Polarimetric Backscatter Sonde Observations of Southern Ocean Clouds and Aerosols


Abstract
1. Introduction
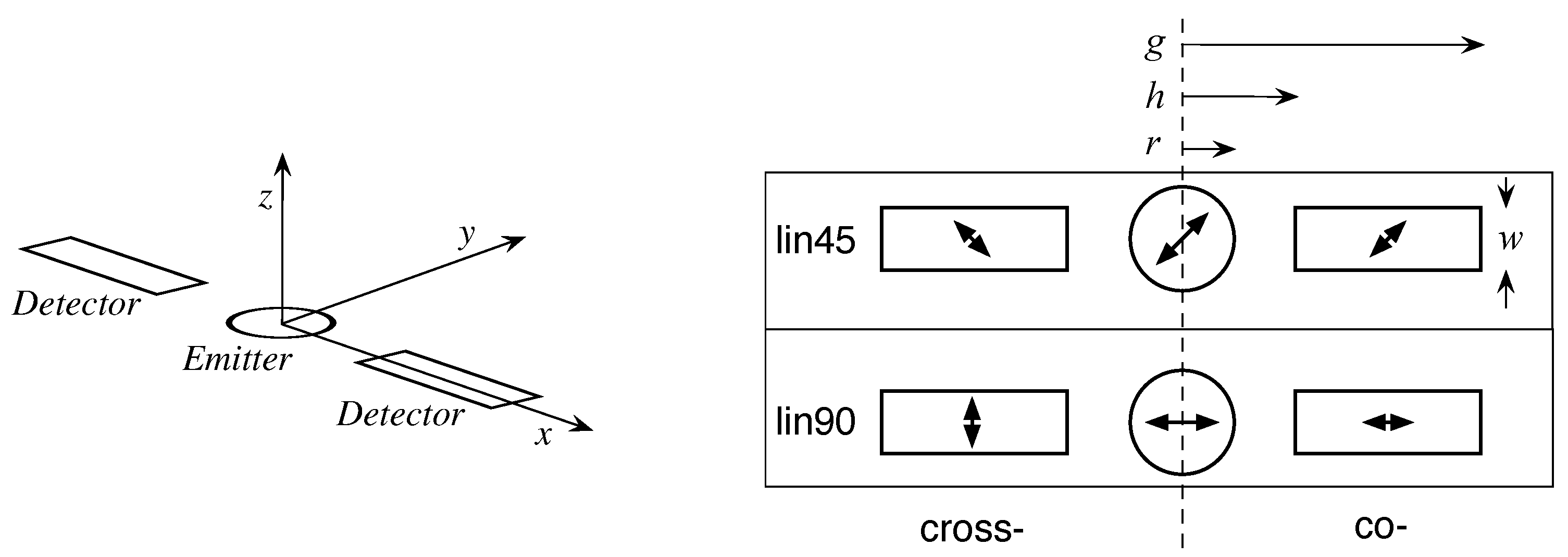
2. Polarsonde
3. Description of Polarsonde Profiles
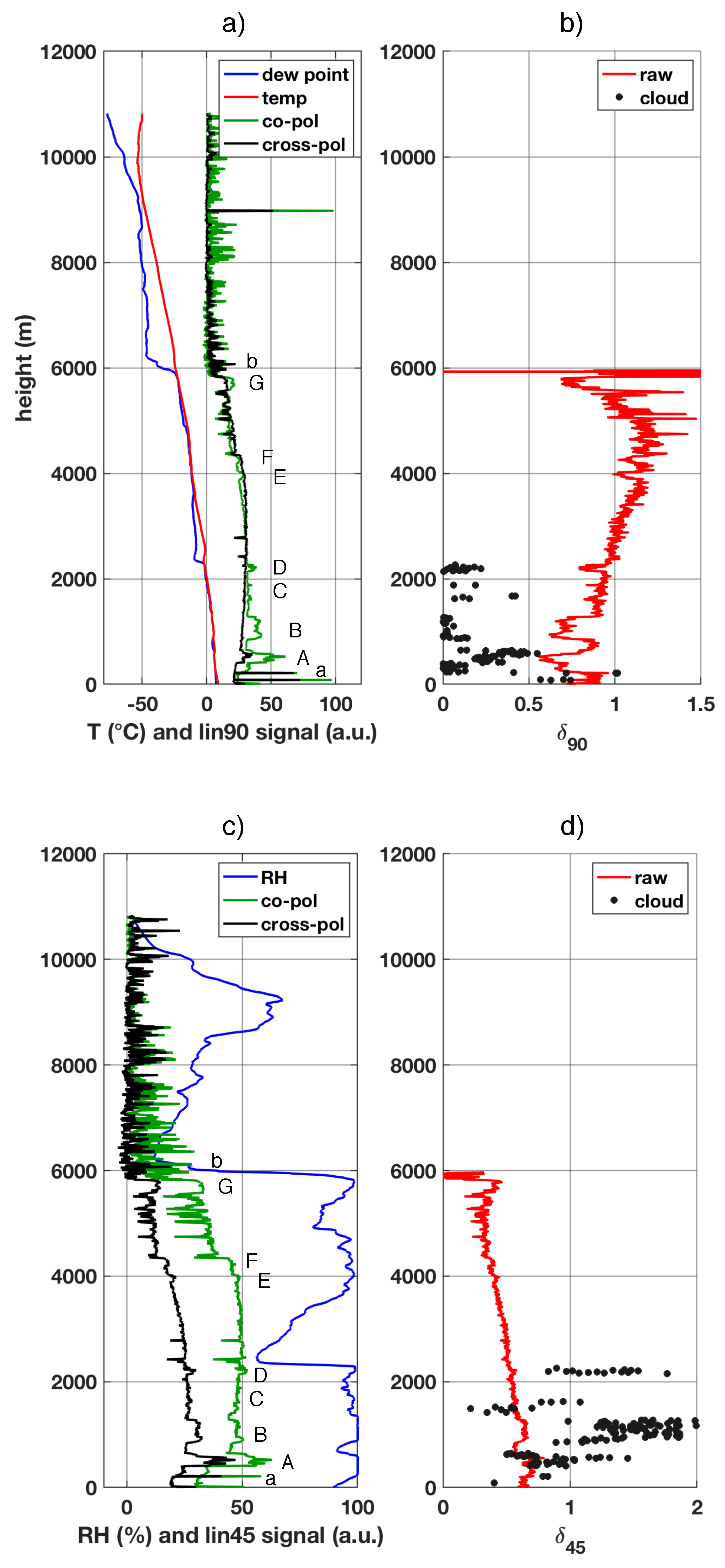
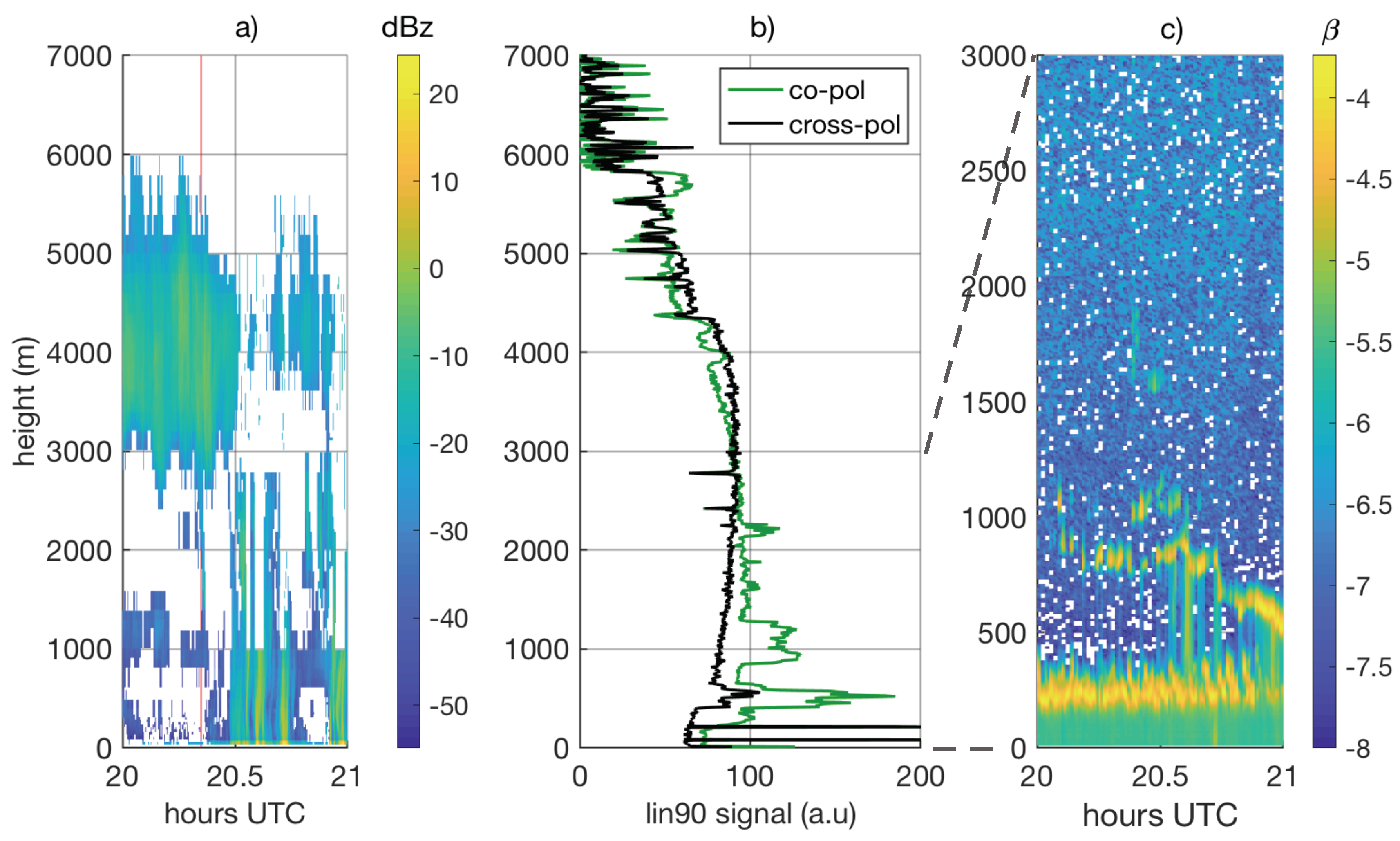
