Abstract
In this article, we give rotational motions on any straight line or any parabola in a scalar product space. To achieve this goal, we first define the generalized Galilean scalar product and determine the generalized Galilean skew symmetric and orthogonal matrices. Then, using the well-known Rodrigues, Cayley, and Householder maps, we produce the generalized Galilean rotation matrices. Finally, we show that these rotation matrices can also be used to determine parabolic rotational motion.
1. Introduction
Rotational motions on any general ellipse or hyperbola in the plane, known as non-parabolic conical rotations, were studied in our previous article [1]. These motions are generalizations of the Euclidean and Lorentzian rotations. Our aim in this paper is to formulate the rotational motions on a straight line or a parabola. The rotational motions on lines perpendicular to the x-axis are described as Galilean transformations and they are handled using dual numbers. Therefore, first we give some brief information about the Galilean transformations and dual numbers.
Galileo’s geometry is based on Galileo’s theory of relativity [2,3]. A Galilean transformation is a map which ties in space and time coordinates of two systems moving at a constant velocity relative to each other [4,5]. In the plane, it is defined as . That is, it expresses a motion on the line (see [6] for larger dimensions).
Just as Euclidean and Lorentzian transformations can be expressed with complex and hyperbolic numbers, Galilean maps can be stated by dual numbers that generate a nilpotent element [3,7,8]. The Galilean plane is also called the dual numbers plane. The lines determine a circle in the Galilean plane, and the motions on can be studied as rotational motions by using dual numbers. These rotational motions are also called Galilean rotations and correspond to shear transformations in the Euclidean plane. Algebra of dual numbers has been designed by Clifford [9]. Then, first studies on dual numbers were given by Kotelnikov [10] and ref. [11]. The most important geometrical interpretations of dual numbers began with the E. Study transformation. E. Study transformation states that each unit dual vector corresponds to one directional line segment [11]. Some mechanical, geometric and physical applications of dual numbers and Galilean transformations in recent years can be found in the References section [12,13,14,15]. Applications to fractal geometry of Galilean transformation can be found in the article [16]. Also, one-parameter planar Galilean transformations on the Galilean plane are given in [17,18]. The importance of dual numbers, especially in the fields of mechanics, kinematics and robotics, has increased with the use of quaternions in screw theory. New geometric and kinematic applications emerged with the generalization of these numbers, which attracted many researchers [19,20,21]. On the other hand, the examination of ruled surfaces obtained with the help of linear motions with the help of dual numbers has made these numbers widely used in differential geometry [22,23].
The set of dual numbers is
A dual number can be represented by an ordered pair . The component x is the component of the dual number in the real unit direction, and the component y is the component in the dual unit direction. The argument of a dual number is . When a dual number on the Galilean circle is multiplied by the dual number , then the product corresponds to the dual number derived by rotating around the origin through the angle , and it is also on the same Galilean circle [24,25,26]. In general, an orthogonal matrix whose determinant is 1 determines a rotation, that is, a transformation which does not change the length from any point to a fixed point in which the motion occurs around it. This transformation takes place on a circle in the Euclidean plane, on a hyperbola in the Lorentzian plane, on two parallel lines in the Galilean plane [8,24,27], and can be represented, respectively, by the following matrices:
The aim of our study is to define rotational motions on any straight line or any general parabola. Obviously, it is possible to study a rotational motion on a general straight line with the help of Galilean and affine transformations, but this can require unpleasant calculations and cannot lead to any new subject. Instead, we use a different approach, and we generalize the Galilean scalar product and determine skew symmetric and orthogonal transformations in this scalar product space, which we call the generalized Galilean plane. Then, we formulate rotational motion on any straight line by using the generalized Galilean skew symmetric matrix and the well-known Rodrigues, Cayley, and Householder maps. Thus, the generalized Galilean rotation matrices will be derived in an elegant and useful way. It is also shown that the generalized Galilean rotation matrices can also be used to determine a motion on a general parabola related to the angle parameter. Although the motion on the parabola is a non-linear motion, it can be interpreted as a rotational motion with matrices in this study using homogeneous coordinates. Galilean transformations are also known in mathematics as shear transformations. Therefore, this study can also be considered as a generalization of shear transformations.
