

A Novel Method for Bearing Fault Diagnosis Based on a Parallel Deep Convolutional Neural Network


Abstract
:1. Introduction
1.1. Background and Scope
1.2. Related Works
1.3. Motivation
- (1)
- First, the current time-frequency domain analysis methods combined with deep learning algorithms exhibit limitations in capturing the spatiotemporal relationships between sampling points in input time series, which constrains the accuracy of diagnostic outcomes. Specifically, when dealing with complex and nonlinear bearing fault signals, these methods often struggle to adequately reveal the underlying structure and dynamic characteristics of the signals, thereby affecting the precision and reliability of the diagnosis.
- (2)
- Second, deep learning models tend to produce biased diagnostic results when the input time series sampling rate differs from that of the training data. This indicates a need to enhance the model’s ability to extract features and recognize patterns under varying sampling rates. Unfortunately, research addressing this issue is insufficient, and practical solutions have not yet been proposed to optimize model performance across different sampling rates.
- (3)
- Finally, the generalization capability of deep learning models poses a significant challenge. In practical applications, models often perform well on training data collected under specific load conditions. However, when the load conditions change, and the current load scenario is not included in the training set, the diagnostic accuracy decreases, highlighting the model’s limitations in adapting to different operating conditions and load variations.
1.4. Contributions
- (1)
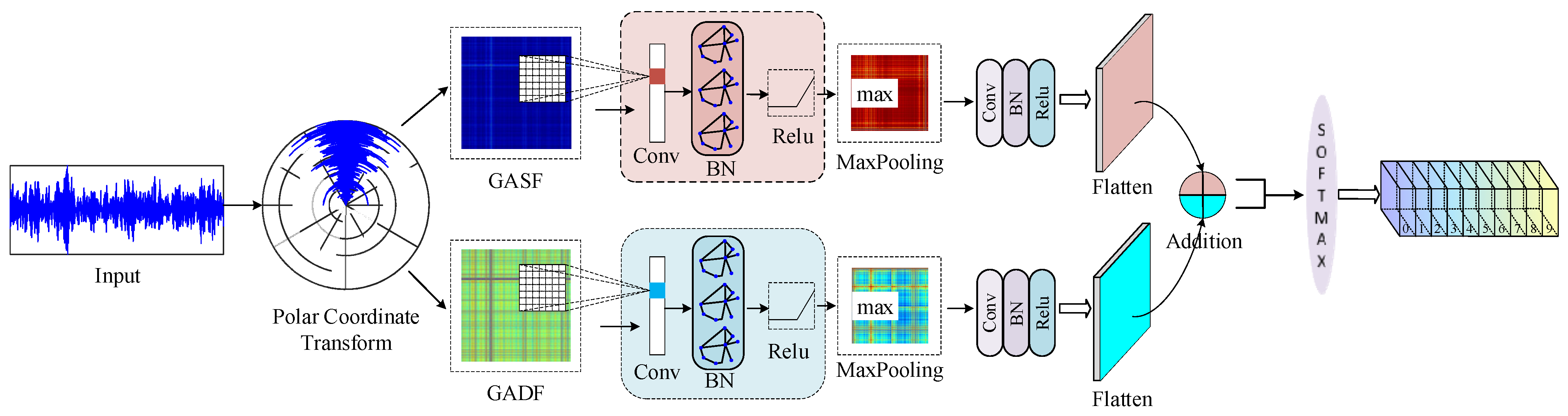
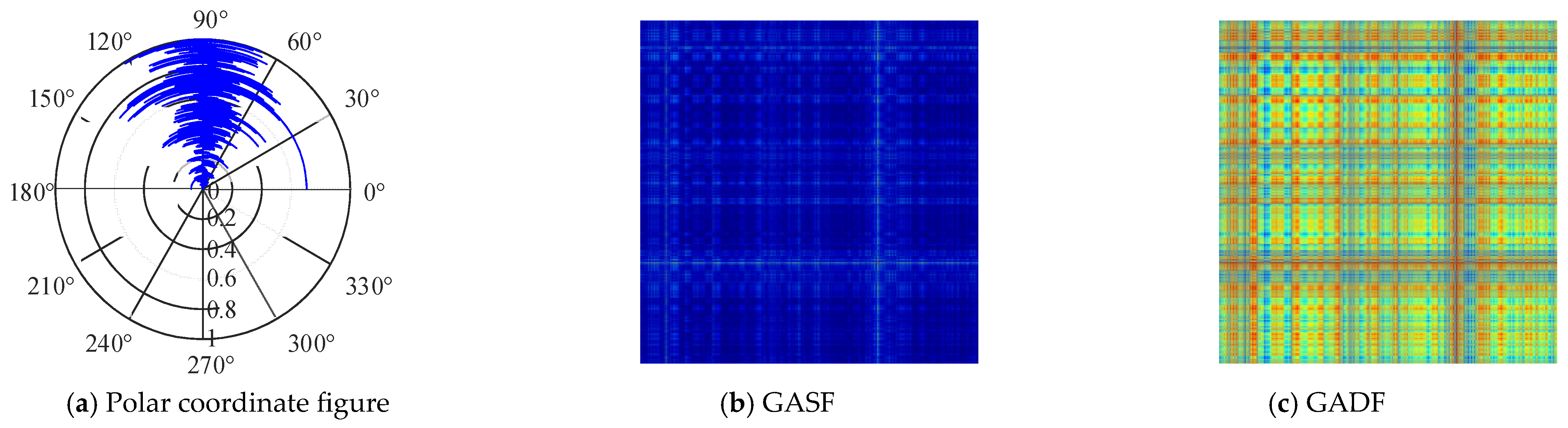
- First, we employed the GAF to convert the waveforms obtained under various bearing operating conditions at specific sampling frequencies into images, generating a set of Gramian angular summation field (GASF) and Gramian angular difference field (GADF) images through the GAF transformation. Both GASF and GADF simultaneously calculate the spatiotemporal correlations between sampled sequence points in polar coordinates, effectively mitigating common-mode and differential-mode interference in the signals.
