
In Situ, Rotor-Based Drone Measurement of Wind Vector and Aerosol Concentration in Volcanic Areas

Abstract
:1. Introduction
2. Materials and Methods
2.1. Reseach Platform: Drone and Sensors
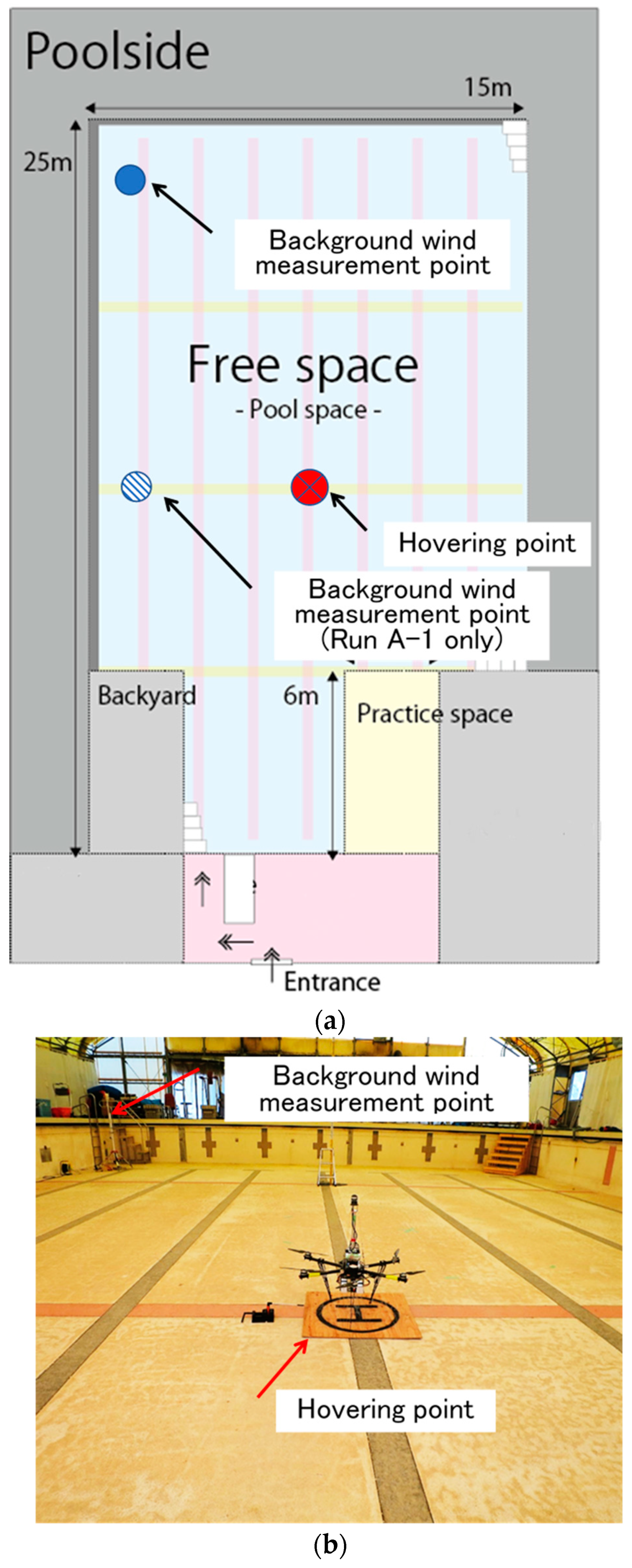
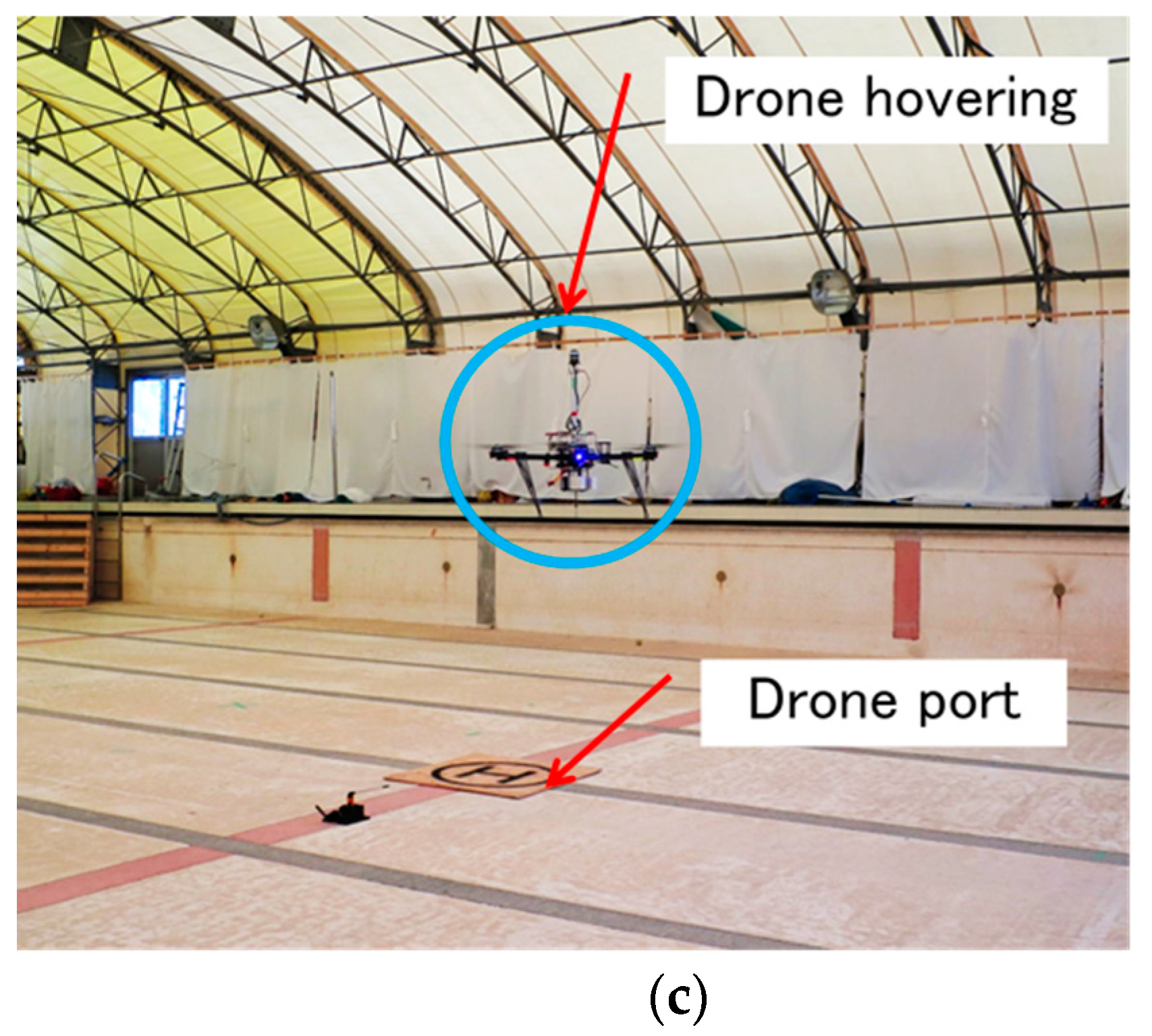
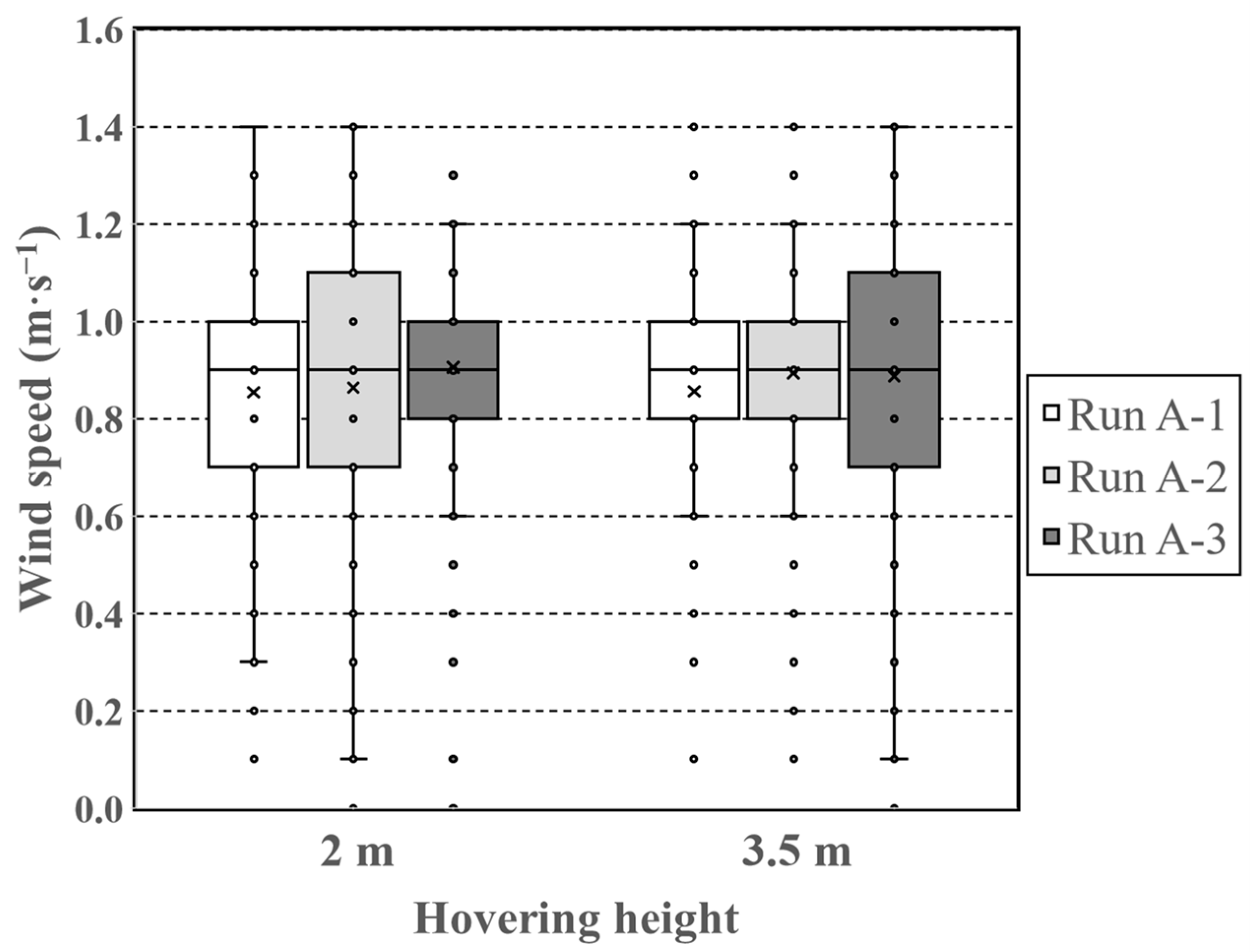
2.2. Preliminary Experiments
2.3. Field Observations
3. Results and Discussion
3.1. Preliminary Experiments
3.2. Field Observations
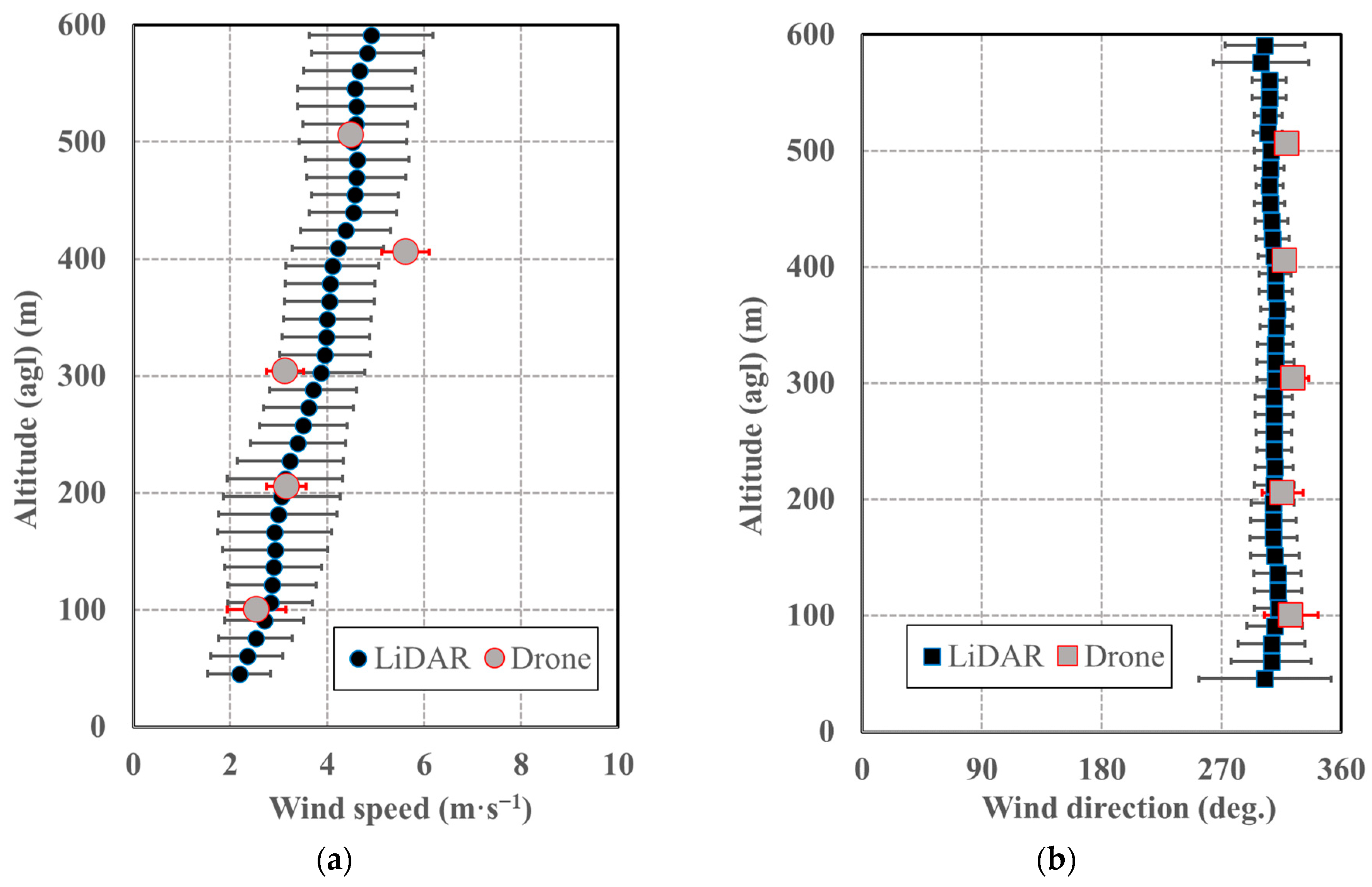
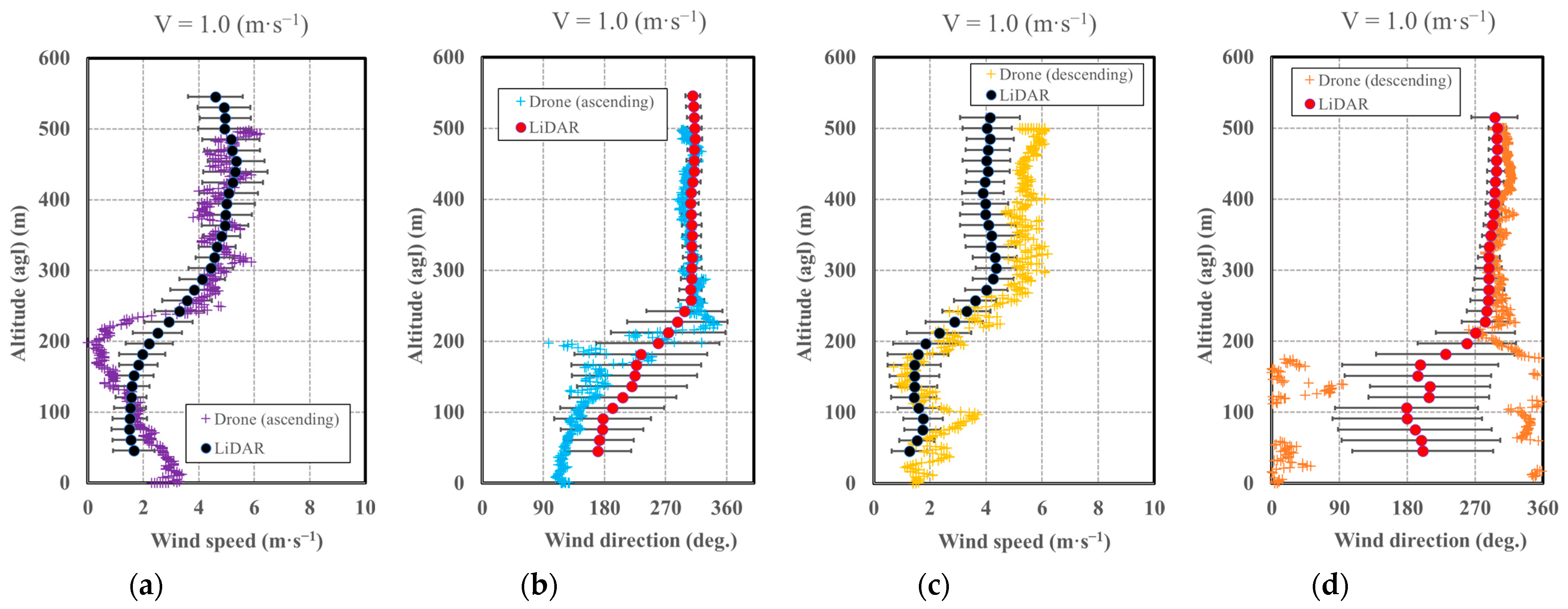
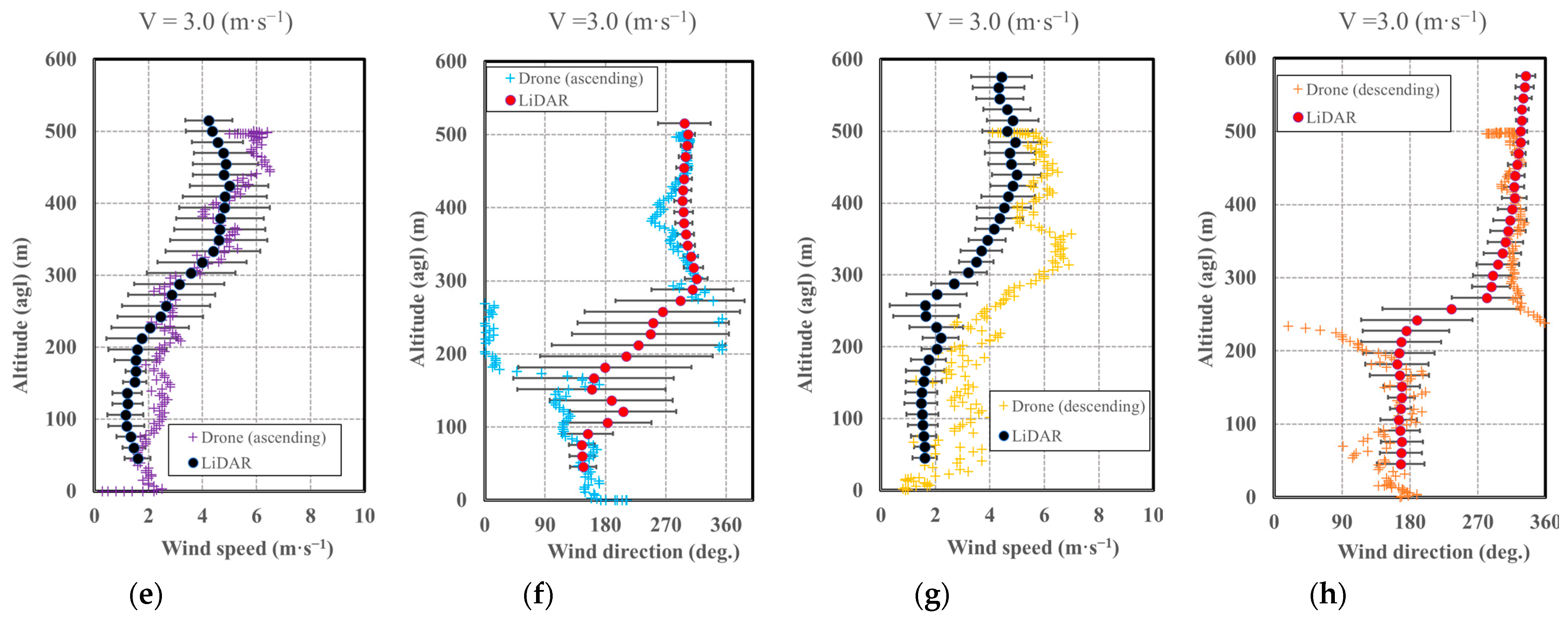
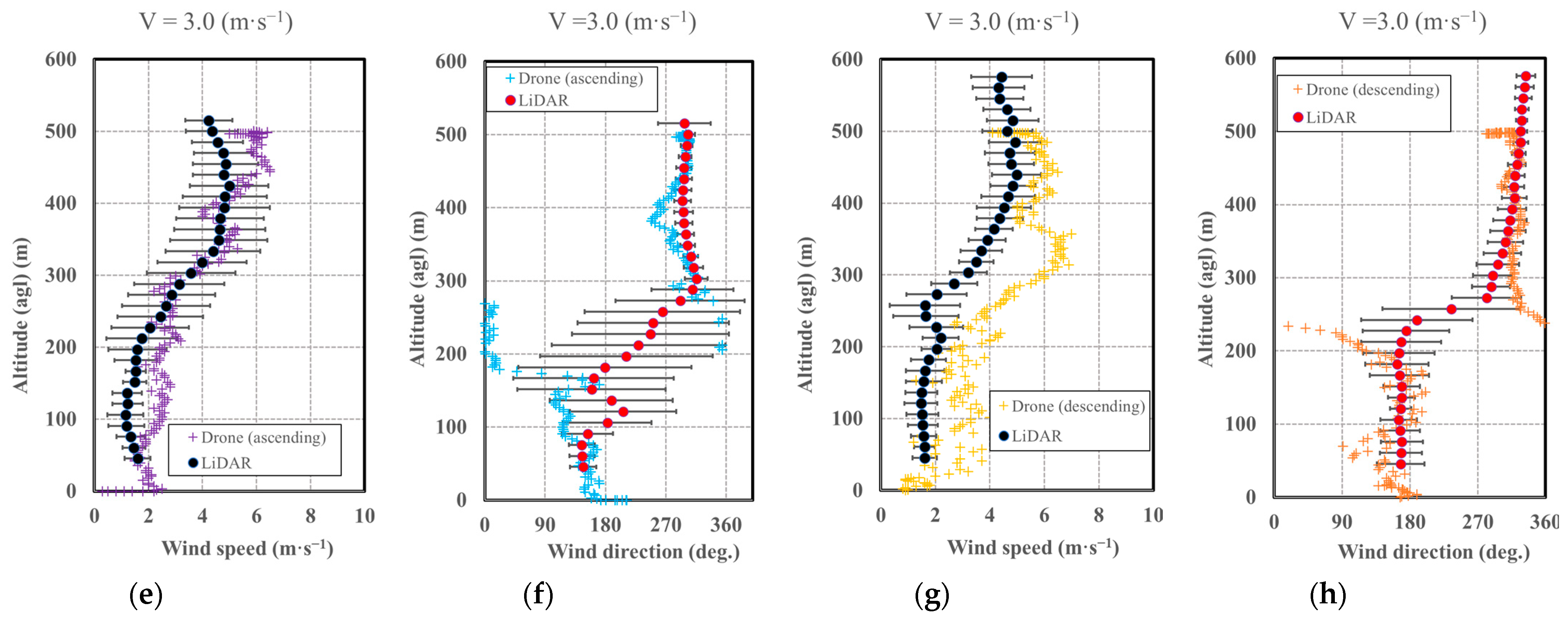
3.2.1. Comparison with LiDAR Observations
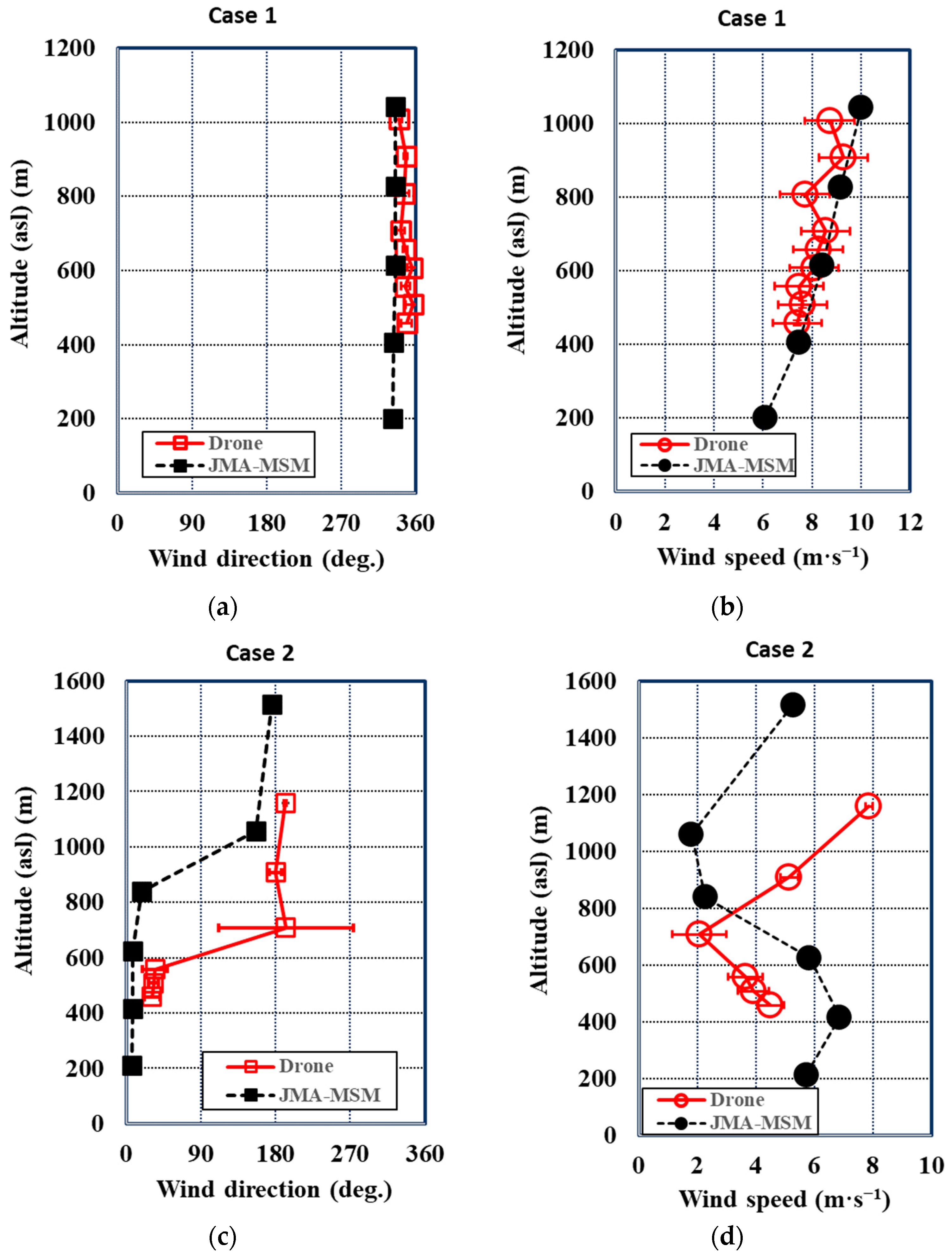
3.2.2. Objective Analysis Comparison
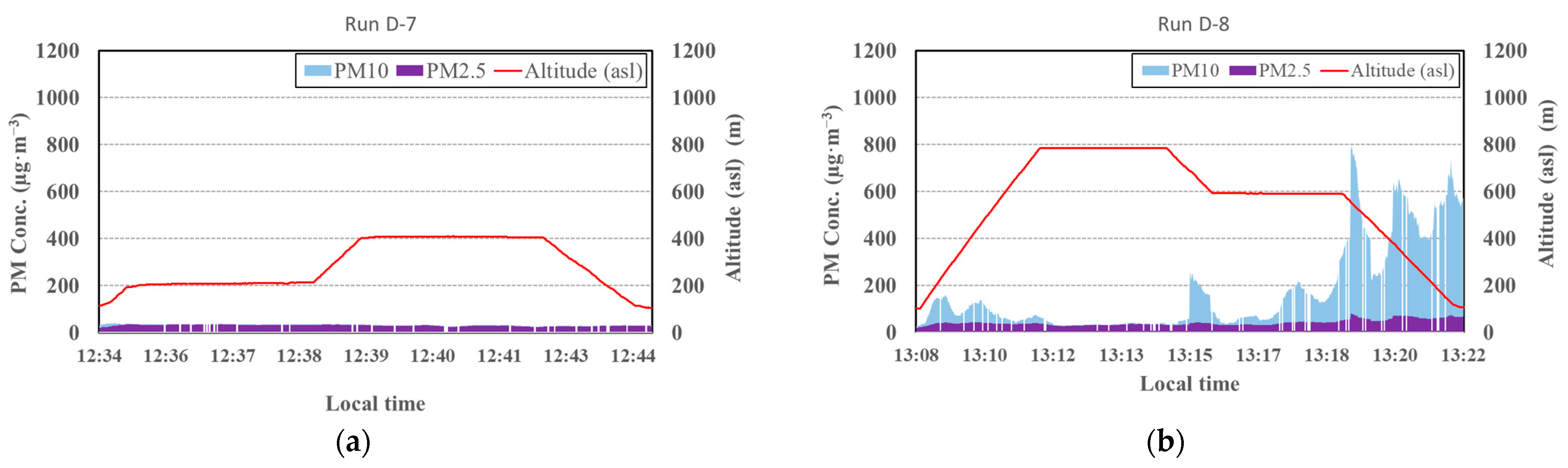
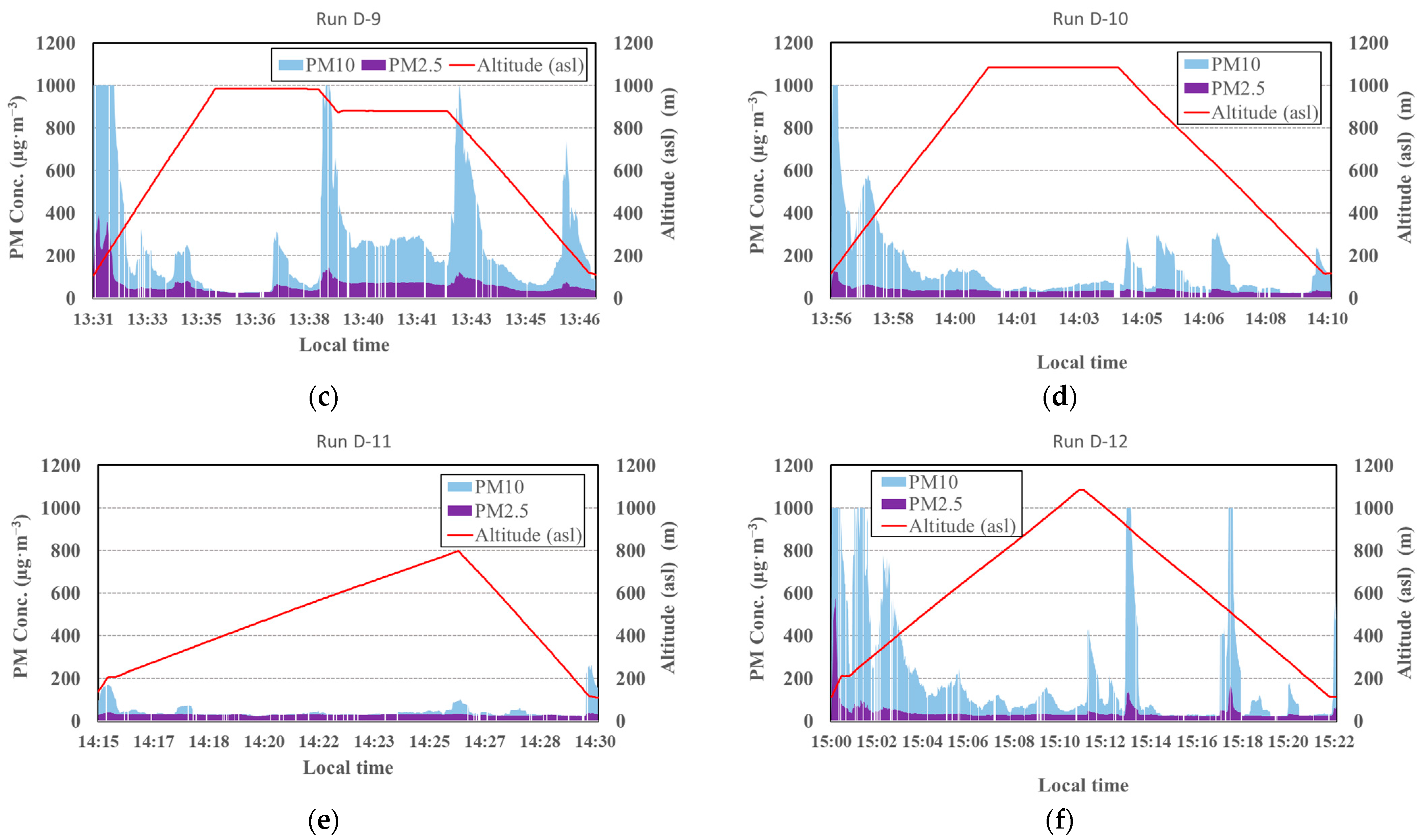
3.2.3. Aerosol Distributions
4. Conclusions and Future Perspectives
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Barbieri, L.; Kral, S.T.; Bailey, S.C.C.; Frazier, A.E.; Jacob, J.D.; Reuder, J.; Brus, D.; Chilson, P.B.; Crick, C.; Detweiler, C.; et al. Intercomparison of small unmanned aircraft system (sUAS) measurements for atmospheric science during the LAPSE-RATE campaign. Sensors 2019, 19, 2179. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shimura, T.; Inoue, M.; Tsujimoto, H.; Sasaki, K.; Iguchi, M. Estimation of wind vector profile using a hexarotor unmanned aerial vehicle and its application to meteorological observations up to 1000 m above the surface. J. Atmos. Ocean. Technol. 2018, 35, 1621–1631. [Google Scholar] [CrossRef]
