
Selection and Layout Optimization of Double Tower Cranes



Abstract
1. Introduction
2. Literature Review
2.1. Selection and Layout Planning of Tower Cranes
2.2. Optimization Problem
3. Methodology
3.1. Problem Description and Assumptions
- Known Conditions
- The coordinates of each vertex of the building outline are known;
- The coordinates of the demand points and supply points for components are known;
- The tower crane studied in this paper is a luffing jib tower crane, with the attachment path distance from the building outline denoted as dBTC, and dBTC = 4 m.
- Assumptions
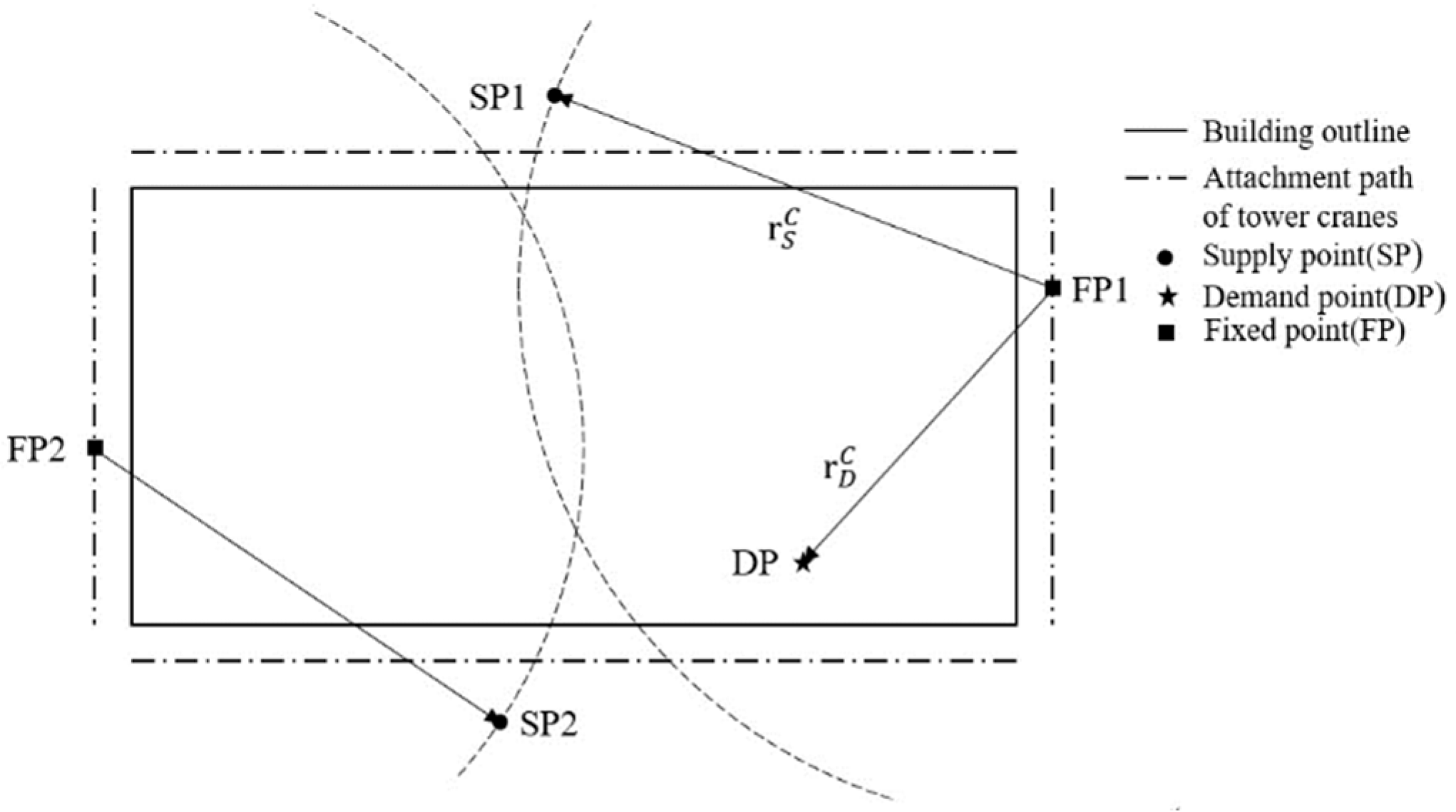
- In the mathematical model, the stacking and unloading/installation points of prefabricated components are simplified as points, without considering their spatial volume effects, referred to as supply points (SPs) and demand points (DPs), respectively.