- (2)
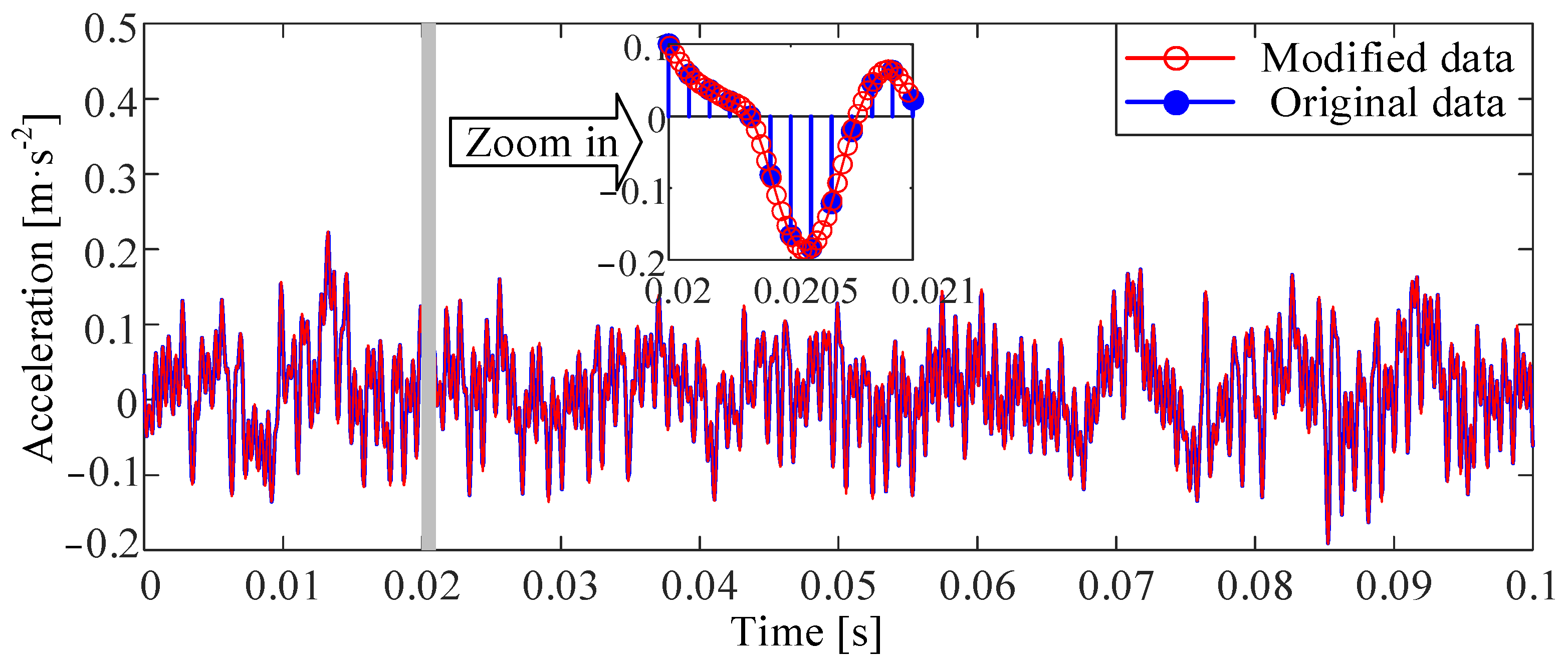
- Second, we delve into data preprocessing techniques when the sampling rate of the input time series differs from that of the training data. It introduces an upsampling method for input samples based on cubic spline interpolation, further enhancing the accuracy of diagnostic results. Detailed experimental results are provided to support this approach.
- (3)
- Finally, we present a parallel DCNN-based method for bearing fault diagnosis. Each CNN within the parallel DCNN comprises two convolutional layers designed to extract vibration patterns under different operating conditions as comprehensively as possible. These networks process the image data generated by GASF and GADF separately. An attention mechanism is then employed to fuse the features extracted by the two CNNs, culminating in a comprehensive fault diagnosis methodology. The experimental results demonstrate that this approach exhibits strong adaptability to varying load conditions.
2. Theoretical Basis and Methodology
2.1. Data Preprocessing
2.1.1. Sampling Rate Normalization
- The boundary conditions for the equality of acquired signal values are as follows:
- 2.
