
Study on Parameters’ Influence and Optimal Design of Tuned Inerter Dampers for Seismic Response Mitigation


Abstract
:1. Introduction
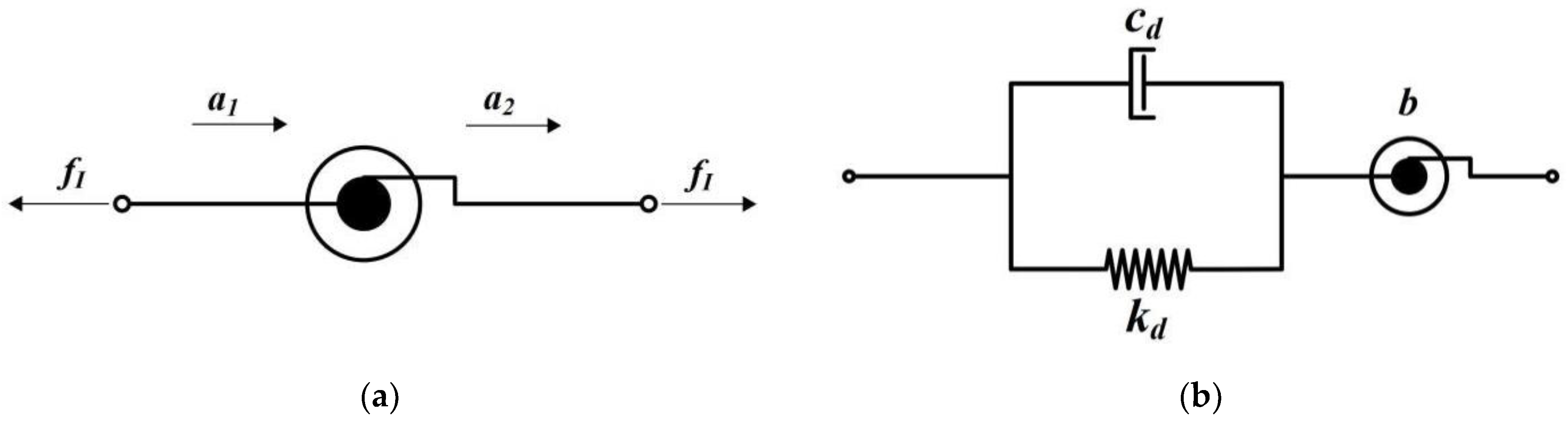
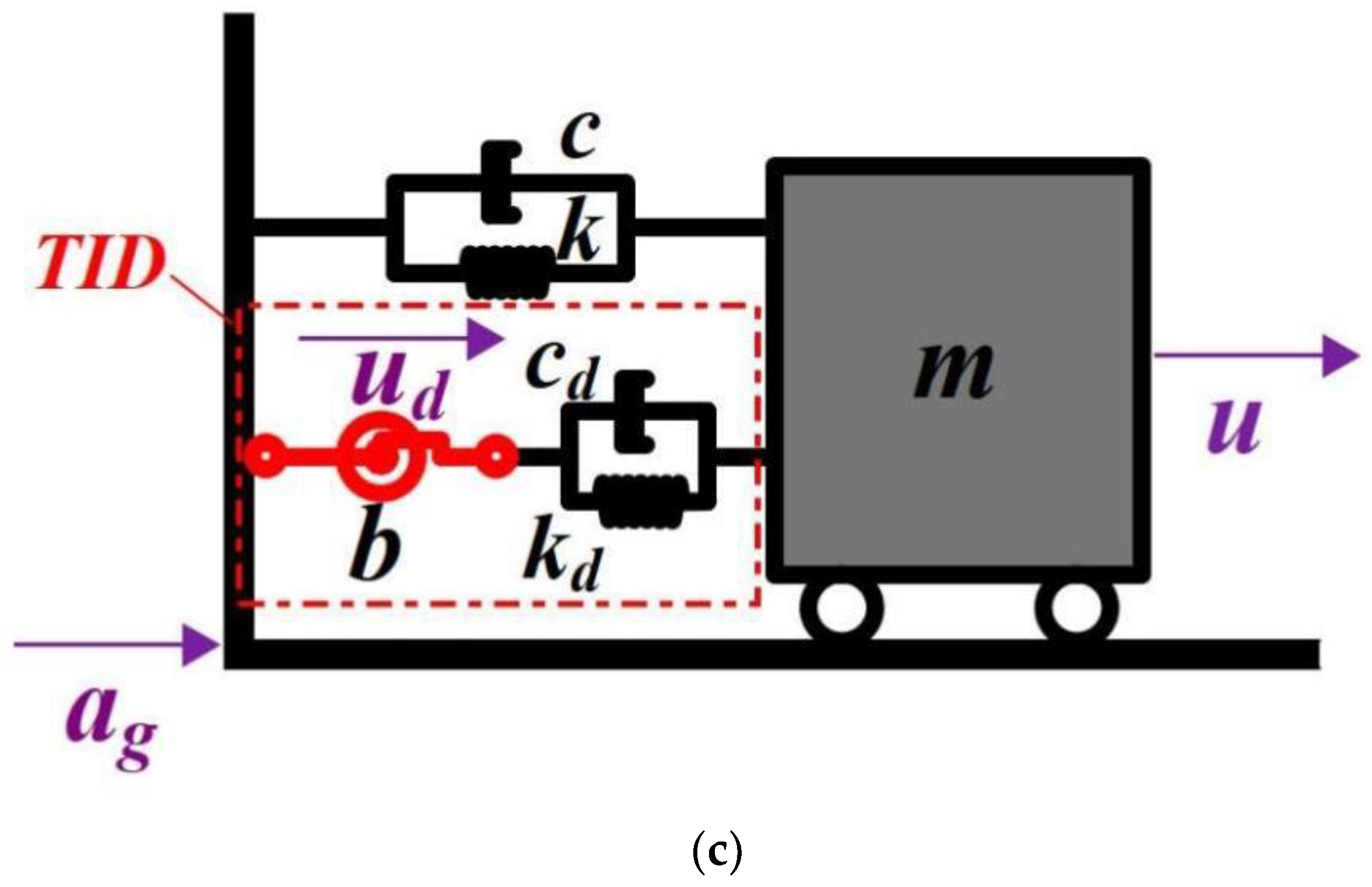
2. Motion Control Equation of TID System
3. Parametric Analysis
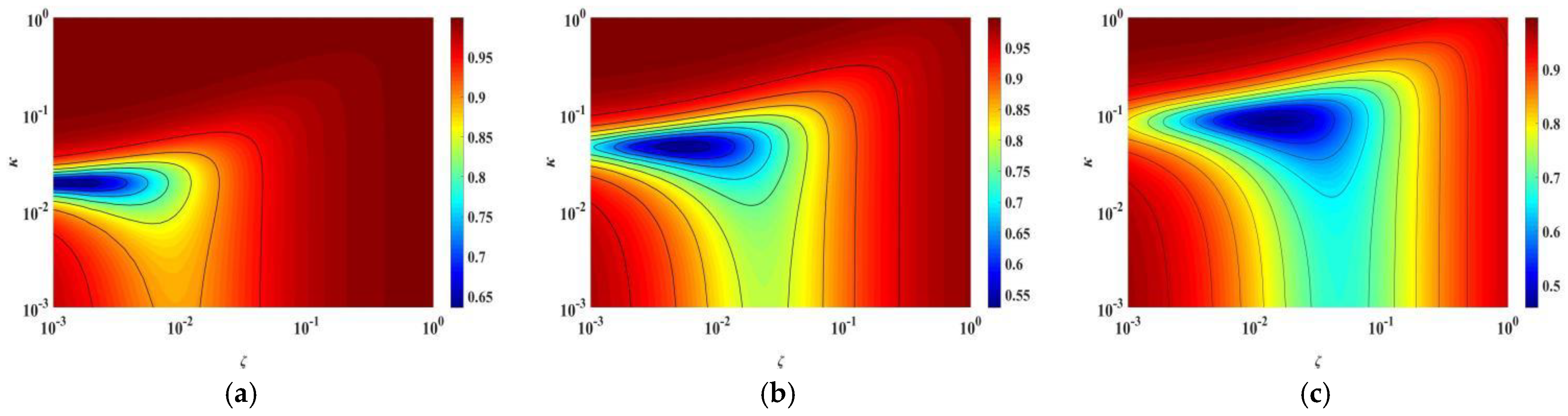
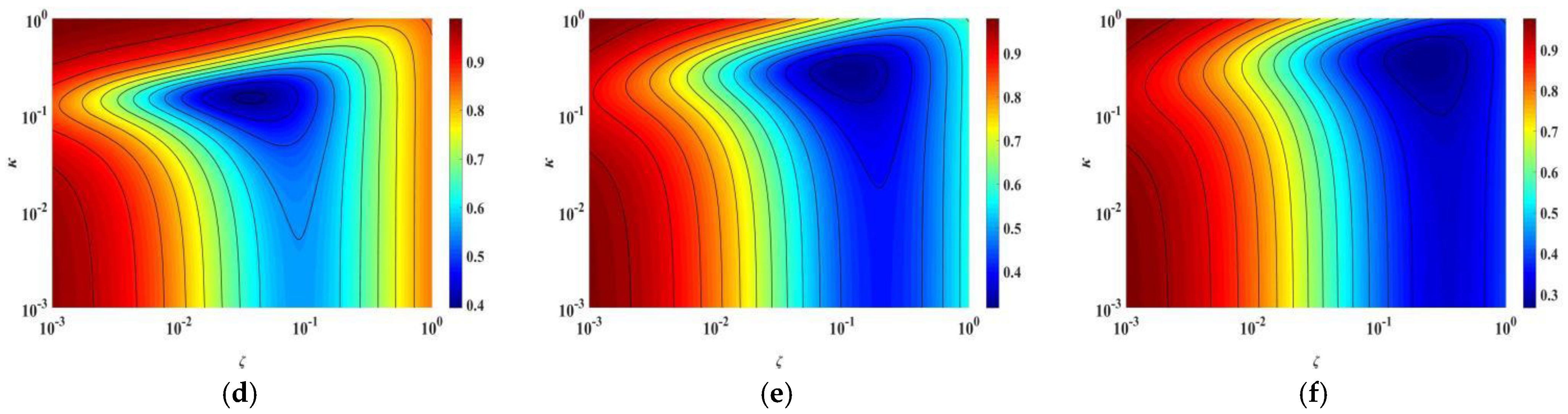
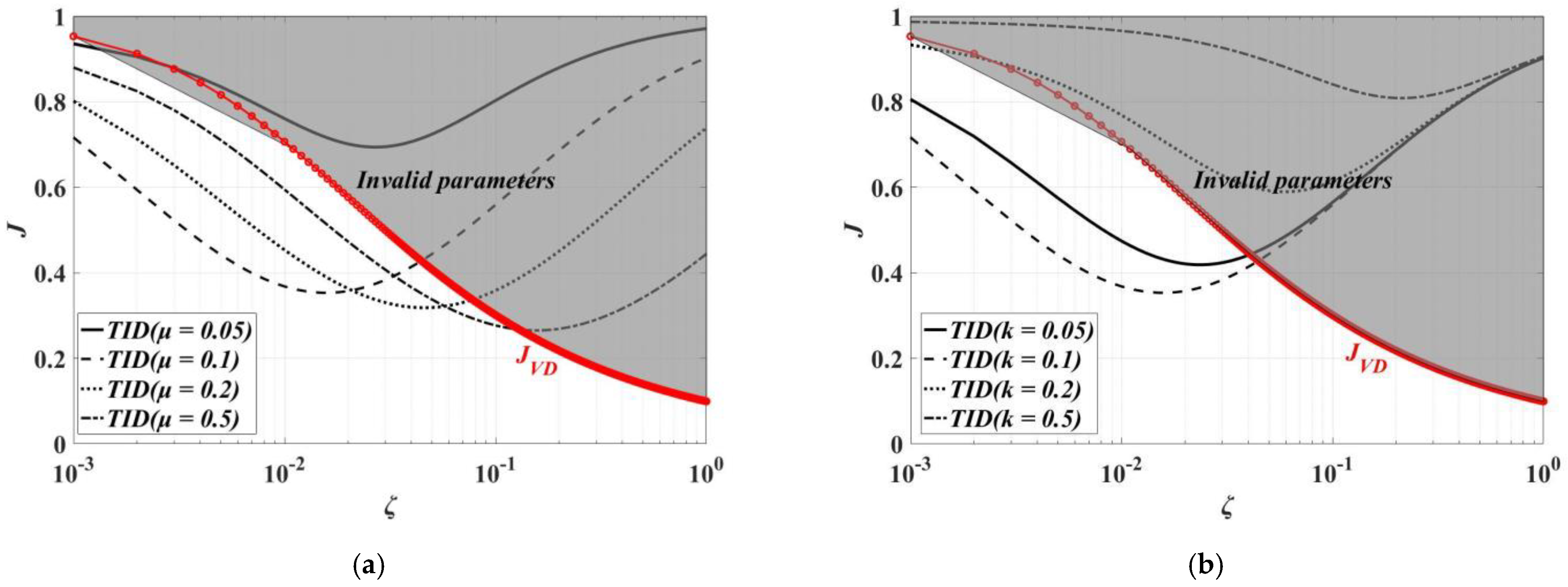
3.1. Parametric Analysis of TID Based on Closed-Form Solution J
3.2. Parameter Optimization of TID by Using Closed-Form Solution Method
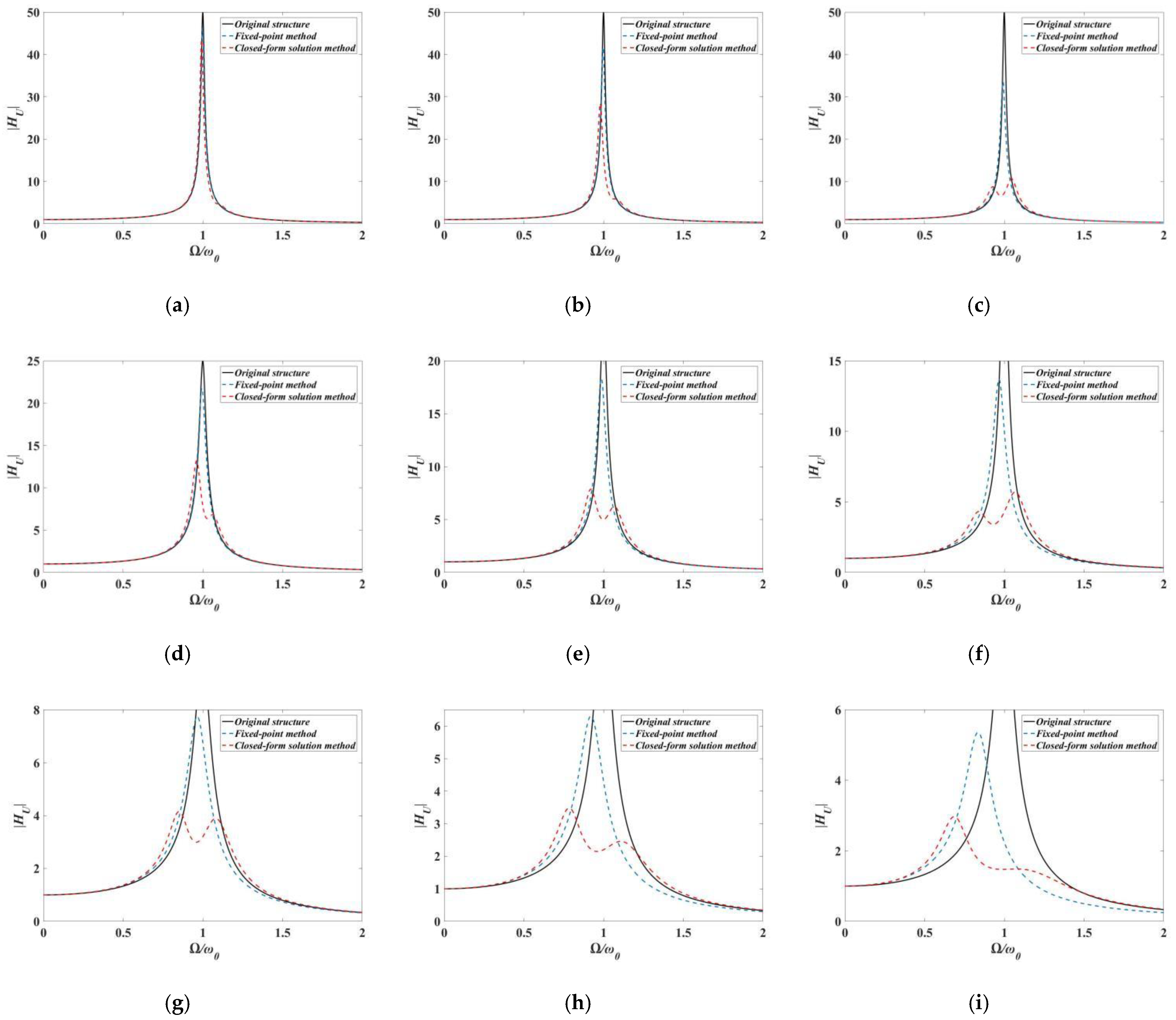
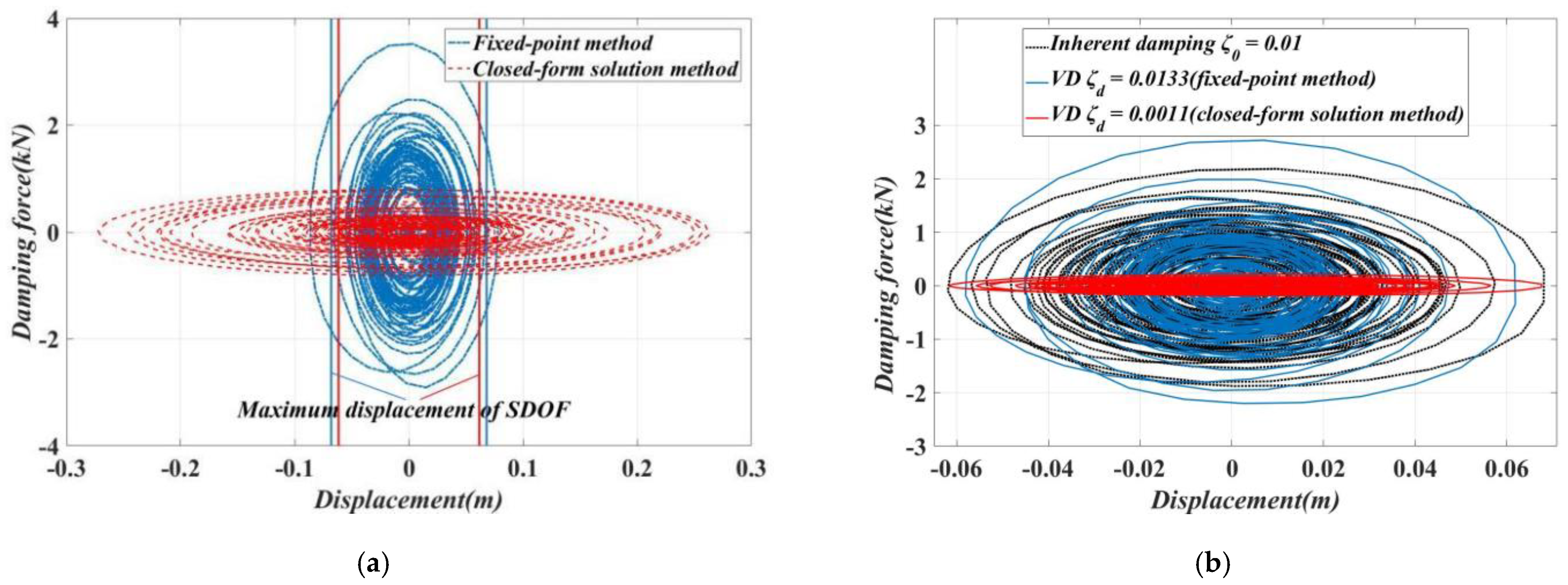
3.3. Applicability Analysis of Closed-Form Solution Method and Fixed-Point Method
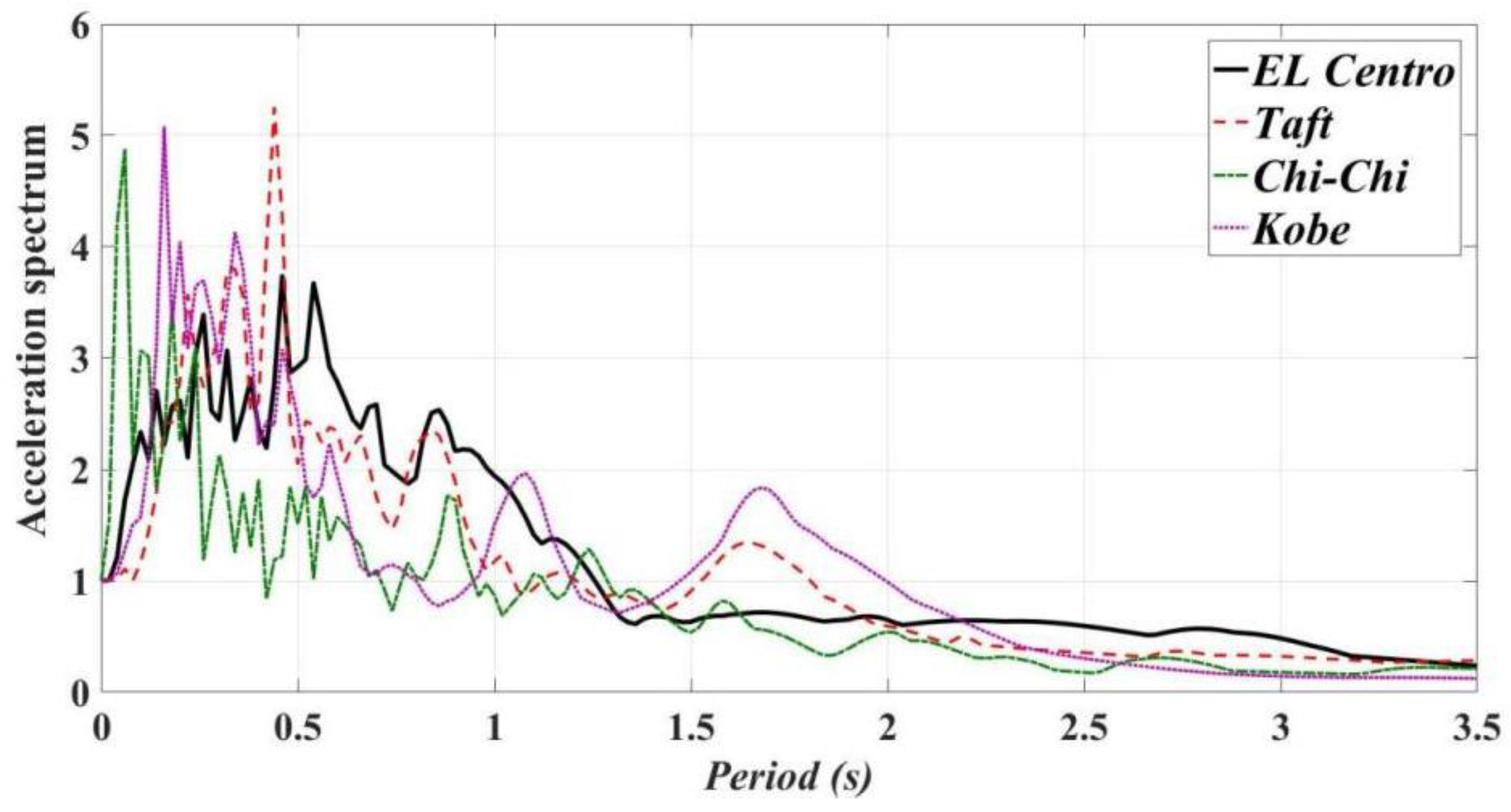
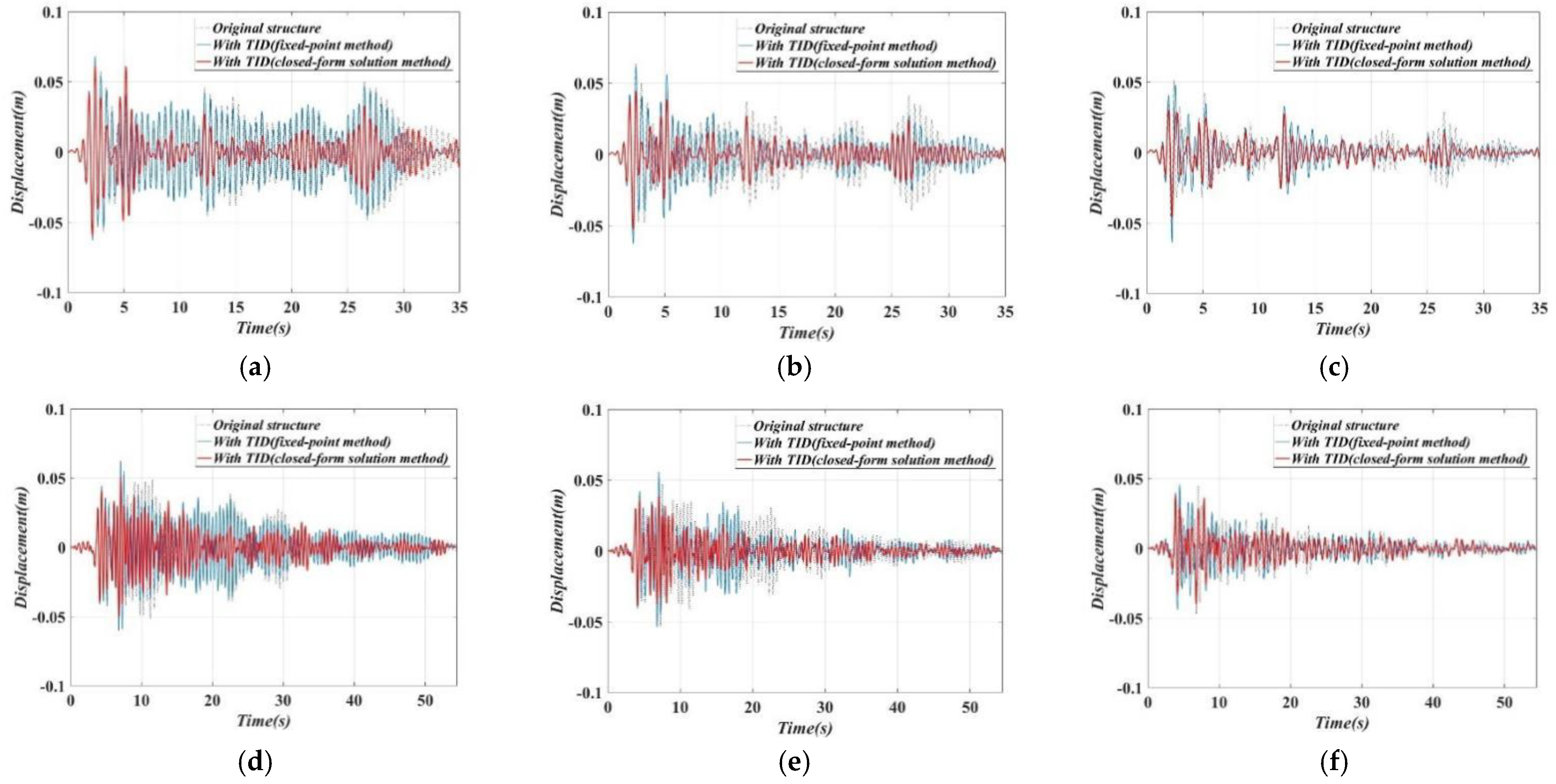
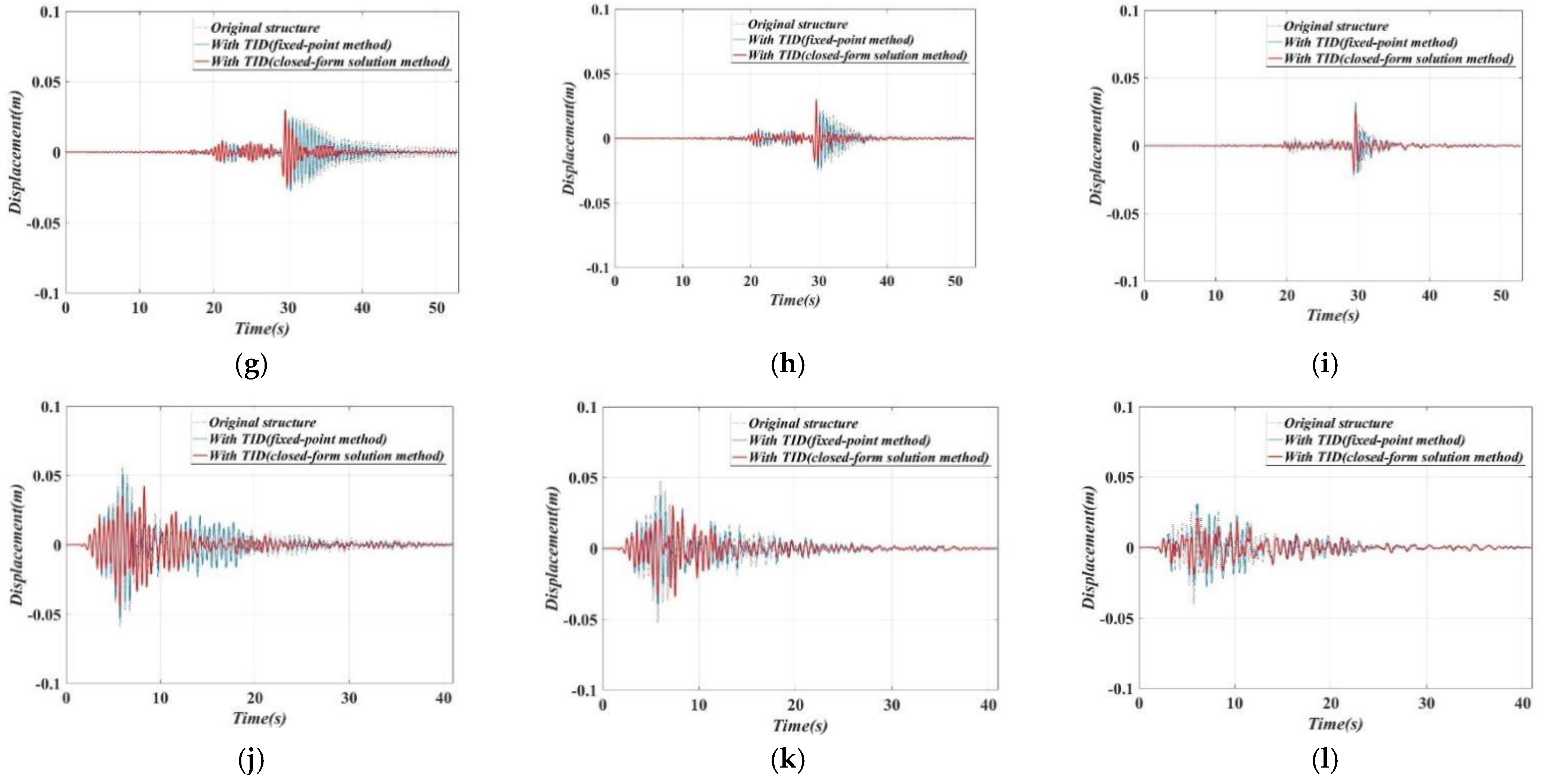
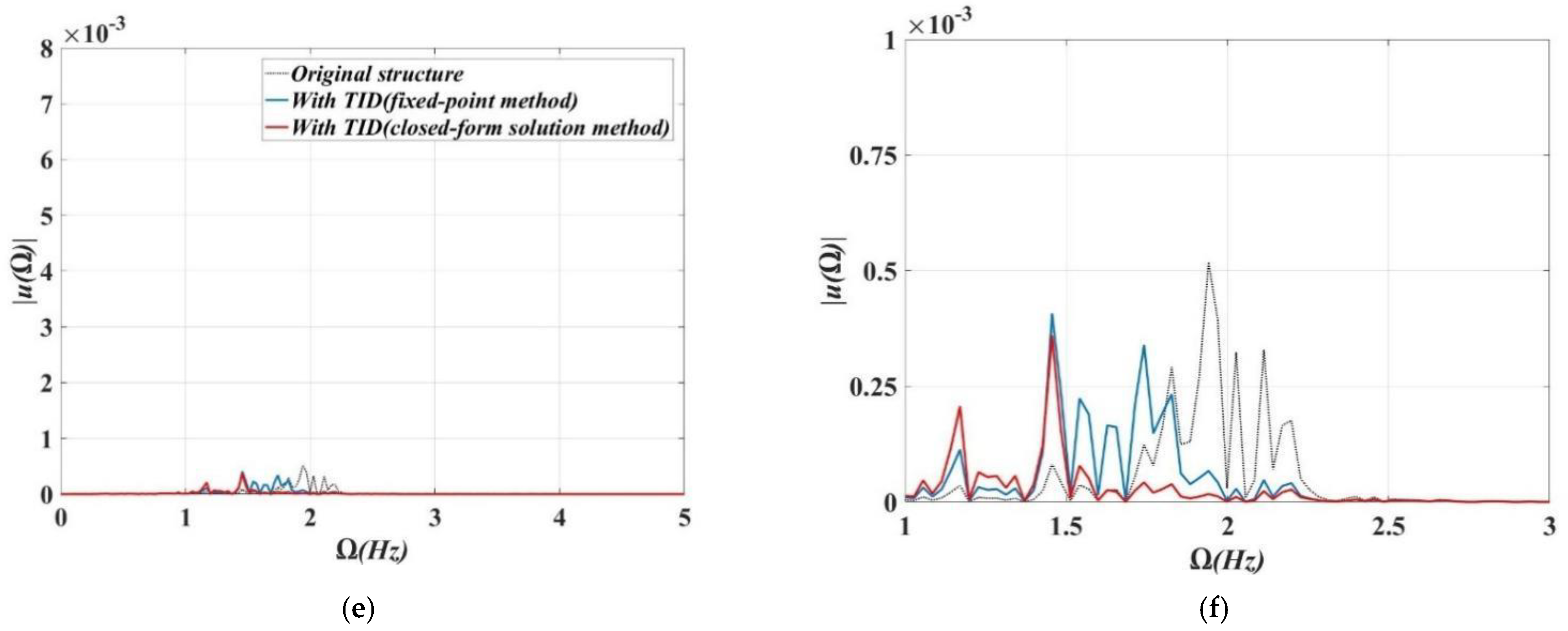
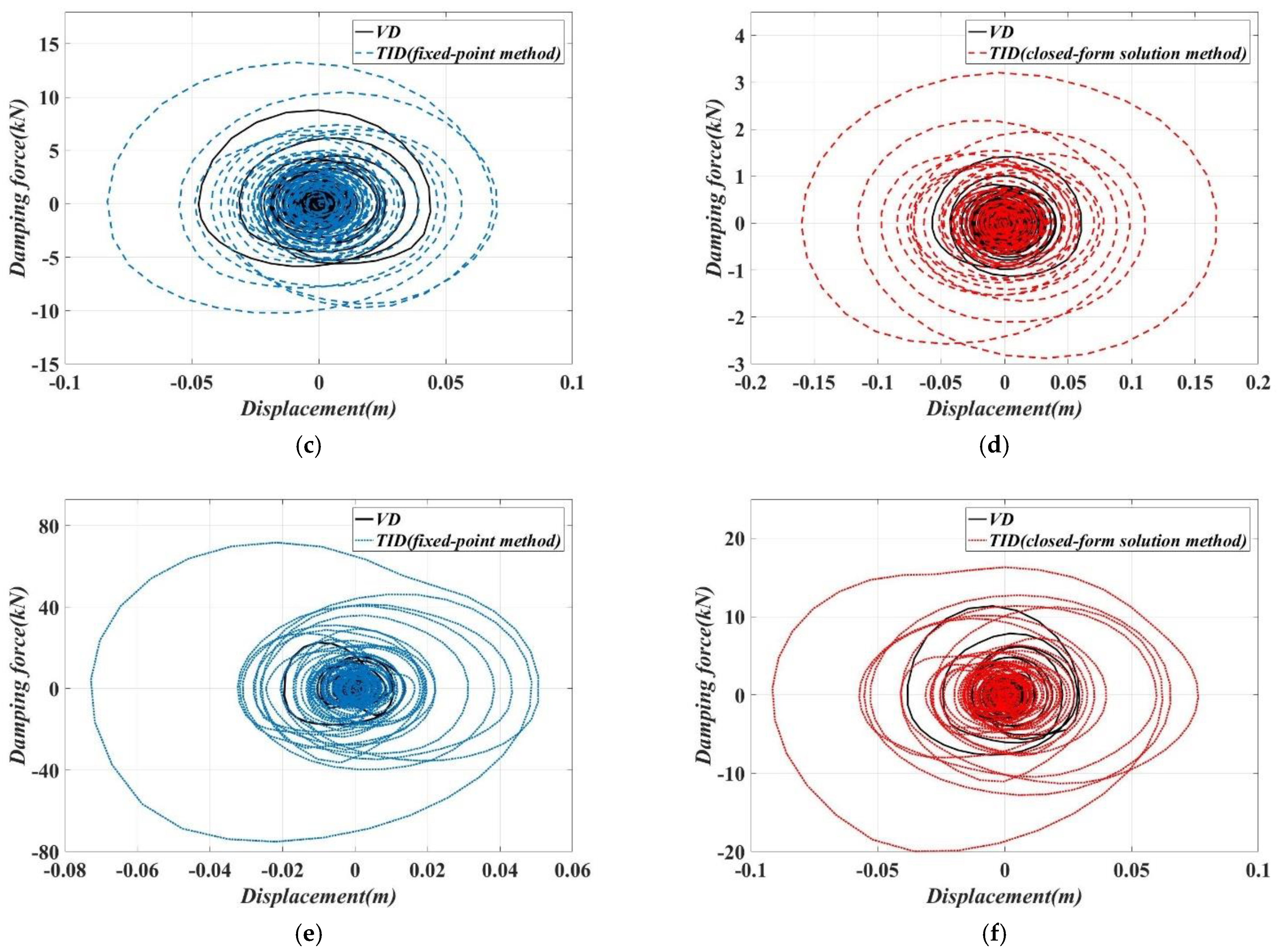
4. Seismic Responses
5. Conclusions
- The investigation on the variation patterns of invalid designed parameters of TIDs under different inherent damping ratios indicates that compared with the fixed-point method, better applicability and robustness are shown in closed-form solution method.
- The displacement mitigation ratio could be used as a target during the determination of design parameters of the TID, which meets the structural design concept based on performance demand.
- Nearly identical performances of main structures with TID can be realized using two optimal design methods; however, the additional damping ratio of the TID designed by the closed-form solution method is considerably smaller compared to that of the fixed-point method. The damping enhancement effect of the inerter element can be fully utilized when employing the proposed performance demand-based design approach.
