
Proposed Supercluster-Based UMBBFS Routing Protocol for Emergency Message Dissemination in Edge-RSU for 5G VANET


Abstract
:1. Introduction
- Communication overhead: Due to its limited bandwidth and mobility, the current combination of insufficient communication technologies results in a large communication overhead. Additionally, incorrect base station, RSU deployment, and network structure limit the network’s capacity to scale, increasing communication overhead.
- High packet loss: Some of the pre-existing works included direct routing. However, the lack of vehicle clustering leads to packet loss. Contrarily, clustering is based on parameters such as direction, velocity, and distance of movement. As a result, stability, reliability, energy efficiency, and packet loss are reduced when choosing the CH. However, these criteria alone are insufficient.
- Transmission delay: The choice of a cluster head or a vehicle performing routing independently by just looking at its information leads to inefficient routing that interferes with packet transport. On the other hand, cluster heads are chosen for emergency message transmission depending on the direction angle. However, while sending messages, additional factors (such as distance, node location, and energy) are not taken into account, causing transmission delays. Additionally, the choice of the forwarder is made based on beacon messages and neighbor locations. However, other factors (such as speed, lane condition, and distance) are not taken into account, causing transmission delays.
- Inefficient emergency message dissemination: The next hop selects the best forwarder based on a single moving direction. However, it results in the distribution of emergency messages being ineffective. Estimates of decision areas are often based only on transmission ranges in existing installations. However, since these factors are ineffective at determining decision areas, message transmission becomes difficult. Dissemination of emergency messages in this situation is limited to atypical cars and accidents. However, another emergency message (such as an ambulance alert or a list of local pharmacies) was not considered, resulting in the ineffective distribution of emergency messages. Additionally, it narrows the selection of practical and reasonably priced transportation choices and worsens traffic congestion on the roadways.
