
Design and Development of a Side Spray Device for UAVs to Improve Spray Coverage in Obstacle Neighborhoods
Abstract
:1. Introduction
2. Materials and Methods
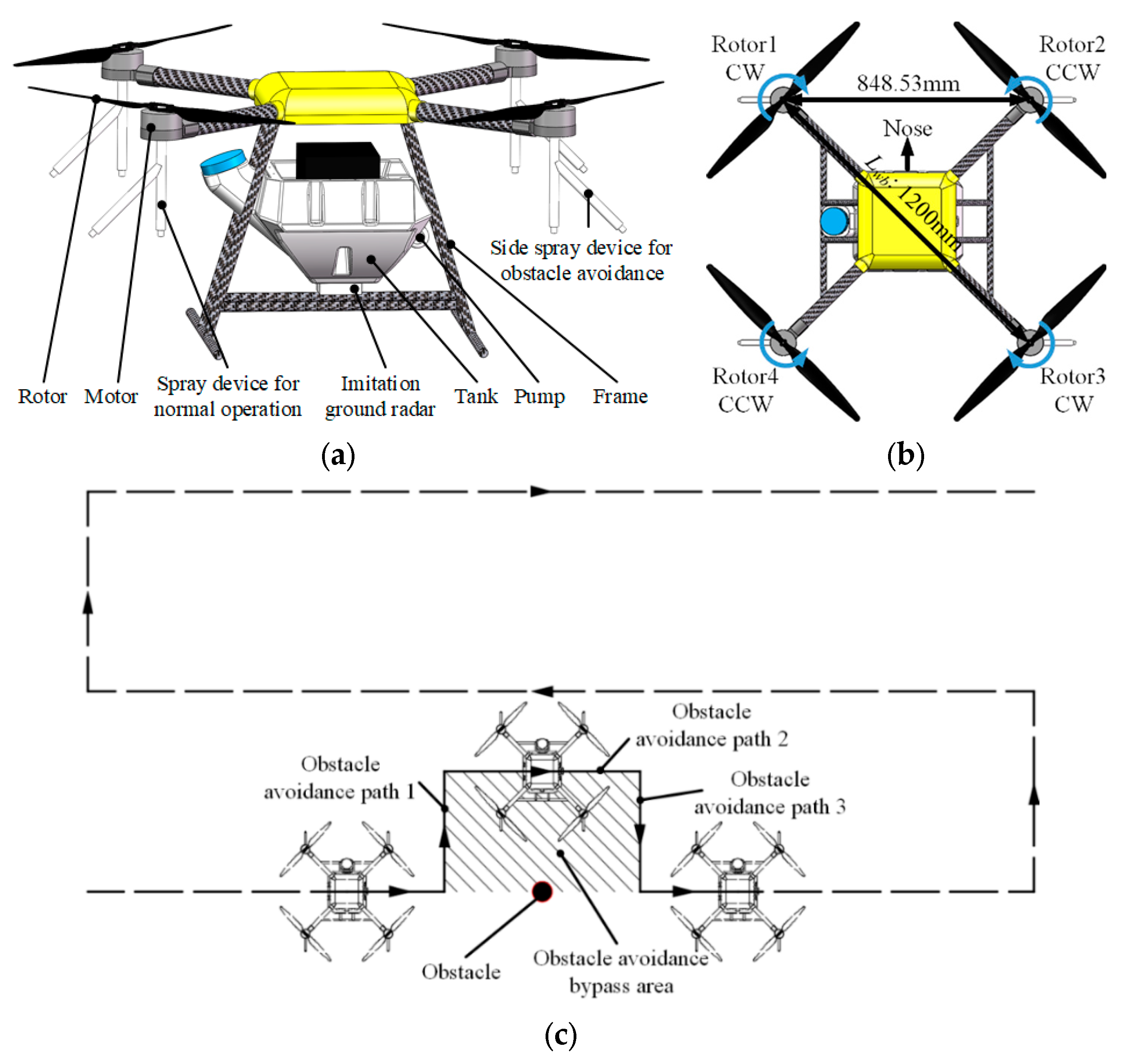
2.1. Side Spray Device Structure and Working Principle
2.2. UAV and Obstacle Relative Position Measurement Method
- (1)
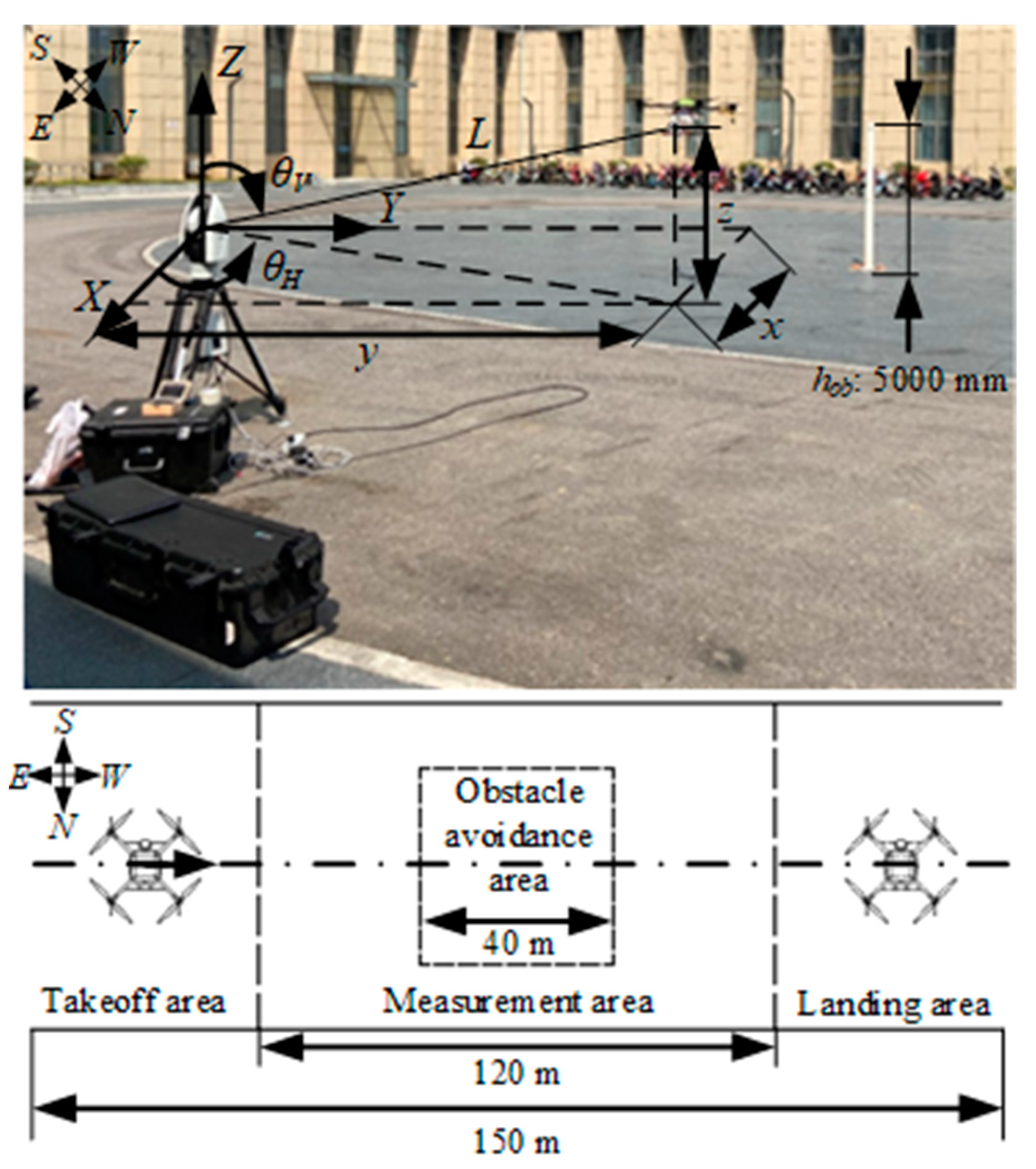
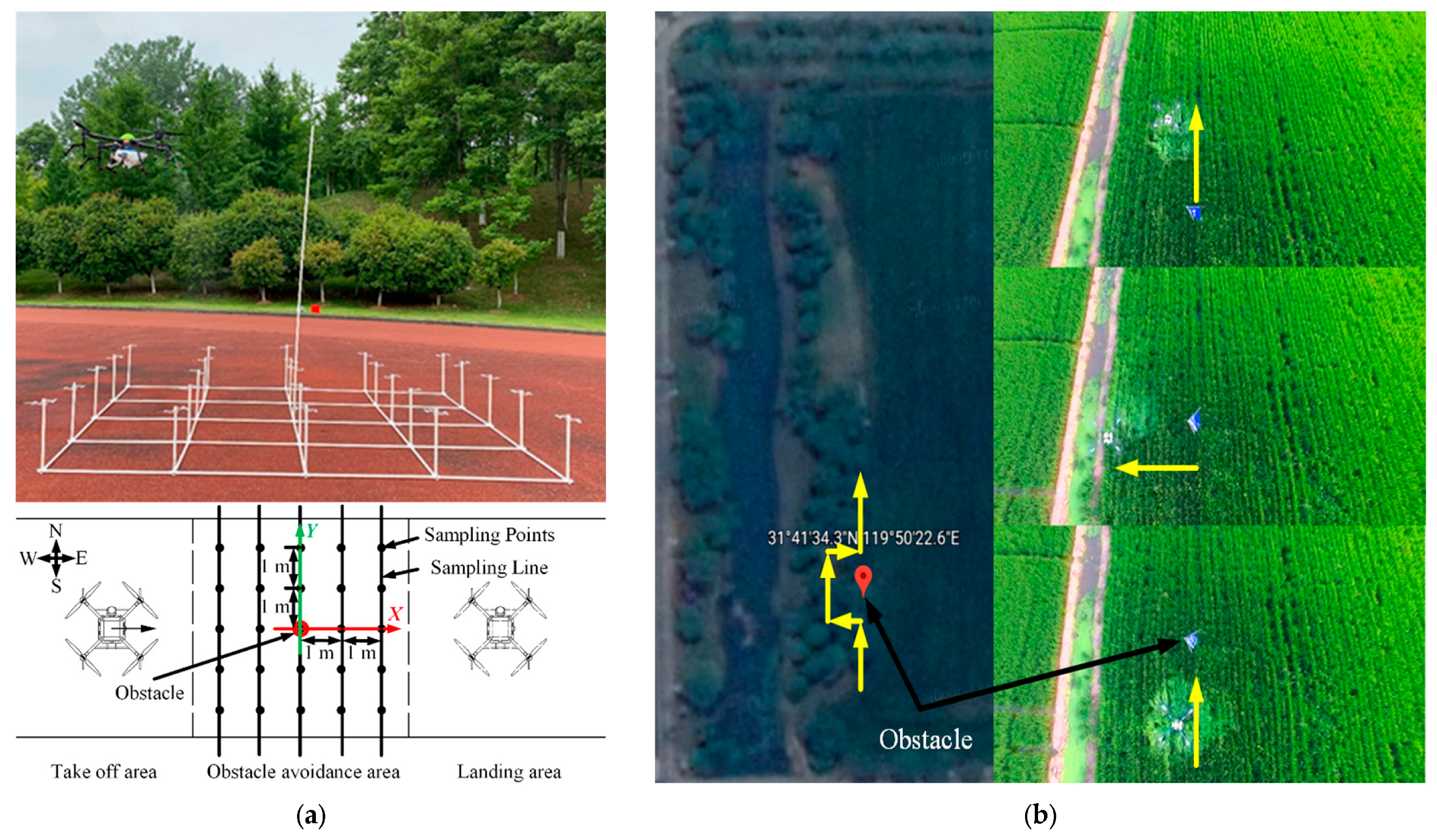
- As shown in Figure 3, the relative position measurement experiment between the UAV and obstacle was conducted at Jiangsu University, Zhenjiang City, Jiangsu Province, China (32°12′25.1″ N, 119°30′53.8″ E). A rectangular area of 150 m × 10 m was selected in the east–west direction. Additionally, the area was divided into a takeoff area, a measurement area, and a landing area. The length of the measurement area was 120 m. A flat area of 25 m × 5 m in the measurement area was selected as the obstacle avoidance area. A cylindrical obstacle with a height of 5 m and diameter of 0.11 m was arranged in the center of the obstacle avoidance area.
- (2)
- The Leica AT960-LR laser tracker measurement system was placed on the east edge of the east–west central axis of the rectangular area. The top coordinate of the obstacle was measured using the single-point measurement mode of the laser tracker and repeating the measurement three times. The average coordinates (xob, yob, zob) were taken as the top coordinates of the obstacle.
- (3)
- The UAV was placed on the central axis of the rectangular area in the east–west direction, facing west and flying from east to west. The take-off point of the UAV was 1 m away from the laser tracker, and the Leica 38.1 mm target ball was installed on the tail of the UAV.
- (4)
