
Research Progress of Advanced Design Method, Numerical Simulation, and Experimental Technology of Pumps in Deep-Sea Resource Exploitation



 ,
, 
 ,
,  ,
, 
Abstract
1. Introduction
2. Design and Optimization Methods
2.1. Performance of Pump
2.2. Performance of Deep Sea Lift Pump

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
2.3. Design Method of Deep Sea Lift Pump
2.3.1. Enlarged Flow Design Method
2.3.2. Inverse Design Method
2.4. Optimization Methods
2.4.1. Parameter Modeling Optimization
2.4.2. Alternative Optimization Methods
3. Numerical Simulation Methods
3.1. Control Equations of Fluids
3.2. Euler–Euler Model
3.2.1. Two-Fluid Model
3.2.2. Mixture Model
3.3. Discrete Element Method
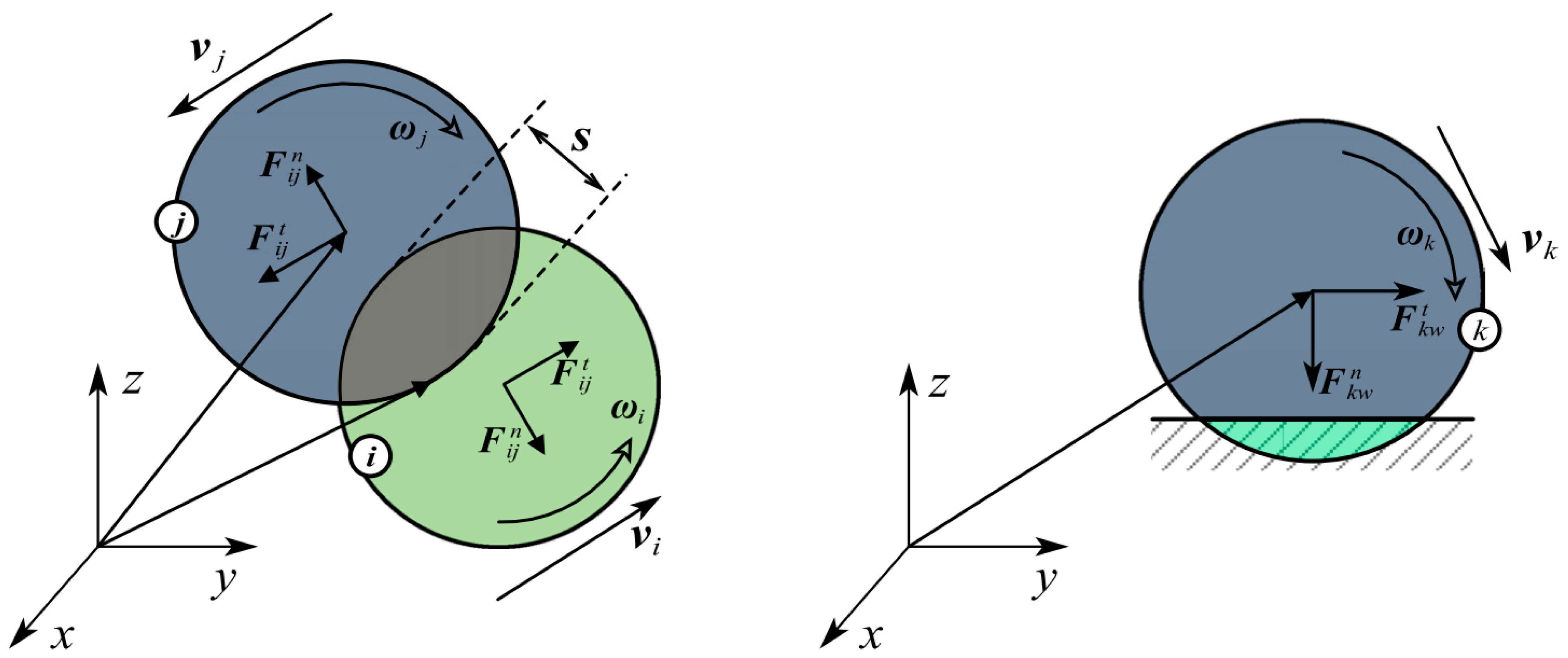
3.3.1. Soft-Sphere Models
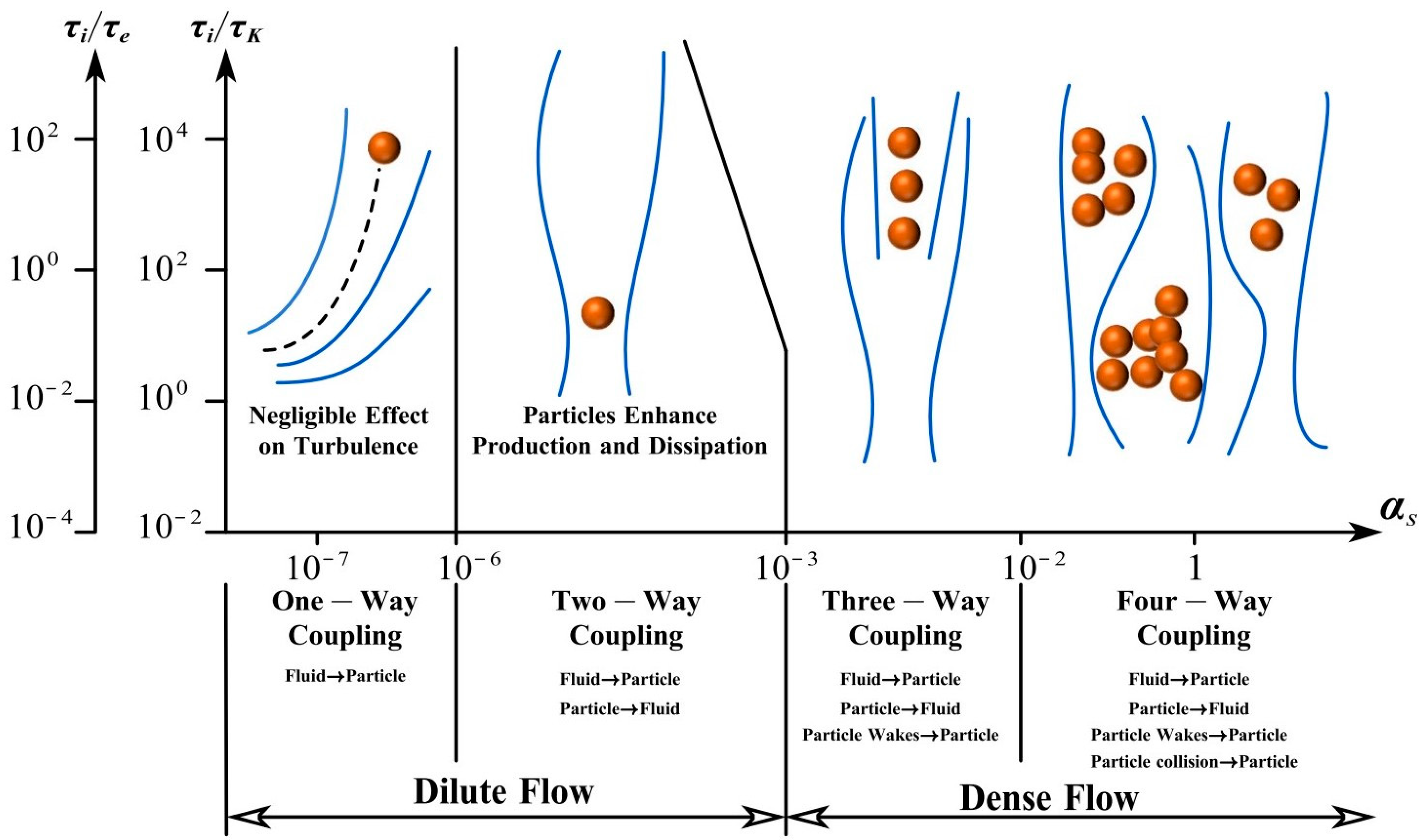
3.3.2. Particle–Fluid Interaction Forces
- (1)
- Schiller Naumann model [26]
- (2)
- Wen–Yu model [25]
- (3)
- Gidaspow model [120]
- (4)
- Syamlal O’Brien model [121]
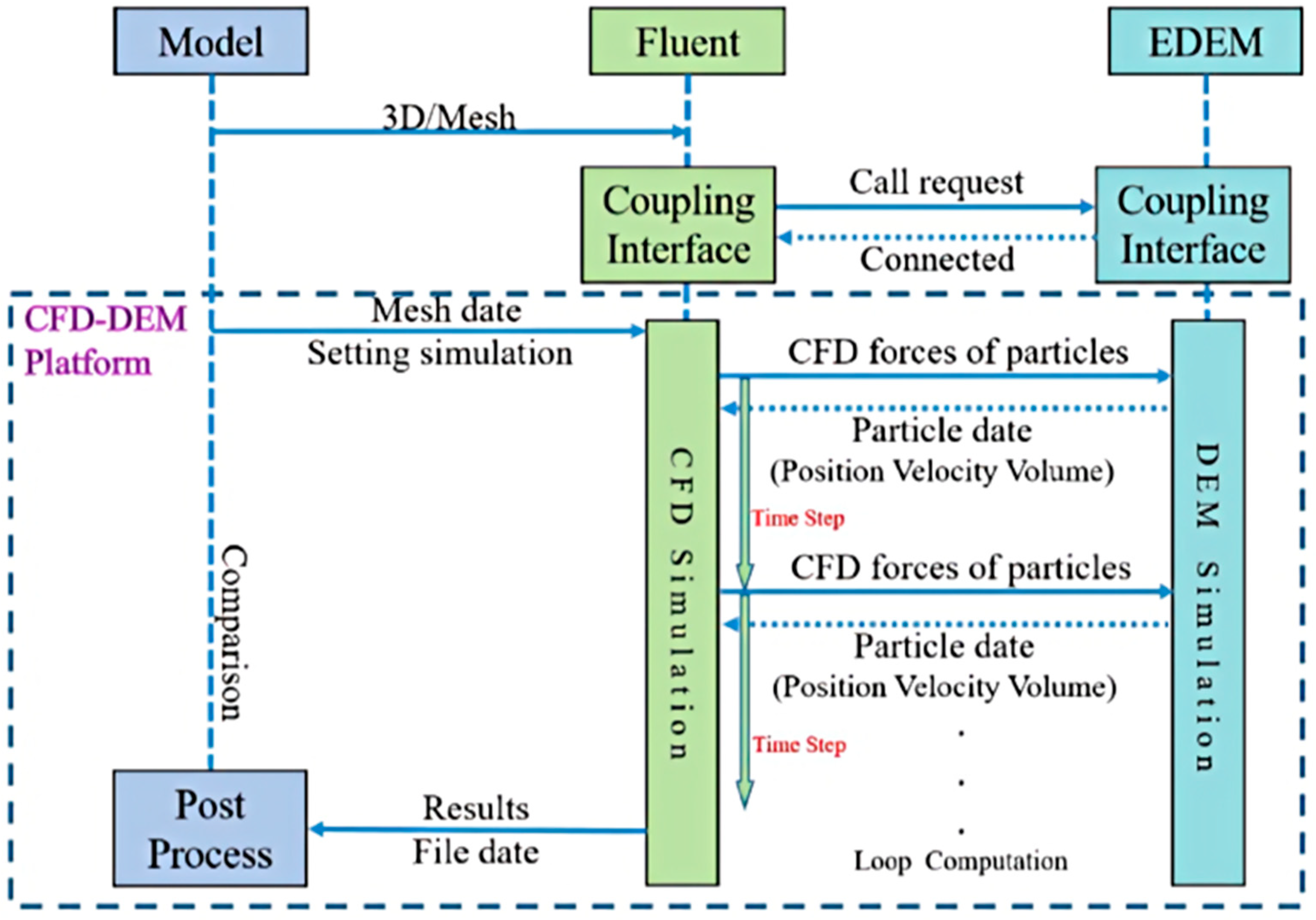
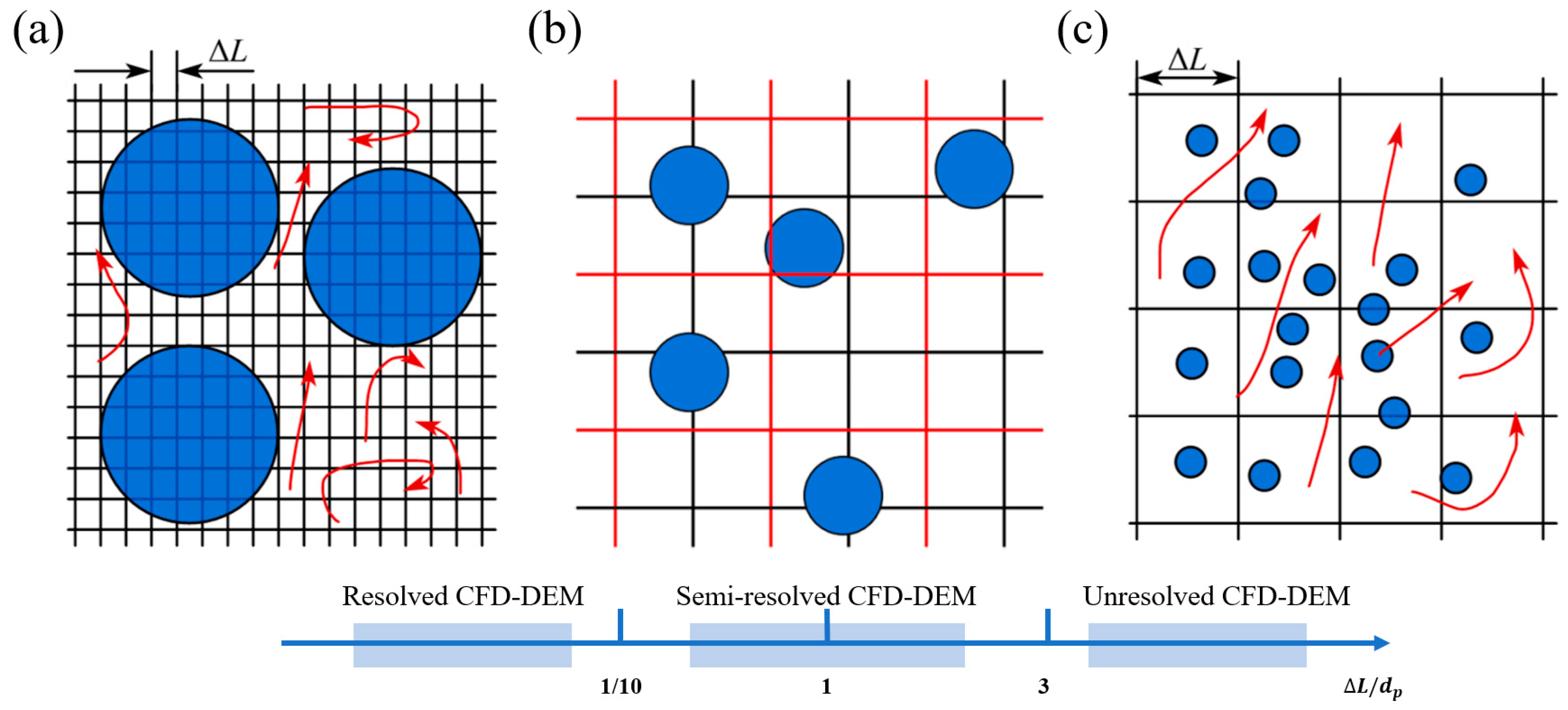
3.3.3. Coupling Scheme between CFD and DEM
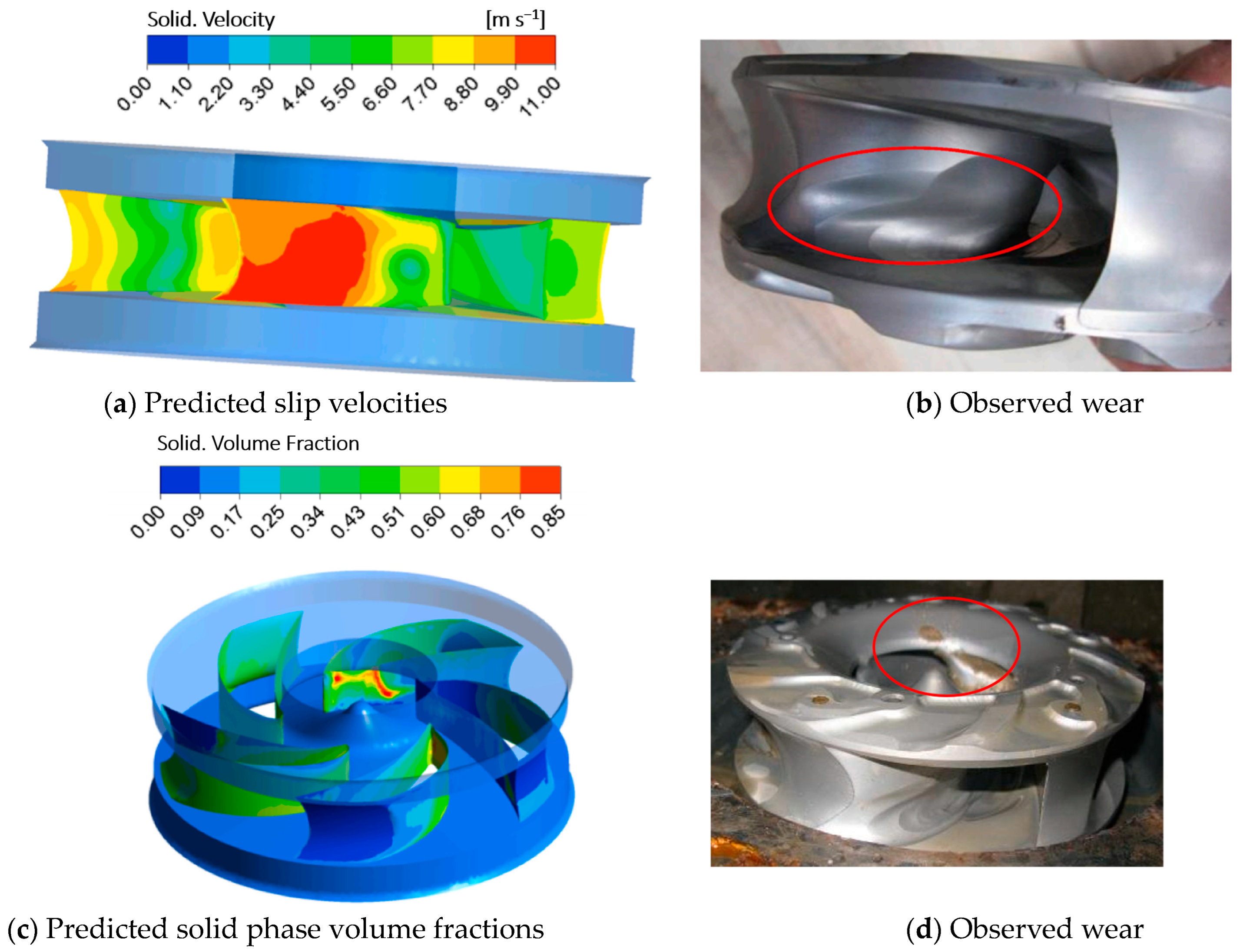
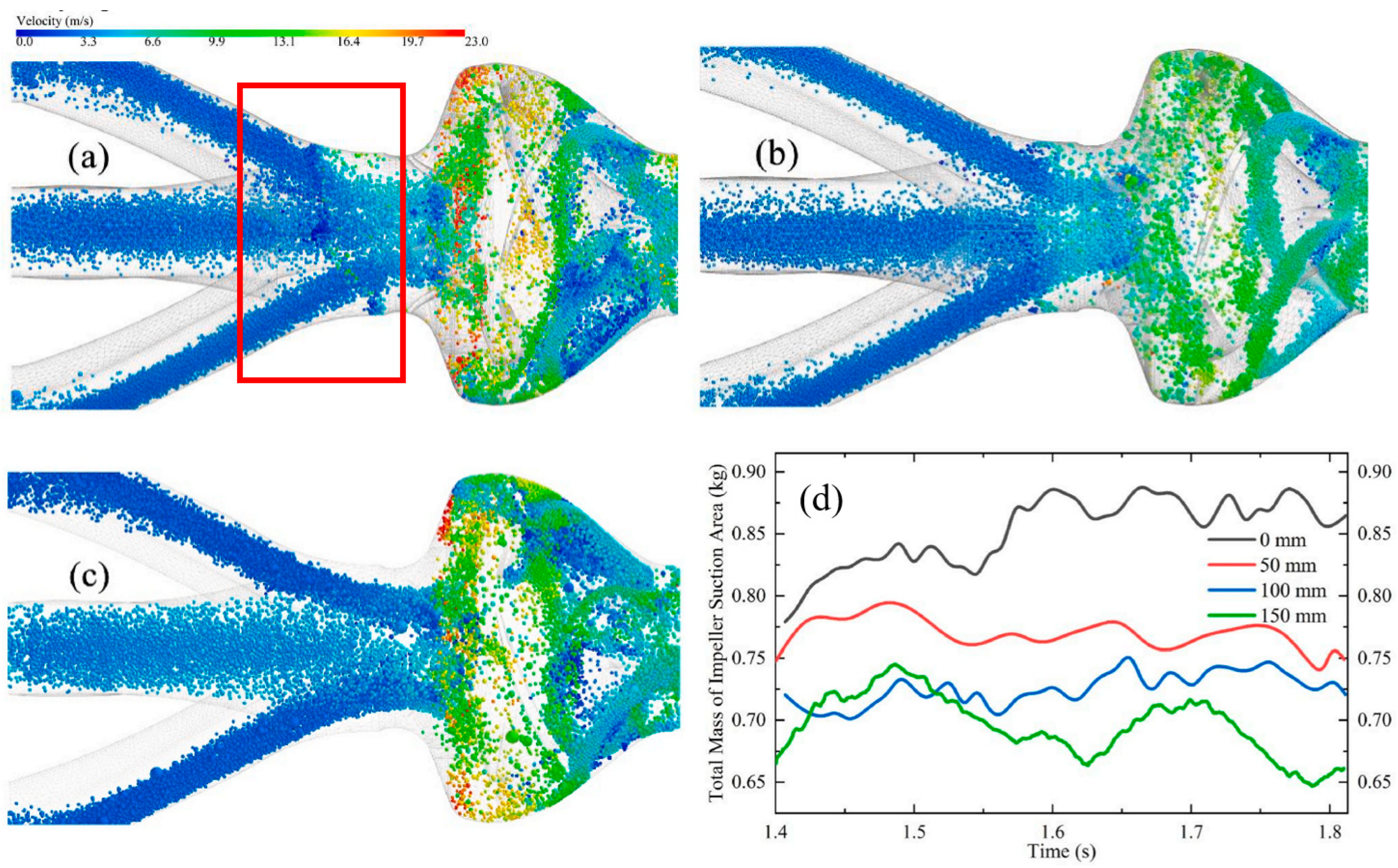
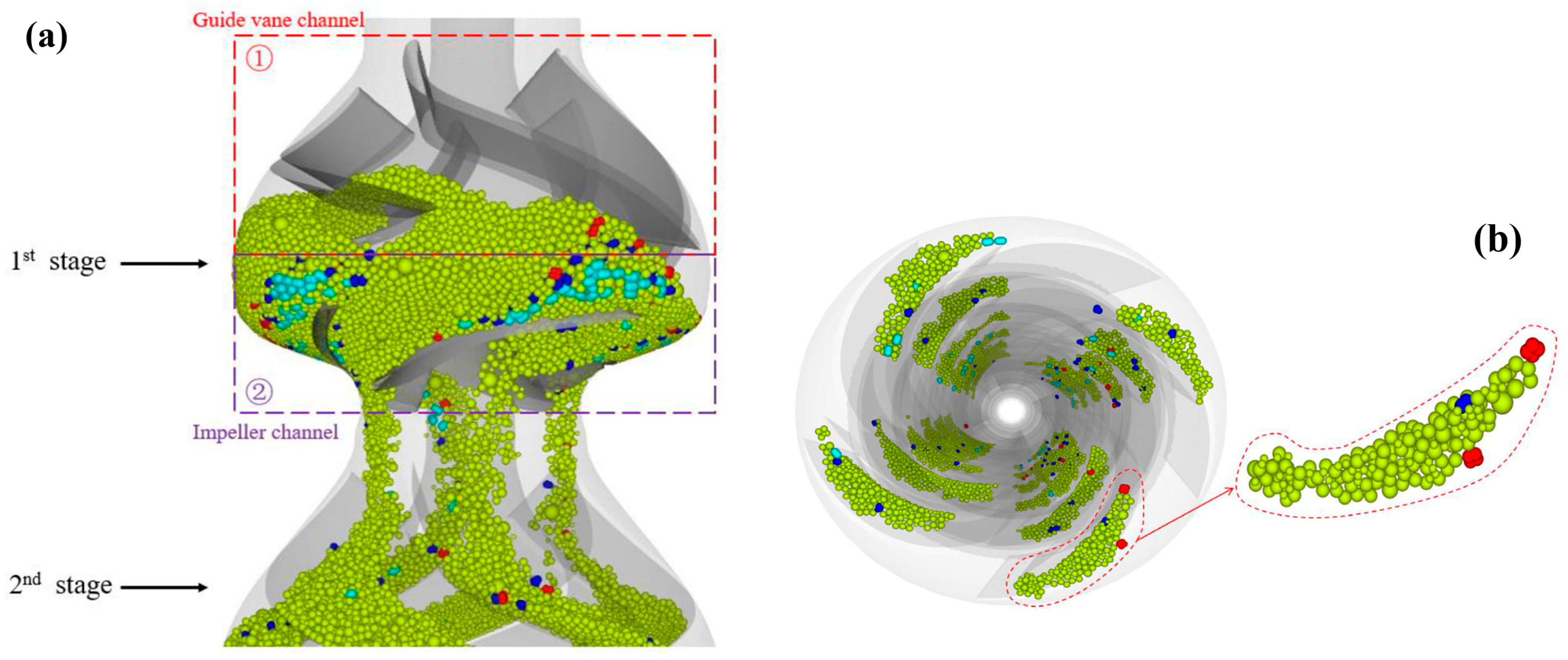
3.3.4. Applications of CFD–DEM in Deep-Sea Lift Pump
3.4. Discrete Phase Model (DPM)
3.5. Model Modification
Modified Drag Model
4. Experimental Research
4.1. External Characteristic Experiment
4.2. Visualization Experiment
4.3. Wear Experiment
5. Conclusions and Outlook
5.1. Conclusions
5.2. Outlook
- Presently, no robust design methodologies exist for deep-sea lifting pumps; however, employing numerical simulations in conjunction with optimization algorithms and parametric modeling proves significantly efficacious for the design of these pumps under complex operational conditions. However, the optimization of deep-sea lifting pumps in solid–liquid two-phase flow conditions remain inadequately explored.