- To mitigate communication overhead, we employ a network construction approach that combines 2D and 3D elements. Furthermore, we establish robust vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), and vehicle-to-pedestrian (V2P) communication channels. These enhancements collectively serve to optimize network communication and efficiency.
- To enhance routing efficiency and bolster routing reliability, a clustering approach is implemented. This clustering technique is designed to improve the overall performance of the routing process within the network.
- To minimize transmission delay and reduce the occurrence of high packet loss, we implemented optimal routing strategies and employed a careful selection process to identify the most suitable forwarder nodes. All of these steps improved the network’s data transmission reliability and efficiency.
- To enhance message transmission, we adopted a strategy that involved selecting decision areas and classifying emergency messages, allowing them to be transmitted effectively in multiple directions and thereby increasing their reach and impact.
2. Literature Review
3. Proposed Method
- Two-dimensional (2D) with 3D grid-based network construction.
- Energy-saving-based super-clustering.
- Hybrid protocol-based path selection.
- DRL-based emergency message dissemination.
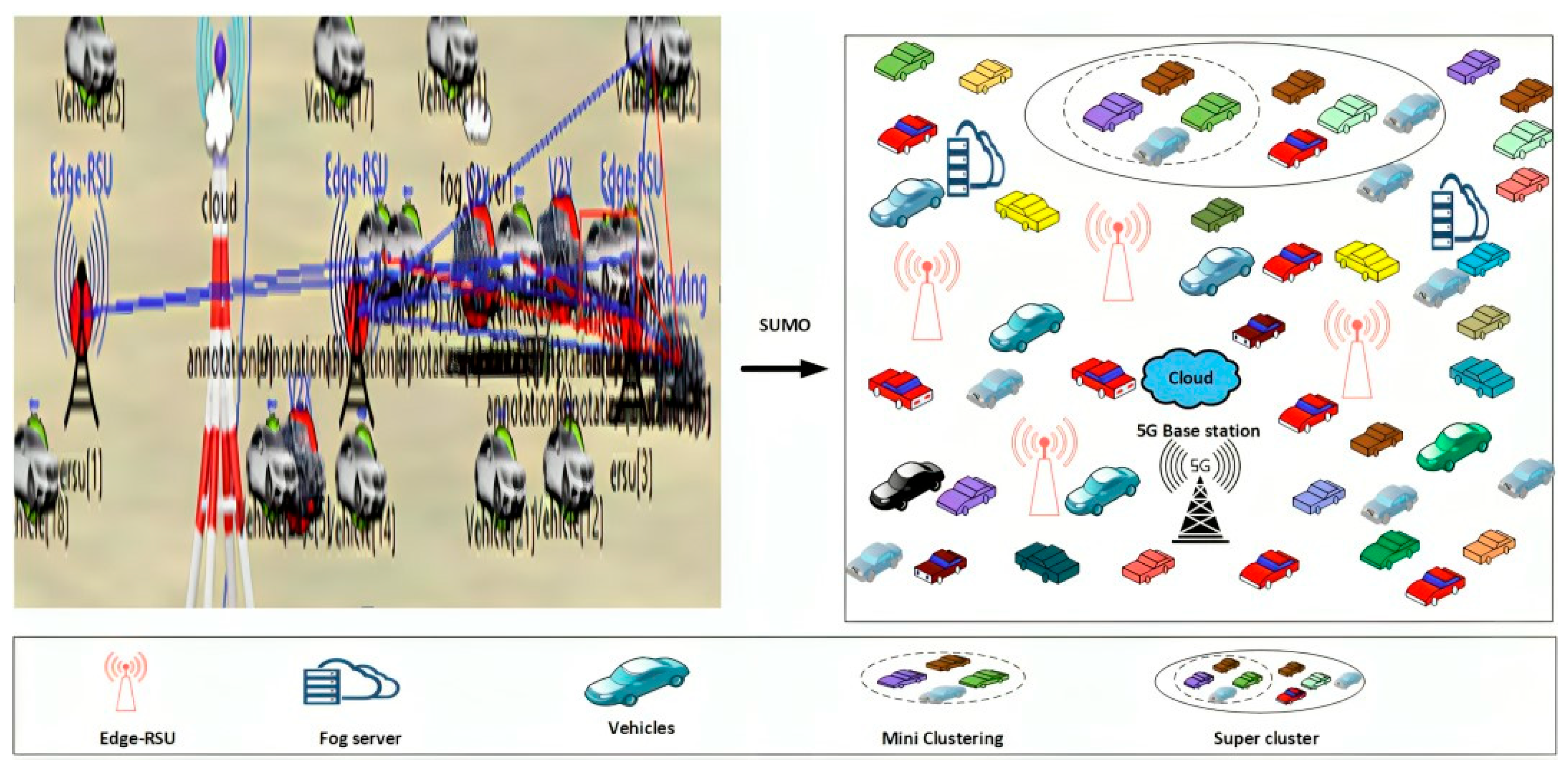
3.1. 2D with 3D Grid-Based Network Construction
3.2. Energy Saving-Based Super-Clustering
Fog Node Location Model
- Modified density peak clustering (MDPC) algorithm.
3.3. Hybrid Protocol-Based Path Selection
Urban Multi-Hop Broadcast and Best Forwarder Selection (UMBBFS) Protocol
- Multi-hop broadcast.
- 2.
- Neighboring nodes on the intersecting road.
- 3.
- One-hop delay in multi-direction.
- 4.
- Best forwarder selection.
| Algorithm 1: Best forwarder selection algorithm |
| Input: List of requesting nodes , forwarder list , Output: Forwarder of 1: Find , for each i M 2: Calculate delay , for each 3: Calculate stability , for each 4: if ( has packets to send) then 5: { 6: for every j , compute by providing high weight to 7: forwarder 8: } 9: end if 10: if ( has packets to send) then 11: { 12: for each j , compute by providing a higher weight to 13: forwarder 14: } 15: end if |
- 5.
- Improved firefly optimization (IFO) algorithm.
