Abstract
A full Lie analysis of a system of third-order difference equations is performed. Explicit solutions, expressed in terms of the initial values, are derived. Furthermore, we give sufficient conditions for the existence of two-periodic and four-periodic solutions in certain cases. Our results generalize and simplify some work in the literature.
1. Introduction
The area of difference equations has attracted many researchers recently (see [1,2,3,4,5,6]). Methods for solving difference equations have been developed (see [7,8,9,10,11,12,13,14,15]) and the Lie symmetry approach is one of them. One of the most useful algorithms for computing the symmetries of difference equations is due to Hydon (see [12]). The Lie symmetry group of a system of difference equations is the largest group of point transformations acting on the space of dependent and independent variables that leave the equations unchanged. Thus, an element of such a group maps a solution of the difference equation onto another solution. In this method, the order of the difference equation is reduced, and using the invariance of the equation under group transformations or via the similarity variables, one can find the exact solutions. For more on symmetries, conservation laws and invariants, refer to [16,17].
In this paper, by applying the Lie symmetry method, we generalize some results in [18], where Elsayed and Ibrahim investigated the periodic nature and the form of the solutions of a nonlinear system of difference equations of order three:
We study the system
where are non-zero real sequences, and and are initial values. Because of the definitions and notation we want to use, we study the equivalent system
where are non-zero real sequences.
In coming up with the solutions of (2) using the Lie symmetry method, we first find the Lie algebra of (2). We then reduce the order of the equations by utilizing the invariants and later use iterations to deduce the solutions.
Preliminaries
In this section, we give the background of the Lie symmetry analysis. The notation used comes from [12].
Definition 1
([19]). Let G be a local group of transformations acting on a manifold M. A subset is called G-invariant, and G is called symmetry group of , if whenever , and is such that is defined, then .
Definition 2
([19]). Let G be a connected group of transformations acting on a manifold M. A smooth real-valued function is an invariant function for G if and only if
and every infinitesimal generator X of G.
Definition 3
([12]). A parameterized set of point transformations,
where are continuous variables, is a one-parameter local Lie group of transformations if the following conditions are satisfied:
- 1.
- is the identity map if when .
- 2.
- for every a and b sufficiently close to 0.
- 3.
- Each can be represented as a Taylor series (in a neighborhood of that is determined by x), and therefore
Consider the system of ordinary difference equations
for some smooth function and a regular domain . To find a symmetry group of (6), we consider the group of infinitesimal point transformations given by
where is the parameter and , the continuous functions which we shall refer to as characteristics. Let
be the corresponding infinitesimal generator of with the k-th extension
Note that S is the forward shift operator, acting on n as follows: . Further, the linearized symmetry conditions are given by
Once a characteristic is known, the invariant may be obtained by introducing the canonical coordinate [20]
In general, the constraints on the constants in the characteristics give one a clear idea (without any lucky guess) about the perfect choice of invariants.
2. Symmetries, Reductions and Exact Solutions of (3)
Consider the system (3), that is,
2.1. Symmetries
These are functional equations for the characteristics . To eliminate the first undesirable arguments and , we apply the differential operator on (13) and on (14), and the following expressions are obtained after simplification:
and
To eliminate the second undesirable arguments and , we differentiate (15) with respect to and differentiate (16) with respect to . This yields
and
Solving the resulting differential equations for and gives
and
where and are arbitrary functions of n. We gain more information on these functions by substituting Equations (19) and (20) in Equations (13) and (14). The resulting equations can be solved by the method of separation which yields the following systems:
and
or simply
It turns out that and are zero. From (23), we can see that . Thus, the solutions of (23) are given by , and therefore the characteristics are as follows:
The Lie algebra of (2) is then spanned by
2.2. Reduction and Solutions
Using (11) and (24), we found that the canonical coordinates are given by
We replace and its shift (resp and its shift) with and its shift (resp and its shift) in (23) and the left-hand sides of the resulting equations give the invariants:
The reader can verify that . For the sake of convenience, we consider
instead or simply and . Using the plus sign, this leads to
For the equations in (29), replace in the second equation by to obtain which implies
Iterating several times, one obtains
where . Similarly, we have
where .
The equations and imply that
which yield
where .
Hence, we have
and
where .
3. Solutions of Equation (2)
From the previous section, replacing with , with , with , with and with , respectively, we obtain the solutions for (2) as follows:
Similarly, we obtain that
Thus, the explicit solution , to (2) is given by Equations (45)–(52). In the following section, we look at special cases, where the solutions are expressed in terms of the initial values. In some of these cases, we generalize and simplify some of the results found in [18].
