


Simpson’s Variational Integrator for Systems with Quadratic Lagrangians


Abstract
:1. Introduction
2. Newmark’s Scheme
2.1. Discrete Action
2.2. Discrete Euler–Lagrange Equations
2.3. Newmark’s Scheme
3. Simpson’s Scheme
3.1. Quadratic Finite-Element Interpolation
3.2. Discrete Lagrangian
3.3. Discrete Euler–Lagrange Equations
3.4. First Variant of Simpson’s Scheme
3.5. Second Variant of Simpson’s Scheme
4. Symplecticity of Newmark’s and Simpson’s Schemes
4.1. Symplectic Property
4.2. Symplectic Property of Newmark’s Scheme
4.3. Symplectic Property of Simpson’s Scheme
4.4. Conservation of a Discrete Quadratic Form
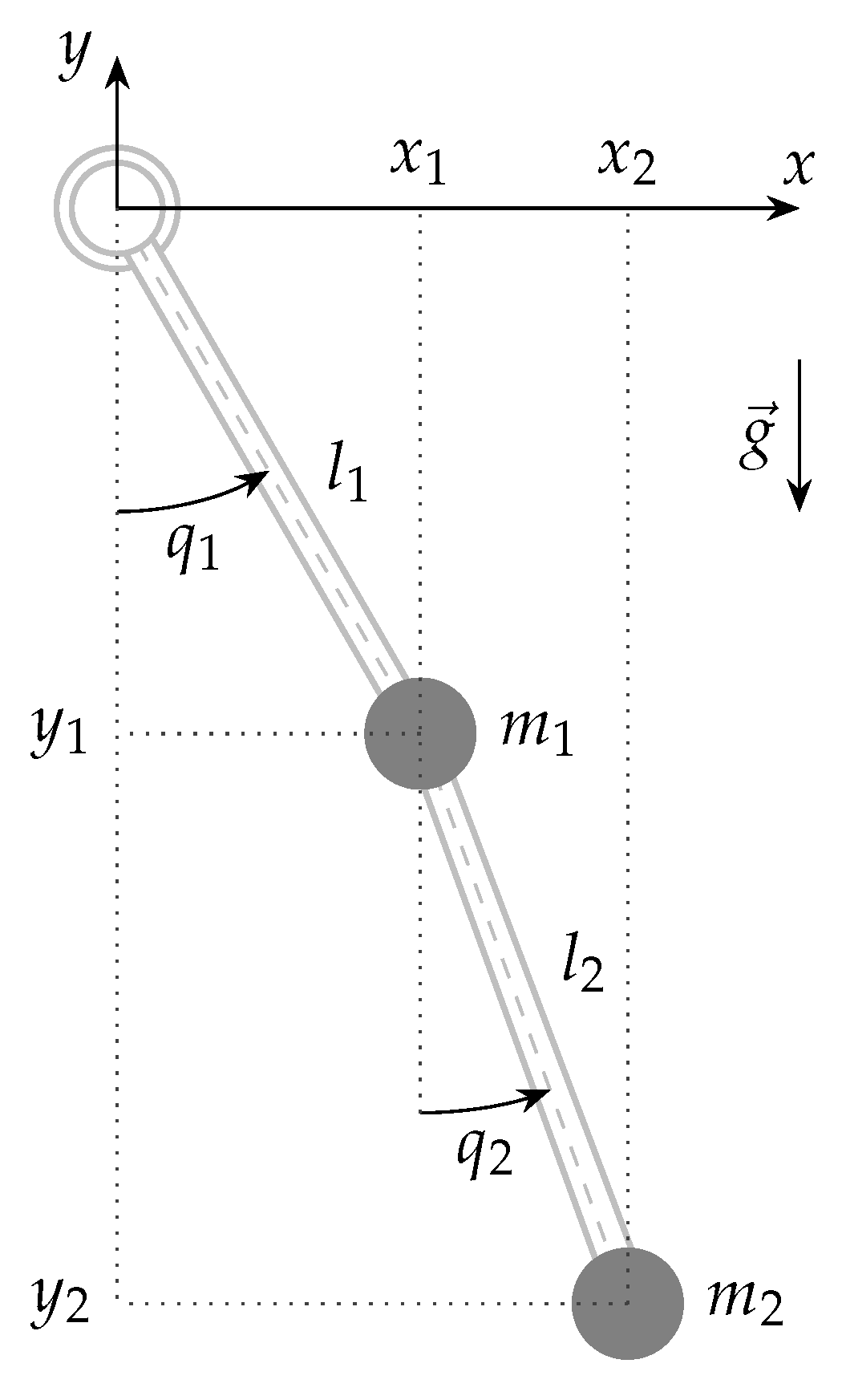
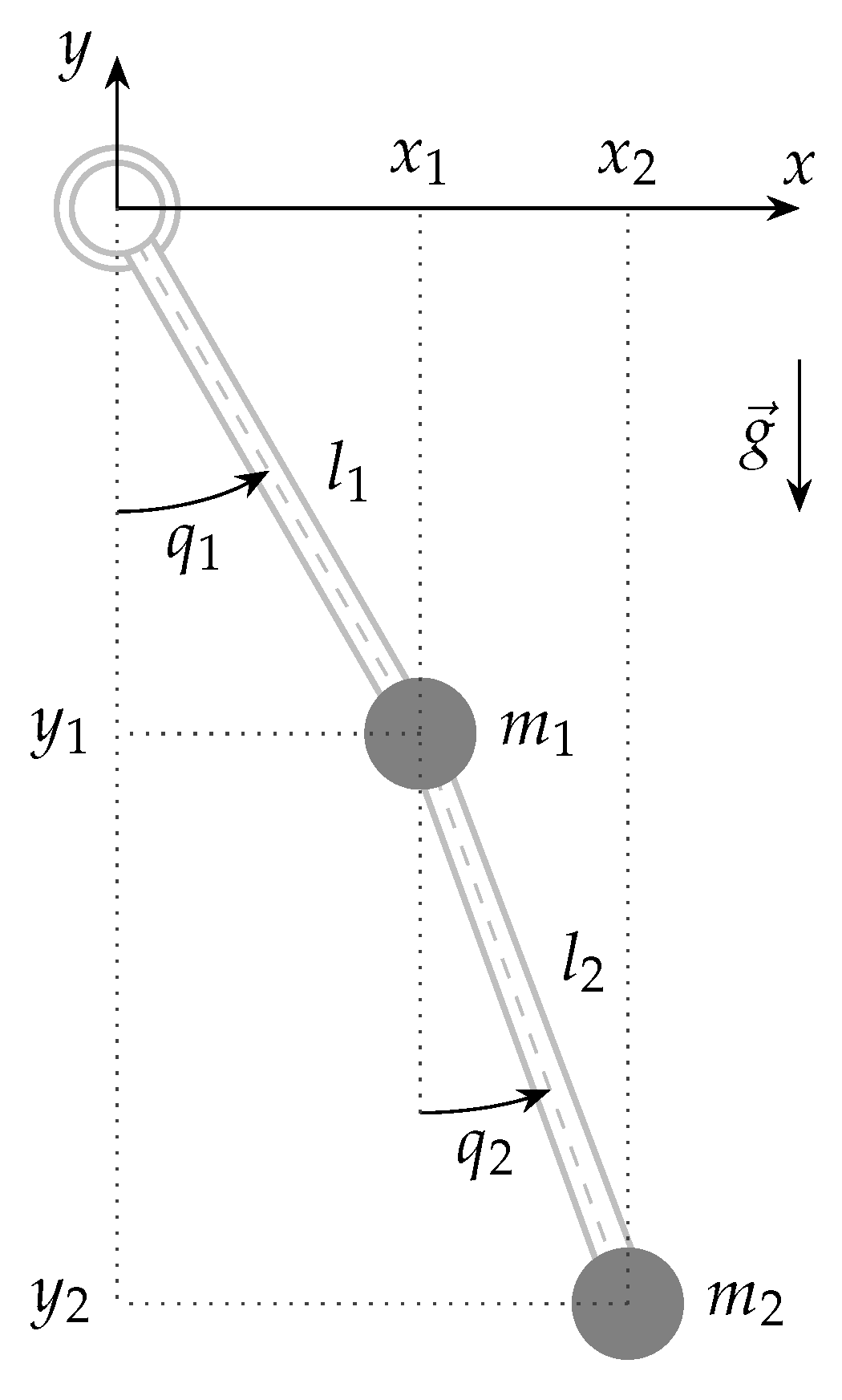
5. Linear Double Pendulum Model and Exact Solution
5.1. Lagrangian
5.2. Exact Solution
6. Simulation Results
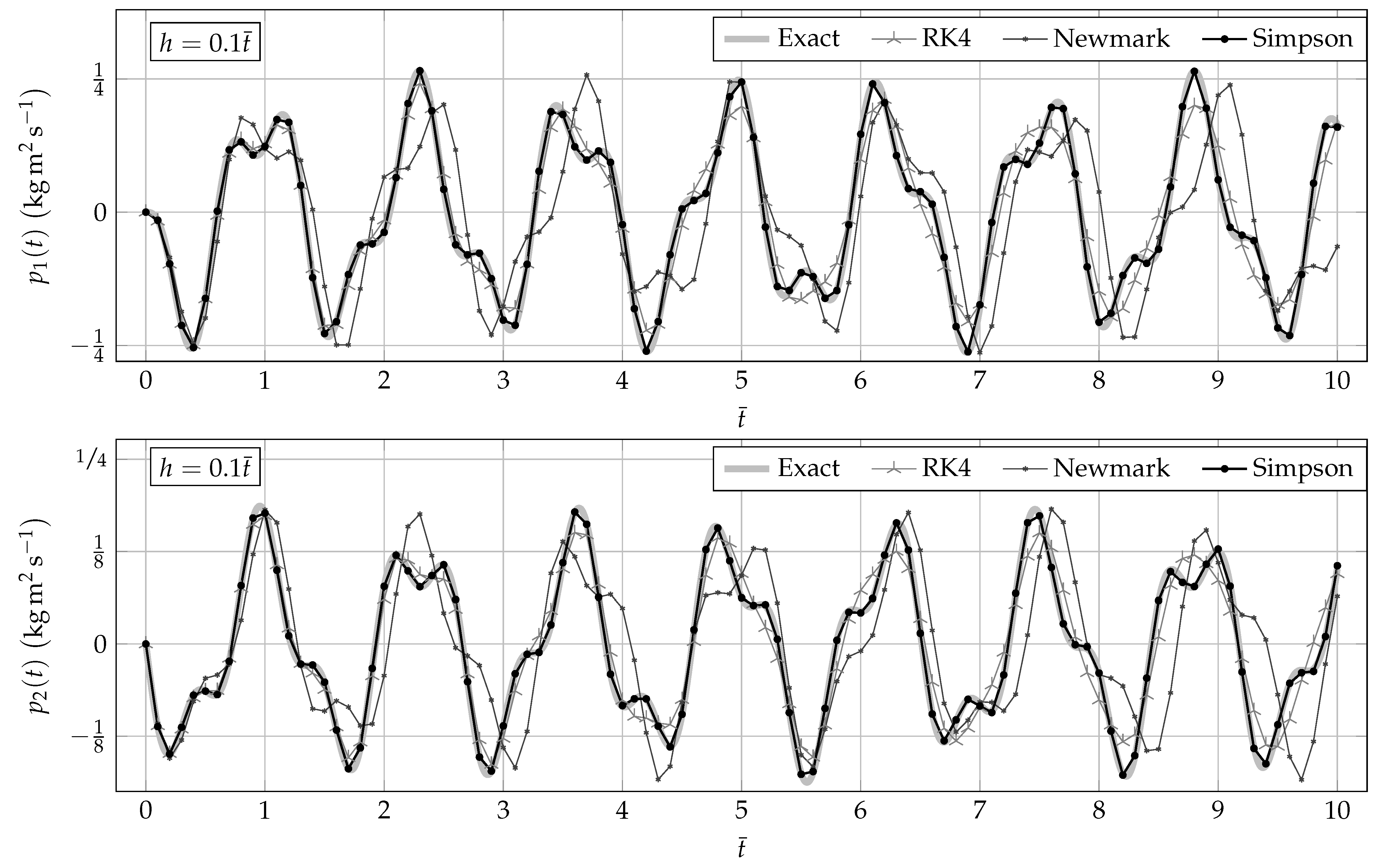
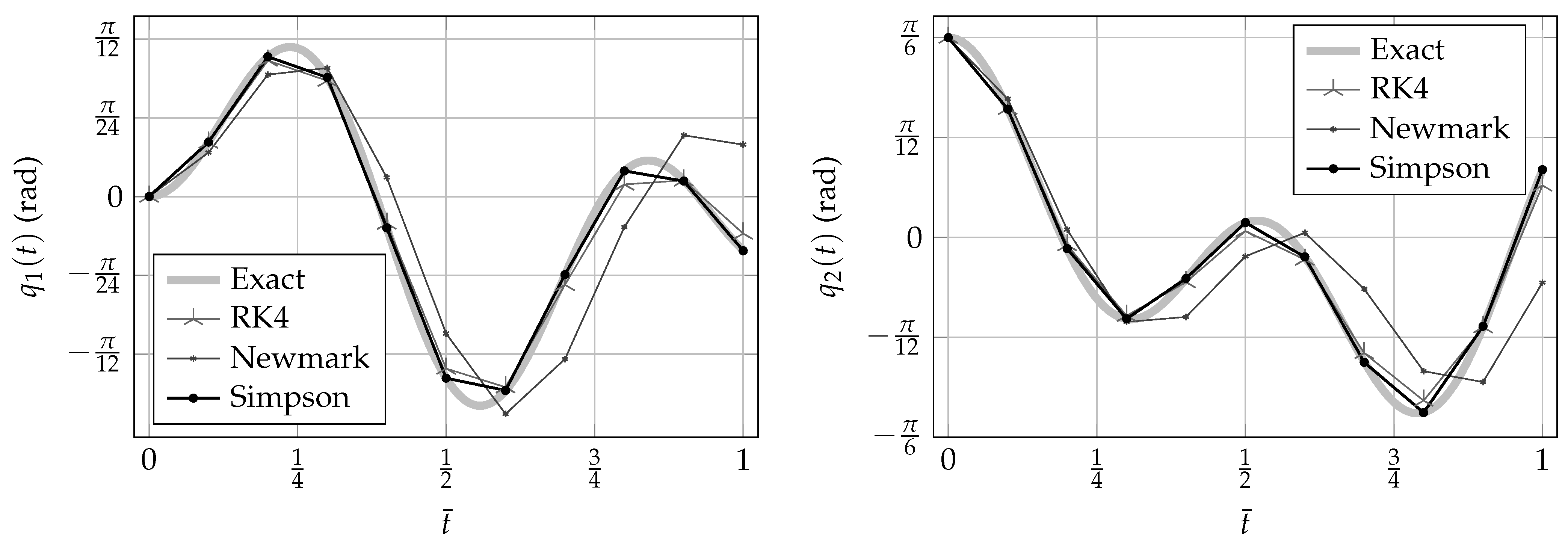
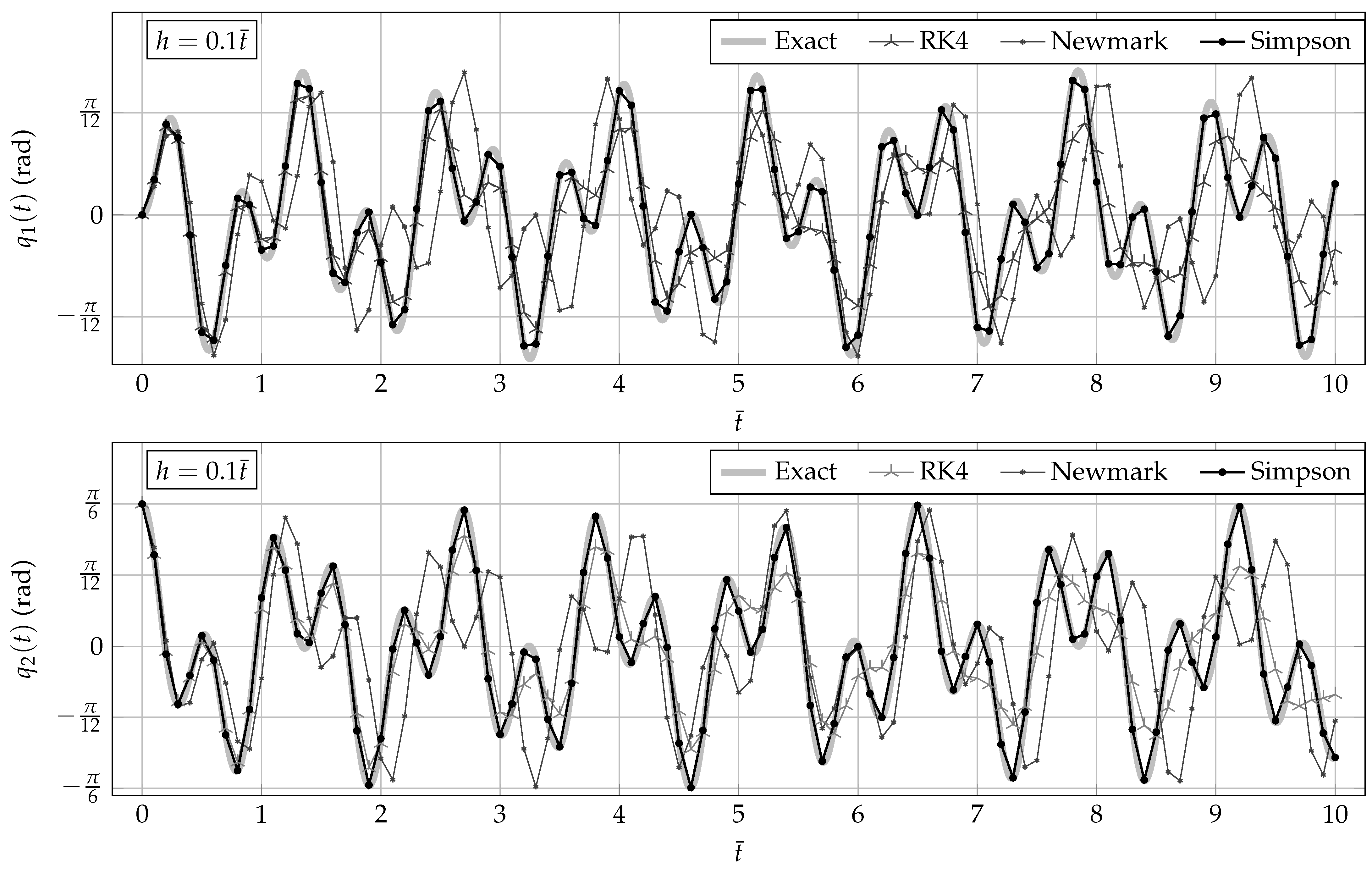
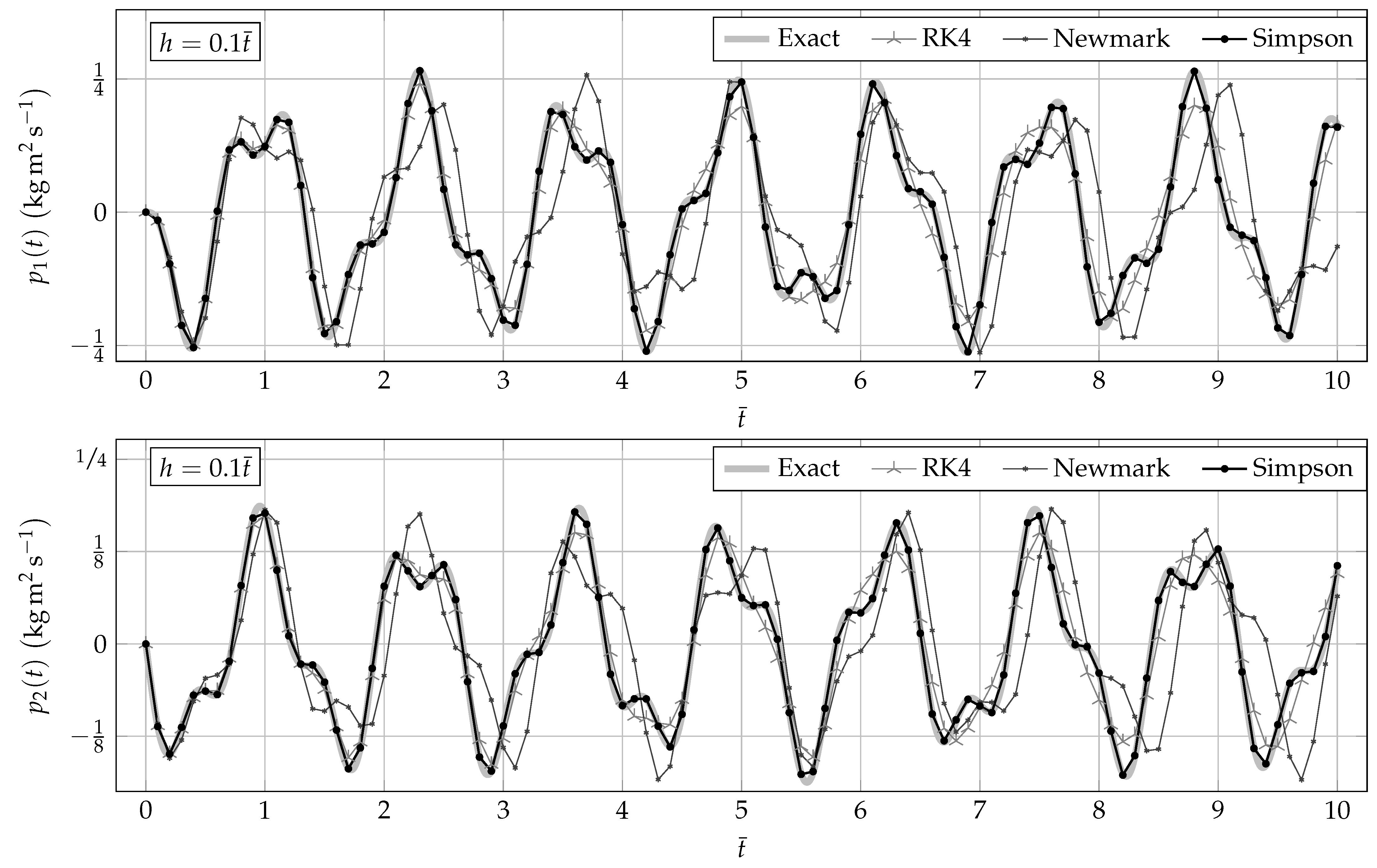
6.1. Configuration Parameters and Generalized Momenta
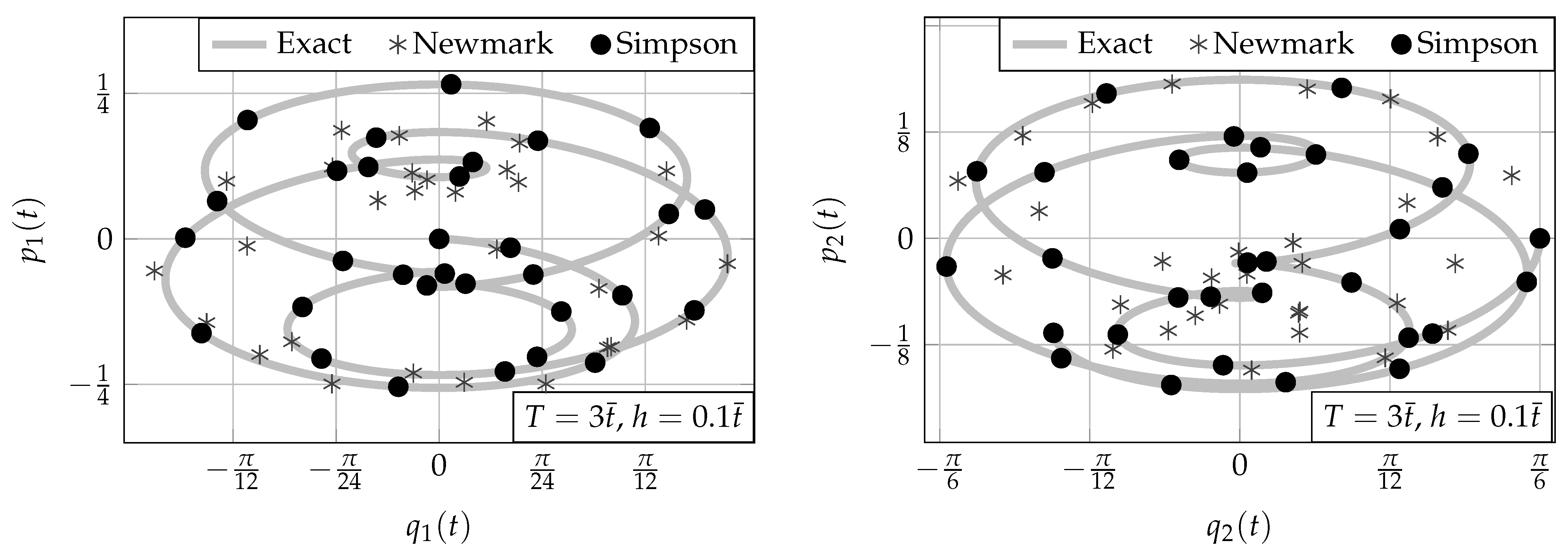
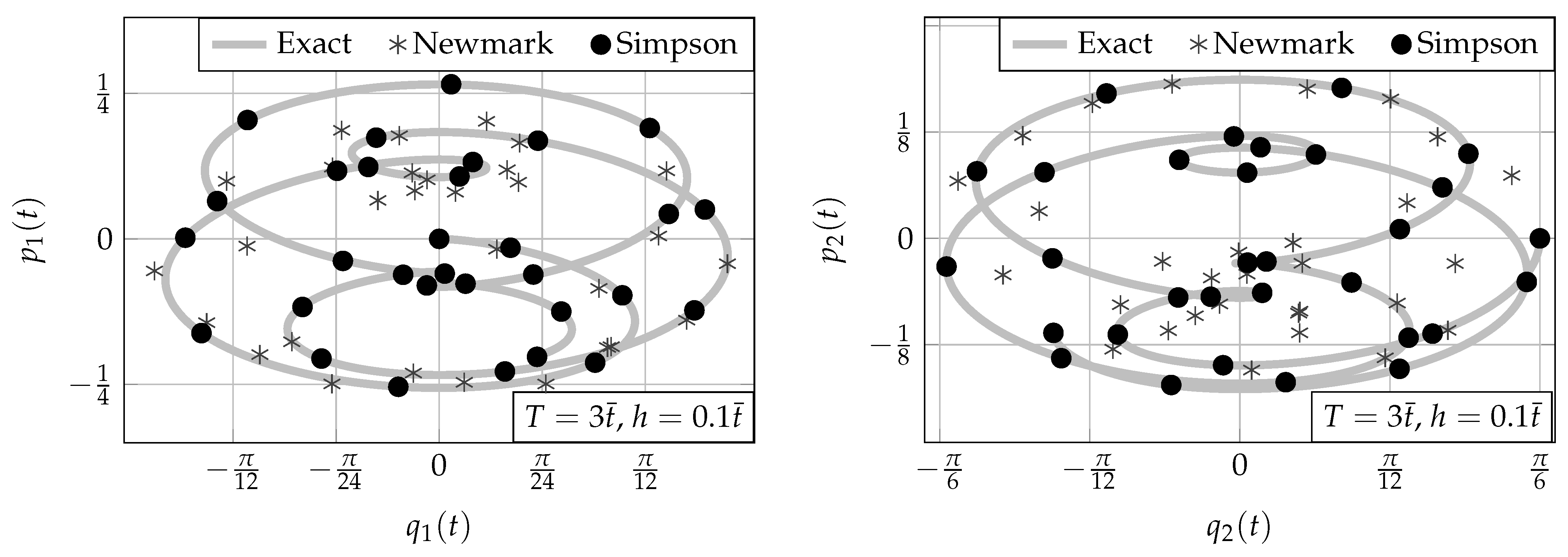
6.2. Phase Portraits
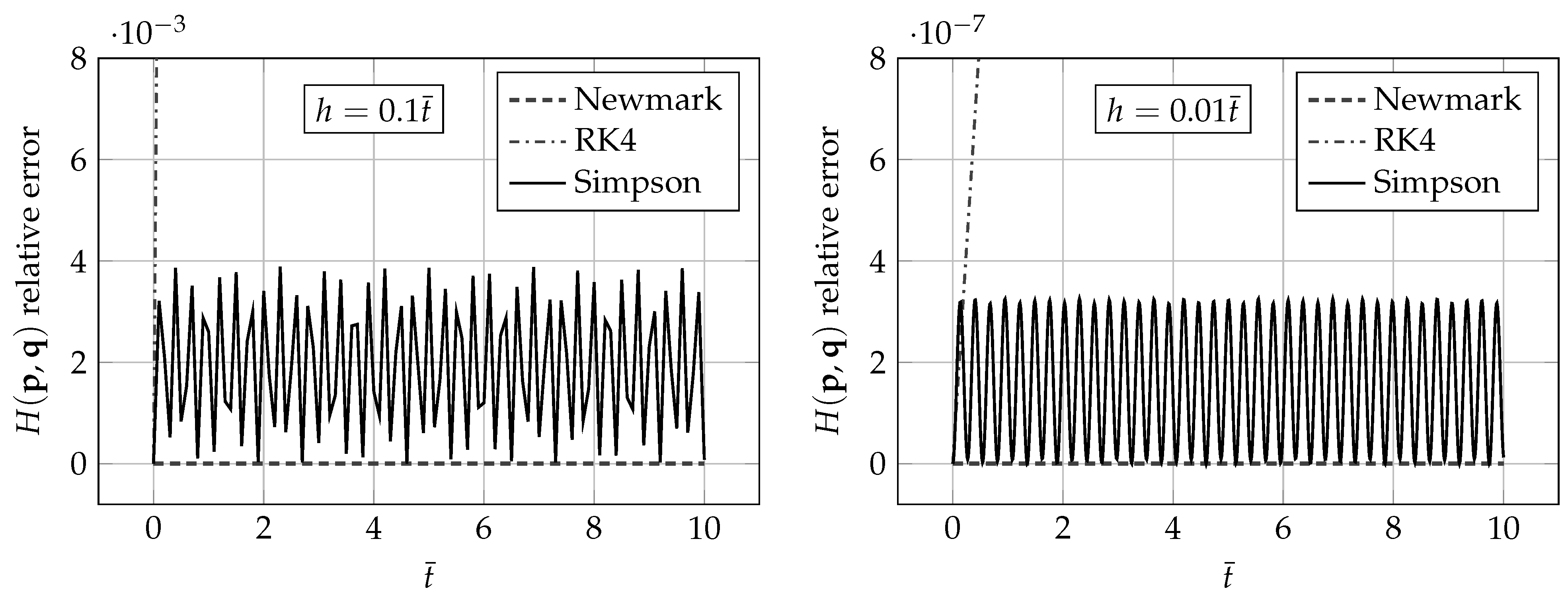
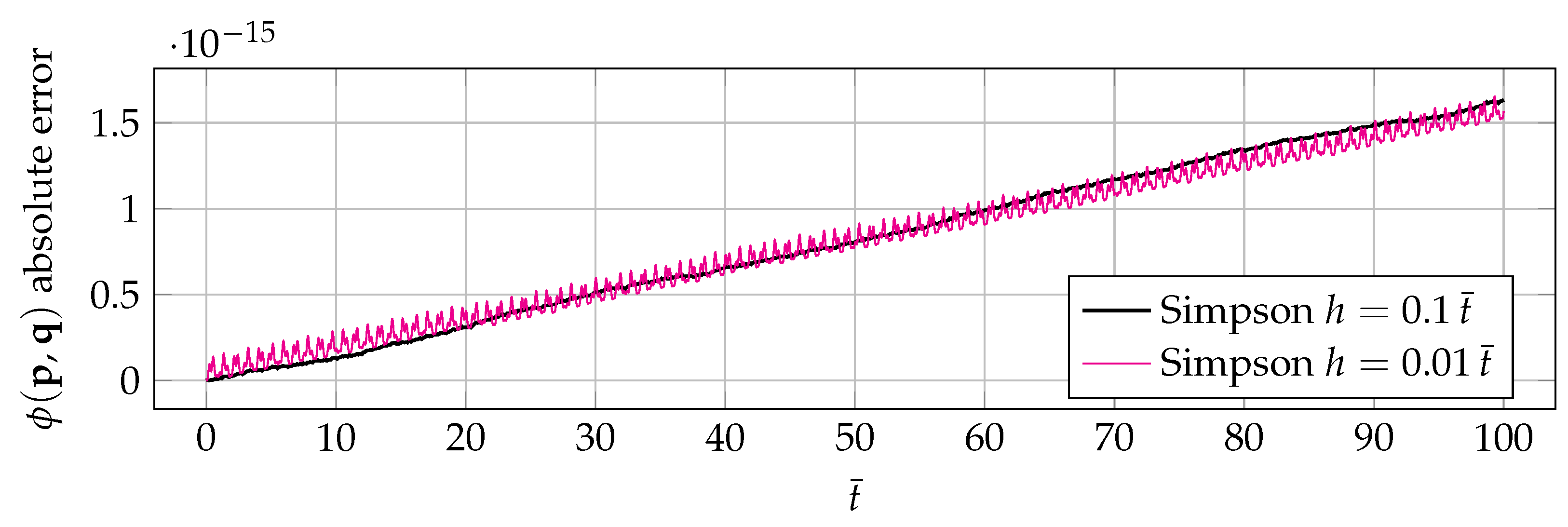
6.3. Energy Conservation
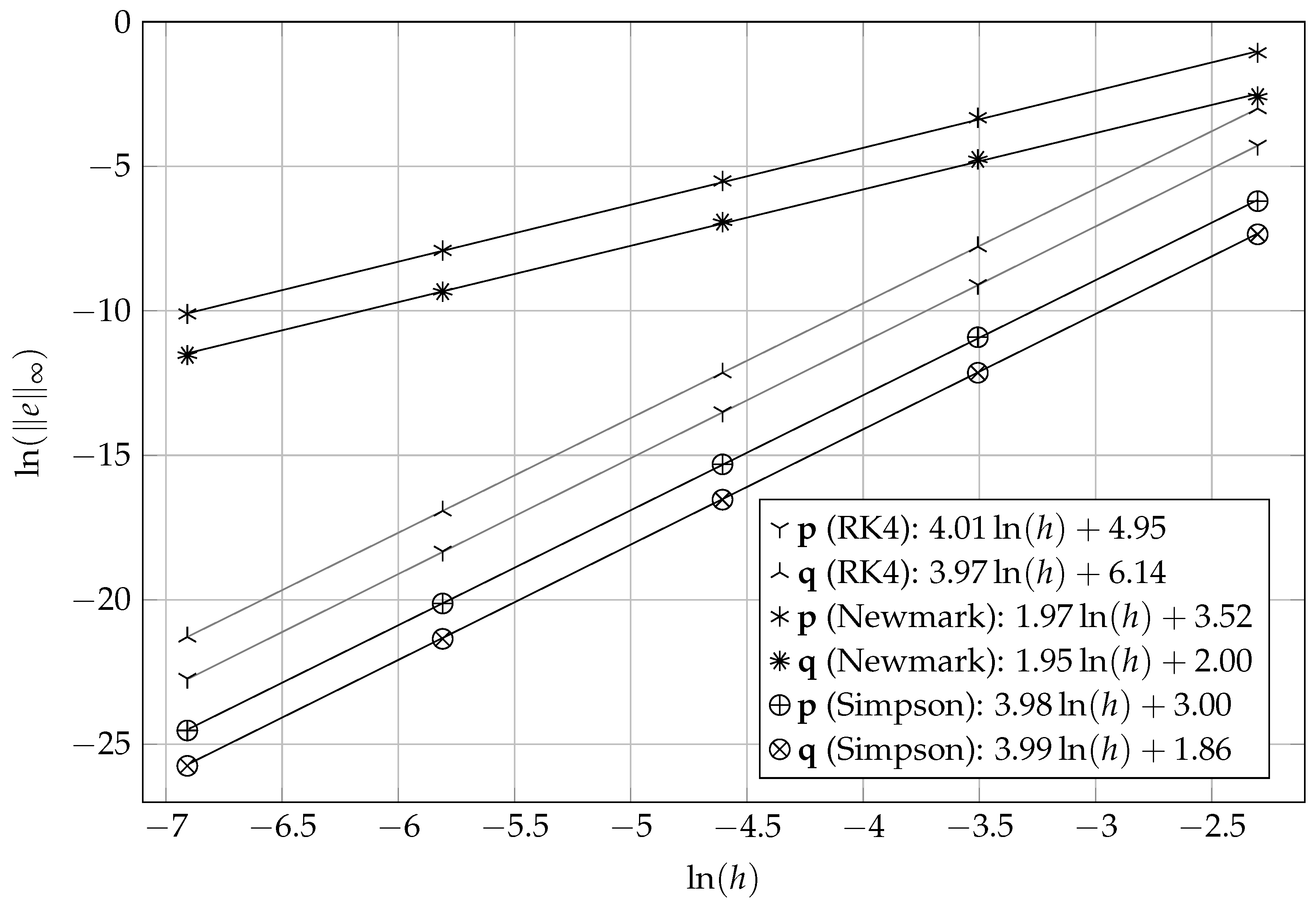
6.4. Convergence
7. Concluding Remarks and Perspectives