- Palomaki, R.T.; Rose, N.T.; van den Bossche, M.; Sherman, T.J.; De Wekker, S.F. Wind estimation in the lower atmosphere using multirotor aircraft. J. Atmos. Ocean. Technol. 2017, 34, 1183–1191. [Google Scholar] [CrossRef]
- Neumann, P.P.; Bartholmai, M. Real-time wind estimation on a micro unmanned aerial vehicle using its inertial measurement unit. Sens. Actuators 2015, 235A, 300–310. [Google Scholar] [CrossRef]
- Brosy, C.; Krampf, K.; Zeeman, M.; Wolf, B.; Junkerman, W.; Schäfer, K.; Emels, S.; Kunstmann, H. Simultaneous multicopter-based air sampling and sensing of meteorological variables. Atmos. Meas. Tech. 2017, 10, 2773–2784. [Google Scholar] [CrossRef] [Green Version]
- Aurell, J.; Mitchell, W.; Chirayath, V.; Jonsson, J.; Tabor, D.; Gullett, B. Field determination of multipollutant, open area combustion source emission factors with a hexacopter unmanned aerial vehicle. Atmos. Environ. 2017, 166, 433–440. [Google Scholar] [CrossRef] [PubMed]
- Anand, A.; Wei, P.; Gali, N.K.; Sun, L.; Yang, F.; Westerdahl, D.; Zhang, Q.; Deng, Z.; Wang, Y.; Liu, D.; et al. Protocol development for real-time ship fuel sulfur content determination using drone-based plume sniffing microsensor system. Sci. Total Environ. 2020, 744, 140885. [Google Scholar] [CrossRef]
