The WVR brightness temperature measurement error and the WVR inversion error contribute the most to the standard deviation of the wet path delay difference measured by the water vapor radiometer. Any error in the WVR instrument translates into a brightness temperature error and then into a wet path delay error. The calibration of the WVR for this project consists of the following four steps:
(1) Absolute system calibration is performed once a month, which includes the tip curve procedure discussed below;
(2) Receiver gain error calibration is performed. Noise standard temperatures are applied to calibrate receiver gain fluctuations in conventional radiometer observations;
(4) Oblique path calibration is performed.
In the following, we analyze the different errors and their calibration results by experimental data.
3.1. Absolute Calibrations
It takes approximately 30 min for the system to reach temperature control after each re-energization. With a stable temperature, it is necessary to calibrate the entire system once a month, or, preferably, before each mission. The overall calibration can eliminate most of the errors of the radiometer hardware system at one time. The water vapor radiometer mainly uses an improved dumping method developed independently. Liquid nitrogen calibration, which can be performed in any weather, was not selected because the antenna was too large to design a convenient and feasible source of liquid nitrogen calibration. Tipping calibration is an important technique for the absolute calibration of ground-based microwave radiometers [
1]. A new tilt calibration method for ground-based microwave radiometers has been improved to eliminate the radiation from cloudy liquid water and to effectively calibrate the radiometers under cloudy sky conditions. Since the inclination calibration part has been published in [
10], we will not go into details here. Through extensive testing, we have verified the absolute calibration accuracy of the water vapor radiometer. The accuracy of the brightness temperature measurement can reach 0.2 K, even when the calibration is performed on a cloudy day.
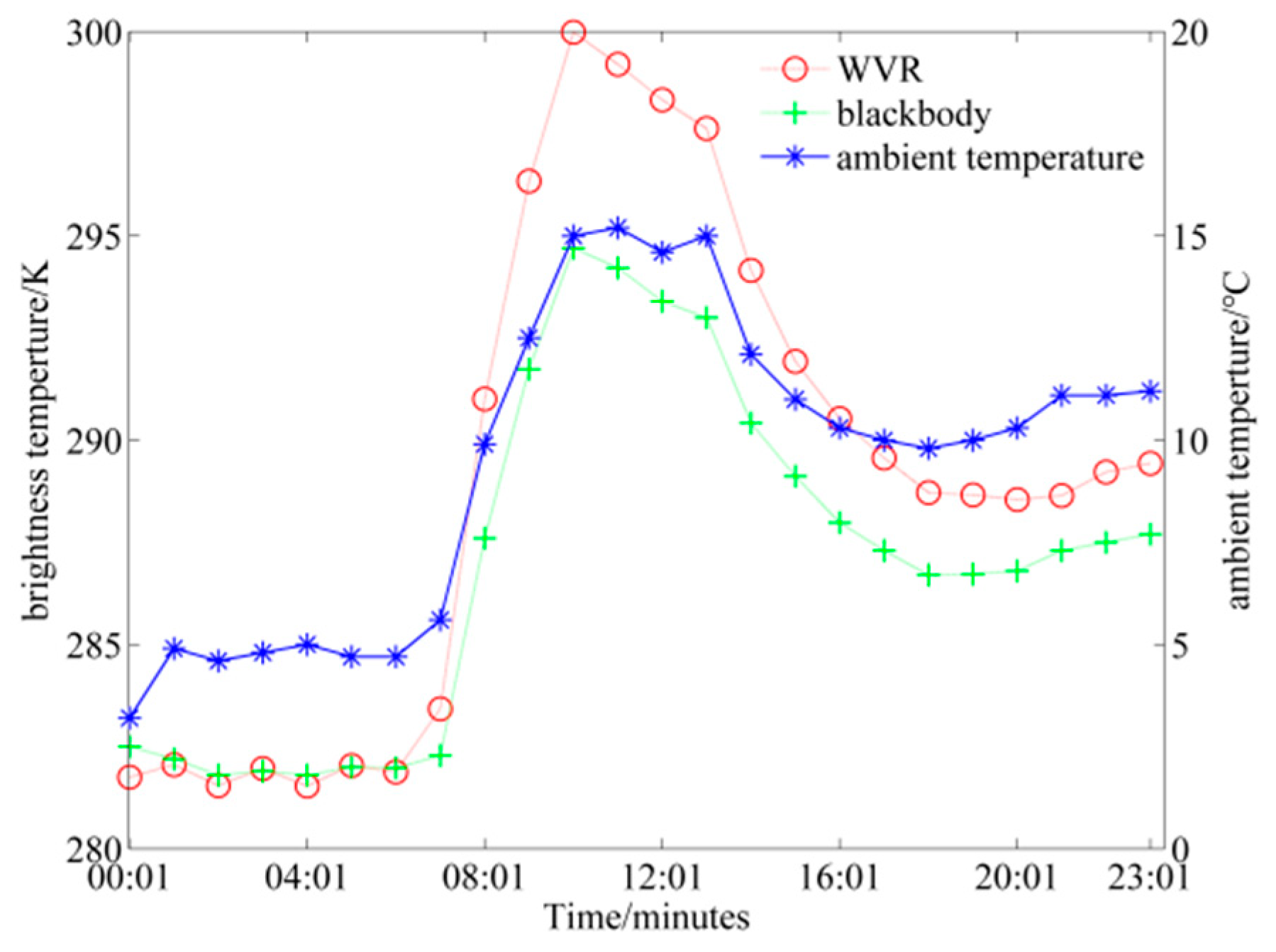
Since the absolute calibration can only guarantee the accuracy for a short time after the calibration is completed, in order to ensure a long-term stable measurement accuracy, the influence of the receiver gain, antenna system, and environmental factors must be considered. The following is a set of data. Tipping calibration was performed on the evening of 4 March 2017, followed by a 15-day observation experiment. The object observed on March 5 was a black body at room temperature, which was used to determine the accuracy of the brightness temperature measurement during the day. As shown in
Figure 3, the brightness temperature measured by the water vapor radiometer deviated from the measured blackbody brightness temperature when the ambient temperature changed. As can be seen from the figure, the difference between the measured value and the theoretical true value is quite small (approximately 0.2 K) when observing the blackbody reference source from early morning to 7:00 a.m., but, after 7:00 a.m., as the sun rises (change in ambient temperature), the measured value gradually deviates from the theoretical true value, reaching a maximum value of 6 K at 9:30 a.m., and then the error gradually decreases.
