Abstract
This article explains how discrete symmetry groups can be directly applied to obtain the particular solutions of nonlinear ordinary differential equations (ODEs). The particular solutions of some nonlinear ordinary differential equations have been generated by means of their discrete symmetry groups.
1. Introduction
Lie group analysis, founded by Sophus Lie, is an influential technique to solve differential equations, specially for the solutions of nonlinear differential equations. This method is basically based upon the invariance of differential equations under a group of continuous transformations. These transformations are called Lie point symmetry groups of a differential equation when this group of transformations leave the differential equation invariant [1,2,3,4,5]. Lie developed an algorithm to determine the symmetry groups associated with a given differential equation in a systematic way [2,5,6]. Once the symmetry group of a differential equation is discovered, it can be used to investigate the solutions of this differential equation in various ways. For example, the symmetry groups can be used (a) to develop new solutions from old ones [4,7], (b) to decrease the order of the given differential equation [1,7], (c) to decide whether a differential equation can be linearized and to build an explicit linearization if it exists [8,9,10] and (d) to find conserved quantities [7]. The Lie point symmetries of differential equations can be described by very small generators.
Symmetries which cannot be described by very small generators exist and one of them are discrete symmetries [1,11]. Discrete symmetries have many applications in differential equations like to make simple the numerical computation of solutions of partial differential equations and to generate new exact solutions from the known solutions [12]. Discrete symmetry groups also determine the nature of bifurcations in nonlinear dynamical systems [13].
Hydon developed a technique [1] to find all discrete point symmetries of the differential equations based on the result [11] that every Lie point symmetry generator of a Lie algebra of a differential equation induces an automorphism that preserves the commutator relation
His method classifies all possible automorphisms of the Lie algebra , factoring out those automorphisms that are equivalent under the action of the continuous symmetry in the Lie group generated by the Lie algebra and give the most general realization of these automorphisms as point transformations. Finally, these point transformations are used to obtain the complete list of the discrete point symmetries of a differential equation.
The solutions of nonlinear ordinary differential equations are of great interest for physicists, engineers, mathematicians and biologists because many physical phenomena are modeled in the form of nonlinear ordinary differential equations e.g., The Legendre differential equation [14], that is used in Physics. Many techniques e.g., Laplace transformation [15], integral transform methods [16], Sumudu transform [17] and Lie group method [5], exist in the literature to solve nonlinear ODEs. Among these methods, the Lie group method is a more powerful method to obtain the solutions of nonlinear ordinary differential equations.
The Lie group of symmetry transformations of a nonlinear ordinary differential equations is used to find its general solutions by converting it into a linearaizable form, by finding its invariants, or by getting new solutions from the old solutions, but a discrete symmetry group of transformations can be directly used to generate the particular solutions of the nonlinear ordinary differential equations. In this paper, we explain how discrete symmetry groups are used to obtain the particular solutions of ordinary differential equations. This paper is divided into three sections as follows: In Section 2, an algorithm to find the discrete symmetries of an ODE is described. In Section 3, the procedure to find the particular solutions of the ordinary differential equations using discrete symmetry groups is discussed and particular solutions of some nonlinear ODEs are obtained by using their discrete symmetries. A summary of the present work is given in the last section.
2. Method to Find the Discrete Point Symmetries of an ODE
An nth order ODE of the form
has a finite dimensional Lie algebra of point symmetry generators (if it exists) with basis
where dim(. Hydon [18] proposed a method to find a complete list of all discrete symmetry groups for a given ordinary differential Equation with a Lie algebra of the symmetry generators given by . Each symmetry generator brings an automorphism of of the basis generator , preserving the following relation
where are the structure constants for the basis
The method developed by Hydon classifies all conceivable automorphisms of , factoring out those which are equivalent under the action of any symmetry in Lie group generated by Then it will be possible to attain the most general realization of the inequivalent automorphism as a point transformation. Finally, replacing these point transformations into the symmetry condition
one can get a complete list of discrete symmetry groups of the ODE . The detailed aspect of this method can be seen in [18].
