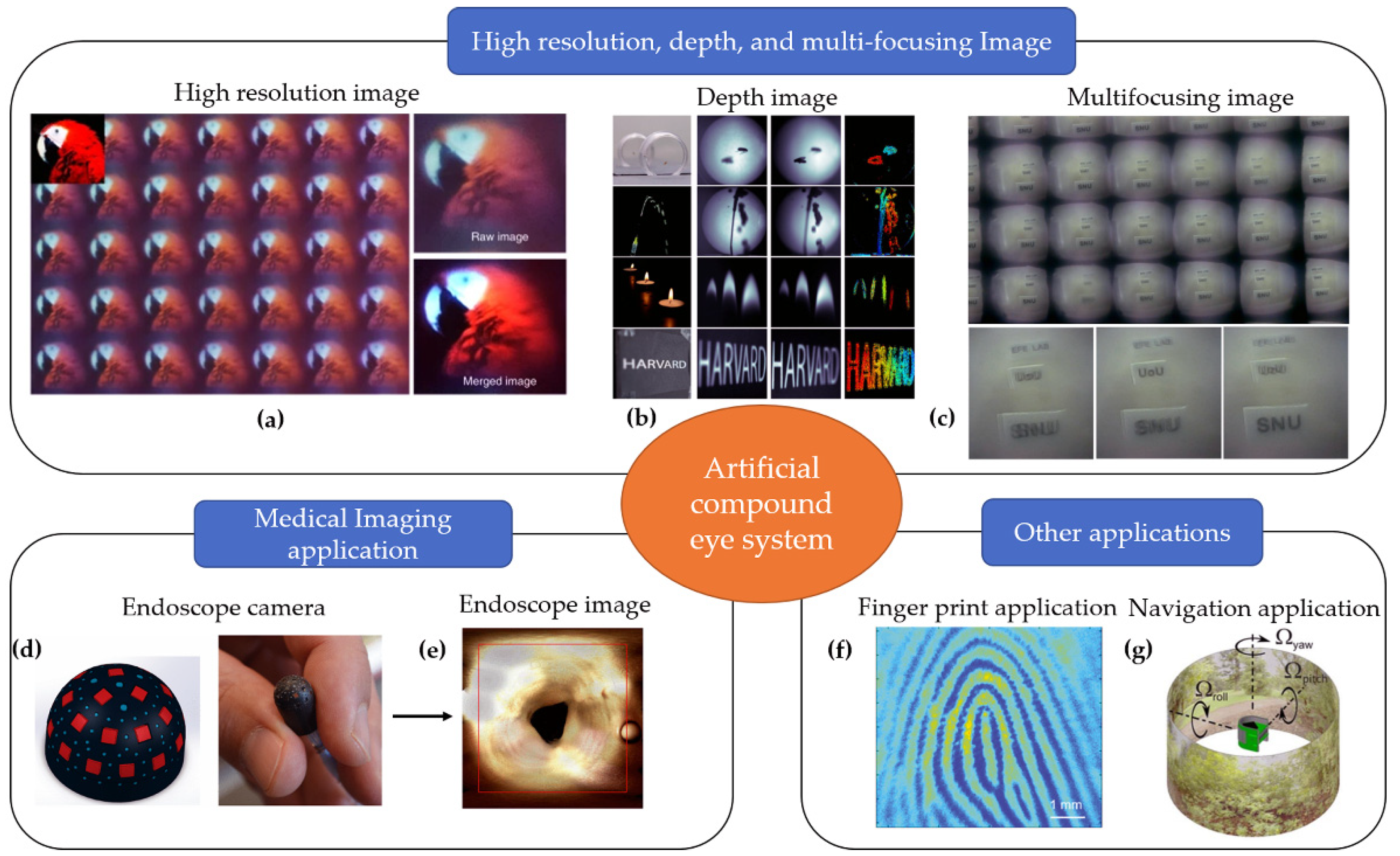
5.1. Imaging with High Resolution, Depth Information, and Multi-Refocusing
5.2. System with a Large FOV for Medical Imaging Application
5.3. Other Applications
6. Conclusions and Outlook
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bar-Cohen, Y. Biomimetics—Using nature to inspire human innovation. Bioinspir. Biomim. 2006, 1, P1–P12. [Google Scholar] [CrossRef]
- Seo, J.-M.; Koo, K.I. Biomimetic Multiaperture Imaging Systems: A Review. Sens. Mater. 2015, 27. [Google Scholar] [CrossRef] [Green Version]
- Lakshminarayanan, V.; Kuppuswamy Parthasarathy, M. Biomimetic optics: Visual systems. J. Mod. Opt. 2016, 1–26. [Google Scholar] [CrossRef]
- Land, M.F.; Nilsson, D.E. Animal Eyes; Oxford University Press: New York, NY, USA, 2012. [Google Scholar]
- Seo, M.; Seo, J.M.; Cho, D.D.; Koo, K. Insect-Mimetic Imaging System Based on a Microlens Array Fabricated by a Patterned-Layer Integrating Soft Lithography Process. Sensors 2018, 18, 2011. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahuja, N.A.; Bose, N.K. Design of Large Field-of-View High-Resolution Miniaturized Imaging System. EURASIP J. Adv. Signal Process. 2007, 2007. [Google Scholar] [CrossRef] [Green Version]
- OmniVision Technologies, Inc. OmniVision Announces Guinness World Record for Smallest Image Sensor and New Miniature Camera Module for Disposable Medical Applications. Available online: https://www.ovt.com/news-events/product-releases/omnivision-announces-guinness-world-record-for-smallest-image-sensor-and-new-miniature-camera-module-for-disposable-medical-applications (accessed on 24 May 2021).