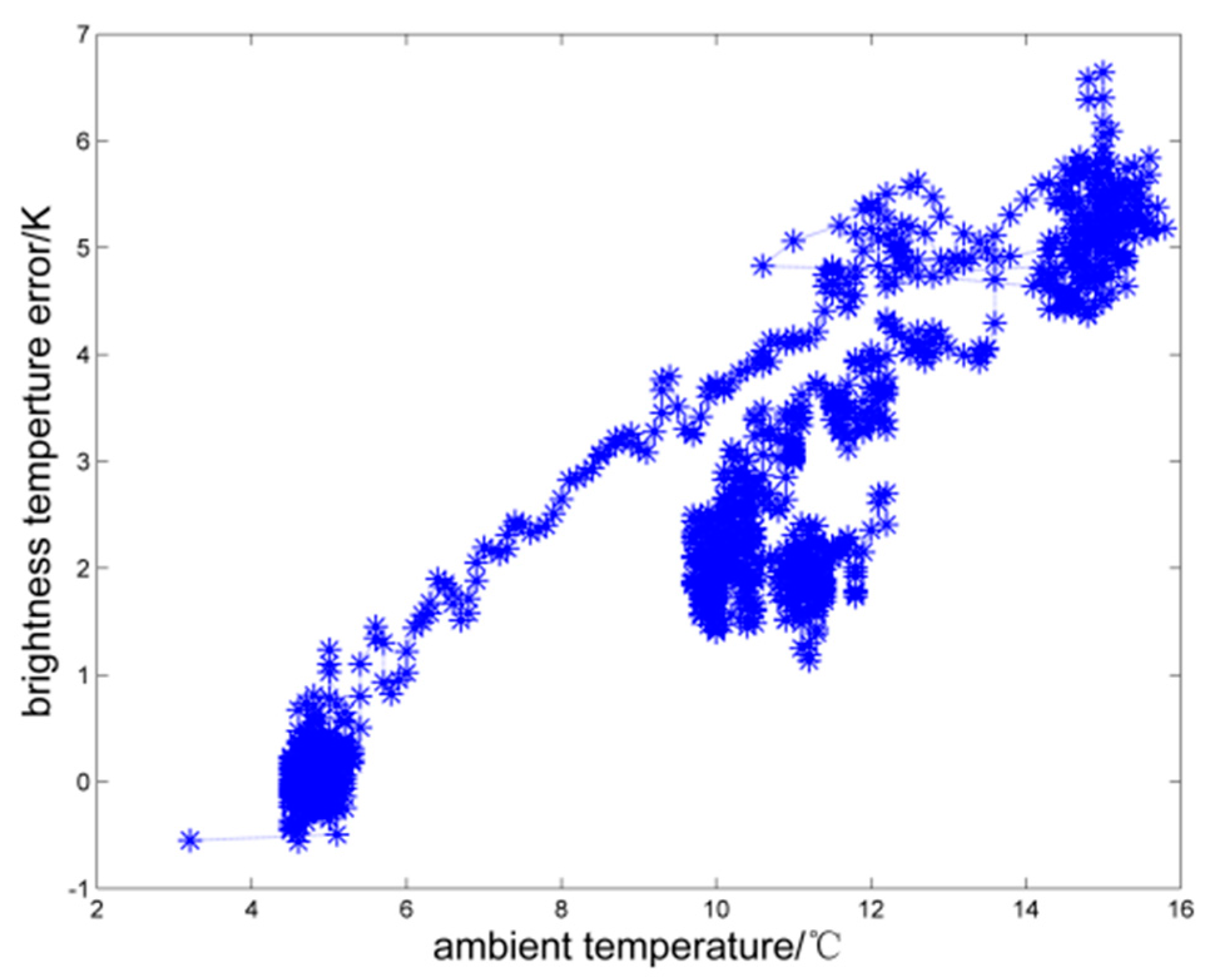
Figure 4 shows the relationship between the measurement error and the ambient temperature, and shows a clear correlation. Thus, the measurement error of the brightness temperature increases with the change in ambient temperature. The reason is that the change in ambient temperature will lead to fluctuations in the receiver gain and an increase in the antenna noise temperature. Later, we will discuss the errors caused by these cases and the approaches to eliminate them.
3.2. Receiver Gain Error Calibration
The effect of gain fluctuations on the stability of water vapor radiometers is direct and decisive. The water vapor radiation brightness temperature is usually tens of Kelvin. The total gain of the amplification link of the radiometer receiver is often more than 80 dB. In long-term operation, the gain fluctuation can easily exceed 1 dB. Therefore, the gain drift on the radiometer stability is very obvious, and must be suppressed in some way. The receiver gain drift is mainly caused by active devices (amplifiers and mixers), and active devices are mainly caused by changes in the ambient temperature. Gain drift with temperature (referred to as temperature drift) is an inherent characteristic of active devices and a key issue in RF circuit design. The receiver module of modern radiometers is usually placed in a constant temperature structure to ensure the stability of the amplifier’s ambient temperature. Despite this, the receiver gain can still drift, resulting in 1 K level errors. Periodic correction methods are needed in order to reduce the drift error.
