Abstract
In this paper, we focus on the existence of positive periodic solutions of generalized Leslie–Gower-type population models. Using the topological degree, we provide sufficient conditions to demonstrate the existence of positive periodic solutions to the considered models. It is interesting that the positive periodic solutions in this paper are general positive functions, not e exponential functions, which generalizes and improves the existing results. We note that due to the symmetrical property of periodic solutions, the results of this paper provide a deeper understanding of the periodic behavior of biological populations. Two numerical examples show the effectiveness of our main results.
MSC:
334K13; 34K60
1. Introduction
In 1948, Leslie [1] firstly introduced the Leslie predator–prey model:
where and denote the population densities at time t, and represents the functional response to the prey x. After this, Leslie and Gower [2] systematically studied the biological behavior of this model and established the Leslie–Gower-type population model. In recent years, more and more scholars are paying attention to research on the Leslie–Gower-type population model and its generalizations. Wu and Xie [3] considered a piecewise-smooth Leslie–Gower model with a weak Allee effect and Holling type I functional response and showed that the predator’s food quality and Allee effect have significant impacts and lead to complicated dynamical phenomena. Zhang, Cai and Shen [4] studied a fast–slow Leslie-type predator–prey system with a piecewise-linear functional response by using the canard theory and the singular perturbation theory. In [5], Gao and Yang investigated the extinction and persistence of a generalized Leslie–Gower Holling type II model with Lévy jumps. For more results from studies about Leslie–Gower models, see [6,7,8,9,10,11,12] and related references.
In 2011, Zhu and Wang [13] studied a generalized Leslie–Gower-type population model with Holling type IIschemes:
where and indicate the population densities at time t; is the growth rate of the prey ; is the growth rate of the predator ; denotes the strength of competition in individuals of species ; and indicate the maximum value of the per capita reduction rate of the prey and predator, respectively; and and represent the extent to which the environment provides protection to the prey and predator, respectively. To obtain the positive periodic solutions of system (1), let and ; then, system (1) can be rewritten as
Obviously, if system (2) has a periodic solution , then system (1) has a positive periodic solution . However, the positive periodic solution to system (1) involves e exponential functions, not general positive functions. In this paper, we will use the topological degree to obtain a general form of positive periodic solution for system (1).
In 2002, Aziz-Alaoui [14] studied a Leslie–Gower-type tritrophic population model
When all coefficients in system (3) are positive constants, Aziz-Alaoui proved some theorems on the existence of an attracting set, boundedness of the system, and the existence and global or local stability of equilibria. In system (3), and represent the population densities at time t; is the growth rate of the prey ; estimates the strength of competition among individuals; estimates the extent to which the environment provides protection to the prey; denotes the rate at which will die out when does not exist; is the maximum value which per capita reduction rate of can achieve; the meanings of and are same as those of and ; the meanings of and are same as those of and ; is the value of at the per capita removal rate; and represents the residual loss in species . In the present paper, we suppose that all coefficients in system (3) are positive periodic solutions. We will use the topological degree and mathematical analysis techniques to determine the existence of a positive periodic solution to system (3).
The main contributions of this paper are as follows:
- (1)
- We study two classes of population models by using topological degree theory and obtain the existence results of positive periodic solutions which are general positive functions and different from existing ones.
- (2)
- We develop the topological degree theory for investigating the existence of positive periodic solutions of population models.
- (3)
- To find some a priori bounds of positive periodic solutions, the suitable conditions for the coefficients of the considered population models are given.
The structure of the remainder of this paper is as follows: Section 2 gives the results of the existence of a positive periodic solutions to system (1). Section 3 gives the results of the existence of a positive periodic solution to system (3). Section 4 contains two examples verifying our results. Finally, we provide our conclusions.
2. Positive Periodic Solutions to System (1)
Let be a subset of the topological space. and be the boundary and the closure of . Let
with the norm . Obviously, is a two dimensional Banach space.