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Goldstine, H.H. A History of Numerical Analysis from the 16th through the 19th Century; Studies in the History of Mathematics and Physical Sciences; Springer: New York, NY, USA, 1977. [Google Scholar] [CrossRef]
- Albinus, H.J. The mathematical tourist. Math. Intell. 2002, 24, 50–58. [Google Scholar] [CrossRef]
- Süli, E.; Mayers, D.F. An Introduction to Numerical Analysis; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Herman, A.L.; Conway, B.A. Direct optimization using collocation based on high-order Gauss-Lobatto quadrature rules. J. Guid. Control. Dyn. 1996, 19, 592–599. [Google Scholar] [CrossRef]
- Kelly, M. An Introduction to Trajectory Optimization: How to Do Your Own Direct Collocation. SIAM Rev. 2017, 59, 849–904. [Google Scholar] [CrossRef]
- Blaszczyk, T.; Siedlecki, J.; Ciesielski, M. Numerical algorithms for approximation of fractional integral operators based on quadratic interpolation. Math. Methods Appl. Sci. 2018, 41, 3345–3355. [Google Scholar] [CrossRef]
- Sabir, A.; Ur Rehman, M. A numerical method based on quadrature rules for ψ-fractional differential equations. J. Comput. Appl. Math. 2023, 419, 114684. [Google Scholar] [CrossRef]
- Mostaghim, Z.S.; Moghaddam, B.P.; Haghgozar, H.S. Numerical simulation of fractional-order dynamical systems in noisy environments. Comput. Appl. Math. 2018, 37, 6433–6447. [Google Scholar] [CrossRef]