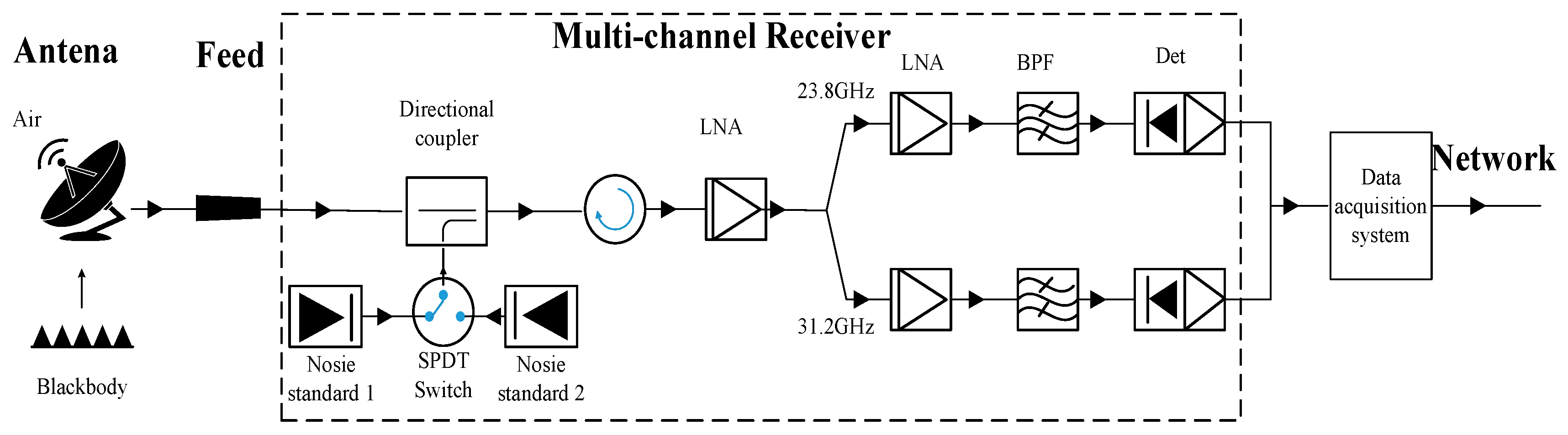
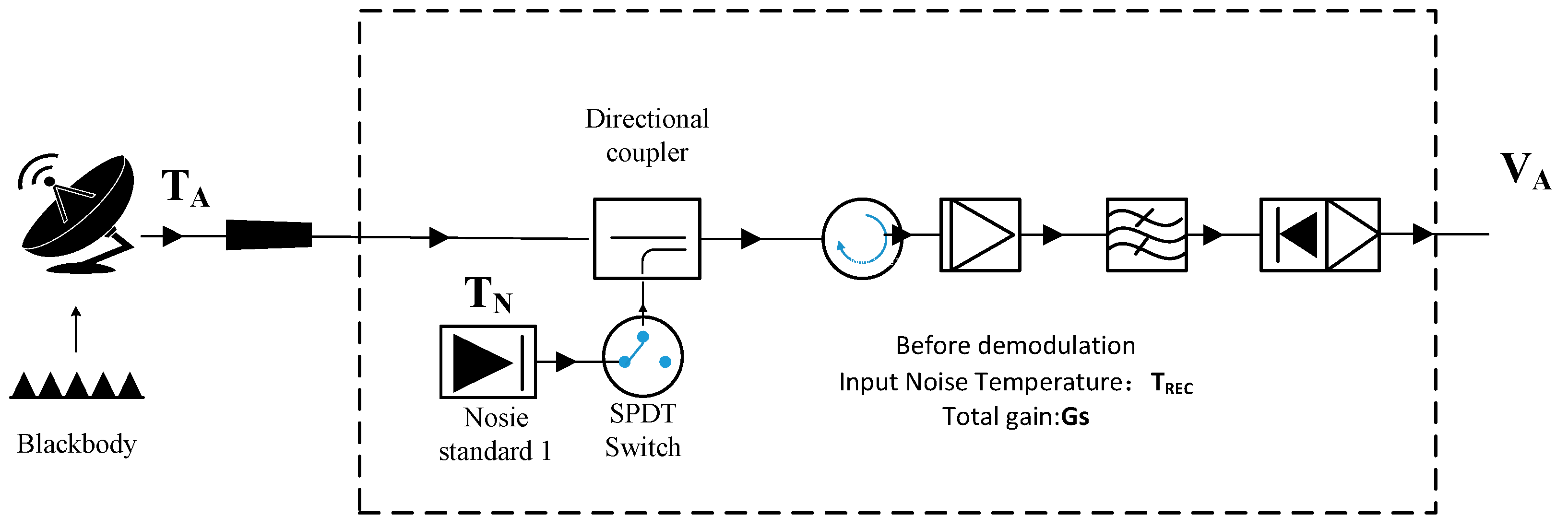
Noise injection correction is currently a commonly used method, where noise power provided by a highly stable noise source is coupled to the antenna channel, and noise injection is controlled by the RF switch. This correction can be performed automatically at any time, so the gain fluctuation of the receiver can be corrected in real time. The noise injection radiometer is shown in
Figure 5.
During measurement, the RF switch is periodically switched on and off to control the injection of noise.
(a) During the period when the noise source is turned off, the measurement equation is as follows:
where
TA is the input radiation brightness temperature of the antenna port,
TREC is the noise temperature of the system,
GS is the total gain of the system, and
VA is the output voltage value of the system after square-rate detection;
(b) During the period when the noise source is turned on, the measurement equation is as follows:
where
TN is the temperature of the standard noise (reference noise), and
VAN is the output voltage value of the system when adding noise.
Combining Equations (1) and (2), we obtain
VN is the output voltage of standard noise (reference noise), which can be obtained by subtracting the input voltage VA from the output voltage VAN.
The gain obtained by Equation (3) can be compared with the gain at the time of calibration to obtain the change in gain for correction in the final measurement results. This is a real-time gain correction method. From Equation (3), it can be seen that the accuracy of gain measurement depends on the stability of the noise source TN. Therefore, a high stability noise source is generally selected and placed in a constant temperature structure to maintain the stability of the noise output.
