
Design of an Embedded Energy Management System for Li–Po Batteries Based on a DCC-EKF Approach for Use in Mobile Robots

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
- They may evolve in a forestry environment, as per the work proposed in [3], where the robot collects biomass samples and provides a dataset of different forest environments,
- They may also be aerial, such as the work proposed in [4], which uses an unmanned aerial vehicle (UAV) for cellular network relay inspection.
2. Dual Coulomb Counting Extended Kalman Filter Approach
| Algorithm 1: Master microcontroller algorithm |
 |
| Algorithm 2: Slave microcontroller algorithm |
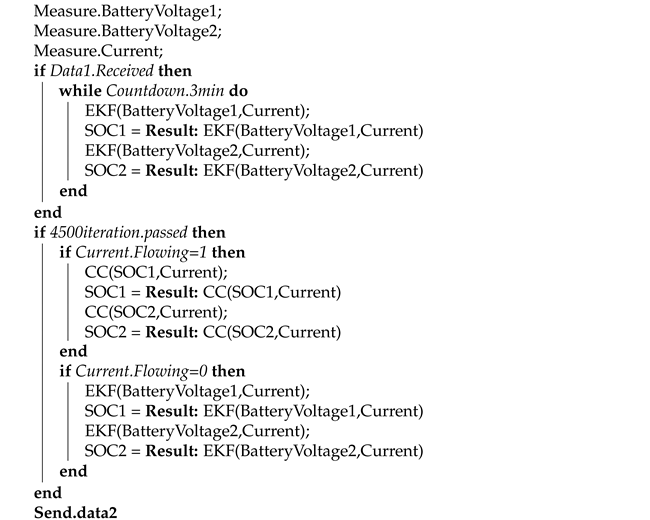 |