The existence of positive periodic solutions to system (1) will be proven by using the topological degree (see Theorem 6.3 in [15]) in the present case. Consider thefollowing lemma:
Lemma 1.
Suppose there is a bounded open subset such that the following are true:
- (1)
- The systemdoes not have solutions to for , where
- (2)
- for , where ,
- (3)
Then, system (1) has at least one periodic solution on .
To determine the results for the existence of periodic solutions to system (1) by using Lemma 1, consider the following assumptions:
- (H1)
- The following inequality is satisfied:
- (H2)
- The following inequality is satisfied:where is defined by Lemma 2.
Lemma 2.
If assumption () holds, then any non-negative ω-periodic solution to system (4) is bounded above for all .
Proof.
Let be the -periodic solution to system (4). Let
If there exists a point such that , then . Using the first equation of system (4), we arrive at
i.e.,
Then,
Since , we have
If there exists such that , then . Using the second equation of system (4), we arrive at
i.e.,
Then, we obtain
Adding and subtracting the term in (7), we can assert that
Based on assumption (), we arrive at such that
which is contradictory. Hence, there is a positive number such that
In view of (6) and (8), we obtain
where . □
Next, we consider the lower bounds for the solutions of system (4).
Lemma 3.
If assumptions () and () are satisfied, then every non-negative ω-periodic solution to system (4) is bounded below for all .
Proof.
Let be the -periodic solution to system (4) and
If there is a point such that , then . Using the first equation of system (4), we arrive at
i.e.,
Using Lemma 2 and assumption (H2), we obtain
and
If there exists such that , then . Using the second equation of system (4), we obtain
i.e.,
Thus,
From (9) and (10), we have
where . □
Theorem 1.
Assume that assumptions () and () are satisfied. Then, system (1) has at least one positive ω-periodic solution.
Proof.
Since assumptions () and () hold, from Lemmas 2 and 3, the positive periodic solutions of system (4) have lower and upper bounds. So, define by
where and are the lower and upper bounds of system (4), respectively. We easily obtain that system (4) has no solution in for all . Thus, condition (1) of Lemma 1 is satisfied. Next, we show that condition (2) of Lemma 1 is satisfied. If , from the first equation of (5) and assumption (), we have
where , is sufficiently small. If , using the second equation of (5), we have
where . Furthermore, if , from the first equation of (5) and assumption (), we have
where . If , using the second equation of (5), we have
where . From (11)–(14), we determine that condition (2) of Lemma 1 is satisfied. Finally, we show that condition (3) of Lemma 1 holds. Define the map
where
Obviously, for ; then, is a homotopy. Using the homotopy invariance property of the Brouwer degree, we have
We use Lemma 1 to conclude that system (1) has at least one positive -periodic solution on . □
Remark 1.
In [13], the authors obtained sufficient conditions for the global attractivity of positive periodic solutions to system (1) by using the Lyapunov functional method. Hence, in this paper, we do not consider the asymptotic property of the positive periodic solutions to system (1).
3. Positive Periodic Solutions to System (3)
Let
with the norm . Obviously, is a three-dimensional Banach space.
To obtain the results of the existence of positive periodic solutions to system (3), we consider the following lemma:
Lemma 4.
Assume there is a bounded open subset such that the following are true:
- (1)
- The systemdoes not have solutions to for , where ,
- (2)
- for , where ,
- (3)
Then, system (3) has at least one ω-periodic solution to .
In this section, we need the following assumptions:
- (A1)
- The following inequality is satisfied:where is defined by (18).
- (A2)
- The following inequality holds:
- (A3)
- The following inequality holds:
- (A4)
- The following inequality holds:where is defined by Lemma 5.
- (A5)
- The following inequalities hold:andwhere is defined by Lemma 5, and is defined by (21).
- (A6)
- The following inequality holds:where and are defined by (20) and (22), respectively.
Lemma 5.