2. Generalized Galilean Transformation, Rotation, and Reflection
We know from [6] that the Galilean transformation can be generalized by a linear transformation. In this section, we give the generalized Galilean scalar product concept using a certain linear transformation, which accepts the line pairs as a circle, one of whose special cases is the well-known Galilean scalar product. Then, we examine the generalized Galilean transformations with the help of the defined bilinear form. For detailed information on generalized bilinear forms, see [28,29,30].
Definition 1.
For any points , and such that ,
where
determines a scalar product, and it is called the generalized Galilean scalar product or the -scalar product, in short. The real vector space with the generalized Galilean scalar product will be denoted by .
Notice that is a degenerate bilinear form, and if and , then we have the standard Galilean scalar product. As usual, the norm of a vector in is defined by
and for a positive real number r,
determines the -circle having radius r, as well as the center at the origin. Clearly, the circle is the union of two parallel lines. Using the norm of a vector, one can derive the distance formula between points and as
where and . However, this formula does not give any value different from 0 for any two points on the same line of a -circle. So, we define the concept of -arc length of a -circle to define -angle measurement before determining -rotation matrices: Let and be two points on a same line of the -circle . Then, the directed -arc length between the points U and V, consistent with the counterclockwise orientation, can be defined as follows:
Note that if , and , then we get
Then, using the -arc length, we can define the directed -angle measurement between the vectors and as follows:
It is possible to remove A and B parameters in the directed -angle measurement between vectors and on the same line of the -circle : If and are on the same line, then we get and we derive that
Notice that if , then the Euclidean directed area of the -circular sector determined by and is equal to . So, the -arc length and angle measurement concepts are consistent with the classical geometries. Using the normalization of vectors, it can be seen that this formula holds for any two vectors and that are in the same part of the plane divided by the line , in which case . As usual, we define that and are -orthogonal if , and self -orthogonal vectors are called -isotropic. It is clear that for nonzero vectors and , if , then or . Then, at least one of the vectors or must be parallel to the line . Additionally, if none of nor is parallel to the line , then we get that . Note that every vector parallel to the line is -isotropic, and the only line that is -orthogonal to a given non -isotropic vector is .
Finally, we define what we mean by rotation matrix in -plane: For all vectors ,, if matrix T satisfies the condition , then it is called -orthogonal. It is easy to see that T is -orthogonal if and only if as in [1]. However, in this case, this fact does not yield that if T is -orthogonal then is 1 or , since we have that . However, to ensure consistency, we define -orthogonal matrices whose determinant is 1, as the -rotation matrix. In the next sections, we produce rotation matrices using well-known methods.
Generalized Galilean Rotation and Reflection
The Rodrigues rotation formula is a beneficial way to create rotation matrices [31,32]. First, we need to determine -skew symmetric matrices to use in the Rodrigues rotation formula. Let S be the matrix. If for all vectors ,, then S will be called the -skew symmetric matrix. Then, it is not difficult to see that the matrix S is -skew symmetric if and only is . The following theorem gives the -skew symmetric matrices:
Theorem 1.
In , -skew symmetric matrices are as follows for :
Proof.
It is clear that if S is a -skew symmetric matrix, then is also a -skew symmetric matrix where . Let us define
If S is a -skew symmetric matrix, using the equality of , we get the system of equations
Then, we get
and
for . To remove denominators, we take , where , and we get
Notice that if , then ; if , then . The last matrix satisfies these special cases. Since , k is unnecessary. □
To be able to derive a rotation matrix using the matrix S in the Rodrigues formula, must be satisfied. Then, we get . So, we have
and . Now, we can give the -rotation matrix about the origin by the angle using the Rodrigues formula, as follows:
Theorem 2.
In ,
is the -rotation matrix about the origin by the angle θ.
Proof.
Since for , we have that . Thus, we get
One easily proves that and □
Remark 1.
Notice that does not change the points on the line , which can be seen as the -circle with radius 0 having its center at the origin. In addition, for a point U on a line of a -circle with radius having its center at the origin, transforms the point U to another point V on the same line of the -circle, such that . To show this consistency, consider vectors and on the same line of a -circle , such that . Then, we have
Solving the system of equations
one derives that
and
where and .
Example 1.
