Author Contributions
Conceptualization, M.D.N.; Methodology, D.M. and M.D.N.; Software, S.A.T., D.M. and M.D.N.; Formal analysis, S.A.T.; Investigation, S.A.T. and D.M.; Writing—original draft, S.A.T. and D.M.; Writing—review & editing, M.D.N.; Supervision, M.D.N.; Project administration, M.D.N. All authors have read and agreed to the published version of the manuscript.
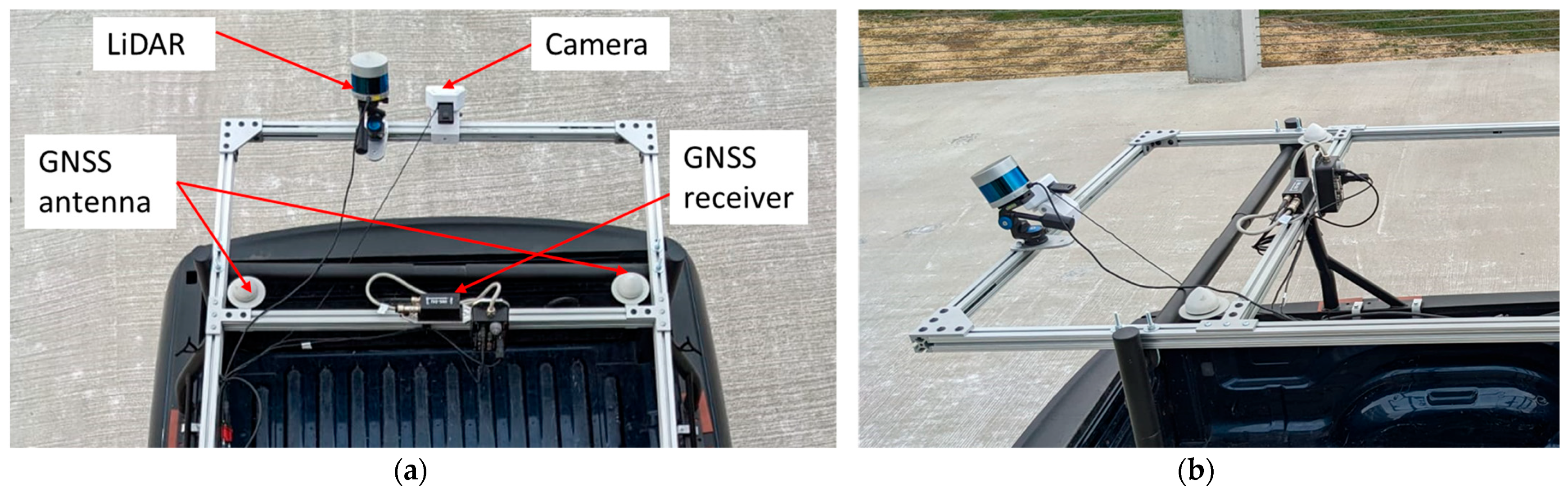
Figure 1.
The data collection system: (a) top view, (b) side view.
Figure 1.
The data collection system: (a) top view, (b) side view.
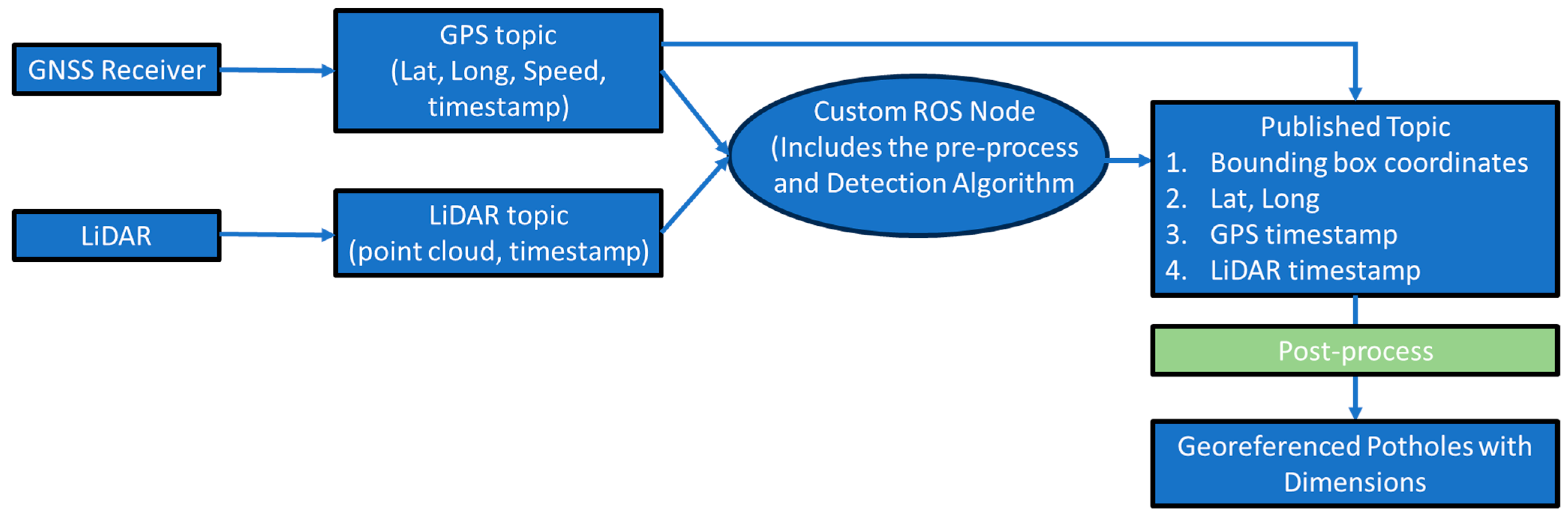
Figure 2.
Implementation of the proposed algorithm in ROS.
Figure 2.
Implementation of the proposed algorithm in ROS.
