
A Numerical Validation of 3D Experimental Dam-Break Wave Interaction with a Sharp Obstacle Using DualSPHysics

 ,
,  , , ,
, , ,  and
and 
Abstract
1. Introduction
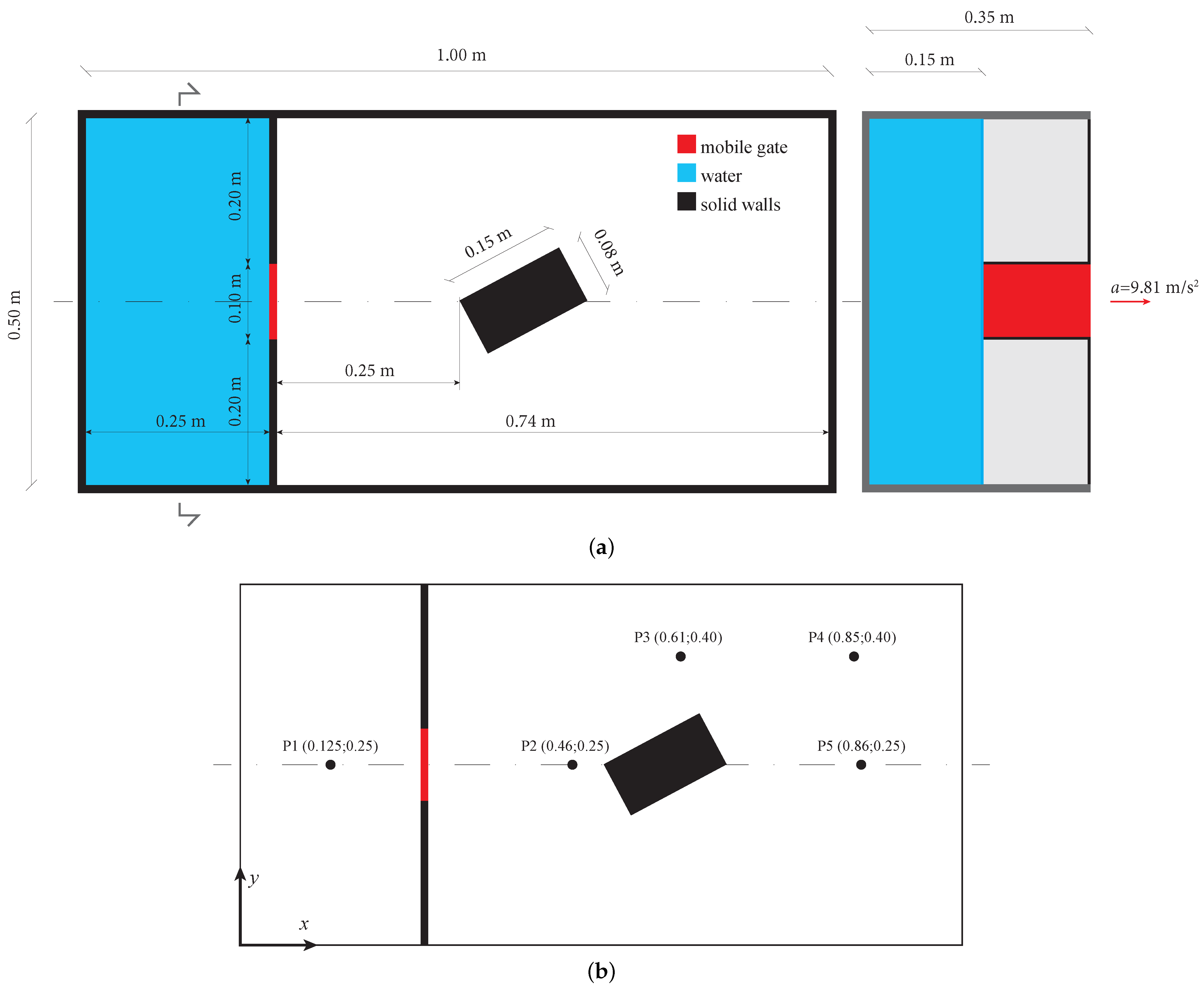
2. Experimental Set-Up
3. SPH Formulation
- The problem domain is discretized with particles without a fixed connectivity, so treatment of large deformation is relatively easier.
- Discretization of complex geometry is simpler as only an initial discretization is required.
- It is easy to obtain the features of the entire physical system through tracing the motion of the particles, and, therefore, identifying free surfaces, moving interfaces, and deformable boundaries is no longer a tough task.
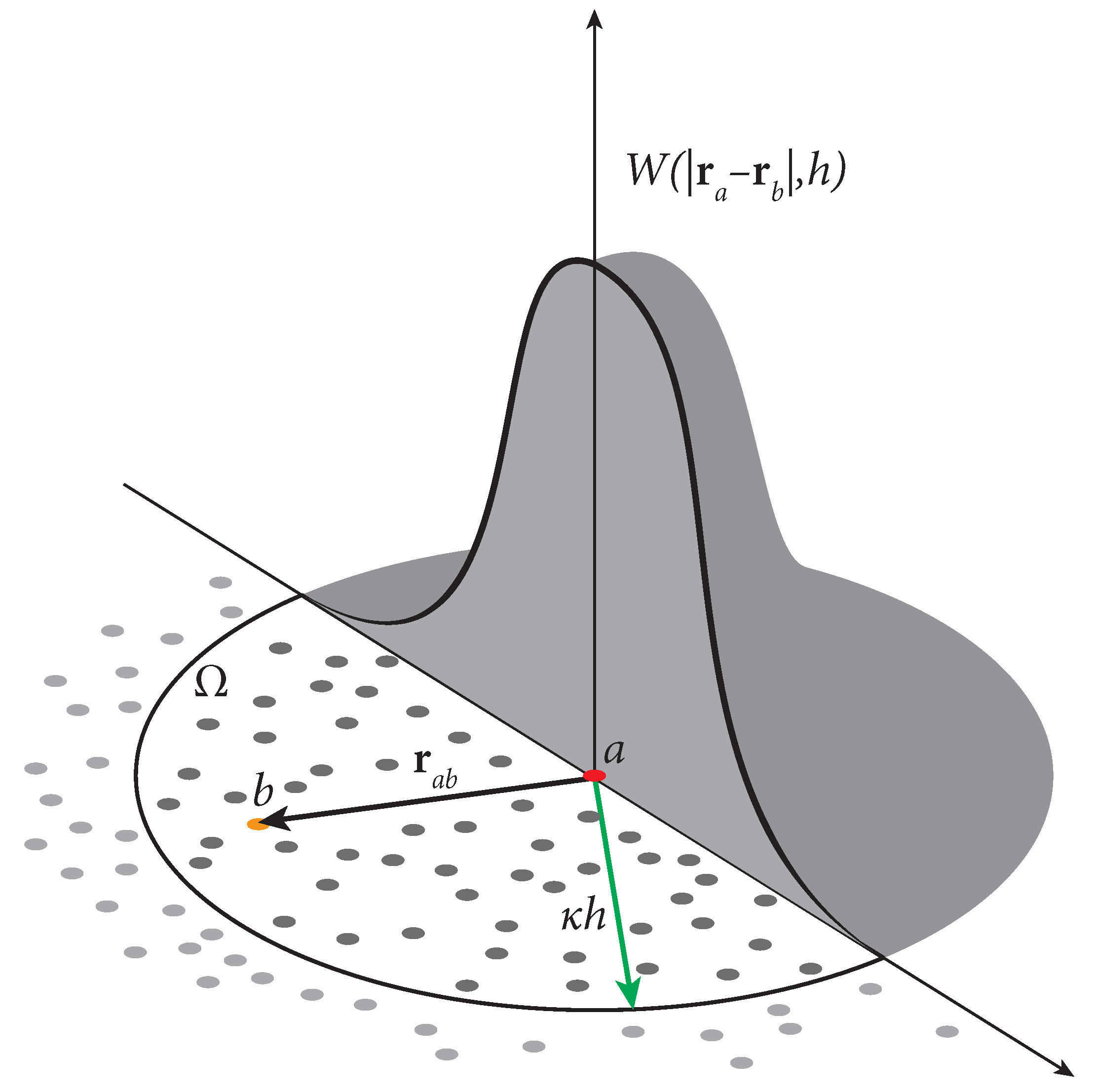
3.1. Principles of the SPH Method
3.2. Governing Equations
- conservation of mass;
- conservation of momentum.
