
Review on Vibration Monitoring and Its Application during Shield Tunnel Construction Period


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Source of Shield Vibration Signal
2.1. The Internal Excitation
2.2. The External Excitation
3. Vibration Monitoring Methods and Techniques
3.1. Direct Monitoring within the Shield
3.2. Indirect Monitoring within the Shield
3.3. Monitoring Outside the Shield
4. Applications of Shield Vibration Signal
4.1. Identifying Equipment Faults
4.2. Predicting Geologic Features
4.3. Evaluating Disturbances to Surrounding Buildings
5. Discussion
6. Conclusions
- (1)
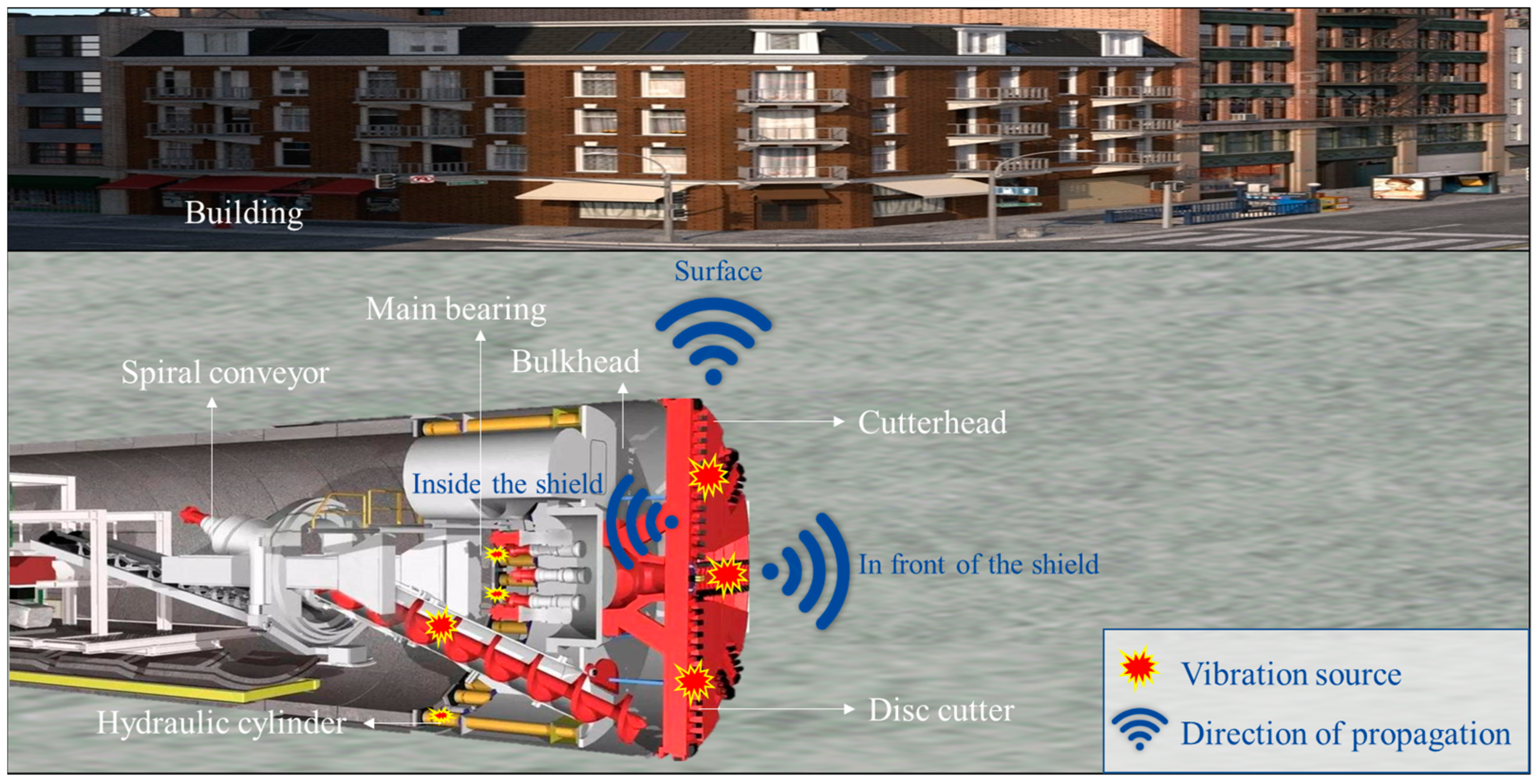