- Villa, T.F.; Brown, R.A.; Jayaratne, E.R.; Gonzalez, L.F.; Morawska, L.; Ristovski, Z.D. Characterization of the particle emission from a ship operating at sea using an unmanned aerial vehicle. Atmos. Meas. Tech. 2019, 12, 691–702. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, Z.; Park, Y.; Fan, X.; Bai, D.; Zong, P.; Qin, B.; Cai, X.; Ahn, K. Measurements of atmospheric aerosol vertical distribution above North China Plain using hexacopter. Sci. Total Environ. 2019, 665, 1095–1102. [Google Scholar] [CrossRef]
- Liu, F.; Zheng, X.; Jiangsu, H.Q. Comparison of particle concentration vertical profiles between downtown and urban forest park in Nanjing (China). Atmos. Pollut. Res. 2018, 9, 829–839. [Google Scholar] [CrossRef]
- Brady, J.; Stokes, M.; Bonnardel, J.; Bertram, T. Characterization of a quadrotor unmanned aircraft system for aerosol particle-concentration measurements. Environ. Sci. Technol. 2016, 50, 1376–1383. [Google Scholar] [CrossRef]
- Liu, C.; Huang, J.; Wang, Y.; Tao, X.; Hu, C.; Deng, L.; Xu, J.; Xiao, H.; Luo, L.; Xiao, H.; et al. Vertical distribution of PM2.5, and interactions with the atmospheric boundary layer during the development stage of a heavy haze pollution event. Sci. Total Environ. 2020, 704, 135329. [Google Scholar] [CrossRef]