- The boundary conditions for the equality of the first derivatives of the acquired signals are as follows:
- 3.
- The boundary conditions for the equality of the second derivatives of the acquired signals are as follows:
2.1.2. Visualization of the Input Time Series
2.2. Fault Diagnosis Based on a Parallel Deep Convolutional Neural Network
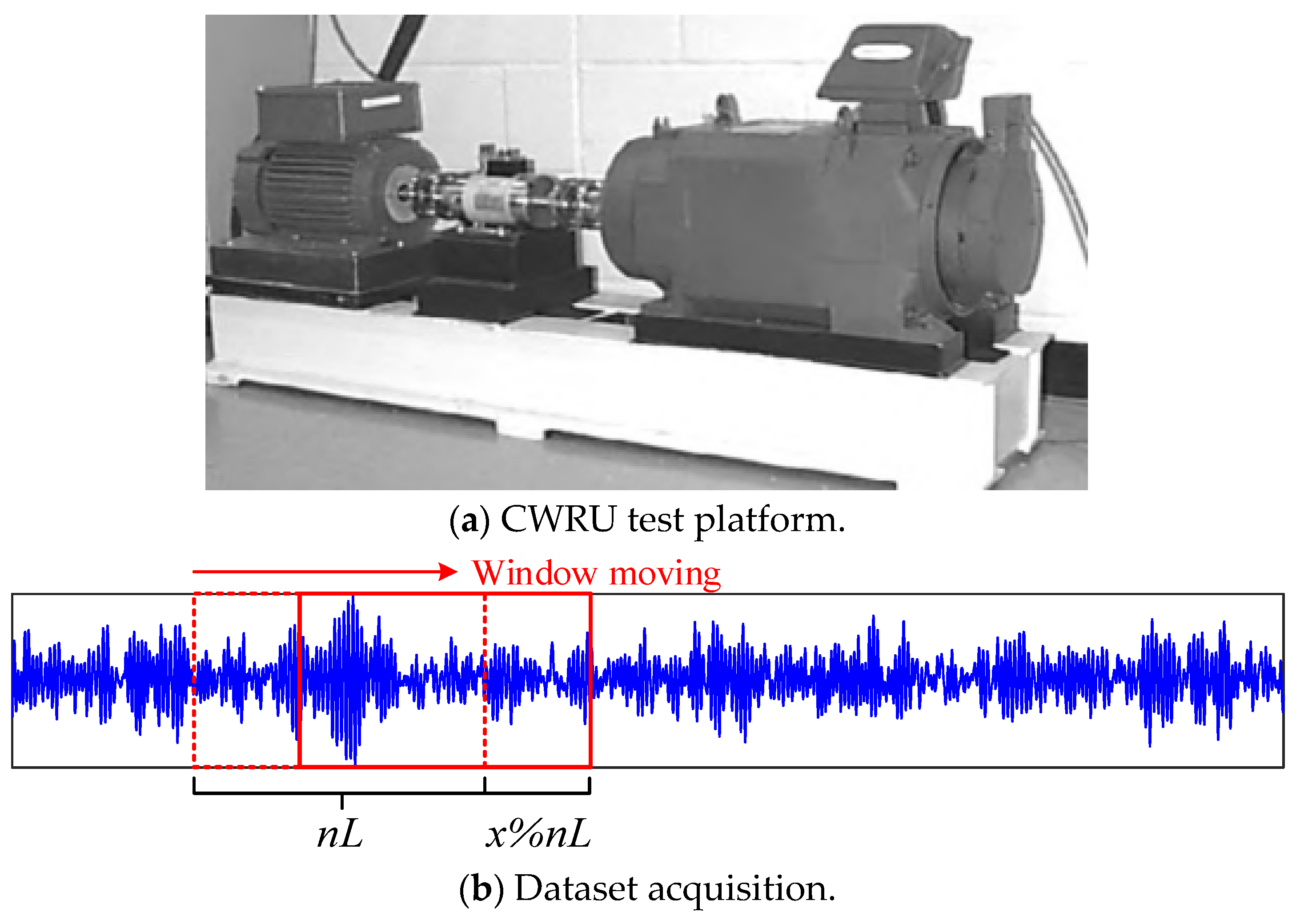
2.2.1. Selection Principle for the Input Data Length
2.2.2. Structure and Parameter Determination of the Parallel DCNN
2.2.3. Methodology
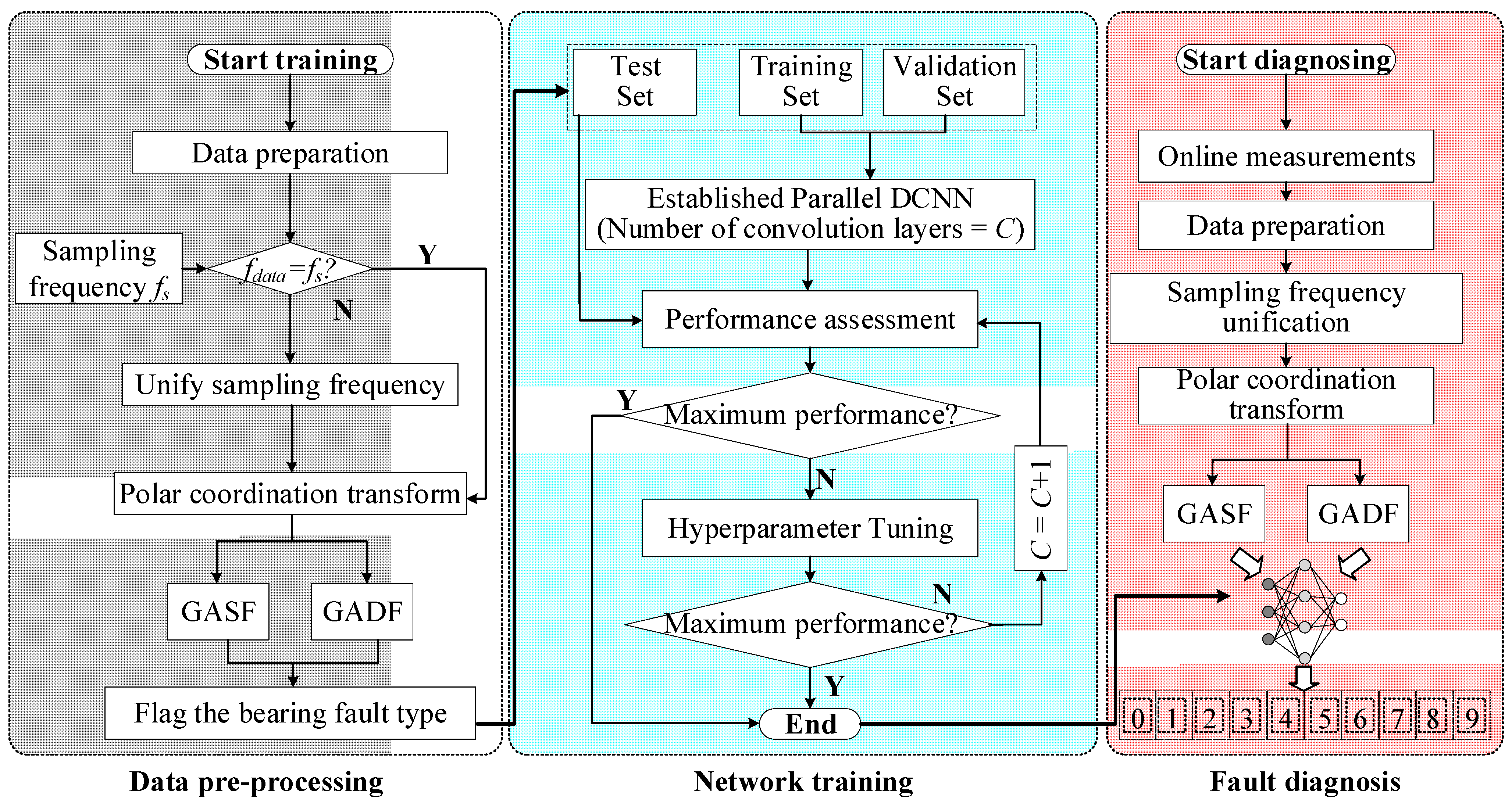
- Data preprocessing: Obtain the bearing fault waveforms and specify the sampling rate for the waveforms used in training. If a portion of the waveforms in the training samples has a different sampling rate from the others, the method described in this paper is employed to perform upsampling using cubic spline interpolation. Following polar coordinate transformation, the vibration signal sample set undergoes GAF transformation, converting the one-dimensional time series data into two-dimensional GASF and GADF images. These training samples are then labeled according to their operational conditions using the method outlined in Table 1 to distinguish between different abnormal or normal states.