3.3. Boundary Treatment
4. Numerical Set-Up
4.1. Reference Parameters
- Resolution: It is the initial interparticle distance, or , defined as number of particle per separation wall thickness s
- Domain multiplicative coefficient: It is the multiplier of the smoothing length h, which defines the interaction domain for each particle; the smoothing length depends on and according to
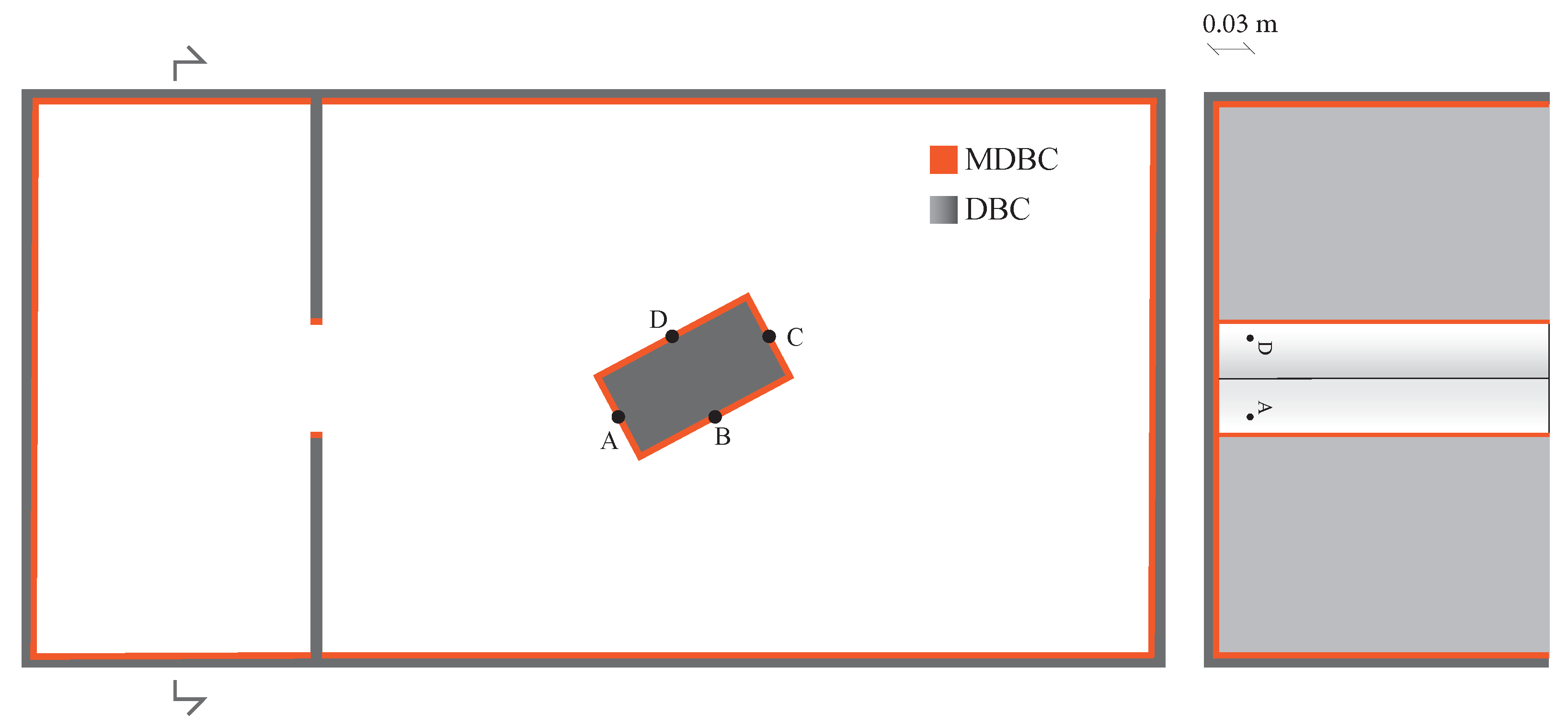
- The mDBC are applied on every surface in the domain (indicated in the charts with ‘mDBC’).
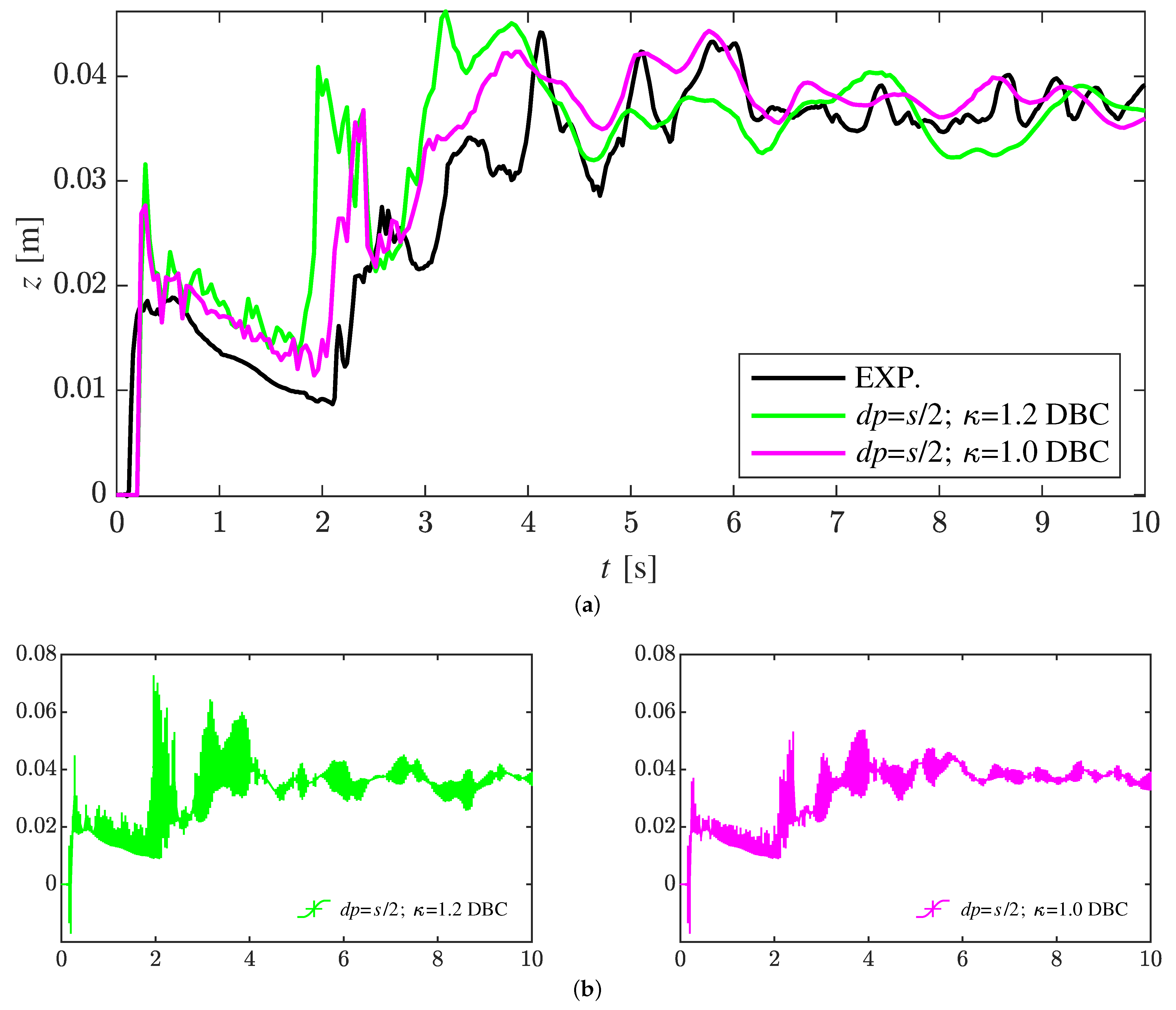
- The tank walls (wet surfaces at ) are treated with DBC, while the dry walls with mDBC, as visible in Figure 4 (indicated in the charts with ‘DBC’).