If assumption () holds, then every non-negative ω-periodic solution to system (15) is bounded above for all .
Proof.
Let be the -periodic solution to system (15) and
If there is a point such that , then . Using the first equation of system (15), we have
i.e.,
Then,
Since , we have
If there is a point such that , then . Using the third equation of system (15), we have
i.e.,
Thus, according to assumption (), we have
From the second equation of system (15) and (17), we arrive at
Thus, according to assumption (), we have
If there is a point such that , then . Using the second equation of system (15), we arrive at
i.e.,
Then,
Thus, according to assumption (), we have
From the third equation of systems (15) and (19) and assumption (), we have
In view of (16), (18) and (20), we obtain
where . □
Lemma 6.
If assumptions ()–() hold, then every non-negative ω-periodic solution to system (15) is bounded below for all .
Proof.
Let be the -periodic solution to system (15) and
If there exists such that , then Using the first equation of system (15), we have
i.e.,
In view of Lemma 5 and assumption (), we obtain
and
If there is a point such that , then . Using the third equation of system (15), we have
i.e.,
Thus, according to assumption (), we have
From the second equation of system (15) and (22), we have
According to assumption (), we obtain
If there is a point such that , then . Using the second equation of system (15), we arrive at
i.e.,
Then,
According to assumption (), we obtain
Using the third equation of system (15), assumption (), and (24), we have
where Hence, we have
From (20), (22), and (25), we have
where . □
Theorem 2.
Assume that assumptions ()–() are satisfied. Then, system (3) has at least one positive ω-periodic solution.
Proof.
Since assumptions ()–() hold, from Lemmas 5 and 6, the periodic solutions to system (15) have lower and upper bounds. So, define as
where and are the lower and upper bounds of system (15), respectively. We easily determine that system (15) has no solution in for all . Thus, condition (1) of Lemma 4 is satisfied. We also determine that conditions (2) and (3) of Lemma 4 hold. Since the proof is similar to the corresponding proof of Theorem 1, we omit it. Therefore, we use Lemma 4 to conclude that system (3) has at least one positive -periodic solution on . □
Remark 2.