- Considering the lower additional damping ratio and inerter–mass ratio, applications of the TID designed by the closed-form solution method can be extended and its installation made more flexible. The corresponding verification experiment study must be conducted in the near future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, M.; Zhou, F.; Tan, P.; Zhang, G.; Zhengguo, G. Seismic response of transformer and bushing isolation system and parameter analysis of isolation layer. J. Proc. CSEE 2012, 32, 166–174. [Google Scholar]
- Maleska, T.; Nowacka, J.; Beben, D. Application of EPS Geofoam to a Soil–Steel Bridge to Reduce Seismic Excitations. Geosciences 2019, 9, 448. [Google Scholar] [CrossRef] [Green Version]
- Rahmani, M.; Todorovska, M.I. Structural health monitoring of a 32-storey steel-frame building using 50 years of seismic monitoring data. Earthq. Eng. Struct. Dyn. 2021, 50, 1777–1800. [Google Scholar] [CrossRef]
- Liang, J.; Jin, L.; Todorovska, M.I.; Trifunac, M.D. Soil–structure interaction for a SDOF oscillator supported by a flexible foundation embedded in a half-space: Closed-form solution for incident plane SH-waves. Soil Dyn. Earthq. Eng. 2016, 90, 287–298. [Google Scholar] [CrossRef]
- Zhang, R.; Cao, M. Study on vibration control and parameters influence of cable inerter viscous damping system. Shock. Vib. 2022, 2022, 2983700. [Google Scholar] [CrossRef]
- Meirovitch, L. Dynamics and Control of Structures; John Wiley & Sons: Hoboken, NJ, USA, 1990. [Google Scholar]
- Soong, T.T.; Dargush, G.F. Passive Energy Dissipation Systems in Structural Engineering; Wiley: Chichester, UK, 1997. [Google Scholar]
- Housner, G.; Bergman, L.A.; Caughey, T.K.; Chassiakos, A.G.; Claus, R.O.; Masri, S.F.; Skelton, R.E.; Soong, T.; Spencer, B.; Yao, J.T. Structural control: Past, present, and future. J. Eng. Mech. 1997, 123, 897–971. [Google Scholar] [CrossRef]
- Kareem, A.; Kijewski, T.; Tamura, Y. Mitigation of motions of tall buildings with specific examples of recent applications. Wind Struct. Int. J. 1999, 2, 201–251. [Google Scholar] [CrossRef] [Green Version]