- Fakharany, M.; El-Borai, M.M.; Abu Ibrahim, M.A. Numerical analysis of finite difference schemes arising from time-memory partial integro-differential equations. Front. Appl. Math. Stat. 2022, 8, 1055071. [Google Scholar] [CrossRef]
- Arnold, V.I. Mathematical Methods of Classical Mechanics, 2nd ed.; Springer: New York, NY, USA, 1989. [Google Scholar]
- Feynman, R.P.; Hibbs, A.R. Quantum Mechanics and Path Integrals; International Series in Pure and Applied Physics; McGraw-Hill: New York, NY, USA, 1965. [Google Scholar]
- Souriau, J.M. Structure des Systèmes Dynamiques; Maîtrises de Mathématiques, Dunod: Paris, France, 1970. [Google Scholar]
- Nusser, A.; Branchini, E. On the least action principle in cosmology. Mon. Not. R. Astron. Soc. 2000, 313, 587–595. [Google Scholar] [CrossRef]
- Rojo, A.; Bloch, A. The Principle of Least Action: History and Physics; Cambridge University Press: Cambridge, UK, 2018. [Google Scholar]
- Courant, R. Variational methods for the solution of problems of equilibrium and vibrations. Bull. Am. Math. Soc. 1943, 49, 1–23. [Google Scholar] [CrossRef]
- Allaire, G.; Craig, A. Numerical Analysis and Optimization: An Introduction to Mathematical Modelling and Numerical Simulation; Numerical Mathematics and Scientific Computation; Oxford University Press: Oxford, UK, 2007. [Google Scholar]
- Newmark, N.M. A Method of Computation for Structural Dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar] [CrossRef]