- Wu, D.; Wang, J.-N.; Niu, L.-G.; Zhang, X.L.; Wu, S.Z.; Chen, Q.-D.; Lee, L.P.; Sun, H.B. Bioinspired Fabrication of High-Quality 3D Artificial Compound Eyes by Voxel-Modulation Femtosecond Laser Writing for Distortion-Free Wide-Field-of-View Imaging. Adv. Opt. Mater. 2014, 2, 751–758. [Google Scholar] [CrossRef]
- Jeong, K.H.; Kim, J.; Lee, L.P. Biologically Inspired Artificial Compound Eyes. Science 2006, 312. [Google Scholar] [CrossRef] [Green Version]
- Micusik, B.; Pajdla, T. Structure from motion with wide Circular Field of View Cameras. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28. [Google Scholar] [CrossRef]
- Nayar, S.K. Catadioptic Omnidirectional Camera. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997. [Google Scholar]
- Varela, F.G. The vertebrate and the insect compound eye in evolutionary perspective. Vis. Res. 1971, 11. [Google Scholar] [CrossRef]
- Borst, A.; Plett, J. Seeing the world through an insect eye. Nature 2013, 497, 47. [Google Scholar] [CrossRef]
- Land, M.F. The optics of animal eyes. Contemp. Phys. 1988, 29, 435–455. [Google Scholar] [CrossRef]
- Völkel, R.; Eisner, M.; Weible, K.J. Miniaturized imaging systems. Microelectron. Eng. 2003, 67–68, 461–472. [Google Scholar] [CrossRef]
- Qu, P.; Chen, F.; Liu, H.; Yang, Q.; Lu, J.; Si, J.; Wang, Y.; Hou, X. A simple route to fabricate artificial compound eye structure. Opt. Express 2012, 20. [Google Scholar] [CrossRef] [Green Version]
- Fallah, H.R.; Karimzadeh, A. MTF of compound eye. Opt. Express 2010, 18. [Google Scholar] [CrossRef] [PubMed]
- Greiner, B.; Ribi, W.A.; Wcislo, W.T.; Warrant, E.J. Neural organisation in the first optic ganglion of the nocturnal bee Megalopta genalis. Cell Tissue Res. 2004, 318, 429–437. [Google Scholar] [CrossRef] [PubMed]
- Frederiksen, R.; Warrant, E.J. Visual sensitivity in the crepuscular owl butterfly Caligo memnon and the diurnal blue morpho Morpho peleides: A clue to explain the evolution of nocturnal apposition eyes? J. Exp. Biol. 2008, 211, 844–851. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sanders, J.S.; Halford, C.E. Design and analysis of apposition compound eye optical sensors. Opt. Eng. 1995, 34. [Google Scholar] [CrossRef]
- Borst, A. Drosophila’s view on insect vision. Curr. Biol. 2009, 19, R36–R47. [Google Scholar] [CrossRef] [Green Version]
- Land, M.F. Compound eye old and new optical mechanisms. Nature 1980, 287. [Google Scholar] [CrossRef] [PubMed]
- Zeil, J. Sexual dimorphism in the visual system of flies: The compound eyes and neural superposition in bibionidae (Diptera). J. Comp. Physiol. 1983, 150, 379–393. [Google Scholar] [CrossRef]
- Ball, E.E.; Kao, L.C.; Stone, R.C.; Land, M.F. Eye structure and optics in the pelagic shrimp Acetes sibogae (Decapoda, Natantia, Sergestidae) in relation to light-dark adaptation and natural history. Philos. Trans. R. Soc. Lond. B Biol. Sci. 1986, 313, 251–270. [Google Scholar] [CrossRef]
- Stollberg, K.; Bruckner, A.; Duparre, J.; Dannberg, P.; Brauer, A.; Tunnermann, A. The Gabor superlens as an alternative wafer-level camera approach inspired by superposition compound eyes of nocturnal insects. Opt. Express 2009, 17, 15747–15759. [Google Scholar] [CrossRef]