3.4. DRL-Based Emergency Message Dissemination
3.4.1. Delay Deep Deterministic Policy Gradient Algorithm
3.4.2. Light Gradient Boosting Machine (LGBM) Algorithm
4. Experimental Results
4.1. Simulation Setup
4.2. Comparative Analysis
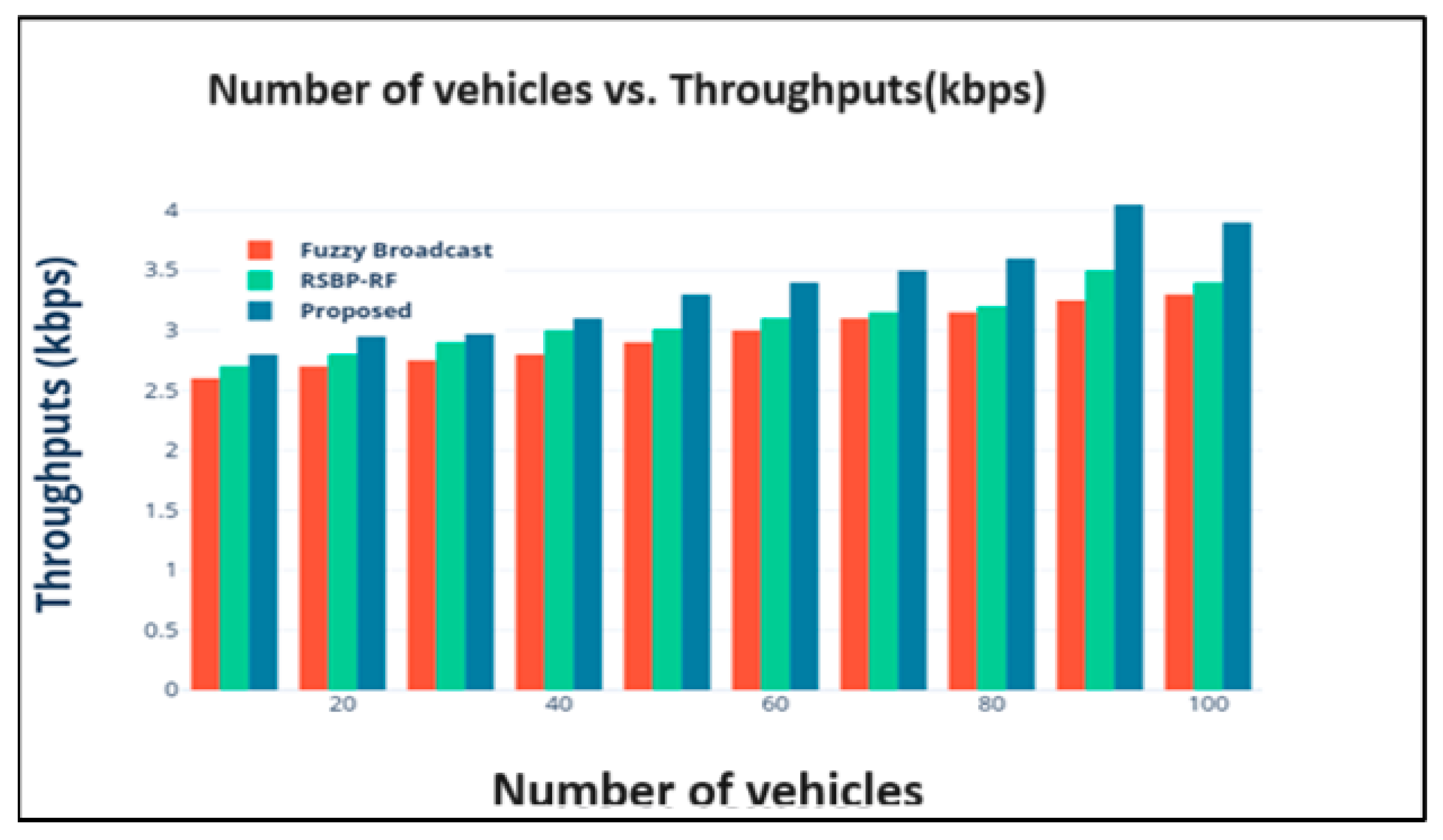
4.2.1. Number of Vehicles vs. Throughput
4.2.2. Vehicle Density vs. End-to-End Delay
4.2.3. Vehicle Density vs. Coverage
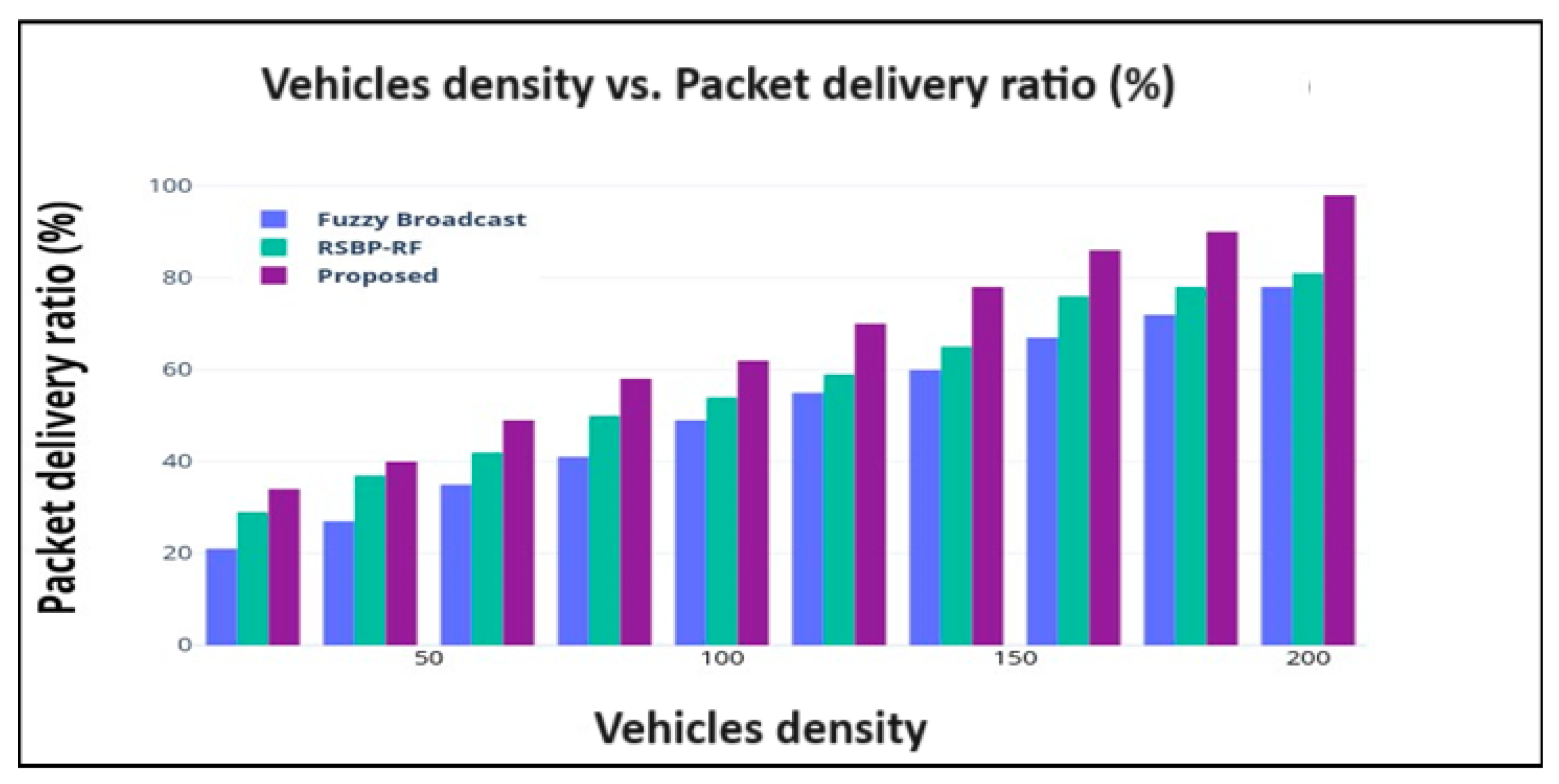
4.2.4. Vehicle Density vs. Packet Delivery Ratio
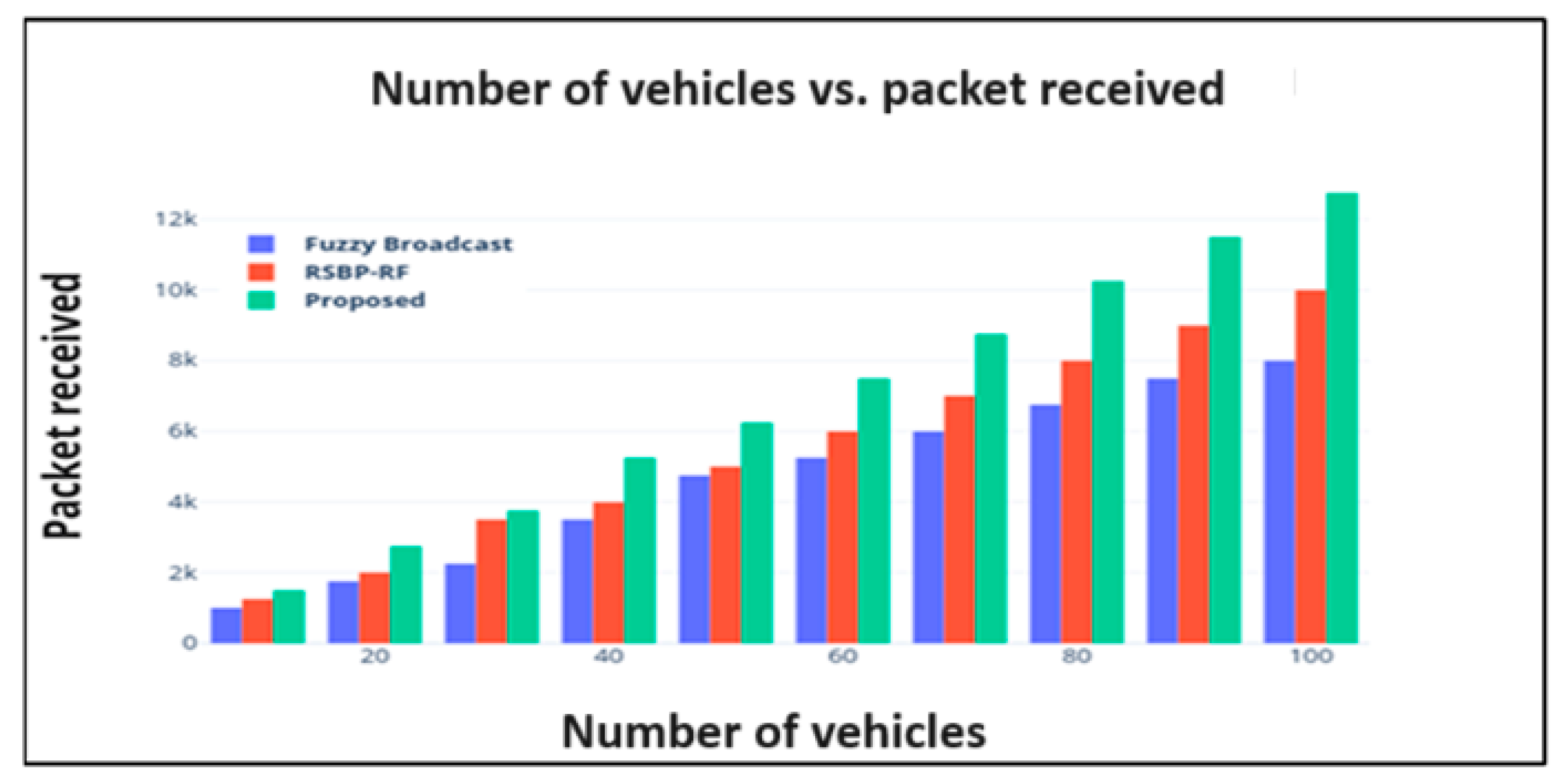
4.2.5. Number of Vehicles vs. Packet Received
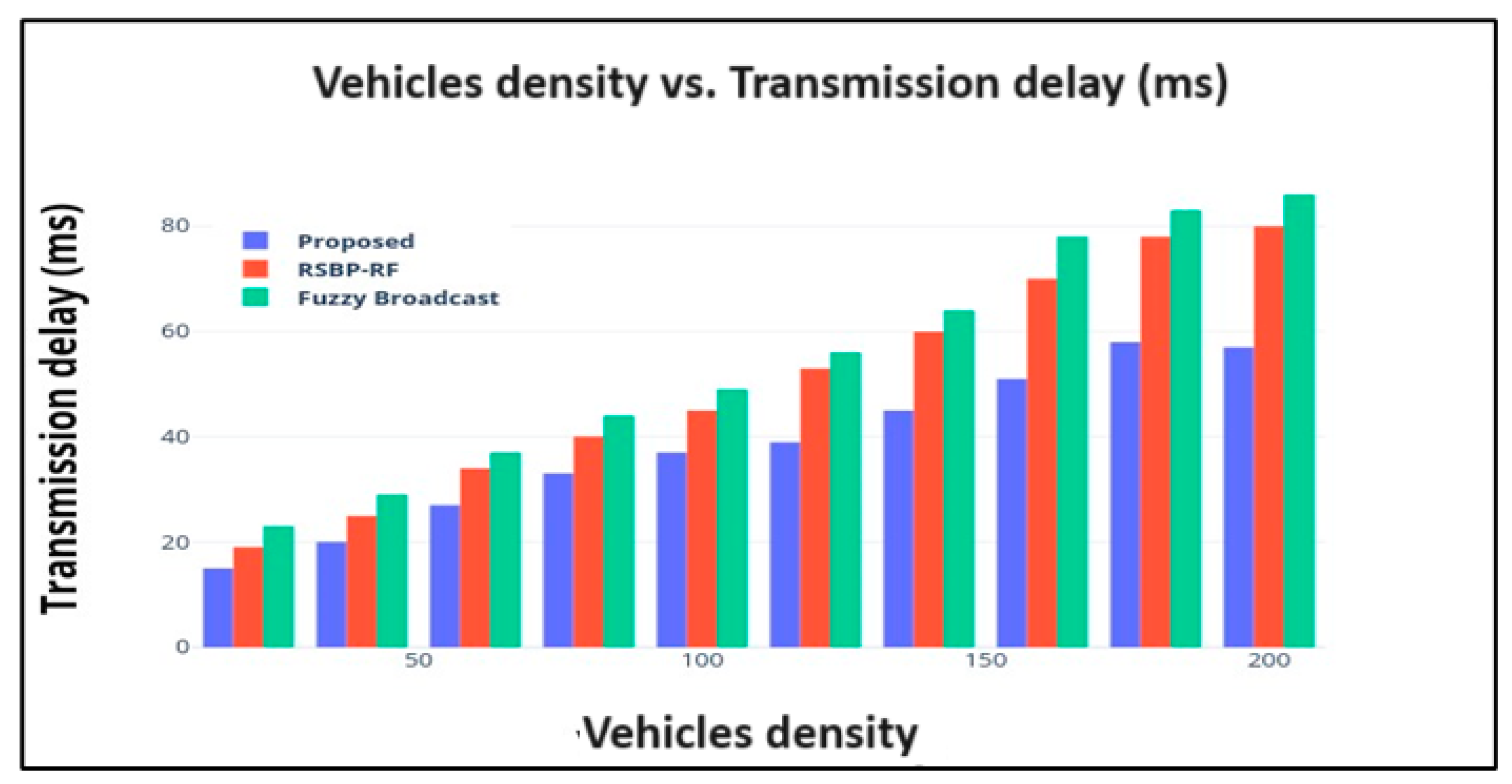
4.2.6. Vehicles Density vs. Transmission Delay
4.3. Research Summary
Confidence Interval
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ullah, S.; Abbas, G.; Abbas, Z.H.; Waqas, M.; Ahmed, M. RBO-EM: Reduced broadcast overhead scheme for emergency message dissemination in VANETs. IEEE Access 2020, 8, 175205–175219. [Google Scholar] [CrossRef]
- Afrashteh, M.; Babaie, S. A route segmented broadcast protocol based on RFID for emergency message dissemination in vehicular ad-hoc networks. IEEE Trans. Veh. Technol. 2020, 69, 16017–16026. [Google Scholar] [CrossRef]
- Marques, M.; Senna, C.; Sargento, S. Evaluation of strategies for emergency message dissemination in vanets. In Proceedings of the 2020 IEEE Symposium on Computers and Communications (ISCC), Rennes, France, 7–10 July 2020; pp. 1–6. [Google Scholar]
- Ayaz, F.; Sheng, Z.; Tian, D.; Liang, G.Y.; Leung, V. A voting blockchain based message dissemination in vehicular ad-hoc networks (VANETs). In Proceedings of the ICC 2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Desai, D.; El-Ocla, H.; Purohit, S. Data Dissemination in VANETs Using Particle Swarm Optimization. Sensors 2023, 23, 2124. [Google Scholar] [CrossRef] [PubMed]