- In order to avoid the measurement error caused by manual operation, this experiment adopts the UAV obstacle avoidance system researched by our team for autonomous flight [38]. The starting and ending points of the UAV autonomous flight route were set along the east–west central axis of the rectangular area. The distance between the two points was 150 m.
- (5)
- After the UAV had taken off and reached stabilized hover at the starting point, the UAV performed autonomous flight according to the flight parameter combinations in Table 3. At the same time, the Leica AT960 measurement system continuously recorded the coordinates of the UAV with a 1000 Hz sampling rate. After the UAV reached the ending point, the laser tracker stopped recording data. The laser light between the laser tracker and target ball must remain uninterrupted during the whole process. Otherwise, the UAV returns to the starting point and restarts the experiment.
- (6)
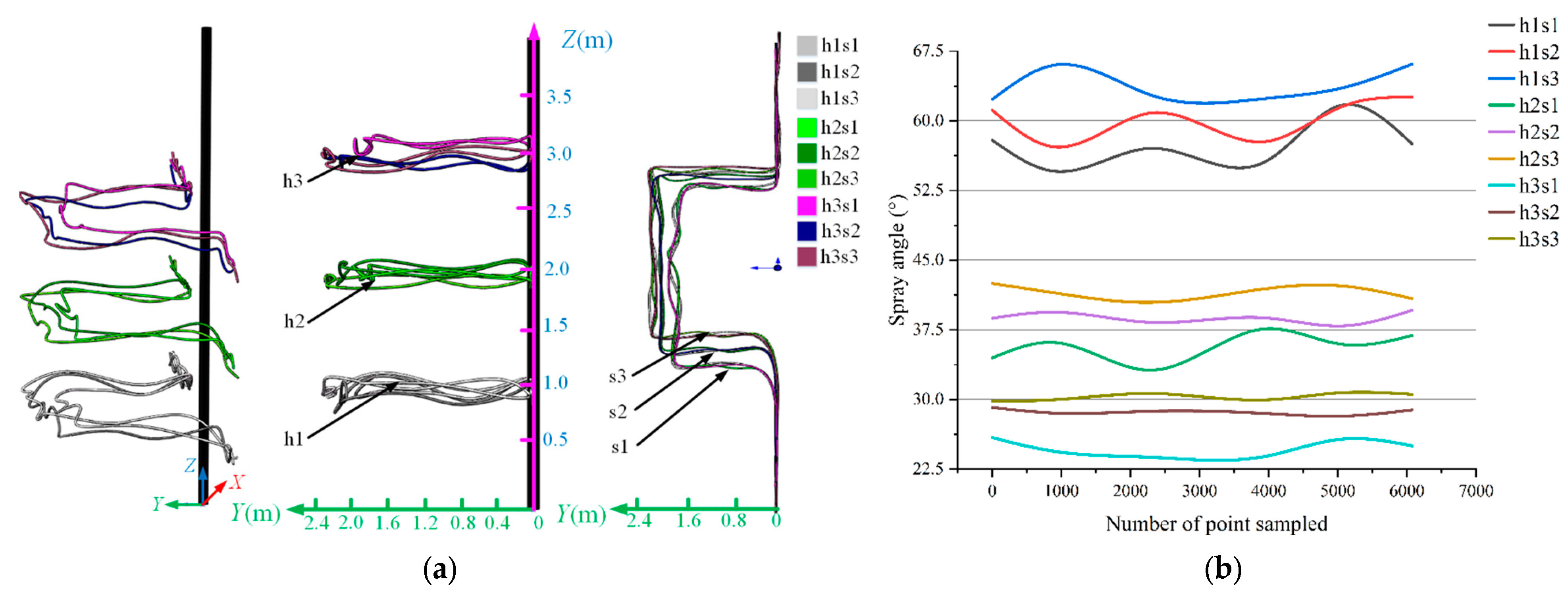
- Each flight parameter combination was measured three times and the average coordinates (xu, yu, zu) were taken as the flight trajectory points of the UAV. The obstacle avoidance paths were drawn according to the coordinates (xob, yob, zob) and (xu, yu, zu) under different flight parameter combinations. The theoretical required spray angle of the side spray device can be calculated according to Equation (3).
2.3. Spatial Layout Method of Side Spray Device on UAV
- (1)
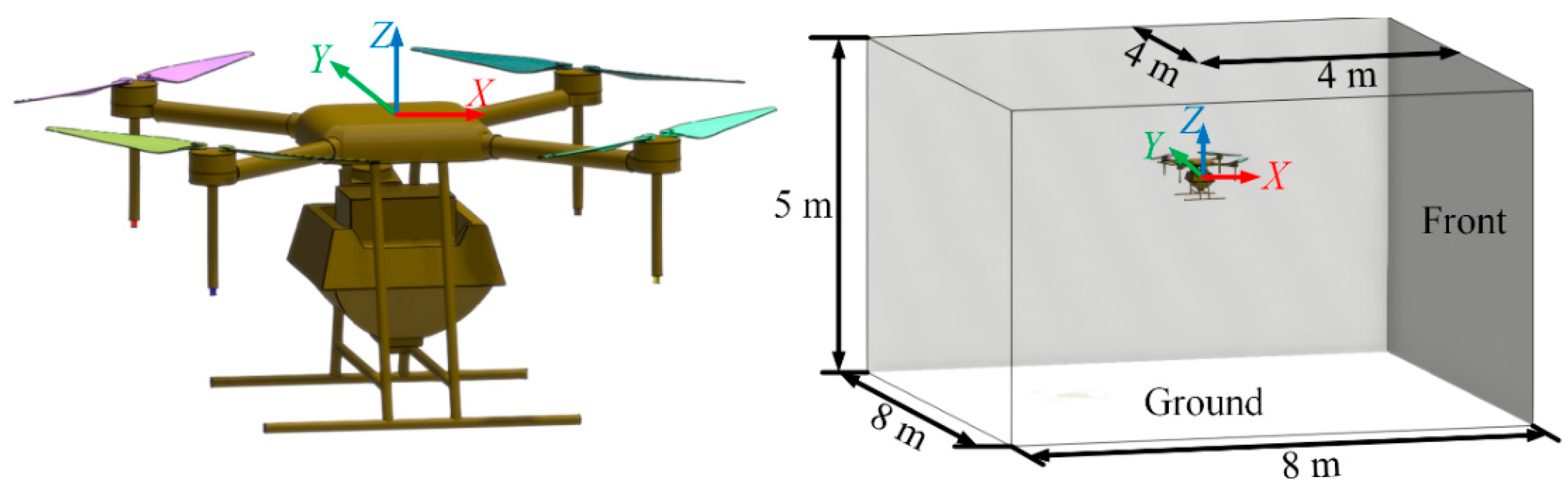
- The rotor wind speed sampling points were arranged as shown in Figure 7a. The sampling points were set up in the form of 5 × 5 × 6 in the X, Y, and Z directions with 150 points. The horizontal distribution surface of the first sampling point was set 0.5 m vertically down from the rotor. Each two adjacent sampling points were spaced by 0.5 m vertically and 0.425 m horizontally.
