
New Self-Adaptive Inertial-like Proximal Point Methods for the Split Common Null Point Problem


Abstract
:1. Introduction
- Fact 1:
- The resolvent is not only always single-valued but also firmly monotone:
- Fact 2:
- Using the resolvent operator, the problem (1) and (2) can be written as a fixed point problem:
- Question 1.1
- Can we construct the iterate for SCNPP whose step size does not depend on the norm of the linear operator T?
- Question 1.2
- Can condition (5) be removed from the inertial method and still ensure the convergence of the sequence? Namely, can we construct a new inertial algorithm to solve SCNPP (1) and (2) without prior computation of the norm of the difference between and ?
2. Preliminaries
- (i)
- h is called Lipschitz with constant if for all .
- (ii)
- h is called nonexpansive if for all .
- (1)
- ;
- (2)
- or ;
- (3)
- .
- (i)
- exists for every ,
- (ii)
- .
3. Main Results
3.1. Variant of Discretization
3.2. Some Assumptions
3.3. Inertial-like Proximal Point Algorithms
| Algorithm 1 Self adaptive inertial-like algorithm |
|
3.4. Convergence Analysis of Algorithms
- (I).
- First, we consider the case of , .
- (II).
- Secondly, we consider the case of . In this case, . Similar to the proof of (15), we have thatand then
- (III).
- Finally, we consider the case of . Indeed, we just need to replace with in the proof of (II) and then the desired result is obtained. □
| Algorithm 2 Update of self adaptive inertial-like algorithm |
|
- (I).
- We first consider the strong convergence under the situation of and .