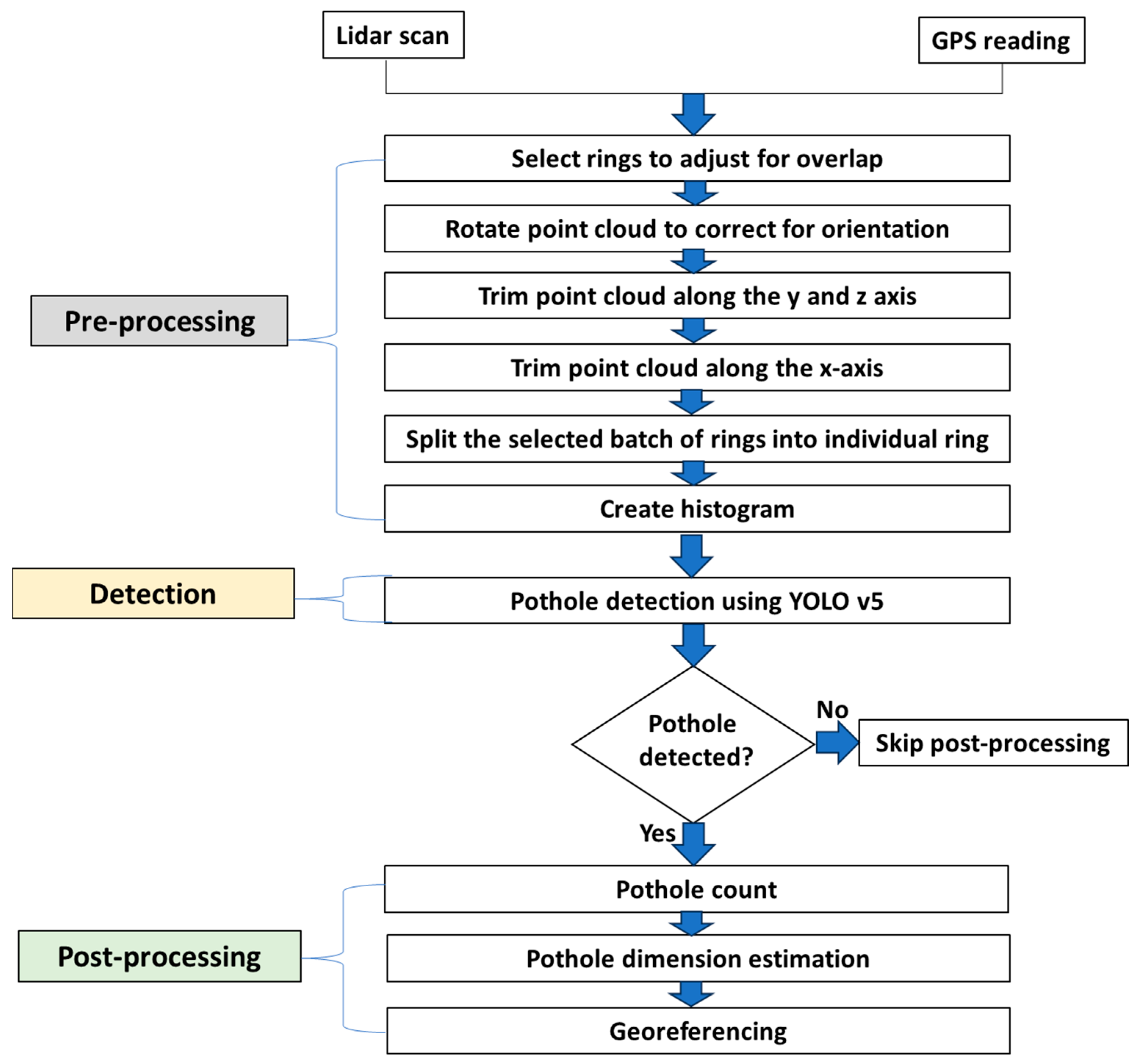
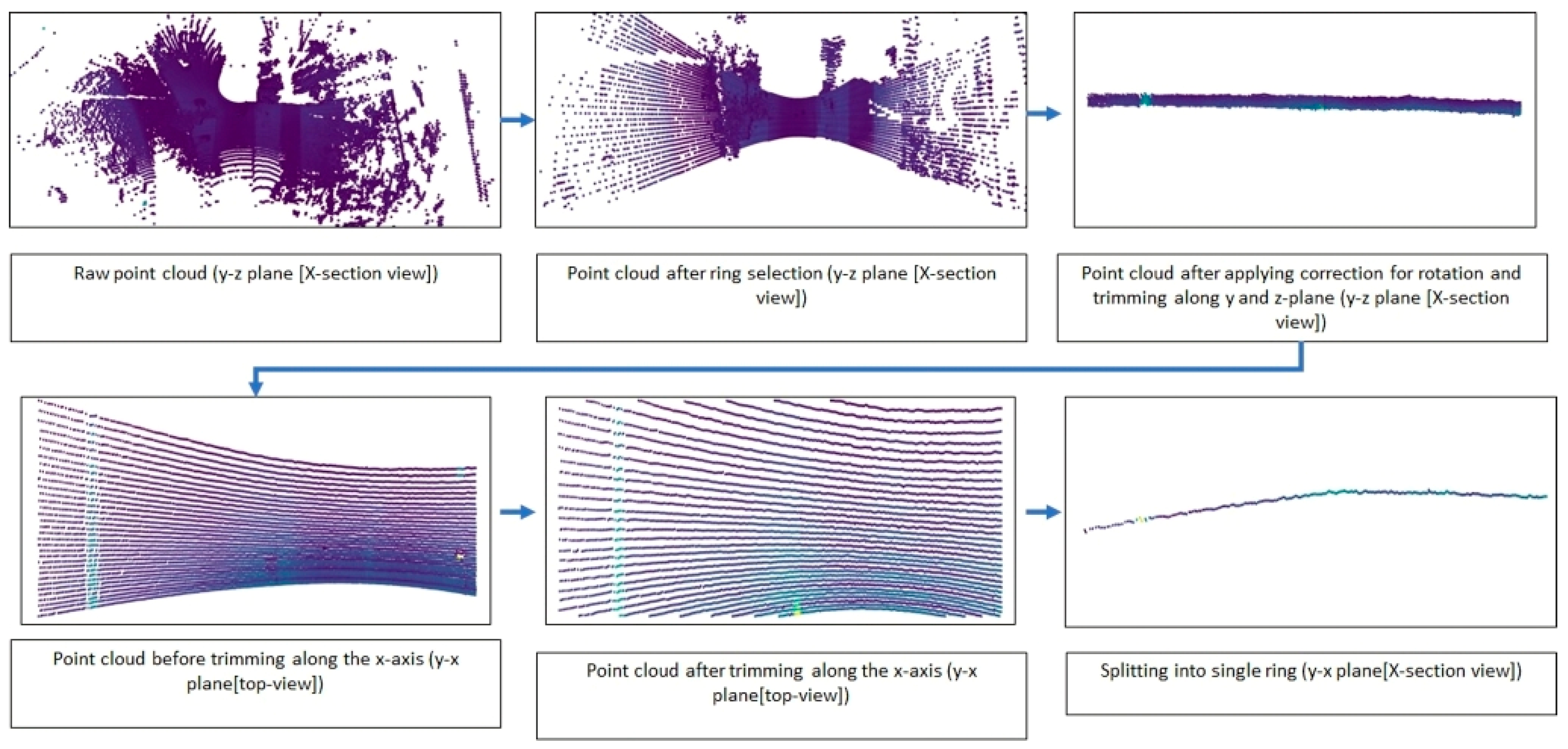
Figure 3.
Flowchart of the point cloud data processing.
Figure 3.
Flowchart of the point cloud data processing.
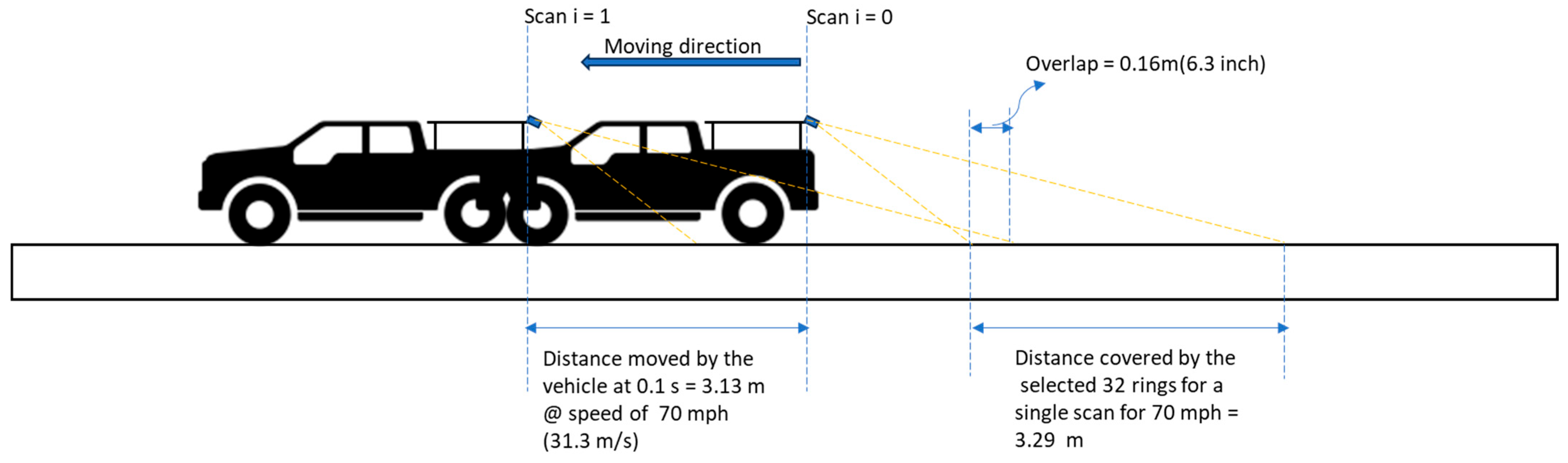
Figure 4.
Schematic diagram of the overlap between two subsequent LiDAR scans at a speed of 70 mph.
Figure 4.
Schematic diagram of the overlap between two subsequent LiDAR scans at a speed of 70 mph.
Figure 5.
Rotation and trimming of the point cloud.
Figure 5.
Rotation and trimming of the point cloud.
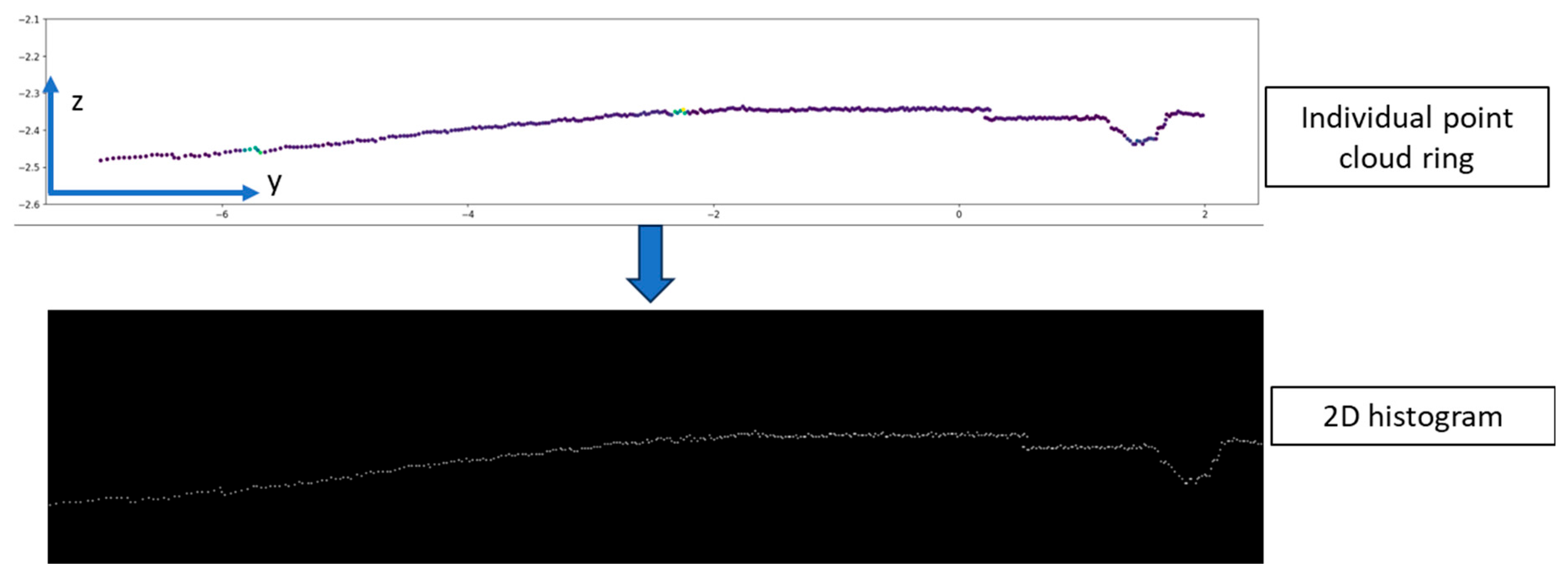
Figure 6.
Conversion of point cloud to 2D histogram.
Figure 6.
Conversion of point cloud to 2D histogram.