4.2. Data Analysis
5. Results
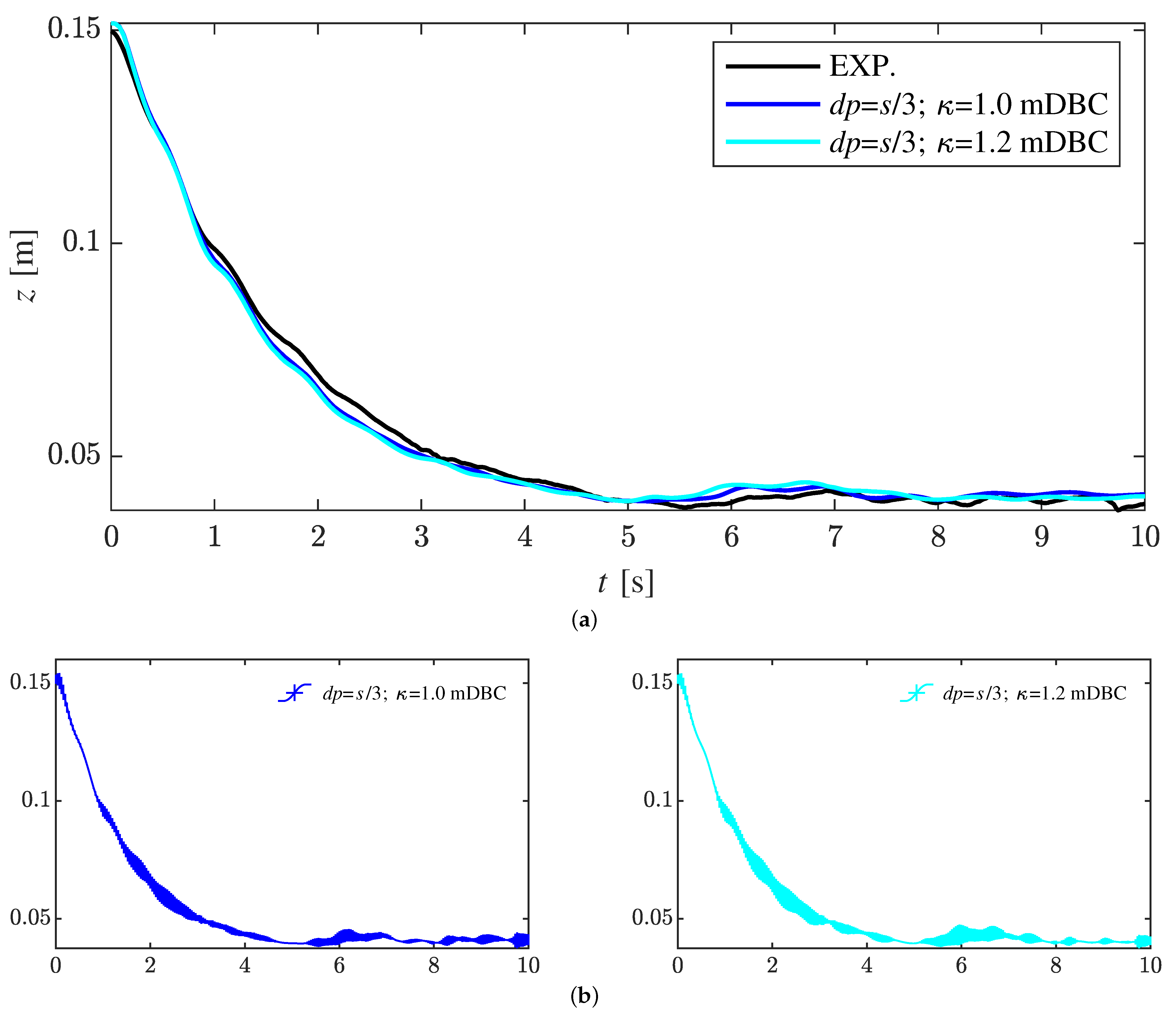
5.1. Tank Emptying Analysis
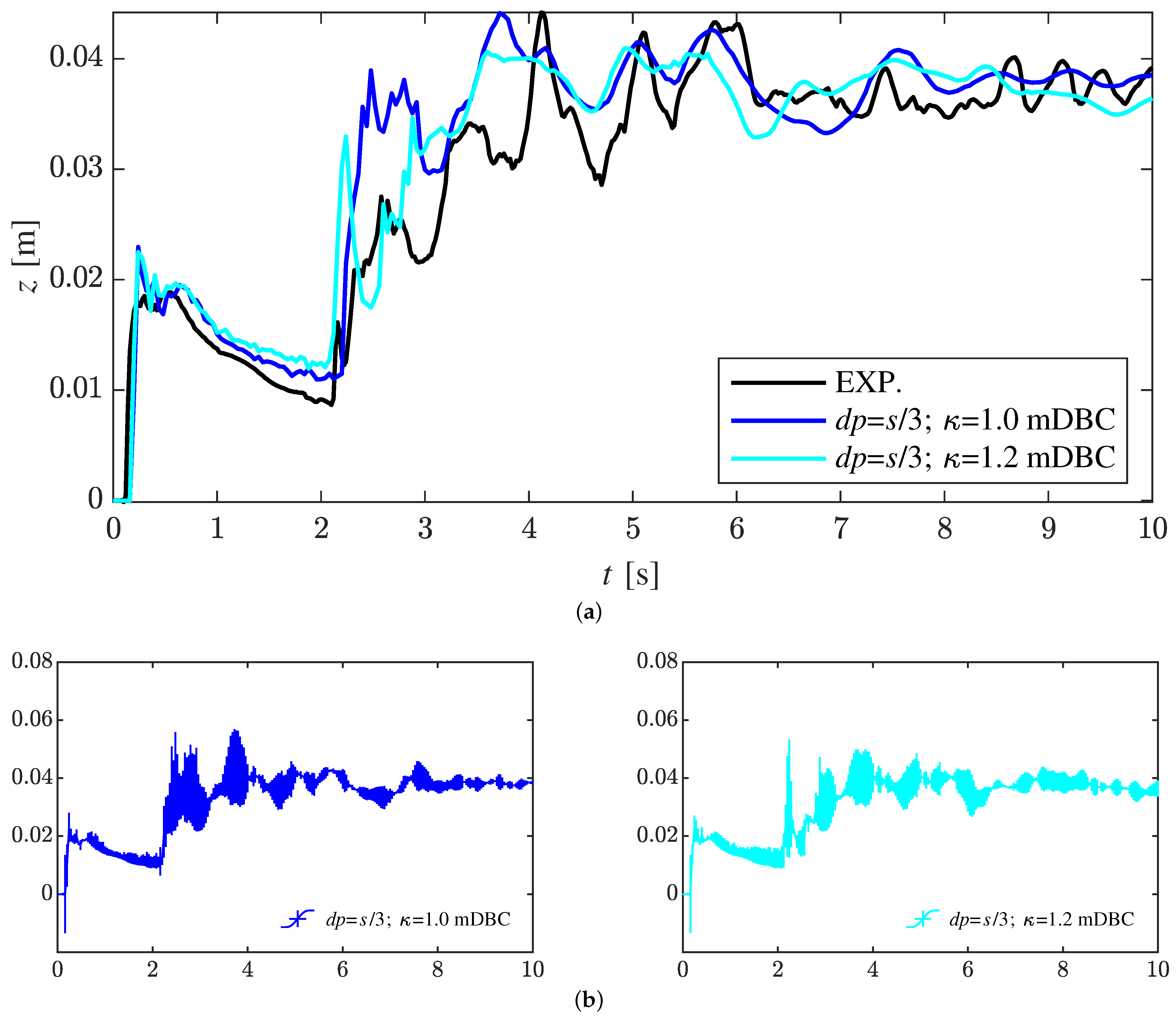
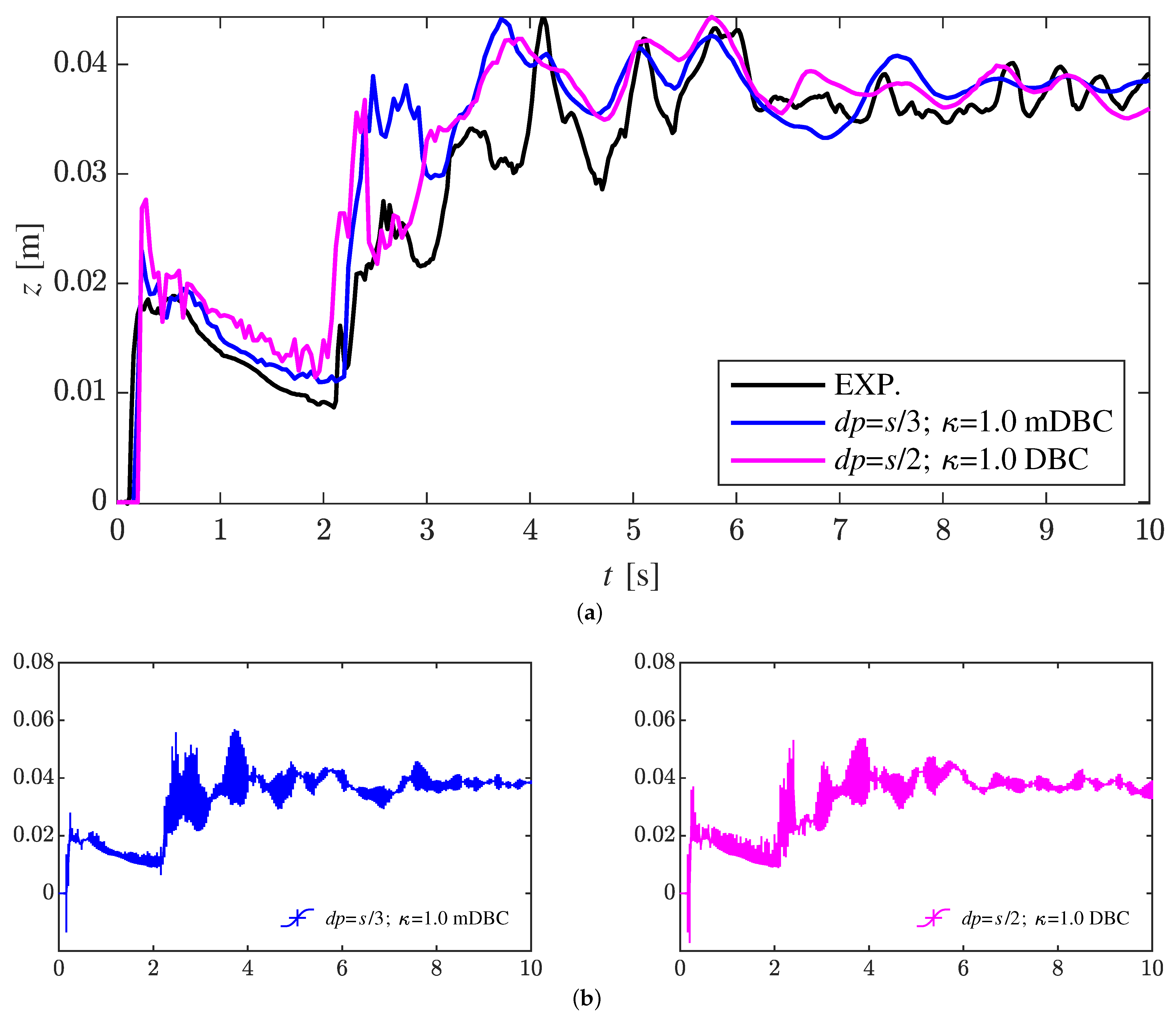