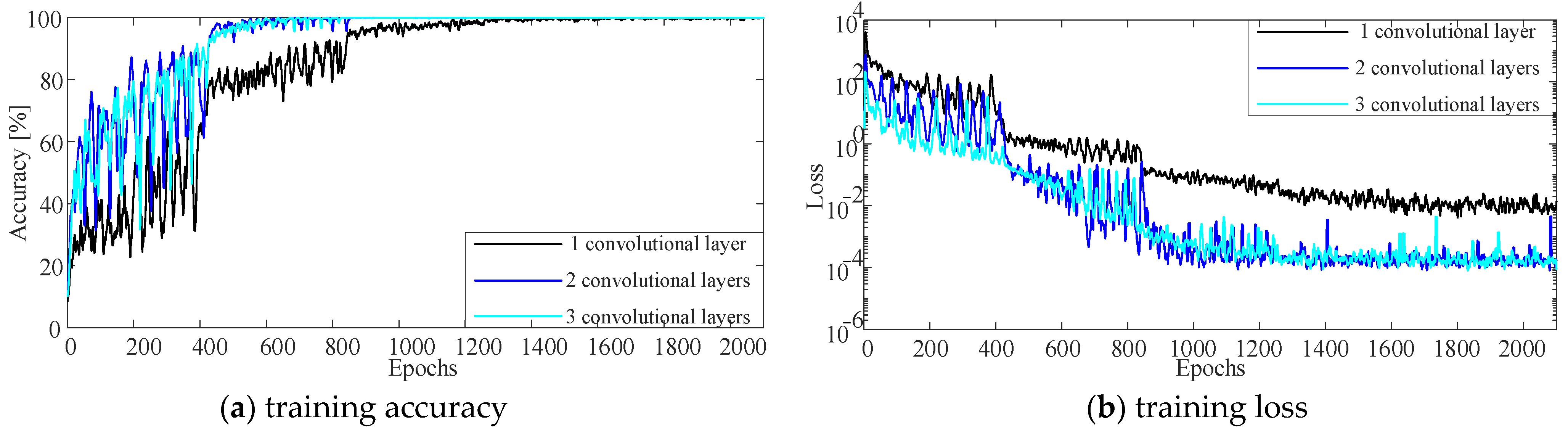
- Network training and validation: The labeled image data are divided into training, validation, and test sets. The parallel DCNN model is used for training, and the model’s performance is validated using the validation set during each iteration. When the model meets the preset convergence criteria, the model parameters are saved. Notably, if satisfactory performance cannot be achieved or training does not converge despite hyperparameter adjustments, the number of convolutional layers is increased by 1, and the hyperparameter adjustment process is repeated until satisfactory diagnostic performance is obtained.
- Fault diagnosis: During the actual operation of the system, the vibration signals of the bearings are collected in real-time. After adjusting the sampling rate and undergoing polar coordinate transformation, the GASF and GADF images are generated. These images are then input into the trained model to monitor the operational health status of the bearings in real-time.

3. Results
4. Validation
4.1. The Necessity of Sampling Frequency Unification
4.2. Comparison with Existing Methods
- Frequency-domain features: This entails the application of EEMD to decompose the vibration signals of rolling bearings into nine distinct modes. Subsequently, the first five IMFs and four residual components are extracted. Hilbert transforms are then performed on each IMF to generate five envelope spectra, each with a data length of 4800. These spectra are concatenated to form a comprehensive feature vector, which is then fed into the SVM for training and classification.