- (2)
- The Kestrel 4000 anemometer mounts on a retractable tripod bracket, with the impeller of the anemometer placed parallel to the ground to ensure the windward side faces vertically upwards. The UAV was placed on a bracket at 4 m above the ground using fixtures. At this point, the anemometer was 1 m above the ground when measuring the rotor wind speed at the lowermost sampling point. This prevented the anemometer being too close to the ground and affecting the measurement results.
- (3)
- The rotation direction of the rotor was set by the flight control system, as shown in Figure 1b, and the rotor speed was obtained from the flight log of an actual flight according to the flight parameters in Table 3. After the rotor speed had stabilized, the anemometer moved to the sampling point for measurement. Each sampling point was measured continuously for 30 s each time, and the sampling frequency set to 1 s. The average rotor wind speed was calculated after repeating the measurement three times for each sampling point.
- (4)
- The average wind speed of each sampling point was compared with the simulation results to verify the accuracy of the rotor wind field simulation model. The relative error between the simulation and experimental results is defined as Equation (4).
- (5)
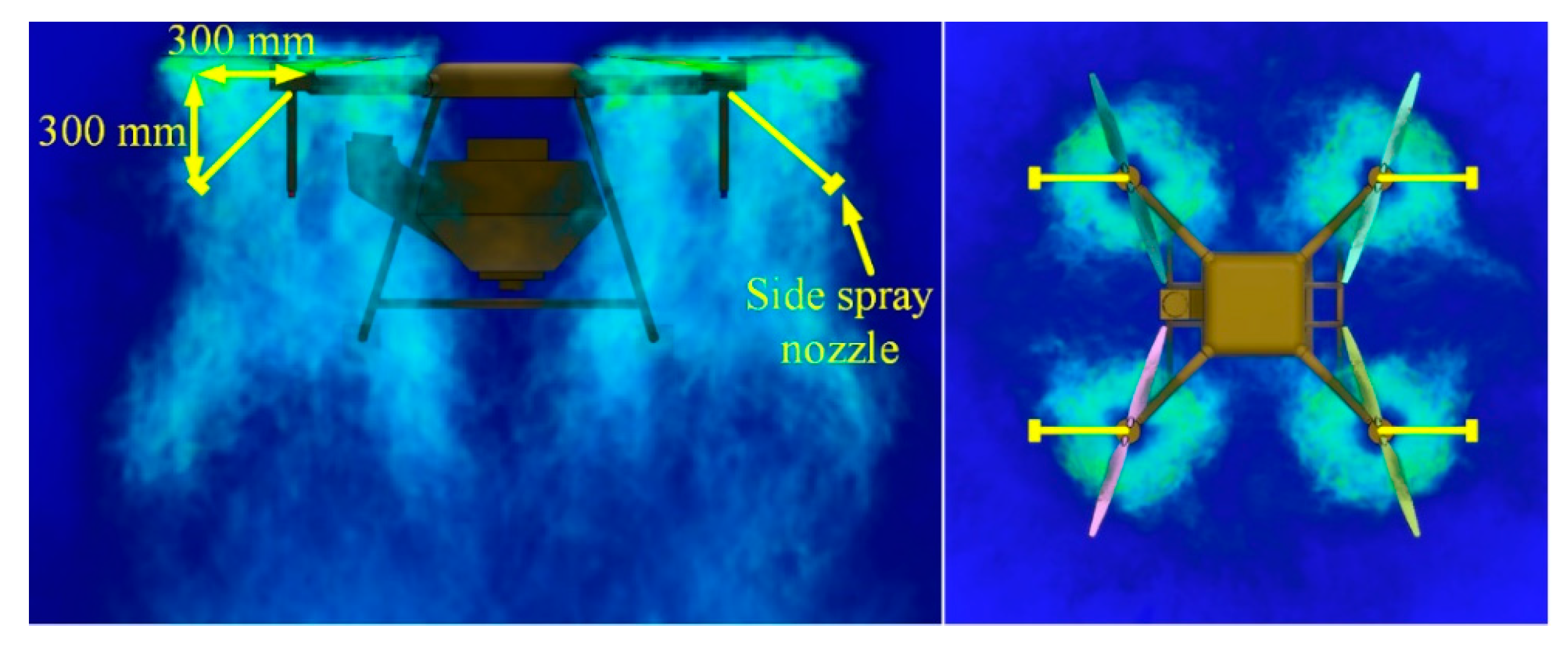
- According to the verified simulation model, the UAV wind field simulation was carried out. The UAV rotor wind field distribution was derived from the simulation results. The spatial layout design of the side spray device on the UAV airframe was guided according to the wind field distribution.
2.4. Spray Performance Experimental Method for Side Spray Device
2.4.1. Spray Pattern Screening Experiment of Side Spray Device
- (1)
- The experimental site was divided into take-off area (length 2.5 m), obstacle avoidance area (length 15 m), and landing area (length 2.5 m). The UAV flew from west to east. A cylindrical obstacle with 5 m height and 0.11 m diameter was placed at the center of the obstacle avoidance area during obstacle avoidance, and the obstacle was removed during non-obstacle avoidance conditions.
- (2)
- Referring to the relevant standards [52,53,54], a total of 25 droplet sampling points were arranged in a 5 × 5 matrix at 1 m intervals. The droplet sampling points parallel to the flight direction served as matrix rows, and the matrix center coincided with the obstacle avoidance area’s center. Water sensitive paper (WSP, Syngenta Group, Basel, Switzerland) was used for coverage assessment. And, to avoid the influence of the ground effect of the rotor wind field on the droplet distribution, the height of the water sensitive paper (WSP) from the ground was set to 0.5 m.
- (3)
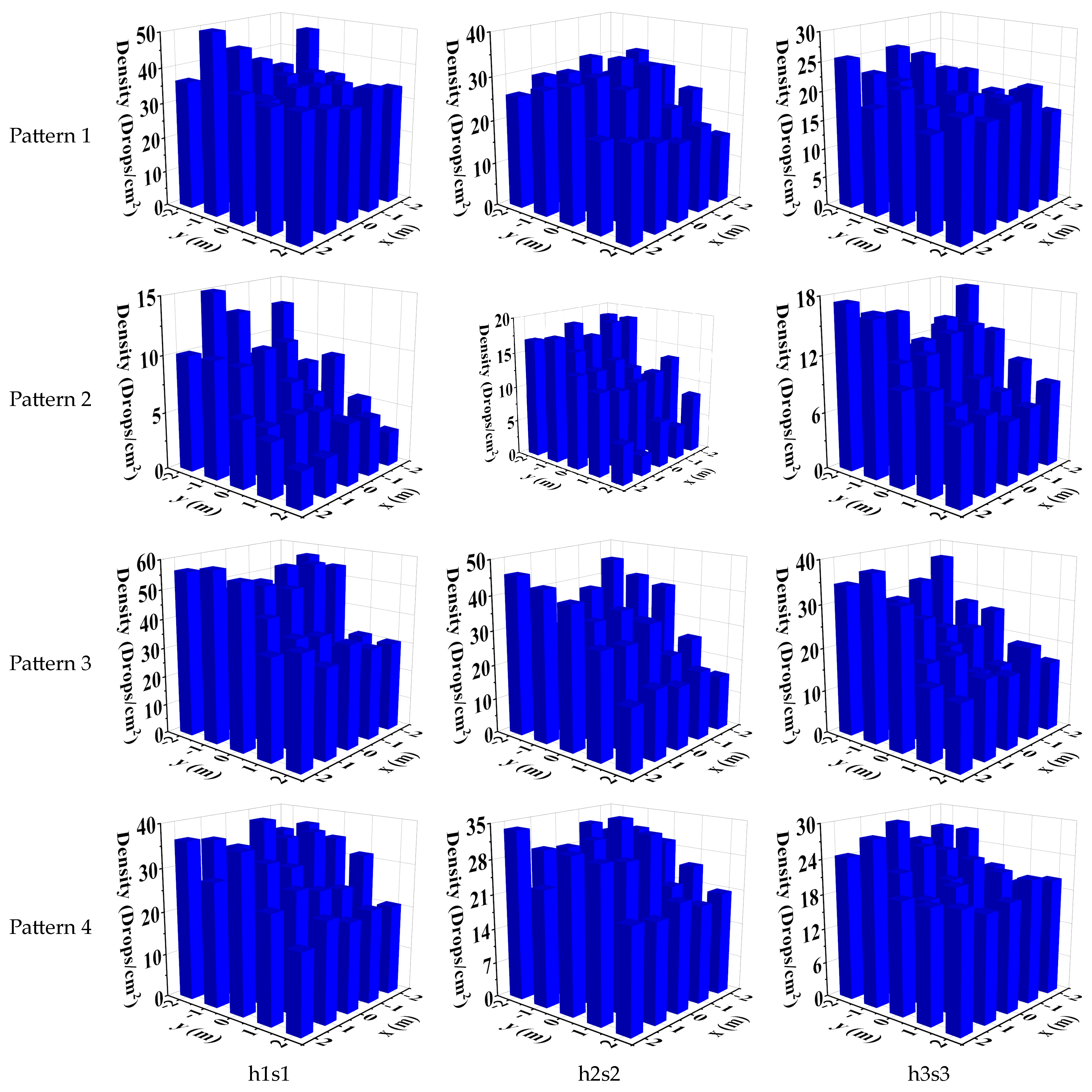
- Once the UAV had taken off and was hovering stably in the take-off area, three sets of flight parameters were selected for obstacle avoidance flights from the flight parameter combinations in Table 3 (h1s1, h2s2, and h3s3). Three replicate experiments were conducted for each spray pattern of the side spray device for each flight parameter combination. For each experiment, the WSP was immediately scanned as a jpg image at 600 dpi by using an HP scanner (Laser NS MFP 1005, HP Inc., Palo Alto, United States) and saved.