- Vibration will inevitably be generated during shield tunneling, and the vibration signals can be classified into mechanical vibration caused by internal excitation and forced vibration caused by external excitation, according to the causes. The latter is more intense than the former, and is affected by the ground conditions, which is the focus of research in the field of geotechnical engineering. The vibration response characteristics are affected by the structure of the shield machine and the digging parameters, and the shield vibration is different under different working conditions.
- (2)
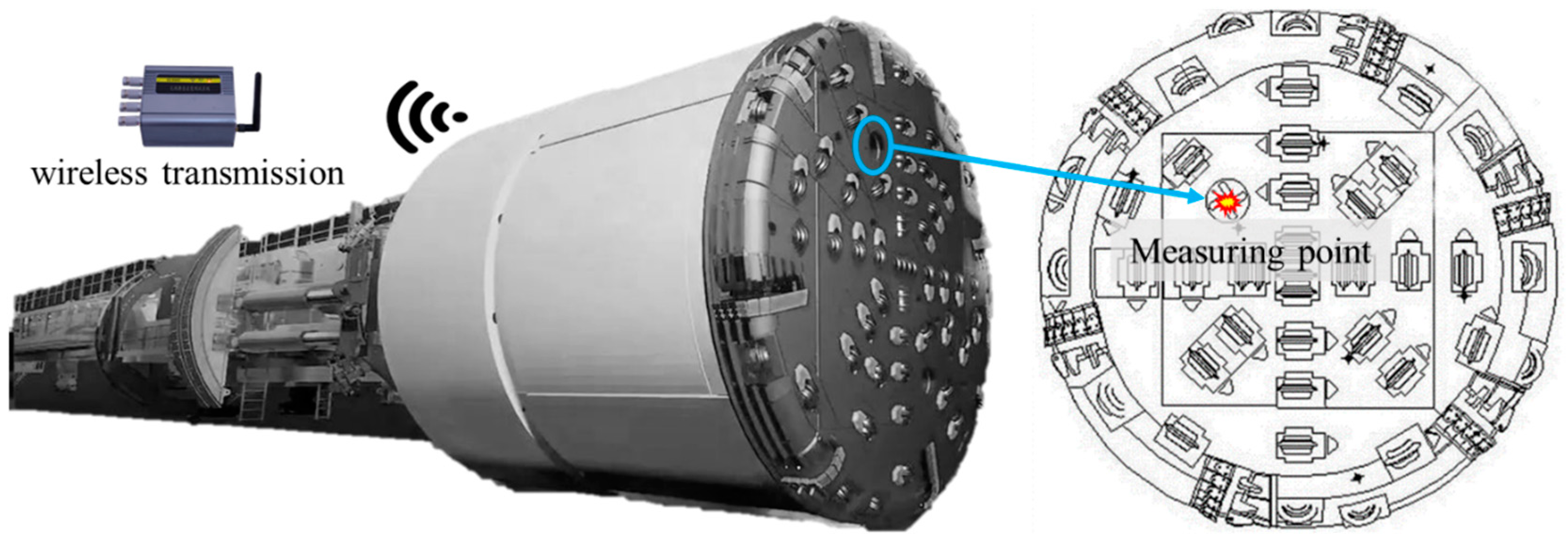
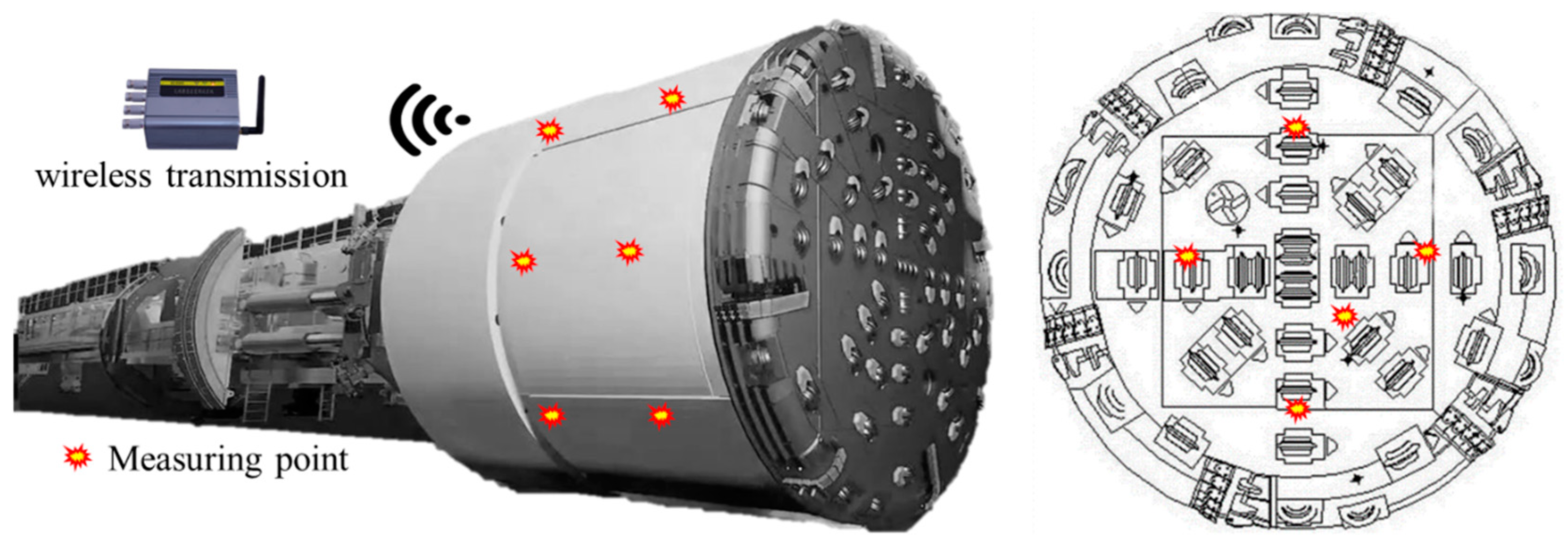
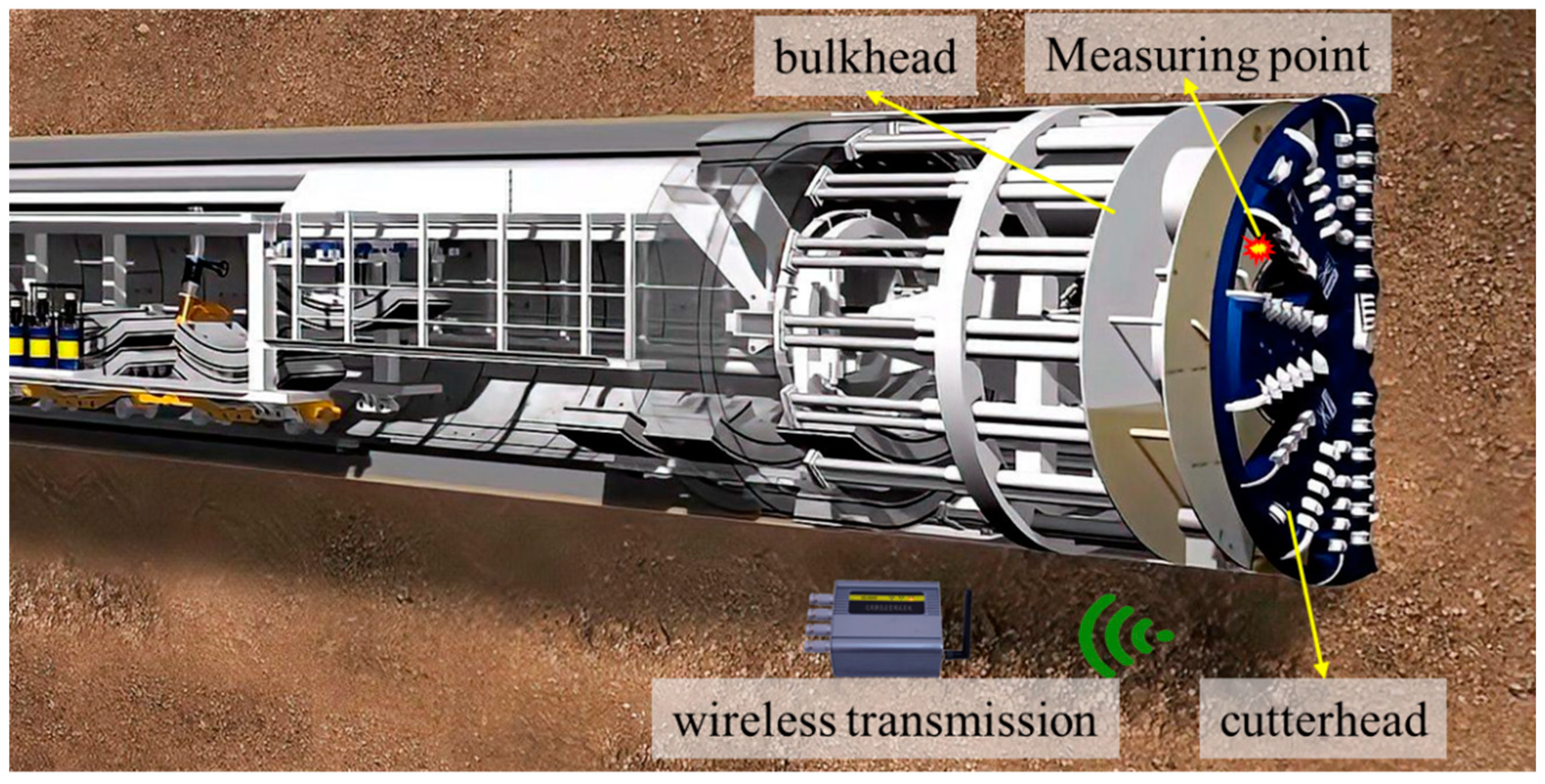
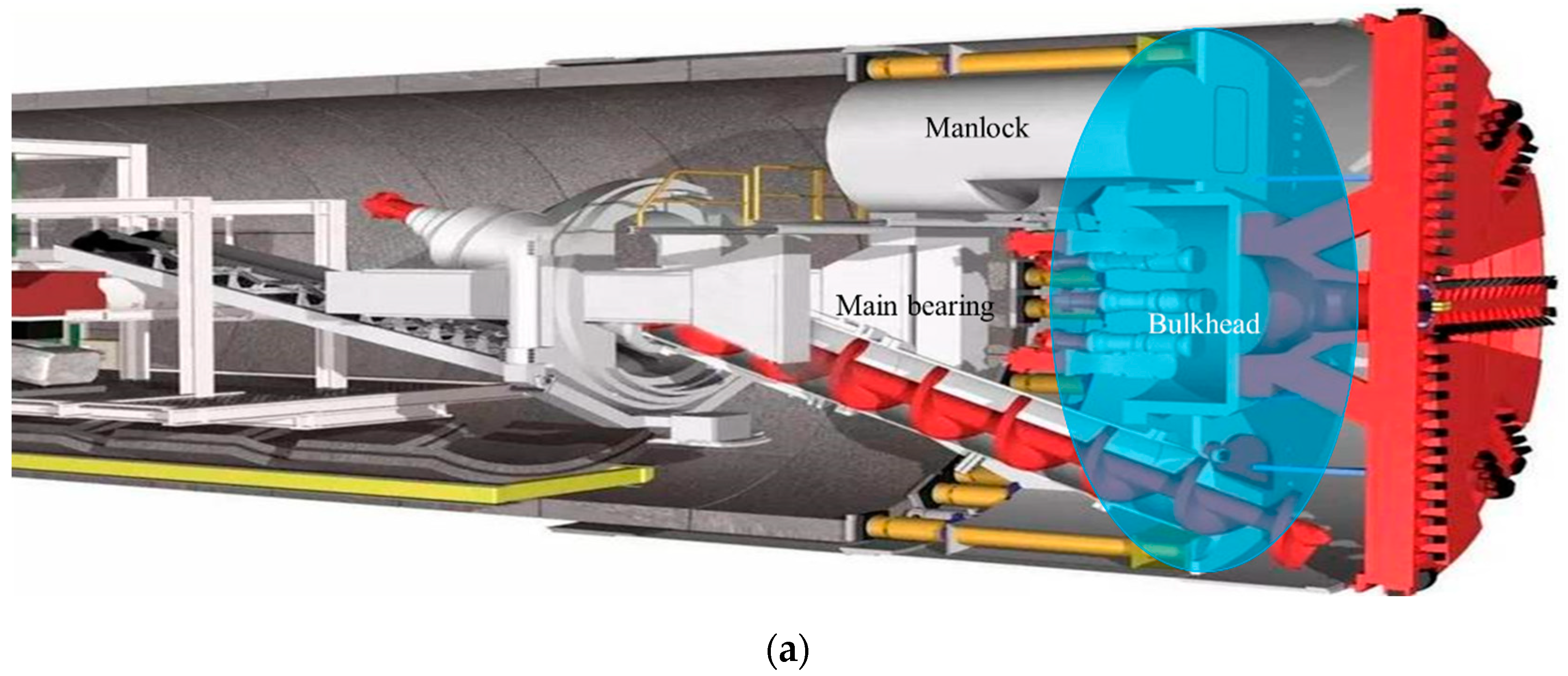
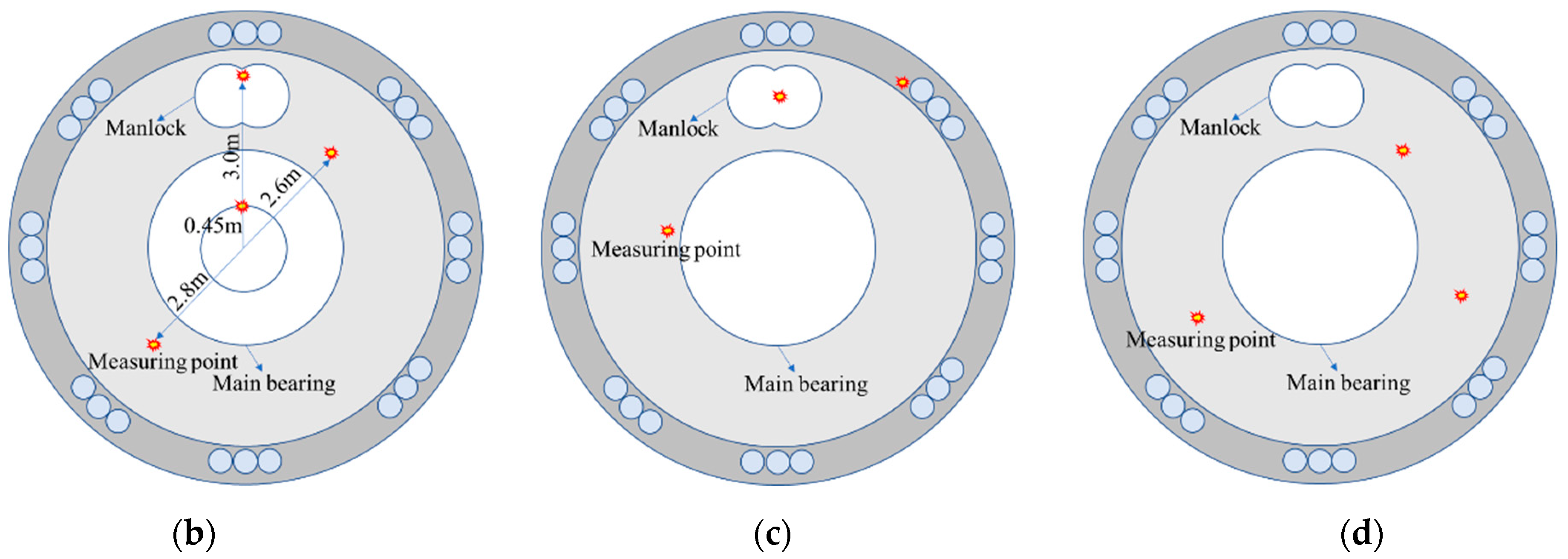
- Vibration monitoring methods include direct/indirect monitoring inside the shield machine and monitoring outside the shield machine. The signals collected by the sensors installed on the bulkhead can reflect the vibration characteristics of the cutterhead to a certain extent. Installing sensors on the cutterhead is the most direct and effective method, but it faces the problems of the short life of the sensors and the difficulty of signal transmission. With the development of material properties and communication technology, this problem is expected to be solved. The external monitoring of the shield is mainly based on the relative position of the building and the shield tunnel to determine the monitoring points.