- Basha, S.K.; Shankar, T.N. Fuzzy logic based forwarder selection for efficient data dissemination in VANETs. Wirel. Netw. 2021, 27, 2193–2216. [Google Scholar] [CrossRef]
- Balamurugan, A.; Priya, M.D.; Malar, A.C.J.; Janakiraman, S. Raccoon optimization algorithm-based accurate positioning scheme for reliable emergency data dissemination under NLOS situations in VANETs. J. Ambient Intell. Humaniz. Comput. 2021, 12, 10405–10424. [Google Scholar] [CrossRef]
- Rehman, O.; Ould-Khaoua, M. A hybrid relay node selection scheme for message dissemination in VANETs. Future Gener. Comput. Syst. 2019, 93, 1–17. [Google Scholar] [CrossRef]
- Moni, S.S.; Manivannan, D. A scalable and distributed architecture for secure and privacy-preserving authentication and message dissemination in VANETs. Internet Things 2021, 13, 100350. [Google Scholar] [CrossRef]
- Rizwan, S.; Husnain, G.; Aadil, F.; Ali, F.; Lim, S. Mobile Edge-based Information-Centric Network for emergency messages dissemination in Internet of Vehicles: A Deep Learning Approach. IEEE Access 2023, 11, 62574–62590. [Google Scholar] [CrossRef]
- Chakroun, R.; Abdellatif, S.; Villemur, T. LAMD: Location-based Alert Message Dissemination scheme for emerging infrastructure-based vehicular networks. Internet Things 2022, 19, 100510. [Google Scholar] [CrossRef]
- Selvi, M.; Ramakrishnan, B. Lion optimization algorithm (LOA)-based reliable emergency message broadcasting system in VANET. Soft Comput. 2020, 24, 10415–10432. [Google Scholar] [CrossRef]