- Kuuluvainen, H.; Poikkimäki, M.; Järvinen, A.; Kuula, J.; Irjala, M.; Dal Maso, M.; Keskinen, J.; Timonen, H.; Niemi, J.; Rönkkö, T. Vertical profiles of lung deposited surface area concentration of particulate matter measured with a drone in a street canyon. Environ. Pollut. 2018, 241, 96–105. [Google Scholar] [CrossRef]
- Villa, T.; Jayaratne, E.; Gonzalez, L.; Morawska, L. Determination of the vertical profile of particle number concentration adjacent to a motorway using an unmanned aerial vehicle. Environ. Pollut. 2017, 230, 134–142. [Google Scholar] [CrossRef] [Green Version]
- Gu, Q.; Michanowicz, D.R.; Jia, C. Developing a modular unmanned aerial vehicle (UAV) platform for air pollution profiling. Sensors 2018, 18, 4363. [Google Scholar] [CrossRef] [Green Version]
- Chilinski, M.T.; Markowicz, K.M.; Markowicz, J. Observation of vertical variability of black carbon concentration in lower troposphere on campaigns in Poland. Atmos. Environ. 2016, 137, 155–170. [Google Scholar] [CrossRef]
- McGonigle, A.; Aiuppa, A.; Giudice, G.; Tamburello, G.; Hodson, A.; Gurrieri, S. Unmanned aerial vehicle measurements of volcanic carbon dioxide fluxes. Geophys. Res. Lett. 2008, 35, L06303. [Google Scholar] [CrossRef] [Green Version]
- Mori, T.; Hashimoto, T.; Terada, A.; Yoshimoto, M.; Kazahaya, R.; Shinohara, H.; Tanaka, R. Volcanic plume measurements using a UAV for the 2014 Mt. Ontake eruption. Earth Planets Space 2016, 68, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Yi, E.E.P.N.; Nway, N.C.; Aung, W.Y.; Thant, Z.; Wai, T.H.; Hlaing, K.K.; Maung, C.; Yagishita, M.; Ishigaki, Y.; Win-Shwe, T.