- (3)
- Processing the raw vibration signals by time–frequency analysis methods can extract the effective feature indexes in them, thus realizing the diagnosis of shield faults, the identification of geological features, and the assessment of the impact on buildings. Signal processing technology seriously affects the ability to extract the hidden information in the signal. Therefore, with the development of information technology, shield vibration signals may be applied in more aspects.
- (4)
- Intelligent decision-making and automated digging is the ultimate goal in the field of shield construction. The combination of vibration signal and artificial intelligence will be a hotspot for future research. With the rapid development of artificial intelligence technology, vibration signals will certainly play a greater role in the intelligent enhancement of shield tunneling, including intelligent monitoring, intelligent interpretation, intelligent diagnosis, intelligent warning and so on.
Author Contributions
Funding
Conflicts of Interest
References
- Melis, M.; Medina, L.; Rodriguez, J. Prediction and analysis of subsidence induced by shield tunnelling in the Madrid Metro extension. Can. Geotech. J. 2002, 39, 1273–1287. [Google Scholar] [CrossRef]
- Liu, W.; Ding, L. Global sensitivity analysis of influential parameters for excavation stability of metro tunnel. Autom. Constr. 2020, 13, 103080. [Google Scholar] [CrossRef]
- Gao, M.; Zhang, N.; Shen, S.; Zhou, A. Real-time dynamic earth-pressure regulation model for shield tunneling by integrating GRU deep learning method with GA optimization. IEEE Access 2020, 8, 64310–64323. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, M.; Cui, M.; Xin, Y.; Wang, H.; Su, P. Prediction of Ground Subsidence Caused by Shield Tunnel Construction Under Hidden Karst Cave. Geotech. Geol. Eng. 2022, 40, 3839–3850. [Google Scholar] [CrossRef]
- Li, L.; Du, X.; Zhou, J. Numerical Simulation of Site Deformation Induced by Shield Tunneling in Typical Upper-Soft-Lower-Hard Soil-Rock Composite Stratum Site of Changchun. KSCE J. Civ. Eng. 2020, 24, 3156–3168. [Google Scholar] [CrossRef]
- Li, L.; Han, Y.; Wang, J.; Jin, Q.; Xiong, Y.; Chong, J.; Ba, X.; Fang, Z.; Wang, K. Study on Critical Safety Distance between the Shield Tunnel and Front Fault Fracture Zone in Urban Metro. Geotech. Geol. Eng. 2022, 40, 5667–5683. [Google Scholar] [CrossRef]
- He, X.; Xu, Y.; Shen, S.; Zhou, A. Geological environment problems during metro shield tunnelling in Shenzhen, China. Arab. J. Geosci. 2020, 13, 87. [Google Scholar] [CrossRef]
- Qiu, Z.; Yuan, X.; Wang, D.; Fan, S.; Wang, Q. Physical model driven fault diagnosis method for shield Machine hydraulic system. Measurement 2023, 220, 113436. [Google Scholar] [CrossRef]
- Zhang, Q.; Hou, Z.; Huang, G.; Cai, Z.; Kang, Y. Mechanical characterization of the load distribution on the cutterhead-ground interface of shield tunneling machines. Tunn. Undergr. Space Technol. 2015, 47, 106–113. [Google Scholar] [CrossRef]
- Rostami, J.; Chang, S. A Closer Look at the Design of Cutterheads for Hard Rock Tunnel-Boring Machines. Engineering 2017, 6, 892–904. [Google Scholar] [CrossRef]
- Wu, H.; Huo, J.; Meng, Z.; Xue, L.; Xie, L.; Zhang, Z. Load characteristics study with a multi-coupling dynamic model for TBM supporting system based on a field strain test. Tunn. Undergr. Space Technol. 2019, 91, 103016. [Google Scholar] [CrossRef]
- Liu, M.; Liao, S.; Yang, Y.; Men, Y.; He, J.; Huang, Y. Tunnel boring machine vibration-based deep learning for the ground identification of working faces. J. Rock Mech. Geotech. Eng. 2021, 13, 1340–1357. [Google Scholar] [CrossRef]
- Rallu, A.; Berthoz, N.; Charlemagne, S.; Branque, D. Vibrations induced by tunnel boring machine in urban areas: In situ measurements and methodology of analysis. J. Rock Mech. Geotech. Eng. 2023, 15, 130–145. [Google Scholar] [CrossRef]
- Wei, J.; Sun, Q.; Sun, W.; Cai, J.; Zeng, J. Dynamic analysis and load-sharing characteristic of multiple pinion drives in tunnel boring machine. J. Mech. Sci. Technol. 2013, 27, 1385–1392. [Google Scholar] [CrossRef]
- Yin, L.; Miao, C.; He, G.; Bai, F.; Gong, Q. Study on the influence of joint spacing on rock fragmentation under TBM cutter by linear cutting test. Tunn. Undergr. Space Technol. 2016, 57, 137–144. [Google Scholar] [CrossRef]
- Huo, J.; Wu, H.; Ji, W. Anti-vibration design for TBM main drive system based on multi-directional coupling dynamic characteristics analysis. J. Mech. Sci. Technol. 2020, 34, 4405–4421. [Google Scholar] [CrossRef]
- Liu, W.; Zhao, H.; Lin, T.; Gao, B.; Yang, Y. Vibration characteristic analysis of gearbox based on dynamic excitation with eccentricity error. J. Mech. Sci. Technol. 2020, 34, 4545–4562. [Google Scholar] [CrossRef]
- Jones, A. A general theory for elastically constrained ball and radial roller bearings under arbitrary load and speed conditions. Trans. ASME 1960, 82, 309–320. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Ding, H.; Zhang, G.; Shao, J. Modeling method analysis of the friction torque for highspeed spindle bearing. MATEC Web Conf. 2018, 175, 03028. [Google Scholar] [CrossRef][Green Version]
- Yu, J.; Yuan, W.; Li, S.; Yao, W. Assessment of bearing dynamic characteristics by numerical modeling with effects of oil film and centrifugal deformation. Math. Probl. Eng. 2018, 2018, 1619297. [Google Scholar] [CrossRef]
- Niu, L.; Cao, H.; Xiong, X. Dynamic modeling and vibration response simulations of angular contact ball bearings with ball defects considering the three-dimensional motion of balls. Tribol. Int. 2017, 109, 26–39. [Google Scholar] [CrossRef]