In practice, the gain of the receiving system and the input noise temperature will change. Assume that the gain of the system is
GS0 and the noise temperature is
TREC0 when the standard is just set. In the actual measurement, the gain of the system is
GSi and the noise temperature is
TRECi. According to Equation (3), the following equation can be obtained.
where
VN0 is the input voltage of the reference noise source at the calibration time, and
VNi is the input voltage of the reference noise source at the actual measurement time.
Then, we have the following,
Since the value of
GS0 and
TREC0 have been obtained and saved in the calibration, as long as the value of
is obtained, the brightness temperature
TAi at the measured voltage value of
VAi can be computed. For convenience, the change in
TREC is ignored here, i.e., assuming that
, the estimated value of
will be discussed in
Section 3.3.
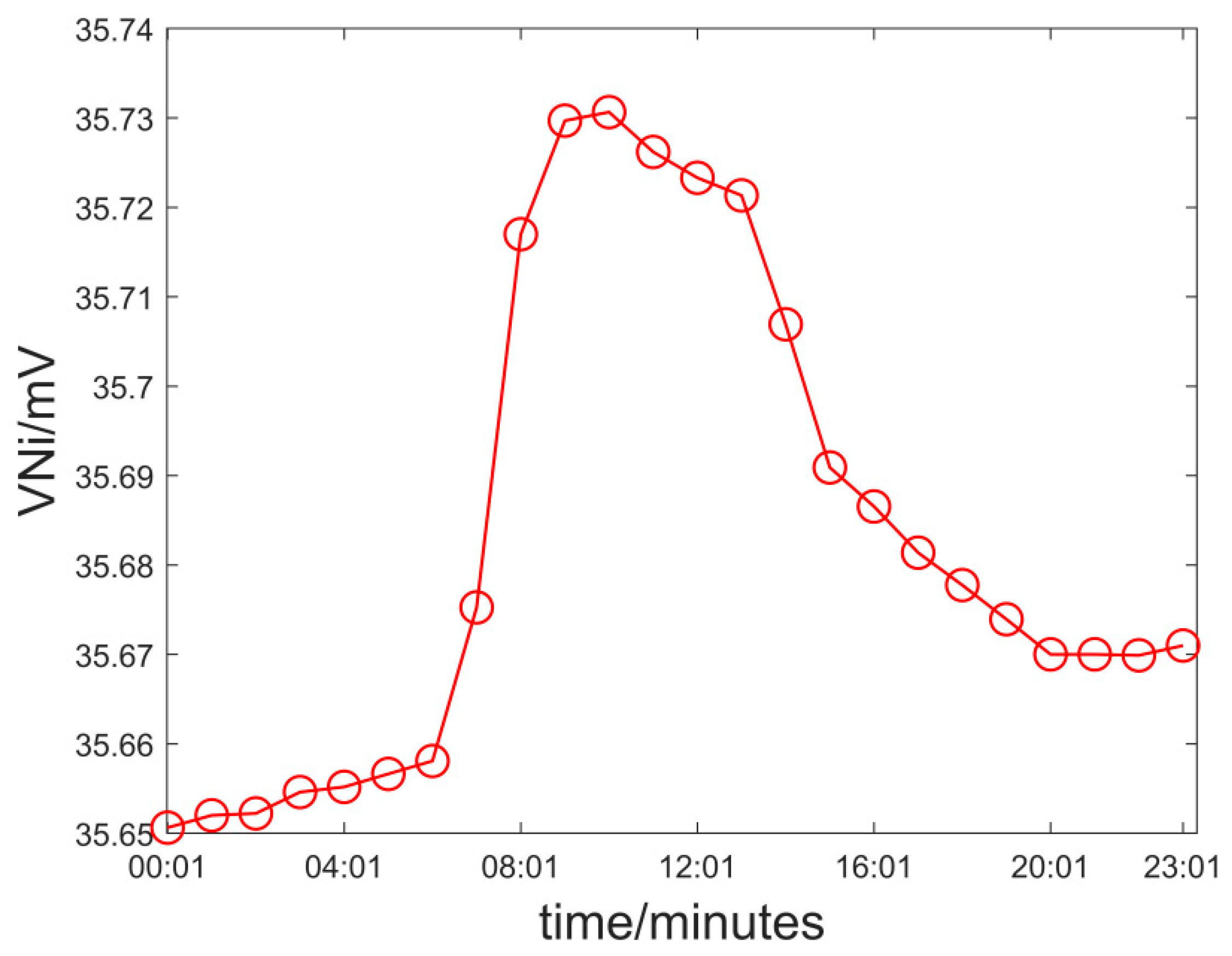
Figure 6 shows the variation of
VNi on 5 March 2017.