- Sanz-Serna, J.M. Symplectic integrators for Hamiltonian problems: An overview. Acta Numer. 1992, 1, 243–286. [Google Scholar] [CrossRef]
- Kane, C.; Marsden, J.E.; Ortiz, M.; West, M. Variational integrators and the Newmark algorithm for conservative and dissipative mechanical systems. Int. J. Numer. Methods Eng. 2000, 49, 1295–1325. [Google Scholar] [CrossRef]
- Hairer, E.; Wanner, G.; Lubich, C. Geometric Numerical Integration; Springer Series in Computational Mathematics; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar] [CrossRef]
- De Vogelaere, R. Methods of Integration which Preserve the Contact Transformation Property of the Hamilton Equations; Department of Mathematics, University of Notre Dame: Notre Dame, IN, USA, 1956. [Google Scholar] [CrossRef]
- Géradin, M.; Rixen, D.J. Mechanical Vibrations: Theory and Application to Structural Dynamics; John Wiley & Sons: Chichester, UK, 2015. [Google Scholar]
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering, 5th ed.; Prentice-Hall International Series in Civil Engineering and Engineering Mechanics; Pearson Education Limited: Harlow, UK, 2020. [Google Scholar]
- Boyer, F.; Lebastard, V.; Candelier, F.; Renda, F. Extended Hamilton’s principle applied to geometrically exact Kirchhoff sliding rods. J. Sound Vib. 2022, 516, 116511. [Google Scholar] [CrossRef]