3.1. The Cases Are Constant and Explicit Solutions
Assume that are constants in the equations obtained in the previous section. The solution is then given by
3.1.1. The Case
The solution of the system, which is Theorem 1 of Elsayed [18], is:
3.1.2. The Case
In this case, we obtain Theorem 2 of Elsayed [18] as follows:
3.1.3. Some Cases Where the Constants Are Unit
Substituting the following values, we obtain the solution that Elsayed [18] obtained:
(Theorem 3 in [18]);
(Theorem 4 in [18]);
(Theorem 13 in [18]);
(Theorem 14 in [18]);
(Theorem 15 in [18]);
(Theorem 16 in [18]).
3.1.4. Remaining Cases Where the Constants Are Unit
For each of the following cases:
;
;
;
;
;
;
;
;
our solution is represented by 8 equations, whereas in Elsayed’s case [18] (see Theorems 5–12), the solution is represented by 16 equations. Thus, ours is a great simplification of Elsayed’s solution.
3.2. The Case When Are Sequences of Period 4
In this setting, the solution is given by:
4. Existence of Two-Periodic and Four-Periodic Solutions
Theorem 1.
If and , then the solution of the system is periodic with period two.
Proof.
Under the assumptions , it is clear that
However, implies so that . This yields
However, implies that , which in turn yields . Thus,
Similarly, it is not difficult to show that for all and . Because and , we must have and for all . Thus, the solution has period 2. □
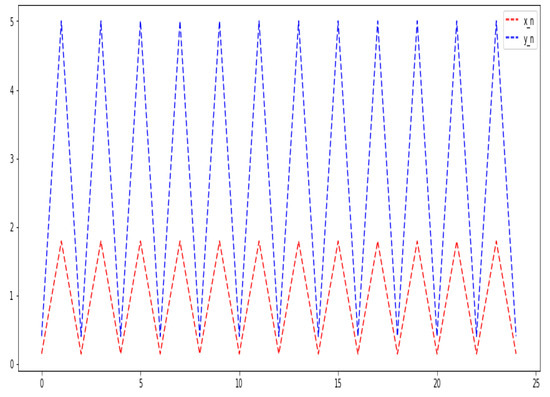
Figure 1.
.
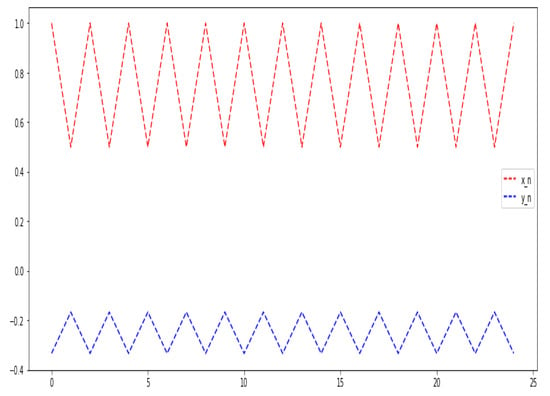
Figure 2.
.
Theorem 2.
If and , then the solution of the system is periodic with period four.
Proof.
Under the given assumptions , we have
However, , i.e., implies that , i.e., implying
so that
However, implies that which yields
so that
Similarly, one can show that for all and . Indeed, the solution under the given assumptions is periodic with period four. □
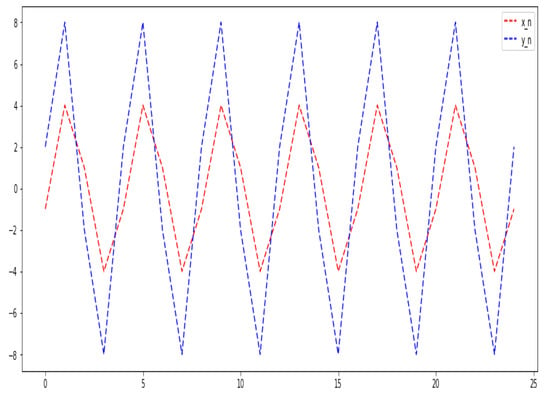
Figure 3.
, , , , , , .
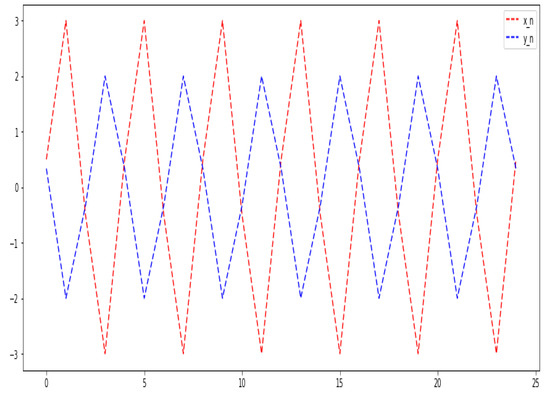
Figure 4.
, , , , , .
Remark 1.
If , then the solution of the system is periodic with period four. The condition is not needed. This is clearly seen from the form of the solution where one replaces . This is the case of Theorem 18 of Elsayed [18].