- Alghamdi, S.A. Novel path similarity aware clustering and safety message dissemination via mobile gateway selection in cellular 5G-based V2X and D2D communication for urban environment. Ad Hoc Netw. 2020, 103, 102150. [Google Scholar] [CrossRef]
- Ramya Devi, M.; Jasmine Selvakumari Jeya, I.; Lokesh, S. Adaptive scheduled partitioning technique for reliable emergency message broadcasting in VANET for intelligent transportation systems. Automatika 2023, 64, 341–354. [Google Scholar] [CrossRef]
- Meenaakshi Sundhari, R.P.; Murali, L.; Baskar, S.; Shakeel, P.M. MDRP: Message dissemination with re-route planning method for emergency vehicle information exchange. Peer-Peer Netw. Appl. 2021, 14, 2285–2294. [Google Scholar] [CrossRef]
- Gupta, N.; Prakash, A.; Tripathi, R. Adaptive beaconing in mobility aware clustering based MAC protocol for safety message dissemination in VANET. Wirel. Commun. Mob. Comput. 2017, 1, 1246172. [Google Scholar] [CrossRef]
- Li, P.; Zeng, Y.; Li, C.; Chen, L.; Wang, H.; Chen, C. A Probabilistic broadcasting scheme for emergent message dissemination in urban internet of vehicles. IEEE Access 2021, 9, 13187–113198. [Google Scholar] [CrossRef]
- Farooq, W.; Islam, S.U.; Khan, M.A.; Rehman, S.; Gulzari, U.A.; Boudjadar, J. UGAVs-MDVR: A Cluster-Based Multicast Routing Protocol for Unmanned Ground and Aerial Vehicles Communication in VANET. Appl. Sci. 2022, 12, 11995. [Google Scholar] [CrossRef]
- Al-Obaidi, A.S.; Jubair, M.A.; Aziz, I.A.; Ahmad, M.R.; Mostafa, S.A.; Mahdin, H.; Al-Tickriti, A.T.; Hassan, M.H. Cauchy Density-based Algorithm for VANETs Clustering in 3D Road Environments. IEEE Access 2022, 10, 76376–76385. [Google Scholar] [CrossRef]
