
Comparison of the Low-Velocity Impact Responses and Compressive Residual Strengths of GLARE and a 3DFML

Abstract
:1. Introduction
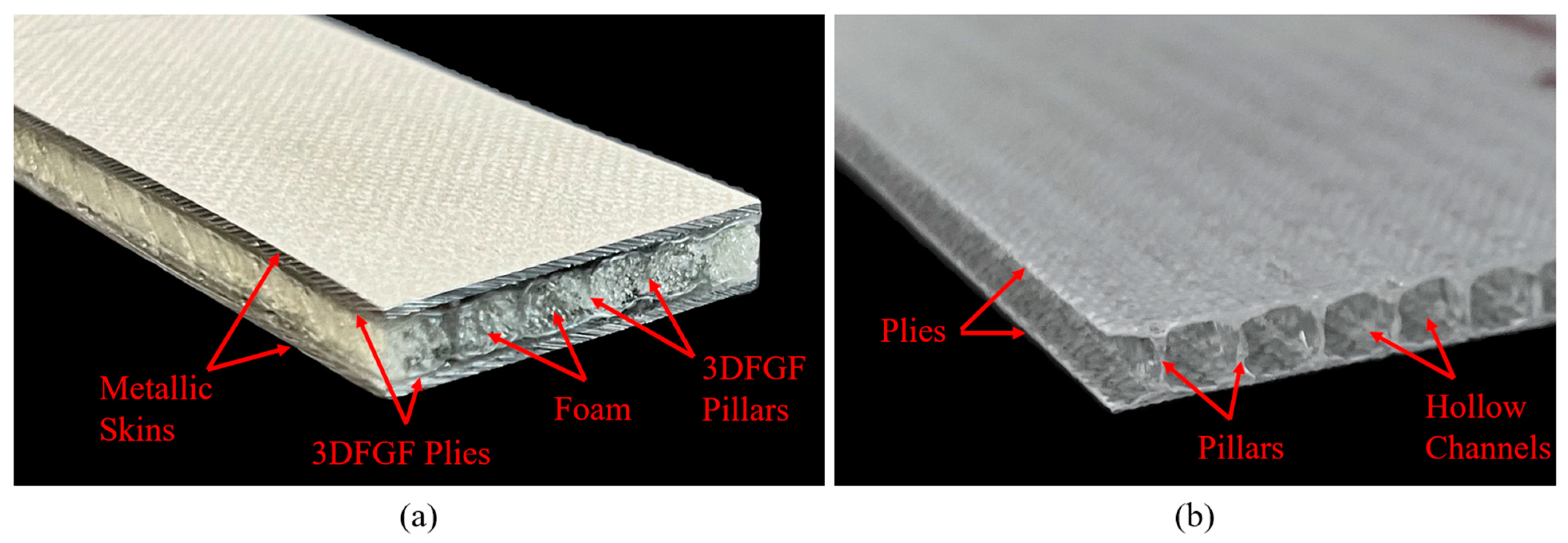
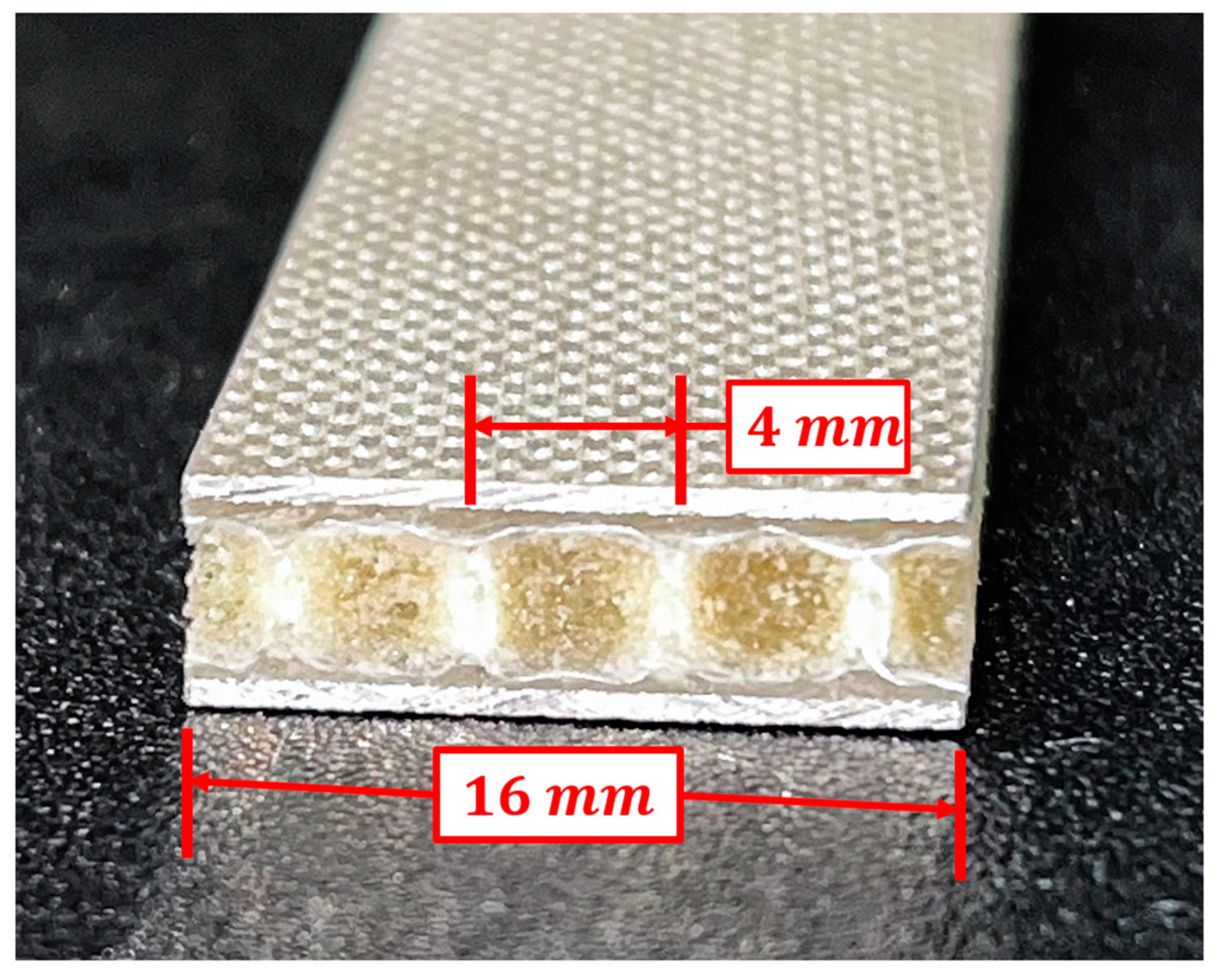
2. Materials
3. Experiments
3.1. Impact Testing Setup
3.2. Micro-CT Scanning
3.3. CAI Test
3.4. Compression Response of the Virgin (Undamaged) Specimens