-T.; et al. Preliminary monitoring of concentration of particulate matter (PM2.5) in seven townships in Yangon City, Myanmar. Environ. Health Prev. Med. 2018, 23, 1–8. [Google Scholar] [CrossRef]
- Hwang, J.Y.; Jung, M.K.; Kwon, O.J. Numerical study of aerodynamic performance of a multirotor unmanned-aerial-vehicle configuration. J. Aircr. 2015, 52, 839–846. [Google Scholar] [CrossRef]
- Roldán, J.J.; Joossen, G.; Sanz, D.; del Cerro, J.; Barrientos, A. Mini-UAV based sensory system for measuring environmental variables in greenhouse. Sensors 2015, 15, 3334–3350. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Villa, T.F.; Salimi, F.; Morton, K.; Morawska, L.; Gonzalez, F. Development and validation of a UAV-based system for air pollution measurements. Sensors 2016, 16, 2202. [Google Scholar] [CrossRef] [Green Version]
- Alvarado, M.; Gonzalez, F.; Erskine, P.; Cliff, D.; Heuff, D. A methodology to monitor airborne PM10 dust particles using a small unmanned aerial vehicle. Sensors 2017, 17, 343. [Google Scholar] [CrossRef] [PubMed]
- Fujita, T.; Yamada, Y.; Ishida, J.; Kumagai, Y.; Aranami, K.; Ohmori, S.; Nagasawa, R.; Kumagai, H. The operational JMA nonhydrostatic mesoscale model. Mon. Weather Rev. 2006, 134, 1266–1296. [Google Scholar]