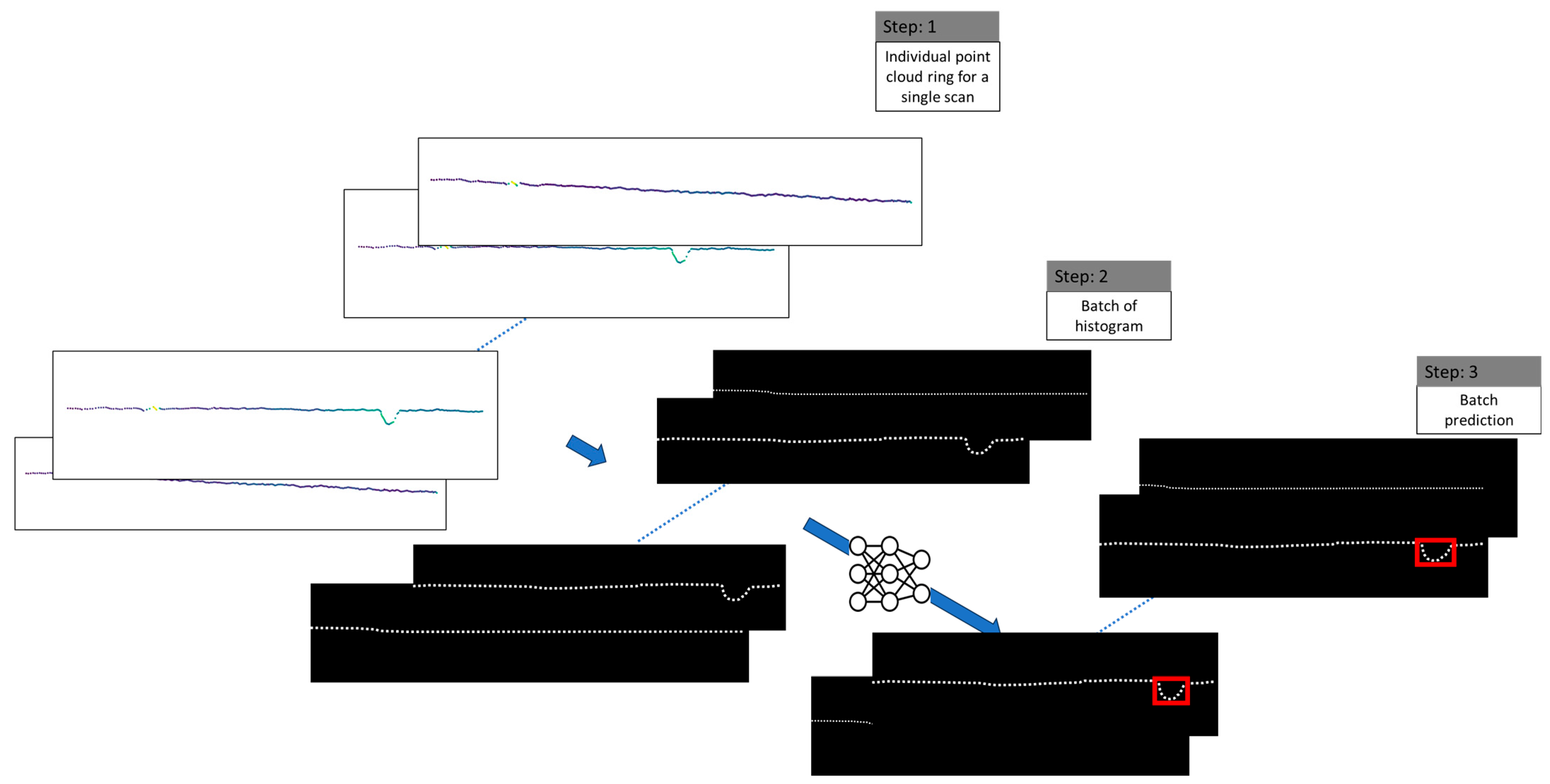
Figure 7.
Pothole detection from the 2D histograms.
Figure 7.
Pothole detection from the 2D histograms.
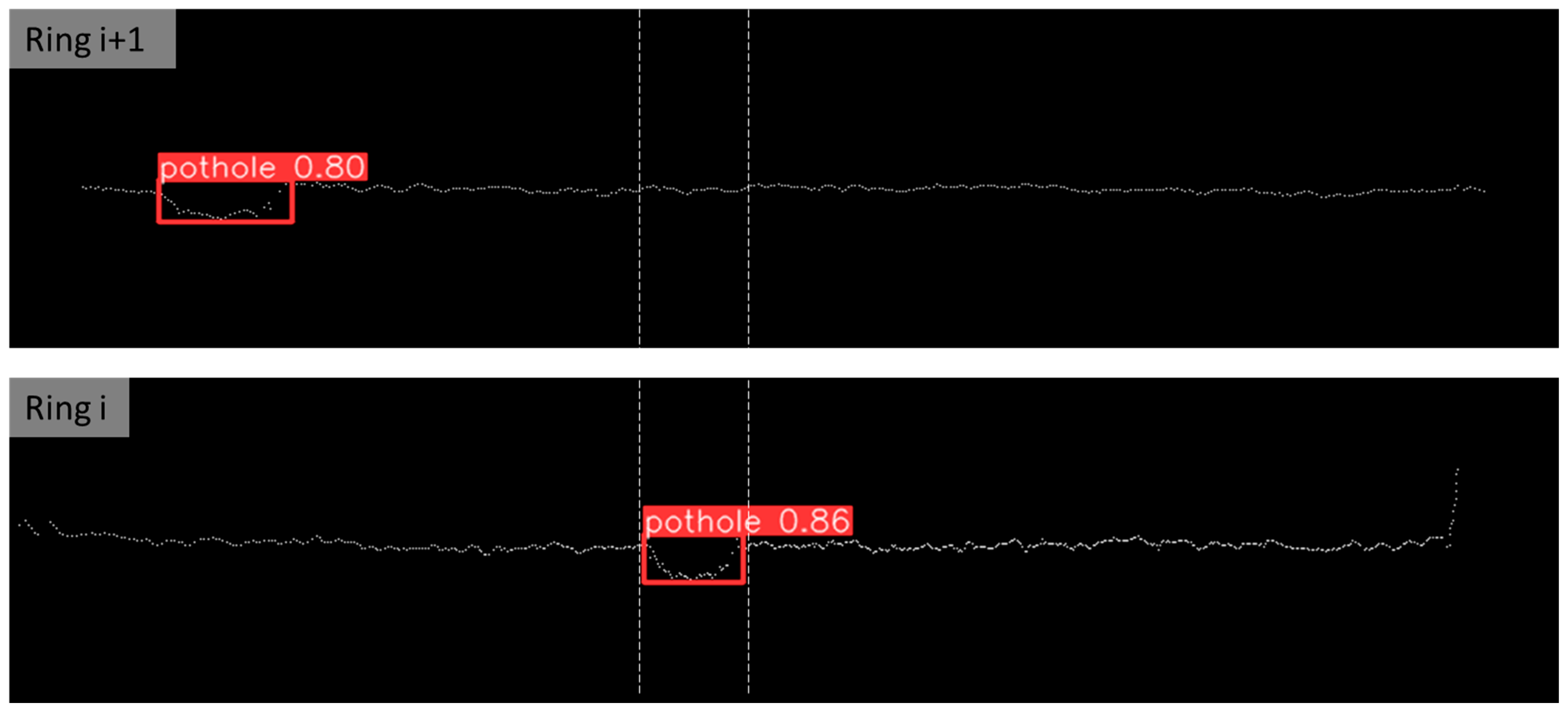
Figure 8.
Consecutive LiDAR rings corresponding to the same pothole (overlap).
Figure 8.
Consecutive LiDAR rings corresponding to the same pothole (overlap).
Figure 9.
Subsequent LiDAR rings corresponding to different potholes (non-overlap).
Figure 9.
Subsequent LiDAR rings corresponding to different potholes (non-overlap).
Figure 10.
Implementation of the pothole counting algorithm.
Figure 10.
Implementation of the pothole counting algorithm.
Figure 12.
Point-click procedure to obtain the actual dimension of the pothole.
Figure 12.
Point-click procedure to obtain the actual dimension of the pothole.
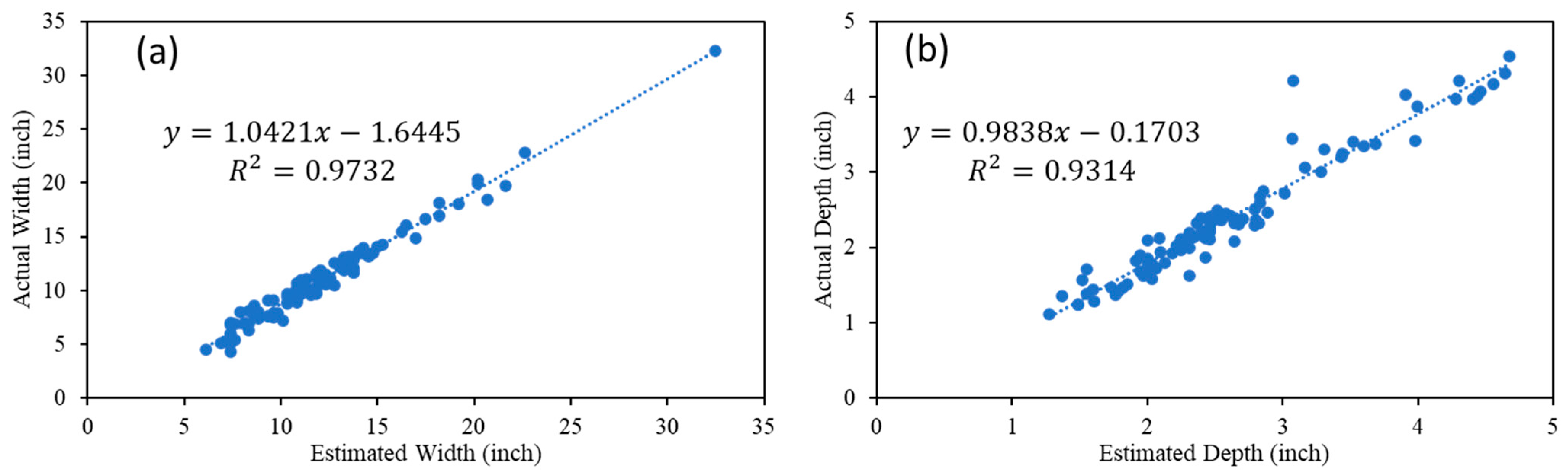
Figure 13.
(a) Correlation between actual and predicted width, and (b) correlation between actual and predicted depth.
Figure 13.
(a) Correlation between actual and predicted width, and (b) correlation between actual and predicted depth.
Figure 14.
Determination of length.