- Huang, S.; Huang, C.; Wu, D.; Yin, Y.; Ashraf, M.; Fu, B. Efficient Message Dissemination on Curve Road in Vehicular Networks. Wirel. Commun. Mob. Comput. 2022, 2022, 6836268. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, F.; Weng, J.; Cao, K.; Miao, Y.; Guo, J.; Wu, Y. BTMPP: Balancing trust management and privacy preservation for emergency message dissemination in vehicular networks. IEEE Internet Things J. 2020, 8, 5386–5407. [Google Scholar] [CrossRef]
- Liu, Z.; Weng, J.; Guo, J.; Ma, J.; Huang, F.; Sun, H.; Cheng, Y. PPTM: A privacy-preserving trust management scheme for emergency message dissemination in space–air–ground-integrated vehicular networks. IEEE Internet Things J. 2021, 9, 5943–5956. [Google Scholar] [CrossRef]
- Mistareehi, H.; Manivannan, D. A low-overhead message authentication and secure message dissemination scheme for vanets. Network 2022, 2, 139–152. [Google Scholar] [CrossRef]
- Javed, M.U.; Jamal, A.; Alkhammash, E.H.; Hadjouni, M.; Bahaj, S.A.; Javaid, N. Secure message handling in vehicular energy networks using blockchain and artificially intelligent IPFS. IEEE Access 2022, 10, 82063–82075. [Google Scholar] [CrossRef]
- Galeana-Zapién, H.; Morales-Sandoval, M.; Leyva-Vázquez, C.A.; Rubio-Loyola, J. Smartphone-based platform for secure multi-hop message dissemination in VANETs. Sensors 2020, 20, 330. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Liu, F.; Zhao, Z.; Karimzadeh, M. Effective safety message dissemination with vehicle trajectory predictions in V2X networks. Sensors 2022, 22, 2686. [Google Scholar] [CrossRef] [PubMed]
- Azzaoui, N.; Korichi, A.; Brik, B.; Fekair, M.E.A. Towards optimal dissemination of emergency messages in Internet of Vehicles: A dynamic clustering-based approach. Electronics 2021, 10, 979. [Google Scholar] [CrossRef]