- (4)
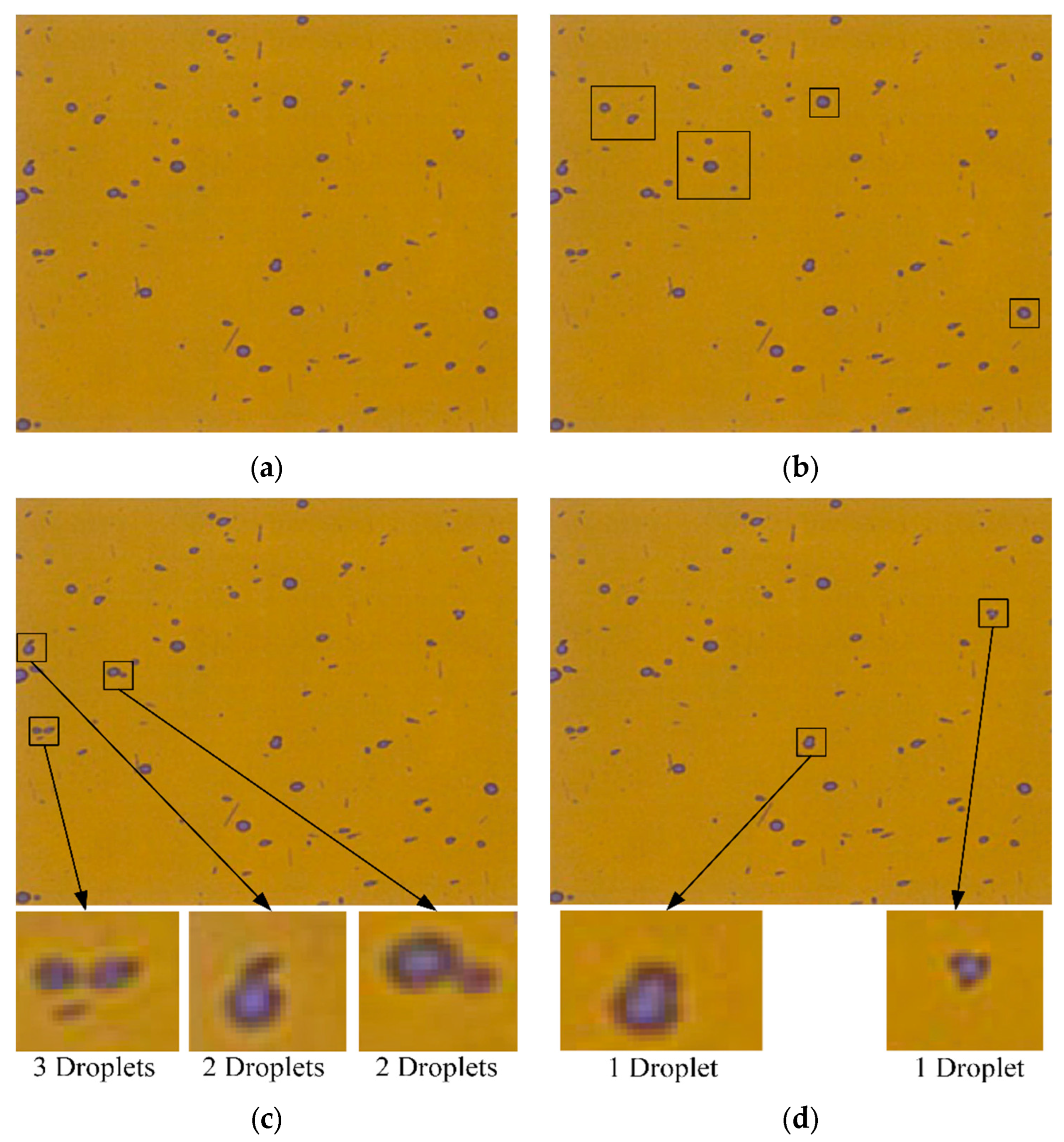
- Referring to the standard [55], the coverage densities of droplets (unit: drops·cm−2) for different spray patterns of the side spray device were obtained from the WSP images observed using a 10× hand-held magnifier. The coverage density of droplets was used to evaluate the spray effect of different spray patterns of the side spray device during obstacle avoidance, so as to obtain the suitable spray pattern for the side spray device.
2.4.2. Spray Experiment of Side Spray Device in a Non-Crop Simulation Environment and Field Environment
- (1)
- The experimental site, site division, circular obstacles, droplet sampling point arrangement, and sampler were the same as in the side spray device spray patterns experiment. Five 6 m long droplet sampling lines were added, which overlapped the columns of the sampling point matrix and were set at 0.5 m height from the ground.
- (2)
- In order to compare the droplet coverage in the obstacle neighborhoods between spraying with and without the side spray device, the spray experiment was divided into groups A and B. In group A, the side spray device sprayed according to pattern 4 during obstacle avoidance. In group B, the side spray device did not spray during obstacle avoidance.
- (3)
- Once the UAV had taken off and was hovering stably in the take-off area, it used the flight parameter combinations shown in Table 3 for obstacle avoidance flight. Three replicate experiments were conducted for each flight parameter combination. And, for each experiment, the WSP was immediately scanned as a jpg image at 600 dpi using an HP scanner (Laser NS MFP 1005, HP Inc., Palo Alto, United States) and saved. Photoshop was used to segment a fixed size of 600 × 500 pixels from the jpg image of each WSP sample, then saved as the raw image and converted to an 8-bit grayscale image.
- (4)
- ImageJ 1.8.0 (https://imagej.net, accessed on 8 June 2024) was used to analyze and evaluate the spray deposition and coverage of the WSP [56,57,58]. The image processing procedure applied in this article was similar to that described by Martin et al. [57]., Zhu et al. [58]., and Cerruto et al. [59]. Based on our group’s previous research [60], the detailed steps are described below. All grayscale images were threshold-processed by Image J 1.8.0 in the MINIMUM auto threshold mode and manually corrected. Then, each binarized image was measured and analyzed by Image J. The droplet deposition information was calculated and saved as an Excel file, including droplet deposition coverage, spray coverage, etc.
- (5)
- The UAV spray performance of the two spraying methods (with side spray device and without side spray device) during obstacle avoidance was evaluated by taking the best droplet deposition for groups A and B. Referring to the standard [61], the effective swath width and distribution uniformity of droplets between sampling points are used as evaluation indexes for the spray performance of the side spray device. The distribution uniformity of droplets can be calculated as Equation (5), and the uniformity is inversely proportional to CV.