- Wang, L.; Shao, Y. Fault mode analysis and detection for gear tooth crack during its propagating process based on dynamic simulation method. Eng. Fail. Anal. 2017, 71, 166–178. [Google Scholar] [CrossRef]
- Nie, Y.; Li, F.; Wang, L.; Li, J.; Sun, M.; Wang, M.; Li, J. A mathematical model of vibration signal for multistage wind turbine gearboxes with transmission path effect analysis. Mech. Mach. Theory 2022, 167, 104428. [Google Scholar] [CrossRef]
- Mishra, C.; Samantaray, A.; Chakraborty, G. Ball bearing defect models: A study of simulated and experimental fault signatures. J. Sound Vib. 2017, 400, 86–112. [Google Scholar] [CrossRef]
- Furch, J.; Nguyen, T. Simulation of Failure in Gearbox Using MSC. Adams. Acta Univ. Agric. Et Silvic. Mendel. Brun. 2017, 65, 419–428. [Google Scholar] [CrossRef]
- Guo, W.; Chen, C.; Xiao, N. Dynamic vibration feature analyses for a two-stage planetary gearbox with a varying crack using a rigid-flexible coupled model. J. Intell. Fuzzy Syst. 2018, 34, 3869–3880. [Google Scholar] [CrossRef]
- Zhang, K.; Yu, H.; Liu, Z.; Lai, X. Dynamic characteristic analysis of TBM tunnelling in mixed-face conditions. Simul. Model. Pract. Theory 2010, 18, 1019–1031. [Google Scholar] [CrossRef]
- Sun, W.; Ding, X.; Wei, J.; Zhang, A. A method for analyzing sensitivity of multi-stage planetary gear coupled modes to modal parameters. J. Vibroeng. 2015, 17, 3133–3146. [Google Scholar]
- Huang, T.; Wang, X.; Liu, H.; Yang, Y. Force analysis of an open TBM gripping-thrusting-regripping mechanism. Mech. Mach. Theory 2016, 98, 101–113. [Google Scholar] [CrossRef][Green Version]
- Chen, G.; Yang, Y.; Huang, T. Vibration analysis of open TBM gripping-thrusting-regripping mechanism. Mech. Mach. Theory 2019, 134, 95–116. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, G.; Liu, X.; Huang, T.; Yang, J. Sensitivity analysis of an open TBM gripping-thrusting-regripping mechanism based on the natural characteristics. Mech. Mach. Theory 2019, 139, 1–20. [Google Scholar] [CrossRef]
- Li, J.; Kang, B.; Sun, Y.; Huang, Y.; Guo, J.; Gao, Z. Dynamic Characteristic Analysis of the Shield Machine Three-Stage Planetary Reducer Considering Tooth Wear. J. Vib. Eng. Technol. 2023. [Google Scholar] [CrossRef]
- Evans, I.; Pomeroy, C. The strength, fracture and workability of Coal. In Pergamon Process; Pergamon Press: London, UK, 1966. [Google Scholar]
- Roxborough, F.; Phillips, H. Rock excavation by disc cutter. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1975, 12, 361–366. [Google Scholar] [CrossRef]
- Sanio, H. Prediction of the performance of disc cutters in anisotropic rock. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1985, 22, 153–161. [Google Scholar] [CrossRef]
- Rostami, J. Study of pressure distribution within the crushed zone in the contact area between rock and disc cutters. Int. J. Rock Mech. Min. Sci. 2013, 57, 172–186. [Google Scholar] [CrossRef]
- Peng, X.; Liu, Q.; Pan, Y.; Lei, G.; Wei, L.; Luo, C. Study on the influence of different control modes on TBM disc cutter performance by rotary cutting tests. Rock Mech. Rock Eng. 2018, 51, 961–967. [Google Scholar] [CrossRef]
- Pan, Y.; Liu, Q.; Peng, X.; Liu, Q.; Liu, J.; Huang, X.; Cui, X.; Cai, T. Full-scale linear cutting tests to propose some empirical formulas for TBM disc cutter performance prediction. Rock Mech. Rock Eng. 2019, 52, 4763–4783. [Google Scholar] [CrossRef]
- Balci, C. Correlation of rock cutting tests with field performance of a TBM in a highly fractured rock formation: A case study in Kozyatagi-Kadikoy metro tunnel, Turkey. Tunn. Undergr. Space Technol. 2009, 24, 423–435. [Google Scholar] [CrossRef]
- Huo, J.; Sun, X.; Li, G.; Li, T.; Sun, W. Multi-degree-of-freedom coupling dynamic characteristic of TBM disc cutter under shock excitation. J. Cent. South. Univ. 2015, 22, 3326–3337. [Google Scholar] [CrossRef]
- Huo, J.; Wu, H.; Sun, W.; Zhang, Z.; Wang, L.; Dong, J. Electromechanical coupling dynamics of TBM main drive system. Nonlinear Dyn. 2017, 4, 2687–2710. [Google Scholar] [CrossRef]
- Huo, J.; Hou, N.; Sun, W.; Wang, L.; Dong, J. Analyses of dynamic characteristics and structure optimization of tunnel boring machine cutter system with multi-joint surface. Nonlinear Dyn. 2017, 1, 237–254. [Google Scholar] [CrossRef]
- Huo, J.; Zhang, Z.; Meng, Z.; Li, J.; Wu, H.; Jia, L. Dynamic analysis and experimental study of a Tunnel boring Machine testbed under multiple conditions. Eng. Fail. Anal. 2021, 127, 105557. [Google Scholar] [CrossRef]
- Liao, J.; Zhu, X.; Yao, B. Dynamic modeling of gripper type hard rock tunnel boring machine. Tunn. Undergr. Space Technol. 2018, 71, 166–179. [Google Scholar] [CrossRef]
- Sun, H.; Gao, Y. Dynamic Cutting Force Model and Vibration Analysis of the Cutterhead in TBM. Rock Mech. Rock Eng. 2023, 56, 7883–7903. [Google Scholar] [CrossRef]
- Xu, H.; Gong, Q.; Zhou, X.; Yang, F.; Han, B. Vibration analysis of rock breaking by TBM rolling cutter assisted with various depth kerfs. Tunn. Undergr. Space Technol. 2024, 146, 105634. [Google Scholar] [CrossRef]
- Cho, J.; Jeon, S.; Jeong, H.; Chang, S. Evaluation of cutting efficiency during TBM disc cutter excavation within a Korean granitic rock using linear-cutting-machine testing and photogrammetric measurement. Tunn. Undergr. Space Technol. 2013, 35, 37–54. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, C. Experimental and simulation study on rock-breaking efficiency of disc cutters on composite rocks. Int. J. Rock Mech. Min. Sci. 2022, 153, 105089. [Google Scholar] [CrossRef]
- Gertsch, R.; Gertsch, L.; Rostami, J. Disc cutting tests in Colorado Red Granite: Implications for TBM performance prediction. Int. J. Rock Mech. Min. Sci. 2007, 44, 238–246. [Google Scholar] [CrossRef]