Figure 14.
Determination of length.
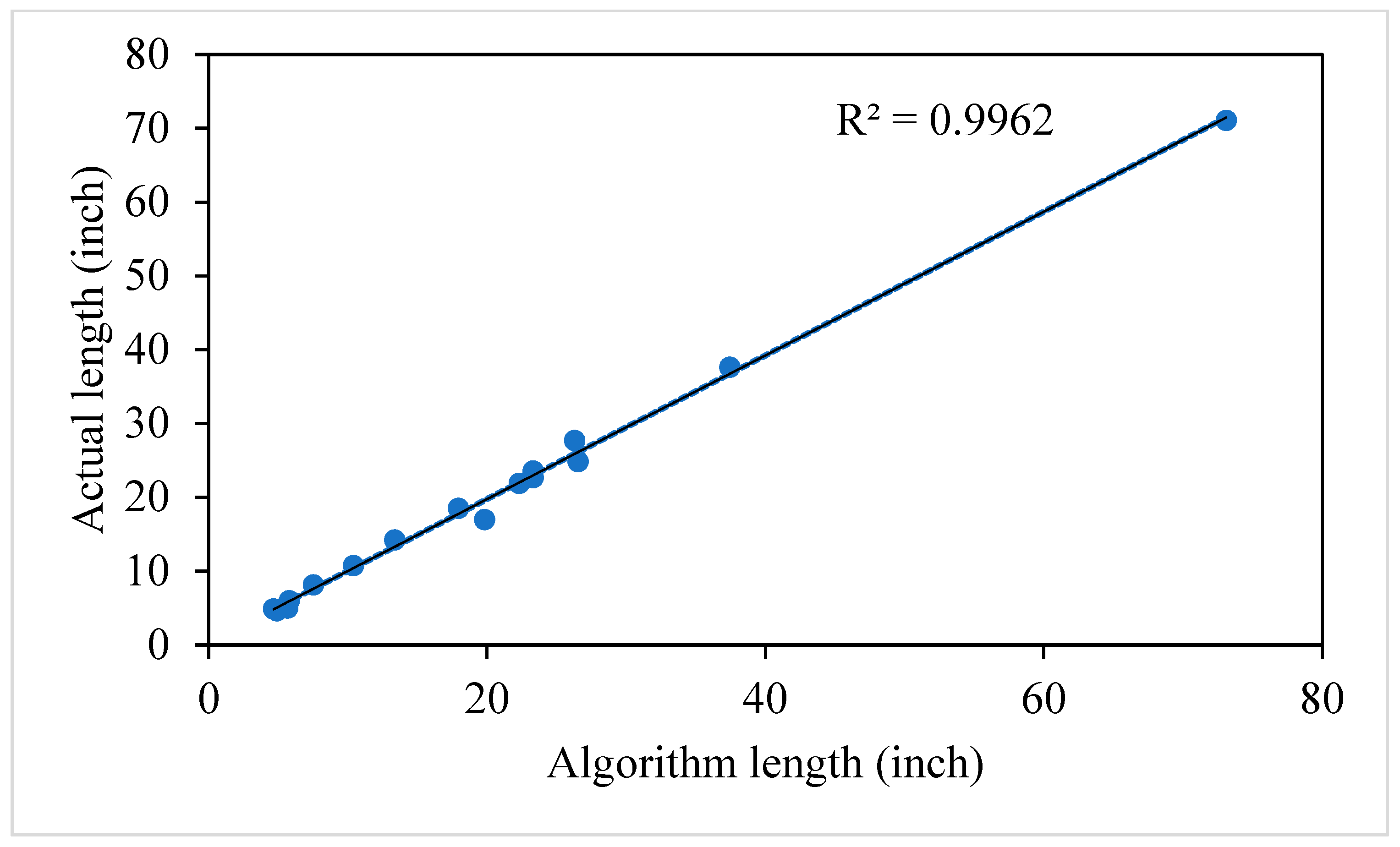
Figure 15.
Correlation between actual length and predicted length.
Figure 15.
Correlation between actual length and predicted length.
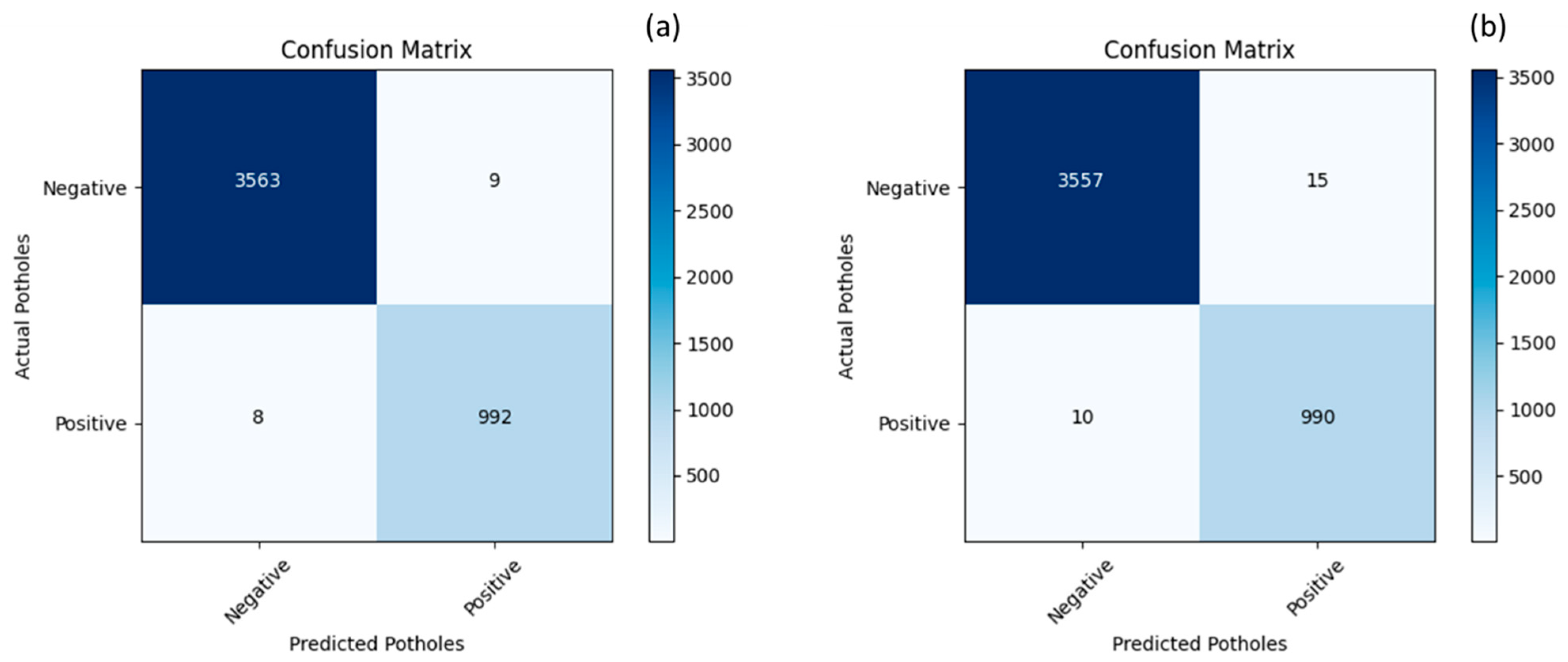
Figure 16.
Confusion matrix: (a) YOLO v5s, and (b) YOLO v5n.
Figure 16.
Confusion matrix: (a) YOLO v5s, and (b) YOLO v5n.
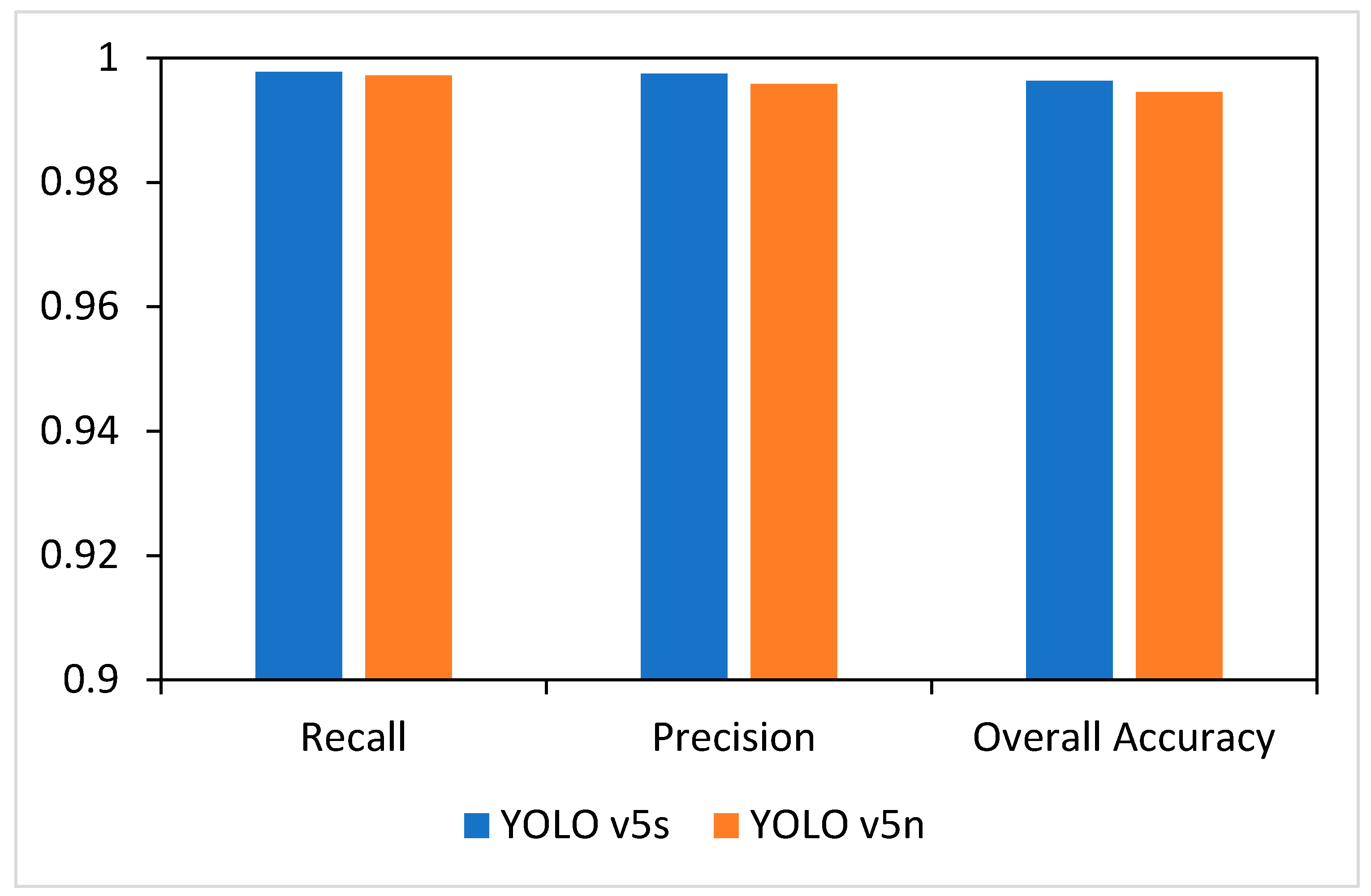
Figure 17.