- McNamara, R.J. Tuned Mass Dampers for Buildings. J. Struct. Div. 1977, 103, 1785–1798. [Google Scholar] [CrossRef]
- Hwang, J.S.; Lee, S.H.; Min, K.W.; Kim, J. Equivalent damping of a structure with vibration control devices subjected to wind loads. Wind. Struct. 2003, 6, 249–262. [Google Scholar] [CrossRef]
- Losanno, D.; Calabrese, A.; Madera-Sierra, I.E.; Spizzuoco, M.; Marulanda, J.; Thomson, P.; Serino, G. Recycled versus natural-rubber fiber-reinforced bearings for base isolation: Review of the experimental findings. J. Earthq. Eng. 2020, 1, 1–20. [Google Scholar] [CrossRef]
- Losanno, D.; Palumbo, F.; Calabrese, A.; Barrasso, T.; Vaiana, N. Preliminary Investigation of Aging Effects on Recycled Rubber Fiber Reinforced Bearings (RR-FRBs). J. Earthq. Eng. 2021, 1, 1–18. [Google Scholar] [CrossRef]
- Kelly, J.M. Seismic isolation for earthquake-resistant design. In Earthquake-Resistant Design with Rubber; Springer: London, UK, 1997; pp. 1–18. [Google Scholar]
- Vaiana, N.; Spizzuoco, M.; Serino, G. Wire rope isolators for seismically base-isolated lightweight structures: Experimental characterization and mathematical modeling. Eng. Struct. 2017, 140, 498–514. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Reinhorn, A.M.; Constantinou, M.C. Nonlinear dynamic analysis of 3-D-base-isolated structures. J. Struct. Eng. 1991, 117, 2035–2054. [Google Scholar] [CrossRef] [Green Version]
- Pellecchia, D.; Lo Feudo, S.; Vaiana, N.; Dion, J.L.; Rosati, L. A procedure to model and design elastomeric-based isolation systems for the seismic protection of rocking art objects. Comput.-Aided Civ. Infrastruct. Eng. 2021, 1–18, 1093–9687. [Google Scholar] [CrossRef]
- Simiu, E.; Scanlan, R. Wind Effects on Structures; Wiley: Hobeken, NJ, USA, 1996. [Google Scholar]
- Tian, L.; Ma, R.; Pan, H.; Qiu, C.; Li, W. Wind-induced progressive collapse analysis of long span transmission tower-line system considering the member buckling effect. Adv. Struct. Eng. 2019, 22, 30–41. [Google Scholar] [CrossRef]