- Optimization studies of deep-sea lifting pumps predominantly consider efficiency in steady-state conditions designed for constant speed. Considering the complexity of deep-sea mining applications, it is pertinent to evaluate efficiency across variable speeds and different operating states. Moreover, attention must be given to the impacts of wear on the pump’s efficiency and reliability, suggesting a shift towards optimization goals that include multi-speed, multi-state efficiency, and wear characteristics.
- In solid–liquid two-phase flows, the presence of solid particles can induce changes in the flow pattern, particle clogging and deposition, wear, and erosion, as well as uneven particle concentration and distribution. These factors may lead to flow instability and separation, thereby triggering rotational stalls. Rotational stalls can significantly affect the efficiency of pumps, increase vibration and noise, exacerbate component wear, and lead to operational instability, negatively impacting the performance and lifespan of the pump. Therefore, to effectively prevent and mitigate the occurrence of rotational stalls, it is necessary to optimize the design of impellers and flow passages and to adjust and maintain operating conditions. These strategies are crucial for enhancing system reliability and efficiency, and for extending the service life of the equipment.
- Considering the particle systems within deep-sea lifting pumps, which often comprise a large number of particles, the associated (DEM) simulations require substantial computational effort. The computational efficiency is further compromised when DEM is coupled with computational fluid dynamics (CFD). Thus, enhancing the computational efficiency of the integrated CFD-DEM approach is crucial for practical deployment. Integration of the Coarse-Grained Methodology (CGM) into the CFD-DEM framework could substantially lower computational demands. Modern commercial software now often incorporates GPU-accelerated parallel computation techniques to facilitate CFD-DEM solvers, as evidenced by platforms such as EDEM and Rocky DEM.
- The CFD-DEM approach is predominantly employed for investigating solid–liquid two-phase flows in rotating machinery. However, the complex structural demands of these machines make mesh generation particularly challenging. The Smoothed Particle Hydrodynamics (SPH) method, representing a novel mesh-free approach, provides extensive potential for addressing complex challenges such as free surface flows, multiphase flows, and interactions between fluids and particles.