- Rajasekar, R.; Sivakumar, P. A Cloud-Based Secure Emergency Message Dissemination Scheme in Vehicular Adhoc Networks. Intell. Autom. Soft Comput. 2022, 33, 117–131. [Google Scholar] [CrossRef]
- Nozari, M.; Hendessi, F.; Khiadani, N.H.; Kachooei, M.A. Using Overhearing and Rateless Coding in Disseminating Various Messages in Vehicular AdHoc Networks. IEEE Access 2021, 9, 125052–125064. [Google Scholar] [CrossRef]
- Vinita, L.J.; Vetriselvi, V. Federated Learning-based Misbehaviour detection on an emergency message dissemination scenario for the 6G-enabled Internet of Vehicles. Ad Hoc Netw. 2023, 144, 103153. [Google Scholar] [CrossRef]
- Lim, J.; Pyun, D.; Choi, D.; Bok, K.; Yoo, J. Efficient Dissemination of Safety Messages in Vehicle Ad Hoc Network Environments. Appl. Sci. 2023, 13, 6391. [Google Scholar] [CrossRef]
- Shah, M.A.; Zeeshan Khan, F.; Abbas, G.; Abbas, Z.H.; Ali, J.; Aljameel, S.S.; Khan, I.U.; Aslam, N. Optimal path routing protocol for warning messages dissemination for highway VANET. Sensors 2022, 22, 6839. [Google Scholar] [CrossRef] [PubMed]
- Chakroun, R.; Abdellatif, S.; Villemur, T. Q-learning relay placement for alert message dissemination in vehicular networks. Procedia Comput. Sci. 2022, 203, 222–230. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware specifications | Hard disk | 300 GB |
| RAM | 4 GB | |
| Software specifications | Simulation tools | OMNET++, SUMO |
| Processor | Intel(R) core™ i5-4590S [email protected] GHZ | |
| OS | Windows 10 Pro |
| Parameters | Values |
|---|---|
| Version of OMNET++ | OMNET++ 4.6 |
| Version of SUMO | SUMO 0.19.0 |
