
Overview of the MEMS Pirani Sensors

Abstract
:1. Introduction
2. Thermistor-Based Pirani Sensors
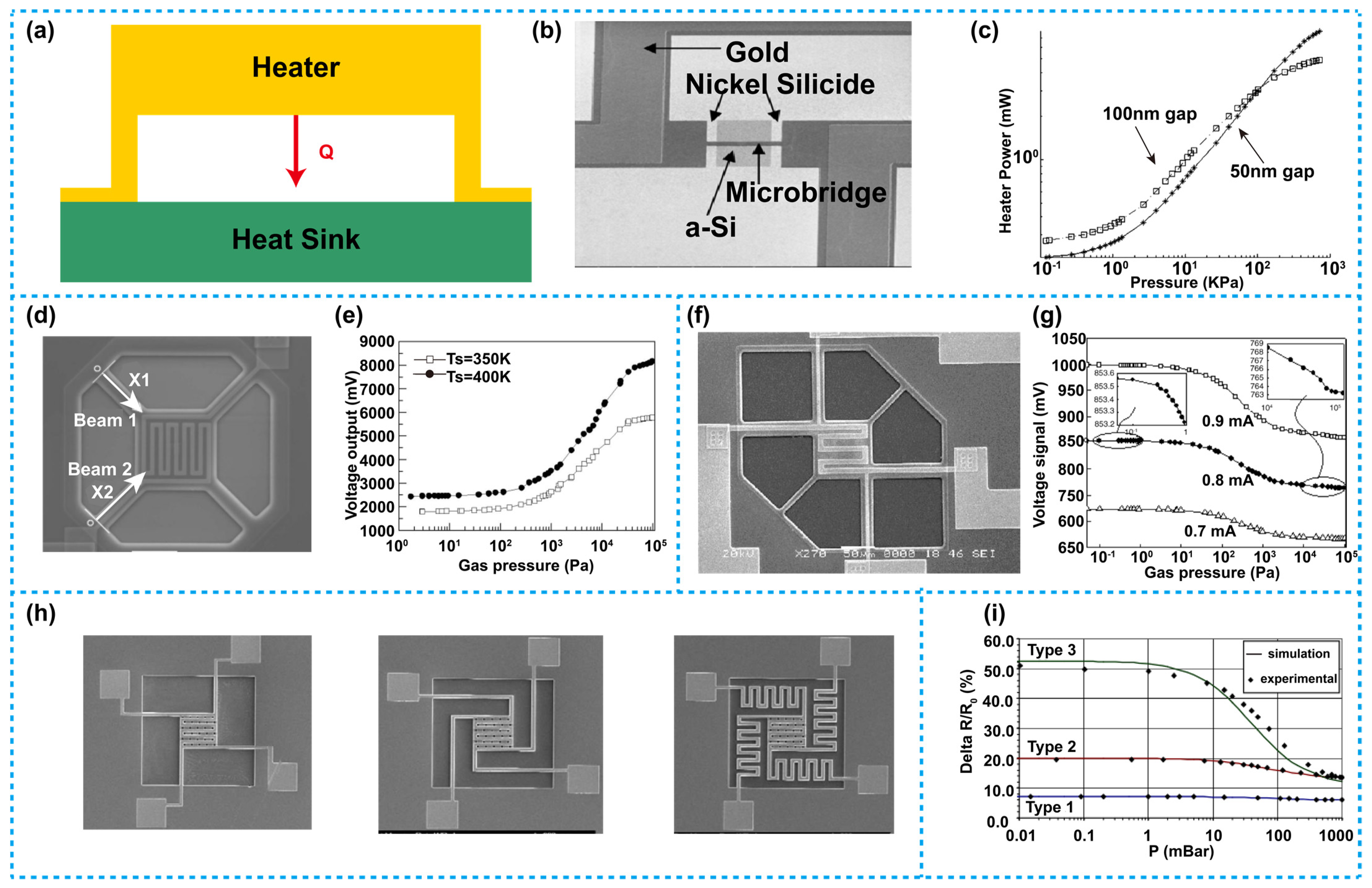
2.1. Vertical Heat Transfer Configuration
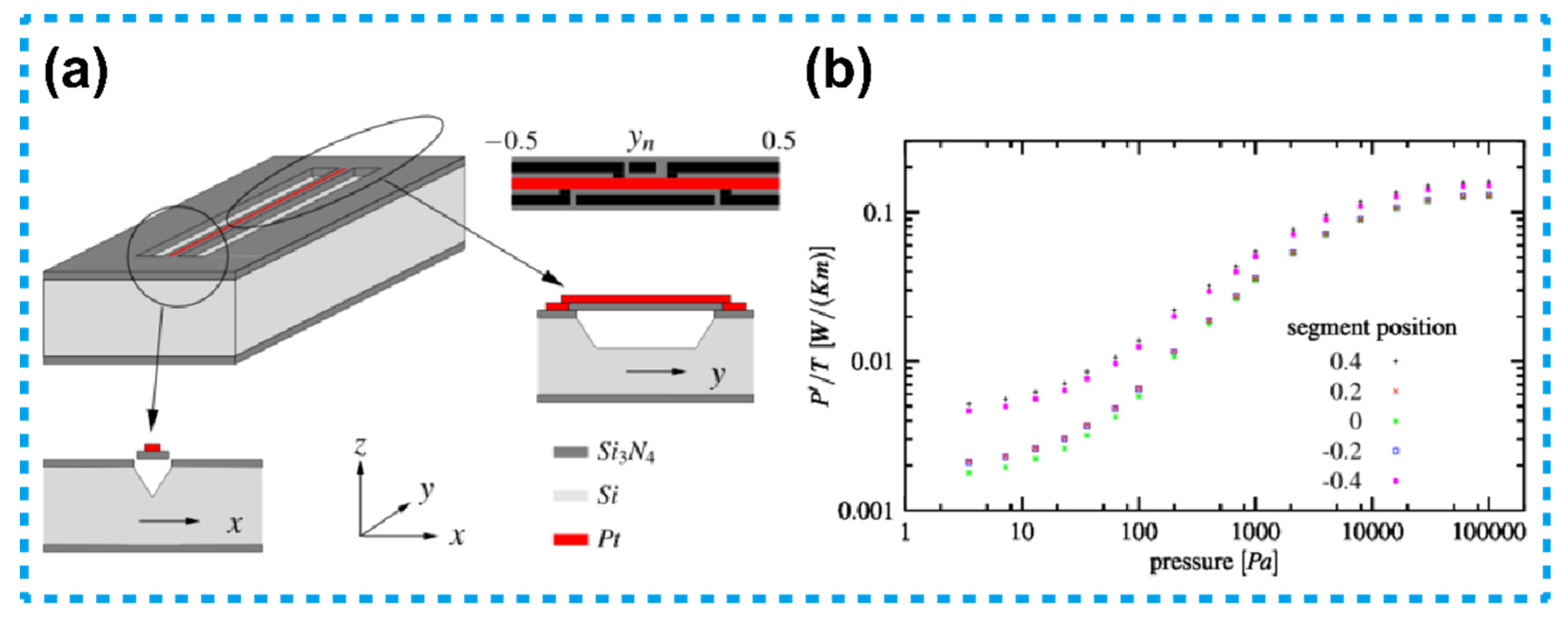
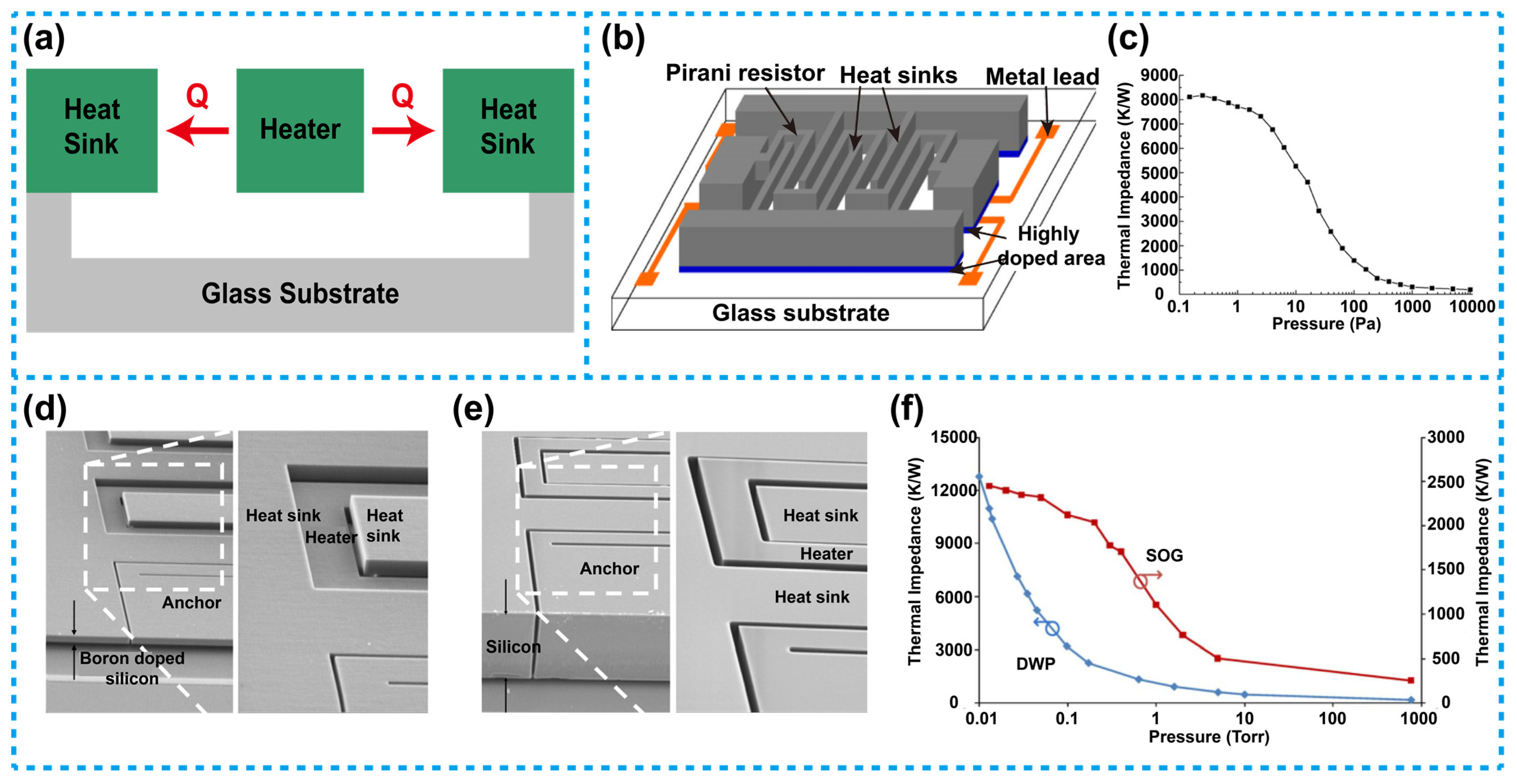
2.2. Lateral Heat Transfer Configuration
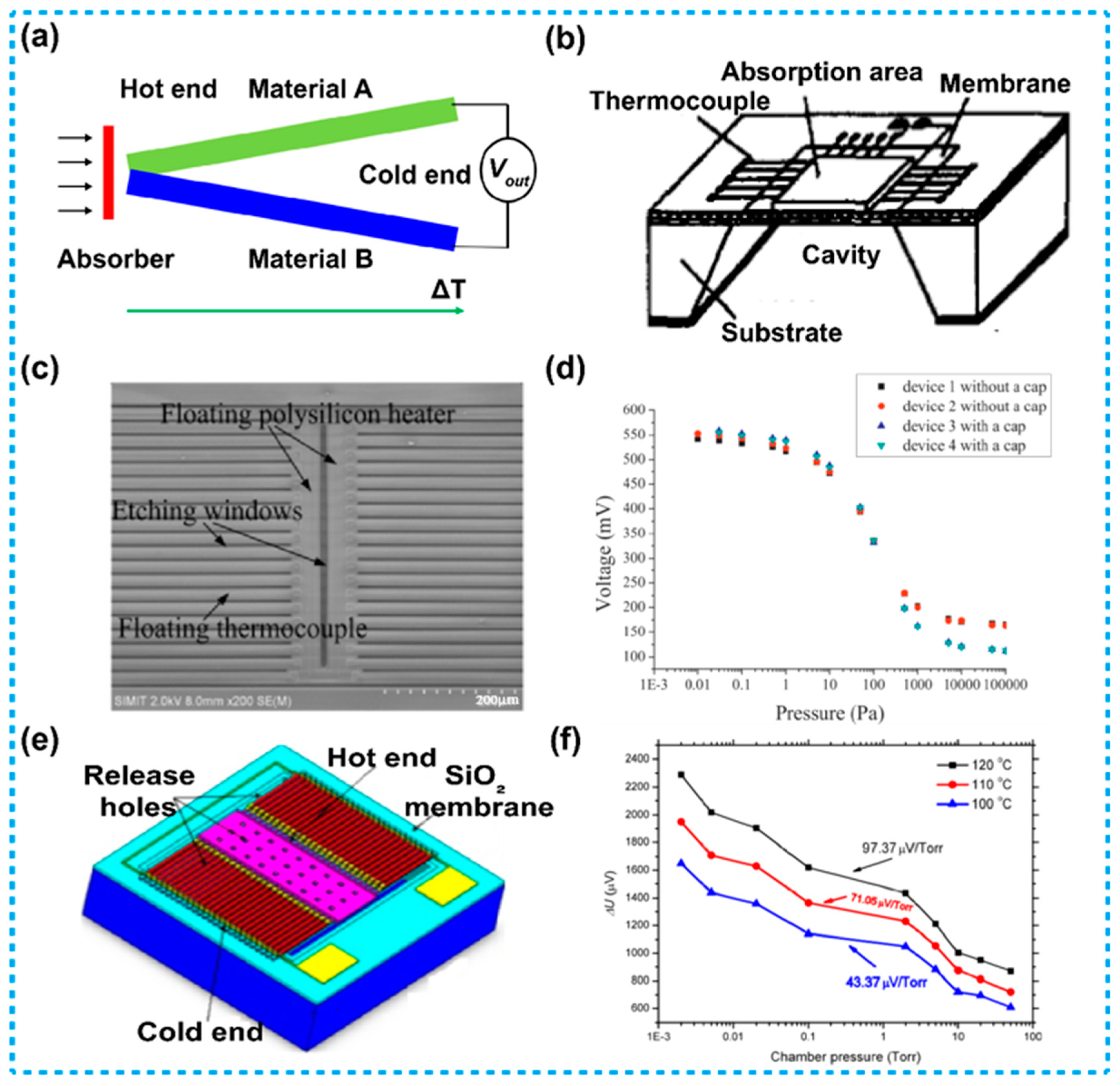
3. Thermocouple-Based Pirani Sensors
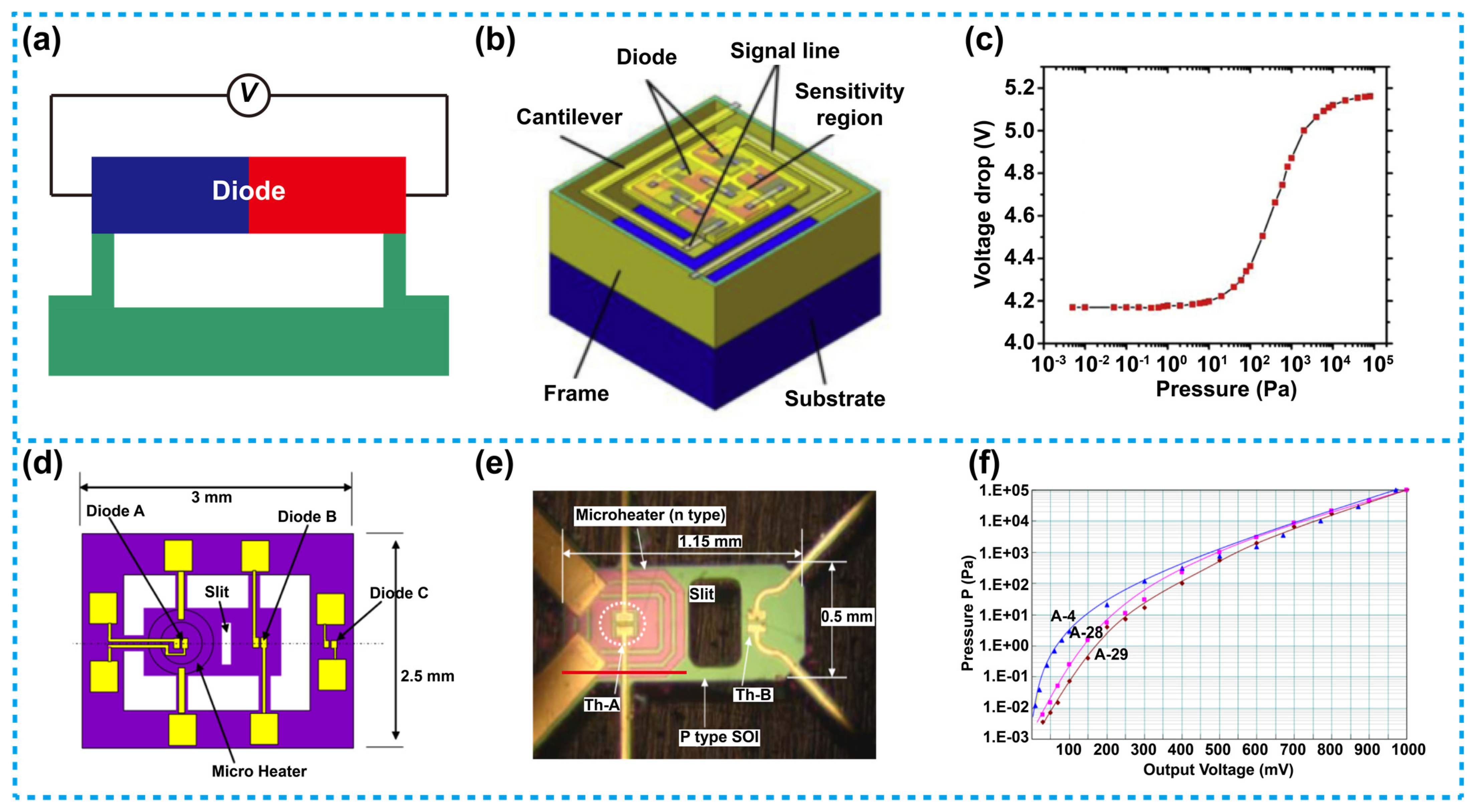
4. Diode-Based Pirani Sensors
5. SAW-Based Pirani Sensors
6. Functional Material-Based Pirani Sensors
7. Applications
8. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Redhead, P.A. Vacuum science and technology: 1950–2003. J. Vac. Sci. Technol. A Vac. Surf. Films 2003, 21, S12–S14. [Google Scholar] [CrossRef]
- Stach, T.; Johnson, M.C.; Stevens, S.; Burghaus, U. Adsorption and reaction kinetics of SO2 on graphene: An ultrahigh vacuum surface science study. J. Vac. Sci. Technol. A Vac. Surf. Films 2021, 39, 042201. [Google Scholar] [CrossRef]
- Li, X.; Shi, Z.; Behrouznejad, F.; Hatamvand, M.; Zhang, X.; Wang, Y.; Liu, F.; Wang, H.; Liu, K.; Dong, H.; et al. Highly efficient flexible perovskite solar cells with vacuum-assisted low-temperature annealed SnO2 electron transport layer. J. Energy Chem. 2021, 67, 1–7. [Google Scholar] [CrossRef]
- Belič, I. Neural networks and modelling in vacuum science. Vacuum 2006, 80, 1107–1122. [Google Scholar] [CrossRef]
- Lasek, K.; Li, J.; Kolekar, S.; Coelho, P.M.; Guo, L.; Zhang, M.; Wang, Z.; Batzill, M. Synthesis and characterization of 2D transition metal dichalcogenides: Recent progress from a vacuum surface science perspective. Surf. Sci. Rep. 2021, 76, 100523. [Google Scholar] [CrossRef]
- Nikkhou, M.; Hu, Y.; Sabin, J.A.; Millen, J. Direct and Clean Loading of Nanoparticles into Optical Traps at Millibar Pressures. Photonics 2021, 8, 458. [Google Scholar] [CrossRef]
- Shen, K.; Duan, Y.; Ju, P.; Xu, Z.; Chen, X.; Zhang, L.; Ahn, J.; Ni, X.; Li, T. On-chip optical levitation with a metalens in vacuum. Optica 2021, 8, 1359. [Google Scholar] [CrossRef]
- Forrest, S. Science and Technology at the Nanometer Scale Using Vacuum-Deposited Organic Thin Films. MRS Bull. 2001, 26, 108–112. [Google Scholar] [CrossRef]
- Waits, R.K. Evolution of integrated-circuit vacuum processes: 1959–1975. J. Vac. Sci. Technol. A Vac. Surf. Films 2000, 18, 1736–1745. [Google Scholar] [CrossRef]
- Nakamoto, M.; Moon, J. Stable and environment-hard vacuum nanoelectronic devices for aerospace applications. IOP Conf. Ser. Mater. Sci. Eng. 2019, 474, 012005. [Google Scholar] [CrossRef]
- Menta, V.; Vuppalapati, R.; Chandrashekhara, K.; Schuman, T.; Sha, J. Elevated-temperature vacuum-assisted resin transfer molding process for high performance aerospace composites. Polym. Int. 2013, 62, 1465–1476. [Google Scholar] [CrossRef]
- Mok, J.M.; Jackson, K.L.; Fang, R.; Freedman, B.A. Effect of vacuum spine board immobilization on incidence of pressure ulcers during evacuation of military casualties from theater. Spine J. 2013, 13, 1801–1808. [Google Scholar] [CrossRef] [PubMed]
- Rispoli, D.M.; Horne, B.R.; Kryzak, T.J.; Richardson, M.W. Description of a Technique for Vacuum-Assisted Deep Drains in the Management of Cavitary Defects and Deep Infections in Devastating Military and Civilian Trauma. J. Trauma Inj. Infect. Crit. Care 2010, 68, 1247–1252. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Liu, C.; Zhang, Z.; Liu, S.; Luo, X. A micro-machined Pirani gauge for vacuum measurement of ultra-small sized vacuum packaging. Sens. Actuators A Phys. 2010, 161, 108–113. [Google Scholar] [CrossRef]