- Jiang, Y.Y.; Zhao, Z.P.; Zhang, R.F.; De Domenico, D.; Pan, C. Optimal design based on analytical solution for storage tank with inerter isolation system. Soil Dyn. Earthq. Eng. 2020, 129, 105924. [Google Scholar] [CrossRef]
- Sadeghian, M.A.; Yang, J.; Wang, F.; Wang, X. Structural vibration control using novel adaptive tuned mass inertance damper (ATMID) with adjustable inertance. Appl. Sci. 2022, 12, 4028. [Google Scholar] [CrossRef]
- Brzeski, P.; Lazarek, M.; Perlikowski, P. Influence of variable damping coefficient on efficiency of TMD with inerter. Energies 2020, 13, 6175. [Google Scholar] [CrossRef]
- Yu, N.; Ouyang, H.; Zhang, J.; Ye, J.; Yan, Q.; Zheng, X. Performance analyses of passive vibration isolator with parallel connection of quasi-zero stiffness and inerter dampers. Appl. Sci. 2020, 10, 6894. [Google Scholar] [CrossRef]
- Liu, X.; Yang, Y.; Sun, Y.; Zhong, Y.; Zhou, L.; Li, S.; Wu, C. Tuned-mass-damper-inerter performance evaluation and optimal design for transmission line under harmonic excitation. Buildings 2022, 12, 435. [Google Scholar] [CrossRef]
- Weber, F.; Huber, P.; Borchsenius, F.; Braun, C. Performance of TMDI for tall building damping. Actuators 2020, 9, 139. [Google Scholar] [CrossRef]
- Zhang, R.; Cao, M.; Huang, J. Study on seismic response and parameter influence in a transformer-bushing with inerter isolation system. Buildings 2022, 12, 530. [Google Scholar] [CrossRef]
- Lee, S.H.; Min, K.W.; Hwang, J.S.; Kim, J. Evaluation of equivalent damping ratio of a structure with added dampers. Eng. Struct. 2004, 26, 335–346. [Google Scholar] [CrossRef]
- Smith, M.C.; Wang, F.C. Performance benefits in passive vehicle suspensions employing inerters. Veh. Syst. Dyn. 2004, 42, 235–257. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.C. Synthesis of mechanical networks: The inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef] [Green Version]