There have been numerous achievements regarding the dynamic properties of three-population models (see [1,2,14]). This is especially true in in [14], where the authors provided a detailed discussion on the dynamic behavior of the equilibrium point of system (3). Therefore, this article will not discuss the above-mentioned issues.
4. Numerical Examples
This section presents two examples that demonstrate the validity of our results.
Example 1.

Consider the following equation:
where
Choosing , after a simple calculation, we have ,
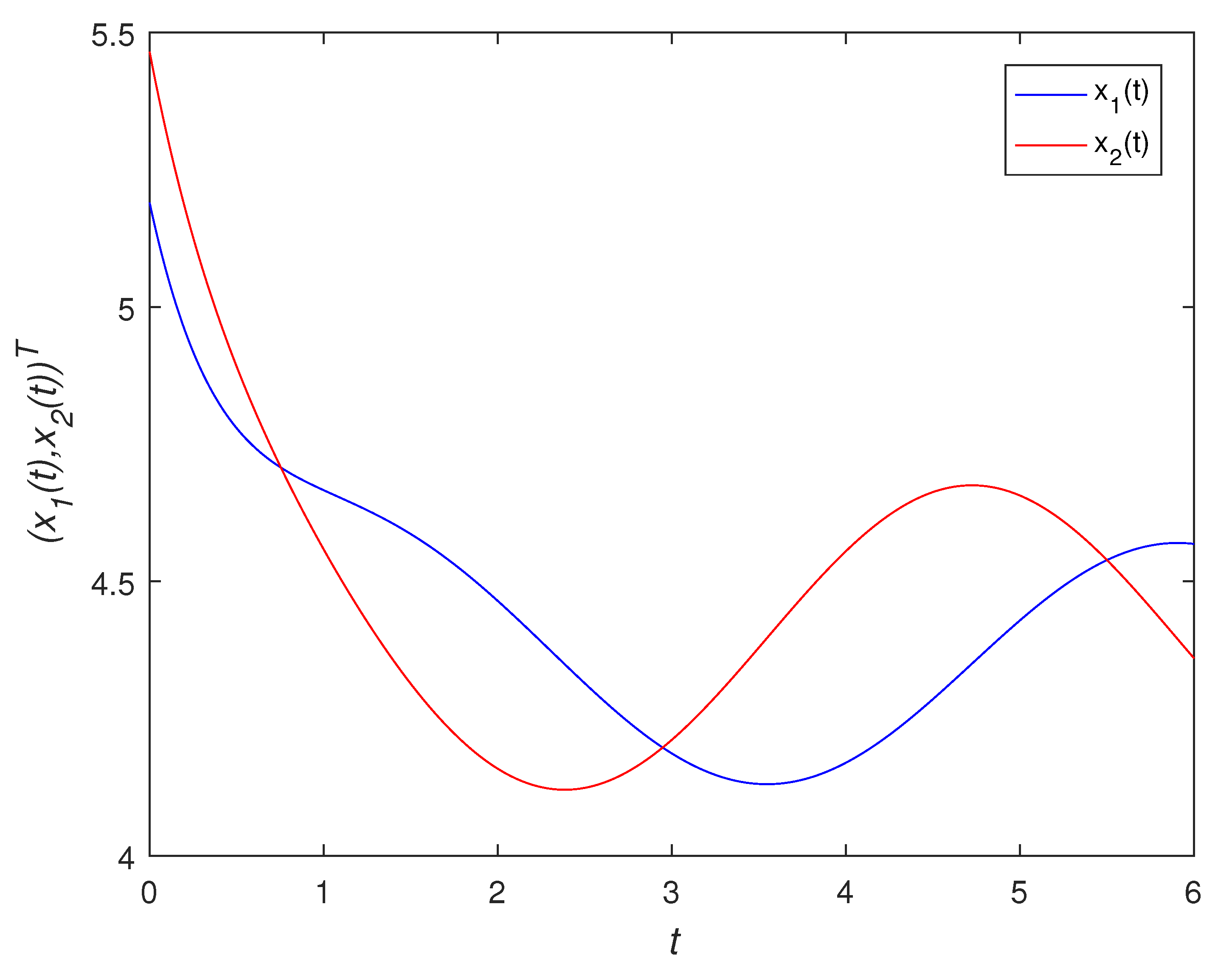
Hence, all conditions of Theorem 1 hold, and we determine that system (26) has a positive -periodic solution. Figure 1 shows the positive periodic solution to system (26).
Figure 1.
Positive periodic solution to system (26).
Example 2.
Consider the following equation:
where
Choosing , after a simple calculation, we have
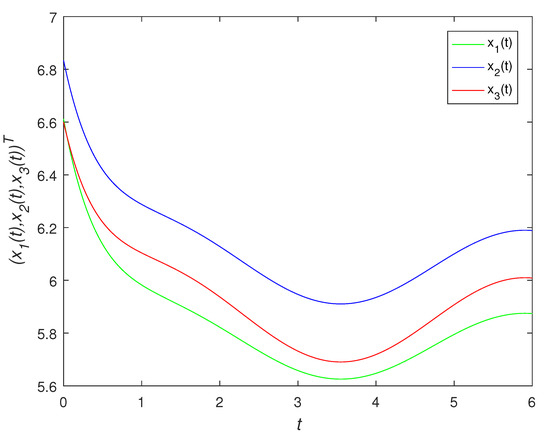
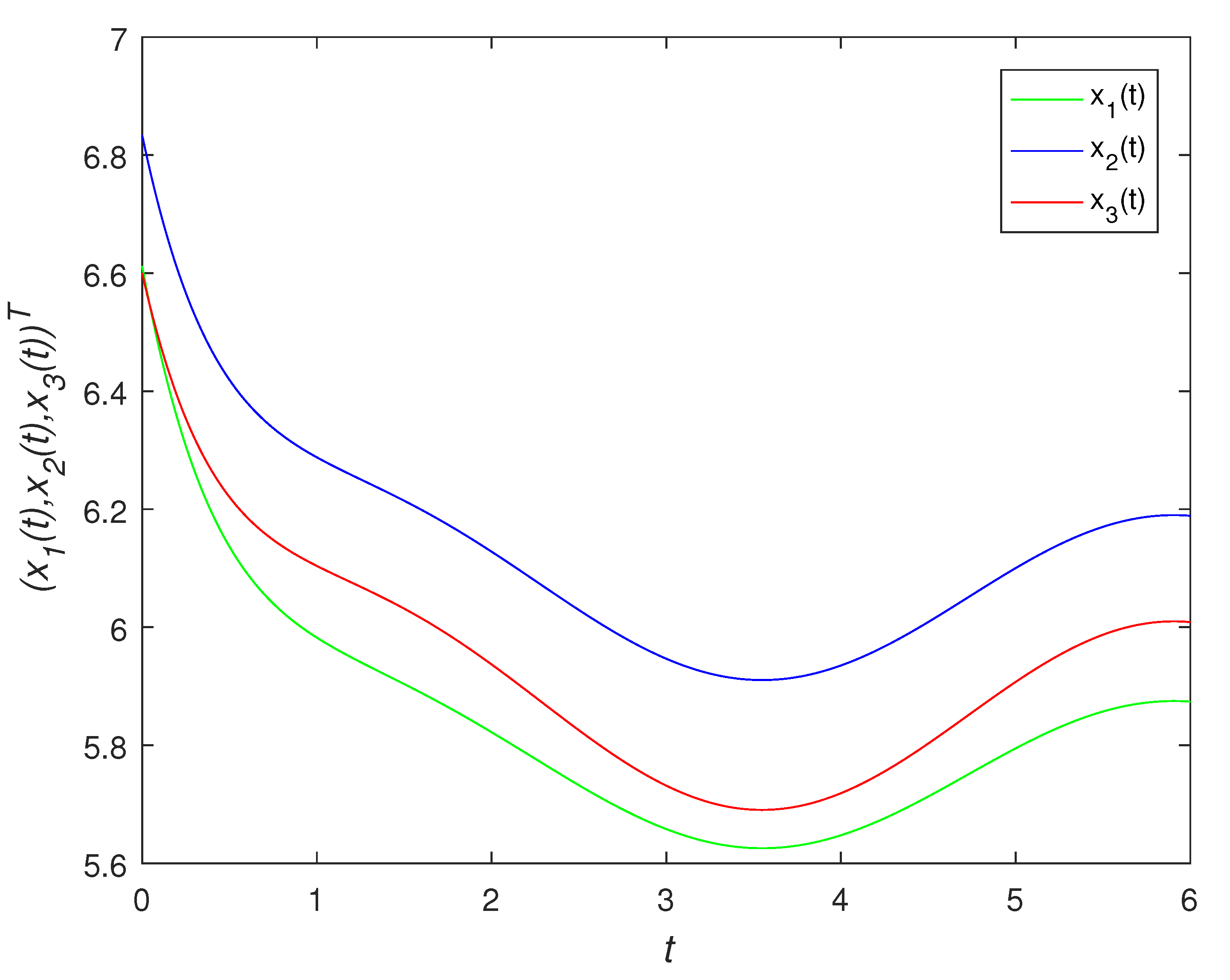
Hence, all conditions of Theorem 2 hold, and we determine that system (27) has a positive -periodic solution. Figure 2 shows the positive periodic solution to system (27).
Figure 2.
Positive periodic solution to system (27).