Accuracy comparison between YOLO v5s and YOLO v5n.
Figure 17.
Accuracy comparison between YOLO v5s and YOLO v5n.
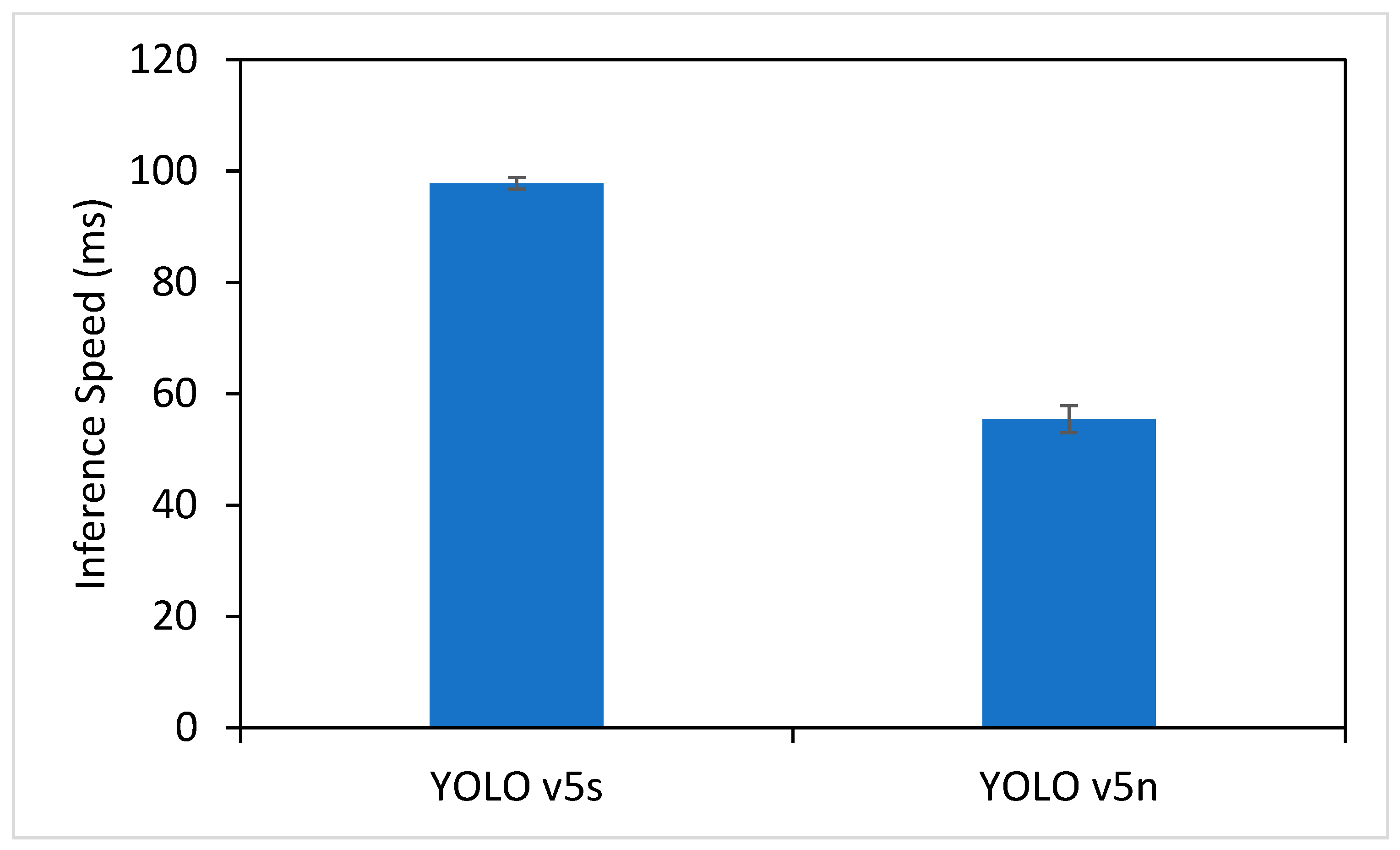
Figure 18.
Inference speed comparison between YOLO v5s and YOLO v5n.
Figure 18.
Inference speed comparison between YOLO v5s and YOLO v5n.
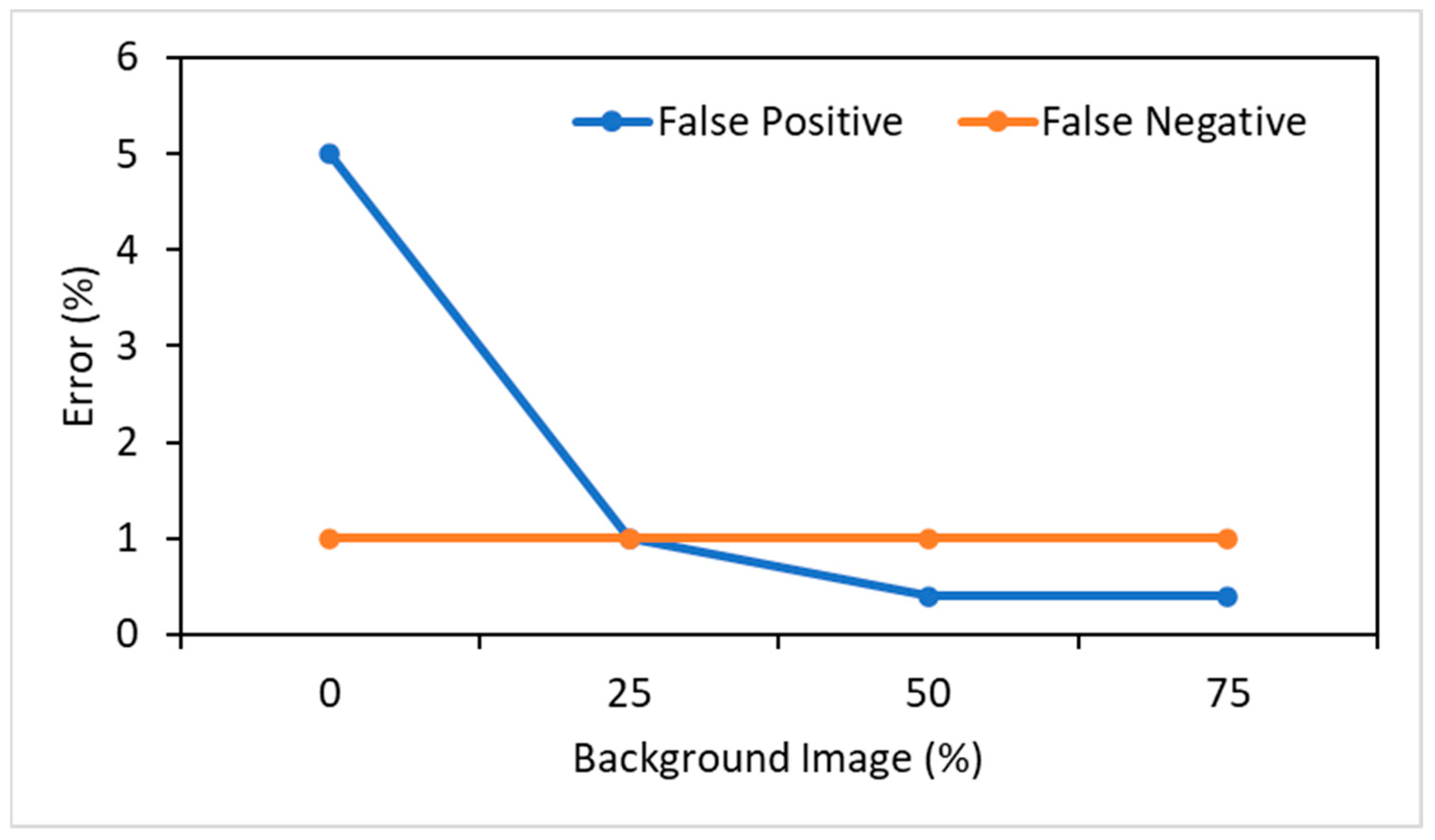
Figure 19.
Effect of background image percentage on false negative detection.
Figure 19.
Effect of background image percentage on false negative detection.