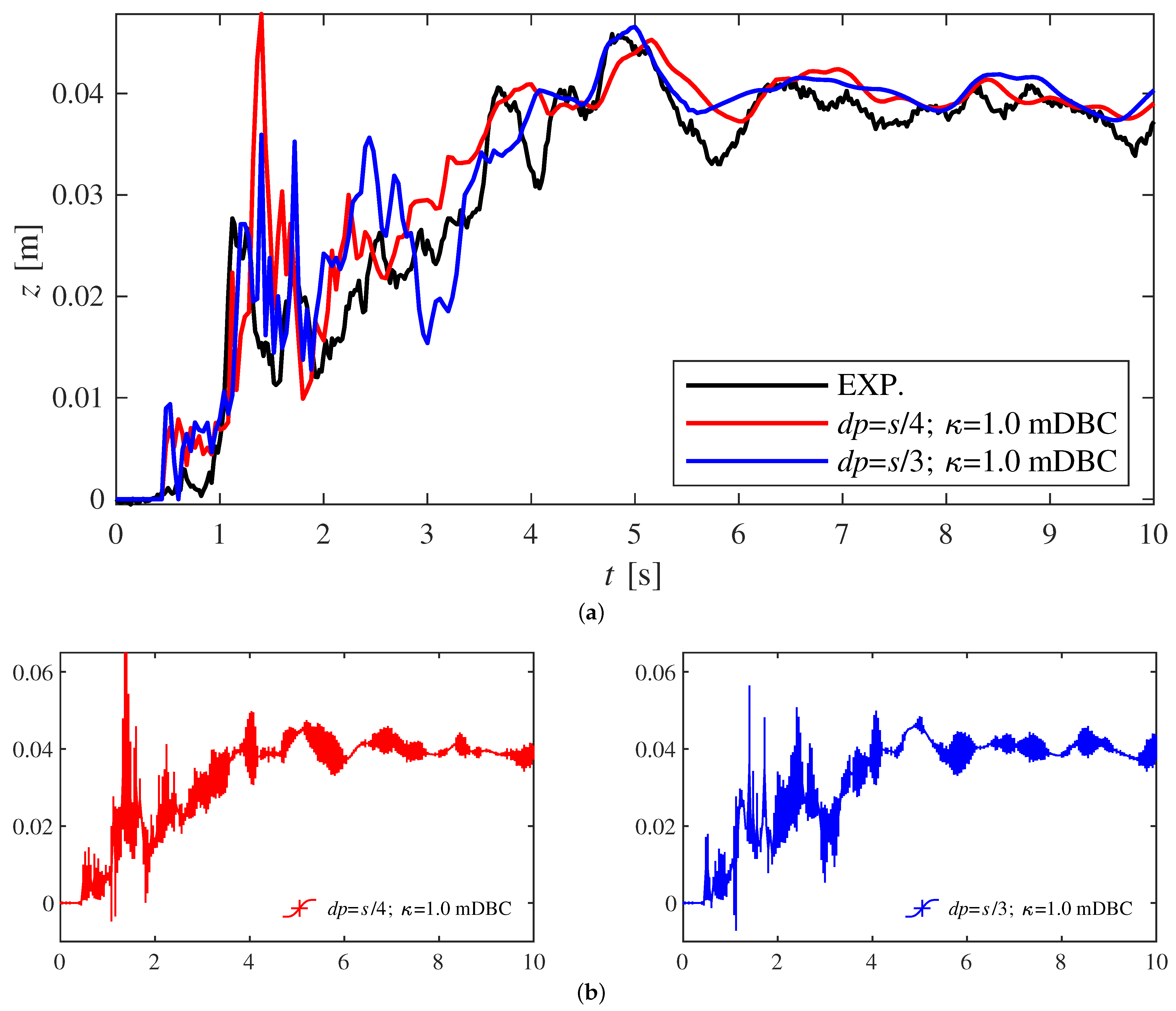
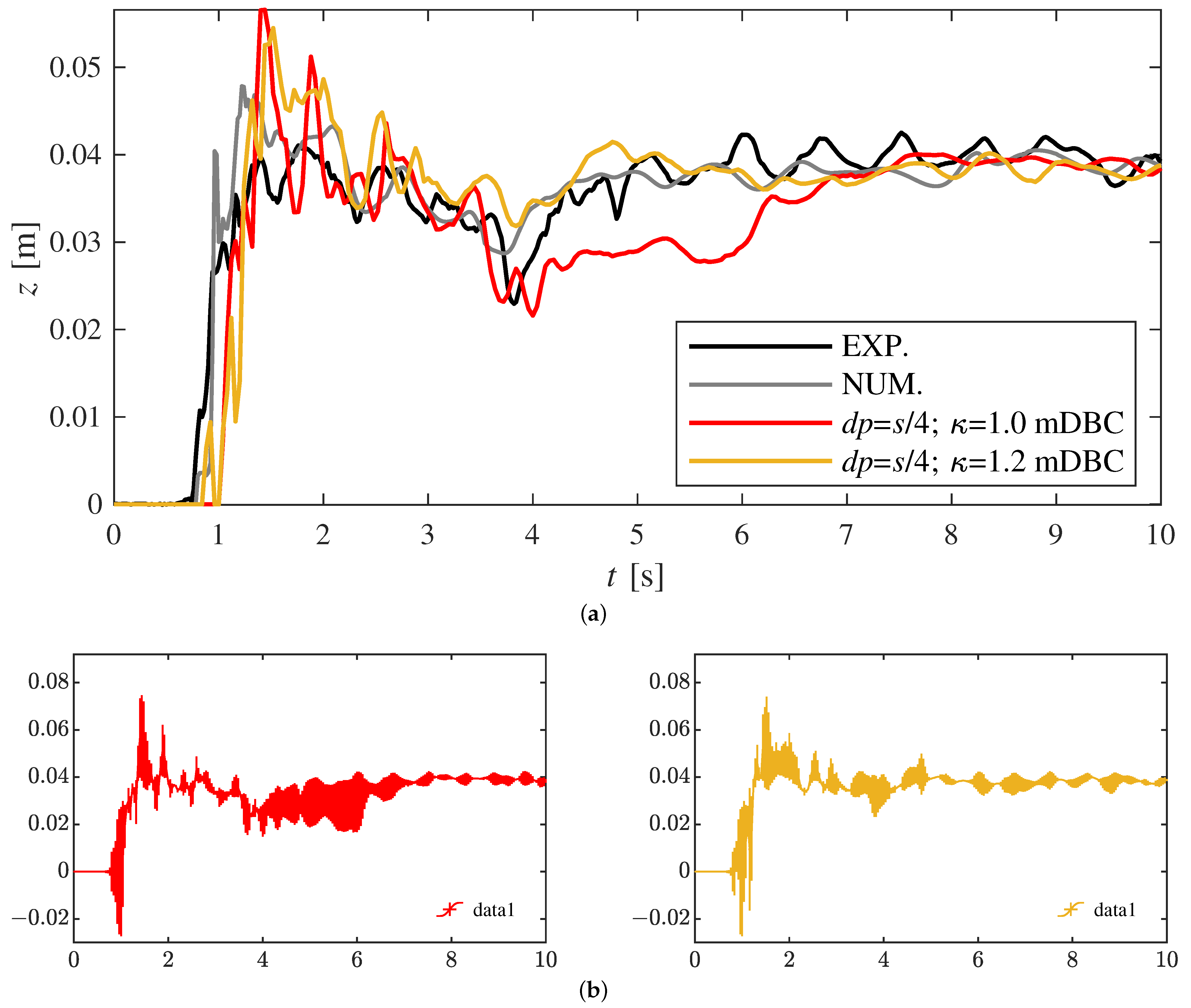
5.2. Fluid Propagation Dynamics
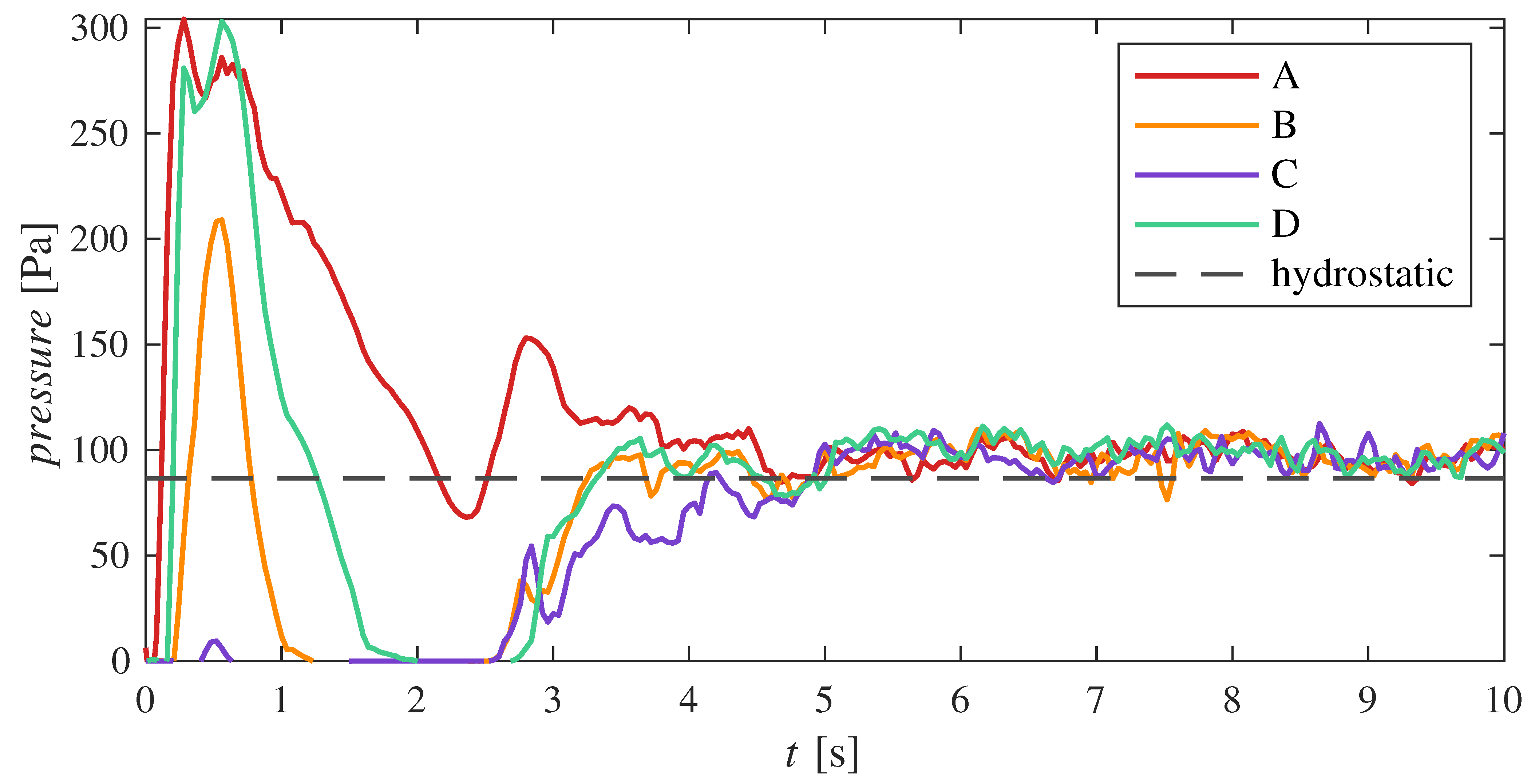
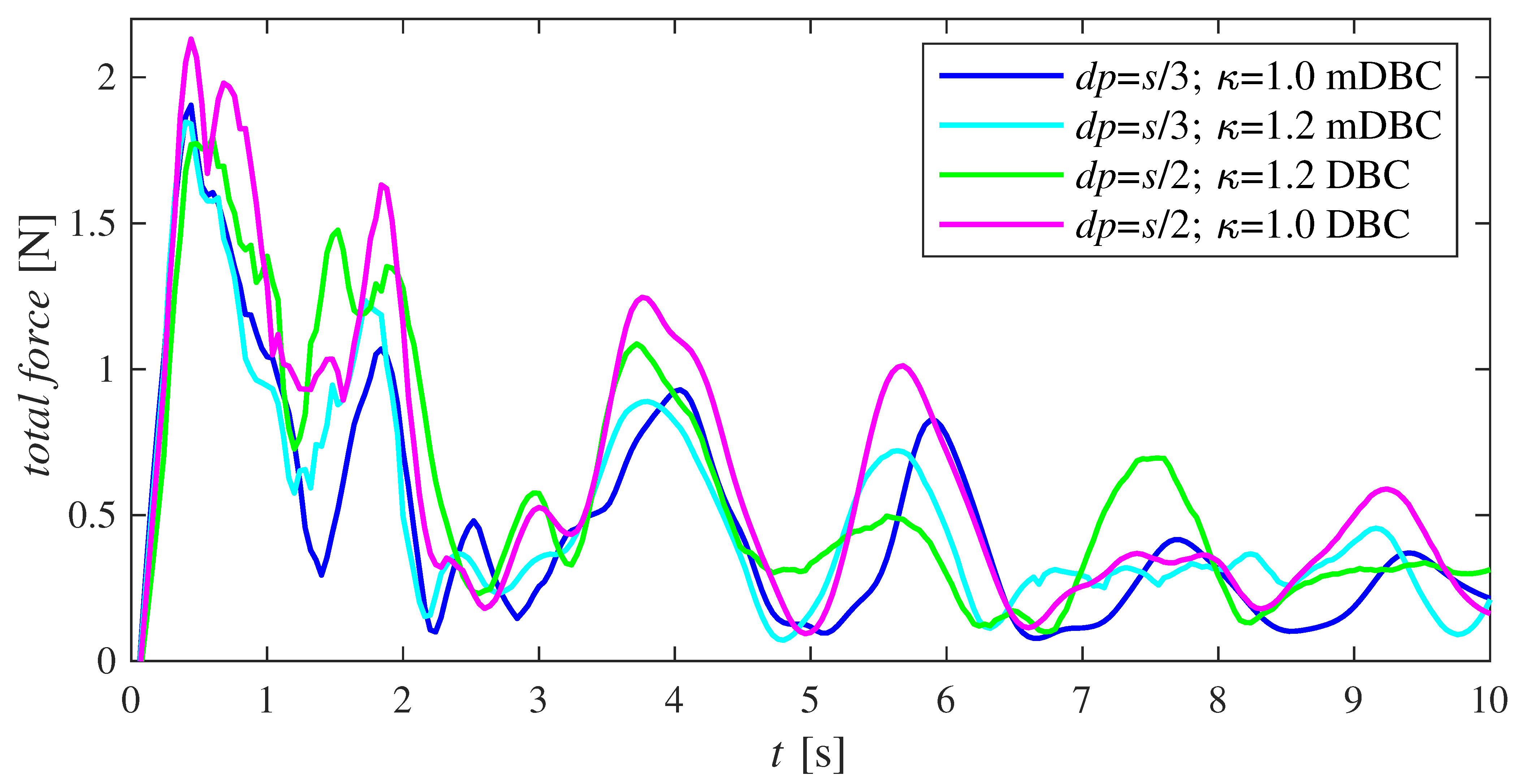
5.3. Impacts on the Downstream Structure
5.4. Overall Analysis
6. Conclusions
- The tank emptying is very well reproduced with all the attempted values for the parameters (Figure 5).
