1. Introduction
The shiitake mushroom is one of the edible fungi with the largest cultivation scale and cultivation range in the world due to its good edible and medicinal values [
1]. China’s shiitake mushroom production ranks first in the world, accounting for over 90% of the global production, which reached 12.554 million tons in 2021 [
2]. Shiitake mushrooms cultivated in sticks require selective and timely harvesting at high frequency to ensure their perfect edible quality. Currently, relying on manual picking consumes a large amount of labor and becomes an important factor in increasing production costs [
3]. Consequently, there is growing interest in China’s development of autonomous harvesting robots to replace manual labor.
During the harvesting process, conducting non-destructive operations on the tender fruit bodies of shiitake mushrooms is a prerequisite for achieving mechanized harvesting [
4,
5,
6]. Shiitake mushroom fruit bodies consist of a cap and a stipe. The traditional manual picking method involves gripping the base of the stipe with the thumb and index finger of one hand, rotating the stipe left and right, and slowly pulling it upward to detach it from the substrate. When harvesting, it should also be noted that the hand can only touch the stipe, and cannot bruise the cap and folds. If the method of root excision is adopted, it may lead to stipe residues remaining on the mushroom stick, affecting future mushroom growth. Therefore, according to the manual harvesting skills, the mushroom stipe needs to be reliably and safely gripped, ensuring sufficient force for picking while avoiding any damage to the stipe.
The quality and efficiency of shiitake mushroom harvesting are directly determined by the picking grasper, making it a crucial component of robot harvesting systems. Currently, both domestic and international scholars have conducted extensive research on end effectors for harvesting umbrella-shaped edible fungi. Catha and Van et al. developed mushroom harvesting machines that utilize blades for mushroom harvesting. However, rigid blade harvesting severely damaged mushroom quality, rendering it suitable only for processed products. Reed et al. [
7] developed a mushroom harvesting robot that utilizes vacuum suction cups made of corrugated tube silicone to grip the mushroom cap and twist it. Huang et al. [
8] designed a picking grasper that also uses vacuum suction cups to grip the mushroom cap and utilizes a curved track to bend the mushroom. Lu Wei et al. [
9] designed a flexible grasper with 3–4 joints, using a top-down twisting method for harvesting. Cheng et al. [
10] designed a grasper for harvesting Agaricus bisporus mushrooms, which features a cylinder and an elastic sleeve structure, achieving harvesting through the contraction of liquid plastic in the elastic sleeve. The aforementioned graspers all exert force on the mushroom cap, but shiitake mushroom caps are soft and vulnerable, so touching them should be avoided. None of the aforementioned graspers meet the requirements for shiitake mushroom harvesting. Therefore, designing a picking grasper suitable for shiitake mushroom harvesting is necessary.
Currently, picking graspers for tender agricultural products are mainly categorized in two ways to achieve lossless gripping: active compliance and passive compliance. Active compliance is generally realized based on the feedback control of force, and its goal is to establish a desired dynamic relationship between the position of the robot’s picking grasper and the environmental contact force [
11]. On the other hand, passive compliance relies on the deformation of flexible components within the picking grasper to accomplish all the motions, thus realizing the transfer of force or energy. The application of flexible components allows for constant force output within a certain range, reducing the need for force sensing and control in constant force mechanisms [
12]. Regardless of the compliance method used, the mechanical properties of the stipe itself when subjected to compression should be considered in order to realize compliant gripping of the stipe.
The stipe is a biologically characterized material with significant viscoelastic properties, which are manifested by the presence of dynamic relaxation of the extrusion stresses during the extrusion process, i.e., stress relaxation. Stress relaxation refers to the phenomenon where stress within a material gradually decays over time under constant temperature and deformation conditions [
13]. Therefore, when the picking grasper grips the mushroom stipe for picking, it needs to consider the attenuation of the gripping force due to its stress relaxation, to ensure that the grasper can maintain sufficient gripping force on the mushroom stipe during the picking process, so that it does not fall off and cause picking failure. In order to quantitatively characterize the dynamic stress relaxation characteristics of materials, classical linear models such as Maxwell [
14] and Burgers [
15] are commonly used for fitting. Jiang et al. [
16] investigated the stress relaxation characteristics of the lychee and described it with the Maxwell model, achieving a high coefficient of determination (R
2) of 0.998, indicating a high fitting accuracy. Xia et al. [
17] quantified the stress relaxation characteristics of the carrot by using the Maxwell model in order to analyze the impact damage of the carrot. Zou et al. [
18] investigated the stress relaxation characteristics of green leafy vegetables, focusing on spinach as a representative vegetable, and derived the stress relaxation characteristics under gripping conditions using the Burgers model. Therefore, the classical linear model such as Maxwell is suitable for fitting the stress dynamic relaxation characteristics of fruits and vegetables.