- Tanida, J.; Kumagai, T.; Yamada, K.; Miyatake, S.; Ishida, K.; Morimoto, T.; Kondou, N.; Miyazaki, D.; Ichioka, Y. Thin observation module by bound optics (TOMBO): Concept and experimental verification. Appl. Opt. 2001, 40. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tanida, J.; Kitamura, Y.; Yamada, K.; Miyatake, S.; Miyamoto, M.; Morimoto, T.; Masaki, Y.; Kondou, N.; Miyazaki, D.; Ichioka, Y. Compact image capturing system based on compound imaging and digital reconstruction. In Proceedings of the Micro- and Nano-Optics for Optical Interconnection and Information Processing, San Diego, CA, USA, 29–31 July 2001. [Google Scholar]
- Tanida, J.; Shogenji, R.; Kitamura, Y.; Yamada, K.; Miyamoto, M.; Miyatake, S. Color imaging with an integrated compound imaging system. Opt. Express 2003, 11. [Google Scholar] [CrossRef]
- Awwal, A.A.S.; Kagawa, K.; Iftekharuddin, K.M.; Fukata, N.; Tanida, J.; Burkhart, S.C. High-speed multispectral three-dimensional imaging with a compound-eye camera TOMBO. In Proceedings of the Optics and Photonics for Information Processing IV, San Diego, CA, USA, 4–5 August 2010. [Google Scholar]
- Duparré, J.; Dannberg, P.; Schreiber, P.; Bräuer, A.; Tünnermann, A. Artificial apposition compound eye fabricated by micro optics technology. Appl. Opt. 2004, 43. [Google Scholar] [CrossRef] [PubMed]
- Brückner, A.; Duparré, J.; Dannberg, P.; Bräuer, A.; Tünnermann, A. Artificial neural superposition eye. Opt. Express 2007, 15. [Google Scholar] [CrossRef] [PubMed]
- Duparré, J.; Dannberg, P.; Schreiber, P.; Bräuer, A.; Tünnermann, A. Thin compound eye camera. Appl. Opt. 2005, 44. [Google Scholar] [CrossRef] [PubMed]
- Duparré, J.; Schreiber, P.; Matthes, A.; Pshenay-Severin, E.; Bräuer, A.; Tünnermann, A.; Völkel, R.; Eisner, M.; Scharf, T. Microoptical telescope compound eye. Opt. Express 2005, 13. [Google Scholar] [CrossRef]
- Duparré, J.; Wippermann, F.; Dannberg, P.; Reimann, A. Chirped arrays of refractive ellipsoidal microlens for aberration correction under oblique incidence. Opt. Express 2005, 13. [Google Scholar] [CrossRef]
- Thienpont, H.; Druart, G.; Van Daele, P.; Guérineau, N.; Haïdar, R.; Mohr, J.; Taghizadeh, M.R.; Lambert, E.; Tauvy, M.; Thétas, S.; et al. MULTICAM: A miniature cryogenic camera for infrared detection. In Proceedings of the Micro-Optics 2008, Strasbourg, France, 14 May 2008. [Google Scholar]
- Brückner, A.; Duparré, J.; Leitel, R.; Dannberg, P.; Bräuer, A.; Tünnermann, A. Thin wafer-level camera lenses inspired by insect compound eyes. Opt. Express 2010. [Google Scholar] [CrossRef] [PubMed]
- Thienpont, H.; Brückner, A.; Van Daele, P.; Duparré, J.; Dannberg, P.; Mohr, J.; Zappe, H.; Leitel, R.; Bräuer, A. Driving micro-optical imaging systems towards miniature camera applications. In Proceedings of the Micro-Optics 2010, Brussels, Belgium, 12 May 2010. [Google Scholar]
- Brückner, A. Multi-aperture optics for wafer-level cameras. J. Micro/Nanolithography MEMS MOEMS 2011, 10. [Google Scholar] [CrossRef]
- Meyer, J.; Brückner, A.; Leitel, R.; Dannberg, P.; Bräuer, A.; Tünnermann, A. Optical Cluster Eye fabricated on wafer level. Opt. Express 2011, 19. [Google Scholar] [CrossRef]