- (II).
- Now, we consider the case of . In this case, we have and . Denote by , similar to the proof of (24)–(26), we obtain that the sequence is bounded andwhich implies that
- (III.)
- Finally, we consider the case of . Indeed, we just need to replace with in the proof of (II), and then the desired result is obtained. □
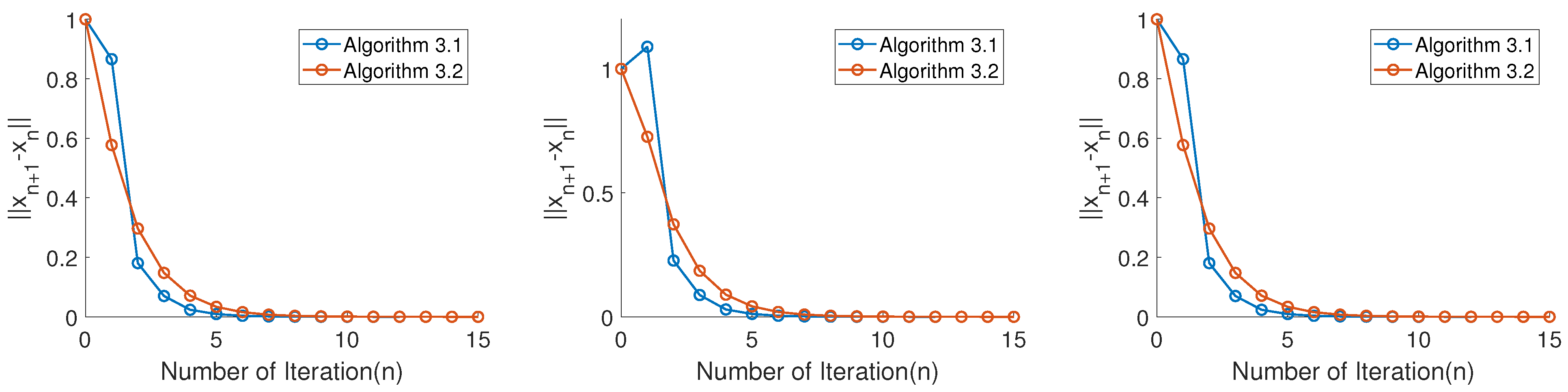
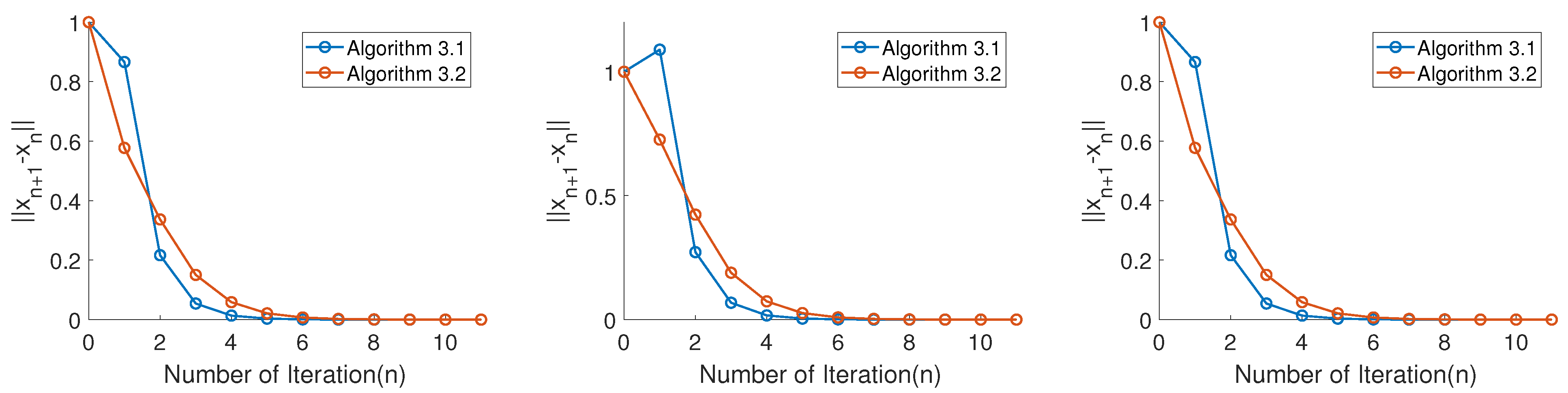
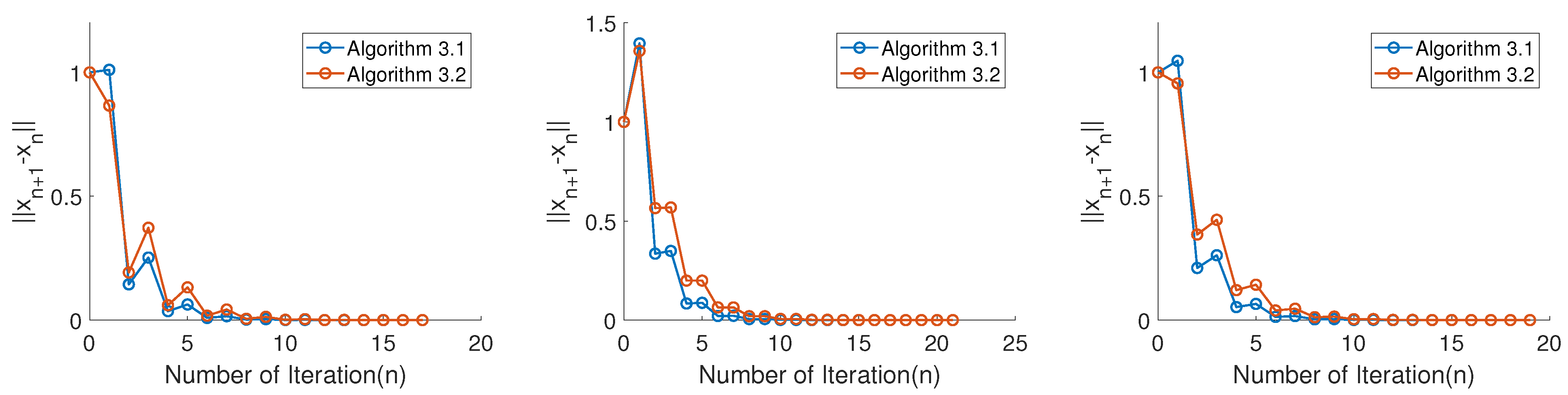
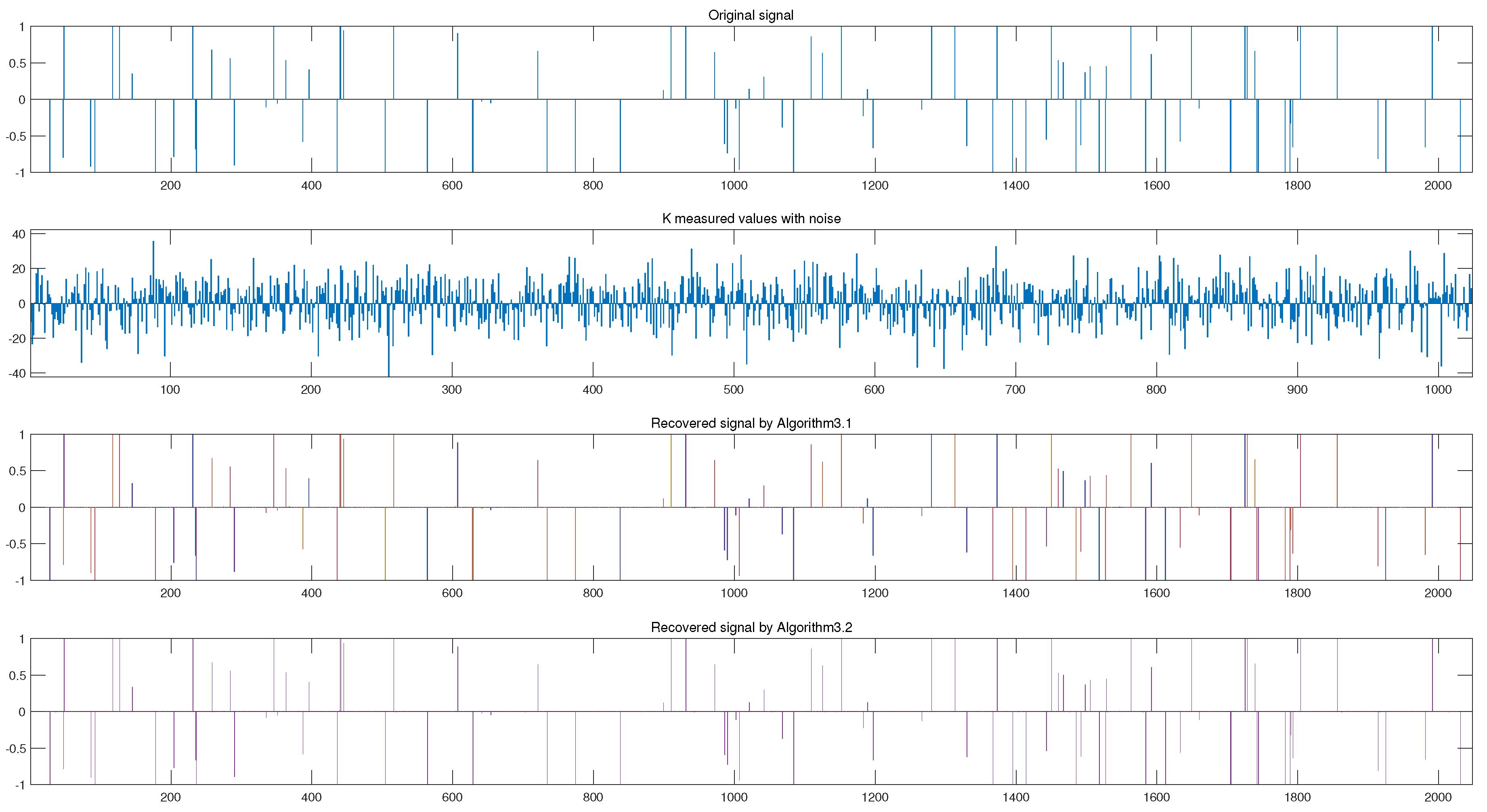
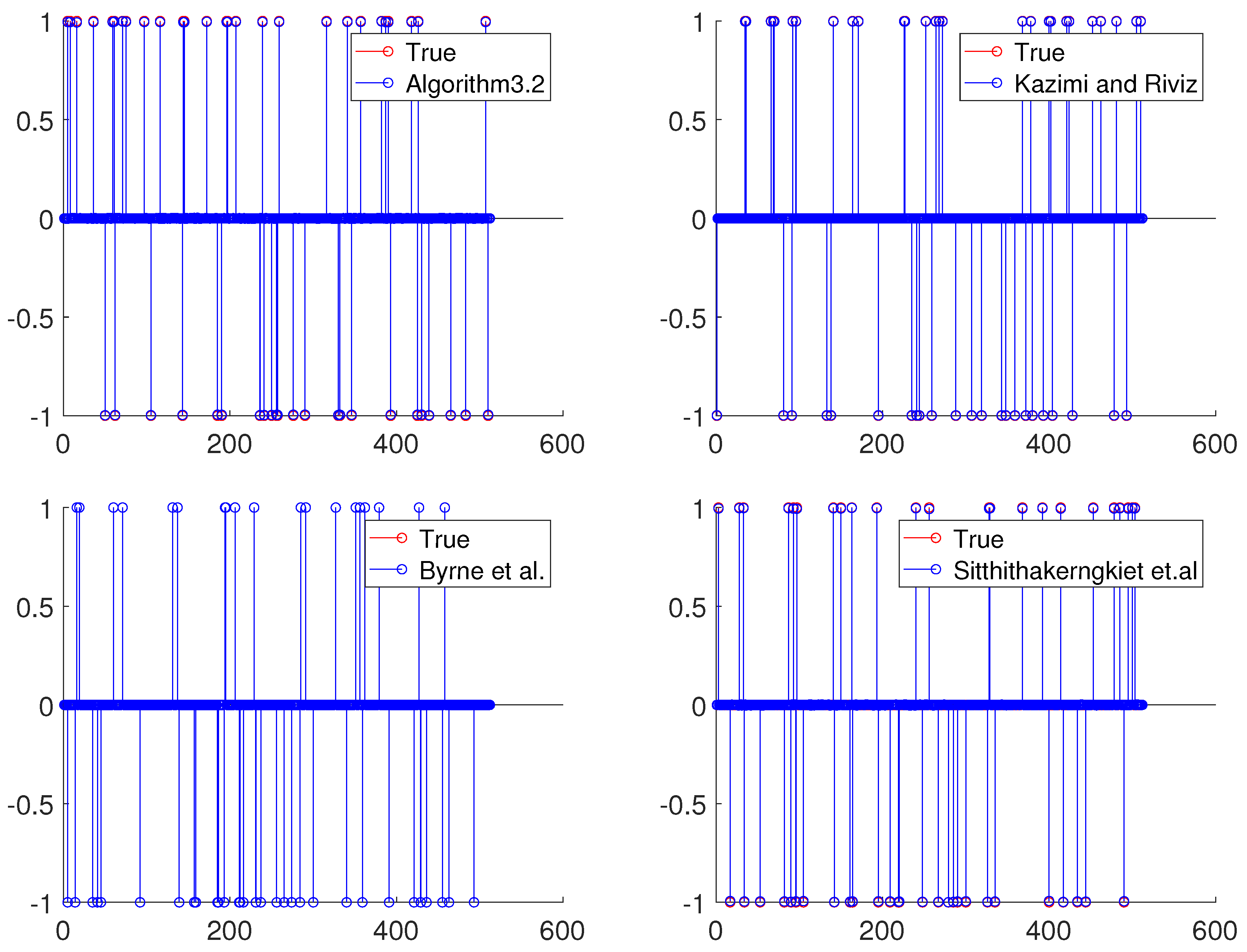
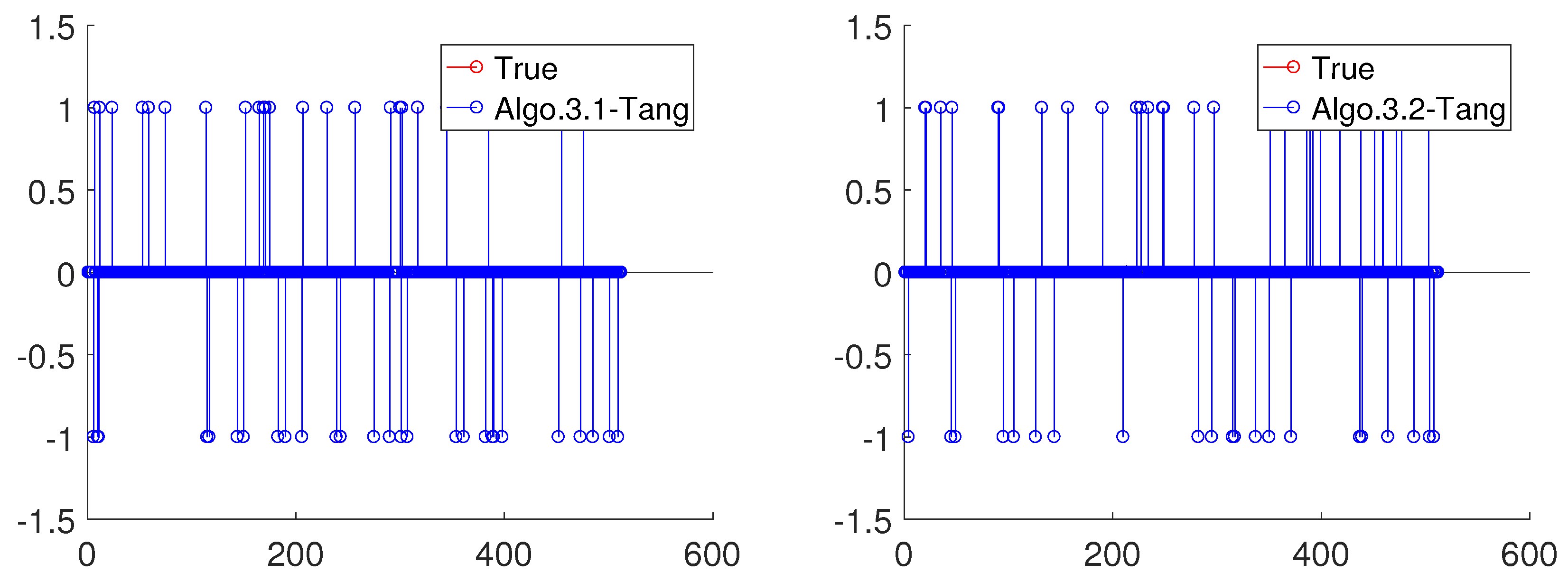
4. Numerical Examples and Experiments
- Case I:
- ;
- Case II:
- ;
- Case III:
- .
5. Conclusions
- (1)
- Different from the average inertia technique, the convergence of the proposed algorithms remain even if without the term below:They do not need to calculate the values of in advance if one chooses the coefficients , which means that the algorithms are easy to use.
- (2)
- The inertial factors can be chosen in , which means that is a possible equivalent to 1 and opens a wider path for parameter selection.
- (3)
- The step sizes of our inertial proximal algorithms are self-adaptive and are independent of the cocoercive coefficients, which means that they do not use any prior knowledge of the operator norms.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Censor, Y.; Elfving, T. A multiprojection algorithm using Bregman projections in product space. Numer. Algorithms 1994, 8, 221–239. [Google Scholar] [CrossRef]