- Poulidis, A.P.; Takemi, T.; Shimizu, A.; Iguchi, M.; Jenkins, S.F. Statistical analysis of dispersal and deposition patterns of volcanic emissions from Mt. Sakurajima, Japan. Atmos. Environ. 2018, 179, 305–320. [Google Scholar] [CrossRef]
- El’ıasson, J.; Yoshitani, J.; Mik, D.; Webe, K.; Böolke, C.; Scharifi, E. Measurements of particle distribution and ash fluxes in the plume of Sakurajima volcano with optical particle counter. J. Disaster Res. 2016, 11, 85–95. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Run No. | Flight Date Time a | Site | Flight Pattern | Accuracy Analysis |
|---|---|---|---|---|
| A-1 | 22 February 2019 14:29:12–14:46:50 | Indoor drone field | Hovering (2.0 m, 3.5 m) | Preliminary experiments |
| A-2 | 22 February 2019 14:55:00–15:11:30 | Indoor drone field | Hovering (2.0 m, 3.5 m) | |
| A-3 | 22 February 2019 15:33:40–15:51:30 | Indoor drone field | Hovering (2.0 m, 3.5 m) | |
| B-1 | 30 October 2019 14:00:20–14:07:32 | Kurokami | Moving (V = 3.0 m·s−1) | Comparison with Doppler LiDAR |
| B-2 | 30 October 2019 14:10:10–14:20:04 | Kurokami | Moving (V = 2.0 m·s−1) | |
| B-3 | 30 October 2019 14:24:15–14:41:45 | Kurokami | Moving (V = 1.0 m·s−1) | |
| B-4 | 30 October 2019 14:44:00–14:55:00 | Kurokami | Hovering (500 m, 400 m, 300 m, 200 m, 100 m) | |
| C-1 | 30 January 2018 15:25:00–15:39:00 | Haruta | Hovering (150 m, 100 m, 50 m) | Comparison with objective analysis value (JMA-MSM) |