- Choa, S. Reliability of vacuum packaged MEMS gyroscopes. Microelectron. Reliab. 2005, 45, 361–369. [Google Scholar] [CrossRef]
- Seshia, A.; Palaniapan, M.; Roessig, T.; Howe, R.; Gooch, R.; Schimert, T.; Montague, S. A vacuum packaged surface micromachined resonant accelerometer. J. Microelectromech. Syst. 2002, 11, 784–793. [Google Scholar] [CrossRef] [Green Version]
- Feng, F.; Zhang, Y.; Luo, F.; Wei, X.; Ge, X.; Wang, Y.; Li, X. MEMS based vacuum packaging method of optically readable infrared focal plane array. Microsyst. Technol. 2016, 23, 1793–1798. [Google Scholar] [CrossRef]
- Forsberg, F.; Roxhed, N.; Fischer, A.C.; Samel, B.; Ericsson, P.; Hoivik, N.; Lapadatu, A.; Bring, M.; Kittilsland, G.; Stemme, G.; et al. Very large scale heterogeneous integration (VLSHI) and wafer-level vacuum packaging for infrared bolometer focal plane arrays. Infrared Phys. Technol. 2013, 60, 251–259. [Google Scholar] [CrossRef]
- Ou, Y.; Li, Z.; Qu, F.; Yang, K.; Liu, Y.; Chen, D.; Ye, T. Investigation on Performance and Vacuum Package of MEMS Infrared Focal Plane Arrays. IEEE Electron Device Lett. 2013, 34, 453–455. [Google Scholar] [CrossRef]
- Jousten, K. On the gas species dependence of Pirani vacuum gauges. J. Vac. Sci. Technol. A Vac. Surf. Films 2008, 26, 352. [Google Scholar] [CrossRef]
- Ellett, A.; Zabel, R.M. The Pirani Gauge for the Measurement of Small Changes of Pressure. Phys. Rev. Ser. I 1931, 37, 1102–1111. [Google Scholar] [CrossRef]
- Xu, W.; Wang, X.; Pan, X.; Bermak, A.; Lee, Y.-K.; Yang, Y. A Wafer-Level Packaged CMOS MEMS Pirani Vacuum Gauge. IEEE Trans. Electron Devices 2021, 68, 5155–5161. [Google Scholar] [CrossRef]
- Garg, M.; Arya, D.S.; Sharma, S.; Kumar, S.; Uddin, W.; Das, S.; Chiu, Y.; Singh, P. Highly Responsive Metal Oxide (V2O5)-Based NEMS Pirani Gauge for In-Situ Hermeticity Monitoring. J. Microelectromechan. Syst. 2021, 30, 340–342. [Google Scholar] [CrossRef]
- Brun, T.; Mercier, D.; Koumela, A.; Marcoux, C.; Duraffourg, L. Silicon nanowire based Pirani sensor for vacuum measurements. Appl. Phys. Lett. 2012, 101, 183506. [Google Scholar] [CrossRef]
- Santagata, F.; Creemer, J.F.; Iervolino, E.; Sarro, P.M. Tube-shaped Pirani gauge forin situhermeticity monitoring of SiN thin-film encapsulation. J. Micromech. Microeng. 2012, 22, 105025. [Google Scholar] [CrossRef]
- Lee, D.; Noh, Y.; Park, S.; Kumar, M.; Cho, Y.S. Performance enhancement of Pirani gauge on silicon-on-insulator wafer with simple fabrication process. Sens. Actuators A Phys. 2017, 263, 264–268. [Google Scholar] [CrossRef]
- Li, Q.; Goosen, J.; Van Beek, J.; Van Keulen, F. A SOI Pirani sensor with triple heat sinks. Sens. Actuators A Phys. 2010, 162, 267–271. [Google Scholar] [CrossRef]
- Wang, C.; Hou, Z.; Kuang, Y.; Wu, Y.; Zhang, Y.; Wu, X.; Xiao, D. A newly MEMS vacuum gauge with multi-modes for low vacuum measurement. Vacuum 2021, 192, 110446. [Google Scholar] [CrossRef]
- Gan, H.; Qiu, Y.; Miao, M.; Jin, Y. A micro in-situ Pirani vacuum gauge for microsystem package applications. In Proceedings of the 2010 11th International Conference on Electronic Packaging Technology & High Density Packaging, Xi’an, China, 16–19 August 2010; pp. 125–129. [Google Scholar] [CrossRef]
- Liu, Y.; Li, R.; Zhou, N.; Li, M.; Huang, C.; Mao, H. Recyclable 3D SERS devices based on ZnO nanorod-grafted nanowire forests for biochemical sensing. Appl. Surf. Sci. 2021, 582, 152336. [Google Scholar] [CrossRef]