- Moudafi, A. Split monotone variational inclusions. J. Optim. Theory Appl. 2011, 150, 275–283. [Google Scholar] [CrossRef]
- Byrne, C. Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 2002, 18, 441–453. [Google Scholar] [CrossRef]
- Moudafi, A.; Thakur, B.S. Solving proximal split feasibilty problem without prior knowledge of matrix norms. Optim. Lett. 2013, 8. [Google Scholar] [CrossRef] [Green Version]
- Byrne, C.; Censor, Y.; Gibali, A.; Reich, S. Weak and strong convergence of algorithms for the split common null point problem. J. Nonlinear Convex Anal. 2012, 13, 759–775. [Google Scholar]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Alvarez, F. Weak convergence of a relaxed and inertial hybrid projection-proximal point algorithm for maximal monotone operators in Hilbert spaces. SIAM J. Optim. 2004, 14, 773–782. [Google Scholar] [CrossRef]
- Attouch, H.; Chbani, Z. Fast inertial dynamics and FISTA algorithms in convex optimization, perturbation aspects. arXiv 2016, arXiv:1507.01367. [Google Scholar]
- Attouch, H.; Chbani, Z.; Peypouquet, J.; Redont, P. Fast convergence of inertial dynamics and algorithms with asymptotic vanishing viscosity. Math. Program. 2018, 168, 123–175. [Google Scholar] [CrossRef]
- Attouch, H.; Peypouquet, J.; Redont, P. A dynamical approach to an inertial forward-backward algorithm for convex minimization. SIAM J. Optim. 2014, 24, 232–256. [Google Scholar] [CrossRef]
- Akgül, A. A novel method for a fractional derivative with non-local and non-singular kernel. Chaos Solitons Fractals 2018, 114, 478–482. [Google Scholar]