- The FSI is well computed, and the mDBC has demonstrated its suitability for violent impacts of fluid masses with solid dry objects.
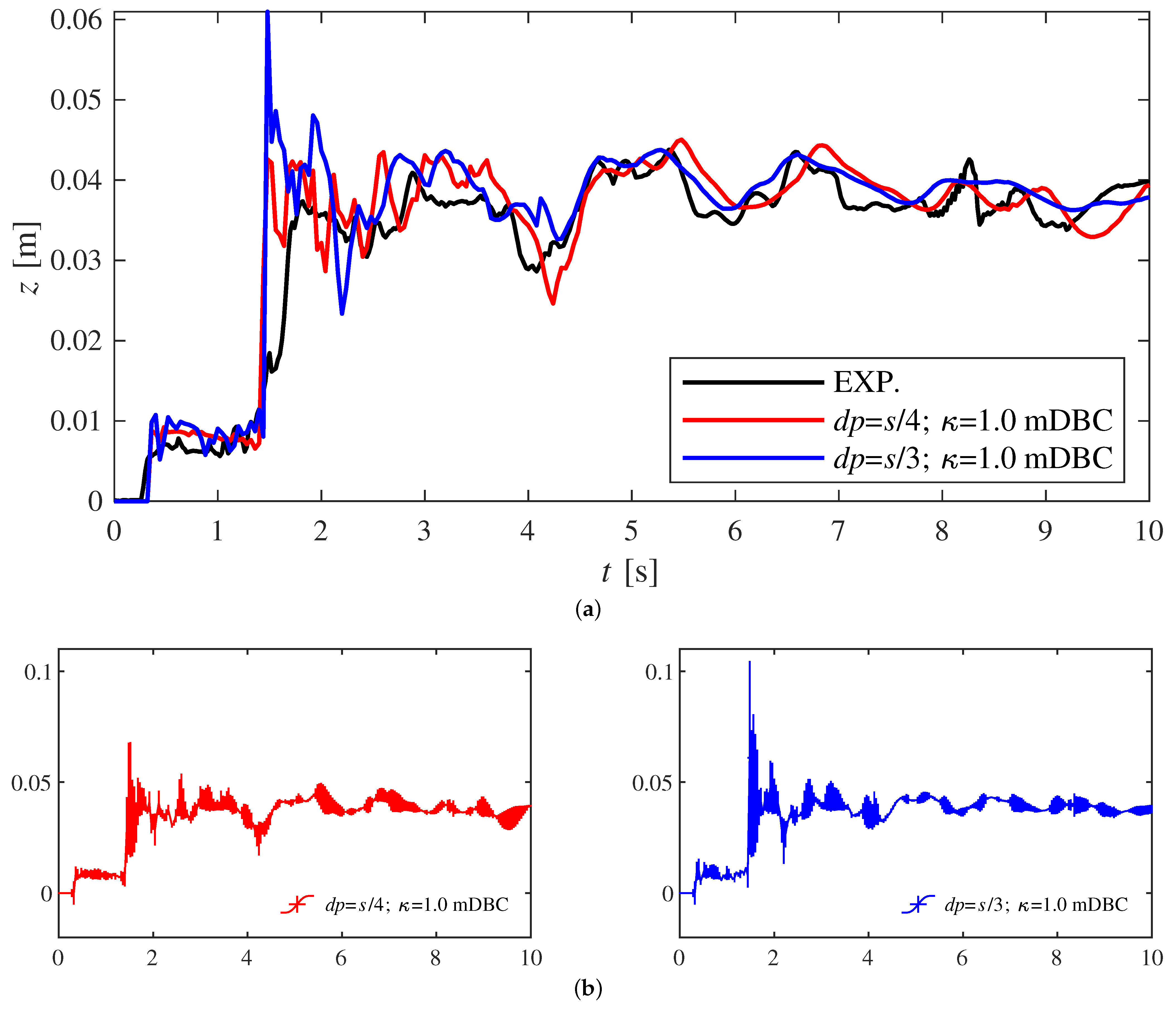
- The non-negligible multi-phase dynamics observable at P5 is represented with good agreement, especially considering the increasing importance of the air cavities when the dynamics complexity raises, and mainly depends on the resolution and the kernel support domain size (Figure 13).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2D | Two-Dimensional |
| 3D | Three-Dimensional |
| SWEs | Shallow Water Equations |
| FSI | Fluid–Solid Interaction |
| SPH | Smoothed Particle Hydrodynamics |
| MPMs | Meshfree Particle Methods |
| BC | Boundary Conditions |
| DBC | Dynamic Boundary Conditions |
| mDBC | modified Dynamic Boundary Conditions |
| CFD | Computational Fluid Dynamics |
References
- Norin, S.; Belikov, V.V.; Aleksyuk, A. Simulating flood waves in residential areas. Power Technol. Eng. 2017, 51, 52–57. [Google Scholar] [CrossRef]
- Evangelista, S.; Altinakar, M.S.; Di Cristo, C.; Leopardi, A. Simulation of dam-break waves on movable beds using a multi-stage centered scheme. Int. J. Sediment Res. 2013, 28, 269–284. [Google Scholar] [CrossRef]
- Kocaman, S.; Evangelista, S.; Viccione, G.; Güzel, H. Experimental and Numerical Analysis of 3D Dam-Break Waves in an Enclosed Domain with a Single Oriented Obstacle. Environ. Sci. Proc. 2020, 2, 35. [Google Scholar] [CrossRef]
- Evangelista, S. Experiments and Numerical Simulations of Dike Erosion due to a Wave Impact. Water 2015, 7, 5831–5848. [Google Scholar] [CrossRef]
- Pugliese Carratelli, E.; Viccione, G.; Bovolin, V. Free surface flow impact on a vertical wall: A numerical assessment. Theor. Comput. Fluid Dyn. 2016, 30. [Google Scholar] [CrossRef]
- Hattori, M.; Arami, A.; Yui, T. Wave impact pressure on vertical walls under breaking waves of various types. Coast. Eng. 1994, 22, 79–114. [Google Scholar] [CrossRef]
- Peregrine, D.H. Water-Wave Impact On Walls. Annu. Rev. Fluid Mech. 2003, 35, 23–43. [Google Scholar] [CrossRef]
- Di Cristo, C.; Evangelista, S.; Greco, M.; Iervolino, M.; Leopardi, A.; Vacca, A. Dam-break waves over an erodible embankment: Experiments and simulations. J. Hydraul. Res. 2018, 56, 196–210. [Google Scholar] [CrossRef]
- Viccione, G.; Ferlisi, S.; Marra, E. A numerical investigation of the interaction between debris flows and defense barriers. In Proceedings of the 8th International Conference on Environmental and Geological Science and Engineering (EG’15), Salerno, Italy, 27–29 June 2015; pp. 332–342. [Google Scholar]
- Kocaman, S.; Güzel, H.; Evangelista, S.; Ozmen-Cagatay, H.; Viccione, G. Experimental and Numerical Analysis of a Dam-Break Flow through Different Contraction Geometries of the Channel. Water 2020, 12, 1124. [Google Scholar] [CrossRef]
- Shigeeda, M.; Akiyama, J.; Ura, M.; Arita, Y. 2-D Numerical model based ON unstructured finite volume method for flood flows. Proc. Hydraul. Eng. 2001, 45, 895–900. [Google Scholar] [CrossRef][Green Version]
- Aureli, F.; Maranzoni, A.; Mignosa, P.; Ziveri, C. A weighted surface-depth gradient method for the numerical integration of the 2D shallow water equations with topography. Adv. Water Resour. 2008, 31, 962–974. [Google Scholar] [CrossRef]
- Kocaman, S.; Evangelista, S.; Guzel, H.; Dal, K.; Yilmaz, A.; Viccione, G. Experimental and Numerical Investigation of 3D Dam-Break Wave Propagation in an Enclosed Domain with Dry and Wet Bottom. Appl. Sci. 2021, 11, 5638. [Google Scholar] [CrossRef]
- Soares-Fraz ao, S.; Zech, Y. Dam-break flow through an idealised city. J. Hydraul. Res. 2008, 46, 648–658. [Google Scholar] [CrossRef]
- Abderrezzak, K.E.K.; Paquier, A.; Mignot, E. Modelling flash flood propagation in urban areas using a two-dimensional numerical model. Nat. Hazards 2008, 50, 433–460. [Google Scholar] [CrossRef]
- Aureli, F.; Dazzi, S.; Maranzoni, A.; Mignosa, P.; Vacondio, R. Experimental and numerical evaluation of the force due to the impact of a dam-break wave on a structure. Adv. Water Resour. 2015, 76, 29–42. [Google Scholar] [CrossRef]
- Violeau, D.; Rogers, B. Smoothed particle hydrodynamics (SPH) for free-surface flows: Past, present and future. J. Hydraul. Res. 2016, 54, 1–26. [Google Scholar] [CrossRef]
- Amicarelli, A.; Manenti, S.; Albano, R.; Agate, G.; Paggi, M.; Longoni, L.; Mirauda, D.; Ziane, L.; Viccione, G.; Todeschini, S.; et al. SPHERA v.9.0.0: A Computational Fluid Dynamics research code, based on the Smoothed Particle Hydrodynamics mesh-less method. Comput. Phys. Commun. 2020, 250, 107157. [Google Scholar] [CrossRef]
- Kocaman, S.; Dal, K. A New Experimental Study and SPH Comparison for the Sequential Dam-Break Problem. J. Mar. Sci. Eng. 2020, 8, 905. [Google Scholar] [CrossRef]
- Amicarelli, A.; Albano, R.; Mirauda, D.; Agate, G.; Sole, A.; Guandalini, R. A Smoothed Particle Hydrodynamics model for 3D solid body transport in free surface flows. Comput. Fluids 2015, 116, 205–228. [Google Scholar] [CrossRef]
- Ansari, A.; Khavasi, E.; Ghazanfarian, J. Experimental and SPH studies of reciprocal wet-bed dam-break flow over obstacles. Int. J. Mod. Phys. C 2021, 2150098. [Google Scholar] [CrossRef]