- Boyer, F.; Gotelli, A.; Tempel, P.; Lebastard, V.; Renda, F.; Briot, S. Implicit Time-Integration Simulation of Robots With Rigid Bodies and Cosserat Rods Based on a Newton–Euler Recursive Algorithm. IEEE Trans. Robot. 2024, 40, 677–696. [Google Scholar] [CrossRef]
- Dubois, F.; Rojas-Quintero, J.A. A Variational Symplectic Scheme Based on Simpson’s Quadrature. In Proceedings of the Geometric Science of Information, St. Malo, France, 30 August–1 September 2023; Nielsen, F., Barbaresco, F., Eds.; Springer: Cham, Switzerland, 2023; pp. 22–31. [Google Scholar] [CrossRef]
- Dubois, F.; Antonio Rojas-Quintero, J. Simpson’s Quadrature for a Nonlinear Variational Symplectic Scheme. In Proceedings of the International Conference on Finite Volumes for Complex Applications, Strasbourg, France, 30 October–3 November 2023; Franck, E., Fuhrmann, J., Michel-Dansac, V., Navoret, L., Eds.; Springer: Cham, Switzerland, 2023; Volume 2, pp. 83–92. [Google Scholar] [CrossRef]
- Raviart, P.A.; Thomas, J.M. Introduction à l’Analyse Numérique des Équations aux Dérivées Partielles; Collection Mathématiques Appliquées pour la Maîtrise; Masson: Paris, France, 1983. [Google Scholar]
- Gear, C. Simultaneous Numerical Solution of Differential-Algebraic Equations. IEEE Trans. Circuit Theory 1971, 18, 89–95. [Google Scholar] [CrossRef]