- Hasan, P.; Sulaiman, N.A.; Soleymani, F.; Akgül, A. The existence and uniqueness of solution for linear system of mixed Volterra-Fredholm integral equations in Banach space. AIMS Math. 2020, 5, 226–235. [Google Scholar] [CrossRef]
- Khdhr, F.W.; Soleymani, F.; Saeed, R.K.; Akgül, A. An optimized Steffensen-type iterative method with memory associated with annuity calculation. Eur. Phys. J. Plus 2019, 134, 146. [Google Scholar] [CrossRef]
- Ochs, P.; Chen, Y.; Brox, T.; Pock, T. iPiano: Inertial proximal algorithm for non-convex optimization. SIAM J. Imaging Sci. 2014, 7, 1388–1419. [Google Scholar] [CrossRef]
- Ochs, P.; Brox, T.; Pock, T. iPiasco: Inertial proximal algorithm for strongly convex optimization. J. Math. Imaging Vis. 2015, 53, 171–181. [Google Scholar] [CrossRef]
- Dang, Y.; Sun, J.; Xu, H.K. Inertial accelerated algorithms for solving a split feasibility problem. J. Ind. Manag. Optim. 2017, 13, 1383–1394. [Google Scholar] [CrossRef] [Green Version]
- Soleymani, F.; Akgül, A. European option valuation under the Bates PIDE in finance: A numerical implementation of the Gaussian scheme. Discret. Contin. Dyn. Syst.-S 2018, 13, 889–909. [Google Scholar] [CrossRef] [Green Version]
- Suantai, S.; Srisap, K.; Naprang, N.; Mamat, M.; Yundon, V.; Cholamjiak, P. Convergence theorems for finding the split common null point in Banach spaces. Appl. Gen. Topol. 2017, 18, 3345–3360. [Google Scholar] [CrossRef] [Green Version]
- Suantai, S.; Pholasa, N.; Cholamjiak, P. The modified inertial relaxed CQ algorithm for solving the split feasibility problems. J. Ind. Manag. Optim. 2017, 14, 1595. [Google Scholar] [CrossRef] [Green Version]