- Modifications to computational models for two-phase flow pumps have traditionally focused on the effects of turbulence on drag forces. However, the influence of additional forces warrants consideration. It is imperative that these models are refined to enhance the simulation accuracy of slurry pumps.
- Particles in deep-sea lifting pumps are typically heterogeneous and non-spherical. Much of the extant research is based on spherical particles, with a notable deficiency in studies addressing non-spherical particles and their fragmentation.
- For visualization experiments concerning deep-sea lifting pumps, the identification and velocimetry of particles present intricate challenges. A promising resolution could involve deploying advanced image processing technologies anchored in machine learning methodologies. Such enhancements are expected to enrich the database for impellers in two-phase flow pumps significantly.
Funding
Data Availability Statement
Conflicts of Interest
References
- Hein, J.R.; Mizell, K.; Koschinsky, A.; Conrad, T.A. Deep-ocean mineral deposits as a source of critical metals for high- and green-technology applications: Comparison with land-based resources. Ore Geol. Rev. 2013, 51, 1–14. [Google Scholar] [CrossRef]
- Petersen, S.; Krätschell, A.; Augustin, N.; Jamieson, J.; Hein, J.R.; Hannington, M.D. News from the seabed—Geological characteristics and resource potential of deep-sea mineral resources. Mar. Policy 2016, 70, 175–187. [Google Scholar] [CrossRef]
- Van Wijk, J. Vertical Hydraulic Transport for Deep Sea Mining: A Study into Flow Assurance. PhD Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- Chung, J.S. Deep-ocean mining technology: Development II. In Proceedings of the ISOPE Ocean Mining and Gas Hydrates Symposium, Changsha, China, 9–13 October 2005; p. ISOPE–M-05-001. [Google Scholar]
- IUCN. DEEP-SEA MINING. Available online: https://www.iucn.org/sites/default/files/2022-07/iucn-issues-brief_dsm_update_final.pdf (accessed on 7 May 2022).