- Chyba, M.; Hairer, E.; Vilmart, G. The role of symplectic integrators in optimal control. Optim. Control. Appl. Methods 2009, 30, 367–382. [Google Scholar] [CrossRef]
- Razafindralandy, D.; Salnikov, V.; Hamdouni, A.; Deeb, A. Some robust integrators for large time dynamics. Adv. Model. Simul. Eng. Sci. 2019, 6, 5. [Google Scholar] [CrossRef]
- Zhong, G.; Marsden, J.E. Lie-Poisson Hamilton-Jacobi theory and Lie-Poisson integrators. Phys. Lett. A 1988, 133, 134–139. [Google Scholar] [CrossRef]
- Wolfram Research, Inc. Mathematica, version 12.3; Wolfram Research, Inc.: Champaign, IL, USA, 2021. [Google Scholar]
- Ibragimov, N.K. Elementary Lie Group Analysis and Ordinary Differential Equations; Wiley: Chichester, UK, 1999. [Google Scholar]
- Hydon, P.E. Symmetry Methods for Differential Equations: A Beginner’s Guide; Cambridge Texts in Applied Mathematics; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Gladkov, S.O.; Bogdanova, S.B. About the possibility of synchronization in dynamical systems. J. Phys. Conf. Ser. 2020, 1479, 012011. [Google Scholar] [CrossRef]
- Rojas-Quintero, J.A.; Dubois, F.; Ramírez-de Ávila, H.C. Riemannian Formulation of Pontryagin’s Maximum Principle for the Optimal Control of Robotic Manipulators. Mathematics 2022, 10, 1117. [Google Scholar] [CrossRef]