- For a non-null current, the slave microcontroller uses the CC function to monitor the SOC,
- For a null current, it uses the EKF function to update the SOC value.
| Algorithm 3: Extended Kalman Filter Function |
 |
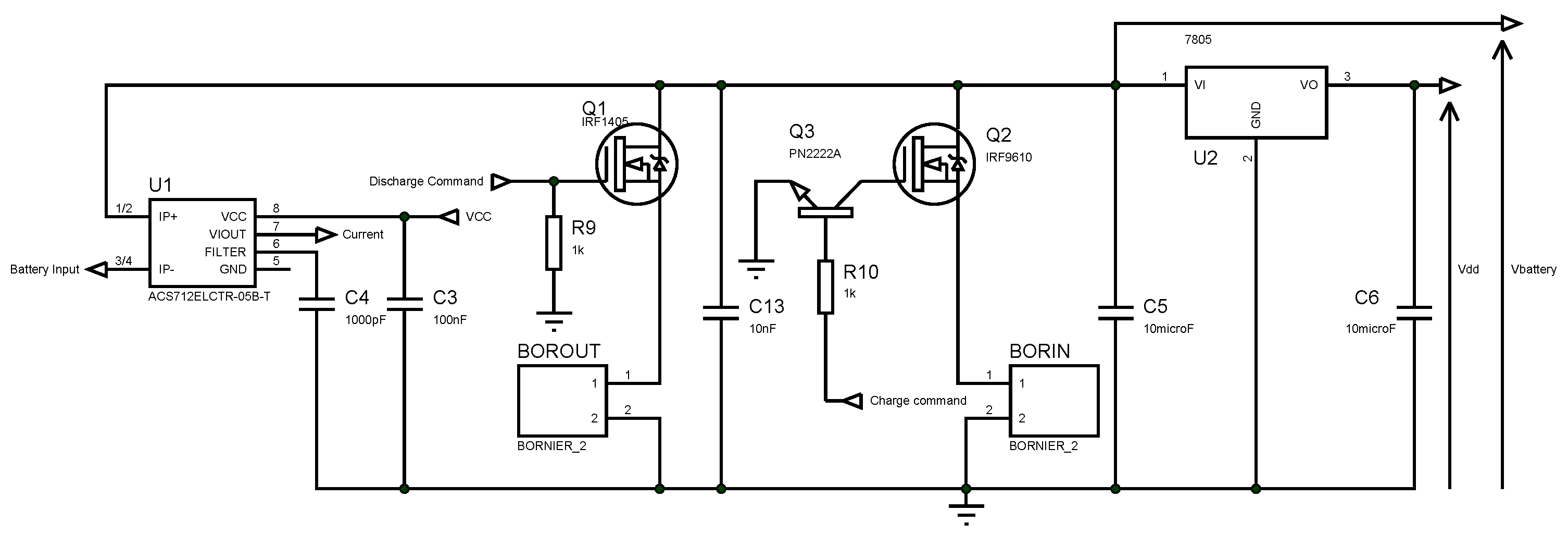
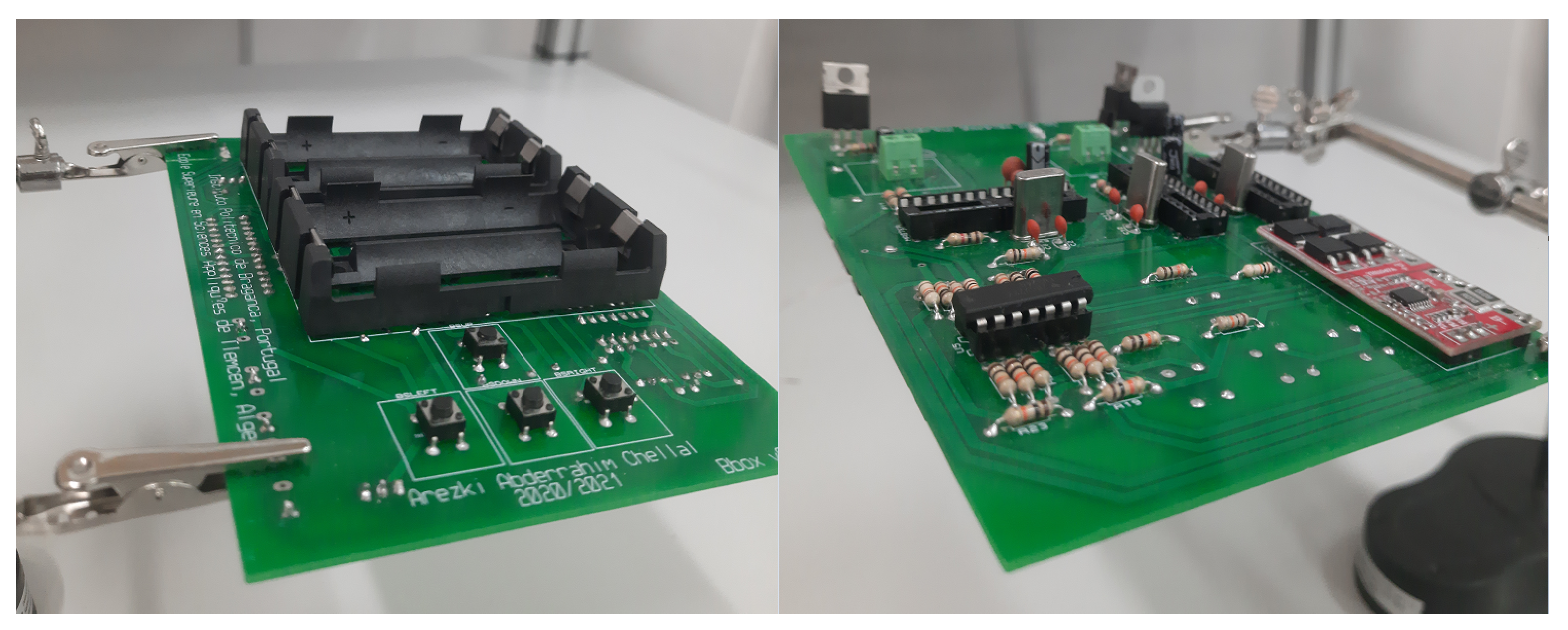
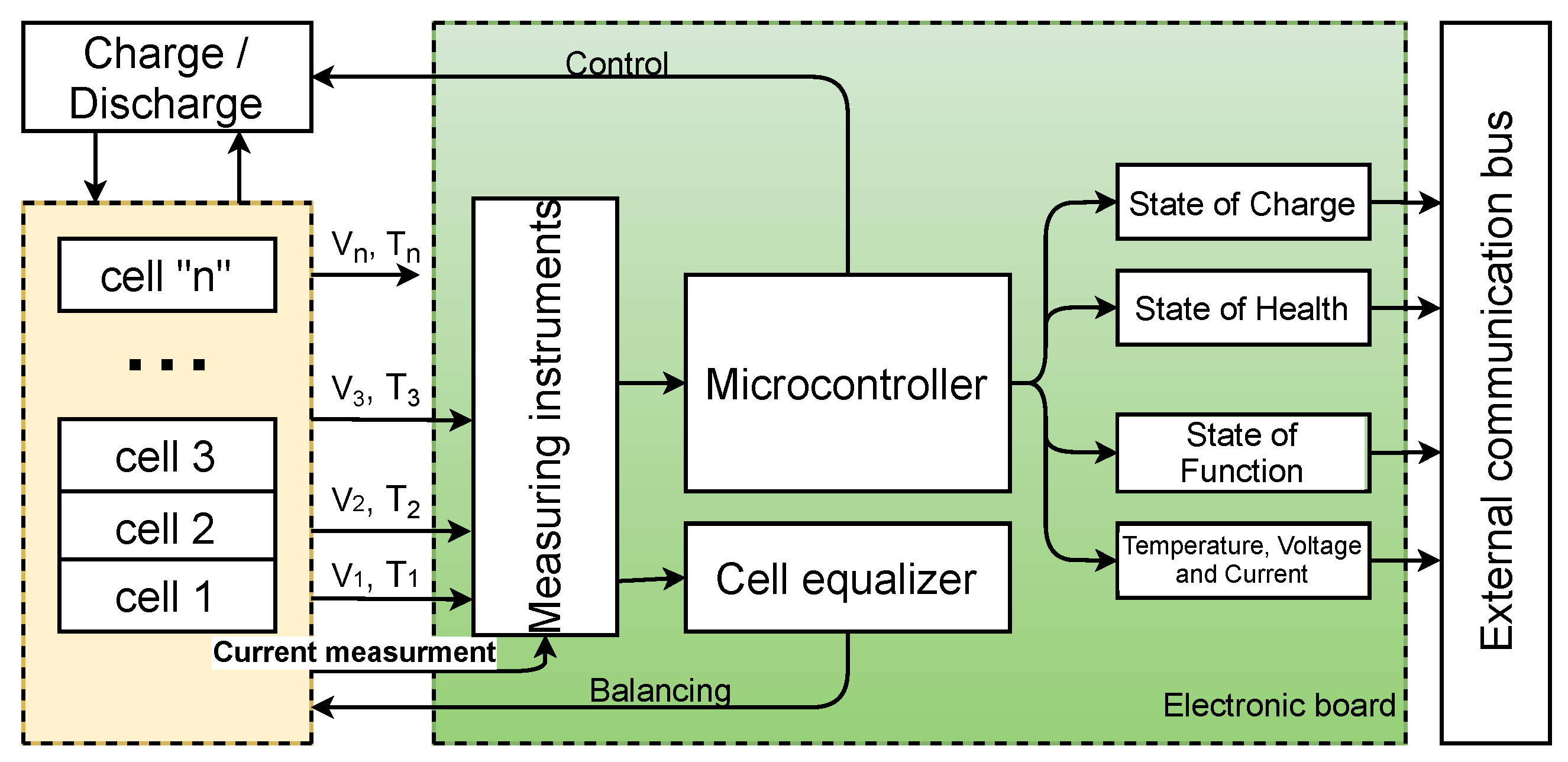
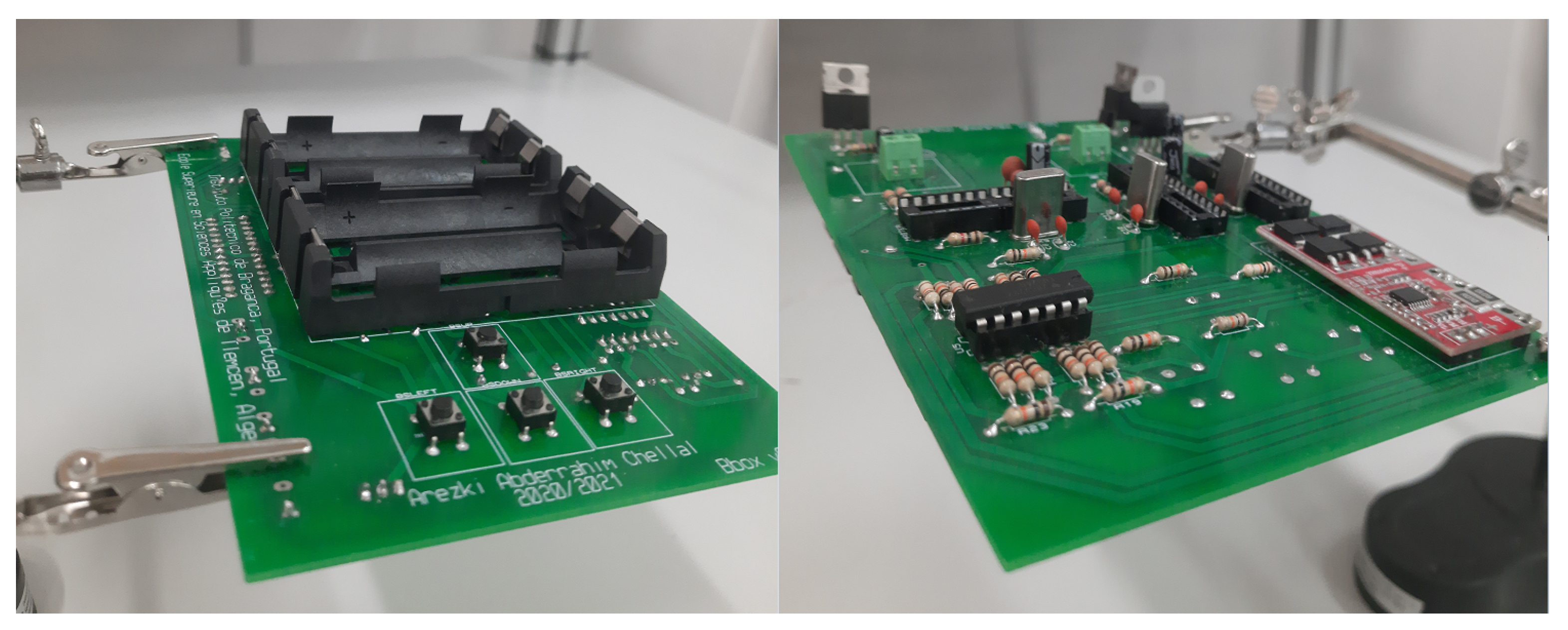
3. Board Design
3.1. Components and Power Distribution
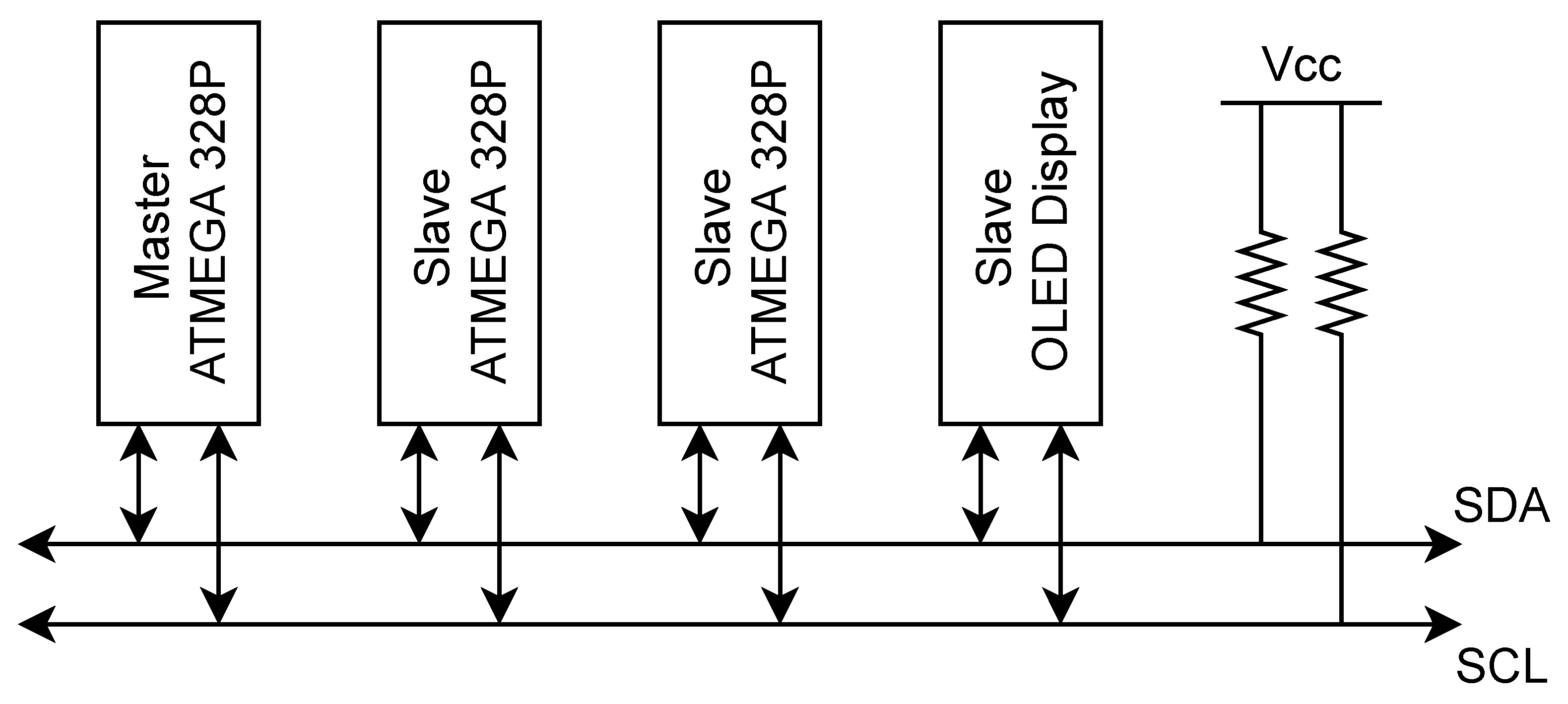
3.2. Master and Slave Microcontrollers Communication
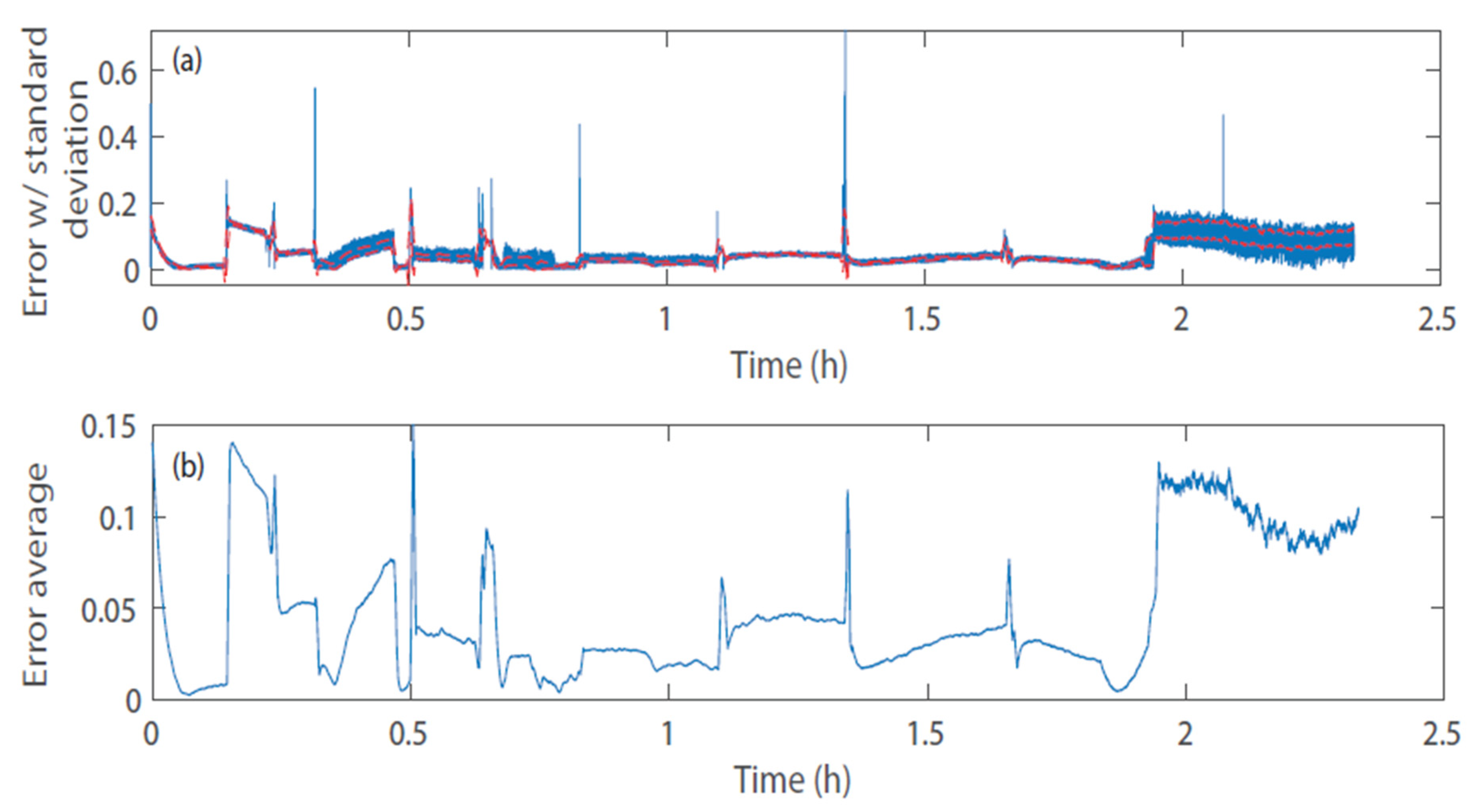
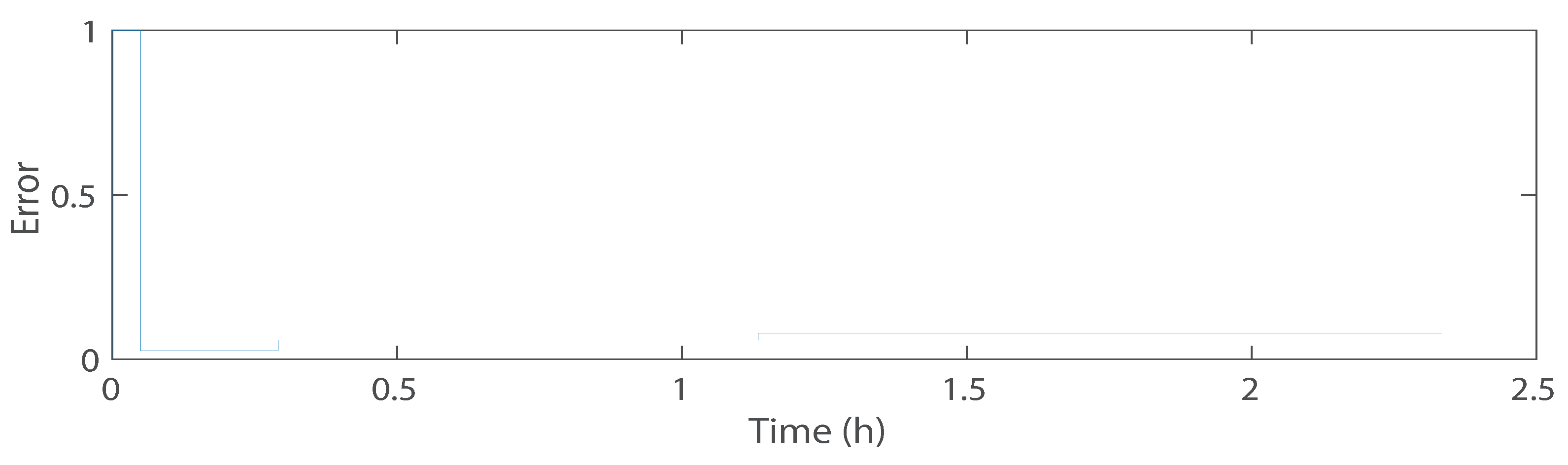
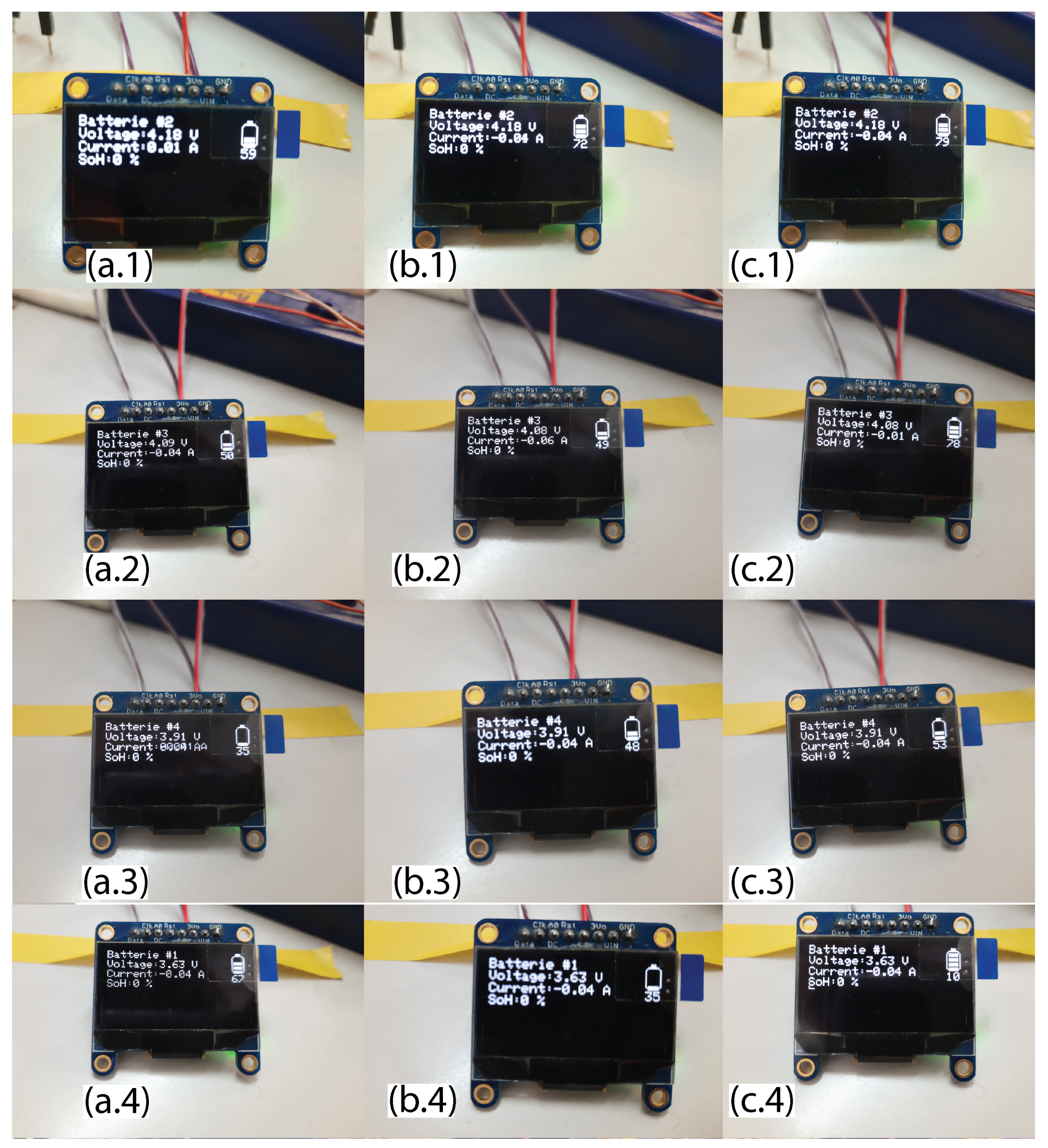
4. Results
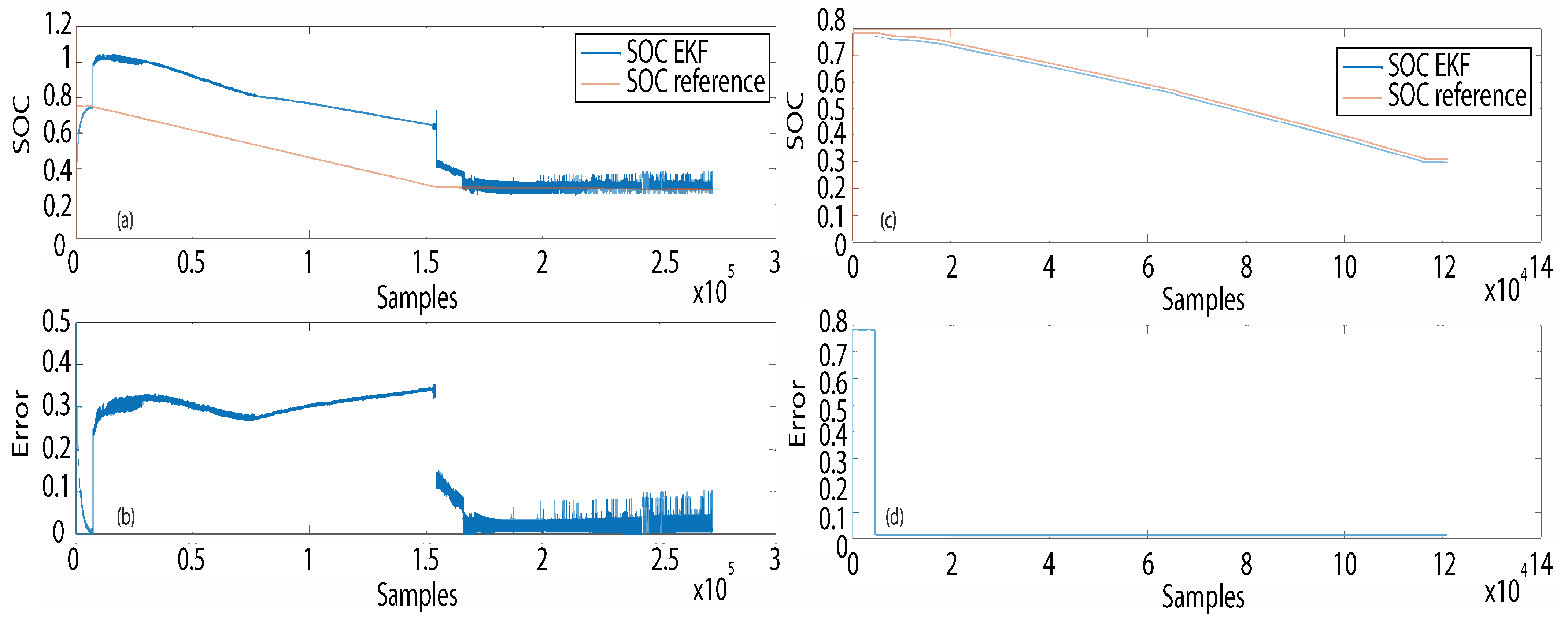
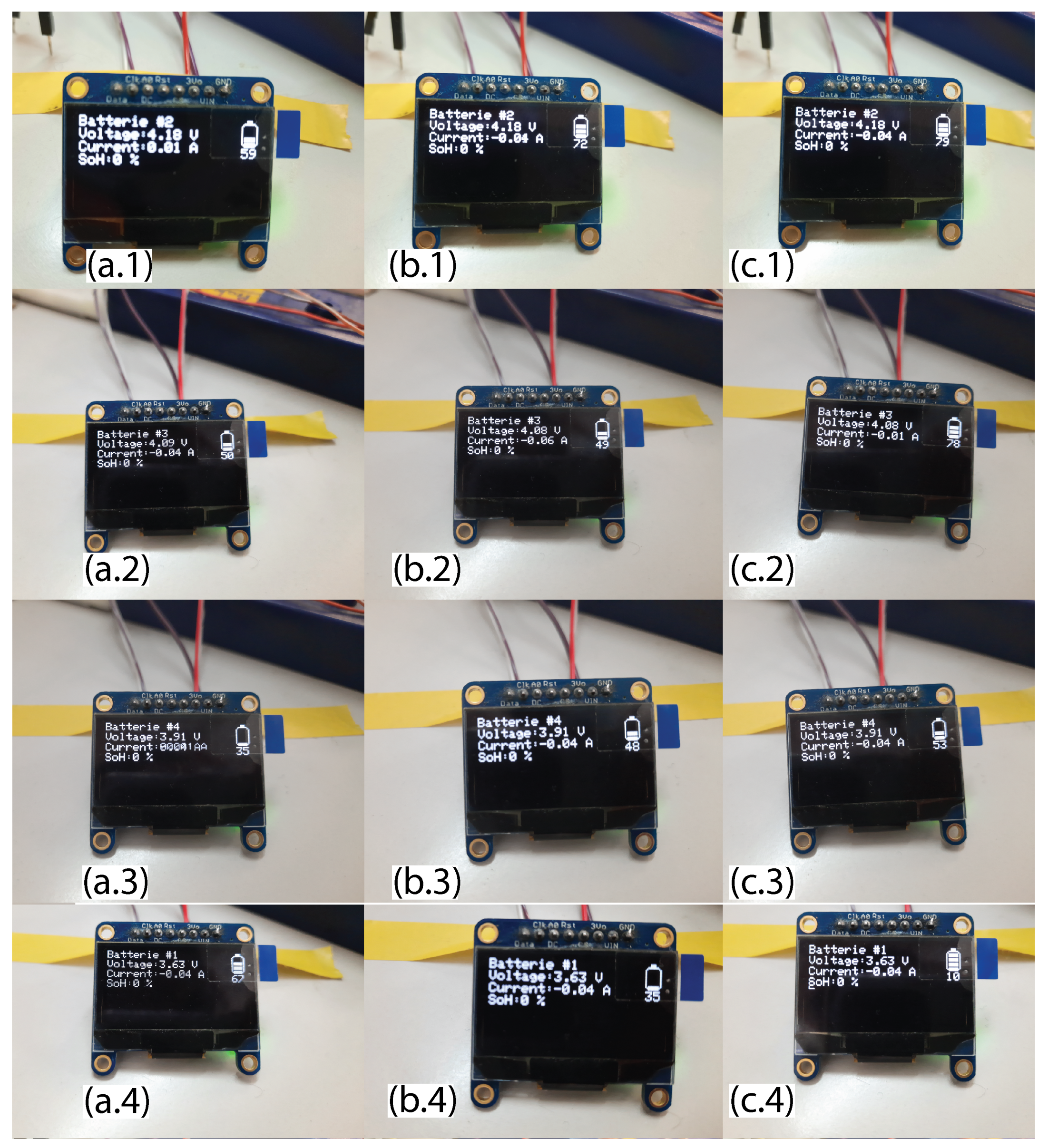
4.1. Performance Evaluation