| Number of repetitions | 4 |
| Number of vehicles | 100 |
| Blockchain node | 1 |
| Number of ERSU | 4 |
| Controller | 3 |
| TAS | 4 |
| Log collector | 1 |
| Vehicle acceleration | 3.5 m/s2 |
| Packet interval | 2 s |
| Generated packet number | 100 |
| Packet size | 512 |
| Number of packets | ~5000 |
| Data rate | Max 2 kbps |
| Simulation time | 500 s |
| Transmission power | 10 mW |
| Rate of transmission | 18 Mbps |
| Bandwidth | 10 MHz |
| Simulation area | 2750 m × 2250 m |
| Software between networks | TraCIDemoRSU11p in omnetpp.ini |
| Comparison Metrics | Proposed | Fuzzy Broadcast | Multi-Lane mmWave | RSBP-RF |
|---|---|---|---|---|
| Throughput (kbps) | 3.9 | 3.3 | - | 3.4 |
| End-to-end delay | 70 | - | 90 | 87 |
| Coverage (%) | 90 | -- | 59 | 70 |
| Packet delivery ratio (%) | 98 | 78 | -- | 81 |
| Packet received | 12.75 k | 8 k | -- | 1 k |
| Transmission delay (ms) | 57 | 86 | -- | 80 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Albeyar, M.A.; Smaoui, I.; Mnif, H.; Alani, S. Proposed Supercluster-Based UMBBFS Routing Protocol for Emergency Message Dissemination in Edge-RSU for 5G VANET. Computers 2024, 13, 208. https://doi.org/10.3390/computers13080208
Albeyar MA, Smaoui I, Mnif H, Alani S. Proposed Supercluster-Based UMBBFS Routing Protocol for Emergency Message Dissemination in Edge-RSU for 5G VANET. Computers. 2024; 13(8):208. https://doi.org/10.3390/computers13080208
Chicago/Turabian StyleAlbeyar, Maath A., Ikram Smaoui, Hassene Mnif, and Sameer Alani. 2024. "Proposed Supercluster-Based UMBBFS Routing Protocol for Emergency Message Dissemination in Edge-RSU for 5G VANET" Computers 13, no. 8: 208. https://doi.org/10.3390/computers13080208