- Time-domain features: The raw time-domain signals, with a length of 4800, are directly fed into the SVM for training and classification without any intermediate transformations or decompositions.
5. Discussions
6. Conclusions
- (1)
- A method for selecting the time window of input signals is proposed based on the characteristic frequencies of vibration signals associated with different fault modes. By utilizing a 0.1-s time window, the input signals effectively capture a wide range of characteristic frequencies.
- (2)
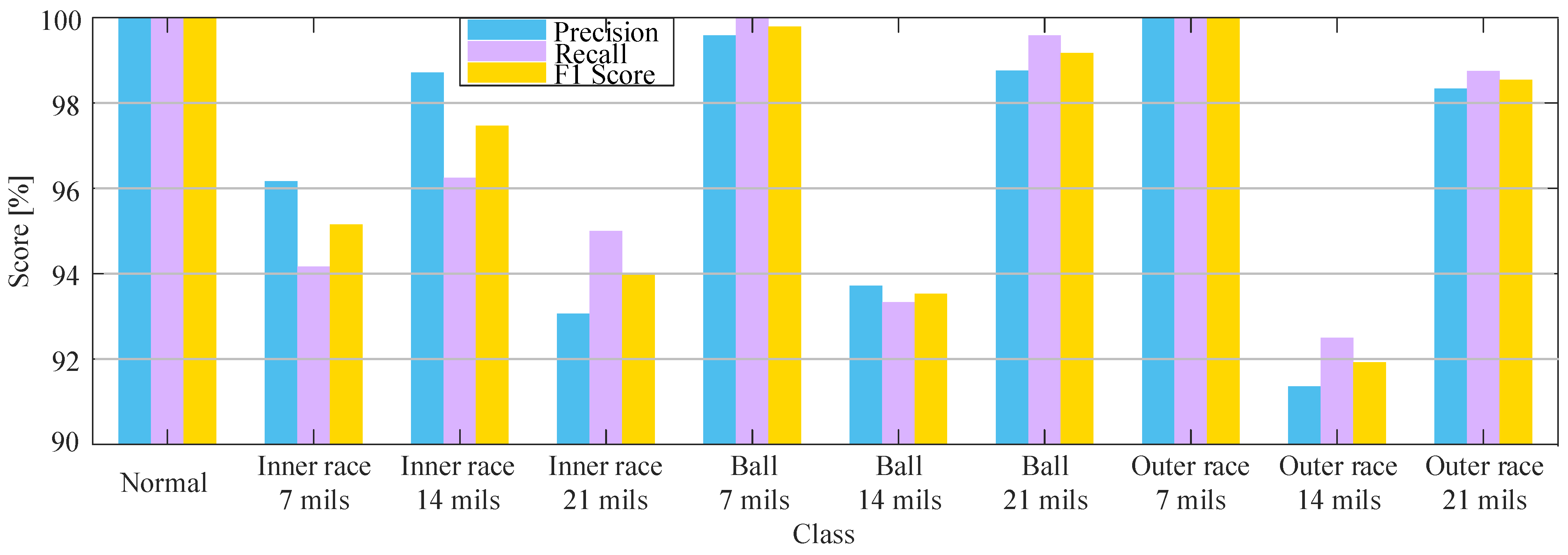
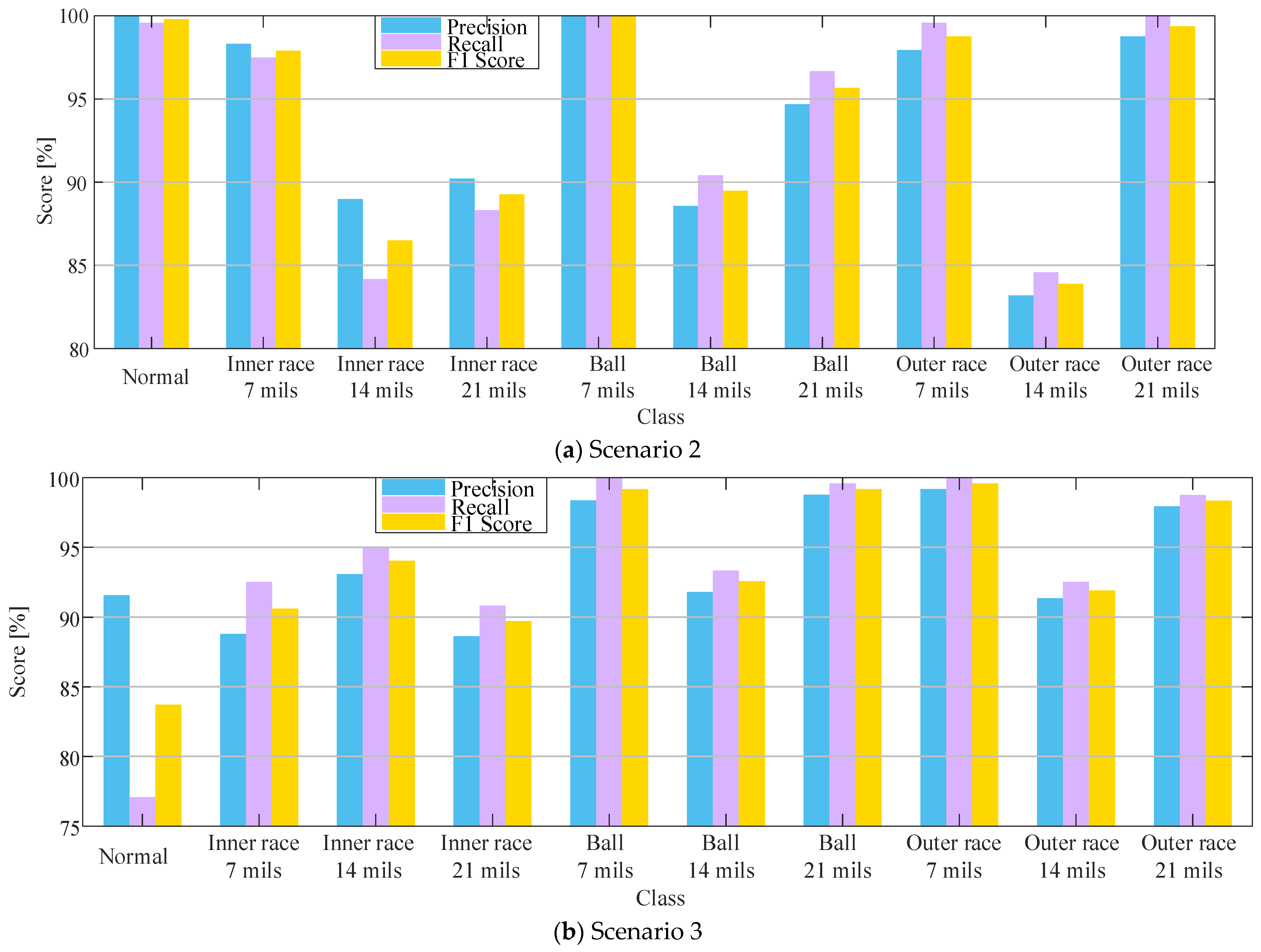
- With the GAF transform, one-dimensional time series are transformed into two distinct image representations: the GASF and the GADF. These images are subsequently used as inputs for two parallel DCNN channels. An attention mechanism is employed to merge the outputs effectively. In the absence of training data within the test set, the proposed method achieves remarkable performance, with accuracy rates ranging from 91.36% to 100%, recall rates between 92.50% and 100%, and F1 scores varying from 91.93% to 100%. Overall, the method achieves a remarkable 96.96% improvement.
- (3)
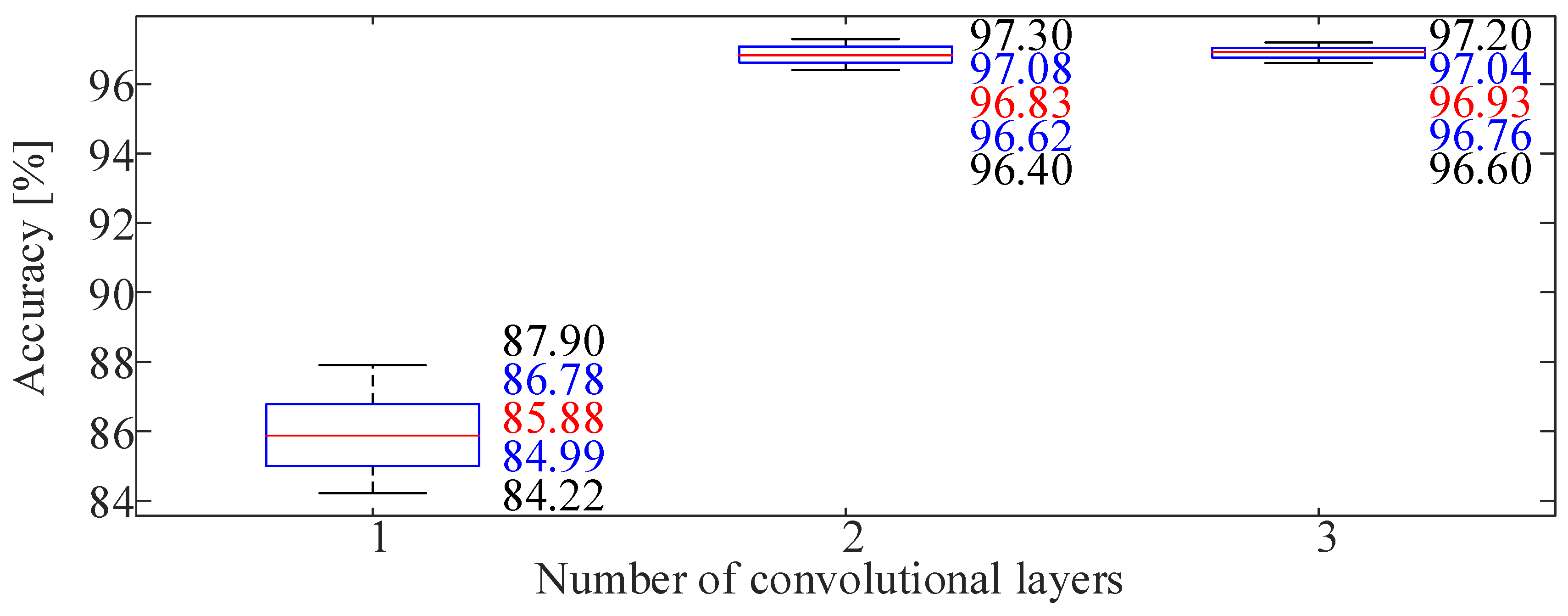
- This paper further investigates the impact of different network structures on key performance metrics. The results reveal that using two convolutional layers are sufficient to provide robust fault diagnosis capabilities. Specifically, in scenarios involving large sample sizes and repetitive trials, the median accuracy reaches 96.83%, significantly surpassing the 85.88% achieved with one convolutional layer. Further, increasing the number of convolutional layers does not result in additional improvements.