4.2. Prototype Efficiency
4.2.1. Components Energy Consumption
4.2.2. Charging Process Efficiency
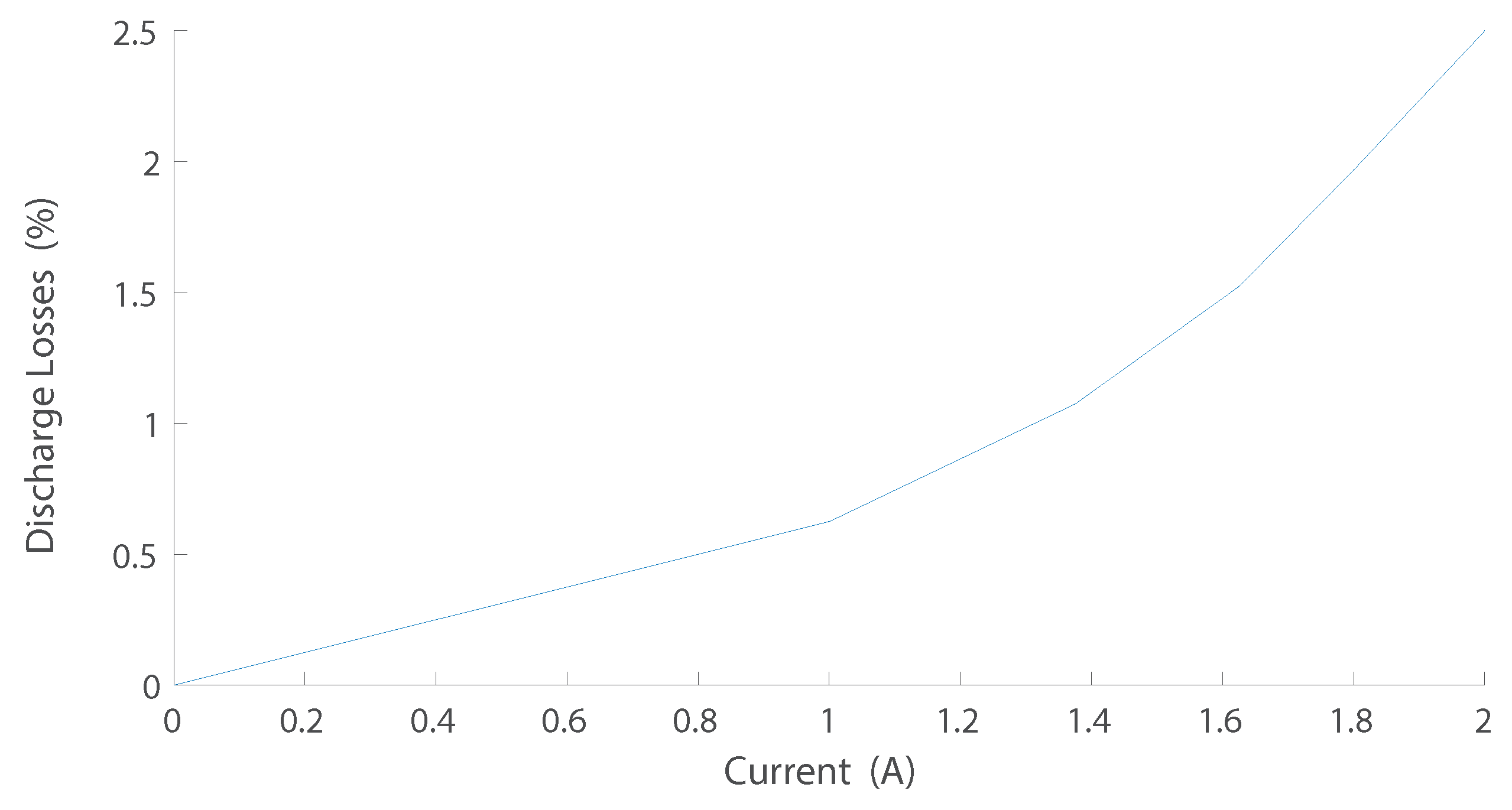
4.2.3. Discharging Process Efficiency
5. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AEKF | Ascending extended Kalman filter |
| AI | Artificial intelligence |
| AUV | Micro autonomous underwater vehicle |
| BMS | Battery management system |
| CC | Coulomb counting |
| DCC-EKF | Dual coulomb counting extended Kalman filter |
| DEKF | Dual Extended Kalman Filter |
| EKF | Extended Kalman filter |
| I2C | Inter-Integrated Circuit |
| KF | Kalman filter |
| Li-NMC | Lithium Nickel Manganese Cobalt Oxid |
| OCV | Open circuit voltage |
| PCB | Printed circuit board |
| SOC | State of charge |