Given the -circle for
one of whose lines has the following parametric equation
Then, one has the following -rotation matrix:
For the vectors and , the angle between and is
One can check the -rotation matrix with the rotation angle 2 as
In addition, since , the directed -arc length is
where and , which is also equal to .
Next, we consider the Cayley map [31,32,33,34,35]. If S is a -skew symmetric matrix, then has an inverse. So, we can define the Cayley map by in the Galilean plane. If , then we get , and it gives a generalized Galilean rotation matrix. The following theorem shows this fact:
Theorem 3.
If S is a -skew symmetric matrix given in Equation (12) with , then
is the -rotation matrix about the origin about the angle θ.
Proof.
First, we see that
for the matrix (12). Then, we have that
In order to give the -rotation by the angle , the following equation must be hold:
Then, we get in the matrix (12), and we derive the -rotation by the angle , as follows:
□
Finally, we use the Householder transformation to produce generalized Galilean rotation matrices. The Householder map is given by
where is any nonzero vector. It is a reflection about a line, a plane or a hyperplane through the origin and orthogonal to the vector . It is known by the Cartan–Dieudonné theorem that every orthogonal transformation is the combination of reflections in a generalized scalar product space [29,30]. We see that this property is also valid for , since if M and N are -orthogonal matrices, then we have . Here, we also see that the matrix of the -Householder transformation has a determinant . Thus, we can combine two -Householder transformations to produce -rotation matrices in . However, our aim here will not be to obtain the general -rotation matrix in . We have already given this matrix in Theorem 2. Our aim here is to find the -rotation transformation that takes a non -isotropic vector to another vector of the same -norm. We already know that and must lie on the same line part of an -circle and that -rotation matrices leave the -isotropic vectors fixed (Remark 1).
In , for a non -isotropic vector , the -Householder map can be given by
Then, we have the matrix
where is the Kronecker delta. The matrix is -symmetric and -orthogonal since
In addition, one can derive the matrix as follows:
Since is -orthogonal and , we call the -Householder map -reflection, as usual. One can easily see that if P is a point on a -circle with nonzero radius, and , then is on the same -circle (but, other line part of the -circle), the midpoint of P and is on the line , and is parallel to the vector . So, we call the line , -symmetry axis, and call the point , the -symmetry of the point P about the line . Notice that is the only line -orthogonal to or the line .
Corollary 1.
-Householder transformation (or -reflection) reflects points about the line in parallel to non -isotropic vector , leaving -lengths invariant.
Example 2.
Consider the generalized Galilean plane where and . Given -circle and a vector . Then, using Formula (19), we have the -Householder transformation matrix, as follows:
If maps the vector to , then
Notice that we get -reflection about the line , in parallel to the vector . One can check that the line passing through the points and is , , and is on the line .
By the following theorem, one can find the -reflection that maps a given vector to other given vector such that and are on the opposite lines of the same -circle with a nonzero radius:
Theorem 4.
For non -isotropic vectors , and , if , then .
Proof.
One can easily get that
and
Thus, we get
□
Remark 2.
Another transformation that transforms a point on one line part of a -circle with a nonzero radius to a desired point on the other line part of the -circle can be construct as follows: Consider points P and Q on separate lines of a -circle with a radius . Then, , and Q is on the same line of the -circle, and if
then
One also needs the following theorem to derive the desired -rotation matrix:
Theorem 5.
For non -isotropic vectors , and , if , then .
Proof.
Using the same approach in the previous theorem, we get
and
Thus, we have
□
Finally, one can use the following corollary to find the -rotation matrix that maps a given vector to other given vector such that and are on the same line part of a -circle with a nonzero radius:
Corollary 2.
For non -isotropic vectors , and , if , then .
Proof.
By the previous theorem, we have . Additionally, one can see that
Thus, we get that . Since is -orthogonal and we have that , the transformation is -rotation that maps to , where can be found out using Formula (9). □
Example 3.