- Shirafkan, N.; Gosselet, P.; Bamer, F.; Oueslati, A.; Markert, B.; de Saxcé, G. Constructing the Hamiltonian from the Behaviour of a Dynamical System by Proper Symplectic Decomposition. In Proceedings of the Geometric Science of Information, Paris, France, 21–23 July 2023; Nielsen, F., Barbaresco, F., Eds.; Springer: Cham, Switzerland, 2021; pp. 439–447. [Google Scholar] [CrossRef]
- Terze, Z.; Pandža, V.; Andrić, M.; Zlatar, D. Lie group dynamics of reduced multibody-fluid systems. Math. Mech. Complex Syst. 2021, 9, 167–177. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constants | Initial Conditions |
|---|---|
| Error Norm Values | ||||||
|---|---|---|---|---|---|---|
| Simulation Length T | Number of Meshes | 10 | 20 | 40 | Convergence Order | |
| 1 | Newmark | 0.0751 | 0.0230 | 0.00606 | 1.81 | |
| RK4 | 0.0139 | 0.000800 | 0.0000540 | 4.01 | ||
| Simpson | 0.000640 | 0.0000416 | 0.00000257 | 3.98 | ||
| Newmark | 0.342 | 0.0961 | 0.0251 | 1.88 | ||
| RK4 | 0.0483 | 0.00340 | 0.000200 | 3.91 | ||
| Simpson | 0.00201 | 0.000141 | 0.00000876 | 3.92 | ||
| 10 | Number of meshes | 100 | 200 | 400 | ||
| Newmark | 0.273 | 0.206 | 0.782 | 0.90 | ||
| RK4 | 0.0822 | 0.00990 | 0.0137 | 1.29 | ||
| Simpson | 0.00720 | 0.000433 | 0.0000268 | 4.03 | ||
| Newmark | 0.694 | 0.657 | 0.244 | 0.75 | ||
| RK4 | 0.284 | 0.0329 | 0.0157 | 2.09 | ||
| Simpson | 0.0235 | 0.00141 | 0.0000906 | 4.01 | ||
| 100 | Number of meshes | 1000 | 2000 | 4000 | ||
| Newmark | 0.521 | 0.492 | 0.223 | 0.61 | ||
| RK4 | 0.108 | 0.0786 | 0.00640 | 2.03 | ||