5. Conclusions
We derived the Lie point symmetries of the difference equation (3). The higher-order equations were reduced to lower-order equations, and via iterations, we were able to obtain the solutions of the system of difference equations (2) in an explicit form. The results found in this paper not only generalize the solutions found by Elsayed and Ibrahim in [18] but also greatly simplify the solutions in Theorems 5–12 in the same paper by using only 8 equations instead of 16 equations. It remains an open problem to determine whether or not there are other sufficient conditions for the periodicities in Theorems 1 and 2.
Author Contributions
Both authors contribute equally to the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Research Funding (NRF) of South Africa, grant number: 132108.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data used to support the findings of this study are included within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Almatrafi, M.B.; Elsayed, E.M.; Alzahrani, F. The Solution and Dynamic Behavior of Some Difference Equations of Fourth Order. Discret. Impuls. Syst. Ser. Math. Anal. 2022, 29, 33–50. [Google Scholar]
- Almatrafi, M.B. Exact solutions and stability of sixth order difference equations. Electron. J. Math. Anal. Appl. 2022, 10, 209–225. [Google Scholar]
- Almatrafi, M.B.; Alzubaidis, M. The solution and dynamic behaviour of some difference equations of seventh order. J. Appl. Nonlinear Dyn. 2021, 10, 709–719. [Google Scholar] [CrossRef]
- Almatrafi, M.B.; Alzubaidi, M. Stability analysis for a rational difference equation. Arab. J. Basic Appl. Sci. 2020, 27, 114–120. [Google Scholar] [CrossRef]
- Almatrafi, M.B. Analysis of Solutions of Some Discrete Systems of Rational Difference Equations. J. Comput. Anal. Appl. 2021, 29, 355–368. [Google Scholar]
- Almatrafi, M.B.; Alzubaidi, M. Periodic solutions and stability of eight order rational difference equations. J. Math. Comput. Sci. 2022, 26, 405–417. [Google Scholar] [CrossRef]
- Maeda, S. The similarity method for difference equations. IMA J. Appl. Math. 1987, 38, 129–134. [Google Scholar] [CrossRef]
- Ibrahim, T.F.; Khan, A.Q. Forms of solutions for some two-dimensional systems of rational Partial Recursion Equations. Math. Probl. Eng. 2021, 2021, 9966197. [Google Scholar] [CrossRef]
- Ibrahim, T.K. Behavior of Two and Three-Dimensional Systems of Difference Equations in Modelling Competitive Populations. Dyn. Contin. Discret. Impuls. Syst. Ser. 2017, 24, 395–418. [Google Scholar]
- Folly-Gbetoula, M.; Nyirenda, D. Lie Symmetry Analysis and Explicit Formulas for Solutions of some Third-order Difference Equations. Quaest. Math. 2019, 42, 907–917. [Google Scholar] [CrossRef]
- Folly-Gbetoula, M.; Nyirenda, D. On some sixth-order rational recursive sequences. J. Comput. Anal. Appl. 2019, 27, 1057–1069. [Google Scholar]
- Hydon, P.E. Difference Equations by Differential Equation Methods; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Mnguni, N.; Folly-Gbetoula, M. Invariance analysis of a third-order difference equation with variable coefficients. Dyn. Contin. Discret. Impuls. Syst. Appl. Algorithms 2018, 25, 63–73. [Google Scholar]
- Levi, D.; Vinet, L.; Winternitz, P. Lie group formalism for difference equations. J. Phys. A Math. Gen. 1997, 30, 633–649. [Google Scholar] [CrossRef]
- Folly-Gbetoula, M.; Kara, A.H. Symmetries, conservation laws, and ‘integrability’ of difference equations. Adv. Differ. Equ. 2014, 2014, 224. [Google Scholar] [CrossRef]
- Akbulut, A.; Mirzazadeh, M.; Hashemi, M.S.; Hosseini, K.; Salahshour, S.; Park, C. Triki–Biswas model: Its symmetry reduction, Nucci’s reduction and conservation laws. Int. J. Mod. Phys B 2022, 2022, 2350063. [Google Scholar] [CrossRef]
- Chu, Y.M.; Inc, M.; Hashemi, M.S.; Eshaghi, S. Analytical treatment of regularized Prabhakar fractional differential equations by invariant subspaces. Comput. Appl. Math. 2022, 41, 271. [Google Scholar] [CrossRef]
- Elsayed, E.M.; Ibrahim, T.F. Periodicity and solutions for some systems of nonlinear rational difference equations. Hacet. J. Math. Stat. 2015, 44, 1361–1390. [Google Scholar] [CrossRef]
- Olver, P.J. Applications of Lie Groups to Differential Equations, 2nd ed.; Springer: New York, NY, USA, 1993. [Google Scholar]
- Joshi, N.; Vassiliou, P. The existence of Lie Symmetries for First-Order Analytic Discrete Dynamical Systems. J. Math. Anal. Appl. 1995, 195, 872–887. [Google Scholar] [CrossRef][Green Version]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).