- Glasby, G.P. Lessons Learned from Deep-Sea Mining. Science 2000, 289, 551–553. [Google Scholar] [CrossRef] [PubMed]
- Hannington, M.; Petersen, S.; Krätschell, A. Subsea mining moves closer to shore. Nat. Geosci. 2017, 10, 158–159. [Google Scholar] [CrossRef]
- Wen, H.; Liu, S.-J.; Zou, W.-S.; Hu, X.-Z.; Dong, Z. Effects of particle diameter on erosion wear characteristic of deep-sea mining pump. In Proceedings of the 2019 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Changsha, China, 12–13 January 2019; pp. 507–512. [Google Scholar]
- Shaw, J.L. Nodule mining—Three miles deep! Mar. Georesour. Geotechnol. 1993, 11, 181–197. [Google Scholar] [CrossRef]
- Peacock, T.; Ouillon, R. The fluid mechanics of deep-sea mining. Annu. Rev. Fluid Mech. 2023, 55, 403–430. [Google Scholar] [CrossRef]
- Yoon, C.H.; Lee, D.K.; Park, Y.C.; Kwon, S.K. On-land Hydraulic Pumping Experiments of 30-meter Height Scale. In Proceedings of the Fifteenth International Offshore and Polar Engineering Conference, Seoul, Repubilc of Korea, 19–24 June 2005. [Google Scholar]
- Zou, W. COMRA′s research on lifting motor pump. In Proceedings of the ISOPE Ocean Mining and Gas Hydrates Symposium, Lisbon, Portugal, 1–6 July 2007; p. ISOPE–M-07-032. [Google Scholar]
- Deng, L.; Hu, Q.; Chen, J.; Kang, Y.; Liu, S. Particle distribution and motion in six-stage centrifugal pump by means of slurry experiment and CFD-DEM simulation. J. Mar. Sci. Eng. 2021, 9, 716. [Google Scholar] [CrossRef]
- Kang, Y.; Liu, S.; Zou, W.; Zhao, H.; Hu, X. Design and analysis of an innovative deep-sea lifting motor pump. Appl. Ocean Res. 2019, 82, 22–31. [Google Scholar] [CrossRef]
- Ji, L.; Li, W.; Shi, W.; Tian, F.; Agarwal, R. Diagnosis of internal energy characteristics of mixed-flow pump within stall region based on entropy production analysis model. Int. Commun. Heat Mass Transf. 2020, 117, 104784. [Google Scholar] [CrossRef]
- Li, W.; Huang, Y.; Ji, L.; Ma, L.; Agarwal, R.K.; Awais, M. Prediction model for energy conversion characteristics during transient processes in a mixed-flow pump. Energy 2023, 271, 127082. [Google Scholar] [CrossRef]
- Tarodiya, R.; Gandhi, B.K. Numerical simulation of a centrifugal slurry pump handling solid-liquid mixture: Effect of solids on flow field and performance. Adv. Powder Technol. 2019, 30, 2225–2239. [Google Scholar] [CrossRef]
- Zhou, L.; Han, C.; Bai, L.; Li, W.; El-Emam, M.A.; Shi, W. CFD-DEM bidirectional coupling simulation and experimental investigation of particle ejections and energy conversion in a spouted bed. Energy 2020, 211, 118672. [Google Scholar] [CrossRef]
- Zhang, A.; Jiang, M.; Thornton, C. A coupled CFD-DEM method with moving mesh for simulating undrained triaxial tests on granular soils. Granul. Matter 2020, 22, 13. [Google Scholar] [CrossRef]
- Chen, Q.; Xiong, T.; Zhang, X.; Jiang, P. Study of the hydraulic transport of non-spherical particles in a pipeline based on the CFD-DEM. Eng. Appl. Comput. Fluid Mech. 2020, 14, 53–69. [Google Scholar] [CrossRef]
- Zhao, L.; Chang, Z.; Zhang, Z.; Huang, R.; He, D. Visualization of gas-liquid flow pattern in a centrifugal pump impeller and its influence on the pump performance. Meas. Sens. 2021, 13, 100033. [Google Scholar] [CrossRef]
- Lobanoff, V.S.; Ross, R.R. Centrifugal Pumps: Design and Application; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Li, H.; Han, Y.; Shi, W.; Tiganik, T.; Zhou, L. Automatic optimization of centrifugal pump based on adaptive single-objective algorithm and computational fluid dynamics. Eng. Appl. Comput. Fluid Mech. 2022, 16, 2222–2242. [Google Scholar] [CrossRef]
- Zhou, L.; Shi, W.; Lu, W.; Hu, B.; Wu, S. Numerical investigations and performance experiments of a deep-well centrifugal pump with different diffusers. J. Fluids Eng. 2012, 134, 071102. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, L.; Bai, L.; Shi, W.; Li, W.; Wang, C.; Agarwal, R. Experimental study and transient CFD/DEM simulation in a fluidized bed based on different drag models. RSC Adv. 2017, 7, 12764–12774. [Google Scholar] [CrossRef]
- Ma, H.; Zhao, Y. Investigating the fluidization of disk-like particles in a fluidized bed using CFD-DEM simulation. Adv. Powder Technol. 2018, 29, 2380–2393. [Google Scholar] [CrossRef]
- Fairbank, L.C., Jr. Effect on the characteristics of centrifugal pumps. Trans. Am. Soc. Civ. Eng. 1942, 107, 1564–1575. [Google Scholar] [CrossRef]
- Cave, I. Effects of suspended solids on the performance of centrifugal pumps. Proc. Hydro Transp. 1976, 4, 43. [Google Scholar]
- Wiedenroth, W. The influence of sand and gravel on the characteristics of centrifugal pumps, some aspects of wear in hydraulic transportation installations. In Proceedings of the Hydrotransport, Coventry, UK, 1–4 September 1970. [Google Scholar]
- Gahlot, V.K.; Seshadri, V.; Malhotra, R.C. Effect of Density, Size Distribution, and Concentration of Solid on the Characteristics of Centrifugal Pumps. J. Fluids Eng. 1992, 114, 386–389. [Google Scholar] [CrossRef]
- Kazim, K.A.; Maiti, B.; Chand, P. A correlation to predict the performance characteristics of centrifugal pumps handling slurries. Proc. Inst. Mech. Eng. Part A J. Power Energy 1997, 211, 147–157. [Google Scholar] [CrossRef]
- Vocadlo, J.; Koo, J.; Prang, A. Performance of Centrifugal Pumps in Slurry Service; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1974. [Google Scholar]
- Engin, T.; Gur, M. Comparative Evaluation of Some Existing Correlations to Predict Head Degradation of Centrifugal Slurry Pumps. J. Fluids Eng. 2003, 125, 149–157. [Google Scholar] [CrossRef]
- Gandhi, B.K.; Singh, S.; Seshadri, V. Performance characteristics of centrifugal slurry pumps. J. Fluids Eng. 2001, 123, 271–280. [Google Scholar] [CrossRef]
- Engin, T.; Gur, M. Performance Characteristics of a Centrifugal Pump Impeller with Running Tip Clearance Pumping Solid-Liquid Mixtures. J. Fluids Eng. -Trans. Asme 2001, 123, 532–538. [Google Scholar] [CrossRef]
- Kuntz, G. The technical advantages of submersible motor pumps in deep sea technology and the delivery of manganese nodules. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 1979; p. OTC–3367-MS. [Google Scholar]
- Hao, Y.; Hao, J.; Zuchao, Z.; Xianghui, S.; Wenqi, L.; Gruszczynski, M.; Qiangmin, D.; Panlong, G. Review of the hydraulic and structural design of high-speed centrifugal pumps. Front. Energy Res. 2022, 10, 899093. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, R. A method for calculating the increasing coefficient of centrifugal pump with low specific speed. J. Mech. Eng. 2005, 41, 203–205. [Google Scholar] [CrossRef]
- Hawthorne, W.; Wang, C.; Tan, C.; McCune, J. Theory of blade design for large deflections: Part I—Two-dimensional cascade. J. Eng. Gas Turbines Power 1984, 206, 346–353. [Google Scholar] [CrossRef]
- Tan, C.; Hawthorne, W.; McCune, J.; Wang, C. Theory of blade design for large deflections: Part II—Annular cascades. J. Eng. Gas Turbines Power 1984, 106, 354–365. [Google Scholar] [CrossRef]
- Zangeneh, M. Inverse design of centrifugal compressor vaned diffusers in inlet shear flows. J. Turbomach. 1996, 118, 385–393. [Google Scholar] [CrossRef]
- Zangeneh, M.; Goto, A.; Harada, H. On the role of three-dimensional inverse design methods in turbomachinery shape optimization. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 1999, 213, 27–42. [Google Scholar] [CrossRef]
- Lu, J.; Xi, G.; Qi, D. Blade optimization of mixed-flow pump using inverse design method and neural network. Xi’an Jiaotong Daxue Xuebao (J. Xi’an Jiaotong Univ.) 2004, 38, 308–312. [Google Scholar]
- Mäkelä, M. Experimental design and response surface methodology in energy applications: A tutorial review. Energy Convers. Manag. 2017, 151, 630–640. [Google Scholar] [CrossRef]
- Wang, W.; Osman, M.K.; Pei, J.; Yuan, S.; Cao, J.; Osman, F.K. Efficiency-house optimization to widen the operation range of the double-suction centrifugal pump. Complexity 2020, 2020, 9737049. [Google Scholar] [CrossRef]
- Shi, G.; Li, H.; Liu, X.; Liu, Z.; Wang, B. Transport performance improvement of a multiphase pump for gas–liquid mixture based on the orthogonal test method. Processes 2021, 9, 1402. [Google Scholar] [CrossRef]
- Pei, J.; Wang, W.; Osman, M.K.; Gan, X. Multiparameter optimization for the nonlinear performance improvement of centrifugal pumps using a multilayer neural network. J. Mech. Sci. Technol. 2019, 33, 2681–2691. [Google Scholar] [CrossRef]