- Dong, Q.L.; Cho, Y.J.; Zhong, L.L.; Rassias, T.M. Inertial projection and contraction algorithms for variational inequalities. J. Glob. Optim. 2018, 70, 687–704. [Google Scholar] [CrossRef]
- Sitthithakerngkiet, K.; Deepho, J.; Martinez-Moreno, J.; Kumam, P. Convergence analysis of a general iterative algorithm for finding a common solution of split variational inclusion and optimization problems. Numer Algorithms 2018, 79, 801–824. [Google Scholar] [CrossRef]
- Kazmi, K.R.; Rizvi, S.H. An iterative method for split variational inclusion problem and fixed point problem for a nonexpansive mapping. Optim. Lett. 2014, 8, 1113–1124. [Google Scholar] [CrossRef]
- Promluang, K.; Kumam, P. Viscosity approximation method for split common null point problems between Banach spaces and Hilbert spaces. J. Inform. Math. Sci. 2017, 9, 27–44. [Google Scholar]
- Ealamian, M.; Zamani, G.; Raeisi, M. Split common null point and common fixed point problems between Banach spaces and Hilbert spaces. Mediterr. J. Math. 2017, 14, 119. [Google Scholar] [CrossRef]
- Aoyama, K.; Kohsaka, F.; Takahashi, W. Three generalizations of firmly nonexpansive mappings: Their relations and continuity properties. J. Nonlinear Convex Anal. 2009, 10, 131–147. [Google Scholar]
- Xu, H.K. Iterative algorithms for nonliear operators. J. Lond. Math. Soc. 2002, 66, 240–256. [Google Scholar] [CrossRef]