| C-2 | 30 January 2018 15:42:00–15:52:00 | Haruta | Hovering (300 m, 200 m) | |
| C-3 | 30 January 2018 15:58:00–16:08:00 | Haruta | Hovering (400 m, 250 m) | |
| C-4 | 30 January 2018 16:10:00–16:24:00 | Haruta | Hovering (600 m, 500 m) | |
| C-5 | 31 January 2018 11:08:00–11:20:00 | Haruta | Hovering (150 m, 100 m, 50 m) | |
| C-6 | 31 January 2018 11:24:00–11:36:00 | Haruta | Hovering (500 m, 300 m) | |
| C-7 | 31 January 2018 11:39:00–11:50:00 | Haruta | Hovering (750 m) | |
| D-1 | 26 February 2020 13:49:45–14:02:30 | Nabeyama | Hovering (1000 m) | Aerosols and volcanic gases |
| D-2 | 26 February 2020 14:06:35–14:21:59 | Nabeyama | Hovering (900 m, 800 m) | |
| D-3 | 26 February 2020 14:25:38–14:39:05 | Nabeyama | Hovering (700 m, 600 m) | |
| D-4 | 26 February 2020 14:42:20–14:57:35 | Nabeyama | Hovering (500 m, 400 m, 300 m) | |
| D-5 | 26 February 2020 15:03:15–15:18:40 | Nabeyama | Hovering (900 m, 800 m) | |
| D-6 | 26 February 2020 15:20:35–15:33:05 | Nabeyama | Hovering (600 m, 500 m) | |
| D-7 | 27 February 2020 12:34:50–12:44:30 | Arimura | Hovering (100 m, 300 m) | |
| D-8 | 27 February 2020 13:08:40–13:22:00 | Arimura | Hovering (700 m, 500 m) | |
| D-9 | 27 February 2020 13:31:40–12:47:10 | Arimura | Hovering (900 m, 800 m) | |
| D-10 | 27 February 2020 13:56:50–14:10:15 | Arimura | Hovering (1000 m) | |