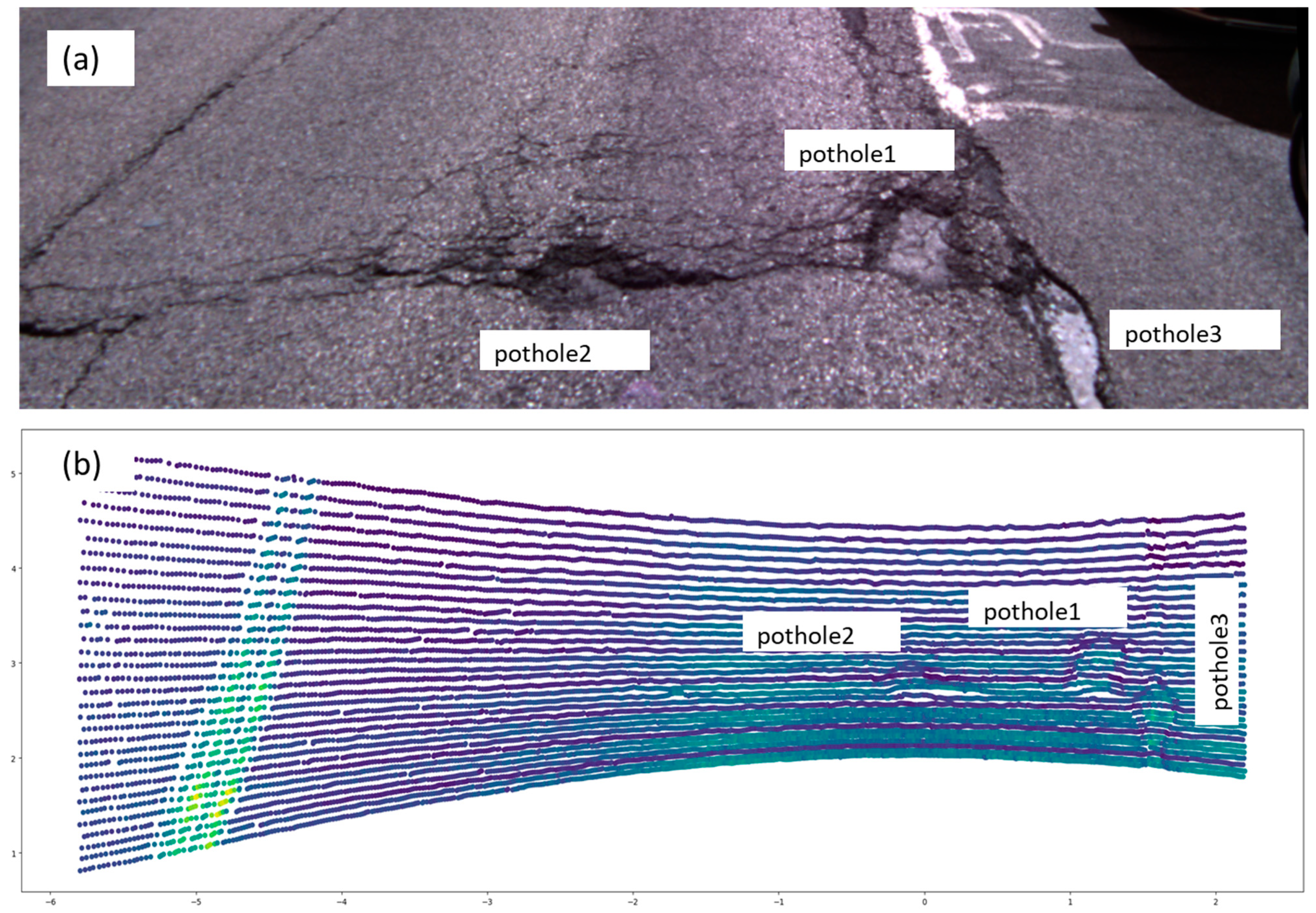
Figure 20.
Verification of the pothole count algorithm: (a) image of captured by camera (b) LiDAR scan corresponding to the image.
Figure 20.
Verification of the pothole count algorithm: (a) image of captured by camera (b) LiDAR scan corresponding to the image.
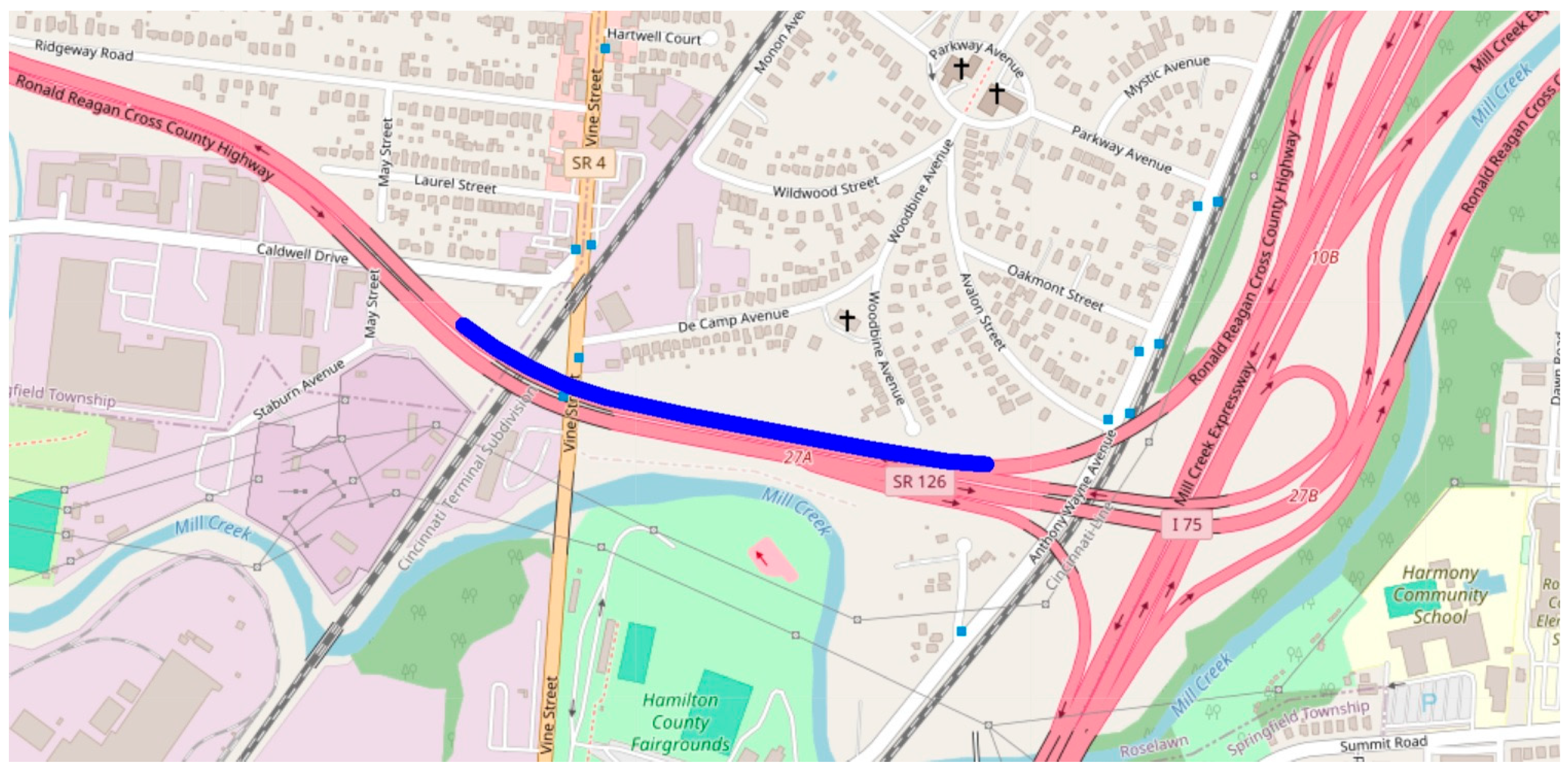
Figure 21.
(a) Location of the testing strip on State Route 126, and (b) detected potholes.
Figure 21.
(a) Location of the testing strip on State Route 126, and (b) detected potholes.
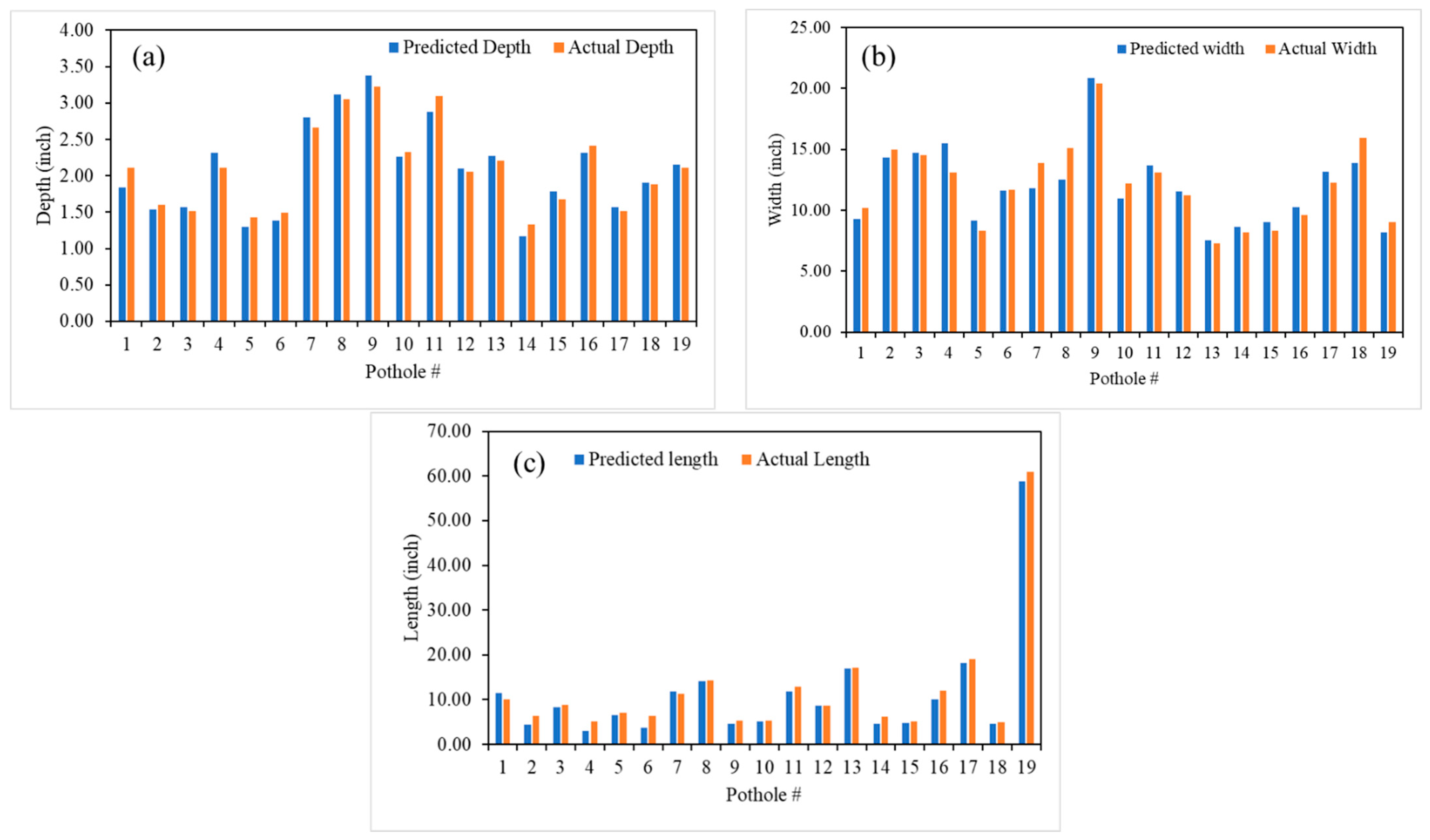
Figure 22.