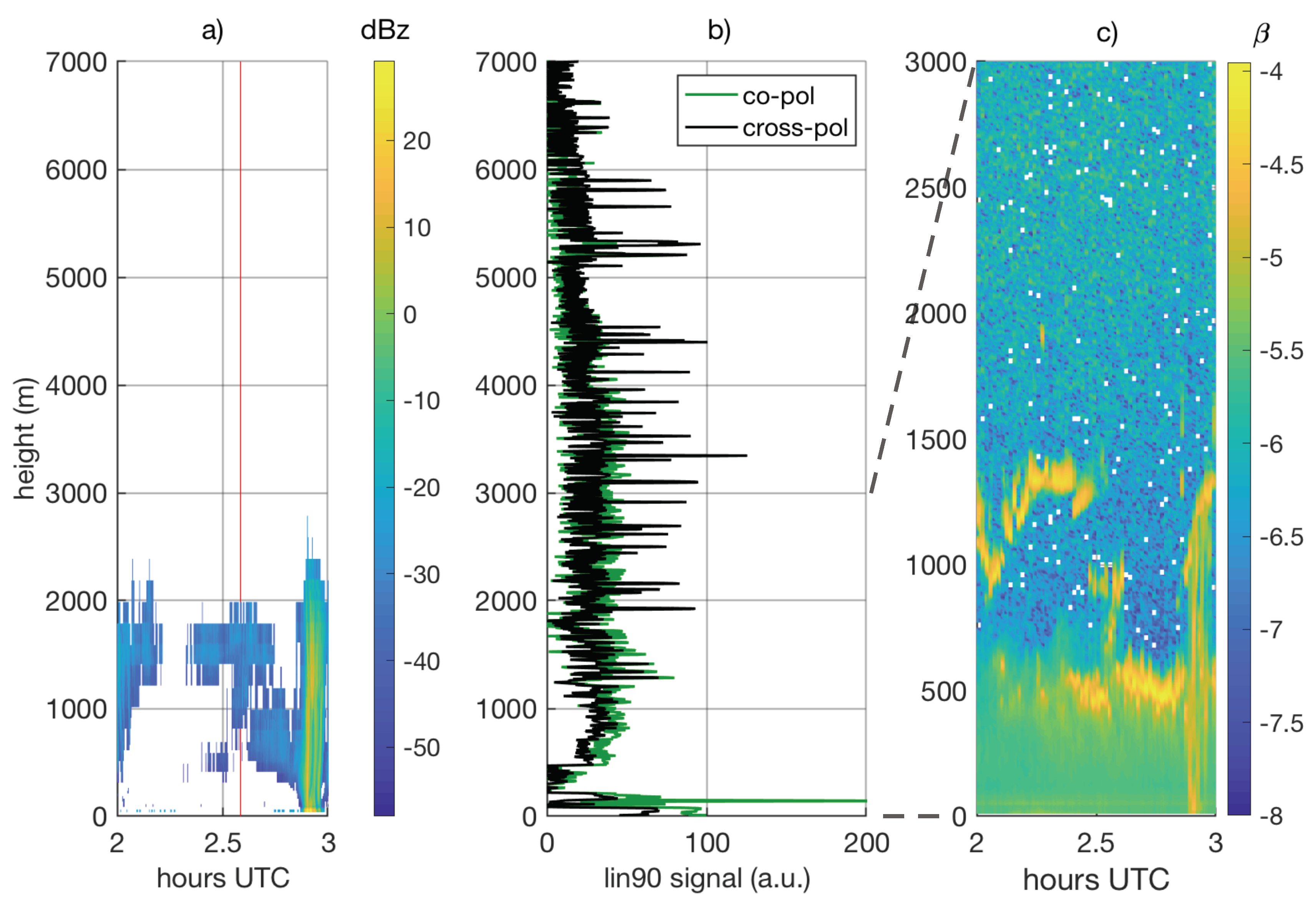
- a—there are three very sharp peaks in the polarsonde signal shortly after launch. These appear on both channels, though the second on the lin45 channel barely shows up. The first is likely due to the illumination of the ground or the balloon as the sonde package swings around on launch. The next two are attributed to the instrument passing through the exhaust plume from the station diesel power plant, which is wafting in the same general direction that the balloon takes, but with a slower ascent rate.