- Del Barrio, S.C.; Morris, A.; Pedersen, G.F. Antenna Miniaturization with MEMS Tunable Capacitors: Techniques and Trade-Offs. Int. J. Antennas Propag. 2014, 2014, 709580. [Google Scholar] [CrossRef]
- Anagnostou, D.; Chryssomallis, M.; Braaten, B.D.; Ebel, J.L.; Sepulveda, N. Reconfigurable UWB Antenna With RF-MEMS for On-Demand WLAN Rejection. IEEE Trans. Antennas Propag. 2013, 62, 602–608. [Google Scholar] [CrossRef]
- Zhao, J.; Jiang, Z.; Dobrzański, L.A.; Lee, C.S.; Yu, F. Recent Development in Micromanufacturing of Metallic Materials. Materials 2020, 13, 4046. [Google Scholar] [CrossRef] [PubMed]
- Du, S.; Jia, Y.; Zhao, C.; Amaratunga, G.A.J.; Seshia, A.A. A Nail-Size Piezoelectric Energy Harvesting System Integrating a MEMS Transducer and a CMOS SSHI Circuit. IEEE Sens. J. 2019, 20, 277–285. [Google Scholar] [CrossRef] [Green Version]
- Garg, M.; Arya, D.S.; Kumar, S.; Chiu, Y.; Singh, P. Reducing solid conduction in electrothermally driven MEMS Pirani gauge using integrated polymeric thin film. Appl. Phys. Lett. 2022, 120, 084101. [Google Scholar] [CrossRef]
- Xu, L.; Fang, L.; Huo, R.; Li, X. Research on MEMS Technology Application in Fuse. IOP Conf. Ser. Earth Environ. Sci. 2019, 252, 022011. [Google Scholar] [CrossRef]
- Sieber, A.; Valdastri, P.; Houston, K.; Menciassi, A.; Dario, P. Flip chip microassembly of a silicon triaxial force sensor on flexible substrates. Sens. Actuators A Phys. 2008, 142, 421–428. [Google Scholar] [CrossRef]
- He, Y.; Si, C.; Han, G.; Zhao, Y.; Ning, J.; Yang, F. A Novel Fabrication Method for a Capacitive MEMS Accelerometer Based on Glass–Silicon Composite Wafers. Micromachines 2021, 12, 102. [Google Scholar] [CrossRef]
- Strathman, M.; Liu, Y.; Keeler, E.G.; Song, M.; Baran, U.; Xi, J.; Sun, M.-T.; Wang, R.; Li, X.; Lin, L.Y. MEMS scanning micromirror for optical coherence tomography. Biomed. Opt. Express 2014, 6, 211–224. [Google Scholar] [CrossRef] [Green Version]
- Hera, D.; Berndt, A.; Günther, T.; Schmiel, S.; Harendt, C.; Zimmermann, A. Flexible Packaging by Film-Assisted Molding for Microintegration of Inertia Sensors. Sensors 2017, 17, 1511. [Google Scholar] [CrossRef] [Green Version]
- Ameel, T.; Warrington, R.; Wegeng, R.; Drost, M. Miniaturization technologies applied to energy systems. Energy Convers. Manag. 1997, 38, 969–982. [Google Scholar] [CrossRef]
- Hu, T.; Fang, K.; Zhang, Z.; Jiang, X.; Zhao, Y. The Research on MEMS S&A Device with Metal-Silicon Composite Structure. J. Microelectromech. Syst. 2019, 28, 1088–1099. [Google Scholar] [CrossRef]
- Deisingh, A.K. MEMS technology in analytical chemistry. Analyst 2002, 128, 10–11. [Google Scholar] [CrossRef] [PubMed]
- Chae, J.; Stark, B.; Najafi, K. A micromachined Pirani gauge with dual heat sinks. In Proceedings of the 17th IEEE International Conference on Micro Electro Mechanical Systems, Maastricht, The Netherlands, 25–29 January 2004; Volume 28, pp. 532–535. [Google Scholar] [CrossRef]
- Zhang, M.; Llaser, N. Investigating a Micro Pirani Gauge for Multi-Function Sensing. IEEE Sens. J. 2016, 16, 8062–8069. [Google Scholar] [CrossRef]
- Dankovic, T.; Punchihewa, K.A.G.; Zaker, E.; Farid, S.; Habibimehr, P.; Feinerman, A.; Busta, H. Extension of Operating Range Towards Lower Pressures of MEMS-based Thermal Vacuum Gauges by Laser-Induced Heating. Procedia Eng. 2012, 47, 1243–1246. [Google Scholar] [CrossRef] [Green Version]
- Mailly, F.; Dumas, N.; Pous, N.; Latorre, L.; Garel, O.; Martincic, E.; Verjus, F.; Pellet, C.; Dufour-Gergam, E.; Nouet, P. Pirani pressure sensor for smart wafer-level packaging. Sens. Actuators A Phys. 2009, 156, 201–207. [Google Scholar] [CrossRef]