- Gong, X.; Pei, J.; Wang, W.; Osman, M.K.; Jiang, W.; Zhao, J.; Deng, Q. Nature-inspired modified BAT algorithm for the high-efficiency optimization of a multistage centrifugal pump for a reverse osmosis desalination system. J. Mar. Sci. Eng. 2021, 9, 771. [Google Scholar] [CrossRef]
- Lu, R.; Yuan, J.; Wei, G.; Zhang, Y.; Lei, X.; Si, Q. Optimization design of energy-saving mixed flow pump based on MIGA-RBF algorithm. Machines 2021, 9, 365. [Google Scholar] [CrossRef]
- Derakhshan, S.; Pourmahdavi, M.; Abdolahnejad, E.; Reihani, A.; Ojaghi, A. Numerical shape optimization of a centrifugal pump impeller using artificial bee colony algorithm. Comput. Fluids 2013, 81, 145–151. [Google Scholar] [CrossRef]
- Wu, T.; Wu, D.; Ren, Y.; Song, Y.; Gu, Y.; Mou, J. Multi-objective optimization on diffuser of multistage centrifugal pump base on ANN-GA. Struct. Multidiscip. Optim. 2022, 65, 182. [Google Scholar] [CrossRef]
- Wu, T.; Wu, D.; Gao, S.; Song, Y.; Ren, Y.; Mou, J. Multi-objective optimization and loss analysis of multistage centrifugal pumps. Energy 2023, 284, 128638. [Google Scholar] [CrossRef]
- Chen, J.; Shi, W.; Zhang, D. Influence of blade inlet edge position on performance of single-blade centrifugal pump. J. Drain. Irrig. Mach. Eng. 2021, 39, 1093–1099. [Google Scholar]
- Kim, J.-H.; Lee, H.-C.; Kim, J.-H.; Choi, Y.-S.; Yoon, J.-Y.; Yoo, I.-S.; Choi, W.-C. Improvement of hydrodynamic performance of a multiphase pump using design of experiment techniques. J. Fluids Eng. 2015, 137, 081301. [Google Scholar] [CrossRef]
- Hao, H.; Xinkai, L.; Bo, G. Hydraulic optimization of multiphase pump based on CFD and genetic algorithm. Int. J. Grid Distrib. Comput. 2015, 8, 161–170. [Google Scholar] [CrossRef]
- Zhang, J.-Y.; Cai, S.-J.; Li, Y.-J.; Zhou, X.; Zhang, Y.-X. Optimization design of multiphase pump impeller based on combined genetic algorithm and boundary vortex flux diagnosis. J. Hydrodyn. Ser. B 2017, 29, 1023–1034. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, J.; Zhang, Y.; Chen, L. Design optimization of centrifugal pump using radial basis function metamodels. Adv. Mech. Eng. 2014, 6, 457542. [Google Scholar] [CrossRef]
- Hong, S.; Hu, X. Optimization of impeller of deep-sea mining pump for erosive wear reduction based on response surface methodology. Mar. Georesour. Geotechnol. 2023, 41, 295–311. [Google Scholar] [CrossRef]
- Kim, J.-H.; Kim, K.-Y. Analysis and optimization of a vaned diffuser in a mixed flow pump to improve hydrodynamic performance. J. Fluids Eng. 2012, 134, 071104. [Google Scholar] [CrossRef]
- Nourbakhsh, A.; Safikhani, H.; Derakhshan, S. The comparison of multi-objective particle swarm optimization and NSGA II algorithm: Applications in centrifugal pumps. Eng. Optim. 2011, 43, 1095–1113. [Google Scholar] [CrossRef]
- Gan, X.; Pei, J.; Wang, W.; Yuan, S.; Lin, B. Application of a modified MOPSO algorithm and multi-layer artificial neural network in centrifugal pump optimization. Eng. Optim. 2023, 55, 580–598. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, H.; Yang, C.; Li, Y.; Wei, H. Multi-objective shape optimization of helico-axial multiphase pump impeller based on NSGA-II and ANN. Energy Convers. Manag. 2011, 52, 538–546. [Google Scholar] [CrossRef]
- Shojaeefard, M.H.; Hosseini, S.E.; Zare, J. CFD simulation and Pareto-based multi-objective shape optimization of the centrifugal pump inducer applying GMDH neural network, modified NSGA-II, and TOPSIS. Struct. Multidiscip. Optim. 2019, 60, 1509–1525. [Google Scholar] [CrossRef]
- Xu, K.; Wang, G.; Zhang, L.; Wang, L.; Yun, F.; Sun, W.; Wang, X.; Chen, X. Multi-objective optimization of jet pump based on RBF neural network model. J. Mar. Sci. Eng. 2021, 9, 236. [Google Scholar] [CrossRef]
- Cui, B.; Chen, H.; Zhu, Z.; Sun, L.; Sun, L. Optimization of low-temperature multi-stage submersible pump based on blade load. Phys. Fluids 2024, 36, 035157. [Google Scholar] [CrossRef]
- Hu, Q.; Zhai, X.; Li, Z. Multi-objective optimization of deep-sea mining pump based on CFD, GABP neural network and NSGA-III algorithm. J. Mar. Sci. Eng. 2022, 10, 1063. [Google Scholar] [CrossRef]
- Kim, J.-H.; Lee, H.-C.; Yoon, J.-Y.; Lee, K.-Y.; Lee, Y.-K.; Choi, Y.-S. Multi objective optimization of a multiphase pump for offshore plants. In Proceedings of the Fluids Engineering Division Summer Meeting, Chicago, IL, USA, 3–7 August 2014; p. V01BT10A011. [Google Scholar]
- Cancan, P.; Xiaodong, Z.; Zhiguang, G.; Ju, W.; Yan, G. Research on cooperative optimization of multiphase pump impeller and diffuser based on adaptive refined response surface method. Adv. Mech. Eng. 2022, 14, 16878140211072944. [Google Scholar] [CrossRef]
- Yang, H.; Liu, S. A new lifting pump for deep-sea mining. J. Mar. Eng. Technol. 2020, 19, 102–108. [Google Scholar] [CrossRef]
- Kang, Y.; Su, Q.; Liu, S. On the axial thrust and hydraulic performance of a multistage lifting pump for deep-sea mining. Ocean Eng. 2022, 265, 112534. [Google Scholar] [CrossRef]
- Zhou, H.; Chen, L.; Wang, W.; Ren, L.; Shan, H.; Zhang, Z. Abrasive particle wear behavior of 3Cr2W8V steel processed to bionic non-smooth surface by laser. Mater. Sci. Eng. A 2005, 412, 323–327. [Google Scholar] [CrossRef]
- Ma, F.; Zeng, Z.; Gao, Y.; Liu, E.; Xue, Q. Research Status and Progress of Bionic Surface Drag Reduction. China Surface Eng. 2016, 29, 7–15. [Google Scholar]
- Li, K. Study on Drag Reduction Capability of Bionic Dimple Impeller and Dynamic Characteristics of Centrifugal Pump. Master’s Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Gu, Y.; Liu, N.; Mou, J.; Zhou, P.; Qian, H.; Dai, D. Study on solid–liquid two-phase flow characteristics of centrifugal pump impeller with non-smooth surface. Adv. Mech. Eng. 2019, 11, 1687814019848269. [Google Scholar] [CrossRef]
- Ma, H.; Zhou, L.; Liu, Z.; Chen, M.; Xia, X.; Zhao, Y. A review of recent development for the CFD-DEM investigations of non-spherical particles. Powder Technol. 2022, 412, 117972. [Google Scholar] [CrossRef]
- Wen, C.-Y. Mechanics of Fluidization. Chem. Eng. Prog. Symp. Ser. 1966, 162, 100–111. [Google Scholar]
- Lun, C.K.; Savage, S.B.; Jeffrey, D.; Chepurniy, N. Kinetic theories for granular flow: Inelastic particles in Couette flow and slightly inelastic particles in a general flowfield. J. Fluid Mech. 1984, 140, 223–256. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D. A discrete numerical model for granular assemblies. Geotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Deen, N.; Annaland, M.V.S.; Van der Hoef, M.A.; Kuipers, J. Review of discrete particle modeling of fluidized beds. Chem. Eng. Sci. 2007, 62, 28–44. [Google Scholar] [CrossRef]
- Tsuji, Y.; Kawaguchi, T.; Tanaka, T. Discrete particle simulation of two-dimensional fluidized bed. Powder Technol. 1993, 77, 79–87. [Google Scholar] [CrossRef]
- Zhong, W.; Yu, A.; Liu, X.; Tong, Z.; Zhang, H. DEM/CFD-DEM modelling of non-spherical particulate systems: Theoretical developments and applications. Powder Technol. 2016, 302, 108–152. [Google Scholar] [CrossRef]
- Zhu, H.; Zhou, Z.; Yang, R.; Yu, A. Discrete particle simulation of particulate systems: A review of major applications and findings. Chem. Eng. Sci. 2008, 63, 5728–5770. [Google Scholar] [CrossRef]
- Zhu, H.P.; Zhou, Z.Y.; Yang, R.; Yu, A. Discrete particle simulation of particulate systems: Theoretical developments. Chem. Eng. Sci. 2007, 62, 3378–3396. [Google Scholar] [CrossRef]
- Deng, L.; Lu, H.; Liu, S.; Hu, Q.; Yang, J.; Kang, Y.; Sun, P. Particle anti-accumulation design at impeller suction of deep-sea mining pump and evaluation by CFD-DEM simulation. Ocean Eng. 2023, 279, 114598. [Google Scholar] [CrossRef]
- Alfonsi, G. On direct numerical simulation of turbulent flows. Appl. Mech. Rev. 2011, 64, 020802. [Google Scholar] [CrossRef]
- Ran, H.; Luo, X.; Zhang, Y.; Zhuang, B.; Xu, H. Numerical simulation of the unsteady flow in a high-head pump turbine and the runner improvement. In Proceedings of the Fluids Engineering Division Summer Meeting, Jacksonville, FL, USA, 10–14 August 2008; pp. 1115–1123. [Google Scholar]
- Lu, G.; Zuo, Z.; Sun, Y.; Liu, D.; Tsujimoto, Y.; Liu, S. Experimental evidence of cavitation influences on the positive slope on the pump performance curve of a low specific speed model pump-turbine. Renew. Energy 2017, 113, 1539–1550. [Google Scholar] [CrossRef]