| SOH | State of health |
| SOF | State of function |
| UAV | Unmanned aerial vehicle |
References
- Castillo-Zamora, J.J.; Camarillo-Gómez, K.A.; Pérez-Soto, G.I.; Rodríguez-Reséndiz, J.; Morales-Hernández, L.A. Mini-AUV Hydrodynamic Parameters Identification via CFD Simulations and Their Application on Control Performance Evaluation. Sensors 2021, 21, 820. [Google Scholar] [CrossRef] [PubMed]
- Watson, S.A.; Crutchley, D.J.; Green, P.N. The design and technical challenges of a micro-autonomous underwater vehicle (μAUV). In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 567–572. [Google Scholar]
- Reis, R.; dos Santos, F.N.; Santos, L. Forest robot and datasets for biomass collection. In Proceedings of the Fourth Iberian Robotics Conference, Porto, Portugal, 20–22 November 2019; Springer: Cham, Switzerland, 2019; pp. 152–163. [Google Scholar]
- Megnafi, H.; Medjati, W.Y. Study and Assembly of Quadrotor UAV for the Inspection of the Cellular Networks Relays. In Proceedings of the International Conference in Artificial Intelligence in Renewable Energetic Systems, Tipaza, Algeria, 22–24 December 2020; Springer: Cham, Switzerland, 2020; pp. 659–668. [Google Scholar]
- Lièvre, A. Développement d’un Système de Gestion de Batterie Lithium-Ion à Destination de VéHicules “Mild Hybrid”: Détermination des Indicateurs d’état (SoC, SoH et SoF). Ph.D. Thesis, Université Claude Bernard-Lyon I, Villeurbanne, France, 2015. [Google