- Crespo, A.J.; Gómez-Gesteira, M.; Dalrymple, R.A. Modeling Dam Break Behavior over a Wet Bed by a SPH Technique. J. Waterw. Port Coast. Ocean Eng. 2008, 134, 313–320. [Google Scholar] [CrossRef]
- Viccione, G.; Bovolin, V.; Carratelli, E.P. Simulating fluid-structure interaction with SPH. AIP Conf. 2012. [Google Scholar] [CrossRef]
- Viccione, G.; Bovolin, V. Simulating triggering and evolution of debris-flows with Smoothed Particle Hydrodynamics (SPH). In Proceedings of the 5th International Conference on Debris-Flow Hazards Mitigation: Mechanics, Prediction and Assessment, Padua, Italy, 14–17 June 2011. [Google Scholar] [CrossRef]
- Domínguez, J.; Fourtakas, G.; Altomare, C.; Canelas, R.; Tafuni, A.; García Feal, O.; Martínez-Estévez, I.; Mokos, A.; Vacondio, R.; Crespo, A.; et al. DualSPHysics: From fluid dynamics to multiphysics problems. Comput. Part. Mech. 2021. [Google Scholar] [CrossRef]
- Vacondio, R.; Rogers, B.; Stansby, P.; Mignosa, P.; Feldman, J. Variable resolution for SPH: A dynamic particle coalescing and splitting scheme. Comput. Methods Appl. Mech. Eng. 2013, 256, 132–148. [Google Scholar] [CrossRef]
- Barreiro, A.; Crespo, A.; Domínguez, J.; Gómez-Gesteira, M. Smoothed Particle Hydrodynamics for coastal engineering problems. Comput. Struct. 2013, 120, 96–106. [Google Scholar] [CrossRef]
- Altomare, C.; Domínguez, J.; Crespo, A.; González-Cao, J.; Suzuki, T.; Gómez-Gesteira, M.; Troch, P. Long-crested wave generation and absorption for SPH-based DualSPHysics model. Coast. Eng. 2017, 127, 37–54. [Google Scholar] [CrossRef]
- Mogan, S.C.; Chen, D.; Hartwig, J.; Sahin, I.; Tafuni, A. Hydrodynamic analysis and optimization of the Titan submarine via the SPH and Finite-Volume methods. Comput. Fluids 2018, 174, 271–282. [Google Scholar] [CrossRef]
- Domínguez, J.; Crespo, A.; Hall, M.; Altomare, C.; Wu, M.; Stratigaki, V.; Troch, P.; Cappietti, L.; Gómez-Gesteira, M. SPH simulation of floating structures with moorings. Coast. Eng. 2019, 153, 103560. [Google Scholar] [CrossRef]
- Kisacik, D.; Stratigaki, V.; Wu, M.; Cappietti, L.; Simonetti, I.; Troch, P.; Crespo, A.; Altomare, C.; Domínguez, J.; Hall, M.; et al. Efficiency and Survivability of a Floating Oscillating Water Column Wave Energy Converter Moored to the Seabed: An Overview of the EsflOWC MaRINET2 Database. Water 2020, 12, 992. [Google Scholar] [CrossRef]
- Tagliafierro, B.; Montuori, R.; Vayas, I.; Ropero-Giralda, P.; Crespo, A.; Domìnguez, J.; Altomare, C.; Viccione, G.; Gòmez-Gesteira, M. A new open source solver for modelling fluid-structure interaction: Case study of a point-absorber wave energy converter with a power take-off unit. In Proceedings of the 11th International Conference on Structural Dynamics, Athens, Greece, 23–26 November 2020. [Google Scholar] [CrossRef]
- Ropero-Giralda, P.; Crespo, A.J.; Tagliafierro, B.; Altomare, C.; Domínguez, J.M.; Gómez-Gesteira, M.; Viccione, G. Efficiency and survivability analysis of a point-absorber wave energy converter using DualSPHysics. Renew. Energy 2020, 162, 1763–1776. [Google Scholar] [CrossRef]
- Ropero-Giralda, P.; Crespo, A.J.C.; Coe, R.G.; Tagliafierro, B.; Domínguez, J.M.; Bacelli, G.; Gómez-Gesteira, M. Modelling a Heaving Point-Absorber with a Closed-Loop Control System Using the DualSPHysics Code. Energies 2021, 14, 760. [Google Scholar] [CrossRef]
- Quartier, N.; Ropero-Giralda, P.; Domínguez, J.M.; Stratigaki, V.; Troch, P. Influence of the Drag Force on the Average Absorbed Power of Heaving Wave Energy Converters Using Smoothed Particle Hydrodynamics. Water 2021, 13, 384. [Google Scholar] [CrossRef]
- Mokos, A.; Rogers, B.D.; Stansby, P.K.; Domínguez, J.M. Multi-phase SPH modelling of violent hydrodynamics on GPUs. Comput. Phys. Commun. 2015, 196, 304–316. [Google Scholar] [CrossRef]
- Ruffini, G.; Briganti, R.; De Girolamo, P.; Stolle, J.; Ghiassi, B.; Castellino, M. Numerical Modelling of Flow-Debris Interaction during Extreme Hydrodynamic Events with DualSPHysics-CHRONO. Appl. Sci. 2021, 11, 3618. [Google Scholar] [CrossRef]
- Brufau, P.; Garcia-Navarro, P. Two-dimensional dam break flow simulation. Int. J. Numer. Methods Fluids 2000, 33, 35–57. [Google Scholar] [CrossRef]
- Liang, Q.; Marche, F. Numerical resolution of well-balanced shallow water equations with complex source terms. Adv. Water Resour. 2009, 32, 873–884. [Google Scholar] [CrossRef]
- Biscarini, C.; Di Francesco, S.; Manciola, P. CFD modelling approach for dam break flow studies. Hydrol. Earth Syst. Sci. 2010, 14. [Google Scholar] [CrossRef]
- Ozmen-Cagatay, H.; Kocaman, S. Dam-break flows during initial stage using SWE and RANS approaches. J. Hydraul. Res. 2010, 48, 603–611. [Google Scholar] [CrossRef]
- Lauber, G.; Hager, W.H. Experiments to dambreak wave: Horizontal channel. J. Hydraul. Res. 1998, 36, 291–307. [Google Scholar] [CrossRef]
- Launder, B.; Spalding, D. The Numerical Computation of Turbulent Flow Computer Methods. Comput. Methods Appl. Mech. Eng. 1974, 3, 269–289. [Google Scholar] [CrossRef]
- Liu, G.; Liu, M. Smoothed Particle Hydrodynamics: A Meshfree Particle Method; World Scientific: Singapore, 2003. [Google Scholar] [CrossRef]