- Zhang, X.; Burgstaller, R.; Lai, X.; Gehrer, A.; Kefalas, A.; Pang, Y. Experimental and numerical analysis of performance discontinuity of a pump-turbine under pumping mode. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Grenoble, France, 4–8 July 2016; p. 042003. [Google Scholar]
- Tang, Y.; Lau, Y.; Deen, N.; Peters, E.; Kuipers, J. Direct numerical simulations and experiments of a pseudo-2D gas-fluidized bed. Chem. Eng. Sci. 2016, 143, 166–180. [Google Scholar] [CrossRef]
- Luo, K.; Tan, J.; Wang, Z.; Fan, J. Particle-resolved direct numerical simulation of gas–solid dynamics in experimental fluidized beds. AIChE J. 2016, 62, 1917–1932. [Google Scholar] [CrossRef]
- Blais, B.; Bertrand, F. CFD-DEM investigation of viscous solid–liquid mixing: Impact of particle properties and mixer characteristics. Chem. Eng. Res. Des. 2017, 118, 270–285. [Google Scholar] [CrossRef]
- Cao, W.; Jia, Z.; Zhao, Z.; Zhou, L. Validation and simulation of cavitation flow in a centrifugal pump by filter-based turbulence model. Eng. Appl. Comput. Fluid Mech. 2022, 16, 1724–1738. [Google Scholar] [CrossRef]
- Ku, X.; Li, T.; Løvås, T. CFD–DEM simulation of biomass gasification with steam in a fluidized bed reactor. Chem. Eng. Sci. 2015, 122, 270–283. [Google Scholar] [CrossRef]
- Di Renzo, A.; Di Maio, F.P. Comparison of numerical models for the simulation of binary solid-liquid fluidized beds. Chem. Eng. Process. Process Intensif. 2004, 43, 1187–1201. [Google Scholar]
- Squires, K.D.; Eaton, J.K. Particle response and turbulence modification in isotropic turbulence. Phys. Fluids A Fluid Dyn. 1990, 2, 1191–1203. [Google Scholar] [CrossRef]
- Zhang, Y.; Ran, Z.; Jin, B.; Zhang, Y.; Zhou, C.; Sher, F. Simulation of particle mixing and separation in multi-component fluidized bed using Eulerian-Eulerian method: A review. Int. J. Chem. React. Eng. 2019, 17, 20190064. [Google Scholar] [CrossRef]
- Ostermeier, P.; Vandersickel, A.; Gleis, S.; Spliethoff, H. Three dimensional multi fluid modeling of Geldart B bubbling fluidized bed with complex inlet geometries. Powder Technol. 2017, 312, 89–102. [Google Scholar] [CrossRef]
- Wang, P.; Zhao, J.; Zou, W.; Hu, S. Experimental study and numerical simulation of the solid-phase particles′ influence on outside characteristics of slurry pump. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Beijing, China, 19–23 August 2012; p. 062057. [Google Scholar]
- Zhao, B.; Huang, Z.; Chen, H.; Hou, D. Numerical investigation of solid-liquid two phase flow in a non-clogging centrifugal pump at off-design conditions. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Beijing, China, 19–23 August 2012; p. 062020. [Google Scholar]
- Li, Y.; Zhu, Z.; He, W.; He, Z. Numerical simulation and experimental research on the influence of solid-phase characteristics on centrifugal pump performance. Chin. J. Mech. Eng. 2012, 25, 1184–1189. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; Cui, B.; Zhu, Z.; Dou, H. Numerical simulation and analysis of solid-liquid two-phase flow in centrifugal pump. Chin. J. Mech. Eng. 2013, 26, 53–60. [Google Scholar] [CrossRef]
- Noon, A.A.; Kim, M.-H. Erosion wear on centrifugal pump casing due to slurry flow. Wear 2016, 364, 103–111. [Google Scholar] [CrossRef]
- Peng, G.; Fan, F.; Zhou, L.; Huang, X.; Ma, J. Optimal hydraulic design to minimize erosive wear in a centrifugal slurry pump impeller. Eng. Fail. Anal. 2021, 120, 105105. [Google Scholar] [CrossRef]
- Peng, G.; Chen, Q.; Bai, L.; Hu, Z.; Zhou, L.; Huang, X. Wear mechanism investigation in a centrifugal slurry pump impeller by numerical simulation and experiments. Eng. Fail. Anal. 2021, 128, 105637. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, H.; Hu, Q.; Ji, L.; He, Z.; Shi, W.; Song, X.; Zhou, L. Two-phase flow investigation of sewage pumps with different tip clearance via computational fluid dynamics and multi-factor ANOVA. Eng. Appl. Comput. Fluid Mech. 2024, 18, 2322514. [Google Scholar] [CrossRef]
- Wang, L.; Chu, X. Validation of an improved two-fluid model with particle rotation for gas-solid fluidized bed. Particuology 2023, 81, 149–161. [Google Scholar] [CrossRef]
- Ostermeier, P.; Dawo, F.; Vandersickel, A.; Gleis, S.; Spliethoff, H. Numerical calculation of wall-to-bed heat transfer coefficients in Geldart B bubbling fluidized beds with immersed horizontal tubes. Powder Technol. 2018, 333, 193–208. [Google Scholar] [CrossRef]
- Nikolopoulos, A.; Papafotiou, D.; Nikolopoulos, N.; Grammelis, P.; Kakaras, E. An advanced EMMS scheme for the prediction of drag coefficient under a 1.2 MWth CFBC isothermal flow—Part I: Numerical formulation. Chem. Eng. Sci. 2010, 65, 4080–4088. [Google Scholar] [CrossRef]
- Di Renzo, A.; Di Maio, F.P. Comparison of contact-force models for the simulation of collisions in DEM-based granular flow codes. Chem. Eng. Sci. 2004, 59, 525–541. [Google Scholar] [CrossRef]
- Ye, M.; van der Hoef, M.A.; Kuipers, J. A numerical study of fluidization behavior of Geldart A particles using a discrete particle model. Powder Technol. 2004, 139, 129–139. [Google Scholar] [CrossRef]
- El-Emam, M.A.; Zhou, L.; Shi, W.; Han, C.; Bai, L.; Agarwal, R. Theories and applications of CFD–DEM coupling approach for granular flow: A review. Arch. Comput. Methods Eng. 2021, 28, 4979–5020. [Google Scholar] [CrossRef]
- Mangadoddy, N.; Vakamalla, T.R.; Kumar, M.; Mainza, A. Computational modelling of particle-fluid dynamics in comminution and classification: A review. Miner. Process. Extr. Metall. 2020, 129, 145–156. [Google Scholar] [CrossRef]
- Kieckhefen, P.; Pietsch, S.; Dosta, M.; Heinrich, S. Possibilities and limits of computational fluid dynamics–discrete element method simulations in process engineering: A review of recent advancements and future trends. Annu. Rev. Chem. Biomol. Eng. 2020, 11, 397–422. [Google Scholar] [CrossRef] [PubMed]
- Rauchenzauner, S.; Schneiderbauer, S. A dynamic spatially averaged two-fluid model for heat transport in moderately dense gas–particle flows. Phys. Fluids 2020, 32, 063307. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhou, L.; Bai, L.; Lv, W.; Agarwal, R.K. Effects of particle diameter and inlet flow rate on gas–solid flow patterns of fluidized bed. ACS Omega 2023, 8, 7151–7162. [Google Scholar] [CrossRef] [PubMed]
- Antypov, D.; Elliott, J. On an analytical solution for the damped Hertzian spring. Europhys. Lett. 2011, 94, 50004. [Google Scholar] [CrossRef]
- Zhou, C.; Zhao, Y. Discrete element method and its applications in fluidization. CIESC J. 2014, 65, 2520–2534. [Google Scholar]
- Ibrahim, A.; Meguid, M.A. On the development and challenges of particulate flow modeling in geotechnical engineering: A review. In Proceedings of the GeoVirual 2020, Canadian Geotechnical Society, Calgary, AB, Canada, 14–16 September 2020. [Google Scholar]
- Li, Y.; Yu, Z.; Sun, W. Drag coefficient modification for turbulent gas-liquid two-phase flow in a rotodynamic pump. Chem. Eng. J. 2021, 417, 128570. [Google Scholar] [CrossRef]
- Gidaspow, D. Multiphase Flow and Fluidization; Academic Press: San Diego, CA, USA, 1994. [Google Scholar]
- Nezami, E.G.; Hashash, Y.M.A.; Zhao, D.; Ghaboussi, J. Shortest link method for contact detection in discrete element method. Int. J. Numer. Anal. Methods Geomech. 2006, 30, 783–801. [Google Scholar] [CrossRef]
- Zhou, C.; Su, J.; Chen, H.; Shi, Z. Terminal velocity and drag coefficient models for disc-shaped particles based on the imaging experiment. Powder Technol. 2022, 398, 117062. [Google Scholar] [CrossRef]
- Cao, Z.; Tafti, D. Fluid forces and torques in suspensions of oblate cylinders with aspect ratio 1:4. Int. J. Multiph. Flow 2020, 131, 103394. [Google Scholar] [CrossRef]
- Zastawny, M.; Mallouppas, G.; Zhao, F.; Van Wachem, B. Derivation of drag and lift force and torque coefficients for non-spherical particles in flows. Int. J. Multiph. Flow 2012, 39, 227–239. [Google Scholar] [CrossRef]
- Luo, K.; Wang, D.; Jin, T.; Wang, S.; Wang, Z.; Tan, J.; Fan, J. Analysis and development of novel data-driven drag models based on direct numerical simulations of fluidized beds. Chem. Eng. Sci. 2021, 231, 116245. [Google Scholar] [CrossRef]