- Kim, K.; Jang, K.W.; Ryu, J.K.; Jeong, K.H. Biologically inspired ultrathin arrayed camera for high-contrast and high-resolution imaging. Light Sci. Appl. 2020, 9, 28. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Chen, F.; Yang, Q.; Qu, P.; He, S.; Wang, X.; Si, J.; Hou, X. Fabrication of bioinspired omnidirectional and gapless microlens array for wide field-of-view detections. Appl. Phys. Lett. 2012, 100. [Google Scholar] [CrossRef]
- Chen, F.; Liu, H.; Yang, Q.; Wang, X.; Hou, C.; Bian, H.; Liang, W.; Si, J.; Hou, X. Maskless fabrication of concave microlens arrays on silica glasses by a femtosecond-laser-enhanced local wet etching method. Opt. Express 2010, 18. [Google Scholar] [CrossRef] [PubMed]
- Bian, H.; Wei, Y.; Yang, Q.; Chen, F.; Zhang, F.; Du, G.; Yong, J.; Hou, X. Direct fabrication of compound-eye microlens array on curved surfaces by a facile femtosecond laser enhanced wet etching process. Appl. Phys. Lett. 2016, 109. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Li, M.; Shen, L.; Qiu, J.; Zhou, Y. Flexible fabrication of biomimetic compound eye array via two-step thermal reflow of simply pre-modeled hierarchic microstructures. Opt. Commun. 2017, 393, 213–218. [Google Scholar] [CrossRef]
- Wang, M.; Yu, W.; Wang, T.; Han, X.; Gu, E.; Li, X. A novel thermal reflow method for the fabrication of microlenses with an ultrahigh focal number. RSC Adv. 2015, 5, 35311–35316. [Google Scholar] [CrossRef]
- Zhou, P.; Yu, H.; Zhong, Y.; Zou, W.; Wang, Z.; Liu, L. Fabrication of Waterproof Artificial Compound Eyes with Variable Field of View Based on the Bioinspiration from Natural Hierarchical Micro–Nanostructures. Nano-Micro Lett. 2020, 12. [Google Scholar] [CrossRef]
- Deng, Z.; Chen, F.; Yang, Q.; Bian, H.; Du, G.; Yong, J.; Shan, C.; Hou, X. Dragonfly-Eye-Inspired Artificial Compound Eyes with Sophisticated Imaging. Adv. Funct. Mater. 2016, 26, 1995–2001. [Google Scholar] [CrossRef]
- Li, J.; Wang, W.; Mei, X.; Hou, D.; Pan, A.; Liu, B.; Cui, J. Fabrication of Artificial Compound Eye with Controllable Field of View and Improved Imaging. ACS Appl. Mater. Interfaces 2020, 12, 8870–8878. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, C.; Liu, C.; Yu, X.; Xu, H.; Wang, T.; Qiao, Y.; Yu, W. Fabrication and characterization of a polymeric curved compound eye. J. Micromech. Microeng. 2019, 29. [Google Scholar] [CrossRef]
- Cheng, Y.; Cao, J.; Zhang, Y.; Hao, Q. Review of state-of-the-art artificial compound eye imaging systems. Bioinspiration Biomim. 2019, 14. [Google Scholar] [CrossRef]
- Keum, D.; Jang, K.W.; Jeon, D.S.; Hwang, C.S.H.; Buschbeck, E.K.; Kim, M.H.; Jeong, K.H. Xenos peckii vision inspires an ultrathin digital camera. Light Sci. Appl. 2018, 7, 80. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lian, G.; Liu, Y.; Tao, K.; Xing, H.; Huang, R.; Chi, M.; Zhou, W.; Wu, Y. Fabrication and Characterization of Curved Compound Eyes Based on Multifocal Microlenses. Micromachines 2020, 11, 854. [Google Scholar] [CrossRef] [PubMed]
- Liang, W.-L.; Pan, J.-G.; Su, G.-D.J. One-lens camera using a biologically based artificial compound eye with multiple focal lengths. Optica 2019, 6. [Google Scholar] [CrossRef]