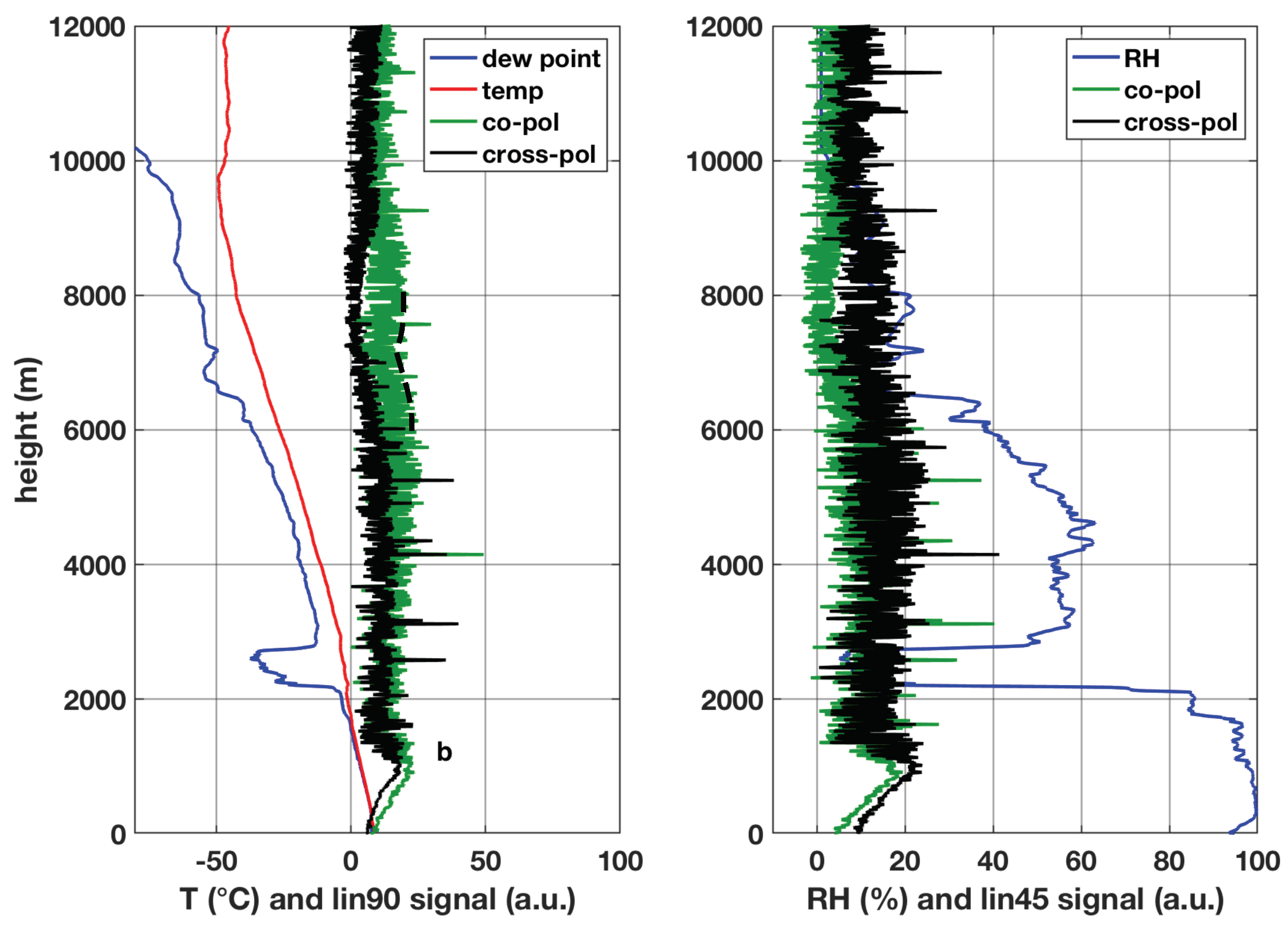
- b—at about 6000 m, the instrument emerges from the cloud top (of the top layer) into bright sunlight. As detailed in Appendix D, the sonde rotates below the balloon and it repeatedly points directly at the sun, and the extra resulting photocurrent leads to saturation of the preamplifier and thus gains compression of the modulated signal, leading to a “spikey” signal. While not desirable for detecting aerosol above the cloud, it does identify clearly the cloud top during the daytime.
- A—the instrument passes through a layer of cloud some 500 m thick, which seems to be composed of two sub-layers. The lower of these seems to comprised of only liquid droplets, there being no associated rise in the cross-polarised signal for lin90. The second (upper) sublayer gives a stronger signal, but notably the cross-polarised signal for lin90 rises. This indicates that, in addition to the background aerosol, there is insoluble, nonspherical aerosol entrained in this sublayer, which is otherwise liquid water cloud. Because the lin90 cross-polarised signal rises a little and falls in concert with the co-polarised signal, we infer that the background is due to aerosol and is not an instrumental artefact. In the lower sublayer, the cloud depolarisation is less than 0.2, but in the upper sublayer, it is closer to 0.5. This also implies that there is solid material entrained in this layer. However, the cloud plus aerosol depolarisation shows a very distinct dip even for the upper sublayer because the co-polarised signal rises more than the cross-polarised.
- B—a 500 m thick layer of cloud is encountered at about 1000 m height, but this layer is apparently only liquid water, with no insoluble particles entrained, because the cross-polarised lin90 signal shows no sign of this layer. Although there are apparently no aerosols entrained with this layer, the general background of aerosols is still present. Much of the discussion below centres on this layer. Note that with the background aerosol signal subtracted, and in agreement with the prediction of the Monte-Carlo model for spherical droplets.