| D-11 | 27 February 2020 14:15:30–14:30:35 | Arimura | Moving (V = 1.0 m·s−1) | |
| D-12 | 27 February 2020 15:00:45–15:22:50 | Arimura | Moving (V = 1.5 m·s−1) |
| Event No. | Date Time a | Type b | Plume Direction | Plume Height (m) | Related Run c |
|---|---|---|---|---|---|
| E1 | 26 February 2020 12:51 | Explosion | SE | 2600 | |
| E2 | 26 February 2020 13:04 | Eruption | SE | 2000 | |
| E3 | 26 February 2020 13:13 | Eruption | SE | 1800 | |
| E4 | 26 February 2020 13:23 | Eruption | SE | 1500 | Run D-1 |
| E5 | 27 February 2020 13:01 | Explosion | SE | 1800 | Run D-8 |
| E6 | 27 February 2020 14:23 | Explosion | S | 1800 | Run D-11 |
| E7 | 27 February 2020 23:15 | Explosion | W | 1300 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sasaki, K.; Inoue, M.; Shimura, T.; Iguchi, M. In Situ, Rotor-Based Drone Measurement of Wind Vector and Aerosol Concentration in Volcanic Areas. Atmosphere 2021, 12, 376. https://doi.org/10.3390/atmos12030376
Sasaki K, Inoue M, Shimura T, Iguchi M. In Situ, Rotor-Based Drone Measurement of Wind Vector and Aerosol Concentration in Volcanic Areas. Atmosphere. 2021; 12(3):376. https://doi.org/10.3390/atmos12030376
Chicago/Turabian StyleSasaki, Kansuke, Minoru Inoue, Tomoya Shimura, and Masato Iguchi. 2021. "In Situ, Rotor-Based Drone Measurement of Wind Vector and Aerosol Concentration in Volcanic Areas" Atmosphere 12, no. 3: 376. https://doi.org/10.3390/atmos12030376