- Ghouila-Houri, C.; Talbi, A.; Viard, R.; Moutaouekkil, M.; Elmazria, O.; Gallas, Q.; Garnier, E.; Merlen, A.; Pernod, P. High temperature gradient nanogap-Pirani micro-sensor with maximum sensitivity around atmospheric pressure. Appl. Phys. Lett. 2017, 111, 113502. [Google Scholar] [CrossRef] [Green Version]
- Völklein, F.; Grau, M.; Meier, A.; Hemer, G.; Breuer, L.; Woias, P. Optimized MEMS Pirani sensor with increased pressure measurement sensitivity in the fine and high vacuum regime. J. Vac. Sci. Technol. A Vac. Surf. Films 2013, 31, 61604. [Google Scholar] [CrossRef]
- Santagata, F.; Creemer, J.F.; Iervolino, E.; Mele, L.; Van Herwaarden, A.W.; Sarro, P.M. A Tube-Shaped Buried Pirani Gauge for Low Detection Limit With Small Footprint. J. Microelectromech. Syst. 2011, 20, 676–684. [Google Scholar] [CrossRef]
- Mo, J.; Middelburg, L.M.; Morana, B.; van Zeijl, H.W.; Vollebregt, S.; Zhang, G. Surface-Micromachined Silicon Carbide Pirani Gauges for Harsh Environments. IEEE Sens. J. 2020, 21, 1350–1358. [Google Scholar] [CrossRef]
- Marconot, O.; Lecler, S.; Newby, P.J.; Frechette, L.G. Dimensionless Analysis of Micro Pirani Gauges for Broad Pressure Sensing Range. IEEE Sens. J. 2020, 20, 9937–9946. [Google Scholar] [CrossRef]
- Santagata, F.; Iervolino, E.; Mele, L.; Van Herwaarden, A.W.; Creemer, J.F.; Sarro, P.M. An analytical model and verification for MEMS Pirani gauges. J. Micromech. Microeng. 2011, 21, 115007. [Google Scholar] [CrossRef]
- Schelcher, G.; Lefeuvre, E.; Brault, S.; Parrain, F.; Martincic, E.; Dufour-Gergam, E.; Bosseboeuf, A. Micro Pirani vacuum gauges manufactured by a film transfer process. Procedia Eng. 2010, 5, 1136–1139. [Google Scholar] [CrossRef] [Green Version]
- Moutaouekkil, M.; Talbi, A.; Viard, R.; Gerbedoen, J.-C.; Okada, E.; Elmazria, O.; Preobrazhensky, V.; Merlen, A.; Pernod, P.; Joint International Laboratory LIA Lics/Lemac; et al. Elaboration of a Novel Design Pirani Pressure Sensor for High Dynamic Range Operation and Fast Response Time. Procedia Eng. 2015, 120, 225–228. [Google Scholar] [CrossRef] [Green Version]
- Grzebyk, T.; Gorecka-Drzazga, A.; Dziuban, J.A.; Maamari, K.; An, S.; Dankovic, T.; Feinerman, A.; Busta, H. Integration of a MEMS-type vacuum pump with a MEMS-type Pirani pressure gauge. J. Vac. Sci. Technol. B Nanotechnol. Microelectron. Mater. Process. Meas. Phenom. 2015, 33, 3. [Google Scholar] [CrossRef]
- Xiao, B.; Dong, T.; Halvorsen, E.; Yang, Z.; Zhang, Y.; Hoivik, N.; Gu, D.; Tran, N.M.; Jakobsen, H. Integrated micro Pirani gauge based hermetical package monitoring for uncooled VO x bolometer FPAs. Microsyst. Technol. 2010, 17, 115–125. [Google Scholar] [CrossRef]
- Zhang, M.; Bournel, A.; Llaser, N. Educational project on the design of interface circuit for a Pirani pressure sensor. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018. [Google Scholar] [CrossRef]
- Wang, J.; Tang, Z. A Fully CMOS-Compatible Micro-Pirani Gauge based on a Constant Current. In Proceedings of the 2009 IEEE 22nd International Conference on Micro Electro Mechanical Systems, Sorrento, Italy, 25–29 January 2009. [Google Scholar] [CrossRef]
- Mitchell, J.; Lahiji, G.; Najafi, K. An Improved Performance Poly-Si Pirani Vacuum Gauge Using Heat-Distributing Structural Supports. J. Microelectromech. Syst. 2008, 17, 93–102. [Google Scholar] [CrossRef]