- Maingé, P.E. Approximation methods for common fixed points of nonexpansive mappings in Hilbert spaces. J. Math. Anal. Appl. 2007, 325, 469–479. [Google Scholar] [CrossRef] [Green Version]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpansivemappings. Bull. Am. Math. Soc. 1967, 73, 591–597. [Google Scholar] [CrossRef] [Green Version]
- Maingé, P.E. Strong convergence of projected subgradient methods for nonsmooth and nonstrictly convex minimization. Set-Valued Anal. 2008, 16, 899–912. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. Algorithms for the split variational inequality problem. Numer. Algorithms 2012, 59, 301–323. [Google Scholar] [CrossRef]
- Nguyen, T.L.N.; Shin, Y. Deterministic sensing matrices in compressive sensing: A survey. Sci. World J. 2013, 2013, 192795. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gibali, A.; Liu, L.W.; Tang, Y.C. Note on the modified relaxation CQ algorithm for the split feasibility problem. Optim. Lett. 2018, 12, 817–830. [Google Scholar] [CrossRef]
- Moudafi, A.; Gibali, A. l1 − l2 Regularization of split feasibility problems. Numer. Algorithms 2018, 78, 739–757. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y. New inertial algorithm for solving split common null point problem in Banach spaces. J. Inequal. Appl. 2019, 2019, 17. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Case I | Case II | Case III | |
|---|---|---|---|---|
| (sec.)/(n) | (sec.)/(n) | (sec.)/(n) | ||
| Algorithm 1 | 4.26/16 | 4.75/18 | 4.78/18 | |
| Algorithm 2 | 4.80/18 | 9.35/20 | 1.67/22 | |
| Algorithm 1 | 4.19/12 | 4.96/12 | 4.27/12 | |
| Algorithm 2 | 4.23/16 | 16.37/18 | 10.69/18 | |