- C—below 2000 m, a pair of thin liquid water layers appears. These show up also as small dips in .
- D—a more substantial layer of liquid water cloud appears at about 2200 m. In the graph of there is a very distinct dip, though the values of are somewhat more ambiguous and could arise through scattering by large plate-like ice crystals. Nevertheless, the lin90 co-polarised signal clearly rises while the cross-polarised does not, and in the lin45 signals, the co- and cross-polarised signals rise by similar amounts. The values of reflect this and confirm that the cloud particles are liquid. This layer is supercooled as the temperature is about −2. There is a temperature inversion immediately above this layer, where the temperature warms to −1 before falling again (monotonically up to the tropopause at about 10,000 m). Above this layer, the lower humidity implies that there is a clear patch with no cloud. However, the polarsonde signals remain high, indicating that the aerosol concentration is remaining at approximately the same level as below the melting level, at least up to 3500 m, where the reconvergence of the temperature and dew point indicate the base of the next cloud layer.
- E and F—at around 4000 m there are two layers of cloud that are more difficult to interpret; they appear to be two supercooled liquid layers as there is little change in the lin90 cross-polarised signal at the same height as the clear bumps in the co-polarised signal. This is also implied by the coincident dips in and the (small) increases in . Immediately above F at about 4400 m the two signals rise and fall together, which implies glaciated cloud. The dips in the signals between 4400 and 5000 m indicate that the cloud is in layers with rather small gaps (<50 m between them).
- G—the top layer of cloud begins at about 5700 m. Though it seems to be glaciated, it appears to have a lower depolarisation than the cloud between F and G, though this observation is at best qualitative due to the uncertainty in deciding what part of the signal is due to aerosol background and what is due to cloud.
4. Comparison with Radar and Ceilometer
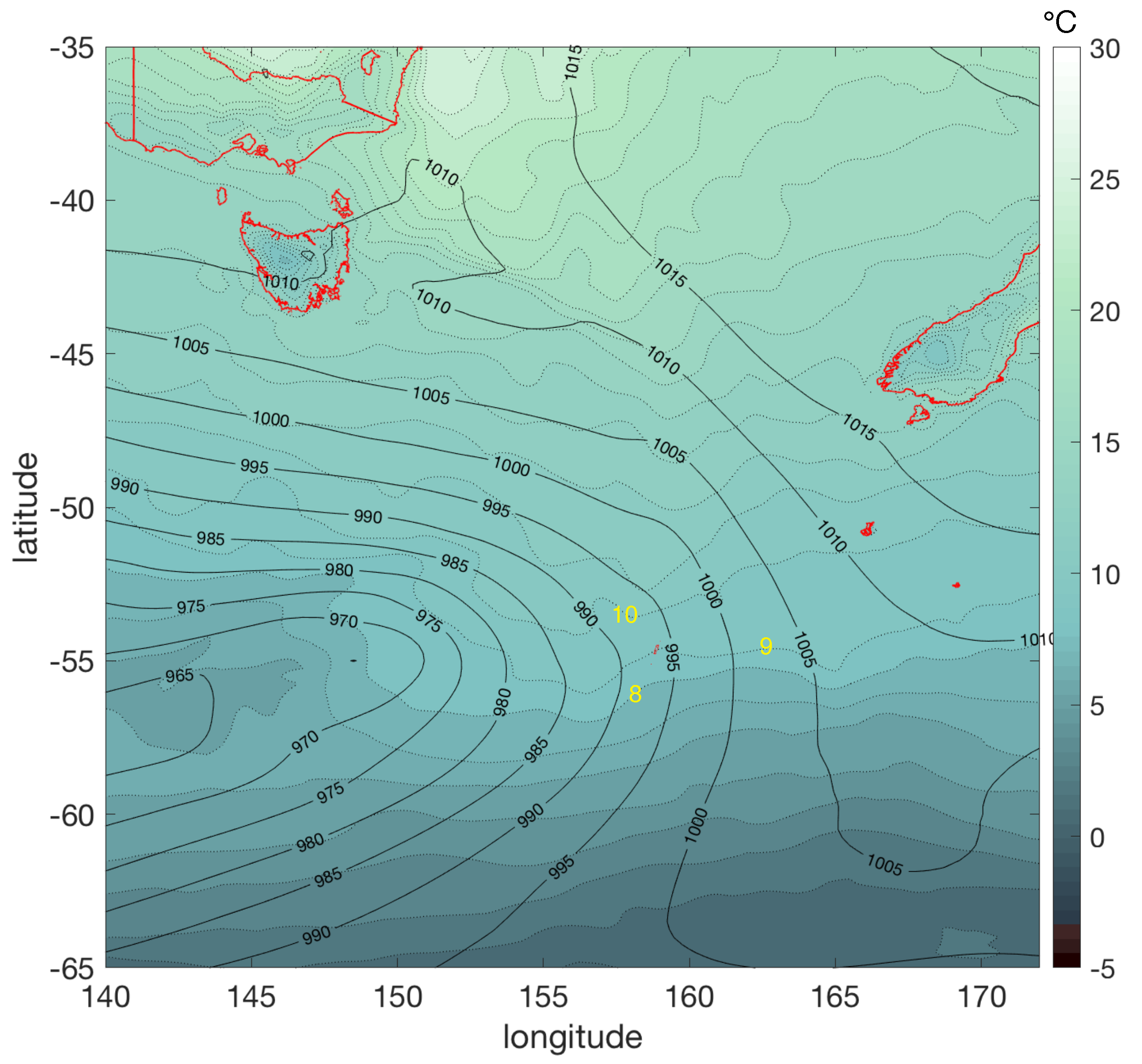
5. Satellite and Modelling Perspective
6. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Background Signal Checks
Appendix B. Wetting and Riming
Appendix C. Calibration
Appendix C.1. Relative Sensor Sensitivity
Appendix C.2. Sensitivity Calibration
Appendix C.3. Temperature Dependence
Appendix D. On the Spikey Behaviour of the Signal above the Cloud Top
References
- Bodas-Salcedo, A.; Hill, P.; Furtado, K.; Williams, K.; Field, P.; Manners, J.C.; Hyder, P.; Kato, S. Large contribution of supercooled liquid clouds to the solar radiation budget of the Southern Ocean. J. Clim. 2016, 29, 4213–4228. [Google Scholar] [CrossRef]