- Grau, M.; Völklein, F.; Meier, A.; Kunz, C.; Kaufmann, I.; Woias, P. Optimized MEMS Pirani sensor with increased pressure measurement sensitivity in the fine and rough vacuum regimes. J. Vac. Sci. Technol. A Vac. Surf. Films 2015, 33, 021601. [Google Scholar] [CrossRef]
- Lai, J.; Kong, Y.; Jiao, B.; Ye, Y.; Yun, S.; Liu, R.; Ye, M.; Zhang, G. Study on Fusion Mechanisms for Sensitivity Improvement and Measurable Pressure Limit Extension of Pirani Vacuum Gauges With Multi Heat Sinks. J. Microelectromech. Syst. 2019, 29, 100–108. [Google Scholar] [CrossRef]
- Sun, Y.-C.; Liang, K.-C.; Cheng, C.-L.; Fang, W. A CMOS MEMS Pirani vacuum gauge with complementary bump heat sink and cavity heater. In Proceedings of the 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014. [Google Scholar] [CrossRef]
- Zhang, L.-M.; Jiao, B.-B.; Yun, S.-C.; Kong, Y.-M.; Chen, D.-P. Investigation and Optimization of Pirani Vacuum Gauges With Monocrystal Silicon Heaters and Heat Sinks. J. Microelectromech. Syst. 2017, 26, 1–8. [Google Scholar] [CrossRef]
- Zhang, L.-M.; Jiao, B.-B.; Yun, S.-C.; Kong, Y.-M.; Ku, C.-W.; Chen, D.-P. A CMOS Compatible MEMS Pirani Vacuum Gauge with Monocrystal Silicon Heaters and Heat Sinks. Chin. Phys. Lett. 2017, 34, 025101. [Google Scholar] [CrossRef]
- Khosraviani, K.; Leung, A.M. The nanogap Pirani—A pressure sensor with superior linearity in an atmospheric pressure range. J. Micromech. Microeng. 2009, 19, 045007. [Google Scholar] [CrossRef]
- Wang, J.; Tang, Z.; Li, J. Tungsten-Microhotplate-Array-Based Pirani Vacuum Sensor System With On-Chip Digital Front-End Processor. J. Microelectromech. Syst. 2011, 20, 834–841. [Google Scholar] [CrossRef]
- Wang, J.; Yu, J. Multifunctional Platform with CMOS-Compatible Tungsten Microhotplate for Pirani, Temperature, and Gas Sensor. Micromachines 2015, 6, 1597–1605. [Google Scholar] [CrossRef] [Green Version]
- Puers, R.; Reyntjens, S.; De Bruyker, D. The NanoPirani—An extremely miniaturized pressure sensor fabricated by focused ion beam rapid prototyping. Sens. Actuators A Phys. 2002, 97–98, 208–214. [Google Scholar] [CrossRef]
- Doms, M.; Bekesch, A.; Mueller, J. A microfabricated Pirani pressure sensor operating near atmospheric pressure. J. Micromech. Microeng. 2005, 15, 1504–1510. [Google Scholar] [CrossRef]
- Sturesson, P.; Klintberg, L.; Thornell, G. Pirani microgauge fabricated of high-temperature co-fired ceramics with integrated platinum wires. Sens. Actuators A Phys. 2018, 285, 8–16. [Google Scholar] [CrossRef]
- Lefeuvre, E.; Martincic, E.; Woytasik, M.; Leroux, X.; Edmond, S.; Pellet, C.; Nouet, P.; Dufour-Gergam, E. Silicon on insulator temperature and pressure sensor for MEMS smart packaging. Procedia Chem. 2009, 1, 782–785. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.T.; Tang, Z.A.; Yu, J.; Jin, R.C. Thermal Analysis of a Constant Temperature Pirani Gauge Based on Micro-hotplate. In Proceedings of the 2006 1st IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Zhuhai, China, 18–21 January 2006. [Google Scholar] [CrossRef]
- Zhang, F.; Tang, Z.; Yu, J.; Jin, R. A micro-Pirani vacuum gauge based on micro-hotplate technology. Sens. Actuators A Phys. 2006, 126, 300–305. [Google Scholar] [CrossRef]
- van Baar, J.J.; Wiegerink, R.J.; Lammerink, T.S.J.; Krijnen, G.J.M.; Elwenspoek, M. Pirani Pressure Sensor with Distributed Temperature Sensing. In Proceedings of the ASME 2001 International Mechanical Engineering Congress and Exposition, New York, NY, USA, 11–16 November 2001; Volume 3, pp. 115–122. [Google Scholar] [CrossRef]