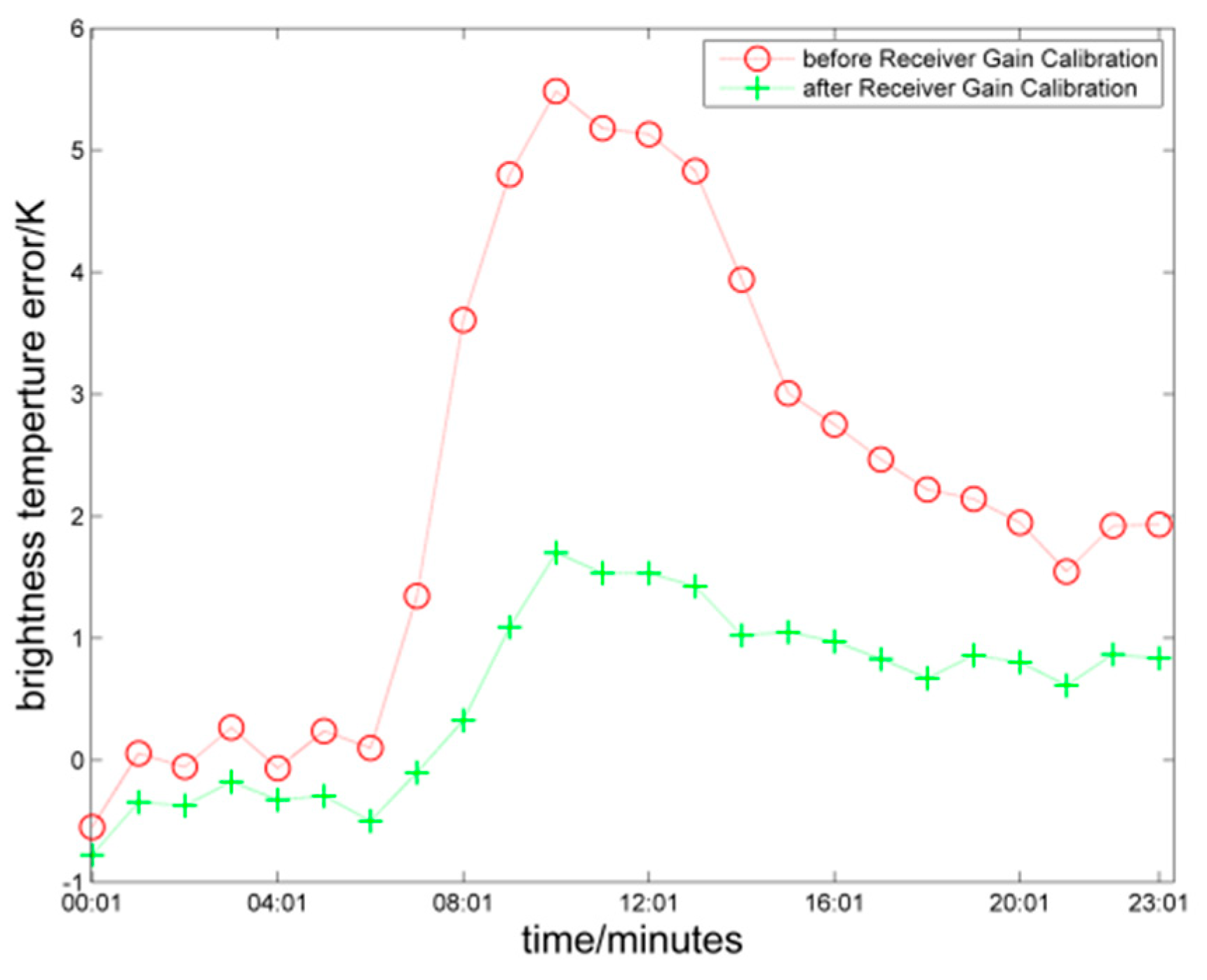
Figure 7 shows the measurement results of the blackbody after receiver gain error calibration. It can be seen from the figure that the error of measurement of the blackbody after receiver gain calibration is reduced by nearly 1 K at the maximum fluctuation of gain.
3.3. Temperature Noise Error of Antenna Feeder System
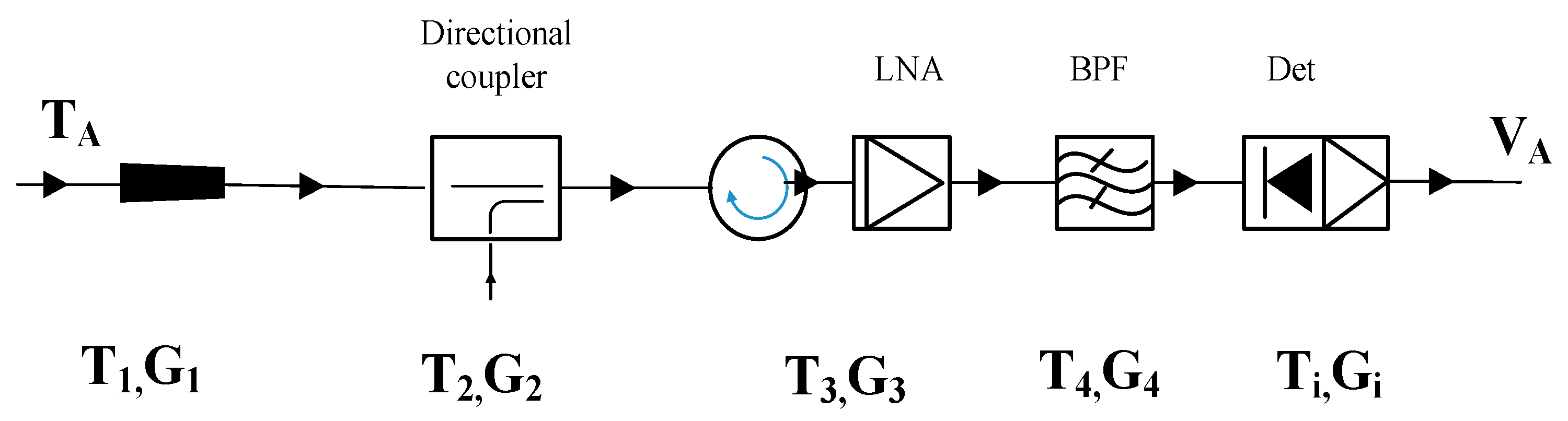
The following figure shows the noise error contribution of each component of the radiometer receiving system. The noise error after the antenna feeder can be compensated by the receiver gain error calibration method, as described in
Section 3.2. However, since the noise source power enters the signal path after the feeding horn, it is impossible to correct the luminance temperature error introduced by the non-thermally stable feeding horn using the noise standard calibration method. An important system noise contribution is related to the antenna feed system.
Figure 8 shows the noise contribution of each component of the WVR system. The system noise temperature converted to the input end is:
As shown in
Figure 9, the noise temperature of the antenna
T1 has a great impact on the noise temperature of the entire system, and the subsequent gain
G is large enough. A typical loss of a waveform feedforward horn running at 20~30 GHz is less than
L = 1 dB. When the physical temperature of the feedforward horn changes by 10 °C, the system noise increases by approximately 2 K, resulting in the absolute brightness temperature error of 2 K.