Example:
Consider a third order ODE, which was obtained by Whittaker [19]
whose Lie algebra [20] is generated by
This Lie algebra is non-abelian and its only nonzero structure constant is
The elements of the non-singular matrix B satisfy the following system of nonlinear constraints
For , the above constraints become
From above equation, only one value by setting , is obtained i.e.,
Similarly for in , it is found that
For , the constraints give the following values of the elements of
Now the non-singular matrix B becomes
As is in the center of the Lie algebra , so the matrices corresponding to the automorphisms generated by and are
For further simplification of B, premultiply it by to replace by zero and premultiply B by to replace by Thus B takes the following form
Now following determining equations have to be solved
The general solution of above determining equations is
where c is the constant of integration and determining equations require that
From , it is obtained that
Putting above results into the symmetry condition it has been found that
and
are discrete symmetries of . Thus the only non-trivial discrete symmetry group of is generated by
which is isomorphic to .
3. Application of Discrete Symmetry Groups for Obtaining Particular Solutions of Nonlinear ODEs
In this section, the procedure to find particular solutions of nonlinear ordinary differential equations, by considering some examples, is explained.
3.1. Procedure to Find Particular Solutions Using Discrete Symmetry Groups
Let an nth order ODE given by has the following discrete symmetry group
The discrete symmetry group indicates that either
or
can be a particular solution of ODE . By using Equations and , the particular solutions of nonlinear ODEs via discrete symmetry groups, can be construct.
3.2. Particular Solutions of Some Nonlinear ODEs Using Discrete Symmetry Groups
Now particular solutions of some ordinary differential equations by using their discrete symmetry groups, are presented.
- A third order nonlinear ODE, obtained by Whittaker [19]has the discrete symmetry group given in . This discrete symmetry group indicates that the particular solution of ODE can be of the formIf we take then it is observed that or is the particular solution of . The graph of particular solution of is shown in Figure 1.
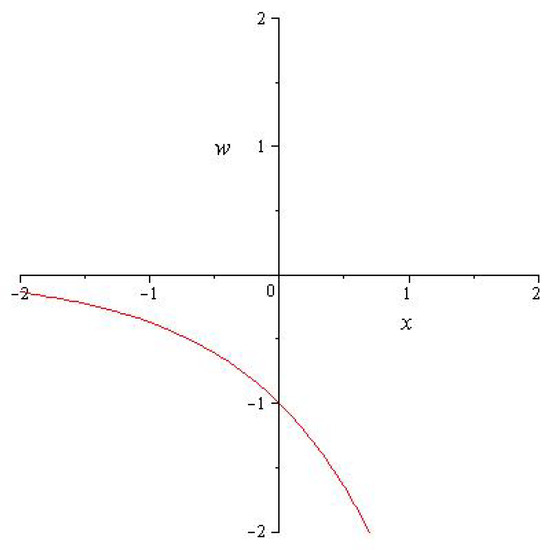 Figure 1. Graph for particular solution of .
Figure 1. Graph for particular solution of . - Consider the Blasius equationwhich is invariant by two dimensional Lie algebraFollowing the method presented in [18], it is found that the discrete symmetry group of is , which shows that i.e., is the particular solution of . The graph of particular solution of is presented in Figure 2.
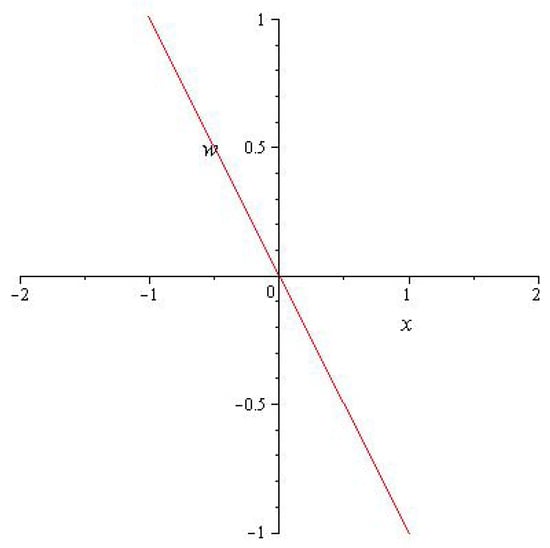 Figure 2. Graph for particular solution of .