- van Baar, J.; Wiegerink, R.; Berenschot, J.; Lammerink, T.; Krijnen, G.; Elwenspoek, M. Pressure sensor based on distributed temperature sensing. In Proceedings of the SENSORS, 2002 IEEE, Orlando, FL, USA, 12–14 June 2002. [Google Scholar] [CrossRef] [Green Version]
- Van Baar, J.; Wiegerink, R.; Lammerink, T.; Berenschot, E.; Krijnen, G.J.; Elwenspoek, M. Combined Pirani/bending membrane-pressure sensor. In Proceedings of the Technical Digest, MEMS 2002 IEEE International Conference, Fifteenth IEEE International Conference on Micro Electro Mechanical Systems (Cat. No.02CH37266), Las Vegas, NV, USA, 24 January 2002. [Google Scholar] [CrossRef] [Green Version]
- Jiang, W.; Wang, X.; Zhang, J. A single crystal silicon micro-Pirani vacuum gauge with high aspect ratio structure. Sens. Actuators A Phys. 2010, 163, 159–163. [Google Scholar] [CrossRef]
- Topalli, E.S.; Topalli, K.; Alper, S.E.; Serin, T.; Akin, T. Pirani Vacuum Gauges Using Silicon-on-Glass and Dissolved-Wafer Processes for the Characterization of MEMS Vacuum Packaging. IEEE Sens. J. 2009, 9, 263–270. [Google Scholar] [CrossRef]
- Kubota, M.; Mita, Y.; Sugiyama, M. Silicon sub-micron-gap deep trench Pirani vacuum gauge for operation at atmospheric pressure. J. Micromechan. Microeng. 2011, 21, 045034. [Google Scholar] [CrossRef]
- Zhang, G.; Lai, J.; Kong, Y.; Jiao, B.; Yun, S.; Ye, Y. Study of cavity effect in micro-Pirani gauge chamber with improved sensitivity for high vacuum regime. AIP Adv. 2018, 8, 055131. [Google Scholar] [CrossRef]
- Mattsson, C.G.; Thungstrom, G.; Bertilsson, K.; Nilsson, H.-E.; Martin, H. Design of a Micromachined Thermopile Infrared Sensor With a Self-Supported SiO2/SU—8 Membrane. IEEE Sens. J. 2008, 8, 2044–2052. [Google Scholar] [CrossRef]
- Chen, S.-J.; Ding, R.-T. Investigation on an Active Thermoelectric Vacuum Sensor with Low Frequency Modulation. IOP Conf. Ser. Mater. Sci. Eng. 2019, 644, 012024. [Google Scholar] [CrossRef]
- Randjelović, D.V.; Frantlović, M.P.; Miljković, B.L.; Popović, B.M.; Jakšić, Z.S. Intelligent thermal vacuum sensors based on multipurpose thermopile MEMS chips. Vacuum 2013, 101, 118–124. [Google Scholar] [CrossRef]
- Randjelović, D.; Petropoulos, A.; Kaltsas, G.; Stojanović, M.; Lazić, Z.; Djurić, Z.; Matić, M. Multipurpose MEMS thermal sensor based on thermopiles. Sens. Actuators A Phys. 2008, 141, 404–413. [Google Scholar] [CrossRef]
- Chen, S.-J.; Wu, Y.-C. A New Macro-Model of Gas Flow and Parameter Extraction for a CMOS-MEMS Vacuum Sensor. Symmetry 2020, 12, 1604. [Google Scholar] [CrossRef]
- Berlicki, T. Thermal vacuum sensor with compensation of heat transfer. Sens. Actuators A Phys. 2001, 93, 27–32. [Google Scholar] [CrossRef]
- Piotto, M.; Del Cesta, S.; Bruschi, P. A CMOS compatible micro-Pirani vacuum sensor based on mutual heat transfer with 5-decade operating range and 0.3 Pa detection limit. Sens. Actuators A Phys. 2017, 263, 718–726. [Google Scholar] [CrossRef]
- Sun, X.; Xu, D.; Xiong, B.; Wu, G.; Wang, Y. A wide measurement pressure range CMOS-MEMS based integrated thermopile vacuum gauge with an XeF2 dry-etching process. Sens. Actuators A Phys. 2013, 201, 428–433. [Google Scholar] [CrossRef]
- Lei, C.; Mao, H.; Ou, W.; Xue, C.; Tang, L.; Yang, T.; Chen, D.; Xiong, J. A CMOS-MEMS IR device based on double-layer thermocouples. Microsyst. Technol. 2015, 22, 1163–1171. [Google Scholar] [CrossRef]
- Wei, D.; Fu, J.; Liu, R.; Hou, Y.; Liu, C.; Wang, W.; Chen, D. Compact micro-Pirani vacuum sensor based on series diodes without heating structure. Sens. Actuators A Phys. 2019, 289, 11–18. [Google Scholar] [CrossRef]