Therefore, the best way is to keep the antenna system at a constant temperature like the receiver. However, because the WVR antenna used in this project is large and exposed, it is difficult to keep the antenna at a constant temperature. Therefore, the temperature measurement probe can only be installed near the feeder in order to test the temperature variation of the antenna, thus eliminating this error.
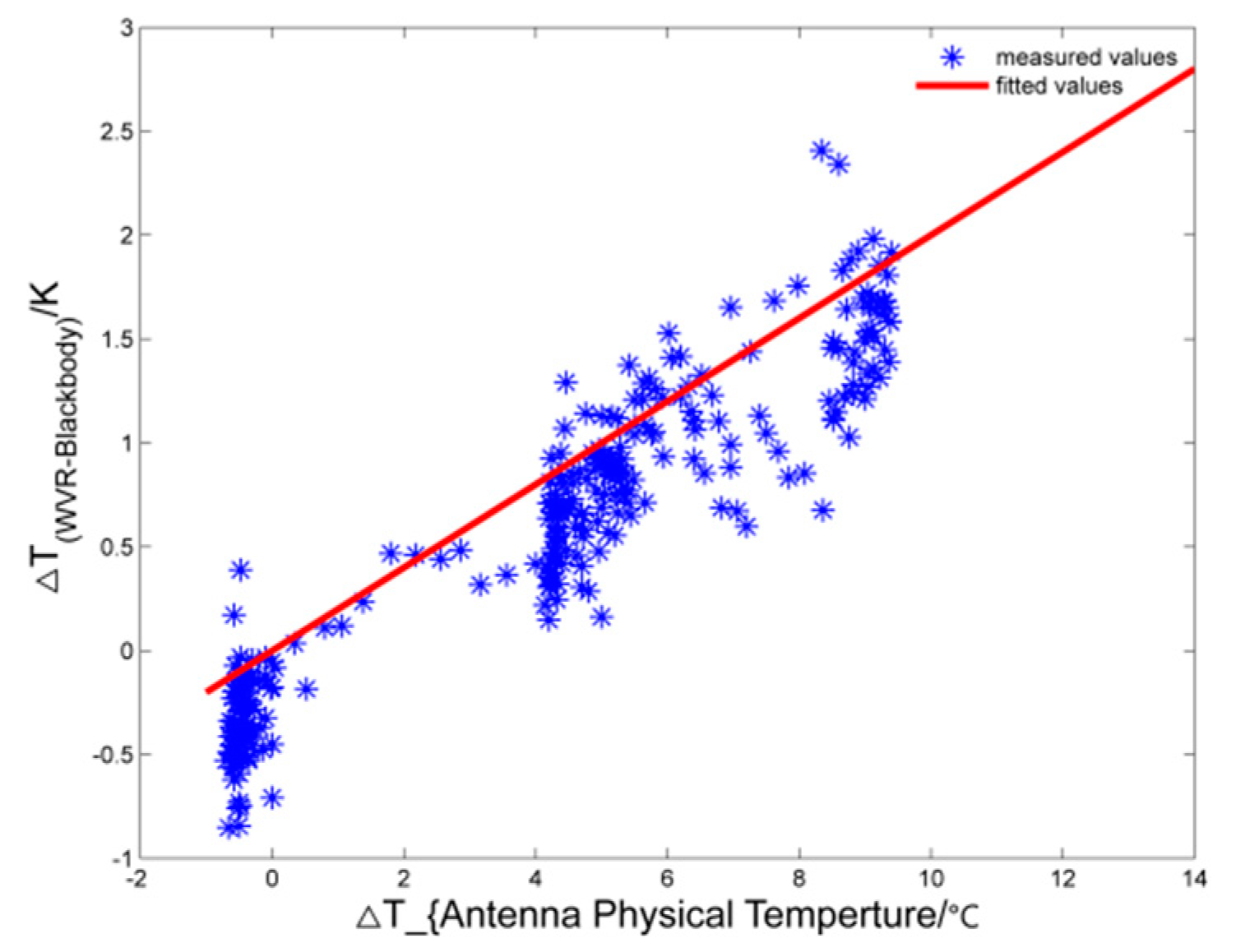
Figure 9 shows the relationship between the measured feed temperature and the difference between the measured WVR and the blackbody temperature. The measured values show that there is a clear linear relationship between them. By fitting a large number of measurements, the following relationship can be obtained:
This relationship is very consistent with the previous analysis, where the measurement brightness temperature error of 2 K is caused by a 10 °C change in the feed temperature. Therefore, we need to add the error correction of the antenna and feeder to the final output brightness temperature. Combining Equations (5) and (6), the following equations can be obtained:
where
TAi′ is the output bright temperature value data of the
i-th group after correction of the antenna error, and
is the measured physical temperature data at the feed source of the
i-th group.