4. Numerical Simulations
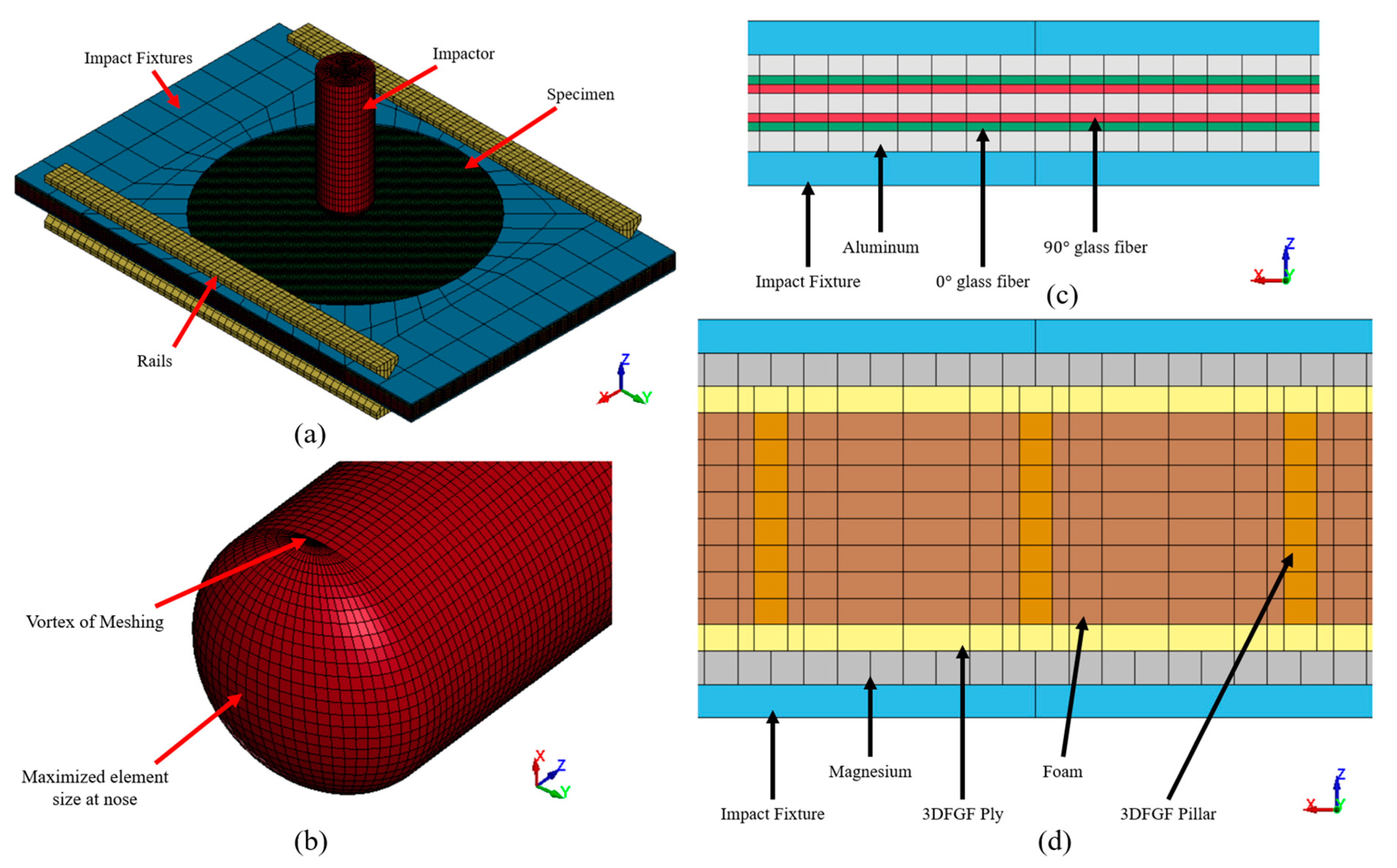
4.1. FE Models
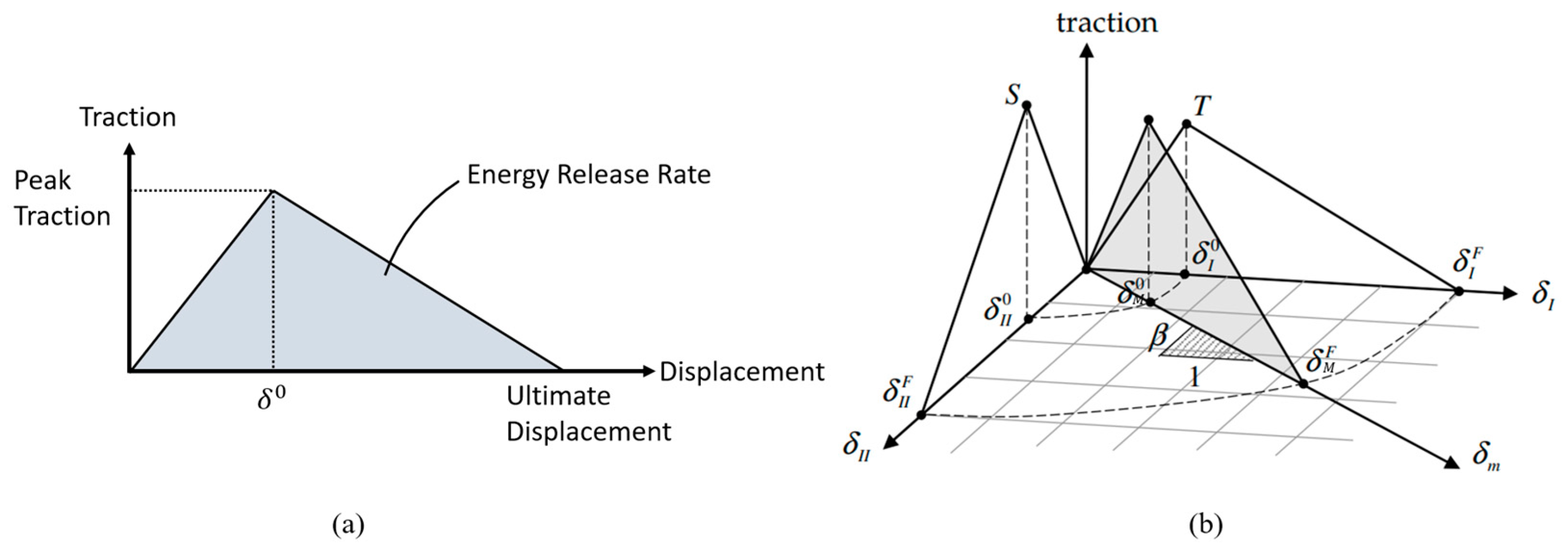
4.2. Material Models
- —
- When the DFAILT parameter is set to zero, the element is deemed to have failed when the tension failure mode is met based on the Chang-Chang stress-based criteria.