Measured vs. predicted dimension: (a) depth, (b) width, and (c) length.
Figure 22.
Measured vs. predicted dimension: (a) depth, (b) width, and (c) length.
Figure 23.
Test strip (blue line) at Interstate 71 North.
Figure 23.
Test strip (blue line) at Interstate 71 North.
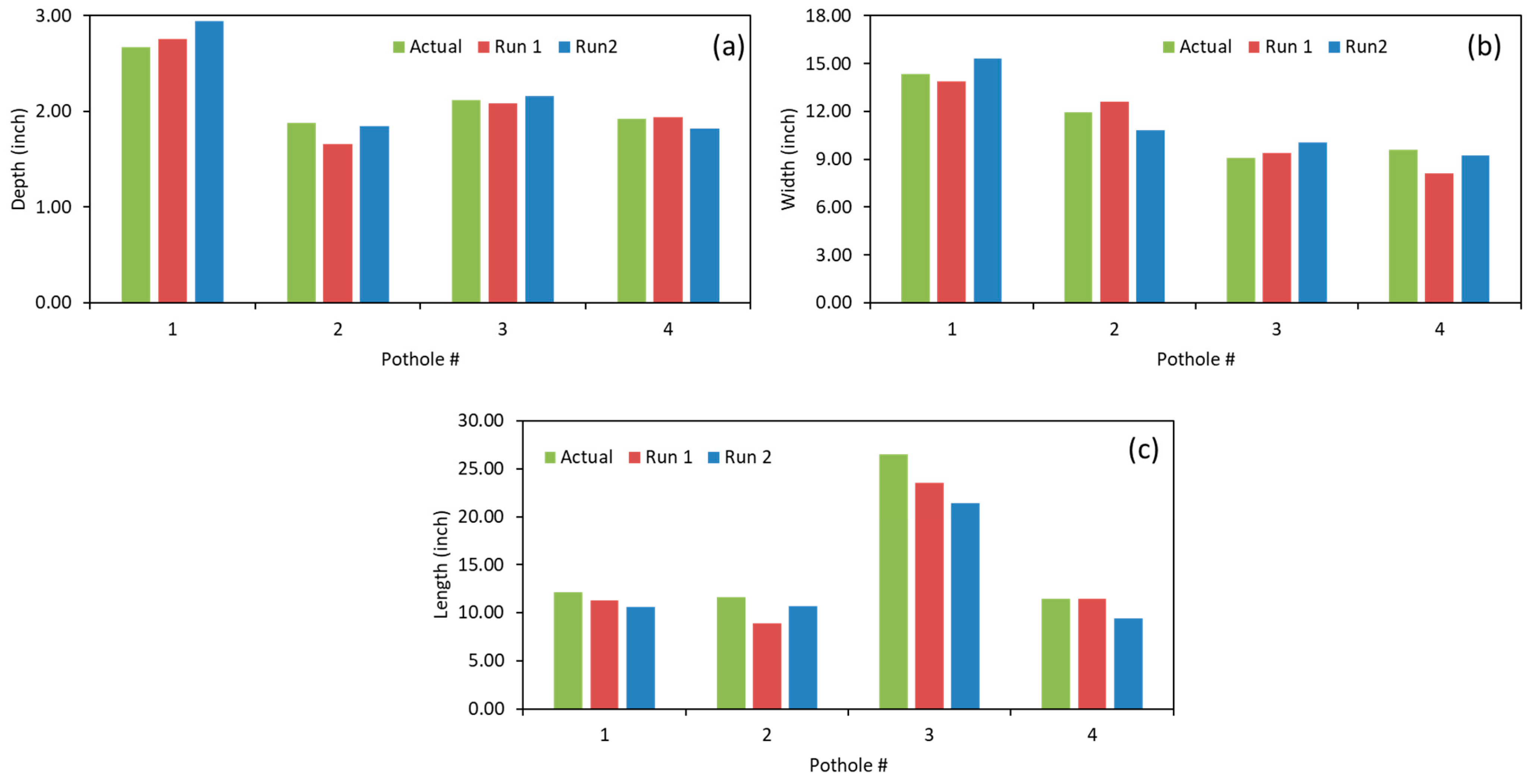
Figure 24.
Comparison between actual and predicted dimensions for Run 1 and Run 2 at 55 mph: (a) depth, (b) width, and (c) length.
Figure 24.
Comparison between actual and predicted dimensions for Run 1 and Run 2 at 55 mph: (a) depth, (b) width, and (c) length.
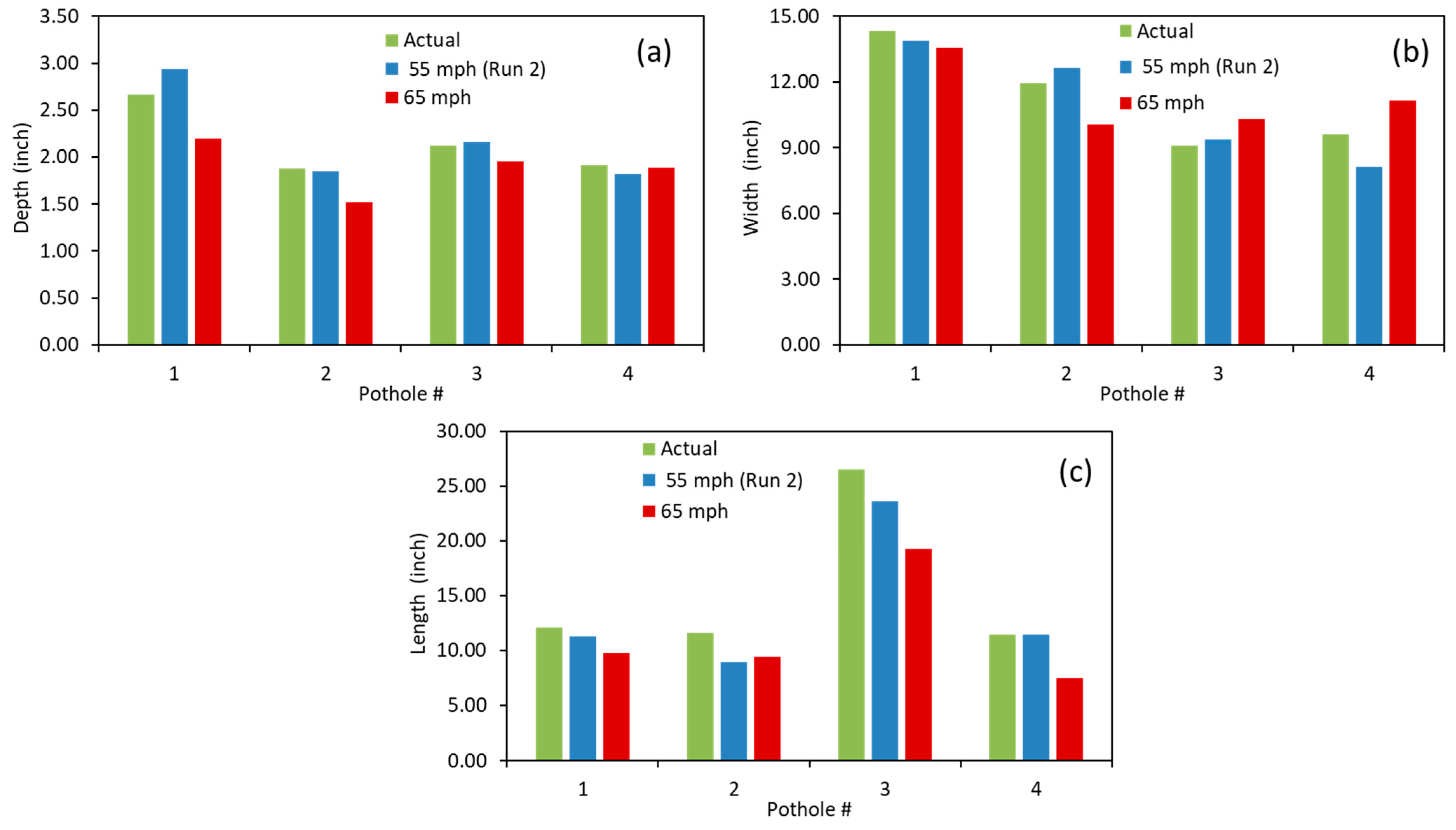
Figure 25.
Comparison between actual and predicted dimensions for Run 2 (55 mph) and run at 65 mph: (a) depth, (b) width, and (c) length.
Figure 25.
Comparison between actual and predicted dimensions for Run 2 (55 mph) and run at 65 mph: (a) depth, (b) width, and (c) length.