In this paper, for the demand of mechanized mushroom harvesting, drawing on manual picking operation skills, a new type of shiitake mushroom picking grasper with integrated stipe gripping and twisting is designed. Additionally, the compressive stress relaxation model of mushroom stipe is established to determine the optimal gripping force of the picking grasper, thereby enhancing the reliability of harvesting. As a key component of mushroom picking machinery, this study can promote the development and application of mushroom picking robots.
3. Structure Design of Picking Grasper
The manual method of mushroom picking involves gripping the base of the stipe with the thumb and forefinger of one hand, rotating the stipe left and right, and slowly pulling it upward to detach it from the substrate. During harvesting, attention should also be paid to ensure that the hand can only touch the stipe, without causing any damage to the mushroom cap or gills. In view of this, the mushroom picking grasper designed in this paper, shown in
Figure 10, features an integrated gripping and twisting structure. After successfully gripping the mushroom stipe with the fingers, the stipe is separated by a twisting motion at its base to achieve separation. Throughout the entire picking process, the fingers do not come into contact with the mushroom cap or gills.
The gripping actuator mainly includes finger, finger connector, supporting rod, sliding block, connecting rod, grooved cam, etc., as shown in
Figure 11. In order to prevent damage to the mushroom cap during gripping, the finger is designed as an “L”-shaped structure, and made of TPU 95A material. The maximum distance between the fingers is 80 mm, which can effectively avoid contact with the cap. Each finger is equipped with a 1 mm thick silicone pad on the surface to increase friction between the finger and the fruit, ensuring stable gripping and preventing the stipe from slipping [
21]. Three “L”-shaped fingers are evenly distributed at the base of the picking grasper, and their motion is roughly the same. The grooved cam adopts a centering structure, and is symmetrically distributed about the center of the mechanism; the whole is a triangular symmetrical structure, as shown in
Figure 12. The connecting rod is connected to the sliding block, and by controlling the rotation angle and direction of the servo motor, it can move within the cam groove according to a predetermined pattern. This mechanism converts the rotational motion of the servo motor into translational motion of the sliding block, causing the picking grasper to contract inward.
The rotating actuator mainly includes servo motor, clamping gear, servo fixing bracket, bottom fixing bracket, top fixing bracket, bearings, etc. The clamping gear remains stationary while the large gear meshes with it. The output shaft of the servo motor is connected to the big gear, driving it to rotate synchronously around the clamping gear. Meanwhile, to secure the servo motor, it is closely embedded with a servo fixing bracket. The servo fixing bracket is embedded in a bearing, and the bearing is embedded in the top fixing bracket. The top fixing bracket is connected to the outer shell of the picking grasper. When the servo motor rotates, it drives the entire grasper to rotate, accordingly.
4. Kinematic Mechanics Analysis of the Grasper
4.1. Force Analysis of Gripping Actuator
In the gripping process of the grasper gripping actuator, the driving force starts from the servo motor, by transmitting through the grooved cam, connecting rod, sliding block, supporting rod, and TPU finger structure, and ultimately acting on the gripped mushroom stipe. Therefore, in order to obtain the gripping force of the finger acting on the mushroom stipe, it is necessary to carry out a static analysis of the gripping actuator and the finger structure. For the picking method of twisting the mushroom stipe, the relationship between the grasper’s gripping force, twisting separation torque, and servo output torque is analyzed. Given the symmetric distribution of the three fingers relative to the groove cam, with identical structures, and the servo output torque acting at the center of the groove cam, the motion process and force situation are similar. Therefore, the analysis of the force exerted by the fingers on the mushroom stipe starts from a single finger, simplifying the analysis process.