- Govekar, P.D.; Jakob, C.; Catto, J. The relationship between clouds and dynamics in Southern Hemisphere extratropical cyclones in the real world and a climate model. J. Geophys. Res. Atmos. 2014, 119, 6609–6628. [Google Scholar] [CrossRef]
- Kay, J.E.; Bourdages, L.; Miller, N.B.; Morrison, A.; Yettella, V.; Chepfer, H.; Eaton, B. Evaluating and improving cloud phase in the Community Atmosphere Model version 5 using spaceborne lidar observations. J. Geophys. Res. Atmos. 2016, 121, 4162–4176. [Google Scholar] [CrossRef]
- Mace, G.G. Cloud properties and radiative forcing over the maritime storm tracks of the Southern Ocean and North Atlantic derived from A-Train. J. Geophys. Res. 2010, 115, D10201. [Google Scholar] [CrossRef]
- Kanitz, T.; Seifert, P.; Ansmann, A.; Engelmann, R.; Althausen, D.; Casiccia, C.; Rohwer, E. Contrasting the impact of aerosols at northern and southern midlatitudes on heterogeneous ice formation. Geophys. Res. Lett. 2011, 38, L17802. [Google Scholar] [CrossRef]
- Mallet, P.-E.; Pujol, O.; Brioude, J.; Evan, S.; Jensen, A. Marine aerosol distribution and variability over the pristine Southern Indian Ocean. Atmos. Environ. 2018, 182, 17–30. [Google Scholar] [CrossRef]
- Alexander, S.P.; Protat, A. Vertical profiling of aerosols with a combined Raman-elastic backscatter lidar in the remote Southern Ocean marine boundary layer (43–66 S, 132–150 E). J. Geophys. Res. Atmos. 2019, 124, 12107–12125. [Google Scholar] [CrossRef]
- Carslaw, K.; Lee, L.; Reddington, C.; Pringle, K.; Rap, A.; Forster, P.; Mann, G.; Spracklen, D.V.; Woodhouse, M.T.; Regayre, L.A.; et al. Large contribution of natural aerosols to uncertainty in indirect forcing. Nature 2013, 503, 67–71. [Google Scholar] [CrossRef]
- Chubb, T.; Huang, Y.; Jensen, J.; Campos, T.; Siems, S.T.; Manton, M. Observations of high droplet number concentrations in Southern Ocean boundary layer clouds. Atmos. Chem. Phys. 2016, 16, 971–987. [Google Scholar] [CrossRef]
- Quinn, P.; Coffman, D.; Johnson, J.; Upchurch, L.; Bates, T.S. Small fraction of marine cloud condensation nuclei made up of sea spray aerosol. Nat. Geosci. 2017, 10, 674–679. [Google Scholar] [CrossRef]
- Veres, P.; Neuman, J.A.; Bertram, T.H.; Assaf, E.; Wolfe, G.M.; Williamson, C.J.; Weinzierl, B.; Tilmes, S.; Thompson, C.R.; Thames, A.B.; et al. Global airborne sampling reveals a previously unobserved dimethyl sulfide oxidation mechanism in the marine atmosphere. Proc. Natl. Acad. Sci. USA 2020, 117, 4505–4510. [Google Scholar] [CrossRef] [PubMed]
- Chubb, T.; Jensen, J.B.; Siems, S.T.; Manton, M.J. In situ observations of supercooled liquid clouds over the Southern Ocean during the HIAPER Pole-to-Pole Observation campaigns. Geophys. Res. Lett. 2013, 40, 5280–5285. [Google Scholar] [CrossRef]
- Mace, G. Protat, A Clouds over the Southern Ocean as Observed from the R/V Investigator during CAPRICORN. Part I: Cloud Occurrence and Phase Partitioning. J. Appl. Meteorol. Clim. 2018, 57, 1783–1803. [Google Scholar] [CrossRef]