- (4)
- The necessity of unifying the sampling rate is examined using the control variable method. Feeding time series data obtained at different sampling rates into a trained model can decrease the fault identification accuracy to approximately 94%. Such degradation can be partly solved according to this study. Challenges remain when the model’s sampling rate is not an integer multiple of the input data’s rate.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, S.; Chen, X.; Tong, C.; Zhao, Z. Matching synchrosqueezing wavelet transform and application to aeroengine vibration monitoring. IEEE Trans. Instrum. Meas. 2016, 66, 360–372. [Google Scholar] [CrossRef]
- Wang, S.; Chen, X.; Selesnick, I.W.; Guo, Y.; Tong, C.; Zhang, X. Matching synchrosqueezing transform: A useful tool for characterizing signals with fast varying instantaneous frequency and application to machine fault diagnosis. Mech. Syst. Signal Proc. 2018, 100, 242–288. [Google Scholar] [CrossRef]
- Yu, G.; Lin, T.R. Second-order transient-extracting transform for the analysis of impulsive-like signals. Mech. Syst. Signal Proc. 2021, 147, 107069. [Google Scholar] [CrossRef]
- Geetha, G.; Geethanjali, P. An efficient method for bearing fault diagnosis. Syst. Sci. Control Eng. 2024, 12, 2329264. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Roy, A.; Doherty, J.F. Raised cosine filter-based empirical mode decomposition. IET Signal Process. 2011, 5, 121–129. [Google Scholar] [CrossRef]
- Soman, A.; Sarath, R. Optimization-enabled deep convolutional neural network with multiple features for cardiac arrhythmia classification using ECG signals. Biomed. Signal Process. Control 2024, 92, 105964. [Google Scholar] [CrossRef]
- Del E Chelle, E.; Lemoine, J.; Niang, O. Empirical mode decomposition: An analytical approach for sifting process. IEEE Signal Process. Lett. 2005, 12, 764–767. [Google Scholar] [CrossRef]
- Myat, A.; Kondath, N.; Soh, Y.L.; Hui, A. A hybrid model based on multivariate fast iterative filtering and long short-term memory for ultra-short-term cooling load prediction. Energy Build. 2024, 307, 113977. [Google Scholar] [CrossRef]
- Cicone, A.; Liu, J.; Zhou, H. Adaptive local iterative filtering for signal decomposition and instantaneous frequency analysis. Appl. Comput. Harmon. Anal. 2016, 41, 384–411. [Google Scholar] [CrossRef]
- Guo, B.; Peng, S.; Hu, X.; Xu, P. Complex-valued differential operator-based method for multi-component signal separation. Signal Process. 2017, 132, 66–76. [Google Scholar] [CrossRef]
- Dubey, R.; Sharma, R.R.; Upadhyay, A.; Pachori, R.B. Automated Variational Nonlinear Chirp Mode Decomposition for Bearing Fault Diagnosis. IEEE Trans. Ind. Inform. 2023, 19, 10873–10882. [Google Scholar] [CrossRef]
- Chen, S.; Yang, Y.; Peng, Z.; Dong, X.; Zhang, W.; Meng, G. Adaptive chirp mode pursuit: Algorithm and applications. Mech. Syst. Signal Proc. 2019, 116, 566–584. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Xing, G.; Peng, Z.; Zhang, W.; Meng, G. Separation of overlapped non-stationary signals by ridge path regrouping and intrinsic chirp component decomposition. IEEE Sens. J. 2017, 17, 5994–6005. [Google Scholar] [CrossRef]
- Dong, X.; Chen, S.; Xing, G.; Peng, Z.; Zhang, W.; Meng, G. Doppler frequency estimation by parameterized time-frequency transform and phase compensation technique. IEEE Sens. J. 2018, 18, 3734–3744. [Google Scholar] [CrossRef]
- Guo, W.; Jiang, X.; Li, N.; Shi, J.; Zhu, Z. A coarse TF ridge-guided multi-band feature extraction method for bearing fault diagnosis under varying speed conditions. IEEE Access 2019, 7, 18293–18310. [Google Scholar] [CrossRef]
- Tamilselvan, P.; Wang, P. Failure diagnosis using deep belief learning based health state classification. Reliab. Eng. Syst. Saf. 2013, 115, 124–135. [Google Scholar] [CrossRef]
- Yang, Y.; Peng, Z.K.; Dong, X.J.; Zhang, W.M.; Meng, G. General parameterized time-frequency transform. IEEE Trans. Signal Process. 2014, 62, 2751–2764. [Google Scholar] [CrossRef]
- Li, X.; Bi, G.; Stankovic, S.; Zoubir, A.M. Local polynomial Fourier transform: A review on recent developments and applications. Signal Process. 2011, 91, 1370–1393. [Google Scholar] [CrossRef]
- Peng, Z.K.; Meng, G.; Chu, F.L.; Lang, Z.; Zhang, W.M.; Yang, Y. Polynomial chirplet transform with application to instantaneous frequency estimation. IEEE Trans. Instrum. Meas. 2011, 60, 3222–3229. [Google Scholar] [CrossRef]