- Tumac, D.; Balci, C. Investigations into the cutting characteristics of CCS type disc cutters and the comparison between experimental, theoretical and empirical force estimations. Tunn. Undergr. Space Technol. 2015, 45, 84–98. [Google Scholar] [CrossRef]
- Pan, Y.; Liu, Q.; Liu, J.; Peng, X.; Kong, X. Full-scale linear cutting tests in Chongqing sandstone to study the influence of confining stress on rock cutting forces by TBM disc cutter. Rock Mech. Rock Eng. 2018, 51, 1697–1713. [Google Scholar] [CrossRef]
- Xia, Y.; Guo, B.; Tan, Q.; Zhang, X.; Lan, H.; Ji, Z. Comparisons between experimental and semi-theoretical cutting forces of CCS disc cutters. Rock Mech. Rock Eng. 2018, 51, 1583–1597. [Google Scholar] [CrossRef]
- Dehkhoda, S.; Detournay, E. Rock cutting experiments with an actuated disc. Rock Mech. Rock Eng. 2019, 52, 3443–3458. [Google Scholar] [CrossRef]
- Thyagarajan, M.; Rostami, J. Study of cutting forces acting on a disc cutter and impact of variable penetration measured by full scale linear cutting tests. Int. J. Rock Mech. Min. Sci. 2024, 175, 105675. [Google Scholar] [CrossRef]
- Geng, Q.; Wei, Z.; Meng, H.; Macias, F.; Bruland, A. Free-face-assisted rock breaking method based on the multi-stage tunnel boring machine (TBM) cutterhead. Rock Mech. Rock Eng. 2016, 49, 4459–4472. [Google Scholar] [CrossRef]
- Gong, Q.; Du, X.; Li, Z.; Wang, Q. Development of a mechanical rock breakage experimental platform. Tunn. Undergr. Space Technol. 2016, 57, 129–136. [Google Scholar] [CrossRef]
- Pan, Y.; Liu, Q.; Peng, X.; Kong, X.; Liu, J.; Zhang, X. Full-Scale rotary cutting test to study the influence of disc cutter installment radius on rock cutting forces. Rock Mech. Rock Eng. 2018, 51, 2223–2236. [Google Scholar] [CrossRef]
- Deng, L.; Zhang, F.; Li, X.; Zhang, C.; Ji, Y.; Wu, Y. Experimental and Numerical Investigations on Rock Breaking of TBM Disc Cutter Based on a Novel Platform with Rotational Cutting. Rock Mech. Rock Eng. 2023, 56, 1415–1436. [Google Scholar] [CrossRef]
- Liu, H.; Kou, S.; Lindqvist, P.; Tang, C. Numerical simulation of the rock fragmentation process induced by indenters. Int. J. Rock Mech. Min. Sci. 2022, 39, 491–505. [Google Scholar] [CrossRef]
- Zhai, S.; Zhou, X.; Bi, J.; Qian, Q. Validation of GPD to Model Rock Fragmentation by TBM Cutters. Int. J. Geomech. 2017, 17, 06016036. [Google Scholar] [CrossRef]
- Xiao, N.; Zhou, X.; Gong, Q. The modelling of rock breakage process by TBM rolling cutters using 3D FEM-SPH coupled method. Tunn. Undergr. Space Technol. 2017, 61, 90–103. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, P.; Fan, L.; Liu, Q. Numerical study of the effect of confining pressure on the rock breakage efficiency and fragment size distribution of a TBM cutter using a coupled FEM-DEM method. Tunn. Undergr. Space Technol. 2019, 88, 260–275. [Google Scholar] [CrossRef]
- Cheng, J.; Jiang, Z.; Han, W.; Li, M.; Wang, Y. Breakage mechanism of hard-rock penetration by TBM disc cutter after high pressure water jet precutting. Eng. Fract. Mech. 2020, 240, 107320. [Google Scholar] [CrossRef]
- Fang, Y.; Yao, Z.; Xu, W.; Tian, Q.; He, C.; Liu, S. The performance of TBM disc cutter in soft strata: A numerical simulation using the three-dimensional RBD-DEM coupled method. Eng. Fail. Anal. 2021, 119, 104996. [Google Scholar] [CrossRef]
- Afrasiabi, N.; Rafiee, R.; Noroozi, M. Investigating the effect of discontinuity geometrical parameters on the TMB performance in hard rock. Tunn. Undergr. Space Technol. 2019, 84, 326–333. [Google Scholar] [CrossRef]
- Li, T.; Zhang, Z.; Jia, C.; Liu, B.; Liu, Y.; Jiang, Y. Investigating the cutting force of disc cutter in multi-cutter rotary cutting of sandstone: Simulations and experiments. Int. J. Rock Mech. Min. Sci. 2022, 152, 105069. [Google Scholar] [CrossRef]
- Yu, Q.; He, X.; Miao, H.; Lin, M.; Zhang, X.; Guo, R. Numerical simulation of rock breaking by TBM disc cutter in soil-rock composite formations. Bull. Eng. Geol. Environ. 2022, 81, 514. [Google Scholar] [CrossRef]
- Shang, X.; Zhou, J.; Liu, F.; Shen, J.; Liao, X. A peridynamics study for the free-surface-assisted rock fragmentation caused by TBM disc cutters. Comput. Geotech. 2023, 158, 105380. [Google Scholar] [CrossRef]
- Yang, Z.; Pan, D.; Zhou, J.; Chen, J.; Sun, Z.; Liu, H. Vibration characteristics of cutter-head in soft-hard mixed stratum: An experimental case study on su’ai tunnel. KSCE J. Civ. Eng. 2020, 24, 1338–1347. [Google Scholar] [CrossRef]
- Ling, J.; Sun, W.; Yang, X.; Tong, X.; Zhang, N. Vibration response and parameter influence of TBM cutterhead system under extreme conditions. J. Mech. Sci. Technol. 2018, 32, 4959–4969. [Google Scholar] [CrossRef]
- Huang, X.; Liu, Q.; Liu, H.; Zhang, P.; Pan, S.; Zhang, X.; Fang, J. Development and in-situ application of a real-time monitoring system for the interaction between TBM and surrounding rock. Tunn. Undergr. Space Technol. 2018, 81, 187–208. [Google Scholar] [CrossRef]
- Wu, F.; Gong, Q.; Li, Z.; Qiu, H.; Jin, C.; Huang, L.; Yin, L. Development and application of cutterhead vibration monitoring system for TBM tunneling. Int. J. Rock Mech. Min. Sci. 2021, 146, 104887. [Google Scholar] [CrossRef]
- Liu, D.; Xiao, Y.; Zhou, X.; Gong, Q.; Liu, J. Study on Vibration Characterization Parameters of TBM Rock-breaking Cutterhead. Mod. Tunn. Technol. 2023, 60, 153–162. (In Chinese) [Google Scholar]
- Walter, B. Detecting Changing Geologic Conditions with Tunnel Boring Machines by Using Passive Vibration Measurements. Ph.D. Thesis, Colorado School of Mines, Golden, CO, USA, 2013. [Google Scholar]