- Ikago, K.; Saito, K.; Inoue, N. Seismic control of single-degree-of-freedom structure using tuned viscous mass damper. Earthq. Eng. Struct. Dyn. 2012, 41, 453–474. [Google Scholar] [CrossRef]
- Pan, C.; Zhang, R.; Luo, H.; Li, C.; Shen, H. Demand-based optimal design of oscillator with parallel-layout viscous inerter damper. Struct. Control Health Monit. 2018, 25, e2051. [Google Scholar] [CrossRef]
- Pan, C.; Zhang, R. Design of structure with inerter system based on stochastic response mitigation ratio. Struct. Control Health Monit. 2018, 25, e2169. [Google Scholar] [CrossRef]
- Hwang, J.S.; Kim, J.; Kim, Y.M. Rotational inertia dampers with toggle bracing for vibration control of a building structure. Eng. Struct. 2007, 29, 1201–1208. [Google Scholar] [CrossRef]
- Zhang, R.F.; Zhao, Z.P.; Dai, K.S. Seismic response mitigation of a wind turbine tower using a tuned parallel inerter mass system. Eng. Struct. 2019, 180, 29–39. [Google Scholar] [CrossRef]
- Zhao, Z.P.; Zhang, R.F.; Wierschem, N.E.; Jiang, Y.Y.; Pan, C. Displacement mitigationoriented design and mechanism for inerter-based isolation system. J. Vib. Control 2021, 27, 1991–2003. [Google Scholar] [CrossRef]
- Gao, H.; Wang, H.; Li, J.; Wang, Z.; Liang, R.; Xu, Z.; Ni, Y. Optimum design of viscous inerter damper targeting multi-mode vibration mitigation of stay cables. Eng. Struct. 2021, 226, 111375. [Google Scholar] [CrossRef]
- De Domenico, D.; Impollonia, N.; Ricciardi, G. Soil-dependent optimum design of a new passive vibration control system combining seismic base isolation with tuned inerter damper. Soil Dynam. Earthq. Eng. 2018, 105, 37–53. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. An enhanced base isolation system equipped with optimal tuned mass damper inerter (TMDI). Earthq. Eng. Struct. Dyn. 2018, 47, 1169–1192. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. Optimal design and seismic performance of tuned mass damper inerter (TMDI) for structures with nonlinear base isolation systems. Earthq. Eng. Struct. Dyn. 2018, 47, 2539–2560. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, R.; Jiang, Y.; Pan, C. Seismic response mitigation of structures with a friction pendulum inerter system. Eng. Struct. 2019, 193, 110–120. [Google Scholar] [CrossRef]
- Nakamura, Y.; Fukukita, A.; Tamura, K.; Yamazaki, I.; Matsuoka, T.; Hiramoto, K.; Sunakoda, K. Seismic response control using electromagnetic inertial mass dampers. Earthq. Eng. Struct. Dyn. 2014, 43, 507–527. [Google Scholar] [CrossRef]
- Wang, F.-C.; Chen, C.-W.; Liao, M.-K.; Hong, M.-F. Performance analyses of building suspension control with inerters. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 3786–3791. [Google Scholar]
- Lazar, I.F.; Wagg, D.J.; Neild, S.A. An inerter vibration isolation system for the control of seismically excited structures. In Proceedings of the International Conference on Urban Earthquake Engineering, Tokyo, Japan, 1–2 March 2013. [Google Scholar]
- Luo, H.; Zhang, R.; Weng, D. Weng, Mitigation of liquid sloshing in storage tanks by using a hybrid control method. Soil Dynam. Earthq. Eng. 2016, 90, 183–195. [Google Scholar] [CrossRef]
- Marian, L.; Giaralis, A. Optimal design of a novel tuned mass-dampereinerter (TMDI) passive vibration control configuration for stochastically support-excited structural systems. Probabilist. Eng. Mech. 2014, 38, 156–164. [Google Scholar] [CrossRef]
- Hashimoto, T.; Fujita, K.; Tsuji, M.; Takewaki, I. Innovative base-isolated building with large mass-ratio TMD at basement for greater earthquake resilience. Future Cities Environ. 2015, 1, 9. [Google Scholar] [CrossRef]
- Pietrosanti, D.; De Angelis, M.; Basili, M. Optimal design and performance evaluation of systems with tuned mass damper inerter (TMDI). Earthq. Eng.Struct. Dyn. 2017, 46, 1367–1388. [Google Scholar] [CrossRef]