5. Conclusions
The existence of periodic solutions in population models has always been a hot research topic. In the present paper, we investigate the existence of positive periodic solutions for two types of population models. We obtain results indicating the existence of positive periodic solutions using topological degree theory. It should be pointed out that the positive periodic solutions obtained in the past were mostly exponential functions. However, positive periodic solutions are general positive functions. Hence, the research in this paper extends the existing research results. In the next paper, we will explore the existence of positive periodic solutions for neutral-type population models, and we will also consider the existence of positive periodic solutions for population models on different time scales.
Author Contributions
Methodology, A.S.; formal analysis, X.L.; writing—original draft, B.D. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Doctoral Training Program of Jiyang College, Zhejiang Agriculture and Forestry University (RC2022D03); the key program of the Anhui University Natural Sciences fund (2024AH051122); and the Anqing Normal University Campus Key Project (ZK202302ZD).
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Leslie, P. Some further notes on the use of matrices in population mathematics. Biometrica 1948, 35, 213–245. [Google Scholar] [CrossRef]
- Leslie, P.; Gower, J. The properties of a stochastic model for the predator-prey type of interaction between two species. Biometrica 1960, 47, 219–234. [Google Scholar] [CrossRef]
- Wu, X.; Xie, F. Slow-Fast Dynamics of a Piecewise-Smooth Leslie-Gower Model with Holling Type-I Functional Response and Weak Allee Effect. Int. J. Bifurc. Chaos 2024, 34, 2450086. [Google Scholar] [CrossRef]
- Zhang, H.; Cai, Y.; Shen, J. Super-Explosion and Inverse Canard Explosion in a Piecewise-Smooth Slow-Fast Leslie-Gower Model. Qual. Theory Dyn. Syst. 2024, 23, 73. [Google Scholar] [CrossRef]
- Gao, Y.; Yang, F. Persistence and extinction of a modified Leslie-Gower Holling-type II two-predator one-prey model with Levy jumps. J. Biol. Dyn. 2022, 16, 117–143. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Chen, Y.; Li, Z.; Chen, F. Stability and bifurcation in a Leslie-Gower predator-prey model with Allee effect. Int. J. Bifurc. Chaos 2022, 32, 2250040. [Google Scholar] [CrossRef]
- Korobeinikov, A. A Lyapunov function for Leslie-Gower predator-prey models. Appl. Math. Lett. 2001, 14, 697–699. [Google Scholar] [CrossRef]
- Han, R.; Guin, L.; Dai, B. Cross-diffusion-driven pattern formation and selection in a modified Leslie-Gower predator-prey model with fear effect. J. Biol. Syst. 2020, 28, 27–64. [Google Scholar] [CrossRef]
- Kumar, U.; Mandal, P. Role of Allee effect on prey-predator model with component Allee effect for predator reproduction, Math. Comput. Simulation 2022, 193, 623–665. [Google Scholar]
- Teng, Z. On the persistence and positive periodic solution for planar competing Lotka-Volterra systems. Ann. Differ. Equ. 1997, 13, 275–286. [Google Scholar]
- Chen, F. The permanence and global attractivity of Lotka-Volterra competition system with feedback controls. Nonlinear Anal. Real World Appl. 2006, 7, 133–143. [Google Scholar] [CrossRef]
- Song, X.; Li, Y. Dynamic behaviors of the periodic predator-prey model with modified Leslie-Gower Holling-type II schemes and impulsive effect. Nonlinear Anal. Real World Appl. 2008, 9, 64–79. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, K. Existence and global attractivity of positive periodic solutions for a predator-prey model with modified Leslie-Gower Holling-type II schemes. J. Math. Anal. Appl. 2011, 384, 400–408. [Google Scholar] [CrossRef]
- Aziz-Alaoui, M. Study of a Leslie-Gower-type tritrophic population model. Chaos Solitons Fractals 2002, 14, 1275–1293. [Google Scholar] [CrossRef]
- Amster, P. Topological Methods in the Study of Boundary Value Problems, Universitext; Springer: New York, NY, USA, 2014. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).