Scholar]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Haifeng, D.; Xuezhe, W.; Zechang, S. A new SOH prediction concept for the power lithium-ion battery used on HEVs. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; pp. 1649–1653. [Google Scholar]
- Leng, F.; Tan, C.M.; Pecht, M. Effect of temperature on the aging rate of Li ion battery operating above room temperature. Sci. Rep. 2015, 5, 12967. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Micea, M.V.; Ungurean, L.; Cârstoiu, G.N.; Groza, V. Online state-of-health assessment for battery management systems. IEEE Trans. Instrum. Meas. 2011, 60, 1997–2006. [Google Scholar] [CrossRef]
- Bonani, M.; Longchamp, V.; Magnenat, S.; Rétornaz, P.; Burnier, D.; Roulet, G.; Mondada, F. The marXbot, a miniature mobile robot opening new perspectives for the collective-robotic research. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Megnafi, H.; Chellal, A.A.; Benhanifia, A. Flexible and Automated Watering System Using Solar Energy. In Proceedings of the International Conference in Artificial Intelligence in Renewable Energetic Systems, Tipaza, Algeria, 22–24 December 2020; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Brito, T.; Pereira, A.I.; Lima, J.; Valente, A. Wireless sensor network for ignitions detection: An IoT approach. Electronics 2020, 9, 893. [Google Scholar] [CrossRef]
- UM11421 RDDRONE-BMS772 reference design. In Rev. 1–12 June 2020/User Manual; NXP: Nijmegen, The Netherlands, 2020; pp. 4–5.