- Yu, G. A concentrated time--frequency analysis tool for bearing fault diagnosis. IEEE Trans. Instrum. Meas. 2019, 69, 371–381. [Google Scholar] [CrossRef]
- Yu, G.; Wang, Z.; Zhao, P.; Li, Z. Local maximum synchrosqueezing transform: An energy-concentrated time-frequency analysis tool. Mech. Syst. Signal Proc. 2019, 117, 537–552. [Google Scholar] [CrossRef]
- Xu, G.; Liu, M.; Jiang, Z.; S O Ffker, D.; Shen, W. Bearing fault diagnosis method based on deep convolutional neural network and random forest ensemble learning. Sensors 2019, 19, 1088. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Chen, L.; Shen, C. Hierarchical adaptive deep convolution neural network and its application to bearing fault diagnosis. Measurement 2016, 93, 490–502. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef]
- Hoang, D.; Kang, H. A survey on deep learning based bearing fault diagnosis. Neurocomputing 2019, 335, 327–335. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ding, Q.; Sun, J. Intelligent rotating machinery fault diagnosis based on deep learning using data augmentation. J. Intell. Manuf. 2020, 31, 433–452. [Google Scholar] [CrossRef]
- Biswas, S.; Panigrahi, B.K.; Nayak, P.K.; Pradhan, G.; Padmanaban, S. A Single-Pole Filter Assisted Improved Protection Scheme for the TCSC Compensated Transmission Line Connecting Large-Scale Wind Farms. IEEE J. Emerg. Sel. Top. Ind. Electron. 2023, 1–13. [Google Scholar] [CrossRef]
- Biswas, S.; Nayak, P.K.; Panigrahi, B.K.; Pradhan, G. An intelligent fault detection and classification technique based on variational mode decomposition-CNN for transmission lines installed with UPFC and wind farm. Electr. Power Syst. Res. 2023, 223, 109526. [Google Scholar] [CrossRef]
- Romano, D.; Kovacevic-Badstuebner, I.; Antonini, G.; Grossner, U. Accelerated Evaluation of Quasi-Static Interaction Integrals via Cubic Spline Interpolation in the Framework of the PEEC Method. IEEE Trans. Electromagn. Compat. 2024, 1–8. [Google Scholar] [CrossRef]
- Li, S.; Jia, J. A Cost-Efficient Numerical Algorithm for Evaluating the Determinant of a Quasi-Tridiagonal Matrix. In Proceedings of the 2018 5th International Conference on Systems and Informatics (ICSAI), Nanjing, China, 10–12 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 593–597. [Google Scholar]
- Wang, Z.; Oates, T. Imaging time-series to improve classification and imputation. arXiv 2015, arXiv:1506.00327. [Google Scholar]
- Wu, D.; Wang, J.; Wang, H.; Liu, H.; Lai, L.; He, T.; Xie, T. An automatic bearing fault diagnosis method based on characteristics frequency ratio. Sensors 2020, 20, 1519. [Google Scholar] [CrossRef]
- Neupane, D.; Seok, J. Bearing fault detection and diagnosis using case western reserve university dataset with deep learning approaches: A review. IEEE Access 2020, 8, 93155–93178. [Google Scholar] [CrossRef]
- Case Western Reserve University Bearing Data Center. Available online: https://csegroups.case.edu/bearingdatacenter/home (accessed on 22 December 2019).
- Thévenaz, P. Image Interpolation and Resampling. In Handbook of Medical Imaging; Academic Press: San Diego, CA, USA, 2000. [Google Scholar]
- Kang, S.; Ma, D.; Wang, Y.; Lan, C.; Chen, Q.; Mikulovich, V.I. Method of assessing the state of a rolling bearing based on the relative compensation distance of multiple-domain features and locally linear embedding. Mech. Syst. Signal Proc. 2017, 86, 40–57. [Google Scholar] [CrossRef]
- Chang, C.; Lin, C. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 21–27. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flag | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|---|
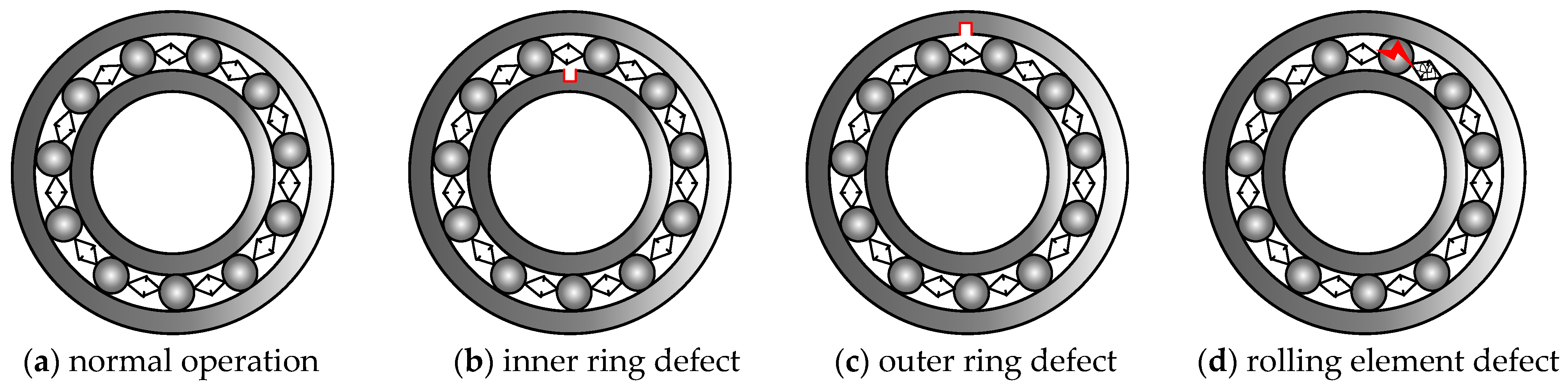
| Fault element | N.A. | Inner race | Inner race | Inner race | Ball | Ball | Ball | Outer race | Outer race | Outer race |
| Fault level [mils] | N.A. | 7 | 14 | 21 | 7 | 14 | 21 | 7 | 14 | 21 |
| Test Flag | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Real Flag | |||||||||||
| 0 | 240 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1 | 0 | 226 | 0 | 3 | 0 | 0 | 0 | 0 | 11 | 0 | |
| 2 | 0 | 0 | 231 | 1 | 0 | 3 | 0 | 0 | 4 | 1 | |
| 3 | 0 | 0 | 0 | 228 | 0 | 8 | 3 | 0 | 1 | 0 | |
| 4 | 0 | 0 | 0 | 0 | 240 | 0 | 0 | 0 | 0 | 0 | |
| 5 | 0 | 0 | 2 | 5 | 1 | 224 | 0 | 0 | 5 | 3 | |
| 6 | 0 | 0 | 0 | 1 | 0 | 0 | 239 | 0 | 0 | 0 | |