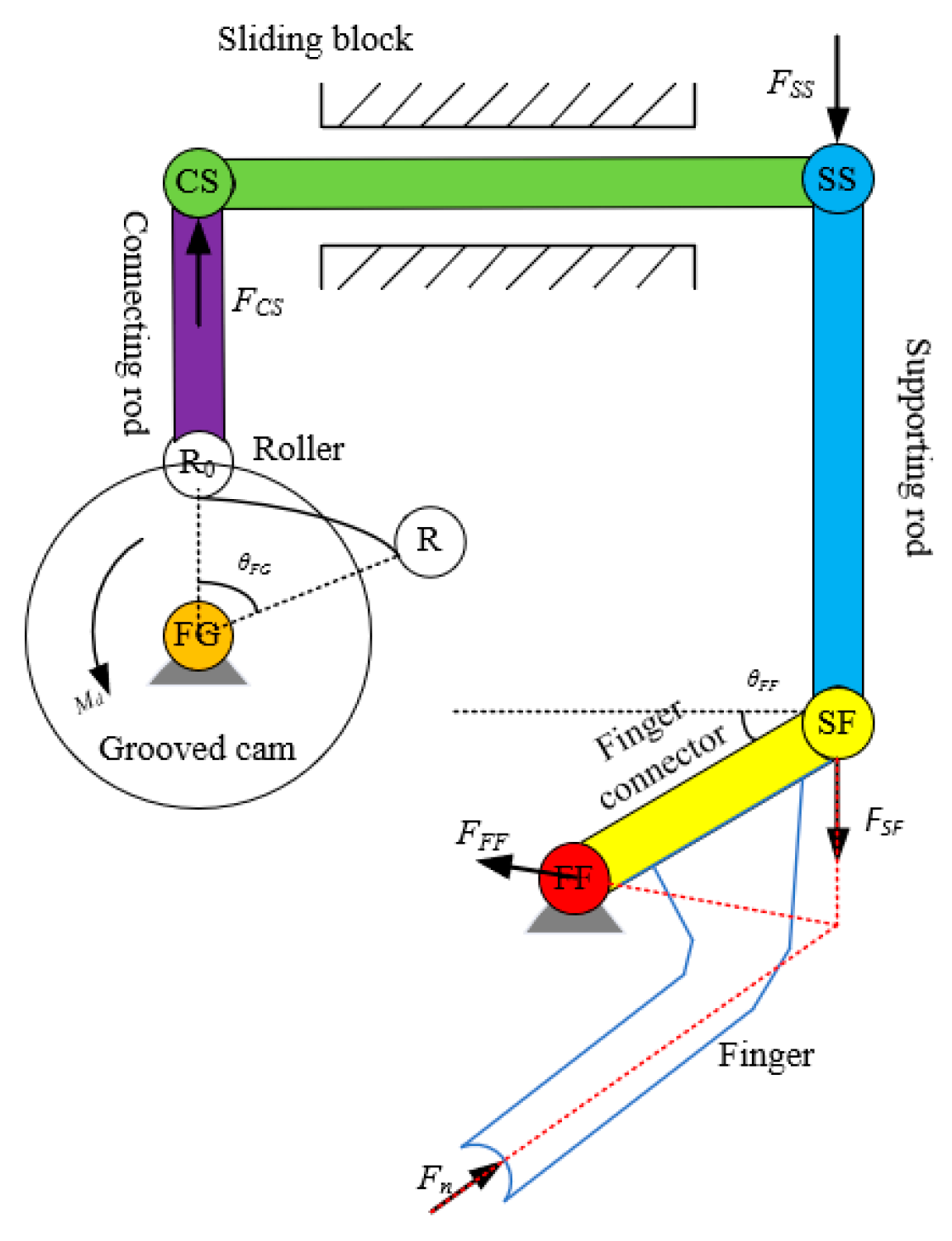
The structure and motion principle of the grasper’s gripping actuator are shown in
Figure 13. The finger can be equated to a single concentrated force in the force analysis (the force and torque analysis on the finger structure is discussed below). During grasping, the servo motor drives the grooved cam to rotate clockwise, and the cam pulls the sliding block to move and drives the supporting rod to move. Subsequently, the finger connector is driven by the support rod to rotate around the joint FF to realize the gripping motion of the finger.
In the figure, Md is the servo output torque; θFG is the angle between the initial and final positions of the roller relative to the center of the grooved cam, and θFF is the angle between the finger connector and the horizontal direction.
Due to the negligible mass of the individual moving parts in this transmission mechanism, the gravity and inertia forces during the grasper’s movement can be disregarded.
Under static equilibrium conditions, a mechanical analysis of the transmission mechanism is conducted. In the initial state, the connecting rod and support rod are in a vertical position. As the grooved cam rotates, the angles of both rods change minimally, which can be ignored for simplification. The connecting rod is considered as a two-force member, and by analyzing the force acting on the sliding block, we obtain the following:
The direction is opposite, where
FXY is the force of member
X on member
Y. In order to simplify the analysis, the sliding friction of the sliding block on the grooved cam is negligible. Thus, the supporting rod is a two-force rod. Take the finger connector and finger to analyze the force and then according to the geometrical condition of the equilibrium of the plane convergent force system, a closed force triangle can be obtained. To ensure the force balance between finger connector and finger, the following can be obtained:
where
Fn is the force between the finger and the mushroom stipe, i.e., the finger gripping force;
γ is the angle of
Fn in the horizontal direction;
β is the angle of
FFF in the horizontal direction. According to Equations (9) and (10), the following can be obtained:
where
and where
h is the distance from the finger connector to the bottom of the finger in the initial state;
α is the angle of the finger in the horizontal direction in the initial state;
L is the length of the finger connector.