- DSPH3059HD26. Rechargeable Smart Lithium Ion Battery Pack-PH3059HD26; Inspired Energy: Kirkham, UK, 2020. [Google Scholar]
- Spagnol, P.; Rossi, S.; Savaresi, S.M. Kalman filter SoC estimation for Li-ion batteries. In Proceedings of the 2011 IEEE International Conference on Control Applications (CCA), Denver, CO, USA, 28–30 September 2011; pp. 587–592. [Google Scholar]
- Knauff, M.C. Kalman Filter Based State of Charge Estimation for Valve Regulated Lead Acid Batteries in Wind Power Smoothing Applications. Ph.D. Thesis, Drexel University, Philadelphia, PA, USA, February 2013. [Google Scholar]
- Mastali, M.; Vazquez-Arenas, J.; Fraser, R.; Fowler, M.; Afshar, S.; Stevens, M. Battery state of the charge estimation using Kalman filtering. J. Power Sources 2013, 239, 294–307. [Google Scholar] [CrossRef]
- Zhang, C.; Jiang, J.; Zhang, W.; Sharkh, S.M. Estimation of state of charge of lithium-ion batteries used in HEV using robust extended Kalman filtering. Energies 2012, 5, 1098–1115. [Google Scholar] [CrossRef]
- Taborelli, C.; Onori, S.; Maes, S.; Sveum, P.; Al-Hallaj, S.; Al-Khayat, N. Advanced battery management system design for SOC/SOH estimation for e-bikes applications. Int. J. Powertrains 2016, 5, 325–357. [Google Scholar] [CrossRef]
- Kim, D.; Koo, K.; Jeong, J.J.; Goh, T.; Kim, S.W. Second-order discrete-time sliding mode observer for state of charge determination based on a dynamic resistance li-ion battery model. Energies 2013, 6, 5538–5551. [Google Scholar] [CrossRef] [Green Version]
- Kashkooli, A.G.; Fathiannasab, H.; Mao, Z.; Chen, Z. Application of artificial intelligence to state-of-charge and state-of-health estimation of calendar-aged lithium-ion pouch cells. J. Electrochem. Soc. 2019, 166, A605–A615. [Google Scholar] [CrossRef] [Green Version]
- Chellal, A.A.; Lima, J.; Gonçalves, J.; Megnafi, H. Battery Management System For Mobile Robots based on an Extended Kalman Filter Approch. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (MED), Bari, Italy, 22–25 June 2021; pp. 1131–1136. [Google Scholar]
- Chellal, A.A.; Lima, J.; Gonçalves, J.; Megnafi, H. Dual Coulomb Counting Extended Kalman Filter for Battery SOC Determination. In Proceedings of the International Conference on Optimization, Learning Algorithms and Applications, (OL2A), Bragança, Portugal, 19–21 July 2021. [Google Scholar]
- Erlangga, G.; Perwira, A.; Widyotriatmo, A. State of charge and state of health estimation of lithium battery using dual Kalman filter method. In Proceedings of the 2018 International Conference on Signals and Systems, (ICSigSys), Bali, India, 1–3 May 2018; pp. 243–248. [Google Scholar]
- Jiang, S. A Parameter Identification Method for a Battery Equivalent Circuit Model; SAE Technical Paper No. 2011-01-1367; SAE: Warrendale, PA, USA, 2011. [Google Scholar]
- Mc78xx/lm78xx/mc78xxa. 3-Terminal 1a Positive Voltage Regulator; Fairchild Semiconductor: Sunnyvale, CA, USA, 2001. [Google Scholar]
- Malvino, A.P.; Bates, D.J. Principes D’électronique: Cours et Exercices Corrigés, 3rd ed.; Dunond: Paris, France, 2016. [Google Scholar]
- Eggermont, L.D. Embedded Systems Roadmap 2002; Vision on Technology for the Future of PROGRESS; STW Technology Foundation: Utrecht, The Netherlands, 2002; p. 30. [Google Scholar]
- Kim, I.S. Nonlinear state of charge estimator for hybrid electric vehicle battery. Trans. Power Electron. 2008, 23, 2027–2034. [Google Scholar]
- Tian, Y.; Lai, R.; Li, X.; Xiang, L.; Tian, J. A combined method for state-of-charge estimation for lithium-ion batteries using a long short-term memory network and an adaptive cubature Kalman filter. Appl. Energy 2020, 265, 114789. [Google Scholar] [CrossRef]
- Campestrini, C.; Horsche, M.F.; Zilberman, I.; Heil, T.; Zimmermann, T.; Jossen, A. Validation and benchmark methods for battery management system functionalities: State of charge estimation algorithms. J. Energy Storage 2016, 7, 38–51. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Covariance SOC | 2.5 × 10 |
| Covariance | 0 |
| Process noise SOC | 1 |
| Process noise | 1 |
| Measurement noise | 1 × 10 |
| Sensor | Value |
|---|---|
| Voltage resolution (LM324N) | 100 mV |
| Current resolution (ACS-712) | 40 mA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chellal, A.A.; Gonçalves, J.; Lima, J.; Pinto, V.; Megnafi, H. Design of an Embedded Energy Management System for Li–Po Batteries Based on a DCC-EKF Approach for Use in Mobile Robots. Machines 2021, 9, 313. https://doi.org/10.3390/machines9120313
Chellal AA, Gonçalves J, Lima J, Pinto V, Megnafi H. Design of an Embedded Energy Management System for Li–Po Batteries Based on a DCC-EKF Approach for Use in Mobile Robots. Machines. 2021; 9(12):313. https://doi.org/10.3390/machines9120313
Chicago/Turabian StyleChellal, Arezki Abderrahim, José Gonçalves, José Lima, Vítor Pinto, and Hicham Megnafi. 2021. "Design of an Embedded Energy Management System for Li–Po Batteries Based on a DCC-EKF Approach for Use in Mobile Robots" Machines 9, no. 12: 313. https://doi.org/10.3390/machines9120313
APA StyleChellal, A. A., Gonçalves, J., Lima, J., Pinto, V., & Megnafi, H. (2021). Design of an Embedded Energy Management System for Li–Po Batteries Based on a DCC-EKF Approach for Use in Mobile Robots. Machines, 9(12), 313. https://doi.org/10.3390/machines9120313