- Kimura, M.; Sakurai, F.; Ohta, H.; Terada, T. Proposal of a new structural thermal vacuum sensor with diode-thermistors combined with a micro-air-bridge heater. Microelectron. J. 2007, 38, 171–176. [Google Scholar] [CrossRef]
- Wei, D.; Fu, J.; Liu, R.; Hou, Y.; Liu, C.; Wang, W.; Chen, D. Highly Sensitive Diode-Based Micro-Pirani Vacuum Sensor with Low Power Consumption. Sensors 2019, 19, 188. [Google Scholar] [CrossRef] [Green Version]
- Mercier, D.; Bordel, G.; Brunet-Manquat, P.; Verrun, S.; Elmazria, O.; Sarry, F.; Belgacem, B.; Bounoua, J. Characterization of a SAW-Pirani vacuum sensor for two different operating modes. Sens. Actuators A Phys. 2012, 188, 41–47. [Google Scholar] [CrossRef]
- Toto, S.; Nicolay, P.; Morini, G.L.; Rapp, M.; Korvink, J.G.; Brandner, J.J. Correction: Design and Simulation of a Wireless SAW–Pirani Sensor with Extended Range and Sensitivity. Sensors 2019, 19, 3243. [Google Scholar] [CrossRef] [Green Version]
- Toto, S.; Jouda, M.; Korvink, J.G.; Sundarayyan, S.; Voigt, A.; Davoodi, H.; Brandner, J.J. Characterization of a Wireless Vacuum Sensor Prototype Based on the SAW-Pirani Principle. Processes 2020, 8, 1685. [Google Scholar] [CrossRef]
- Toto, S.; Nicolay, P.; Morini, G.L.; Voigt, A.; Korvink, J.; Brandner, J.J. Toward a Compact Wireless Surface Acoustic Wave Pirani Microsensor with Extended Range and Sensitivity. Heat Transf. Eng. 2020, 42, 565–578. [Google Scholar] [CrossRef]
- Singh, K.J.; Elmazria, O.; Sarry, F.; Nicolay, P.; Ghoumid, K.; Belgacem, B.; Mercier, D.; Bounouar, J. Enhanced Sensitivity of SAW-Based Pirani Vacuum Pressure Sensor. IEEE Sens. J. 2010, 11, 1458–1464. [Google Scholar] [CrossRef]
- Jeon, G.-J.; Kim, W.Y.; Bin Shim, H.; Lee, H.C. Nanoporous Pirani sensor based on anodic aluminum oxide. Appl. Phys. Lett. 2016, 109, 123505. [Google Scholar] [CrossRef]
- Kemp, J. Dynamic range. IEEE Trans. Nanotechnol. 2019, 8, 84–92. [Google Scholar] [CrossRef]
- Kawano, T.; Chiamori, H.C.; Suter, M.; Zhou, Q.; Sosnowchik, B.D.; Lin, L. An Electrothermal Carbon Nanotube Gas Sensor. Nano Lett. 2007, 7, 3686–3690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, F.; Zhang, J. Single-Walled Carbon Nanotube Pirani Gauges Prepared by DEP Assembly. IEEE Trans. Nanotechnol. 2013, 12, 323–329. [Google Scholar] [CrossRef]
- Romijn, J.; Dolleman, R.J.; Singh, M.; van der Zant, H.S.J.; Steeneken, P.G.; Sarro, P.M.; Vollebregt, S. Multi-layer graphene pirani pressure sensors. Nanotechnology 2021, 32, 335501. [Google Scholar] [CrossRef]
- Shirhatti, V.; Nuthalapati, S.; Kedambaimoole, V.; Bhardwaj, A.; Nayak, M.M.; Rajanna, K. Broad-Range Fast Response Vacuum Pressure Sensors Based on a Graphene Nanocomposite with Hollow α-Fe2O3 Microspheres. ACS Appl. Electron. Mater. 2020, 2, 2429–2439. [Google Scholar] [CrossRef]
- Ahn, S.I.; Jung, J.; Kim, Y.; Lee, Y.; Kim, K.; Lee, S.E.; Kim, S.; Choi, K.-K. Self-assembled and intercalated film of reduced graphene oxide for a novel vacuum pressure sensor. Sci. Rep. 2016, 6, 38830. [Google Scholar] [CrossRef] [Green Version]
- Gruner, G. Carbon nanotube transistors for biosensing applications. Anal. Bioanal. Chem. 2005, 384, 322–335. [Google Scholar] [CrossRef]
- Jensen, A.; Hauptmann, J.R.; Nygård, J.; Sadowski, J.; Lindelof, P.E. Hybrid Devices from Single Wall Carbon Nanotubes Epitaxially Grown into a Semiconductor Heterostructure. Nano Lett. 2004, 4, 349–352. [Google Scholar] [CrossRef]