Consider the generalized Galilean plane , where and . Given two vectors and on the same part of the -circle , let us determine the -rotation matrix that transforms the vector to the vector . By the last corollary, it is the matrix for vectors and . Using the -Householder transformation matrix (19), we get
Then, we have
By Formula (9) or (10), the -angle measurement between the vectors and is
We can verify the result using the -rotation matrix (13) for , and as follows:
3. Parabolic Rotational Motion on the Plane
The special Euclidean group in is the semidirect product of the special orthogonal group with itself [36]. In the generalized Galilean plane , can be represented as follows:
Every element of determines an isometric displacement. While the matrix -rotates a point in , the vector part translates the -rotated point. If the translation vector is , then, using the homogeneous coordinates, we have the following transformation matrix:
Applying the matrix M to a point by times, we get the following equality, which can be shown by induction:
It is clear that the obtained points are on the curve with the following parametric equation for :
The implicit equation of is
where
Note that if , then Equation (27) determines a parabola, since the discriminant of the equation is 0, and the determinant of the coefficients is not equal to 0. So, as changes, the point P moves on the parabola. We call this motion parabolic rotational motion. Here, the angle of rotation can be defined by . In addition, if a parabola with a general equation (such as Equation 27) is given, then one can find the values of p and q for a given value as
using Equations (28) and (29). It is not difficult to see that if is on Parabola (27), then
is also on the same parabola. Thus, the following theorem is derived:
Theorem 6.
Given a parabola with the following equation:
Then, for the angle θ, the function
with and the function
with parabolically rotates any point on the parabola (32), where
Example 4.
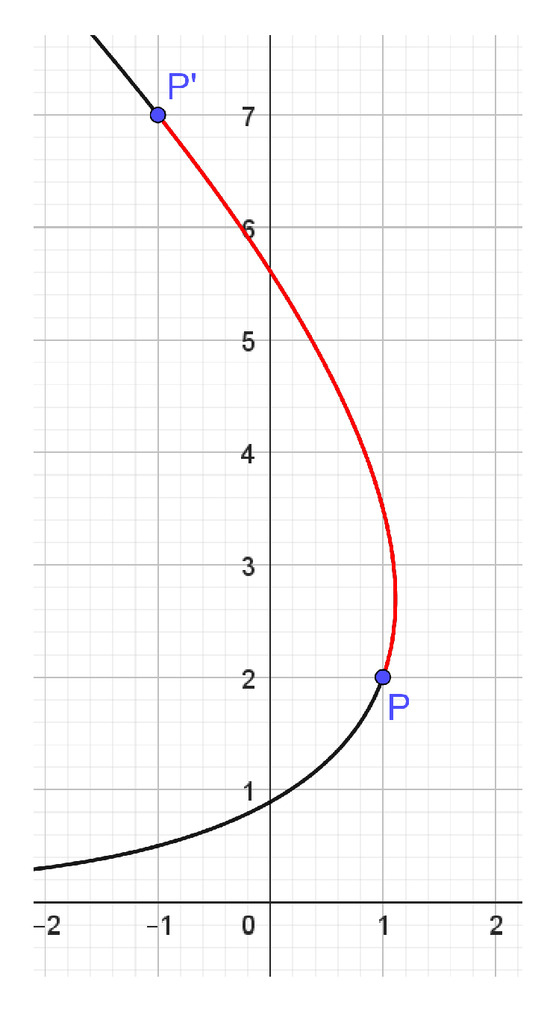
Given a parabola with the following equation:
Let us construct the matrix M for to move the point on the parabola. Using Formula (31), one can calculate that
and we get
for , and
for . It is easy to see that and are on the parabola as they move in a parabolic rotational motion with angle . For instance, let us consider the point on the parabola and rotate it parabolically for the parabolic angle . Then, for , we get
and
It is easy to check that is on the same parabola (see Figure 1).
Figure 1.
Rotational motion on a parabola.