- —
- When DFAILT is set to a non-zero value, the element is deemed to have failed if the strain in any direction becomes greater than the defined DFAILT, DFAILC, DFAILM, and DFAILS limits.
- —
- When EFS is set to a positive value, the element is deemed to have failed if the effective strain in the element becomes larger than the set effective failure strain (EFS). EFS is calculated using the ultimate normal and shearing strains.
- —
- When the timestep size criteria for element deletion (TFAIL) is set to a positive value (0 < TFAIL ≤ 1), the element is deemed to have failed when the element timestep is smaller than TFAIL. Conversely, if TFAIL is set greater than 1, the element is deleted when the ratio of the original timestep over the current timestep becomes less than TFAIL.
4.3. Contact Modelling
4.4. Compression Analysis
4.5. Numerical Analysis Control Parameters
5. Results and Discussion
5.1. Results and Discussion
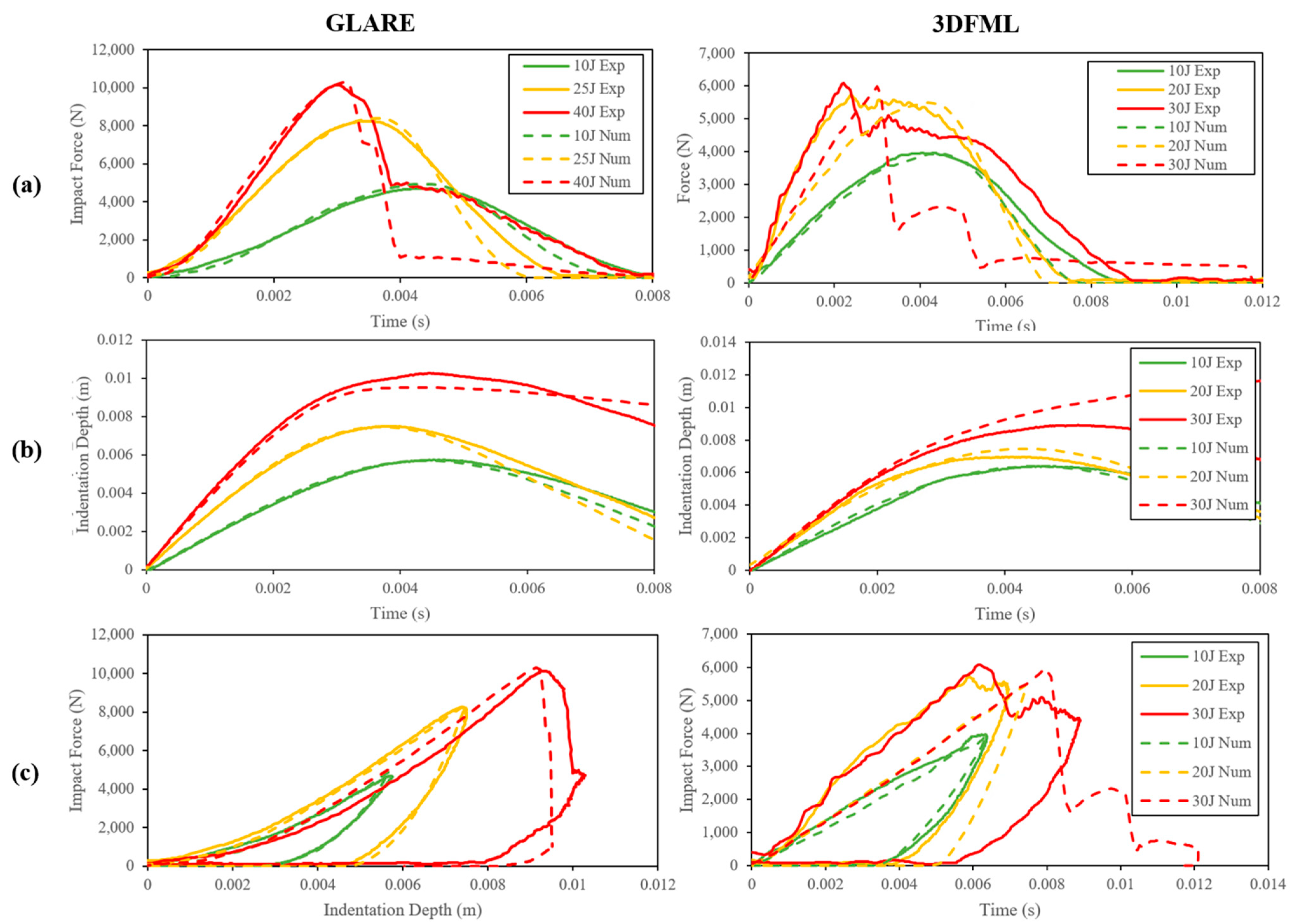
5.1.1. Experimental Results
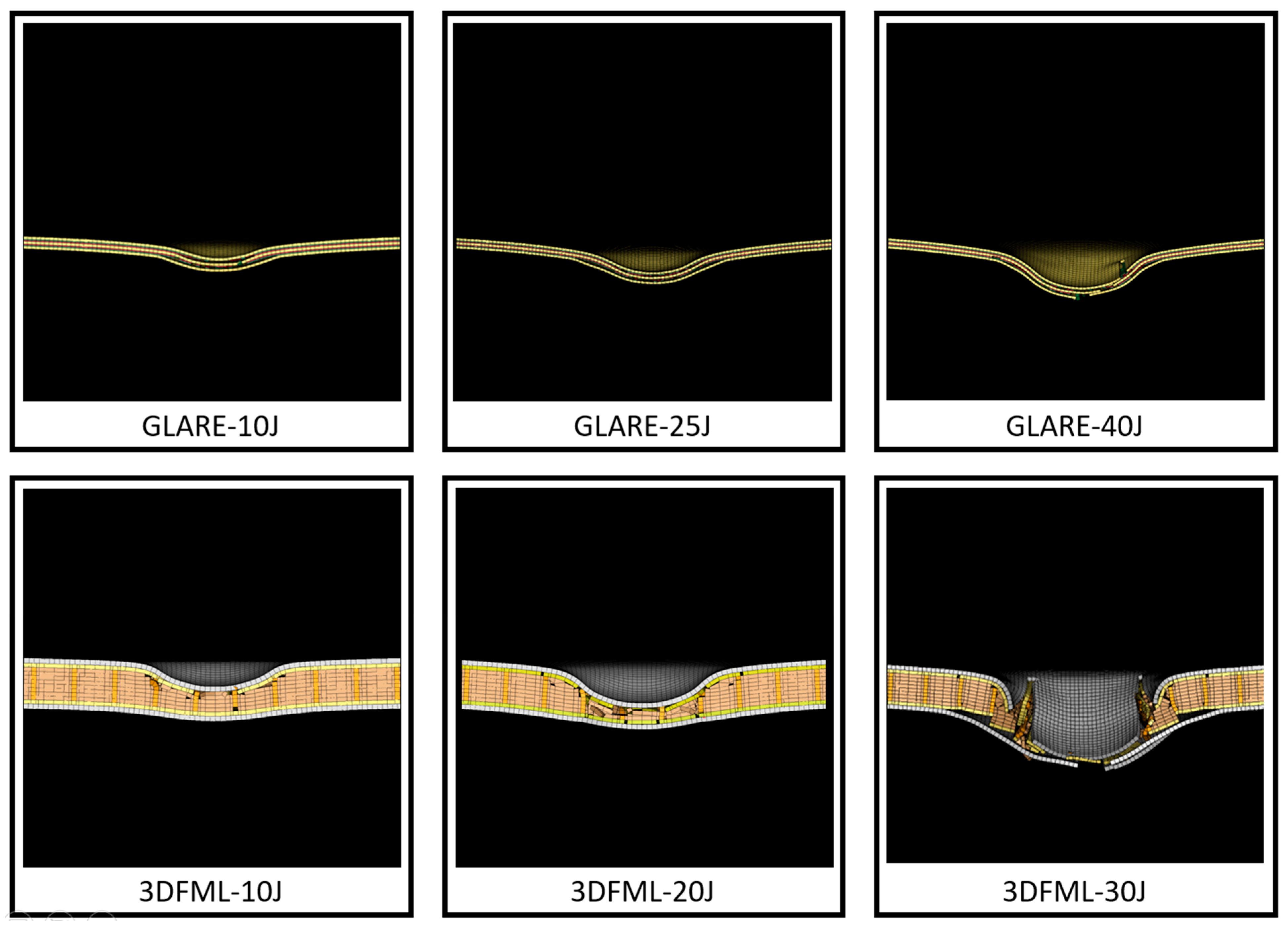
5.1.2. Numerical Results
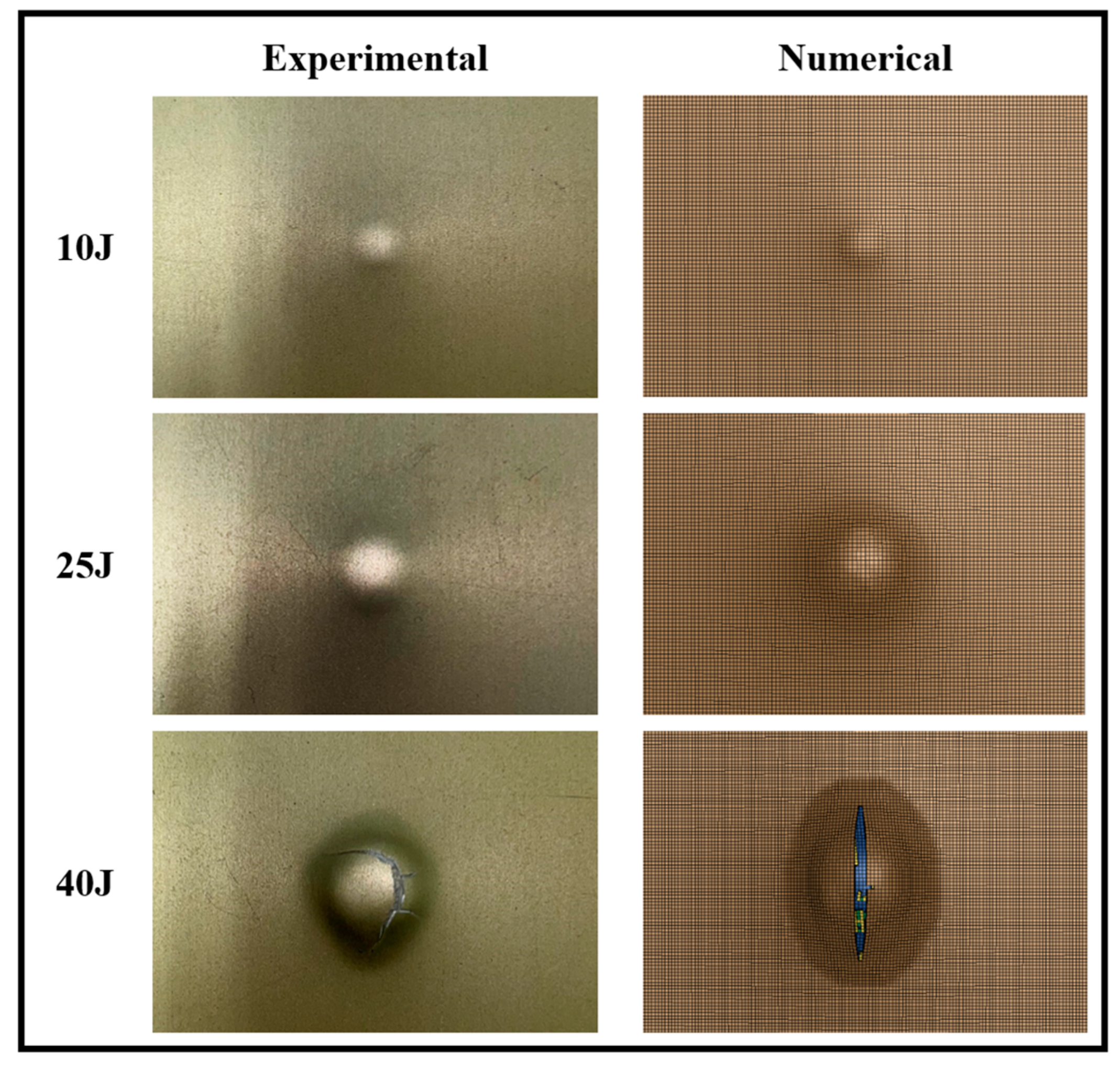
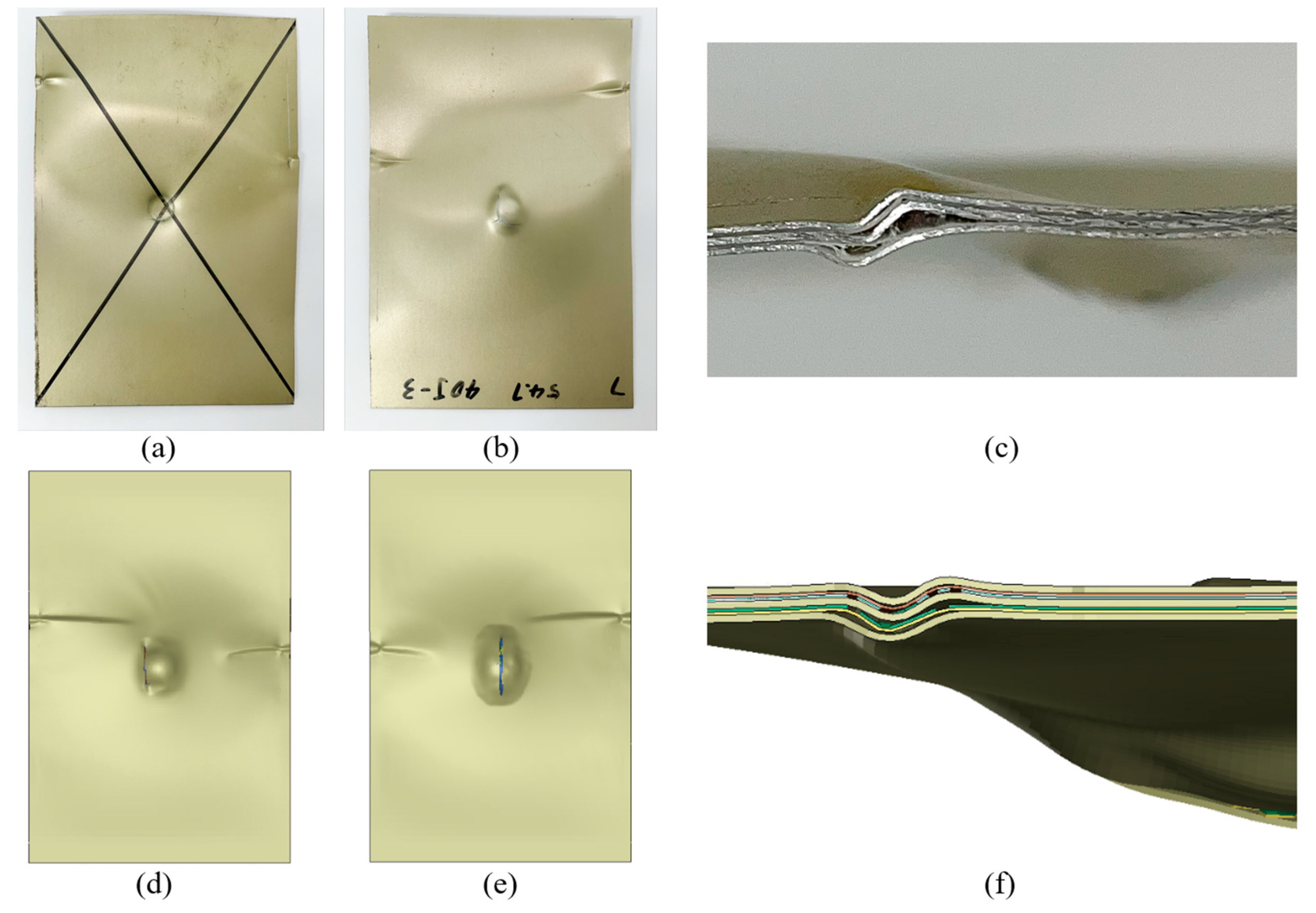
5.2. Post-Impact Inspection
5.3. Residual Strength
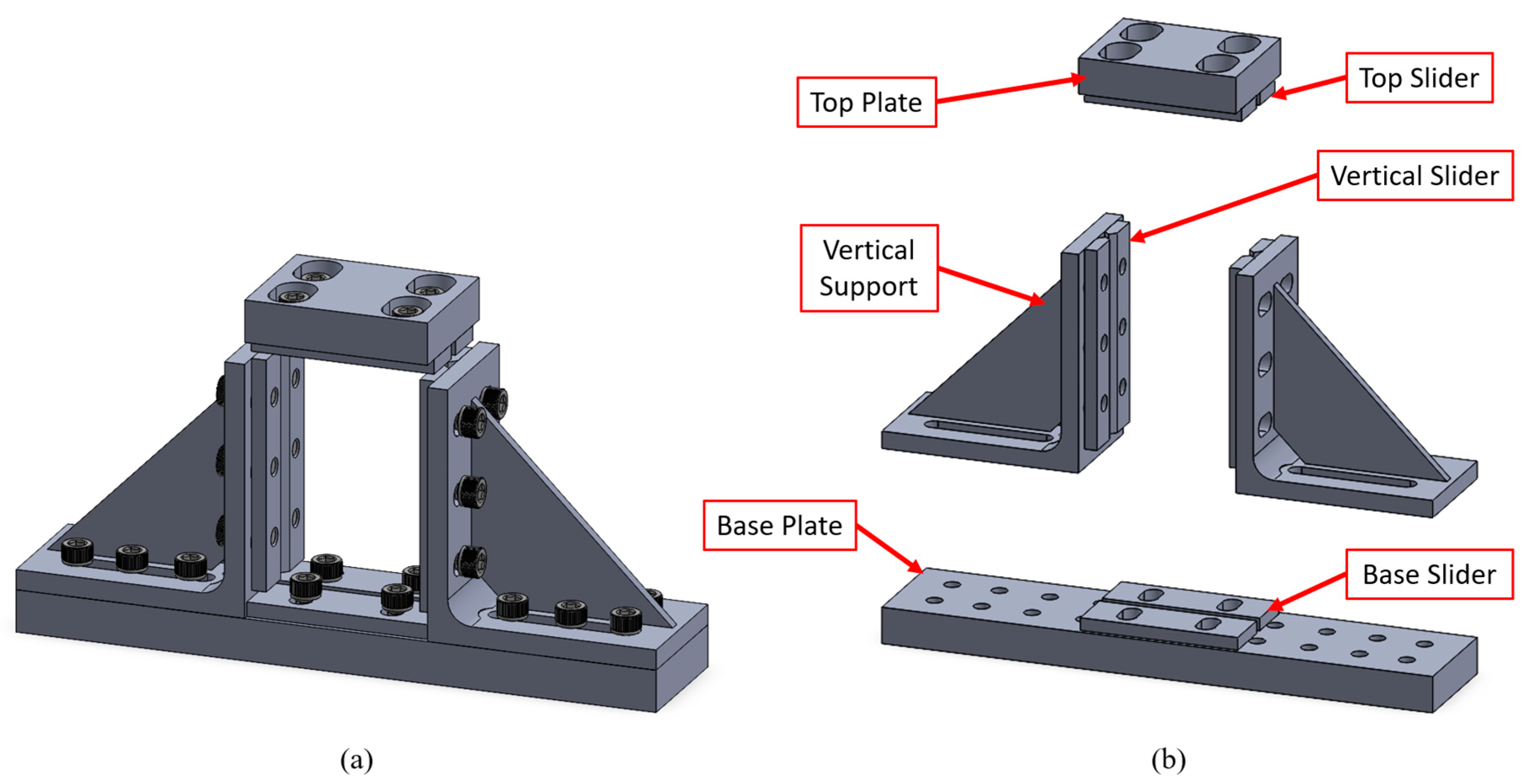
5.3.1. Modification of the Test Fixture
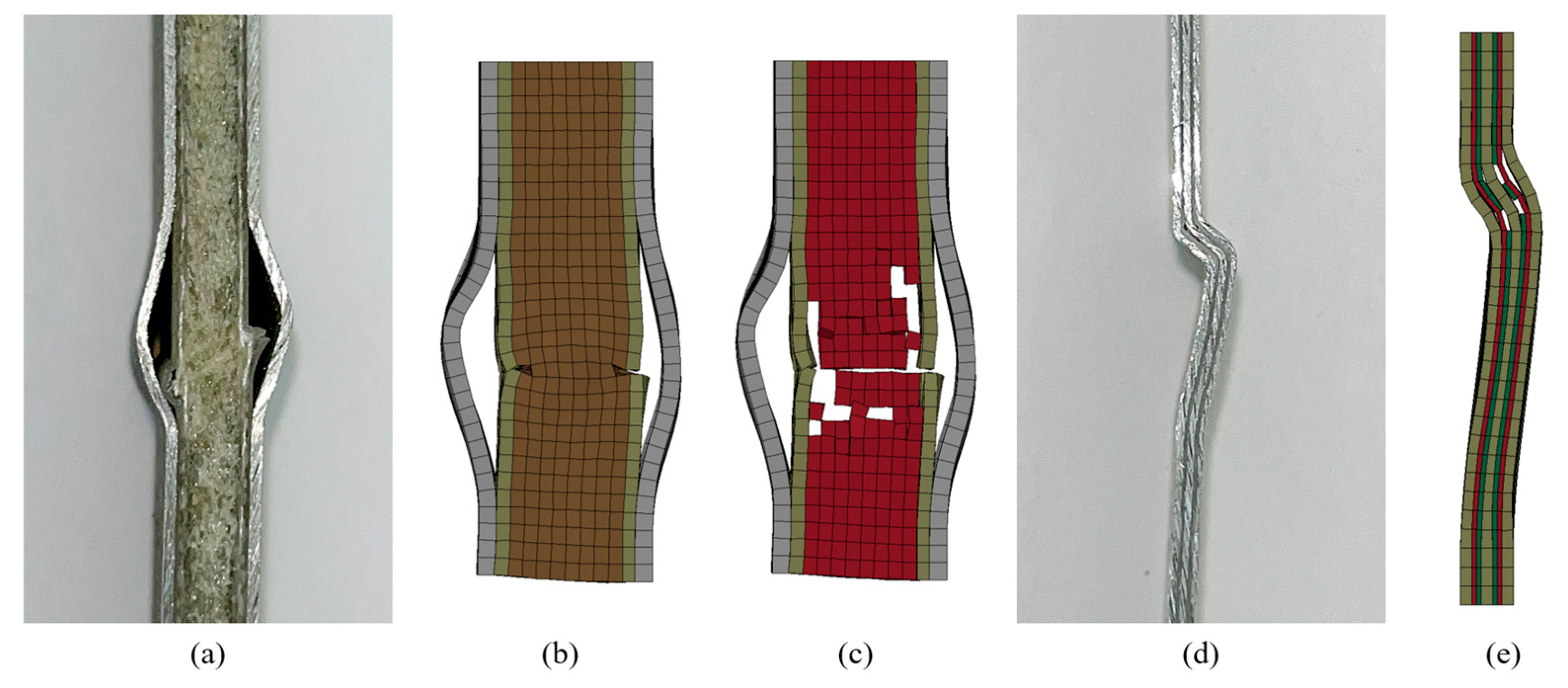
5.3.2. CAI Failure Modes
6. Conclusions
- The CAI performance of GLARE and 3DFML was successfully evaluated using ASTM D7137 guidelines; however, minor modifications had to be applied to the standard test fixture.
- Micro-CT scans were found to be an effective and worthy non-destructive inspection technique for observing internal damage in such complex hybrid material systems.
- The impact energy levels ranged from low to high, with the selection of high-impact energy close to each material system’s perforation threshold, which was established by numerical simulations.