- Buckley, J. Monitoring the Vibration Response of a Tunnel Boring Machine: Application to Real Time Boulder Detection. MSc Thesis, Colorado School of Mines, Golden, CO, USA, 2014. [Google Scholar]
- Xin, S.; Zhou, Y.; Zhang, M.; Li, L. Research and development of shield-/TBM dedicated vibration monitoring sensor VM-BOX. Tunn. Constr. 2018, 213, 197–202. (In Chinese) [Google Scholar]
- Liu, M.; Liao, S.; Men, Y.; Xing, H.; Liu, H.; Sun, L. Field Monitoring of TBM Vibration During Excavating Changing Stratum: Patterns and Ground Identification. Rock Mech. Rock Eng. 2022, 55, 1481–1498. [Google Scholar] [CrossRef]
- Fang, Y.; Li, X.; Liu, H.; Hao, S.; Yi, Y.; Guo, Y.; Li, H. Intelligent real-time identification technology of stratum characteristics during slurry TBM tunneling. Tunn. Undergr. Space Technol. 2023, 139, 105216. [Google Scholar] [CrossRef]
- Shen, S.; Yan, T.; Zhou, A. Estimating locations of soil–rock interfaces based on vibration data during shield tunneling. Autom. Constr. 2023, 150, 104813. [Google Scholar] [CrossRef]
- Lu, Z.; Wang, X.; Zhou, G.; Feng, L. Investigation on Vibration Influence Law of Double-Shield TBM Tunnel Construction. Appl. Sci. 2022, 12, 7727. [Google Scholar] [CrossRef]
- Wu, K.; Zheng, Y.; Li, S.; Sun, J.; Han, Y.; Hap, D. Vibration response law of existing buildings affected by subway tunnel boring machine excavation. Tunn. Undergr. Space Technol. 2022, 120, 104318. [Google Scholar] [CrossRef]
- Wang, Z.; Jiang, Y.; Shao, X.; Liu, C. On-site measurement and environmental impact of vibration caused by construction of double-shield TBM tunnel in urban subway. Sci. Rep. 2023, 13, 17689. [Google Scholar] [CrossRef]
- Yang, Y.; Du, L.; Li, Q.; Zhao, X.; Ni, Z. Vibration prediction and analysis of the main beam of the TBM based on a multiple linear regression model. Sci. Rep. 2024, 14, 3498. [Google Scholar] [CrossRef] [PubMed]
- Tao, H.; Wang, P.; Chen, Y.; Stojanovic, V.; Yang, H. An unsupervised fault diagnosis method for rolling bearing using STFT and generative neural networks. J. Frankl. Inst. 2020, 357, 7286–7307. [Google Scholar] [CrossRef]
- Kong, Y.; Wang, T.; Chu, F. Meshing frequency modulation assisted empirical wavelet transform for fault diagnosis of wind turbine planetary ring gear. Renew. Energy 2019, 132, 1373–1388. [Google Scholar] [CrossRef]
- Kirikera, G.; Shinde, V.; Schulz, M.; Ghoshal, A.; Sundaresan, M.; Allemang, R.; Lee, J. A structural neural system for real-time health monitoring of composite materials. Struct. Health Monit. 2008, 7, 65–83. [Google Scholar] [CrossRef]
- Randall, R. Vibration-based condition monitoring: Industrial, aerospace and automotive applications. Mech. Mach. Sci. 2010, 3, 431–477. [Google Scholar]
- Huang, N.; Long, S.; Wu, M.; Shih, H.; Zheng, Q.; Yen, N.; Tung, C.; Liu, H.; Shen, Z. The empirical mode decomposition and the hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Ville, J. Theorie et application dela notion de signal analytique. Cables Et Transm. 1948, 2, 61–74. [Google Scholar]
- Huang, N.; Shen, Z.; Long, S. A New View of Nonlinear Water Waves: The Hilbert Spectrum1. Annu. Rev. Fluid Mech. 2003, 31, 417–457. [Google Scholar] [CrossRef]
- Smith, J. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef]
- Mark, G.; Frei, I. Intrinsic Time-Scale Decomposition: Time-Frequency-Energy Analysis and Real-Time Filtering of Non-Stationary Signals. Proc. Math. Phys. Eng. Sci. 2007, 463, 321–342. [Google Scholar]
- Li, J.; Jing, L.; Zheng, X.; Li, P.; Yang, C. Application and outlook of information and intelligence technology for safe and efficient TBM construction. Tunn. Undergr. Space Technol. 2019, 93, 103097. [Google Scholar] [CrossRef]
- Han, Y. State detects and fault diagnosis technology of TBM. Constr. Mach. 2003, 9, 30–34. (In Chinese) [Google Scholar]
- Zhao, H.; Su, D.; Qiao, W. The status monitoring and failure diagnosis of TBM main gearbox. Constr. Mach. 2003, 6, 44–46. (In Chinese) [Google Scholar]
- Ling, J.; Tong, X.; Guo, C.; Li, Z. Natural frequency sensitivity and influence analysis of TBM cutterhead system. J. Vibroeng. 2019, 21, 1710–1723. [Google Scholar] [CrossRef]
- Zou, X.; Mi, Y.; Zheng, H.; Tao, J. Influence of vibration on the performance of tunnel boring machines. In Proceedings of the 2016 12th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), Auckland, New Zealand, 29–31 August 2016. [Google Scholar]
- Zhu, Y.; Wang, X.; Chen, X. Evaluation of TBM Cutterhead’s Comprehensive Performance Under Complicated Conditions. J. Beijing Inst. Technol. 2020, 29, 326–338. [Google Scholar]
- Sun, W.; Zhu, Y.; Wang, W.; Zhu, D. Evaluation of TBM cutterhead vibration under complicated condition. In Proceedings of the 2016 12th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), Auckland, New Zealand, 29–31 August 2016. [Google Scholar]
- Shao, H.; Jiang, H. A novel method for intelligent fault diagnosis of rolling bearings using ensemble deep auto-encoders. Mech. Syst. Signal Process. 2018, 102, 278–297. [Google Scholar] [CrossRef]
- Lu, C.; Chen, J.; Hong, R.; Feng, Y.; Li, Y. Degradation trend estimation of slewing bearing based on LSSVM model. Mech. Syst. Signal Process. 2016, 76–77, 353–366. [Google Scholar] [CrossRef]
- Pan, Y.; Hong, R.; Chen, J.; Qin, Z.; Feng, Y. Incipient fault detection of wind turbine large-size slewing bearing based on circular domain. Measurement 2019, 137, 130–142. [Google Scholar] [CrossRef]
- Bao, W.; Wang, H.; Chen, J.; Zhang, B.; Ding, P.; Wu, J.; He, P. Life prediction of slewing bearing based on isometric mapping and fuzzy support vector regression. Trans. Inst. Meas. 2019, 42, 94–103. [Google Scholar] [CrossRef]