- Baughman, R.H.; Zakhidov, A.A.; de Heer, W.A. Carbon Nanotubes—The Route Toward Applications. Science 2002, 297, 787–792. [Google Scholar] [CrossRef] [Green Version]
- Hernaez, M. Applications of Graphene-Based Materials in Sensors. Sensors 2020, 20, 3196. [Google Scholar] [CrossRef]
- Bolotin, K.; Sikes, K.; Jiang, Z.; Klima, M.; Fudenberg, G.; Hone, J.; Kim, P.; Stormer, H. Ultrahigh electron mobility in suspended graphene. Solid State Commun. 2008, 146, 351–355. [Google Scholar] [CrossRef] [Green Version]
- Xie, T.; Wang, Q.; Wallace, R.M.; Gong, C. Understanding and optimization of graphene gas sensors. Appl. Phys. Lett. 2021, 119, 013104. [Google Scholar] [CrossRef]
- Huo, Q.; Jin, J.; Wang, X.; Lu, S.; Zhang, Y.; Ma, J.; Wang, S. Preparation of graphene-based sensor and its application in human behavior monitoring. Mater. Res. Express 2019, 6, 075613. [Google Scholar] [CrossRef]
- Romijn, J.; Vollebregt, S.; Dolleman, R.J.; Singh, M.; van der Zant, H.S.; Steeneken, P.G.; Sarro, P.M. A Miniaturized Low Power Pirani Pressure Sensor Based on Suspended Graphene. In Proceedings of the 2018 IEEE 13th Annual International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Singapore, 22–26 April 2018. [Google Scholar] [CrossRef] [Green Version]
- Völklein, F.; Meier, A. Microstructured vacuum gauges and their future perspectives. Vacuum 2007, 82, 420–430. [Google Scholar] [CrossRef]
- Chen, Y.-C.; Lin, W.-C.; Wang, H.-S.; Fan, C.-C.; Lin, K.C.-H.; Chou, B.C.; Liu, M.C.-M. Differential micro-Pirani gauge for monitoring MEMS wafer-level package. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Estoril, Portugal, 18–22 January 2015. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Lower Detection Limit | Upper Detection Limit | Min Active Area | Min Power Consumption | Max Average Sensitivity | Common Active Materials | CMOS Compatible | |
|---|---|---|---|---|---|---|---|---|
| Thermistor | Vertical | 10−1 Pa | 7 × 105 Pa | 1.35 µm2 | 160 µW | 3.11 mV/Pa | Metal/Silicon | Yes |
| Lateral | 1.333 Pa | 105 Pa | 0.13 mm2 | 7 mW | 12.85 mV/Pa | Silicon | Yes | |
| Thermocouple | 5 × 10−3 Pa | 105 Pa | 0.1 mm2 | 1.1 mW | 104 mV/dec | Metal/Poly-Si | Yes | |
| Diode | 2 × 10−3 Pa | 105 Pa | 1225 µm2 | 50 µW | 90 µV/Pa | Silicon | Yes | |
| SAW | 10−3 Pa | 105 Pa | 2.4 mm2 | 125 mW | 1.38 MHz/Pa | piezoelectric materials | No | |
| Functional material | Nanoporous | 10−2 Pa | 105 Pa | 0.04 mm2 | N/A | N/A | AAO | No |
| CNT | 10−4 Pa | 105 Pa | N/A | 15 nW | 8 KΩ/Pa | CNT | No | |
| Graphene | 4 × 10−4 Pa | 105 Pa | 10 µm2 | 8.5 mW | 2.5%/dec | Graphene | No | |
| Equipment/Sensors | Working Pressure |
|---|---|
| Reactive Ion Etching | ≤10−3 Pa |
| Microbolometer | ≤10−2 Pa |
| Gyroscope | 10−2–10 Pa |
| Resonator | 10−2–10 Pa |
| Radio Frequency Switch | 10−2–10 Pa |
| Physical Vapor Deposition | 10−1–10 Pa |
| Uncooled Focal Plane Array | ≤5 Pa |
| Chemical Vapor Deposition | 103–4 × 104 Pa |
| Accelerometer | 3 × 104–7 × 104 Pa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, S.; Zhou, N.; Shi, M.; Zhang, C.; Chen, D.; Mao, H. Overview of the MEMS Pirani Sensors. Micromachines 2022, 13, 945. https://doi.org/10.3390/mi13060945
Xu S, Zhou N, Shi M, Zhang C, Chen D, Mao H. Overview of the MEMS Pirani Sensors. Micromachines. 2022; 13(6):945. https://doi.org/10.3390/mi13060945
Chicago/Turabian StyleXu, Shaohang, Na Zhou, Meng Shi, Chenchen Zhang, Dapeng Chen, and Haiyang Mao. 2022. "Overview of the MEMS Pirani Sensors" Micromachines 13, no. 6: 945. https://doi.org/10.3390/mi13060945