- Sugimura, Y.; Goto, W.; Tanizawa, H.; Saito, K.; Nimomiya, T. Response control effect of steel building structure using tuned viscous mass damper. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 24–28 September 2012. [Google Scholar]
- Kurata, M.; Leon, R.T.; Desroches, R. Rapid seismic rehabilitation strategy: Concept and testing of cable bracing with couples resisting damper. J. Struct. Eng. 2012, 138, 354–362. [Google Scholar] [CrossRef]
- Xie, L.; Ban, X.; Xue, S.; Ikago, K.; Kang, J.; Tang, H. Theoretical study on a cable-bracing inerter system for seismic mitigation. Appl. Sci. 2019, 9, 4096. [Google Scholar] [CrossRef] [Green Version]
- Xue, S.; Kang, J.; Xie, L.; Zhang, R.; Ban, X. Cross-layer installed cable-bracing inerter system for MDOF structure seismic response control. Appl. Sci. 2020, 10, 5914. [Google Scholar] [CrossRef]
- Wang, H.; Gao, H.; Li, J.; Wang, Z.; Ni, Y.; Liang, R. Optimum design and performance evaluation of the tuned inerter-negative-stiffness damper for seismic protection of single-degree-of-freedom structures. Int. J. Mech. Sci. 2021, 212, 106805. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, M.Z.; Shu, Z.; Huang, L. Analysis and optimisation for inerter-based isolators via fixed-point theory and algebraic solution. J. Sound Vib. 2015, 346, 17–36. [Google Scholar] [CrossRef] [Green Version]
- Den Hartog, J.P. Mechanical Vibrations, 4th ed.; McGraw-Hill: New York, NY, USA, 1956. [Google Scholar]
- Baduidana, M.; Kenfack-Jiotsa, A. Optimal design of inerter-based isolators minimizing the compliance and mobility transfer function versus harmonic and random ground acceleration excitation. J. Vib. Control 2020, 27, 107754632094017. [Google Scholar] [CrossRef]