3. Results and Discussion
3.1. Relative Position of UAV and Obstacle
3.2. Side Spray Device Spatial Layout on UAV
3.2.1. Model Accuracy Assessment
3.2.2. Nozzle Position Design
3.3. Results of Side Spray Device Experiment
3.3.1. Spray Pattern Screening Results
- (1)
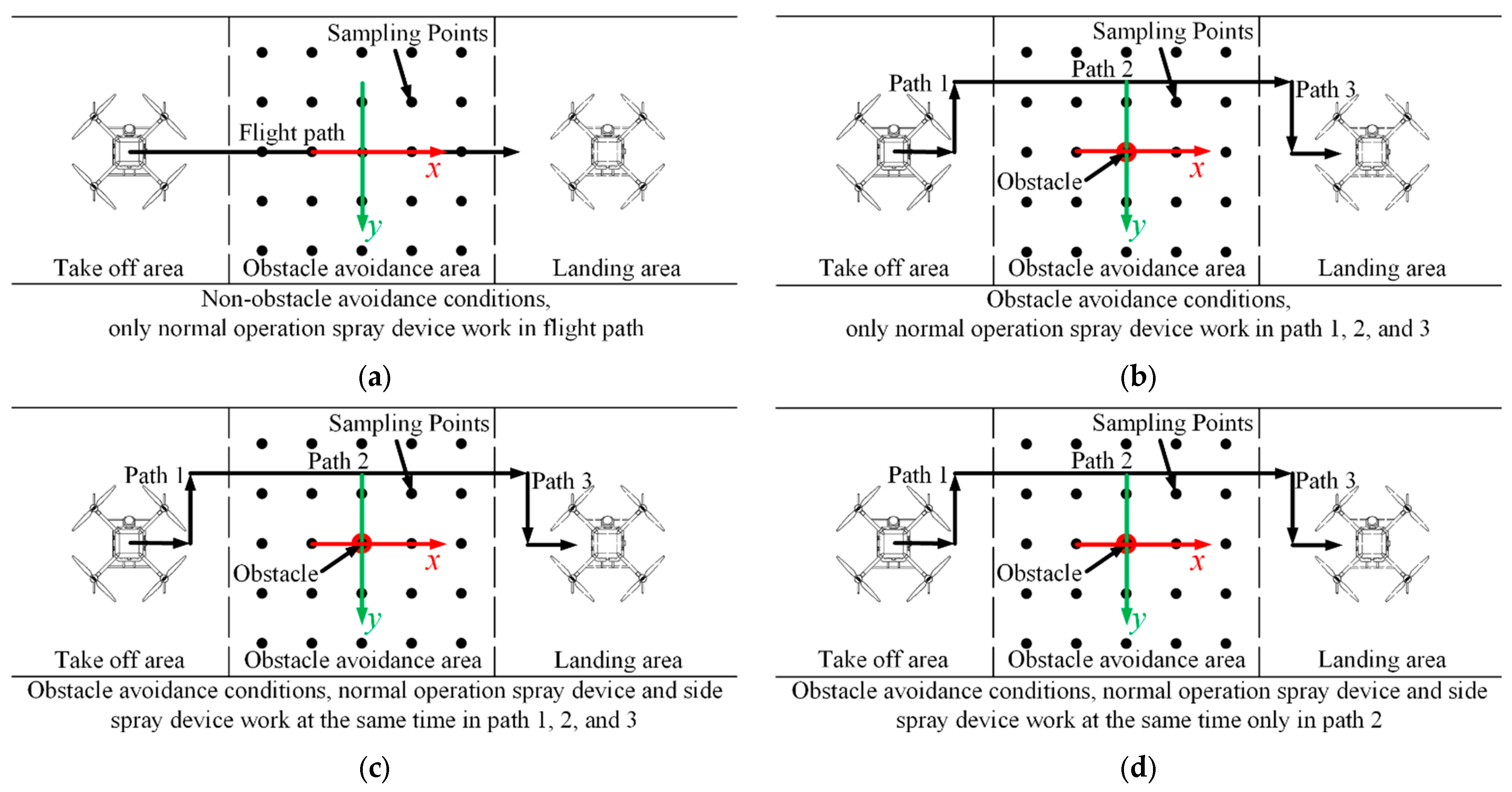
- For spray pattern 2, the normal operation spray device spraying on obstacle avoidance paths 1, 2, and 3, the coverage density of droplets in the obstacle neighborhoods was significantly reduced, and more droplets were deposited near obstacle avoidance path 2. The highest average coverage density of droplets in pattern 2 was only 12.58 drops·cm−2 and the lowest was 7.42 drops·cm−2, making it difficult to meet the plant protection quality requirements in the standard [55].
- (2)
- For spray pattern 3, the side spray device and normal operation spray device spraying simultaneously on obstacle avoidance paths 1, 2, and 3, the coverage density of droplets in the obstacle neighborhoods was significantly higher than for pattern 2. The highest average coverage density of droplets in pattern 3 was 40.10 drops·cm−2 and the lowest was 23.49 drops·cm−2. According to the coverage density of droplets at each sampling point, the droplet deposition near the obstacle avoidance path increased significantly. On obstacle avoidance paths 1 and 3, the UAV was in the lateral movement stage without forward flight speed, leading to a sharp increase in droplet deposition. Compared to the same location in pattern 1, there was a tendency to re-spray.
- (3)
- For spray pattern 4, the side spray device and normal operation spray device spraying simultaneously only on obstacle avoidance path 2, the coverage density of droplets in obstacle neighborhoods was significantly higher than pattern 2, and was similar to the normal spray operation (pattern 1). The highest average coverage density of droplets in pattern 4 was 30.30 drops·cm−2 and the lowest was 22.17 drops·cm−2. Based on the coverage density of droplets at each sampling point, pattern 4 has a more uniform droplet distribution than pattern 3, with non-significant re-spray trends.
3.3.2. Non-Crop Simulation and Field Environment Experiment Results
- (1)
- The side spray device can significantly increase the effective swath width in obstacle neighborhoods during UAV obstacle avoidance. The minimum effective swath width with the side spray device was 1.53 m, the maximum was 4.90 m, and the average was 3.22 m. The minimum effective swath width without the side spray device was 1.30 m, the maximum was 4.51 m, and the average was 2.82 m. For the same flight parameters, using the side spray device can increase the effective swath width by a minimum of 6.35% and a maximum of 35.32%, with an average of 15.25%.
- (2)
- The distribution uniformity of droplets in the obstacle neighborhoods with the side spray device was worse than without the side spray device. But compared to insufficient droplet coverage, this degree of increased uniformity variation is still acceptable. The CV for the distribution uniformity of droplets with the side spray device was the lowest at 32.25% and the highest at 87.15%, with an average of 51.89%. The CV for the distribution uniformity of droplets without the side spray device was the lowest at 21.3% and the highest at 56.96%, with an average of 40.36%.
- (3)
- The distribution uniformity of droplets in the obstacle neighborhoods with the side spray device was worse than without the side spray device, perhaps due to the following reasons. Previous studies have shown that the droplet volume and diameter of the nozzle are not uniformly distributed, but show a normal distribution, which mean the nozzle itself has a nonuniform droplet distribution [67,68,69,70], resulting in a nonuniform droplet distribution of the side spray device in the obstacle neighborhoods. The droplet coverage in the obstacle neighborhoods without the side spray device mainly relies on the droplet drift caused by the rotor wind and environmental wind. And, the nonuniform droplet distribution of the nozzle has little effect on the droplet distribution in the obstacle neighborhoods. As a result, the distribution uniformity of droplets with the side spray device was worse than without the side spray device under different flight parameter combinations. However, this phenomenon also proves that the side spray device can target spraying and improve droplet coverage in obstacle neighborhoods during UAV obstacle avoidance.
4. Conclusions
- (1)
- This study was aimed at the problem of plant protection UAV spray systems not spraying obstacle neighborhoods during obstacle avoidance, resulting in insufficient droplet coverage in the area. To improve the droplet coverage in the obstacle neighborhoods, the design and development of a side spray device for UAVs to improve spray coverage in obstacle neighborhoods was proposed in this article. The main work was as follows. Firstly, a relative position measurement method to measure the distance between the UAV and obstacles during obstacle avoidance under different flight parameter combinations was investigated. Secondly, the nozzle spray angle and nozzle type of the side spray device were determined by combining the relative position. Thirdly, a rotor wind field simulation model of the UAV was proposed based on the LBM. And, the spatial layout design of the side spray device on the UAV airframe was carried out based on the simulation results. Fourthly, a relevant spray experiment was carried out to explore the suitable spray pattern of the side spray device. Finally, the influence relationship between flight speed, altitude, and the interaction of the two on the distribution uniformity of droplets and the effective swath width of the side spray device in obstacle neighborhoods was explored. And, a regression analysis was carried out and an influence relationship model was created.
- (2)
- The side spray device can effectively improve the droplet coverage in obstacle neighborhoods during obstacle avoidance. Compared to without the side spray device, the effective swath width in obstacle neighborhoods with the side spray device can be increased by a minimum of 6.35%, a maximum of 35.32%, and an average of 15.25% under the same flight parameters. The results verify the effectiveness and reasonableness of the design of the side spray device in this article. It can reduce blank dispersal, use fewer droplets, and provide supplementary spray in obstacle neighborhoods when the plant protection UAV operates in an environment with obstacles. It also can improve the spray deposition rate, application rate of pesticide, and operation quality. This article can provide theoretical and technical support to improve the use of plant protection UAVs and research on the same type of device.