4. Discussion
In this article, we generalized the two-dimensional Galilean scalar product and determined the generalized Galilean skew symmetric matrices. Then, the rotational motions on any straight line were formulated by using the generalized Galilean skew symmetric matrix and the well-known Rodrigues, Cayley and Householder maps. It was also shown that the generalized Galilean rotation matrices can also be used to determine a motion on a general parabola related to the angle parameter. Thanks to the obtained result, it is seen that the motion on the parabola can be interpreted as rotational motion with matrices using homogeneous coordinates. In practical terms, linear motion describes the straight-line movement of objects, characterized by constant velocity or acceleration, and finds extensive use in fields such as transportation design and robotic motion planning. Meanwhile, parabolic motion illustrates the path of projectiles influenced by gravitational forces, with applications in sports science, engineering safety assessments, and robotics for optimizing launch angles and trajectories. In computer graphics, these physics principles are integral for creating realistic animations, motion simulations, and enhancing interactive gaming experiences, demonstrating the interplay between physics and technology in real-world applications. As a future direction, the rotational motions on any straight line or any parabola in the three-dimensional space can be considered. In addition, dual numbers, which comprise the number system associated with the Galilean plane, and the dual quaternions associated with these numbers can be generalized. In future studies, this paper will also serve as a reference for examining generalized screw motions using generalized dual quaternions.
Author Contributions
Conceptualization, H.B.Ç., M.Ö. and İ.Ö.; methodology, H.B.Ç.; validation, H.B.Ç., İ.Ö., O.Ç. and M.Ö.; formal analysis, İ.Ö. and O.Ç.; investigation, İ.Ö., O.Ç. and H.B.Ç.; writing—original draft preparation, H.B.Ç. and İ.Ö.; writing—review and editing, H.B.Ç. and M.Ö.; supervision, H.B.Ç. and M.Ö. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in this article; further inquiries can be directed to the corresponding author.
Acknowledgments
The authors would like to thank the anonymous referees for their helpful suggestions and comments, which improved the original manuscript of this article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Çolakoğlu, H.B.; Öztürk, İ.; Özdemir, M. Non-parabolic conical rotations. J. Comput. Appl. Math. 2023, 420, 114766. [Google Scholar] [CrossRef]
- Artıkbayev, A.; Kurudirek, A.; Akça, H. Occurrence of Galilean geometry. Appl. Comput. 2022, 2, 115–117. [Google Scholar] [CrossRef][Green Version]
- Yaglom, I.M. A Simple Non-Euclidean Geometry and Its Physical Basis: An Elementary Account of Galilean Geometry and the Galilean Principle of Relativity; Springer: New York, NY, USA, 1979. [Google Scholar]
- Klinaku, S. Galilean transformation in polar coordinates and Doppler effect. Results Phys. 2021, 31, 104885. [Google Scholar] [CrossRef]
- Klinaku, S. Geometric representation of the Galilean transformation. Results Phys. 2022, 39, 105719. [Google Scholar] [CrossRef]
- Yaylı, Y.; Tütüncü, E.E. Generalized Galilean transformations and dual quaternions. Sci. Magna 2009, 5, 94–100. [Google Scholar]
- Kisil, V. Geometry of Mobius Transformations: Elliptic, Parabolic and Hyperbolic Actions of SL2(R); Imperial College Press: London, UK, 2012. [Google Scholar]
- Yaglom, I.M. Complex Numbers in Geometry; Academic Press: London, UK, 1968. [Google Scholar]
- Clifford, M.A. Preliminary sketch of biquaternions. Proc. Lond. Math. Soc. 1871, 1, 381–395. [Google Scholar] [CrossRef]
- Kotelnikov, A.P. Screw Calculus and Some Applications to Geometry and Mechanics; Scientific notes of Kazan University; URSS: Moskow, Russia, 1895. [Google Scholar]
- Study, E. Geometrie der Dynamen: Die Zusammensetzung von Kraften und Verwandte Gegenstande der Geometrie; Cornell University Library: New York, NY, USA, 1903. [Google Scholar]