| Simpson | 0.0705 | 0.00439 | 0.000272 | 4.01 | ||
| Newmark | 1.02 | 0.964 | 0.665 | 0.31 | ||
| RK4 | 0.328 | 0.2650 | 0.0216 | 1.96 | ||
| Simpson | 0.237 | 0.0147 | 0.000914 | 4.01 | ||
| 1000 | Number of meshes | 10,000 | 20,000 | 40,000 | ||
| Newmark | 0.545 | 0.551 | 0.548 | 0.00 | ||
| RK4 | 0.326 | 0.119 | 0.0595 | 1.23 | ||
| Simpson | 0.190 | 0.0438 | 0.00274 | 3.06 | ||
| Newmark | 1.02 | 1.03 | 1.03 | 0.01 | ||
| RK4 | 0.581 | 0.397 | 0.200 | 0.77 | ||
| Simpson | 0.638 | 0.147 | 0.00922 | 3.06 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rojas-Quintero, J.A.; Dubois, F.; Cabrera-Díaz, J.G. Simpson’s Variational Integrator for Systems with Quadratic Lagrangians. Axioms 2024, 13, 255. https://doi.org/10.3390/axioms13040255
Rojas-Quintero JA, Dubois F, Cabrera-Díaz JG. Simpson’s Variational Integrator for Systems with Quadratic Lagrangians. Axioms. 2024; 13(4):255. https://doi.org/10.3390/axioms13040255
Chicago/Turabian StyleRojas-Quintero, Juan Antonio, François Dubois, and José Guadalupe Cabrera-Díaz. 2024. "Simpson’s Variational Integrator for Systems with Quadratic Lagrangians" Axioms 13, no. 4: 255. https://doi.org/10.3390/axioms13040255
APA StyleRojas-Quintero, J. A., Dubois, F., & Cabrera-Díaz, J. G. (2024). Simpson’s Variational Integrator for Systems with Quadratic Lagrangians. Axioms, 13(4), 255. https://doi.org/10.3390/axioms13040255