| /(n) | Algorithm 1 | 2.56/10 | 2.63/10 | 2.60/10 |
| Algorithm 2 | 3.17/12 | 3.25/12 | 3.25/12 |
| DOL | Method | Iter (n) | CPU Time (s) |
|---|---|---|---|
| Algorithm 1 | 3 | 0.019 | |
| Algorithm 2 | 65 | 0.19 | |
| Algorithm 3.1-Tang [34] | 3 | 0.14 | |
| Algorithm 3.2-Tang [34] | 35 | 2.26 | |
| Sitthithakerngkiet [21] | 78 | 0.12 | |
| Byrne et al. [5] | 2 | 0.01 | |
| Kazimi and Riviz [22] | 48 | 0.08 | |
| Algorithm 1 | 3 | 0.017 | |
| Algorithm 2 | 102 | 0.24 | |
| Algorithm 3.1-Tang [34] | 8 | 2.37 | |
| Algorithm 3.2-Tang [34] | 76 | 2.78 | |
| Sitthithakerngkiet [21] | 1272 | 3.03 | |
| Byrne et al. [5] | 3 | 0.013 | |
| Kazimi and Riviz [22] | 503 | 0.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Zhang, Y.; Gibali, A. New Self-Adaptive Inertial-like Proximal Point Methods for the Split Common Null Point Problem. Symmetry 2021, 13, 2316. https://doi.org/10.3390/sym13122316
Tang Y, Zhang Y, Gibali A. New Self-Adaptive Inertial-like Proximal Point Methods for the Split Common Null Point Problem. Symmetry. 2021; 13(12):2316. https://doi.org/10.3390/sym13122316
Chicago/Turabian StyleTang, Yan, Yeyu Zhang, and Aviv Gibali. 2021. "New Self-Adaptive Inertial-like Proximal Point Methods for the Split Common Null Point Problem" Symmetry 13, no. 12: 2316. https://doi.org/10.3390/sym13122316
APA StyleTang, Y., Zhang, Y., & Gibali, A. (2021). New Self-Adaptive Inertial-like Proximal Point Methods for the Split Common Null Point Problem. Symmetry, 13(12), 2316. https://doi.org/10.3390/sym13122316