- Han, Q.; Zhai, Y.; Niu, J.; Liu, J.; Yang, B. A multi-focusing curved artificial compound eye compatible with planar image sensors. Microsyst. Technol. 2020. [Google Scholar] [CrossRef]
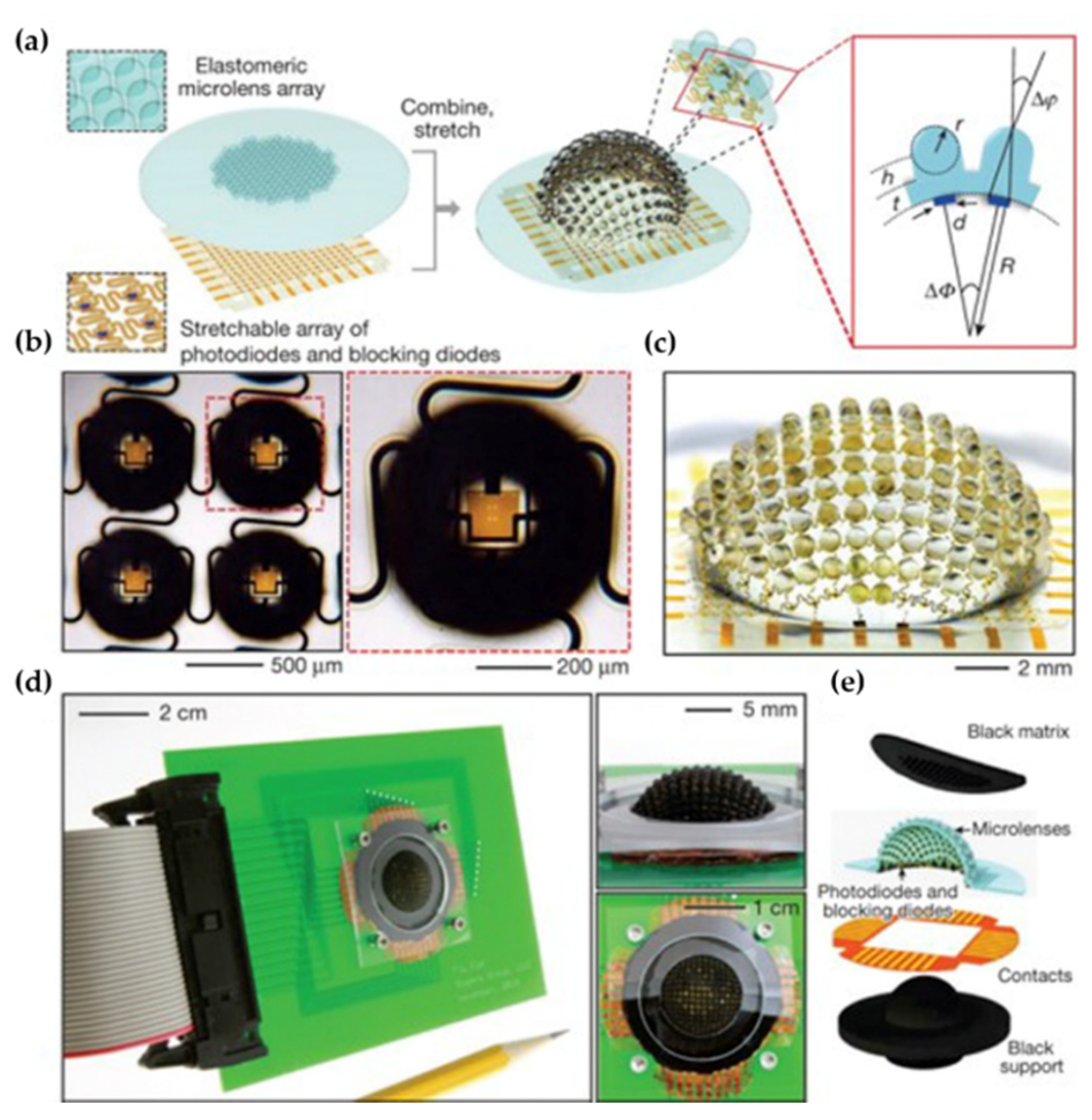
- Song, Y.M.; Xie, Y.; Malyarchuk, V.; Xiao, J.; Jung, I.; Choi, K.J.; Liu, Z.; Park, H.; Lu, C.; Kim, R.H.; et al. Digital cameras with designs inspired by the arthropod eye. Nature 2013, 497, 95–99. [Google Scholar] [CrossRef]
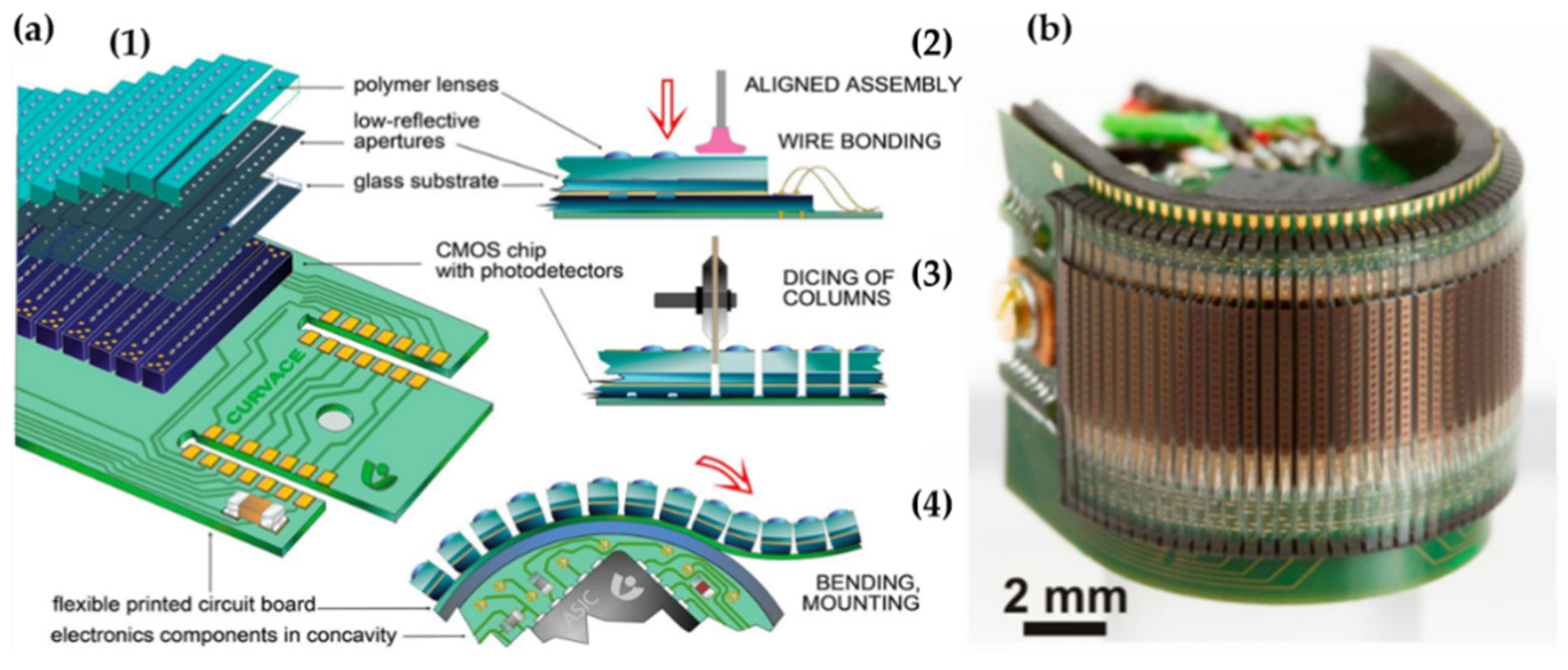
- Floreano, D.; Pericet-Camara, R.; Viollet, S.; Ruffier, F.; Bruckner, A.; Leitel, R.; Buss, W.; Menouni, M.; Expert, F.; Juston, R.; et al. Miniature curved artificial compound eyes. Proc. Natl. Acad. Sci. USA 2013, 110, 9267–9272. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Shaw, B.; Dickey, M.D.; Genzer, J. Sequential self-folding of polymer sheets. Sci. Adv. 2017, 3, e1602417. [Google Scholar] [CrossRef] [Green Version]
- An, B.W.; Kim, K.; Kim, M.; Kim, S.-Y.; Hur, S.-H.; Park, J.-U. Direct Printing of Reduced Graphene Oxide on Planar or Highly Curved Surfaces with High Resolutions Using Electrohydrodynamics. Small 2015, 11, 2263–2268. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Chiang, S.W.; Yang, C.; Lin, Z.; Liu, J.; Moon, K.-S.; Kang, F.; Li, B.; Wong, C.P. Conformal Pad-Printing Electrically Conductive Composites onto Thermoplastic Hemispheres: Toward Sustainable Fabrication of 3-Cents Volumetric Electrically Small Antennas. PLoS ONE 2015, 10, e0136939. [Google Scholar] [CrossRef] [PubMed]
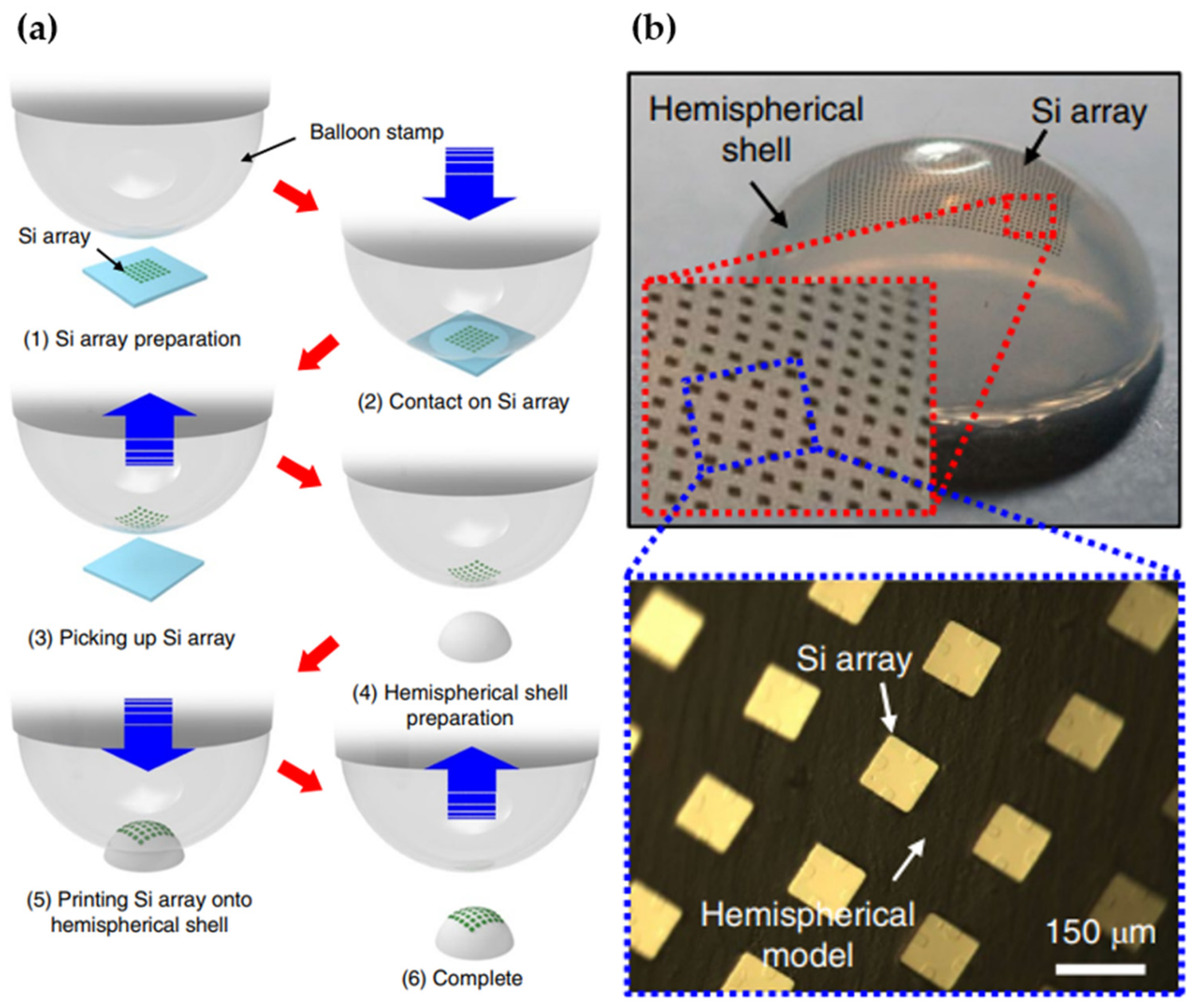
- Sim, K.; Chen, S.; Li, Z.; Rao, Z.; Liu, J.; Lu, Y.; Jang, S.; Ershad, F.; Chen, J.; Xiao, J.; et al. Three-dimensional curvy electronics created using conformal additive stamp printing. Nat. Electron. 2019, 2, 471–479. [Google Scholar] [CrossRef]
- Li, Z.; Xiao, J. Mechanics and optics of stretchable elastomeric microlens array for artificial compound eye camera. J. Appl. Phys. 2015, 117, 014904. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y.; Xiao, J. Mechanics of bioinspired imaging systems. Theor. Appl. Mech. Lett. 2016, 6, 11–20. [Google Scholar] [CrossRef] [Green Version]
- Yuan, W.; Li, L.-H.; Lee, W.-B.; Chan, C.-Y. Fabrication of Microlens Array and Its Application: A Review. Chin. J. Mech. Eng. 2018, 31. [Google Scholar] [CrossRef] [Green Version]
- Fan, Z.B.; Qiu, H.Y.; Zhang, H.L.; Pang, X.N.; Zhou, L.D.; Liu, L.; Ren, H.; Wang, Q.H.; Dong, J.W. A broadband achromatic metalens array for integral imaging in the visible. Light Sci. Appl. 2019, 8. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Wong, C.L.; Zeng, S.; Bi, R.; Tai, K.; Dholakia, K.; Olivo, M. Metasurfaces for biomedical applications: Imaging and sensing from a nanophotonics perspective. Nanophotonics 2020, 10, 259–293. [Google Scholar] [CrossRef]
- Li, B.; Piyawattanametha, W.; Qiu, Z. Metalens-Based Miniaturized Optical Systems. Micromachines 2019, 10, 310. [Google Scholar] [CrossRef] [Green Version]
- Moon, S.W.; Kim, Y.; Yoon, G.; Rho, J. Recent Progress on Ultrathin Metalenses for Flat Optics. iScience 2020, 23, 101877. [Google Scholar] [CrossRef]
- Novotny, L.; van Hulst, N. Antennas for light. Nat. Photonics 2011, 5, 83–90. [Google Scholar] [CrossRef]