Figure 2. Graph for particular solution of . - Consider the following ODEwhich has a six dimensional Lie algebra [20]Using above Lie algebra and applying Hydon’s method given in [18], it is found thatare two discrete symmetry groups of ODE . Now using and , two particular solutions of can be found. From and , it has been deduced that and are two particular solutions of which are calculated by using its discrete symmetry groups. The graph of particular solution of is shown in Figure 3.
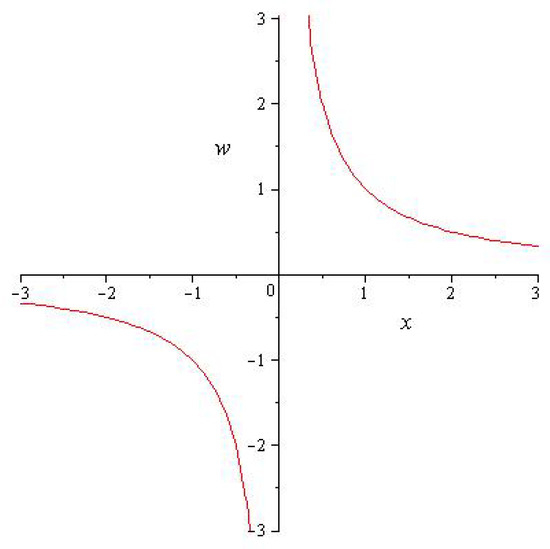 Figure 3. Graph for particular solution of .
Figure 3. Graph for particular solution of . - The discrete symmetry group of nonlinear ODE [21]isNow using , deduce that or is a particular solution of The graph of particular solution of is presented in Figure 4.
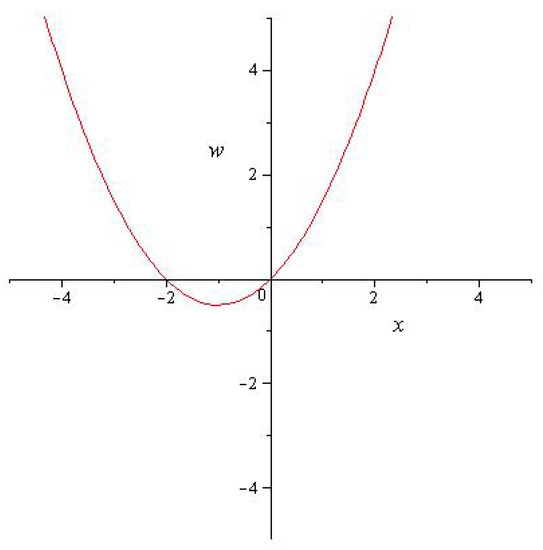 Figure 4. Graph for particular solution of .
Figure 4. Graph for particular solution of . - Consider the following Chazy equationwhose discrete symmetries have been discussed in [18] and one of these discrete symmetry transformations iswhich indicates that the solution of is of the fromorTo seek the particular solution of , the value of has to be found. So the derivatives, , and by using Equation are obtained and by putting values of these derivatives in Equation , it is obtained that . Thus i.e., is the particular solution of . The graph of this particular solution is shown in Figure 5.
 Figure 5. Graph for particular solution of .
Figure 5. Graph for particular solution of .
Remark:
All considered examples presented in the above section exemplify, how discrete symmetry groups are helpful to construct some particular solutions of nonlinear ordinary differential equations.
4. Summary
This article contains the application of the discrete point symmetries for ordinary differential equations. In this article, we have explained how discrete symmetry groups can be used to find particular solutions of nonlinear ordinary differential equations. Some nonlinear ODEs along their discrete symmetry transformations have been considered and particular solutions of these onlinear ODEs have been obtained by means of their discrete symmetries.