- Protat, A.; Schulz, E.; Rikus, L.; Sun, Z.; Xiao, Y.; Keywood, M. Shipborne observations of the radiative effect of Southern Ocean clouds. J. Geophys. Res. Atmos. 2017, 122, 318–328. [Google Scholar] [CrossRef]
- Sato, K.; Inoue, J.; Alexander, S.P.; McFarquhar, G.; Yamazaki, A. Improved reanalysis and prediction of atmospheric fields over the Southern Ocean using campaign?based radiosonde observations. Geophys. Res. Lett. 2018, 45, 11406–11413. [Google Scholar] [CrossRef]
- McFarquhar, G.; Marchand, R.; Bretherton, C.; Alexander, S.; Protat, A.; Siems, S.; Wood, R.; DeMott, P. Measurements of Aerosols, Radiation, and Clouds over the Southern Ocean (MARCUS) Field Campaign Report; DOE/SC-ARM-19-008; Stafford, R., Ed.; ARM User Facility: Lamont, OK, USA, 2019. [Google Scholar]
- Hartery, S.; Toohey, D.; Revell, L.; Sellegri, K.; Kuma, P.; Harvey, M.; McDonald, A.J. Constraining the surface flux of sea spray particles from the Southern Ocean. J. Geophys. Res. Atmos. 2020, 125, e2019JD032026. [Google Scholar] [CrossRef]
- Wofsy, S.C.; Afshar, S.; Allen, H.M.; Apel, E.; Asher, E.C.; Barletta, B.; Bent, J.; Bian, H.; Biggs, B.C.; Blake, D.R.; et al. ATom: Merged Atmospheric Chemistry, Trace Gases, and Aerosols; Oak Ridge National Laboratory Distributed Active Archive Center: Oak Ridge, TN, USA, 2018. [Google Scholar] [CrossRef]
- Haynes, J.M.; Jakob, C.; Rossow, W.B.; Tselioudis, G.; Brown, J. Major Characteristics of Southern Ocean Cloud Regimes and Their Effects on the Energy Budget. J. Clim. 2011, 24, 5061–5080. [Google Scholar] [CrossRef]
- Huang, Y.; Siems, S.T.; Manton, M.J.; Hande, L.B.; Haynes, J.M. The Structure of Low-Altitude Clouds over the Southern Ocean as Seen by CloudSat. J. Clim. 2012, 25, 2535–2546. [Google Scholar] [CrossRef]
- Plummer, D.; Göke, S.; Rauber, R.; Di Girolamo, L. Discrimination of Mixed- versus Ice-Phase Clouds Using Dual-Polarization Radar with Application to Detection of Aircraft Icing Regions. J. Appl. Meteorol. Clim. 2010, 49, 920–936. [Google Scholar] [CrossRef]
- Hamilton, M. Optical design of low-cost polarimetric back-scatter sondes. Appl. Opt. 2018, 57, 4639–4648. [Google Scholar] [CrossRef]
- Yang, P.; Bi, L.; Baum, B.A.; Liou, K.-N.; Kattawar, G.W.; Mishchenko, M.I.; Cole, B. Spectrally Consistent Scattering, Absorption, and Polarization Properties of Atmospheric Ice Crystals at Wavelengths from 0.2 to 100 mm. J. Atmospheric Sci. 2013, 70, 330–347. [Google Scholar] [CrossRef]
- Copernicus Climate Change Service Climate Data Store (CDS). Copernicus Climate Change Service (C3S) (2017): ERA5: Fifth Generation of ECMWF Atmospheric Reanalyses of the Global Climate. Available online: https://cds.climate.copernicus.eu/cdsapp#!/home (accessed on 22 February 2020).