- Zhang, C.; Meng, X.; Li, D.; Wu, C.; Sun, H. Design and Study of Online Automatic Monitoring System for Shield Vibration. Tunn. Constr. 2018, 38, 321–328. [Google Scholar]
- Fang, Y.; Li, X.; Guo, Y.; Jin, D.; Liu, H. Effects of Driving Parameters on TBM Dynamic Response and Cracking of the Disc Cutter Ring: A Case Study. Rock Mech. Rock Eng. 2024. [Google Scholar] [CrossRef]
- Fang, Y.; Li, X.; Hao, S.; Liu, H.; Yang, Y.; Guo, Y. Failure analysis of slurry TBM discharge pipe in complex strata combined with wear and vibration characteristics. Eng. Fail. Anal. 2023, 150, 107307. [Google Scholar] [CrossRef]
- Mooney, M.; Walter, B.; Steele, J.; Cano, D. Influence of geological conditions on measured TBM vibration frequency. In North American Tunneling; Davidson, G., Howard, A., Jacobs, L., Pintabona, R., Zernich, B., Eds.; North American Tunneling 2014 Proceedings; Society for Mining, Metallurgy & Exploration: Englewood, CO, USA, 2014; pp. 32–41. [Google Scholar]
- Ates, U.; Copur, H.; Mamaghani, A.; Avunduk, E.; Binen, I. Investigation of vibration patterns occurred during TBM excavation and rock cutting tests. In Proceedings of the ISRM 2019 Rock Dynamics Summit, Okinawa, Japan, 7–11 May 2019; pp. 704–709. [Google Scholar]
- Ates, U.; Copur, H. Investigation of parameters affecting vibration patterns generated during excavation by EPB TBMs. Tunn. Undergr. Space Technol. 2023, 138, 105185. [Google Scholar] [CrossRef]
- Vogiatzis, K.; Zafiropoulou, V.; Mouzakis, H. Monitoring and assessing the effects from Metro networks construction on the urban acoustic environment: The Athens Metro Line 3 Extension. Sci. Total Environ. 2018, 639, 1360–1380. [Google Scholar] [CrossRef] [PubMed]
- Ocak, I. Environmental effects of tunnel excavation in soft and shallow ground with EPBM: The case of Istanbul. Environ. Earth Sci. 2009, 59, 347–352. [Google Scholar] [CrossRef]
- Ding, L.; Wu, X.; Zhang, L.; Skibniewski, M. How to protect historical buildings against tunnel-induced damage: A case study in China. J. Cult. Herit. 2015, 16, 904–911. [Google Scholar] [CrossRef]
- Sengupta, A.; Banerjee, R.; Bandyopadhyay, S. Estimation of ground vibration and settlement during underground tunneling in Kolkata, India. Arab. J. Geosci. 2021, 14, 39. [Google Scholar] [CrossRef]
- Guo, F.; Tao, L.; Kong, H.; Ma, H.; Zhang, L.; Zhang, X. Analysis of vibration propagation and attenuation characteristics of shield tunnel construction in Lanzhou sandy gravel stratum. Rock Soil. Mech. 2018, 39, 3377–3384. (In Chinese) [Google Scholar]
- Zhu, J.; Deng, Z.; Yuan, F.; Yuan, Z.; Wang, Z. Investigations on main influencing factors on vibrations of tunnel boring machine in composite ground. J. Zhejiang Univ. Technol. 2022, 50, 436–443. (In Chinese) [Google Scholar]
- Namli, M.; Aras, F. Investigation of effects of dynamic loads in metro tunnels during construction and operation on existing buildings. Arab. J. Geosci. 2020, 13, 424. [Google Scholar] [CrossRef]
- Grund, M.; Ritter, J.; Gehrig, M. Ground Motion Relations While TBM Drilling in Unconsolidated Sediments. Rock Mech. Rock Eng. 2016, 49, 1773–1787. [Google Scholar] [CrossRef]
- Morgese, M.; Domaneschi, M.; Ansari, F.; Cimellaro, G.; Inaudi, D. Improving Distributed Fiber-Optic Sensor Measures by Digital Image Correlation: Two-Stage Structural Health Monitoring. ACI Struct. J. 2021, 118, 91–102. [Google Scholar]
- Domaneschi, M.; Niccolini, G.; Lacidogna, G.; Cimellaro, G. Nondestructive monitoring techniques for crack detection and localization in RC elements. Appl. Sci. 2020, 10, 3248. [Google Scholar] [CrossRef]
- Mitoulis, S.; Domaneschi, M.; Cimellaro, G.; Casas, J. Bridge and transport network resilience—A perspective. Proc. Inst. Civ. Eng.-Bridge Eng. 2022, 175, 138–149. [Google Scholar] [CrossRef]
- Mitoulis, S.; Domaneschi, M.; Casas, J.; Cimellaro, G.; Catbas, N.; Stojadinovic, B.; Frangopol, D. Editorial: The crux of bridge and transport network resilience—Advancements and future-proof solutions. Proc. Inst. Civ. Eng.-Bridge Eng. 2022, 175, 133–137. [Google Scholar] [CrossRef]
- Pellecchia, C.; Cardoni, A.; Cimellaro, G.; Domaneschi, M.; Ansari, F.; Khalil, A. Progressive Collapse Analysis of the Champlain Towers South in Surfside, Florida. J. Struct. Eng. 2023, 150, 1. [Google Scholar] [CrossRef]
- Domaneschi, M.; Cucuzza, R.; Martinelli, L.; Noori, M.; Marano, G. A probabilistic framework for the resilience assessment of transport infrastructure systems via structural health monitoring and control based on a cost function approach. Struct. Infrastruct. Eng. 2024, 1–13. [Google Scholar] [CrossRef]
- Cucuzza, R.; Aloisio, A.; Bari, R.; Domaneschi, M. Vulnerability assessment and lifecycle analysis of an existing masonry arch bridge. Eng. Struct. 2024, 302, 117422. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Fang, Z.; Wang, J.; Chen, D.; Zhang, Y.; Ba, X. Review on Vibration Monitoring and Its Application during Shield Tunnel Construction Period. Buildings 2024, 14, 1066. https://doi.org/10.3390/buildings14041066
Yang W, Fang Z, Wang J, Chen D, Zhang Y, Ba X. Review on Vibration Monitoring and Its Application during Shield Tunnel Construction Period. Buildings. 2024; 14(4):1066. https://doi.org/10.3390/buildings14041066
Chicago/Turabian StyleYang, Weimin, Zhongdong Fang, Jing Wang, Diyang Chen, Yanhuan Zhang, and Xingzhi Ba. 2024. "Review on Vibration Monitoring and Its Application during Shield Tunnel Construction Period" Buildings 14, no. 4: 1066. https://doi.org/10.3390/buildings14041066
APA StyleYang, W., Fang, Z., Wang, J., Chen, D., Zhang, Y., & Ba, X. (2024). Review on Vibration Monitoring and Its Application during Shield Tunnel Construction Period. Buildings, 14(4), 1066. https://doi.org/10.3390/buildings14041066