- Garrido, H.; Curadelli, O.; Ambrosini, D. Improvement of tuned mass damper by using rotational inertia through tuned viscous mass damper. Eng. Struct. 2013, 56, 2149–2153. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ζ0 | Closed-Form Solution Method | Fixed-Point Method | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Jt | μ | κ | ζ | JVD | μ | κ | ζ | JVD | |
| 0.01 | 0.7 | 0.0026 | 0.0031 | 0.0001 | 0.9901 | 0.0026 | 0.0025 | 0.0020 | 0.9117 |
| 0.6 | 0.0065 | 0.0073 | 0.0003 | 0.9860 | 0.0065 | 0.0073 | 0.0052 | 0.8104 | |
| 0.5 | 0.0165 | 0.0156 | 0.0010 | 0.9528 | 0.0165 | 0.0160 | 0.0134 | 0.6541 | |
| 0.02 | 0.7 | 0.0100 | 0.0105 | 0.0005 | 0.9873 | 0.0100 | 0.0098 | 0.0080 | 0.8445 |
| 0.6 | 0.0256 | 0.0250 | 0.0020 | 0.9532 | 0.0256 | 0.0243 | 0.0210 | 0.6984 | |
| 0.5 | 0.0647 | 0.0533 | 0.0071 | 0.8589 | 0.0647 | 0.0570 | 0.0554 | 0.5151 | |
| 0.05 | 0.7 | 0.0608 | 0.0533 | 0.0068 | 0.9381 | 0.0608 | 0.0541 | 0.0521 | 0.6991 |
| 0.6 | 0.1559 | 0.1267 | 0.0264 | 0.8089 | 0.1559 | 0.1167 | 0.1462 | 0.5048 | |
| 0.5 | 0.3935 | 0.2705 | 0.0934 | 0.5905 | 0.3935 | 0.2027 | 0.4508 | 0.3160 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Huang, J.; Cao, M.; Luo, Q.; Guo, X. Study on Parameters’ Influence and Optimal Design of Tuned Inerter Dampers for Seismic Response Mitigation. Buildings 2022, 12, 558. https://doi.org/10.3390/buildings12050558
Zhang R, Huang J, Cao M, Luo Q, Guo X. Study on Parameters’ Influence and Optimal Design of Tuned Inerter Dampers for Seismic Response Mitigation. Buildings. 2022; 12(5):558. https://doi.org/10.3390/buildings12050558
Chicago/Turabian StyleZhang, Ruoyu, Jizhong Huang, Meigen Cao, Qingyang Luo, and Xiuwei Guo. 2022. "Study on Parameters’ Influence and Optimal Design of Tuned Inerter Dampers for Seismic Response Mitigation" Buildings 12, no. 5: 558. https://doi.org/10.3390/buildings12050558
APA StyleZhang, R., Huang, J., Cao, M., Luo, Q., & Guo, X. (2022). Study on Parameters’ Influence and Optimal Design of Tuned Inerter Dampers for Seismic Response Mitigation. Buildings, 12(5), 558. https://doi.org/10.3390/buildings12050558