- Salmanogli, A.; Gecim, H.S.; Piskin, E. Plasmonic System as a Compound Eye: Image Point-Spread Function Enhancing by Entanglement. IEEE Sens. J. 2018, 18, 5723–5731. [Google Scholar] [CrossRef]
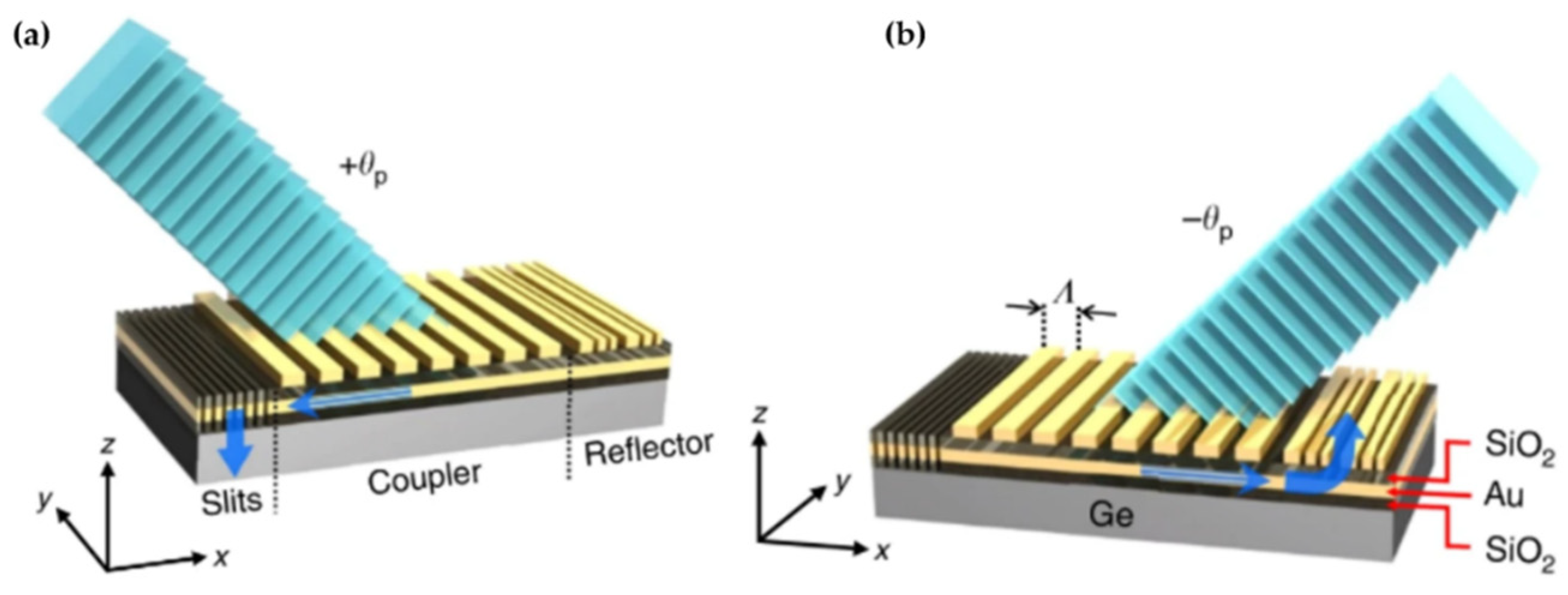
- Kogos, L.C.; Li, Y.; Liu, J.; Li, Y.; Tian, L.; Paiella, R. Plasmonic ommatidia for lensless compound-eye vision. Nat. Commun. 2020, 11. [Google Scholar] [CrossRef] [PubMed]
- Fan, C.Y.; Lin, C.P.; Su, G.J. Ultrawide-angle and high-efficiency metalens in hexagonal arrangement. Sci. Rep. 2020, 10, 15677. [Google Scholar] [CrossRef] [PubMed]
- Miyata, M.; Nakajima, M.; Hashimoto, T. Compound-eye metasurface optics enabling a high-sensitivity, ultra-thin polarization camera. Opt. Express 2020, 28, 9996–10014. [Google Scholar] [CrossRef]
- Guo, Q.; Shi, Z.; Huang, Y.W.; Alexander, E.; Qiu, C.W.; Capasso, F.; Zickler, T. Compact single-shot metalens depth sensors inspired by eyes of jumping spiders. Proc. Natl. Acad. Sci. USA 2019, 116, 22959–22965. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cogal, O.; Leblebici, Y. An Insect Eye Inspired Miniaturized Multi-Camera System for Endoscopic Imaging. IEEE Trans. Biomed. Circuits Syst. 2017, 11, 212–224. [Google Scholar] [CrossRef] [PubMed]
- Hu, T.; Zhong, Q.; Li, N.; Dong, Y.; Xu, Z.; Fu, Y.H.; Li, D.; Bliznetsov, V.; Zhou, Y.; Lai, K.H.; et al. CMOS-compatible a-Si metalenses on a 12-inch glass wafer for fingerprint imaging. Nanophotonics 2020, 9, 823–830. [Google Scholar] [CrossRef] [Green Version]
- Thienpont, H.; Mohr, J.; Zappe, H.; Nakajima, H.; Leitel, R.; Brückner, A.; Buß, W.; Viollet, S.; Pericet-Camara, R.; Mallot, H.; et al. Curved artificial compound-eyes for autonomous navigation. In Proceedings of the Micro-Optics 2014, Brussels, Belgium, 2 May 2014. [Google Scholar]
- Yamada, K.; Mitsui, H.; Asano, T.; Tanida, J.; Takahashi, H. Development of Ultra thin three dimentional image capturing system. In Proceedings Volume 6056, Three-Dimensional Image Capture and Applications VII, Proceedings of the Electronic Imaging 2006, San Jose, CA, USA, 27 January 2006; SPIE: Bellingham, WA, USA, 2006. [Google Scholar]
- Horisaki, R.; Irie, S.; Ogura, Y.; Tanida, J. Three Dimensional Information Acquisition Using a Compound Imaging system. Opt. Rev. 2007, 14. [Google Scholar] [CrossRef]
- Lee, W.-B.; Lee, H.-N. Depth-estimation-enabled compound eyes. Opt. Commun. 2018, 412, 178–185. [Google Scholar] [CrossRef]
- Lai, X.C.; Meng, L.J. Artificial Compound-Eye Gamma Camera for MRI Compatible SPECT Imaging. In Proceedings of the 2013 IEEE Nuclear Science Symposium and Medical Imaging Conference (2013 NSS/MIC), Seoul, Korea, 27 October 2013. [Google Scholar]
- Yang, T.; Liu, Y.H.; Mu, Q.; Zhu, M.; Pu, D.; Chen, L.; Huang, W. Compact compound-eye imaging module based on the phase diffractive microlens array for biometric fingerprint capturing. Opt. Express 2019, 27, 7513–7522. [Google Scholar] [CrossRef] [PubMed]
- Pericet-Camara, R.; Bahi-Vila, G.; Lecoeur, J.; Floreano, D. Miniature artificial compound eyes for optic-flowbased robotic navigation. In Proceedings of the 2014 13th Workshop on Information Optics (WIO), Neuchatel, Switzerland, 7−11 July 2014. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Human | Bee | Moth | Shrimp Acetes Sibogae | Bibio Marci |