- (3)
- The error between the predicted values of the established relational model and the field spray experiment results was less than 15%. This proves the accuracy and credibility of the relational model. And, the relevant rules reflected in the relational model can guide the selection of spray parameters during obstacle avoidance and the optimization of the obstacle avoidance algorithm for the plant protection UAV.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qin, W.C.; Qiu, B.J.; Xue, X.Y.; Chen, C.; Xu, Z.F.; Zhou, Q.Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- He, X.K.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar] [CrossRef]
- Yang, S.L.; Yang, X.B.; Mo, J.Y. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2017, 19, 278–292. [Google Scholar] [CrossRef]
- Lan, Y.B.; Chen, S.D.; Deng, J.Z.; Zhou, Z.Y.; Ouyang, F. Development situation and problem analysis of plant protection unmanned aerial vehicle in China. J. South China Agric. Univ. 2019, 40, 217–225. (In Chinese) [Google Scholar] [CrossRef]
- Wang, L.L.; Lan, Y.B.; Zhang, Y.L.; Zhang, H.H.; Tahir, M.N.; Ou, S.C.; Liu, X.T.; Chen, P.C. Applications and prospects of agricultural unmanned aerial vehicle obstacle avoidance technology in China. Sensors 2019, 19, 642. [Google Scholar] [CrossRef]
- Wang, D.S.; Li, W.; Liu, X.; Li, N.; Zhang, C.L. UAV environmental perception and autonomous obstacle avoidance: A deep learning and depth camera combined solution. Comput. Electron. Agric. 2020, 175, 105523. [Google Scholar] [CrossRef]
- Luo, X.W.; Hu, L.; He, J.; Zhang, Z.G.; Zhou, Z.Y.; Zhang, W.Y.; Liao, J.; Huang, P.K. Key technologies and practice of unmanned farm in China. Trans. Chin. Soc. Agric. Eng. 2024, 40, 1–16. (In Chinese) [Google Scholar] [CrossRef]
- Zhao, C.J.; Fan, B.B.; Li, J.; Feng, Q.C. Agricultural robots: Technology progress, challenges and trends. Smart Agric. 2023, 5, 1–15. (In Chinese) [Google Scholar] [CrossRef]
- Yang, R.; Wang, Y.K.; Wang, B.J. Progress and trend of agricultural robots based on WoS bibliometrics and knowledge graph. Trans. Chin. Soc. Agric. Eng. 2022, 38, 53–62. (In Chinese) [Google Scholar] [CrossRef]
- Park, J.; Cho, N. Collision avoidance of hexacopter UAV based on lidar data in dynamic environment. Remote Sens. 2020, 12, 975. [Google Scholar] [CrossRef]
- Rouveure, R.; Tourrette, T.; Jaud, M.; Faure, P.; Monod, M. Design of lightweight airborne MMW radar for DEM generation. Simulation results. Robot. Auton. Syst. 2017, 96, 26–40. [Google Scholar] [CrossRef]
- Minaeian, S.; Liu, J.; Son, Y.J. Effective and efficient detection of moving targets from a UAV’s camera. IEEE Trans. Intell. Transp. Syst. 2018, 19, 497–506. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Singla, A.; Padakandla, S.; Bhatnagar, S. Memory-based deep reinforcement learning for obstacle avoidance in UAV with limited environment knowledge. IEEE Trans. Intell. Transp. Syst. 2019, 22, 107–118. [Google Scholar] [CrossRef]
- Yang, X.; Luo, H.C.; Wu, Y.H.; Gao, Y.; Liao, C.Y.; Cheng, K.T. Reactive obstacle avoidance of monocular quadrotors with online adapted depth prediction network. Neurocomputing 2019, 325, 142–158. [Google Scholar] [CrossRef]
- Zhang, S.; Cai, C.; Li, J.; Sun, T.; Liu, X.; Tian, Y.; Xue, X. The airflow field characteristics of the unmanned agricultural aerial system on oilseed rape (Brassica napus) canopy for supplementary pollination. Agronomy 2021, 11, 2035. [Google Scholar] [CrossRef]
- Tang, Q.; Zhang, R.; Chen, L.; Xu, G.; Deng, W.; Ding, C.; Xu, M.; Yi, T.; Wen, Y.; Li, L. High-accuracy, high-resolution downwash flow field measurements of an unmanned helicopter for precision agriculture. Comput. Electron. Agric. 2020, 173, 105390. [Google Scholar] [CrossRef]
- Tang, Q.; Zhang, R.; Chen, L.; Deng, W.; Xu, M.; Xu, G.; Li, L.; Hewitt, A. Numerical simulation of the downwash flow field and droplet movement from an unmanned helicopter for crop spraying. Comput. Electron. Agric. 2020, 174, 105468. [Google Scholar] [CrossRef]
- Xue, X.; Tu, K.; Qin, W.; Lan, Y.; Zhang, H. Drift and deposition of ultra-low altitude and low volume application in paddy field. Int. J. Agric. Biol. Eng. 2014, 7, 23. [Google Scholar] [CrossRef]
- Wang, C.; Zeng, A.; He, X.; Song, J.; Herbst, A.; Gao, W. Spray drift characteristics test of unmanned aerial vehicle spray unit under wind tunnel conditions. Int. J. Agric. Biol. Eng. 2020, 13, 13–21. [Google Scholar] [CrossRef]
- Liang, Z.; Fan, G.Q.; Wang, G.M.; Ding, H.; Zhang, X.H. Distribution model of wind-stressed droplet deposition based on bimodal distribution. Trans. Chin. Soc. Agric. Mach. 2020, 51, 28–37. (In Chinese) [Google Scholar] [CrossRef]
- Kharim, M.N.A.; Wayayok, A.; Mohamed Shariff, A.R.; Abdullah, A.F.; Husin, E.M. Droplet deposition density of organic liquid fertilizer at low altitude UAV aerial spraying in rice cultivation. Comput. Electron. Agric. 2019, 167, 105045. [Google Scholar] [CrossRef]
- Chen, S.D.; Lan, Y.B.; Li, J.Y.; Zhou, Z.Y.; Jin, J.; Liu, A.M. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy. Trans. Chin. Soc. Agric. Eng. 2016, 32, 40–46. (In Chinese) [Google Scholar] [CrossRef]
- Pan, Z.; Lie, D.; Qiang, L.; Shaolan, H.; Shilai, Y.; Yande, L.; Yongxu, Y.; Haiyang, P. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution. Int. J. Agric. Biol. Eng. 2016, 9, 45. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Cao, Y.F.; Ding, M.; Zhuang, L.K.; Tao, J. Monocular vision based obstacle avoidance trajectory planning for Unmanned Aerial Vehicle. Aerosp. Sci. Technol. 2020, 106, 106199. [Google Scholar] [CrossRef]
- Lan, Y.B.; Wang, L.L.; Zhang, Y.L. Application and prospect on obstacle avoidance technology for agricultural UAV. Trans. Chin. Soc. Agric. Eng. 2018, 34, 104–113. (In Chinese) [Google Scholar] [CrossRef]
- Shibbir, A.; Huang, X.; Faheem, M.; Qiu, B.J. Stability analysis of a sprayer UAV with a liquid tank with different outer shapes and inner structures. Agriculture 2022, 12, 379. [Google Scholar] [CrossRef]
- Shibbir, A.; Qiu, B.J.; Fiaz, A.; Kong, C.W.; Huang, X. A state-of-the-art analysis of obstacle avoidance methods from the perspective of an agricultural sprayer UAV’s operation scenario. Agronomy 2021, 11, 1069. [Google Scholar] [CrossRef]
- Yuan, J.; Zhao, X.X.; Li, M.; Yan, X.H.; Liu, X.M. Design and test of high clearance boom-tunnel type sprayer. Trans. Chin. Soc. Agric. Eng. 2015, 31, 60–68. (In Chinese) [Google Scholar] [CrossRef]
- Wang, B.; Zhang, D.X.; Yang, L.; Wang, L.J. Gate-type spray system of high-frame corn spayer. Trans. Chin. Soc. Agric. Mach. 2014, 45, 104–111. (In Chinese) [Google Scholar] [CrossRef]
- Huang, X.; Dong, X.Y.; Ma, J.; Liu, K.; Ahmed, S.; Lin, J.L.; Ahmad, F.; Qiu, B.J. Evaluation and experiment of flight parameter quality of the plant protection uav based on laser tracker. Agriculture 2021, 11, 628. [Google Scholar] [CrossRef]
- Jin, Y.K.; Xue, X.Y.; Qin, W.C.; Sun, Z. Performance test of electric powered single-rotor UAV for plant protection. J. Chin. Agric. Mech. 2019, 40, 56–61. (In Chinese) [Google Scholar] [CrossRef]
- NY/T 3213-2023; Technical Specification of Quality Evaluation for Crop Protection UAS. Ministry of Agriculture of the People’s Republic of China: Beijing, China, 2023.