- Presa-Reyes, M.; Mahyawansi, P.; Hu, B.; McDaniel, D.; Chen, S.-C. DCC-DNN: A deep neural network model to predict the drag coefficients of spherical and non-spherical particles aided by empirical correlations. Powder Technol. 2024, 435, 119388. [Google Scholar] [CrossRef]
- Haider, A.; Levenspiel, O. Drag coefficient and terminal velocity of spherical and nonspherical particles. Powder Technol. 1989, 58, 63–70. [Google Scholar] [CrossRef]
- Ganser, G.H. A rational approach to drag prediction of spherical and nonspherical particles. Powder Technol. 1993, 77, 143–152. [Google Scholar] [CrossRef]
- Leith, D. Drag on nonspherical objects. Aerosol Sci. Technol. 1987, 6, 153–161. [Google Scholar] [CrossRef]
- Tran-Cong, S.; Gay, M.; Michaelides, E.E. Drag coefficients of irregularly shaped particles. Powder Technol. 2004, 139, 21–32. [Google Scholar] [CrossRef]
- Hölzer, A.; Sommerfeld, M. New simple correlation formula for the drag coefficient of non-spherical particles. Powder Technol. 2008, 184, 361–365. [Google Scholar] [CrossRef]
- Sanjeevi, S.K.; Kuipers, J.; Padding, J.T. Drag, lift and torque correlations for non-spherical particles from Stokes limit to high Reynolds numbers. Int. J. Multiph. Flow 2018, 106, 325–337. [Google Scholar] [CrossRef]
- Cao, Z.; Tafti, D.K. Investigation of drag, lift and torque for fluid flow past a low aspect ratio (1:4) cylinder. Comput. Fluids 2018, 177, 123–135. [Google Scholar] [CrossRef]
- Richter, A.; Nikrityuk, P.A. New correlations for heat and fluid flow past ellipsoidal and cubic particles at different angles of attack. Powder Technol. 2013, 249, 463–474. [Google Scholar] [CrossRef]
- Krüger, T.; Kusumaatmaja, H.; Kuzmin, A.; Shardt, O.; Silva, G.; Viggen, E.M. The Lattice Boltzmann Method; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; Volume 10, pp. 4–15. [Google Scholar]
- Fraga Filho, C.A.D. Smoothed Particle Hydrodynamics; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- He, L.; Liu, Z.; Zhao, Y. An extended unresolved CFD-DEM coupling method for simulation of fluid and non-spherical particles. Particuology 2022, 68, 1–12. [Google Scholar] [CrossRef]
- Deb, S.; Tafti, D.K. A novel two-grid formulation for fluid–particle systems using the discrete element method. Powder Technol. 2013, 246, 601–616. [Google Scholar] [CrossRef]
- Wang, Z.; Teng, Y.; Liu, M. A semi-resolved CFD–DEM approach for particulate flows with kernel based approximation and Hilbert curve based searching strategy. J. Comput. Phys. 2019, 384, 151–169. [Google Scholar] [CrossRef]
- Sun, R.; Xiao, H. Diffusion-based coarse graining in hybrid continuum–discrete solvers: Theoretical formulation and a priori tests. Int. J. Multiph. Flow 2015, 77, 142–157. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhou, L.; Bai, L.; Wang, B.; Agarwal, R. Recent advances and perspectives of CFD–DEM simulation in fluidized bed. Arch. Comput. Methods Eng. 2024, 31, 871–918. [Google Scholar] [CrossRef]
- Chen, Y.; Xiong, H.; Cheng, H.; Yu, C.; Xie, J. Effect of particle motion on the hydraulic collection of coarse spherical particles. Acta Mech. Sin. 2020, 36, 72–81. [Google Scholar] [CrossRef]
- Wang, L.; Liu, H.; Wang, K.; Zhou, L.; Jiang, X.; Li, Y. Numerical simulation of the sound field of a five-stage centrifugal pump with different turbulence models. Water 2019, 11, 1777. [Google Scholar] [CrossRef]
- Yuanwen, L.; Zhiming, G.; Liu, S.; Xiaozhou, H. Flow field and particle flow of two-stage deep-sea lifting pump based on DEM-CFD. Front. Energy Res. 2022, 10, 884571. [Google Scholar] [CrossRef]
- Shao, W.; Zhao, R.; Zhang, D. Erosion of multistage mixed flow pump based on fully coupled CFD-DEM method. Chin. J. Hydrodyn. 2020, 35, 640–648. [Google Scholar]
- Cheng, W.; Fan, H.; Cheng, W.; Shao, C. Investigation on wear induced by solid-liquid two-phase flow in a centrifugal pump based on EDEM-Fluent coupling method. Flow Meas. Instrum. 2024, 96, 102542. [Google Scholar] [CrossRef]
- Su, X.; Tang, Z.; Li, Y.; Zhu, Z.; Mianowicz, K.; Balaz, P. Research of particle motion in a two-stage slurry transport pump for deep-ocean mining by the CFD-DEM method. Energies 2020, 13, 6711. [Google Scholar] [CrossRef]
- Hu, Q.; Chen, J.; Deng, L.; Kang, Y.; Liu, S. CFD-DEM simulation of backflow blockage of deep-sea multistage pump. J. Mar. Sci. Eng. 2021, 9, 987. [Google Scholar] [CrossRef]
- Hu, Q.; Zhu, J.; Deng, L.; Chen, J.; Wang, Y. Effect of Particle Factors on the Reflux and Blockage of a Deep-Sea Six-Stage Pump Based on CFD-DEM. Adv. Theory Simul. 2024, 7, 2300931. [Google Scholar] [CrossRef]
- Li, Y.; Liu, D.; Cui, B.; Lin, Z.; Zheng, Y.; Ishnazarov, O. Studying particle transport characteristics in centrifugal pumps under external vibration using CFD-DEM simulation. Ocean Eng. 2024, 301, 117538. [Google Scholar] [CrossRef]
- Chen, M.; Tan, L. Solid-liquid multiphase flow and erosion in the energy storage pump using modified drag model and erosion model. J. Energy Storage 2023, 73, 108859. [Google Scholar] [CrossRef]
- Wang, H.; Tan, Z.; Kuang, S.; Yu, A. Systematic investigation of centrifugal slurry pump under different operating condition by DDPM method. Powder Technol. 2023, 430, 119024. [Google Scholar] [CrossRef]
- Brucato, A.; Grisafi, F.; Montante, G. Particle drag coefficients in turbulent fluids. Chem. Eng. Sci. 1998, 53, 3295–3314. [Google Scholar] [CrossRef]
- Panneerselvam, R.; Savithri, S.; Surender, G.D. CFD modeling of gas–liquid–solid mechanically agitated contactor. Chem. Eng. Res. Des. 2008, 86, 1331–1344. [Google Scholar] [CrossRef]
- Lane, G.; Schwarz, M.; Evans, G.M. Numerical modelling of gas–liquid flow in stirred tanks. Chem. Eng. Sci. 2005, 60, 2203–2214. [Google Scholar] [CrossRef]
- Goossens, W.R. Review of the empirical correlations for the drag coefficient of rigid spheres. Powder Technol. 2019, 352, 350–359. [Google Scholar] [CrossRef]
- Peng, C.; Wang, L.-P. Mechanisms and models of particle drag enhancements in turbulent environments. J. Fluid Mech. 2023, 959, A30. [Google Scholar] [CrossRef]
- Zhang, Z. Investigation on Sediment Erosion Characteristics of Double Suction Centrifugal Pump; China Agricultural University: Beijing, China, 2016. [Google Scholar]
- Michaelides, E.E.; Sommerfeld, M.; van Wachem, B. Multiphase Flows with Droplets and Particles; CRC Press: Boca Raton, FL, USA, 2022. [Google Scholar]
- Brown, P.P.; Lawler, D.F. Sphere drag and settling velocity revisited. J. Environ. Eng. 2003, 129, 222–231. [Google Scholar] [CrossRef]
- Chen, M.; Tan, L. An improved method combined modified drag model and modified erosion model based on LES for solid-liquid multiphase flow and erosion with application in a 90° elbow. Wear 2024, 538, 205214. [Google Scholar] [CrossRef]
- Röhrig, R.; Jakirlić, S.; Tropea, C. Comparative computational study of turbulent flow in a 90 pipe elbow. Int. J. Heat Fluid Flow 2015, 55, 120–131. [Google Scholar] [CrossRef]
- Chung, J.S. An articulated pipe-miner system with thrust control for deep-ocean crust mining. Mar. Georesour. Geotechnol. 1998, 16, 253–271. [Google Scholar] [CrossRef]
- Xiao, L.; Fang, M.; Zhang, W. Advance and present state of the research in oceanic metalliferous nodule mining. Met. Mine 2000, 8, 11–14. [Google Scholar]
- Okamoto, N.; Shiokawa, S.; Kawano, S.; Yamaji, N.; Sakurai, H.; Kurihara, M. World’s first lifting test for seafloor massive sulphides in the Okinawa Trough in the EEZ of Japan. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019; p. ISOPE–I-19-655. [Google Scholar]
- Hong, S.; Kim, H.-W.; Choi, J.-S. A way to accomplish the mining technology for poly-metallic nodules. In Proceedings of the ISA Workshop on Polymetallic Nodule Mining Technology, Chennai, India, 18–22 February 2008. [Google Scholar]
- Yoon, C.H.; Park, J.-M.; Kang, J.S.; Kim, Y.; Park, Y.C.; Park, S.G.; Kim, C.; Kang, S.S.; Kim, S.B.; Kim, W.T. Shallow lifting test for the development of deep ocean mineral resources in Korea. In Proceedings of the ISOPE Ocean Mining and Gas Hydrates Symposium, Maui, HI, USA, 19–24 June 2011; p. ISOPE–M-11-014. [Google Scholar]
- Deepak, C.; Shajahan, M.; Atmanand, M.; Annamalai, K.; Jeyamani, R.; Ravindran, M.; Schulte, E.; Handschuh, R.; Panthel, J.; Grebe, H. Developmental tests on the underwater mining system using flexible riser concept. In Proceedings of the ISOPE Ocean Mining and Gas Hydrates Symposium, Stavanger, Norway, 17–22 June 2001; p. ISOPE–M-01-016. [Google Scholar]