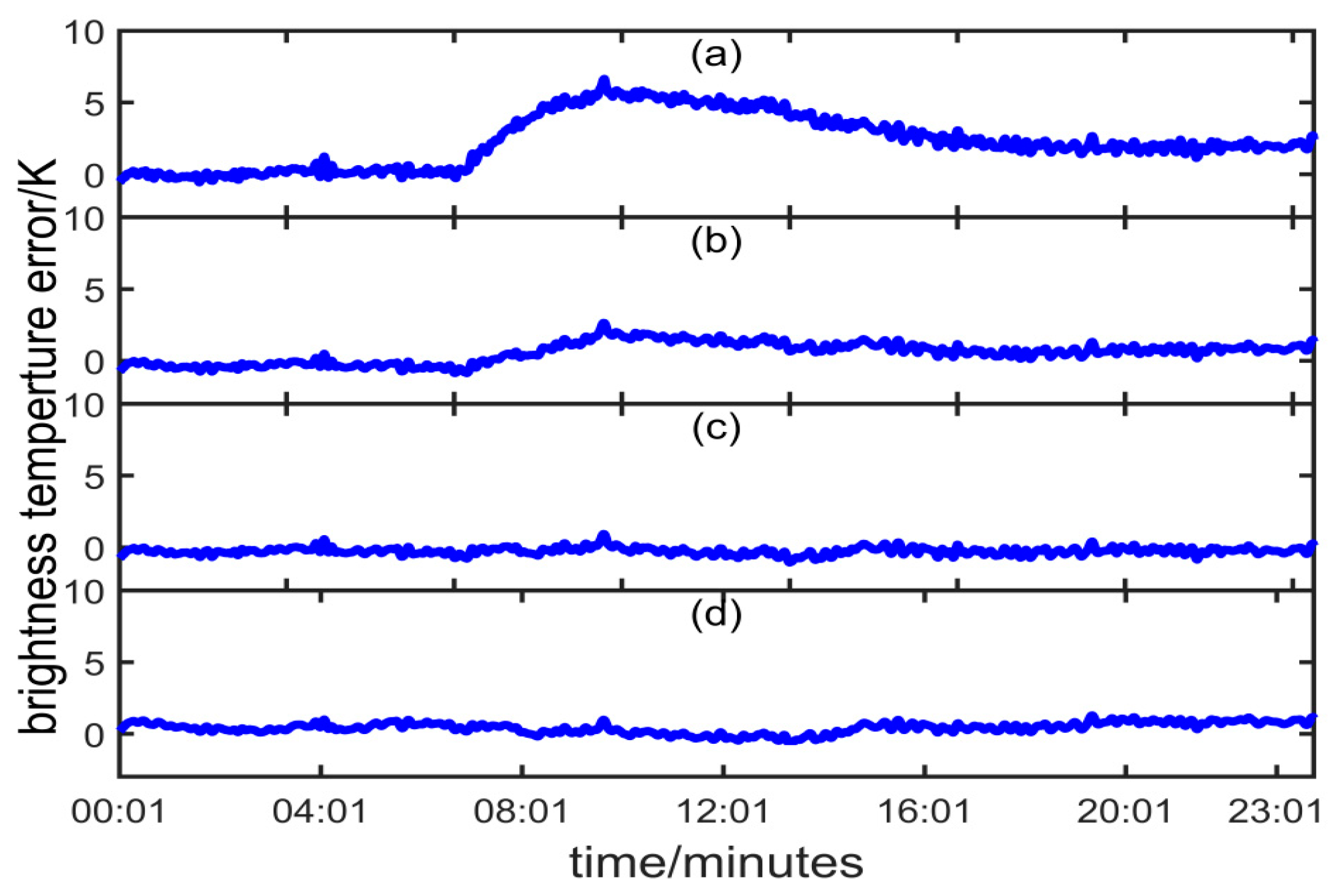
In summary, the measured data on 4 March 2017 were calibrated by using the three calibration methods described above. The results are shown in
Figure 10, where
Figure 10a shows the measurement error without calibration,
Figure 10b shows the measurement error after system absolute calibration,
Figure 10c shows the measurement error after receiver gain error calibration, and
Figure 10d shows the measurement error after calibration of the temperature noise error of the antenna feeder system.
After the above three calibrations, the brightness temperature measurement accuracy of the vapor radiometer in the zenith direction can reach 0.2 K in a one-month scale (root mean square error) and 0.05 K in a 1000 s scale.
3.4. Oblique Path Calibration
As the measurement elevation angle decreases, the measurement accuracy of the microwave radiometer also decreases due to the effect of background noise on the main and side flaps of the antenna. There has been a challenge in evaluating the measurement accuracy of the microwave radiometer at low elevation angles and correcting the errors at low elevation angles. In this paper, based on the characteristics of atmospheric optical thickness, we investigate the optical thickness law calculated by using the brightness temperature measured by the microwave radiometer, and give an accurate evaluation of the measurement capability of the microwave radiometer at a low elevation angle indirectly.
According to the atmospheric transmission theory, the optical thickness of different zenith angles under clear weather is linearly related to the tangent of the zenith angle.
The optical thickness of each zenith angle can be computed as:
where
is the average radiant light temperature of the atmosphere at elevation
, and
is the radiant light temperature of the sky at elevation
and azimuth
. The average radiant temperature of the atmosphere can be given by an empirical formula, and the radiant brightness temperature of the sky can be measured by a radiometer.
This is illustrated below by an observation experiment in April 2017 that was carried out in an open area with clear weather. In the experiment, an inclination calibration was first successfully performed, which ensured the accuracy of the brightness temperature data in the zenith direction.