Further application of the discrete symmetry groups that has to be investigated is to explore wheather and how nonlinear ODEs can be inearized with the help of discrete symmetry groups.
Funding
This research is funded by NUST, Pakistan.
Acknowledgments
The author would like thanks to the editor and anonymous referees for their suggestions and valuable comments that improved the manuscript.
Conflicts of Interest
The author declares no conflict of interest.
References
- Hydon, P.E. Symmetry Methods for Differential Equations: A Beginner’s Guide; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Stephani, H. Differential Equations: Their Solutions Using Symmetries; Cambridge University Press: Cambridge, UK, 1989. [Google Scholar]
- Ibragimov, N.H. CRC Handbook of Lie Group Analysis of Differential Equations; CRC Press: Boca Raton, FL, USA, 1996; Volume III. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetries and Differential Equations; Springer: New York, NY, USA, 1989. [Google Scholar]
- Ibragimov, N.H. Elementary Lie Group Analysis and Ordinary Differential Equations; John Wiley & Sons: Chichester, UK, 1999. [Google Scholar]
- Olver, P.J. Equivalnce, Invariants and Symmetry; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer: New York, NY, USA, 1986. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetry based algorithms related to partial differential equations: I. Local symmetries. Eur. J. Appl. Math. 1990, 1, 189–216. [Google Scholar] [CrossRef]
- Kumei, S.; Bluman, G.W. When nonlinear differential equations are equivalent to linear differential equations. SIAM J. Appl. Math. 1982, 42, 1157–1173. [Google Scholar] [CrossRef]
- Mahomed, F.M.; Leach, P.G.L. The Lie algebra sl(3,R) and linearization. Quaest. Math. 1989, 12, 121–139. [Google Scholar] [CrossRef]
- Hydon, P.E. How to Use Lie Symmetries to Find Discrete Symmetries; MARS Publishers: Trondheim, Norway, 1999; pp. 141–147. [Google Scholar]
- Yang, H.; Shi, Y.; Yin, B.; Dong, H. Discrete Symmetries Analysis and Exact Solutions of the Inviscid Burgers Equation. Discret. Dyn. Nat. Soc. 2012, 2012, 908975. [Google Scholar] [CrossRef]
- Golubitsky, M.; Stewart, I.; Schaeffer, D.G. Singularities and Groups in Bifurcation Theory; Springer: New York, NY, USA, 1988; Volume II. [Google Scholar]
- Arfken, G. Self-Adjoint Differential Equations. Mathematical Methods for Physicists, 3rd ed.; Academic Press: Orlando, FL, USA, 1985; pp. 497–509. [Google Scholar]
- Spiegel, M.R. Theory and Problems of Laplace Transforms; Schaums Outline Series; McGraw-Hill: New York, NY, USA, 1965. [Google Scholar]
- Tarig, M. Elzaki, the New Integral Transform ”Elzaki” Transform. Glob. J. Pure Appl. Math. 2011, 7, 57–64. [Google Scholar]
- Belgacem, F.B.M.; Karaballi, A.A. Sumudu transform fundamental properties, investigations and applications. J. Appl. Math. Stoch. Anal. 2006, 2006, 91083. [Google Scholar] [CrossRef]
- Hydon, P.E. Discrete point symmetries of ordinary differential equations. Proc. R. Soc. Lond. Ser. A 1998, 454, 1961–1972. [Google Scholar] [CrossRef]
- Whittaker, J.V. An analytical description of some simple cases of chaotic behaviour. Am. Math. Mon. 1991, 98, 489–504. [Google Scholar] [CrossRef]
- Ibragimov, N.H.; Nucci, M.C. Integration of third-order ordinary differential equations by lie’s method: Equations admitting three-dimensional lie algebras. Lie Groups Their Appl. 1994, 1, 49–64. [Google Scholar]
- Laine-Pearson, F.E.; Hydon, P.E. Classification of discrete symmetries of ordinary differential equations. Stud. Appl. Math. 2003, 111, 269–299. [Google Scholar] [CrossRef]





© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).