- Behr, N.; Dattoli, G.; Lattanzi, A.; Licciardi, S. Dual numbers and operational umbral methods. Axioms 2019, 8, 77. [Google Scholar] [CrossRef]
- Bongardt, B. An analysis of the dual-complex unit circle with applications to line geometry. In Proceedings of the Conference on Geometry: Theory and Applications, Innsbruck, Austria, 3–7 June 2019. [Google Scholar]
- Torres del Castillo, G.F. Some applications in classical mechanics of the double and the dual numbers. Rev. Mex. Física E 2019, 65, 152–155. [Google Scholar] [CrossRef]
- Torres del Castillo, G.F.; Gutiérrez-Herrera, K.C. Double and dual numbers. SU (2) groups, two-component spinors and generating functions. Rev. Mex. Física 2020, 66, 418–423. [Google Scholar] [CrossRef]
- Büyükyılmaz, E.A.; Yaylı, Y.; Gök, İ. A new construction of the Sierpinski triangles with Galilean transformations. Math. Sci. Appl. E-Notes 2016, 4, 151–163. [Google Scholar] [CrossRef]
- Akar, M.; Yüce, S. Kuruoğlu N. One-parameter planar motion on the Galilean plane. Int. Electron. J. Geom. 2013, 6, 79–88. [Google Scholar]
- Gürses, N.; Yüce, S. One-parameter planar motions in generalized complex number plane. Adv. Appl. Clifford Algebr. 2015, 25, 889–903. [Google Scholar] [CrossRef]
- Valverde, A.; Tsiotras, P. Spacecraft robot kinematics using dual quaternions. Robotics 2018, 7, 64. [Google Scholar] [CrossRef]
- Majernik, V. Quaternion formulation of the Galilean space-time transformation. Acta Phys. Slovaca 2006, 56, 9–14. [Google Scholar]
- Akyar, B. Dual quaternions in spatial kinematics in an algebraic sense. Turk. J. Math. 2008, 32, 373–391. [Google Scholar]
- Naghi, M.F.; Abdel-Baky, R.A.; Mofarreh, F. Time-like ruled surface in one-parameter hyperbolic dual spherical motions. Abstr. Appl. Anal. 2022, 2022, 9323490. [Google Scholar] [CrossRef]
- Hussein, R.A.; Ali, A.A. Geometry of the line space associated to a given dual ruled surface. AIMS Math. 2022, 7, 8542–8557. [Google Scholar] [CrossRef]
- Harkin, A.A.; Harkin, J.B. Geometry of generalized complex numbers. Math. Mag. 2004, 77, 118–129. [Google Scholar] [CrossRef]
- Özdemir, M. Introduction to hybrid numbers. Adv. Appl. Clifford Algebr. 2018, 28, 11. [Google Scholar] [CrossRef]
- Yüce, S.; Akar, M. Dual plane and kinematics. Chiang Mai J. Sci. 2014, 41, 463–469. [Google Scholar]
- Rooney, J. Generalised complex numbers in mechanics. In Advances on Theory and Practice of Robots and Manipulators; Springer: Cham, Switzerland, 2014; pp. 55–62. [Google Scholar]
- Aragón-González, G.; Aragón, J.L.; Rodríguez-Andrade, M.A. The decomposition of an orthogonal transformation as a product of reflections. J. Math. Phys. 2006, 47, 013509. [Google Scholar] [CrossRef]
- Mackey, D.S.; Mackey, N.; Tisseur, F. G-reflectors: Analogues of householder transformations in scalar product spaces. Linear Algebra Its Appl. 2004, 385, 187–213. [Google Scholar] [CrossRef]
- Rodríguez-Andrade, M.A.; Aragón-González, G.; Aragón, J.L.; Verde-Star, L. An algorithm for the Cartan–Dieudonn’e theorem on generalized scalar product spaces. Linear Algebra Appl. 2011, 434, 1238–1254. [Google Scholar] [CrossRef]
- Gallier, J.; Xu, D. Computing exponentials of skew-symmetric matrices and logarithms of orthogonal matrices. Int. J. Robot. Autom. 2003, 1, 10–20. [Google Scholar]
- Gallier, J. Remarks on the Cayley representation of orthogonal matrices and on perturbing the diagonal of a matrix to make it invertible. arXiv 2006, arXiv:math/0606320. [Google Scholar]
- Cayley, A. Sur quelques propriétés des déterminants gauches. J. FüR Die Reine Und Angew. Math. 1846, 32, 119–123. [Google Scholar] [CrossRef]
- Erdoğdu, M.; Özdemir, M. Cayley formula in Minkowski space-time. Rep. Math. Phys. 2015, 12, 1550058. [Google Scholar] [CrossRef]
- Norris, A.N. Euler-Rodrigues and Cayley formulae for rotation of elasticity tensors. Math. Mech. Solids 2008, 13, 465–498. [Google Scholar] [CrossRef]
- Selig, J.M. Geometric Fundamentals of Robotics; Springer: NewYork, NY, USA, 2005. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).