Table 1.
Ring selection and area coverage at different speeds.
Table 1.
Ring selection and area coverage at different speeds.
| Speed (mph) | Selected Ring # | FOV along the Traffic Direction | Overlap |
|---|
| 65 < speed ≤ 70 | #47–#78 | 3.19 | 0.17 |
| 60 < speed ≤ 65 | #48–#78 | 3.09 | 0.19 |
| 55 < speed ≤ 60 | #49–#78 | 2.87 | 0.19 |
| ≤55 | #53–#84 | 2.59 | 0.19 |
Table 2.
Summary of the potholes detected from a single scan.
Table 2.
Summary of the potholes detected from a single scan.
| Pothole # | Scan # | Estimated Length (in) | Actual Length (in) | Difference in Length (in) | Estimated Width (in) | Actual Width (in) | Difference in Width (in) | Estimated Depth (in) | Actual Depth (in) | Difference in Depth (in) | # of Rings |
|---|
| Pothole #1 | 156 | 18.16 | 18.60 | 0.44 | 17.31 | 16.22 | 1.09 | 2.11 | 2.06 | 0.05 | 7 |
| Pothole #2 | 156 | 7.58 | 8.10 | 0.52 | 16.08 | 15.10 | 0.98 | 1.82 | 1.79 | 0.03 | 4 |
| Pothole #3 | 156 | 32.62 | 34.35 | 1.73 | 8.78 | 9.10 | 0.32 | 1.68 | 1.52 | 0.16 | 13 |
Table 3.
Summary of the potholes detected on Interstate 75 South.
Table 3.
Summary of the potholes detected on Interstate 75 South.
| Pothole ID | Predicted Depth (Inches) | Actual Depth (Inches) | Error (Inches) | Predicted Width (Inches) | Actual Width (Inches) | Error (Inches) | Predicted Length (Inches) | Actual Length (Inches) | Error (Inches) | No. of Rings | Latitude | Longitude |
|---|
| 1 | 2.08 | 2.11 | 0.03 | 9.31 | 10.22 | 0.91 | 9.44 | 10.10 | 0.66 | 4 | 39.2050 | −84.4698 |
| 2 | 1.54 | 1.60 | 0.06 | 14.32 | 15.00 | 0.68 | 4.35 | 6.30 | 1.95 | 3 | 39.2051 | −84.4706 |
| 3 | 1.57 | 1.51 | 0.06 | 14.73 | 14.50 | 0.23 | 8.37 | 8.93 | 0.56 | 3 | 39.2052 | −84.4707 |
| 4 | 2.32 | 2.11 | 0.21 | 15.50 | 13.10 | 2.40 | 3.01 | 5.22 | 2.21 | 2 | 39.2052 | −84.4708 |
| 5 | 1.30 | 1.43 | 0.13 | 9.18 | 8.33 | 0.85 | 6.51 | 7.10 | 0.59 | 3 | 39.2052 | −84.4708 |
| 6 | 1.38 | 1.49 | 0.11 | 11.59 | 11.66 | 0.07 | 3.68 | 6.31 | 2.63 | 2 | 39.2052 | −84.4708 |
| 7 | 2.80 | 2.66 | 0.14 | 11.82 | 13.89 | 2.07 | 11.81 | 11.36 | 0.45 | 5 | 39.2052 | −84.4711 |
| 8 | 3.11 | 3.05 | 0.06 | 12.52 | 15.10 | 2.58 | 14.11 | 14.33 | 0.22 | 7 | 39.2052 | −84.4711 |
| 9 | 3.37 | 3.22 | 0.15 | 20.86 | 20.41 | 0.45 | 4.60 | 5.33 | 0.73 | 2 | 39.2053 | −84.4720 |
| 10 | 2.26 | 2.33 | 0.07 | 10.98 | 12.21 | 1.23 | 5.15 | 5.23 | 0.08 | 3 | 39.2054 | −84.4724 |
| 11 | 2.88 | 3.10 | 0.22 | 13.68 | 13.10 | 0.58 | 11.93 | 12.93 | 1.00 | 6 | 39.2054 | −84.4724 |
| 12 | 2.10 | 2.06 | 0.04 | 11.55 | 11.23 | 0.32 | 8.63 | 8.69 | 0.06 | 3 | 39.2055 | −84.4733 |
| 13 | 2.27 | 2.21 | 0.06 | 7.52 | 7.32 | 0.20 | 16.99 | 17.22 | 0.23 | 6 | 39.2056 | −84.4740 |
| 14 | 1.17 | 1.33 | 0.16 | 8.65 | 8.20 | 0.45 | 4.55 | 6.23 | 1.68 | 3 | 39.2057 | −84.4742 |
| 15 | 1.79 | 1.68 | 0.11 | 9.06 | 8.33 | 0.73 | 4.83 | 5.10 | 0.27 | 3 | 39.2063 | −84.4759 |
| 16 | 2.32 | 2.41 | 0.09 | 10.27 | 9.62 | 0.65 | 10.03 | 12.10 | 2.07 | 4 | 39.2063 | −84.4760 |
| 17 | 1.57 | 1.52 | 0.05 | 13.19 | 12.28 | 0.91 | 18.21 | 19.10 | 0.89 | 5 | 39.2064 | −84.4762 |
| 18 | 1.90 | 1.88 | 0.02 | 13.90 | 15.95 | 2.05 | 4.55 | 4.93 | 0.38 | 3 | 39.2050 | −84.4694 |
| 19 | 2.16 | 2.11 | 0.05 | 8.20 | 9.02 | 0.82 | 58.90 | 60.88 | 1.98 | 18 | 39.2050 | −84.4698 |
Table 4.
Summary of the potholes detected by two runs at 55 mph.
Table 4.
Summary of the potholes detected by two runs at 55 mph.
| Pothole # | Depth (Inches) | Width (Inches) | Length (Inches) |
|---|
| Actual | Run 1 | Run 2 | Error (Run 1) | Error (Run 2) | Actual | Run 1 | Run 2 | Error (Run 1) | Error (Run 2) | Actual | Run 1 | Run 2 | Error (Run 1) | Error (Run 2) |
|---|
| 1 | 2.67 | 2.76 | 2.94 | 0.09 | 0.27 | 14.33 | 13.89 | 15.34 | 0.44 | 1.01 | 12.10 | 11.31 | 10.59 | 0.79 | 1.51 |
| 2 | 1.88 | 1.66 | 1.85 | 0.22 | 0.03 | 11.94 | 12.63 | 10.85 | 0.69 | 1.09 | 11.61 | 8.93 | 10.66 | 2.68 | 0.95 |
| 3 | 2.12 | 2.08 | 2.16 | 0.04 | 0.04 | 9.11 | 9.39 | 10.04 | 0.28 | 0.93 | 26.53 | 23.58 | 21.38 | 2.95 | 5.15 |
| 4 | 1.92 | 1.94 | 1.82 | 0.02 | 0.10 | 9.61 | 8.12 | 9.22 | 1.49 | 0.39 | 11.47 | 11.46 | 9.41 | 0.01 | 2.06 |
Table 5.
Locations of the potholes detected by the two runs at 55 mph.
Table 5.
Locations of the potholes detected by the two runs at 55 mph.
| Pothole # | Run 1 | Run 2 | Difference in Pothole Location (m) |
|---|
| Latitude | Longitude | Latitude | Longitude |
|---|
| 1 | 39.14084 | −84.4837 | 39.14085 | −84.4837 | 1.28 |
| 2 | 39.14092 | −84.4836 | 39.14094 | −84.4836 | 2.01 |
| 3 | 39.14144 | −84.4831 | 39.14145 | −84.4831 | 1.3 |
| 4 | 39.14328 | −84.4727 | 39.14328 | −84.4727 | 1.13 |
Table 6.
Summary of the potholes detected at 55 mph and 65 mph.
Table 6.
Summary of the potholes detected at 55 mph and 65 mph.
| Pothole # | Depth (Inches) | Width (Inches) | Length (Inches) |
|---|
| Actual | 55 mph (Run 2) | 65 mph | Error 55 mph | Error 65 mph | Actual | 55 mph (Run 2) | 65 mph | Error 55 mph | Error 65 mph | Actual | 55 mph (Run 2) | 65 mph | Error 55 mph | Error 65 mph |
|---|
| 1 | 2.67 | 2.94 | 2.20 | 0.27 | 0.47 | 14.33 | 13.89 | 13.58 | 0.44 | 0.75 | 12.10 | 11.31 | 9.79 | 0.79 | 2.31 |
| 2 | 1.88 | 1.85 | 1.52 | 0.03 | 0.36 | 11.94 | 12.63 | 10.07 | 0.69 | 1.87 | 11.61 | 8.93 | 9.43 | 2.68 | 2.18 |
| 3 | 2.12 | 2.16 | 1.95 | 0.04 | 0.17 | 9.11 | 9.39 | 10.29 | 0.28 | 1.18 | 26.53 | 23.58 | 19.30 | 2.95 | 7.23 |
| 4 | 1.92 | 1.82 | 1.89 | 0.10 | 0.03 | 9.61 | 8.12 | 11.15 | 1.49 | 1.54 | 11.47 | 11.46 | 7.51 | 0.01 | 3.96 |
Table 7.
Locations of the potholes detected by the two runs at 55 mph and 65 mph.
Table 7.
Locations of the potholes detected by the two runs at 55 mph and 65 mph.
| Pothole # | 55 mph (Run 2) | 65 mph | Difference in Pothole Location (m) |
|---|
| Latitude | Longitude | Latitude | Longitude |
|---|
| 1 | 39.1408514 | −84.4836757 | 39.1408598 | −84.4836526 | 2.2 |
| 2 | 39.1409417 | −84.4835966 | 39.1409237 | −84.483596 | 2 |
| 3 | 39.1414454 | −84.4831496 | 39.1414564 | −84.4831238 | 2.53 |
| 4 | 39.1432827 | −84.4727397 | 39.1432729 | −84.4727203 | 1.99 |




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}