- Fossum, K.N.; Ovadnevaite, J.; Ceburnis, D.; Dall’Osto, M.; Marullo, S.; Bellacicco, M.; SimoiD, R.; Liu, D.; Flynn, M.; Zuend, A.; et al. Summertime Primary and Secondary Contributions to Southern Ocean Cloud Condensation Nuclei. Sci. Rep. 2018, 8, 13844. [Google Scholar] [CrossRef] [PubMed]
- Revell, L.; Kremser, S.; Hartery, S.; Harvey, M.; Mulcahy, J.P.; Williams, J.; Morgenstern, O.; McDonald, A.J.; Varma, V.; Bird, L.; et al. The sensitivity of Southern Ocean aerosols and cloud microphysics to sea spray and sulfate aerosol production in the HadGEM3-GA7.1 chemistry-climate model. Atmos. Chem. Phys. 2019, 19, 15447–15466. [Google Scholar] [CrossRef]
- Brooks, S.; Thornton, D.C.O. Marine Aerosols and Clouds. Annu. Rev. Mar. Sci. 2018, 10, 289–313. [Google Scholar] [CrossRef] [PubMed]
- McCluskey, C.S.; Hill, T.C.J.; Humphries, R.; Rauker, A.M.; Moreau, S.; Strutton, P.G.; Chambers, S.; Williams, A.; McRobert, I.; Ward, J.; et al. Observations of ice nucleating particles over Southern Ocean waters. Geophys. Res. Lett. 2018, 45, 11–989. [Google Scholar] [CrossRef]
- Cziczo, D.J.; Abbatt, J.P.D. Deliquescence, efflorescence, and supercooling of ammonium sulfate aerosols at low temperature: Implications for cirrus cloud formation and aerosol phase in the atmosphere. J. Geophys. Res. 1999, 104, 13781–13790. [Google Scholar] [CrossRef]
- Murayama, T.; Kaneyasu, N.; Kamataki, H.; Miura, K.; Okamoto, H. Application of lidar depolarization measurement in the atmospheric boundary layer: Effects of dust and sea-salt particles. J. Geophys. Res. 1999, 104, 31781–31792. [Google Scholar] [CrossRef]
- Humphries, R.; Klekociuk, A.R.; Schofield, R.; Keywood, M.; Ward, J.; Wilson, S.R. Unexpectedly high ultrafine aerosol concentrations above East Antarctic sea ice. Atmos. Chem. Phys. 2016, 16, 2185–2206. [Google Scholar] [CrossRef]
- Wang, Z.; Siems, S.T.; Belusic, D.; Manton, M.J.; Huang, Y. A Climatology of the Precipitation over the Southern Ocean as Observed at Macquarie Island. J. Appl. Meteorol. Clim. 2015, 54, 2321–2337. [Google Scholar] [CrossRef]
- Vaisala Radiosonde RS92 Humidity Measurement. Available online: https://www.wmo.int/pages/prog/www/IMOP/meetings/Upper-Air/Systems-Intercomp/Doc5 (accessed on 15 April 2020).
- Desai, N.; Glienke, S.; Fugal, J.; Shaw, R.A. Search for microphysical signatures of stochastic condensation in marine boundary layer clouds using airborne digital holography. J. Geophys. Res. Atmos. 2019, 124, 2739–2752. [Google Scholar] [CrossRef]
- Humphries, R. Personal Communication; CSIRO: Canberra, Australia, 2019. [Google Scholar]
- Downey, A.; Jasper, J.D.; Gras, J.J.; Whittlestone, S. Lower tropospheric transport over the Southern Ocean. J. Atmos. Chem. 1990, 11, 43–68. [Google Scholar] [CrossRef]
- Stein, A.; Draxler, R.R.; Rolph, G.D.; Stunder, B.J.B.; Cohen, M.D.; Ngan, F. NOAA’s HYSPLIT atmospheric transport and dispersion modeling system. Bull. Am. Meteorol. Soc. 2015, 96, 2059–2077. [Google Scholar] [CrossRef]
- Hamilton, M. Polarimetric Backscatter Sonde Profiles—Macquarie Island 2017, 1st ed.; Australian Antarctic Data Centre: Kingston, Australia, 2018. [Google Scholar] [CrossRef]
Sample Availability: The raw polarsonde data (including the radiosonde) are available publicly at the Australian Antarctic Data Centre [38]. |











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Launch Time | Position | Polarsonde | Himawari8 | Himawari8 | Radar CTH | Himawari8 Time |
|---|---|---|---|---|---|---|
| (Single Pixel) | (Pixel Average) | |||||
| 2020 | 54.76 S 159.0 E | 5900 m | 7447 m | 7260 ± 220 | 2040 | |
| 2020 | 54.50 S 158.94 E (stn) | 6383 m | 6530 ± 170 | 5500 m | 2020 | |
| 2320 | 54.6 S 159.0 E | 1300 m | 855 m | 856 ± 68 | 2330 | |
| 2320 | 54.50 S 158.94 E (stn) | 1008 m | 967 ± 48 | 1700 m | 2330 | |
| 0235 | 54.54 S 158.98 E | 1300 m | 1126 m | 1058 ± 51 | 0230 | |
| 0235 | 54.50 S 158.94 E (stn) | 1075 m | 1046 ± 107 | 2000 m | 0230 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamilton, M.; Alexander, S.P.; Protat, A.; Siems, S.; Carpentier, S. Polarimetric Backscatter Sonde Observations of Southern Ocean Clouds and Aerosols. Atmosphere 2020, 11, 399. https://doi.org/10.3390/atmos11040399
Hamilton M, Alexander SP, Protat A, Siems S, Carpentier S. Polarimetric Backscatter Sonde Observations of Southern Ocean Clouds and Aerosols. Atmosphere. 2020; 11(4):399. https://doi.org/10.3390/atmos11040399
Chicago/Turabian StyleHamilton, Murray, Simon P. Alexander, Alain Protat, Steven Siems, and Scott Carpentier. 2020. "Polarimetric Backscatter Sonde Observations of Southern Ocean Clouds and Aerosols" Atmosphere 11, no. 4: 399. https://doi.org/10.3390/atmos11040399
APA StyleHamilton, M., Alexander, S. P., Protat, A., Siems, S., & Carpentier, S. (2020). Polarimetric Backscatter Sonde Observations of Southern Ocean Clouds and Aerosols. Atmosphere, 11(4), 399. https://doi.org/10.3390/atmos11040399