- Wen, S.; Han, J.; Ning, Z.H.; Lan, Y.B.; Yin, X.C.; Zhang, J.T.; Ge, Y.F. Numerical analysis and validation of spray distributions disturbed by quad-rotor drone wake at different flight speeds. Comput. Electron. Agric. 2019, 166, 105036. [Google Scholar] [CrossRef]
- Zheng, Y.; Yang, S.; Liu, X.; Wang, J.; Norton, T.; Chen, J.; Tan, Y. The computational fluid dynamic modeling of downwash flow field for a six-rotor UAV. Front. Agric. Sci. Eng. 2018, 5, 159–167. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.P.L.; Krishnamachari, B.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Zeng, R.H.; Lai, Q.H.; Yuan, S.; Shen, S.Y.; Yang, L. Investigation of effects of downwash airflow field on droplet motion characteristics of small plant protection unmanned aerial vehicles. Trans. Chin. Soc. Agric. Mach. 2023, 54, 208–216. (In Chinese) [Google Scholar] [CrossRef]
- Huang, X.; Dong, X.; Ma, J.; Liu, K.; Ahmed, S.; Lin, J.; Qiu, B. The Improved A* obstacle avoidance algorithm for the plant protection UAV with millimeter wave radar and monocular camera data fusion. Remote Sens. 2021, 13, 3364. [Google Scholar] [CrossRef]
- Yang, F.B.; Xue, X.Y.; Zhang, L.; Sun, Z. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover. Int. J. Agric. Biol. Eng. 2017, 10, 41–53. [Google Scholar] [CrossRef]
- Tang, Y.; Hou, C.J.; Luo, S.M.; Lin, J.T.; Yang, Z.; Huang, W.F. Effects of operation height and tree shape on droplet deposition in citrus trees using an unmanned aerial vehicle. Comput. Electron. Agric. 2018, 148, 1–7. [Google Scholar] [CrossRef]
- Hou, C.J.; Tang, Y.; Luo, S.M.; Lin, J.T.; He, Y.; Zhuang, J.J.; Huang, W.F. Optimization of control parameters of droplet density in citrus trees using UAVs and the Taguchi method. Int. J. Agric. Biol. Eng. 2019, 12, 1–9. [Google Scholar] [CrossRef]
- Wang, C.L.; He, X.K.; Bonds, J.; Qi, P.; Yang, Y.; Gao, W.L. Effect of downwash airflow field of 8-rotor unmanned aerial vehicle on spray deposition distribution characteristics under different flight parameters. Smart Agric. 2020, 2, 124–136. (In Chinese) [Google Scholar] [CrossRef]
- Yang, Z.L.; Ge, L.Z.; Qi, L.J.; Cheng, Y.F.; Wu, Y.L. Influence of UAV rotor down-wash airflow on spray width. Trans. Chin. Soc. Agric. Mach. 2018, 49, 116–122. (In Chinese) [Google Scholar] [CrossRef]
- Chen, S.Y.; Gary, D.D. Lattice boltzmann method for fluid flows. Annu. Rev. Fluid. Mech. 1998, 30, 329–364. [Google Scholar] [CrossRef]
- Yu, D.Z.; Mei, R.W.; Luo, L.S.; Shyy, W. Viscous flow computations with the method of lattice Boltzmann equation. Prog. Aerosp. Sci. 2003, 39, 329–367. [Google Scholar] [CrossRef]
- Wen, S.; Han, J.; Lan, Y.B.; Yin, X.C.; Lu, Y.H. Influence of wing tip vortex on drift of single rotor plant protection unmanned aerial vehicle. Trans. Chin. Soc. Agric. Mach. 2018, 49, 127–137. (In Chinese) [Google Scholar] [CrossRef]
- Huang, X.; Wang, W.; Li, Z.; Wang, Q.; Zhu, C.; Chen, L. Design method and experiment of machinery for combined application of seed, fertilizer and herbicide. Int. J. Agric. Biol. Eng. 2019, 12, 63–71. [Google Scholar] [CrossRef]
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2020, 21, 226–243. [Google Scholar] [CrossRef]
- Appah, S.; Jia, W.; Ou, M.; Wang, P.; Asante, E.A. Analysis of potential impaction and phytotoxicity of surfactant-plant surface interaction in pesticide application. Crop Prot. 2020, 127, 104961. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Pessin, G.; Filho, G.P.R.; Furquim, G.; de Carvalho, A.C.P.L.; Ueyama, J. Exploiting evolution on UAV control rules for spraying pesticides on crop fields. In International Conference on Engineering Applications of Neural Networks; Springer International Publishing: Cham, Switzerland, 2014; pp. 49–58. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Lan, Y.B.; Wen, S.; Xu, T.Y.; Yu, F.H. Research progress in rotor airflow model of plant protection UAV and droplet motion mechanism. Trans. Chin. Soc. Agric. Eng. 2020, 36, 1–12. (In Chinese) [Google Scholar] [CrossRef]
- GB/T 20183.1-2024; Equipment for Crop Protection—Spraying Equipment—Part 1: Test Methods for Sprayer Nozzles. National Standards of People’s Republic of China: Beijing, China, 2024.
- GB/T 40331.1-2021; Crop Protection Equipment—Spray Deposition Test for Field Crop—Part 1: Measurement in a Horizontal Plane. Standards of People’s Republic of China: Beijing, China, 2021.
- GB/T 40331.2-2021; Crop Protection Equipment—Spray Deposition Test for Field Crop—Part 2: Measurement in a Crop. Standards of People’s Republic of China: Beijing, China, 2021.
- NY/T 4258-2022; Crop Protection UAS—Spraying Quality. Ministry of Agriculture and Rural Affairs: Beijing, China, 2022.
- Daniel, E.M. A fluorescent imaging technique for quantifying spray deposits on plant leaves. At. Spray. 2014, 24, 367–373. [Google Scholar] [CrossRef]
- Martin, D.E.; Latheef, M.A. Aerial electrostatic spray deposition and canopy penetration in cotton. J. Electrost. 2017, 90, 38–44. [Google Scholar] [CrossRef]
- Zhu, H.; Salyani, M.; Fox, R.D. A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 2011, 76, 38–43. [Google Scholar] [CrossRef]
- Cerruto, E.; Manetto, G.; Longo, D.; Failla, S.; Papa, R. A model to estimate the spray deposit by simulated water sensitive papers. Crop Prot. 2019, 124, 104861. [Google Scholar] [CrossRef]
- Lin, J.L.; Ma, J.; Liu, K.; Huang, X.; Xiao, L.P.; Ahmed, S.; Dong, X.Y.; Qiu, B.J. Development and test of an autonomous air-assisted sprayer based on single hanging track for solar greenhouse. Crop Prot. 2021, 142, 105502. [Google Scholar] [CrossRef]
- MH/T 1040-2011; Determining Application Rates and Distribution Patterns from Aerial Application Equipment. China Civil Aviation Science and Technology Research Institute: China, 2011.
- Zhang, S.; Xue, X.; Sun, Z.; Zhou, L.; Jin, Y. Downwash distribution of single-rotor unmanned agricultural helicopter on hovering state. Int. J. Agric. Biol. Eng. 2017, 10, 14–24. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Q.; Hou, Q.H.; Chen, D.; Wang, S.M. Vertical distribution law of six-rotor plant protection UAV based on multi-feature parameters. Trans. Chin. Soc. Agric. Eng. 2022, 53, 75–83. (In Chinese) [Google Scholar] [CrossRef]
- Kutz, B.M.; Keßler, M.; Krämer, E. Experimental and numerical examination of a helicopter hovering in ground effect. CEAS Aeronaut. J. 2013, 4, 397–408. [Google Scholar] [CrossRef]
- Mylapore, A.R.; Schmitz, F.H. An Experimental Investigation of Ground Effect on a Quad Tilt Rotor in Hover. J. Am. Helicopter Soc. 2015, 60, 1–14. [Google Scholar] [CrossRef]
- Li, M.Z.; Li, X.Z.; Yang, W.; Hao, Z.Y. Design and experiment of UAV spray quality detection system. Trans. Chin. Soc. Agric. Mach. 2021, 52, 36–42. (In Chinese) [Google Scholar] [CrossRef]
- Jensen, P.K.; Lund, I. Static and dynamic distribution of spray from single nozzles and the influence on biological efficacy of band applications of herbicides. Crop Prot. 2006, 25, 1201–1209. [Google Scholar] [CrossRef]
- Altieri, A.L.; Cryer, S.A. Break-up of sprayed emulsions from flat-fan nozzles using a hole kinematics model. Biosyst. Eng. 2018, 169, 104–114. [Google Scholar] [CrossRef]
- Musiu, E.M.; Qi, L.; Wu, Y. Evaluation of droplets size distribution and velocity pattern using Computational Fluid Dynamics modelling. Comput. Electron. Agric. 2019, 164, 104886. [Google Scholar] [CrossRef]
- Wu, C.D.; Du, Y.S.; Zhang, W.; Zhang, B.; Chen, Z.G. Study on the deposit distribution of the modulated variable rate spray system. Trans. Chin. Soc. Agric. Mach. 2007, 38, 70–73. (In Chinese) [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Physical | Self-weight (kg) | 8 |