In order to obtain the relationship between the servo output torque
Md and the gripping force
Fn, the grooved cam is force analyzed. The moment balance equation at joint FG is given as follows:
According to the force characteristics of a two-force rod,
where
FFS and
FSF are in opposite directions.
From Equations (11), (14) and (15), we can obtain the following:
where
R is the radius of the grooved cam.
4.2. Contact Force Analysis between Finger and Mushroom Stipe
To facilitate the calculation, the mushroom stipe is simplified as a regular cylinder. The picking grasper designed in this paper features a 3-finger uniformly distributed arrangement. Therefore, it is only necessary to analyze a single finger. Considering the picking method of the picking grasper, the simplified single finger on the mushroom stipe plane force model is shown in
Figure 14.
The gripping force of the finger on the mushroom stipe is
Fn, the unit is N/m, and the direction is pointing to the center of the circle.
Fs is the static friction of the finger on the mushroom stipe, the unit is N/m, and the direction is perpendicular to the gripping force. When the finger twists the mushroom stipe, the static friction
Fs provides the twisting force for the twisting separation torque
T. According to the torque calculation formula, the relationship between the twisting separation torque
T and the static friction
Fs can be obtained as follows:
where
In the equation, μ is the maximum static friction coefficient between the finger and the mushroom stipe; r is the radius of the mushroom stipe.
Therefore, from Equations (17) and (18), the relationship between the twisting separation torque
T and the gripping force
Fn can be obtained as below:
According to Equations (16) and (19), the relationship between the servo output torque
Md and the twisting separation torque
T exerted by the finger on the mushroom stipe can be obtained as follows:
4.3. Grasper Picking Performance Analysis
The twisting separation torque required for picking mushrooms ranges from 0.092 N·m to 0.137 N·m. The larger the diameter of the mushroom stipe, the larger is the twisting separation torque
T required, which is roughly linear. Additionally, the phenomenon of stress relaxation in the stipe needs to be considered. In the process of the grasper gripping and twisting the mushroom stipe, the displacement of the finger to the stipe remains constant, which belongs to the process of stress relaxation. The time required for the grasper twisting to separate the mushroom stipe is about 5 s, which is the stress relaxation time. The variation of pressure with time on the stipe with a diameter of 16 mm is shown in
Figure 15. Point A is the pressure on the stipe in the initial state, and point B is the pressure on the stipe after 5 s. According to the stress relaxation equation of the stipe in Equation (3), the twisting separation torque required for the actual picking of shiitake mushrooms should be slightly larger than the twisting separation torque measured in the experiment, which is about 0.104 N·m to 0.155 N·m.
From Equations (16) and (20), the relationship between the grasper’s gripping force Fn, twisting separation torque T of the fingers on the mushroom stipe, and the servo output torque Md is established. Therefore, when the twisting separation torque required for actual picking is determined, the corresponding servo output torque Md can be obtained. At the same time, the gripping force Fn acting on the surface of the stipe can be determined. Considering the stress relaxation characteristics of the stipe during twisting, it should be circumvented to avoid that the clamping force Fn is greater than the maximum pressure that the stipe can withstand when twisting has just begun.
6. Conclusions
To address the problem of non-destructive picking of shiitake mushrooms, the mechanical properties of shiitake mushroom picking were first analyzed. The compression mechanical test and stress relaxation test were carried out on mushroom stipe sections. The dynamic stress relaxation characteristics of mushroom stipes were then quantified by Maxwell’s equation, yielding the final result: E(t) = 0.02516e−t/2.7445 + 0.03088e−t/27.15 + 0.26196. Subsequently, finite element simulation was employed to model the stress changes during stipe compression, combined with the above parameters. The pressure on the stipes obtained dynamically by the texture analyzer was verified with the finite element simulation results, while the mean square error between the simulation results and the actual results did not exceed 5%. Thus, the finite element simulation results were found to be satisfactory in comparison with the actual results.
Combined with the biological characteristics of the mushroom, a mushroom picking grasper was designed. The static analysis of the grasper’s structural model was conducted, and the relationship between the grasper’s gripping force, twisting separation torque, and servo output torque was obtained. Utilizing the dynamic stress relaxation properties of the stipes, the optimal twisting separation torque of the picking grasper for the shiitake mushroom and the corresponding output torque of the steering machine were calculated. For different diameters of mushroom stipes, the servo output torque was regulated to realize the optimal picking of the mushrooms. Additionally, tests were conducted on mushrooms of varying growth durations. The results show that the designed picking grasper is suitable for the automated non-destructive picking of shiitake mushrooms. It exhibits the best performance for shiitake mushrooms with growth days of 6 to 8 days, cap diameter of 59.6–64.5 mm, and stipe diameter of 12.8–13.6 mm.



 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}