|---|---|---|---|---|---|
| Structure | Single aperture | Apposition compound | Refractive Superposition compound | Reflective Superposition compound | Neural superposition compound |
| Light habitat | Diurnal | Diurnal | Nocturnal | Nocturnal | Diurnal |
| Lens diameter (mm) | 7 | 0.025 | 0.4 | 0.7 | 0.021 |
| Focal length (mm) | 23 | 0.06 | 0.17 | 0.3 | 0.07 |
| Receptor diameter (um) | 2 | 1.5 | 8 | - | - |
| F-number (F/#) | 3.3 | 2.4 | 0.4 | 0.4 | 0.6 |
| Sensitivity () | 0.23 | 0.24 | 218 | 0.327 | 0.2742–1.2611 |
| Acceptance angle () | 0.007 | 1.9 | <13 | 5.6 | 2.0 |
| Interreceptor angle d/f () | 0.005 | - | 3 | - | 2.8 |
| Interommatidial angle () | - | 0.95 | - | 2.8 | 1.6 |
| Resolution (LP/) | 100 | 0.52 | >0.08 | - | - |
| Author | System Name | Optic Component Integration | Focal Length | FOV | Resolution (Pixels) | Imaging Performance |
|---|---|---|---|---|---|---|
| Tanida et al., 2001 [26] | TOMBO | CCD camera | 650 µm | - | 320 × 240 | Low resolution image. |
| Tanida et al., 2003 [28] | TOMBO | CMOS image sensor | 1.3 µm | - | 360 × 360 | Low resolution image with pixel number 180 × 180. |
| Duparre et al., 2004 [30] | APCO | CCD image sensor | 300 µm | 21° | - | Ghost image due to crosstalk between channels. |
| Duparre et al., 2005 [32] | Cley | CCD camera | 2.75 µm | 70° × 10° | 700 × 500 | Low contrast image, a resolution of 3.3 LP/°. |
| Duparre et al., 2005 [34] | Chirped APCO | CMOS image sensor | 145 µm | 64.3° | 60 × 60 | Low resolution image. |
| Bruckner et al., 2007 [33] | Artificial neuro superposition eye | CMOS image sensor | - | 23° × 21° | 70 × 53 | Low resolution image. MTF is 0.5 when spatial frequency is 0.4. |
| Stollberg et al., 2009 [23] | Gabor Superlens | CCD image sensor | 2.4 mm | 29° | 156 × 156 | Low resolution image, maximum resolution in image space is 49 LP/mm. |
| Bruckner et al., 2010 [36] | Thin wafer level camera lenses | CCD image sensor | - | 58° × 46° | 700 × 550 | Low resolution image, distortion image. |
| Meyer et al., 2011 [39] | oCLEY | CMOS image sensor | 1.39 mm | 53.2° × 39.9° | 640 × 480 | Spatial frequency has maximum value of 222 cycles/mm, a high angular resolution, to reach the VGA resolution. |
| Seo et al., 2018 [5] | Microlens integrate gold layer screening camera | CCD image sensor | 1.442 mm | 100° | 1920 × 1080 | High resolution image. |
| Kim et al., 2020 [40] | Ultrathin arrayed camera | CMOS image sensor | 150 µm | 73° | 8 Megapixel | High resolution image, MTF50 obtains 202 cycles.mm−1. |
| Author | Optical Components Integration | Focal Length | Numerical Aperture (NA) | FOV | Imaging Performance |
|---|---|---|---|---|---|
| Liu et al., 2012 [41] | Laser confocal microscope | 92.4 µm | 0.3 | 162° | No distortion image. |
| Bian et al., 2016 [43] | Microscope and CCD camera | 606.69 µm | 0.08 | - | Clear and sharp image. |
| Huang et al., 2017 [44] | Microscope system | 23.72 µm | 0.4 | - | Little distortion image. |
| Zhou et al., 2020 [46] | CCD imaging sensor | 18.98 µm | 0.46 | 161° | No distortion image, the FWHM intensity 3.2 ± 0.2 µm and 3.0 ± 0.1 µm along the x and y direction, respectively. |