| Diagonal wheelbase (mm) | 1200 | |
| Propeller (mm) | 736.6 | |
| Flight | Maximum takeoff weight (kg) | 21.5 |
| Flight altitude (m) | 0 to 20 | |
| Flight speed (m·s−1) | 1.0 to 8.0 | |
| Obstacle avoidance | Obstacle avoidance mode | Hover; detour |
| Minimum obstacle diameter (mm) | 30 | |
| Maximum obstacle avoidance flight speed (m·s−1) | 3 | |
| Spray | Tank volume (L) | 10 |
| Spraying volume (L·ha−1) | 12 to 18 | |
| Nozzle type | Hollow-cone nozzle | |
| Nozzle | Nozzle model | Lechler-TR60 |
| Tip | 005–05 | |
| Spray angle (°) | 60 | |
| Material | Ceramic | |
| Spraying pressure (MPa) | 0.2–2 | |
| Filter (mesh) | 60 | |
| Parameter | Value (Work with Leica 38.1 mm Target Ball) |
|---|---|
| Maximum measuring distance (m) | 160 |
| Distance accuracy (µm·m−1) | 0.5 |
| Horizontal rotation angle (°) | 0 to 360 |
| Vertical rotation angle (°) | −145 to +145 |
| Angle accuracy (µm·m−1) | ±15 + 6 |
| Maximum sampling frequency (Hz) | 1000 |
| Operating temperature (°C) | 0 to 40 |
| Combination | Altitude (m) | Speed (m·s−1) |
|---|---|---|
| h1s1 | 1.0 | 1.0 |
| h1s2 | 1.0 | 2.0 |
| h1s3 | 1.0 | 3.0 |
| h2s1 | 2.0 | 1.0 |
| h2s2 | 2.0 | 2.0 |
| h2s3 | 2.0 | 3.0 |
| h3s1 | 3.0 | 1.0 |
| h3s2 | 3.0 | 2.0 |
| h3s3 | 3.0 | 3.0 |
| Parameter | Value |
|---|---|
| Pressure outlet of calculation domain (MPa) | 0 |
| Turbulence model | LES+ wall function |
| Gravitational acceleration (m·s−2) | 9.81 |
| Air density (kg·m−3) | 1.225 |
| Air dynamic viscosity (Pa·s) | 1.7894 × 10−5 |
| Air specific heat capacity (J·(kg·K)−1) | 1006.43 |
| Air thermal conductivity (W·(m·K)−1) | 0.0243 |
| Reference temperature (K) | 288.15 |
| Parameters | Value |
|---|---|
| Nozzle tip | 005–05 |
| Spray angle (°) | 80 |
| Material | Ceramic |
| Pressure (MPa) | 0.3–2 |
| Filter (mesh) | 60 |
| Distance from Rotor (m) | Sampling Line A | Sampling Line B | Sampling Line C | Sampling Line D | Sampling Line E | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Simulation (m·s−1) | Test (m·s−1) | Error (%) | Simulation (m·s−1) | Test (m·s−1) | Error (%) | Simulation (m·s−1) | Test (m·s−1) | Error (%) | Simulation (m·s−1) | Test (m·s−1) | Error (%) | Simulation (m·s−1) | Test (m·s−1) | Error (%) | |
| 0.5 | 3 | 2.8 | 7.1 | 6.5 | 6 | 8.3 | 2.4 | 2.2 | 9.1 | 7.7 | 7.2 | 6.9 | 1.2 | 1.1 | 9.1 |
| 1.0 | 2.2 | 2.1 | 4.8 | 5.6 | 5.1 | 9.8 | 6.9 | 6.6 | 4.5 | 4.9 | 4.5 | 8.9 | 1.3 | 1.2 | 6.8 |
| 1.5 | 1.4 | 1.3 | 7.7 | 5.2 | 5 | 4 | 3.5 | 3.2 | 9.4 | 7.3 | 6.9 | 5.8 | 4.7 | 4.3 | 9.3 |
| 2.0 | 1.2 | 1.1 | 9.1 | 4.1 | 3.8 | 7.9 | 4.6 | 4.3 | 7 | 4.8 | 4.4 | 8.7 | 1.9 | 1.8 | 5.6 |
| 2.5 | 0.9 | 0.8 | 12.5 | 4.6 | 3.9 | 17.9 | 2.6 | 2.2 | 18.2 | 2.7 | 2.4 | 12.5 | 1 | 0.9 | 12.5 |
| 3.0 | 1.1 | 0.9 | 22.2 | 2.6 | 2.1 | 23.8 | 3.3 | 2.8 | 17.9 | 1.3 | 1.1 | 18.2 | 0.9 | 0.7 | 28.6 |
| Flight Parameter Combinations | Average Coverage Density of Droplets (Drops·cm−2) | |||
|---|---|---|---|---|
| Pattern 1 | Pattern 2 | Pattern 3 | Pattern 4 | |
| h1s1 | 36.03 | 7.42 | 40.10 | 30.30 |
| h2s2 | 26.35 | 12.58 | 30.47 | 27.67 |
| h3s3 | 20.05 | 11.84 | 23.49 | 22.17 |
| Flight Parameter Combination | Distribution Uniformity of Droplets (%) | Effective Swath Width (m) | ||
|---|---|---|---|---|
| Group A | Group B | Group A | Group B | |
| h1s1 | 87.15 | 43.99 | 1.53 | 1.30 |
| h1s2 | 60.91 | 47.48 | 1.70 | 1.55 |
| h1s3 | 50.43 | 21.30 | 1.82 | 1.58 |
| h2s1 | 51.72 | 28.19 | 2.95 | 2.18 |
| h2s2 | 32.25 | 45.90 | 3.35 | 3.15 |
| h2s3 | 37.82 | 30.79 | 3.65 | 3.05 |
| h3s1 | 35.21 | 52.27 | 4.30 | 3.90 |
| h3s2 | 59.50 | 56.96 | 4.75 | 4.15 |
| h3s3 | 52.00 | 36.36 | 4.90 | 4.51 |
| Flight Parameter Combination | Repeat | Flight Altitude (m) | Flight Speed (m·s−1) | Distribution Uniformity of Droplets (%) | Average Distribution Uniformity (%) | Effective Swath Width (m) | Average Effective Swath Width (m) |
|---|---|---|---|---|---|---|---|
| h1s1 | 1 | 0.98 | 1.12 | 89.05 | 90.25 | 1.21 | 1.31 |
| 2 | 1.05 | 0.95 | 90.51 | 1.36 | |||
| 3 | 1.02 | 1.03 | 91.20 | 1.35 | |||
| h1s2 | 1 | 1.15 | 1.98 | 80.13 | 80.70 | 1.72 | 1.73 |
| 2 | 1.12 | 2.16 | 83.35 | 1.66 | |||
| 3 | 0.89 | 2.05 | 78.62 | 1.81 | |||
| h1s3 | 1 | 1.08 | 2.95 | 63.09 | 60.85 | 2.01 | 1.86 |
| 2 | 1.14 | 3.12 | 60.91 | 1.86 | |||
| 3 | 1.22 | 3.08 | 58.56 | 1.71 | |||
| h2s1 | 1 | 2.15 | 1.22 | 58.65 | 63.08 | 2.53 | 2.55 |
| 2 | 2.23 | 1.08 | 70.77 | 2.72 | |||
| 3 | 1.98 | 1.15 | 59.81 | 2.39 | |||
| h2s2 | 1 | 2.10 | 1.89 | 35.75 | 37.94 | 4.11 | 3.72 |
| 2 | 2.21 | 1.96 | 39.01 | 3.79 | |||
| 3 | 2.08 | 2.21 | 39.15 | 3.26 | |||
| h2s3 | 1 | 2.23 | 3.33 | 34.73 | 39.43 | 3.92 | 3.48 |
| 2 | 2.17 | 3.08 | 40.11 | 3.20 | |||
| 3 | 2.09 | 2.95 | 43.44 | 3.31 | |||
| h3s1 | 1 | 3.22 | 0.89 | 58.69 | 55.92 | 3.99 | 3.97 |
| 2 | 3.16 | 0.96 | 52.13 | 4.15 | |||
| 3 | 2.81 | 1.02 | 56.95 | 3.76 | |||
| h3s2 | 1 | 3.26 | 2.51 | 30.29 | 30.37 | 5.15 | 4.75 |
| 2 | 2.96 | 2.11 | 38.15 | 4.78 | |||
| 3 | 2.88 | 1.86 | 22.66 | 4.31 | |||
| h3s3 | 1 | 3.41 | 2.79 | 32.51 | 35.61 | 5.25 | 5.08 |
| 2 | 3.19 | 3.22 | 39.30 | 4.86 | |||
| 3 | 3.29 | 3.18 | 35.02 | 5.12 |
| Variance Source | Distribution Uniformity of Droplets (%) | Effective Swath Width (m) | ||
|---|---|---|---|---|
| Regression Coefficient | Standard Error | Regression Coefficient | Standard Error | |
| Intercept | 183.315 | 14.736 | −1.503 | 0.621 |
| Altitude a | −61.770 | 10.177 | 1.393 | 0.429 |
| Speed s | −44.015 | 11.516 | 1.549 | 0.485 |
| Altitude·Speed a·s | 1.178 | 1.859 | 0.096 | 0.078 |
| Altitude2 a2 | 9.840 | 2.425 | −0.034 | 0.102 |
| Speed2 s2 | 7.396 | 2.553 | −0.347 | 0.108 |
| Variance Source | Distribution Uniformity of Droplets (%) | Effective Swath Width (m) | ||||
|---|---|---|---|---|---|---|
| Sum of Squares | Degrees of Freedom | Mean Square | Sum of Squares | Degrees of Freedom | Mean Square | |
| Regression | 313.372 | 6 | 52.229 | 91,297.489 | 6 | 15,216.248 |
| Residual | 1.760 | 21 | 0.084 | 990.271 | 21 | 47.156 |
| Pre-correction | 315.132 | 27 | - | 92,287.760 | 27 | - |
| Post-correction | 45.710 | 26 | - | 10,883.135 | 26 | - |
| Group | Flight Altitude (m) | Flight Speed (m·s−1) | Distribution Uniformity of Droplets (%) | Effective Swath Width (m) | ||||
|---|---|---|---|---|---|---|---|---|
| Experiment | Predicted | Error (%) | Experiment | Predicted | Error (%) | |||
| 1 | 1.5 | 1.5 | 57.57 | 66.07 | 14.76 | 2.51 | 2.27 | 9.56 |
| 2 | 2.5 | 1.5 | 49.04 | 45.43 | 7.36 | 4.17 | 3.67 | 11.99 |
| 3 | 1.5 | 2.5 | 47.27 | 53.41 | 12.99 | 2.41 | 2.57 | 6.64 |
| 4 | 2.5 | 2.5 | 36.18 | 33.94 | 6.19 | 4.48 | 4.07 | 9.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, F.; Qiu, B.; Dong, X.; Yi, K.; Wang, Q.; Jiang, C.; Zhang, X.; Huang, X. Design and Development of a Side Spray Device for UAVs to Improve Spray Coverage in Obstacle Neighborhoods. Agronomy 2024, 14, 2002. https://doi.org/10.3390/agronomy14092002
Kong F, Qiu B, Dong X, Yi K, Wang Q, Jiang C, Zhang X, Huang X. Design and Development of a Side Spray Device for UAVs to Improve Spray Coverage in Obstacle Neighborhoods. Agronomy. 2024; 14(9):2002. https://doi.org/10.3390/agronomy14092002
Chicago/Turabian StyleKong, Fanrui, Baijing Qiu, Xiaoya Dong, Kechuan Yi, Qingqing Wang, Chunxia Jiang, Xinwei Zhang, and Xin Huang. 2024. "Design and Development of a Side Spray Device for UAVs to Improve Spray Coverage in Obstacle Neighborhoods" Agronomy 14, no. 9: 2002. https://doi.org/10.3390/agronomy14092002