| 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 240 | 0 | 0 | |
| 8 | 0 | 9 | 1 | 7 | 0 | 1 | 0 | 0 | 222 | 0 | |
| 9 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 237 | |
| Flag | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Fault element | N.A. | Inner race | Inner race | Inner race | Ball | Ball | Ball | Outer race | Outer race | Outer race | |
| Fault level [mils] | N.A. | 7 | 14 | 21 | 7 | 14 | 21 | 7 | 14 | 21 | |
| Scenario 1 | Number of | 240 | 240 | 240 | 240 | 240 | 240 | 240 | 240 | 240 | 240 |
| Training sampling frequency = 48 kHz | Samples | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) |
| Scenario 2 | Number of | 240 | 240 | 240 | 240 | 240 | 240 | 240 | 240 | 240 | 240 |
| Training sampling frequency = 12 kHz | Samples | (12 kHz) | (12 kHz) | (12 kHz) | (12 kHz) | (12 kHz) | (12 kHz) | (12 kHz) | (12 kHz) | (12 kHz) | (12 kHz) |
| Scenario 3 | Number of | 240 | 240 | 240 | 240 | 240 | 240 | 240 | 240 | 240 | 240 |
| Training sampling frequency = 48 kHz | Samples | (12 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) | (48 kHz) |
| Test Flag | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Real Flag | |||||||||||
| 0 | 239 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1 | 0 | 234 | 0 | 1 | 0 | 4 | 0 | 0 | 1 | 0 | |
| 2 | 0 | 1 | 202 | 0 | 0 | 13 | 0 | 0 | 23 | 1 | |
| 3 | 0 | 0 | 3 | 212 | 0 | 4 | 7 | 1 | 13 | 0 | |
| 4 | 0 | 0 | 0 | 0 | 240 | 0 | 0 | 0 | 0 | 0 | |
| 5 | 0 | 0 | 14 | 4 | 0 | 217 | 1 | 0 | 3 | 1 | |
| 6 | 0 | 0 | 2 | 1 | 0 | 3 | 232 | 0 | 1 | 1 | |
| 7 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 239 | 0 | 0 | |
| 8 | 0 | 2 | 6 | 16 | 0 | 4 | 5 | 4 | 203 | 0 | |
| 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 240 | |
| Test Flag | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Real Flag | |||||||||||
| 0 | 185 | 19 | 14 | 11 | 3 | 5 | 0 | 2 | 0 | 1 | |
| 1 | 4 | 222 | 0 | 3 | 0 | 0 | 0 | 0 | 11 | 0 | |
| 2 | 3 | 0 | 228 | 1 | 0 | 3 | 0 | 0 | 4 | 1 | |
| 3 | 10 | 0 | 0 | 218 | 0 | 8 | 3 | 0 | 1 | 0 | |
| 4 | 0 | 0 | 0 | 0 | 240 | 0 | 0 | 0 | 0 | 0 | |
| 5 | 0 | 0 | 2 | 5 | 1 | 224 | 0 | 0 | 5 | 3 | |
| 6 | 0 | 0 | 0 | 1 | 0 | 0 | 239 | 0 | 0 | 0 | |
| 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 240 | 0 | 0 | |
| 8 | 0 | 9 | 1 | 7 | 0 | 1 | 0 | 0 | 222 | 0 | |
| 9 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 237 | |
| Test Flag | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Real Flag | |||||||||||
| Method | |||||||||||
| 0 | (1) | 240 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| (2) | 240 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1 | (1) | 0 | 240 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| (2) | 184 | 56 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 2 | (1) | 13 | 73 | 143 | 5 | 1 | 1 | 0 | 0 | 4 | 0 |
| (2) | 220 | 15 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 3 | (1) | 0 | 156 | 0 | 78 | 0 | 0 | 3 | 0 | 3 | 0 |
| (2) | 168 | 7 | 0 | 0 | 0 | 0 | 1 | 0 | 64 | 0 | |
| 4 | (1) | 0 | 0 | 0 | 0 | 167 | 0 | 0 | 0 | 0 | 73 |
| (2) | 154 | 65 | 4 | 0 | 17 | 0 | 0 | 0 | 0 | 0 | |
| 5 | (1) | 0 | 231 | 0 | 2 | 0 | 0 | 0 | 6 | 1 | 0 |
| (2) | 205 | 29 | 0 | 0 | 0 | 6 | 0 | 0 | 0 | 0 | |
| 6 | (1) | 0 | 0 | 0 | 48 | 3 | 0 | 188 | 0 | 0 | 1 |
| (2) | 201 | 25 | 5 | 0 | 0 | 0 | 4 | 0 | 0 | 5 | |
| 7 | (1) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 240 | 0 | 0 |
| (2) | 48 | 35 | 11 | 0 | 0 | 0 | 16 | 54 | 0 | 76 | |
| 8 | (1) | 0 | 183 | 0 | 0 | 0 | 0 | 0 | 0 | 57 | 0 |
| (2) | 183 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 57 | 0 | |
| 9 | (1) | 0 | 0 | 0 | 0 | 27 | 0 | 0 | 0 | 0 | 213 |
| (2) | 117 | 77 | 34 | 0 | 0 | 0 | 0 | 0 | 0 | 12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Z.; Wang, Y.; Guo, Y.; Tong, X.; Wei, F.; Tong, N. A Novel Method for Bearing Fault Diagnosis Based on a Parallel Deep Convolutional Neural Network. Symmetry 2024, 16, 432. https://doi.org/10.3390/sym16040432
Lin Z, Wang Y, Guo Y, Tong X, Wei F, Tong N. A Novel Method for Bearing Fault Diagnosis Based on a Parallel Deep Convolutional Neural Network. Symmetry. 2024; 16(4):432. https://doi.org/10.3390/sym16040432
Chicago/Turabian StyleLin, Zhuonan, Yongxing Wang, Yining Guo, Xiangrui Tong, Fanrong Wei, and Ning Tong. 2024. "A Novel Method for Bearing Fault Diagnosis Based on a Parallel Deep Convolutional Neural Network" Symmetry 16, no. 4: 432. https://doi.org/10.3390/sym16040432