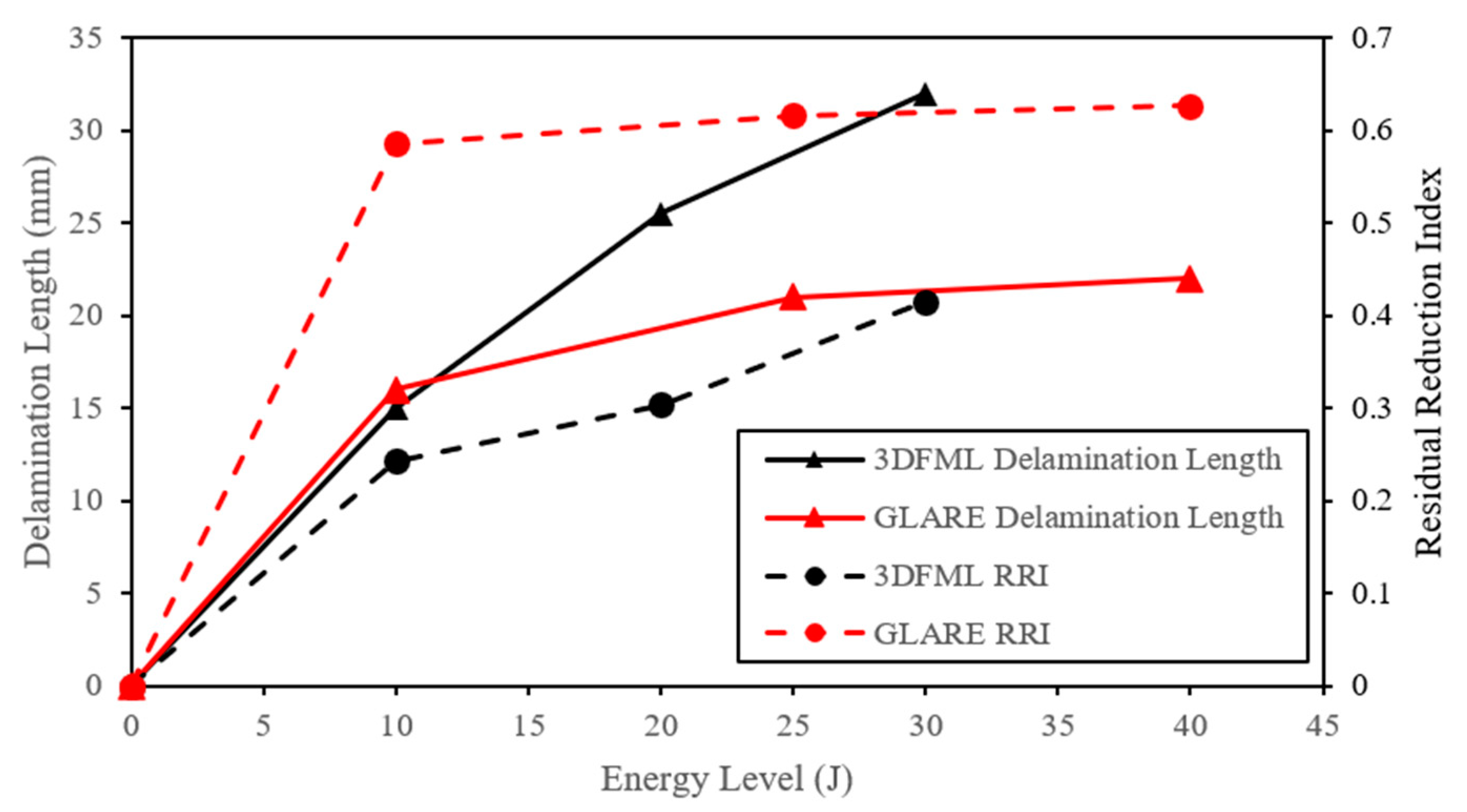
- The impacted GLARE and 3DFML specimens lost approximately 60% and 40% of their original compressive load-carrying capacity, respectively. GLARE’s significant loss of load capacity is attributed to its relatively small thickness.
- The developed numerical models predicted the impact and post-impact responses of both material systems accurately and effectively. In addition, the predicted failure modes closely matched the experimental results, confirming the integrity of the numerical models.
- The GLARE specimens showed better impact resistance and post-impact compressive load capacity compared to 3DFML; however, due to their large impact-induced deformations, their CAI residual capacity was closely comparable with 3DFMLs. Given the fact that 3DFML possesses comparatively significantly higher flexural properties, 3DFML is deemed to be an effective alternative to GLARE in various engineering applications.
- The developed numerical models were successfully used to establish the influences of the critical and limiting parameters that govern the post-impact compressive load capacity of 3DFML. The developed modelling framework can be effectively used to evaluate the response of different 3DFML configurations and optimize their impact resistance and CAI performance in the future.
- Two equations were proposed for calculating the Reduction in Residual Capacity and Residual Reduction Index. These simple equations can be used to relate the post-impact residual load capacity of real-world FML panels to the CAI performance of laboratory-size specimens. However, the universality of these equations should be further investigated.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sinmazçelik, T.; Avcu, E.; Bora, M.Ö.; Çoban, O. A Review: Fibre Metal Laminates, Background, Bonding Types and Applied Test Methods. Mater. Des. 2011, 32, 3671–3685. [Google Scholar] [CrossRef]
- Yaghoobi, H.; Mottaghian, F.; Taheri, F. Enhancement of Buckling Response of Stainless Steel-Based 3D-Fiber Metal Laminates Reinforced with Graphene Nanoplatelets: Experimental and Numerical Assessments. Thin-Walled Struct. 2021, 165, 107977. [Google Scholar] [CrossRef]
- Asaee, Z.; Taheri, F. Enhancement of Performance of Three-Dimensional Fiber Metal Laminates under Low Velocity Impact—A Coupled Numerical and Experimental Investigation. J. Sandw. Struct. Mater. 2019, 21, 2127–2153. [Google Scholar] [CrossRef]
- Asaee, Z.; Taheri, F. A Practical Analytical Model for Predicting the Low-Velocity Impact Response of 3D-Fiber Metal Laminates. Mech. Adv. Mater. Struct. 2020, 27, 20–33. [Google Scholar] [CrossRef]
- de Cicco, D.; Taheri, F. Performances of Magnesium- and Steel-Based 3D Fiber-Metal Laminates under Various Loading Conditions. Compos. Struct. 2019, 229, 111390. [Google Scholar] [CrossRef]
- de Cicco, D.; Taheri, F. Robust Numerical Approaches for Simulating the Buckling Response of 3D Fiber-Metal Laminates under Axial Impact—Validation with Experimental Results. J. Sandw. Struct. Mater. 2020, 22, 1564–1593. [Google Scholar] [CrossRef]
- Mottaghian, F.; Taheri, F. Effects of Surface Treatment on the Strength of Double-Strap Adhesively Bonded Joints Mating 3D-Fiber Metal Laminates. Mater. Lett. 2022, 324, 132698. [Google Scholar] [CrossRef]
- Mottaghian, F.; Taheri, F. Performance of a Unique Fiber-Reinforced Foam-Cored Metal Sandwich System Joined with Adhesively Bonded CFRP Straps Under Compressive and Tensile Loadings. Appl. Compos. Mater. 2022. [Google Scholar] [CrossRef]
- Mottaghian, F.; Taheri, F. On the Flexural Response of Nanoparticle-Reinforced Adhesively Bonded Joints Mating 3D-Fiber Metal Laminates—A Coupled Numerical and Experimental Investigation. Int. J. Adhes. Adhes. 2023, 120, 103278. [Google Scholar] [CrossRef]
- Sanchez-Saez, S.; Barbero, E.; Zaera, R.; Navarro, C. Compression after Impact of Thin Composite Laminates. Compos. Sci. Technol. 2005, 65, 1911–1919. [Google Scholar] [CrossRef] [Green Version]
- Dhaliwal, G.S.; Newaz, G.M. Compression after Impact Characteristics of Carbon Fiber Reinforced Aluminum Laminates. Compos. Struct. 2017, 160, 1212–1224. [Google Scholar] [CrossRef]
- Xiong, Y.; Poon, C.; Straznicky, P.V.; Vietinghoff, H. A Prediction Method for the Compressive Strength of Impact Damaged Composite Laminates. Compos. Struct. 1995, 30, 357–367. [Google Scholar] [CrossRef]
- de Freitas, M.; Reis, L. Failure Mechanisms on Composite Specimens Subjected to Compression after Impact. Compos. Struct. 1998, 42, 365–373. [Google Scholar] [CrossRef]
- ASTM D7137/D7137M-17; Standard Test Method for Compressive Residual Strength Properties of Damaged Polymer Matrix Composite Plates. ASTM International: West Conshohocken, PA, USA, 2017.