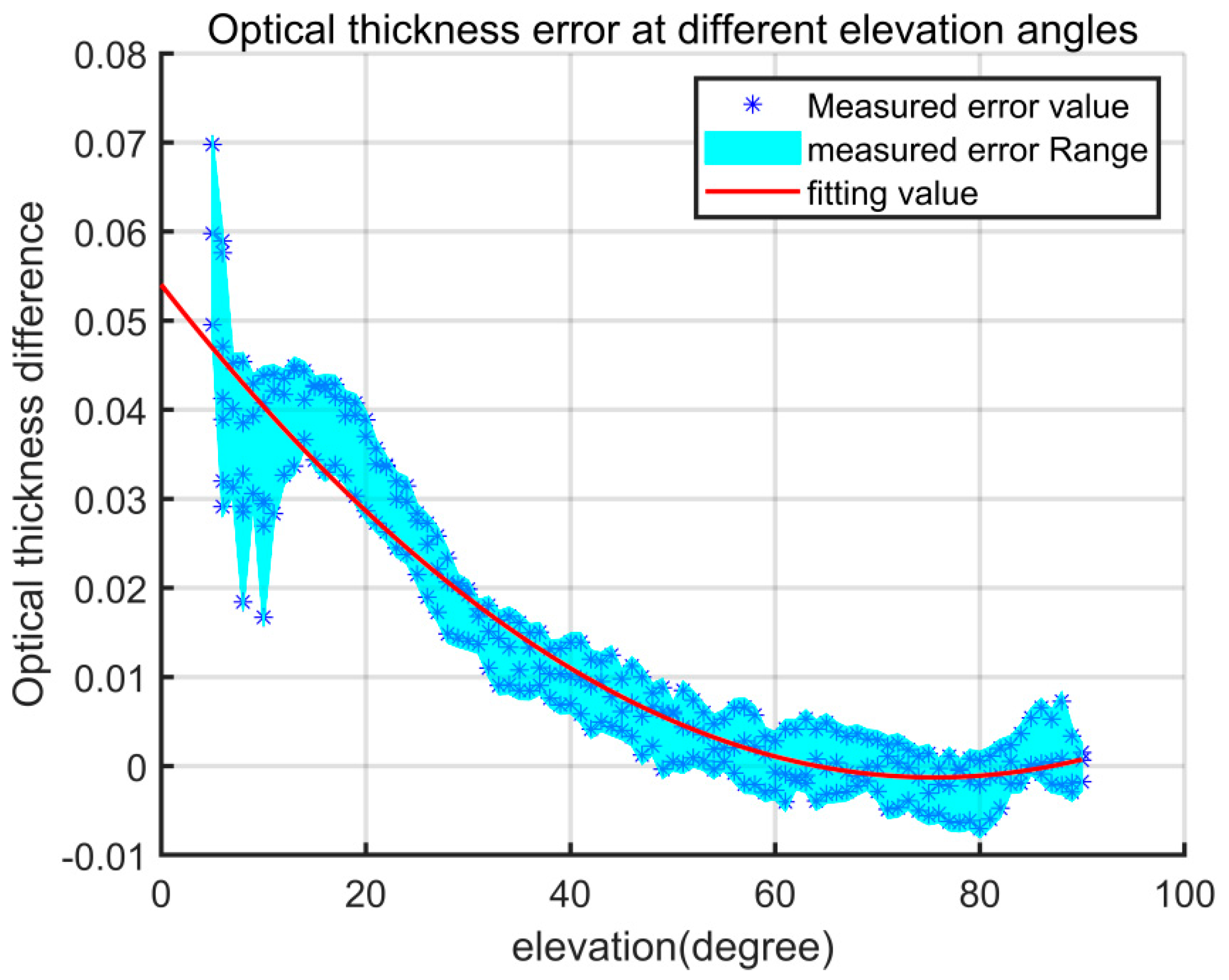
Figure 11 compares the measured optical thickness and the calculated theoretical optical thickness from an elevation angle of 5° to 90°. The measured optical thickness is measured by scanning the brightness temperature at different elevation angles and is calculated by Equation (8). The theoretical optical thickness is calculated from radiosonde data at the same address. From
Figure 11, we found that:
(1) The measured optical thickness of the WVR is very close to the theoretical optical thickness when the elevation angle is greater than 60 degrees. Therefore, the brightness temperature measurements at elevation angles of 60–90 degrees are less influenced by external factors, such as sidelobes and the curvature of the Earth, without considering other factors. It can be considered that the measurement error is within an acceptable range;
(2) At elevation angles of 5 to 60 degrees, the smaller the variation of the optical thickness with elevation angle, the larger the deviation from the theoretical value. At an elevation angle of 10 to 60 degrees, the deviation has a certain relationship with the elevation angle, and the relationship can be fitted with a quadratic curve. At elevation 5 to 10 degrees, there seems to be little regularity in the deviation, which may be due to the influence of the ground feature.
Generally, when using WVR, VLBI uses data above 10 degrees. Therefore, in a practical measurement, we fit the law of optical thickness deviation by a large number of measured data, which can be used to correct the influence of the inclined path on the brightness temperature at an elevation angle of 10–90 degrees. By measuring the brightness temperature of different azimuths and elevations, we calculate and establish the measured optical thickness matrix, and then calculate the optical thickness deviation matrix. In this way, we can use the optical thickness deviation matrix to correct the brightness temperature values of different azimuths and elevations in the oblique path measurement, which greatly improves the brightness temperature measurement accuracy at lower elevations. The measurement airspace is divided into grids of 10 degree azimuth intervals and 1 degree pitch intervals, and the optical thickness deviation matrix
is established as Equation (9), where
represents the optical thickness deviation of the antenna pointing at azimuth angle
and elevation angle
. In general, VLBI uses data above 10 degrees when using WVR. Therefore, in the actual measurement, we fit the law of optical thickness deviation by a large amount of measured data, which can be used to correct the effect of the tilted path on the brightness temperature at elevation angles of 10–90 degrees. By measuring the brightness temperature at different azimuth and elevation angles, we calculate and build the measured optical thickness matrix, and then calculate the optical thickness deviation matrix. In this way, we can use the optical thickness deviation matrix to correct the brightness temperature values of different azimuth angles and elevations in the oblique path measurement, thus greatly improving the brightness temperature measurement accuracy at low elevations. The measurement airspace is divided into grids of 10 degree azimuth intervals and 1 degree pitch intervals, and the optical thickness deviation matrix
is established as Equation (9), where
represents the optical thickness deviation of the antenna pointing at azimuth angle
and elevation angle
. After the optical thickness at different elevation angles is measured,
(the fitting value) can be obtained through binary primary regression.
According to Equation (12),
Then, we obtain,
where
is the bright temperature after the correction of the oblique path,
is the original bright temperature measured, and
can be calculated through the empirical model.
After the step-by-step correction of the methods in
Section 3.1,
Section 3.2,
Section 3.3 and
Section 3.4, we have achieved an accuracy of 20 mm (10 degrees above elevation) of the oblique path wet delay measurement. The error comparison method uses a two-station VLBI system to measure two stars with known precise positions in order to obtain more accurate atmospheric delays by the difference method. The related experimental procedure and results will be discussed in the follow-up papers.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}