| Deng et al., 2016 [47] | CCD camera | 32.8 µm | 0.5 | 140° | Distortion free image, the FWHM intensities are 1.7± 0.1 µm (x axis) and 1.6 ± 0.3 µm (y axis). |
| Li et al., 2020 [48] | Microscopy system | 100 µm | 0.4 | 140° | Distortion image, the FWHM intensity is 3 µm for two directions. |
| Wang et al., 2019 [49] | CMOS imaging sensor | 2.09 mm | 0.125 | 180° | Good imaging performance, no distortion image. |
| Keum et al., 2018 [51] | Microscope system | 1.4 mm | - | 68° | Image with high resolution, MTF50 was 154 cycle.mm−1. |
| Lian et al., 2020 [52] | CMOS imaging sensor | 1.2 mm | - | 109° | Distortion image. |
| Author | System | Optic Component Integration | FOV | Acceptance Angle | Interommaditium Angle | Imaging Performance |
|---|---|---|---|---|---|---|
| Song et al., 2013 [55] | Arthopod inspired camera | CMOS image sensor | 160° | 4.2° | 4.2° | High resolution image without aberration. |
| Floreano et al., 2013 [56] | CurveACE | CMOS image sensor | 180° × 60° | 9.7° | 11° | High resolution image, motion detection capabilities, crosstalk prevention. |
| Author | Size | FOV | Operating Wavelength | Focal Length | Imaging Performance |
|---|---|---|---|---|---|
| Salmanogli et al., 2018 [69] | Plasmonic nanoparticle with a radius around 50–100 nm | - | 808 nm | 68 µm | High image resolution. |
| Kogos et al., 2020 [70] | 60-nm thickness of SiO2 layer, 100 nm thick gold film with a 5-nm Titanium | 150° | 1550 nm | 10 mm | High-quality images with a 5280-pixel array at signal noise ratio of 73 dB. |
| Author | Size | FOV | Operating Wavelength | Numerical Aperture | Focal Length | Imaging Performance |
|---|---|---|---|---|---|---|
| Fan et al., 2020 [71] | Diameter of metalens is 110 µm | 170° | 532 nm | 0.64 | 2 mm | Focusing efficiency are 82% at a normal incident and 45% at an incident of 85°. High image quality without aberrations. |
| Fan et al., 2019 [64] | Thickness is 400 nm, metalens with a diameter of 14 µm | - | 430 to 780 nm | 0.086 | 81.5 µm | Focusing efficiency can be obtained in the range of 36–55% at all visible wavelengths. |
| Miyata et al., 2020 [72] | Size of metalenses is 100 × 200 µm2 | - | 520 nm | 0.8 | 500 µm | Image size is 400 × 400 pixels. Image is clear at 520 nm wavelength. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phan, H.L.; Yi, J.; Bae, J.; Ko, H.; Lee, S.; Cho, D.; Seo, J.-M.; Koo, K.-i. Artificial Compound Eye Systems and Their Application: A Review. Micromachines 2021, 12, 847. https://doi.org/10.3390/mi12070847
Phan HL, Yi J, Bae J, Ko H, Lee S, Cho D, Seo J-M, Koo K-i. Artificial Compound Eye Systems and Their Application: A Review. Micromachines. 2021; 12(7):847. https://doi.org/10.3390/mi12070847
Chicago/Turabian StylePhan, Huu Lam, Jungho Yi, Joonsung Bae, Hyoungho Ko, Sangmin Lee, Dongil Cho, Jong-Mo Seo, and Kyo-in Koo. 2021. "Artificial Compound Eye Systems and Their Application: A Review" Micromachines 12, no. 7: 847. https://doi.org/10.3390/mi12070847
APA StylePhan, H. L., Yi, J., Bae, J., Ko, H., Lee, S., Cho, D., Seo, J.-M., & Koo, K.-i. (2021). Artificial Compound Eye Systems and Their Application: A Review. Micromachines, 12(7), 847. https://doi.org/10.3390/mi12070847