- ISO 18352:2009; Carbon-Fibre-Reinforced Plastics—Determination of Compression-after-Impact Properties at a Specified Impact-Energy Level. International Organization for Standardization: Geneva, Switzerland, 2009.
- ASTM D6641/D6641M-16e2; Standard Test Method for Compressive Properties of Polymer Matrix Composite Materials Using a Combined Loading Compression (CLC) Test Fixture. ASTM International: West Conshohocken, PA, USA, 2021.
- ASTM D7136/D7136M-20; Standard Test Method for Measuring the Damage Resistance of a Fiber-Reinforced Polymer Matrix Composite to a Drop-Weight Impact Event. ASTM International: West Conshohocken, PA, USA, 2020.
- Wang, H.; Chen, P.H.; Shen, Z. Experimental Studies on Compression-After-Impact Behaviour of Quasi-Isotropic Composite Laminates. Sci. Eng. Compos. Mater. 1997, 6, 19–36. [Google Scholar] [CrossRef]
- Vieille, B.; Casado, V.M.; Bouvet, C. Influence of Matrix Toughness and Ductility on the Compression-after-Impact Behavior of Woven-Ply Thermoplastic- and Thermosetting-Composites: A Comparative Study. Compos. Struct. 2014, 110, 207–218. [Google Scholar] [CrossRef]
- Ghelli, D.; Minak, G. Low Velocity Impact and Compression after Impact Tests on Thin Carbon/Epoxy Laminates. Compos. B Eng. 2011, 42, 2067–2079. [Google Scholar] [CrossRef]
- Rivallant, S.; Bouvet, C.; Hongkarnjanakul, N. Failure Analysis of CFRP Laminates Subjected to Compression after Impact: FE Simulation Using Discrete Interface Elements. Compos. Part. A Appl. Sci. Manuf. 2013, 55, 83–93. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Chen, Y.; Lee, J.; Fu, K.; Li, Y. In-Plane Compression Response of Woven CFRP Composite after Low-Velocity Impact: Modelling and Experiment. Thin-Walled Struct. 2021, 158, 107186. [Google Scholar] [CrossRef]
- Dwivedi, S.K.; Vishwakarma, M.; Soni, A. Advances and Researches on Non Destructive Testing: A Review. Mater. Today Proc. 2018, 5, 3690–3698. [Google Scholar] [CrossRef]
- Tan, K.T.; Watanabe, N.; Iwahori, Y. X-ray Radiography and Micro-Computed Tomography Examination of Damage Characteristics in Stitched Composites Subjected to Impact Loading. Compos. B Eng. 2011, 42, 874–884. [Google Scholar] [CrossRef]
- Elamin, M.; Li, B.; Tan, K.T. Impact Damage of Composite Sandwich Structures in Arctic Condition. Compos. Struct. 2018, 192, 422–433. [Google Scholar] [CrossRef]
- Hallquist, J.O. LS-DYNA Theory Manual; Livermore Software Technology: Livermore, CA, USA, 2006. [Google Scholar]
- Livermore Software Technology. LS-DYNA Keyword User’s Manual, R13 ed.; Livermore Software Technology: Livermore, CA, USA, 2021; Volume II. [Google Scholar]
- Livermore Software Technology. LS-DYNA Keyword User’s Manual, R13 ed.; Livermore Software Technology: Livermore, CA, USA, 2021; Volume I. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elastic Modulus | Poisson’s Ratio | Yield Strength | FAIL | ||
|---|---|---|---|---|---|
| Mg AZ31B-H24 | |||||
| Al 2024-T3 |
| Properties * | 3DFGF Biaxial Fabric | 3DFGF Pillars | UD S-Glass Prepreg |
|---|---|---|---|
| NFLS | PARAM | CT2CN | |||||
|---|---|---|---|---|---|---|---|
| 3DFML | |||||||
| GLARE |
| GLARE-3/2 | - | - | |||
| 3DFML | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Taheri, F. Comparison of the Low-Velocity Impact Responses and Compressive Residual Strengths of GLARE and a 3DFML. Polymers 2023, 15, 1723. https://doi.org/10.3390/polym15071723
Wang K, Taheri F. Comparison of the Low-Velocity Impact Responses and Compressive Residual Strengths of GLARE and a 3DFML. Polymers. 2023; 15(7):1723. https://doi.org/10.3390/polym15071723
Chicago/Turabian StyleWang, Ke, and Farid Taheri. 2023. "Comparison of the Low-Velocity Impact Responses and Compressive Residual Strengths of GLARE and a 3DFML" Polymers 15, no. 7: 1723. https://doi.org/10.3390/polym15071723