- Deepak, C.; Ramji, S.; Ramesh, N.; Babu, S.; Abraham, R.; Shajahan, M.; Atmanand, M. Development and testing of underwater mining systems for long term operations using flexible riser concept. In Proceedings of the ISOPE Ocean Mining and Gas Hydrates Symposium, Lisbon, Portugal, 1–6 July 2007; p. ISOPE–M-07-025. [Google Scholar]
- Engelmann, H. Vertical Hydraulic Lifting of Large-Size Particles—A Contribution to Marine Mining. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 7–10 May 1978. [Google Scholar]
- Park, Y.-C.; Yoon, C.-H.; Lee, D.-K.; Kwon, S.-K. Experimental Studies on Hydraulic Lifting of Solid-liquid Two-phase Flow. Ocean Polar Res. 2004, 26, 647–653. [Google Scholar] [CrossRef]
- Yoon, C.; Lee, D.K.; Park, Y.C.; Kwon, S.K. Design and test of hydraulic pumping system with 30 m height scale. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Toulon, France, 23–28 May 2004; pp. 61–65. [Google Scholar]
- Chi-Ho Yoon, Y.-C.P.Y.-J.K.J.-M.P.; Seok-ki, K. A Study on Flow Analysis of Lifting Pump and Flexible Hose for Sea-Test. J. Korean Soc. Miner. Energy Resour. Eng. 2007, 44, 308–313. [Google Scholar]
- Hinsch, K. Particle image velocimetry. In Speckle Metrology; CRC Press: Boca Raton, FL, USA, 2020; pp. 235–324. [Google Scholar]
- Li, W.; Zhou, L.; Shi, W.-D.; Ji, L.; Yang, Y.; Zhao, X. PIV experiment of the unsteady flow field in mixed-flow pump under part loading condition. Exp. Therm. Fluid Sci. 2017, 83, 191–199. [Google Scholar] [CrossRef]
- Li, W.; Ji, L.; Shi, W.; Li, E.; Yang, Z. Particle image velocimetry measurement of flow fields in a mixed-flow pump with non-uniform tip clearance. J. Vis. 2021, 24, 29–45. [Google Scholar] [CrossRef]
- Keller, J.; Blanco, E.; Barrio, R.; Parrondo, J. PIV measurements of the unsteady flow structures in a volute centrifugal pump at a high flow rate. Exp. Fluids 2014, 55, 1820. [Google Scholar] [CrossRef]
- Li, X.; Chen, B.; Luo, X.; Zhu, Z. Effects of flow pattern on hydraulic performance and energy conversion characterisation in a centrifugal pump. Renew. Energy 2020, 151, 475–487. [Google Scholar] [CrossRef]
- Keller, J. Fluid-Dynamic Fluctuations and Flow Structures in Centrifugal Pumps due to Rotor-Stator Interaction. Ph.D. Thesis, Universidad de Oviedo, Oviedo, Spain, 2014. [Google Scholar]
- Cubas, J.M.; Stel, H.; Ofuchi, E.M.; Neto, M.A.M.; Morales, R.E. Visualization of two-phase gas-liquid flow in a radial centrifugal pump with a vaned diffuser. J. Pet. Sci. Eng. 2020, 187, 106848. [Google Scholar] [CrossRef]
- Estevam, V. A Phenomenological Analysis about Centrifugal Pump in Two-Phase Flow Operation. Ph.D. Thesis, Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas, São Paulo, Brazil, 2002. [Google Scholar]
- Zhang, J.; Cai, S.; Li, Y.; Zhu, H.; Zhang, Y. Visualization study of gas–liquid two-phase flow patterns inside a three-stage rotodynamic multiphase pump. Exp. Therm. Fluid Sci. 2016, 70, 125–138. [Google Scholar] [CrossRef]
- Tan, M.; Wang, X.; Wu, X.; Liu, H.; Lian, Y. Single particle motion visualization test of solid-liquid two-phase flow in a double-blade pump. J. Harbin Eng. Univ. 2020, 41, 676–683. [Google Scholar]
- Schäfer, T.; Neumann, M.; Bieberle, A.; Hampel, U. Experimental investigations on a common centrifugal pump operating under gas entrainment conditions. Nucl. Eng. Des. 2017, 316, 1–8. [Google Scholar] [CrossRef]
- Schäfer, T.; Neumann-Kipping, M.; Bieberle, A.; Bieberle, M.; Hampel, U. Ultrafast X-ray computed tomography imaging for hydrodynamic investigations of gas–liquid two-phase flow in centrifugal pumps. J. Fluids Eng. 2020, 142, 041502. [Google Scholar] [CrossRef]
- Sharma, S.; Gandhi, B.K.; Pandey, L. Measurement and analysis of sediment erosion of a high head Francis turbine: A field study of Bhilangana-III hydropower plant, India. Eng. Fail. Anal. 2021, 122, 105249. [Google Scholar] [CrossRef]
- Tarodiya, R.; Gandhi, B.K. Numerical investigation of erosive wear of a centrifugal slurry pump due to solid–liquid flow. J. Tribol. 2021, 143, 101702. [Google Scholar] [CrossRef]
- Zhu, H.; Zhu, J.; Rutter, R.; Zhang, H.-Q. Experimental Study on Deteriorated Performance, Vibration, and Geometry Changes of an Electrical Submersible Pump Under Sand Water Flow Condition. J. Energy Resour. Technol. 2021, 143, 082104. [Google Scholar] [CrossRef]
- Hong, S.; Hu, X. Study on the Non-Steady-State Wear Characteristics and Test of the Flow Passage Components of Deep-Sea Mining Pumps. Appl. Sci. 2022, 12, 782. [Google Scholar] [CrossRef]
- Sharma, S.; Gandhi, B.K. Experimental investigation on rotating domain wear of hydrodynamic machine due to particulate flow. Powder Technol. 2022, 410, 117884. [Google Scholar] [CrossRef]






| Parameter | Equation |
|---|---|
| Impeller inlet diameter | |
| Impeller blade outlet width | |
| Impeller outlet diameter | |
| Number of impeller blades | |
| The width of diffuser blades | |
| Number of diffuser blades |
| Authors | Optimization Algorithm | Pump Type | Efficiency Optimization | Head Optimization |
|---|---|---|---|---|
| Pei et al. [47] | Improved particle swarm optimization | Centrifugal pump | - | - |
| Gong et al. [48] | Improved bat algorithm | Seawater desalination high pressure multistage pump | +3.98% | - |
| Lu et al. [49] | Radial basis function (RBF) neural network multi-islands genetic algorithm (MIGA) | Mixed-flow pump | +4.3% | - |
| Derakhshan et al. [50] | Artificial colony algorithm | Centrifugal pump | +3.59% | +6.89 m |
| Wu et al. [51,52] | Artificial neural network Genetic algorithm | Multistage centrifugal pump | +2.8%, (CMEI decreases by 1.34%) | +8.8% |
| Normal Contact Force | Equation |
|---|---|
| Linear spring–dashpot model [114] | |
| Hysteretic linear spring model [115] | |
| Hertzian spring–dashpot model [116] |
| References | Correlations |
|---|---|
| Haider and Levenspiel [127] | |
| Ganser [128] | |
| Leith [129] | |
| Tran-Cong et al. [130] | |
| Hölzer and Sommerfeld [131] |
| References | Correlations | Notes |
|---|---|---|
| Sanjeevi et al. [132] | For spherocylinder and ellipsoid Valid when 0.1 ≤ Rep ≤ 2000 | |
| Zastawny et al. [124] | For spherocylinder and ellipsoid Valid when 0.1 ≤ Rep ≤ 300 | |
| Cao and Tafti [133] | For cylinder with w = 0.25 Valid when 10 ≤ Rep ≤ 300 | |
| Richter and Nikrityuk [134] | For ellipsoid with w = 2 Valid when 10 ≤ Rep ≤ 200 |
| Consortium | KCON (Kennecott Consortium) | OMA (Ocean Mining Association) | OMI (Ocean Management Incorporated) | OMCO (Ocean Mineral Company) |
|---|---|---|---|---|
| Established | 1974 | 1974 | 1975 | 1977 |
| Mining | 1975–1976; collector model test at depth of 5000 m (Shaw [9]) | 1970; mining system test at the depth of 800 m | 1976; collector test in deep sea | 1978; mining system test in shallower water |
| Test | 1978; lift up test on-land | 1978; mining pilot test in the DOMES site C (4400 m) and lift up 500 t nodules | 1978; pilot miner test in the DOMES A(5000–5200 m) and lift up 500 t nodules (Chung [163]) | 1979; mining system test in deep sea (Xiao [164]) |
| Target | Ni, Co, Cu | Ni, Cu, Co, Mn | Ni, Cu, Co | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, L.; He, X.; Li, W.; Tian, F.; Shi, W.; Zhou, L.; Liu, Z.; Yang, Y.; Xiao, C.; Agarwal, R. Research Progress of Advanced Design Method, Numerical Simulation, and Experimental Technology of Pumps in Deep-Sea Resource Exploitation. Water 2024, 16, 1881. https://doi.org/10.3390/w16131881
Ji L, He X, Li W, Tian F, Shi W, Zhou L, Liu Z, Yang Y, Xiao C, Agarwal R. Research Progress of Advanced Design Method, Numerical Simulation, and Experimental Technology of Pumps in Deep-Sea Resource Exploitation. Water. 2024; 16(13):1881. https://doi.org/10.3390/w16131881
Chicago/Turabian StyleJi, Leilei, Xinrui He, Wei Li, Fei Tian, Weidong Shi, Ling Zhou, Zhenbo Liu, Yang Yang, Cui Xiao, and Ramesh Agarwal. 2024. "Research Progress of Advanced Design Method, Numerical Simulation, and Experimental Technology of Pumps in Deep-Sea Resource Exploitation" Water 16, no. 13: 1881. https://doi.org/10.3390/w16131881
APA StyleJi, L., He, X., Li, W., Tian, F., Shi, W., Zhou, L., Liu, Z., Yang, Y., Xiao, C., & Agarwal, R. (2024). Research Progress of Advanced Design Method, Numerical Simulation, and Experimental Technology of Pumps in Deep-Sea Resource Exploitation. Water, 16(13), 1881. https://doi.org/10.3390/w16131881