- Wendland, H. Piecewise polynomial, positive definite and compactly supported radial basis functions of minimal degree. Adv. Comput. Math. 1995, 4, 389–396. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Cas, R.A.F.; Kos, A.M.; Hallworth, M. Gravity currents descending a ramp in a stratified tank. J. Fluid Mech. 1999, 379, 39–69. [Google Scholar] [CrossRef]
- Monaghan, J.J. Smoothed Particle Hydrodynamics. Annu. Rev. Astron. Astrophys. 1992, 30, 543–574. [Google Scholar] [CrossRef]
- Fourtakas, G.; Dominguez, J.M.; Vacondio, R.; Rogers, B.D. Local uniform stencil (LUST) boundary condition for arbitrary 3-D boundaries in parallel smoothed particle hydrodynamics (SPH) models. Comput. Fluids 2019, 190, 346–361. [Google Scholar] [CrossRef]
- Antuono, M.; Colagrossi, A.; Marrone, S. Numerical diffusive terms in weakly-compressible SPH schemes. Comput. Phys. Commun. 2012, 183, 2570–2580. [Google Scholar] [CrossRef]
- Dalrymple, R.A.; Knio, O. SPH modelling of water waves. In Proceedings of the ASCE Conference on Coastal Dynamics ’01, Lund, Sweden, 11–15 June 2001; pp. 779–787. [Google Scholar] [CrossRef]
- Crespo, A.; Gómez-Gesteira, M.; Dalrymple, R. Boundary conditions generated by dynamic particles in SPH methods. Comput. Mater. Contin. 2007, 5, 173–184. [Google Scholar]
- Domínguez, J.M.; Fourtakas, G.; Cercós-Pita, J.L.; Vacondio, R.; Rogers, B.D.; Crespo, A. Evaluation of reliability and efficiency of different boundary conditions in an SPH code. In Proceedings of the 10th International SPHERIC Workshop, Parma, Italy, 16–18 June 2015; pp. 341–348. [Google Scholar]
- English, A.; Domínguez, J.; Vacondio, R.; Crespo, A.; Stansby, P.; Lind, S.; Chiapponi, L.; Gómez-Gesteira, M. Modified dynamic boundary conditions (mDBC) for general purpose smoothed particle hydrodynamics (SPH): Application to tank sloshing, dam break and fish pass problems. Comput. Part. Mech. 2021. [Google Scholar] [CrossRef]
- Marrone, S.; Antuono, M.; Colagrossi, A.; Colicchio, G.; Le Touzé, D.; Graziani, G. δ-SPH model for simulating violent impact flows. Comput. Methods Appl. Mech. Eng. 2011, 200, 1526–1542. [Google Scholar] [CrossRef]
- Liu, M.; Liu, G. Restoring particle consistency in smoothed particle hydrodynamics. Appl. Numer. Math. 2006, 56, 19–36. [Google Scholar] [CrossRef]
- Tagliafierro, B.; Crespo, A.; González-Cao, J.; Altomare, C.; Sande, J.; Pe na, E.; Gómez-Gesteira, M. Numerical modelling of a multi-chambered low-reflective caisson. Appl. Ocean Res. 2020, 103, 102325. [Google Scholar] [CrossRef]
- Willmott, C.J.; Ackleson, S.G.; Davis, R.E.; Feddema, J.J.; Klink, K.M.; Legates, D.R.; O’Donnell, J.; Rowe, C.M. Statistics for the evaluation and comparison of models. J. Geophys. Res. Ocean. 1985, 90, 8995–9005. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1.0 | 1.2 | ||
|---|---|---|---|
| BC | mDBC | mDBC | |
 |  | ||
| P1 | 0.9182 | 0.9016 | |
| 0.9936 | 0.9925 | ||
| P2 | 0.6692 | 0.6411 | |
| 0.9243 | 0.9216 |
| 1.2 | 1.0 | 1.0 | ||
|---|---|---|---|---|
| BC | DBC | DBC | mDBC | |
 |  |  | ||
| P2 | 0.4083 | 0.6427 | 0.6692 | |
| 0.7576 | 0.9263 | 0.9243 |
| 1.0 | 1.0 | ||
|---|---|---|---|
| BC | mDBC | mDBC | |
 |  | ||
| P3 | 0.6806 | 0.7043 | |
| 0.9372 | 0.9114 | ||
| P4 | 0.7017 | 0.7173 | |
| 0.9316 | 0.9432 |
| Simulations | |||||||
|---|---|---|---|---|---|---|---|
| 1.0 | 1.0 | 1.2 | 1.2 | 1.0 | 1.2 | ||
| BC | mDBC | mDBC | mDBC | DBC | DBC | mDBC | |
 |  |  |  |  |  | ||
| P1 | 0.9011 | 0.9182 | 0.9016 | 0.8522 | 0.8841 | 0.9261 | |
| 0.9931 | 0.9936 | 0.9925 | 0.9898 | 0.9917 | 0.9940 | ||
| P2 | 0.6665 | 0.6692 | 0.6411 | 0.4083 | 0.6427 | 0.7166 | |
| 0.9102 | 0.9243 | 0.9216 | 0.7576 | 0.9263 | 0.9456 | ||
| P3 | 0.6806 | 0.7043 | 0.6388 | 0.4916 | 0.5751 | 0.6947 | |
| 0.9372 | 0.9114 | 0.8993 | 0.8683 | 0.8994 | 0.9394 | ||
| P4 | 0.7017 | 0.7173 | 0.7398 | 0.7397 | 0.7443 | 0.6374 | |
| 0.9316 | 0.9432 | 0.9576 | 0.9659 | 0.9680 | 0.9021 | ||
| P5 | 0.4566 | 0.6139 | 0.6901 | 0.6551 | 0.6785 | 0.5810 | |
| 0.8788 | 0.9162 | 0.9169 | 0.9139 | 0.9154 | 0.8949 | ||
| Averaged | 0.6813 | 0.7246 | 0.7223 | 0.6294 | 0.7049 | 0.7112 | |
| 0.9302 | 0.9377 | 0.9381 | 0.8991 | 0.9401 | 0.9352 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Capasso, S.; Tagliafierro, B.; Güzel, H.; Yilmaz, A.; Dal, K.; Kocaman, S.; Viccione, G.; Evangelista, S. A Numerical Validation of 3D Experimental Dam-Break Wave Interaction with a Sharp Obstacle Using DualSPHysics. Water 2021, 13, 2133. https://doi.org/10.3390/w13152133
Capasso S, Tagliafierro B, Güzel H, Yilmaz A, Dal K, Kocaman S, Viccione G, Evangelista S. A Numerical Validation of 3D Experimental Dam-Break Wave Interaction with a Sharp Obstacle Using DualSPHysics. Water. 2021; 13(15):2133. https://doi.org/10.3390/w13152133
Chicago/Turabian StyleCapasso, Salvatore, Bonaventura Tagliafierro, Hasan Güzel, Ada Yilmaz, Kaan Dal, Selahattin Kocaman, Giacomo Viccione, and Stefania Evangelista. 2021. "A Numerical Validation of 3D Experimental Dam-Break Wave Interaction with a Sharp Obstacle Using DualSPHysics" Water 13, no. 15: 2133. https://doi.org/10.3390/w13152133
APA StyleCapasso, S., Tagliafierro, B., Güzel, H., Yilmaz, A., Dal, K., Kocaman, S., Viccione, G., & Evangelista, S. (2021). A Numerical Validation of 3D Experimental Dam-Break Wave Interaction with a Sharp Obstacle Using DualSPHysics. Water, 13(15), 2133. https://doi.org/10.3390/w13152133