- In the mathematical model, the base of the tower crane is simplified as a point, referred to as a fixed point (FP), without considering its spatial volume effects.
- The impact of terrain, roads, and obstacles on this study is not considered.
- Each lifting task is executed by only one tower crane, and both tower cranes perform lifting simultaneously. Task allocation is not considered.
- The spatial lifting problem is considered on standard floor levels, without considering staggered construction.
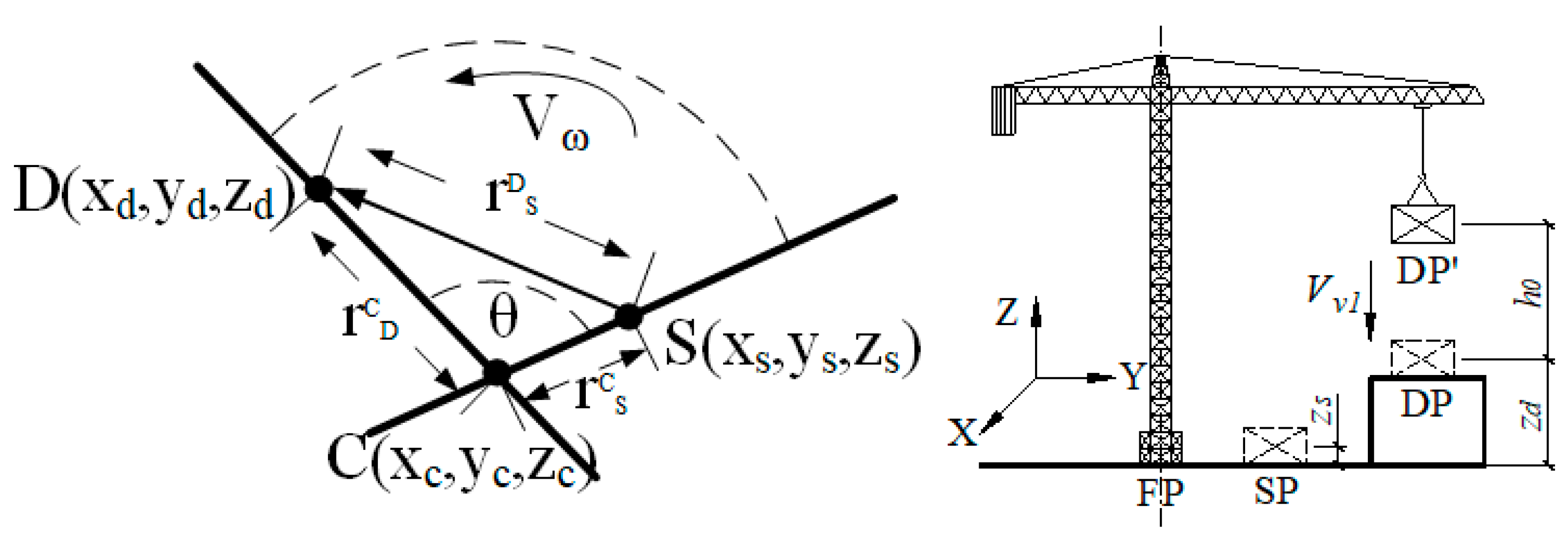
3.2. Variable Setting
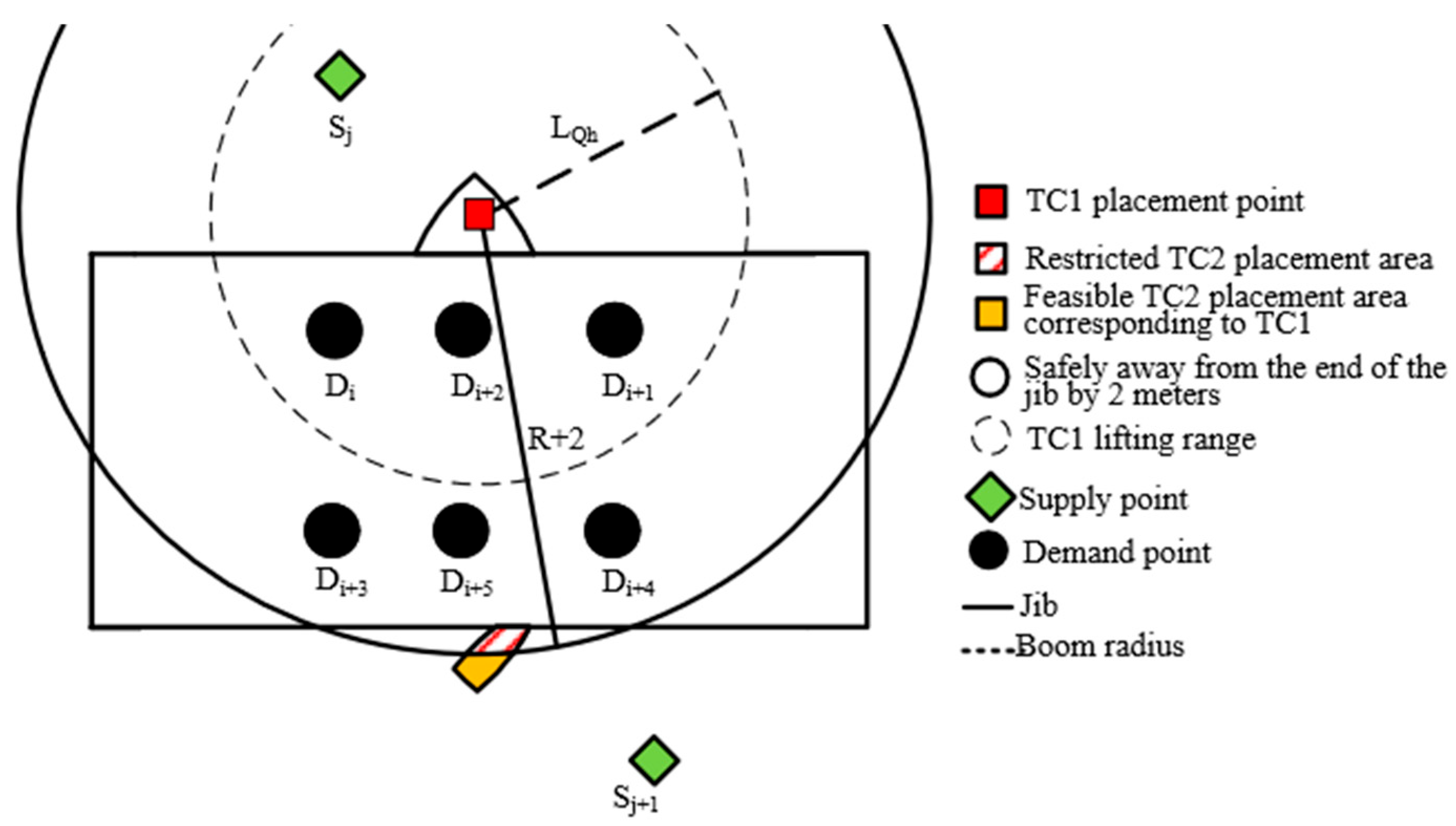
3.3. Model of Feasible Layout Area for Double Tower Cranes
- Applicability of Double Tower Cranes
- II.
- Layout Area of Double Tower Cranes
- III.
- Model of Feasible Layout Area for Double Tower Cranes

3.4. Model for Selection and Layout Optimization of Double Tower Cranes under Different Objectives
- I.
- Optimizing for Minimum Lifting Time
- II.
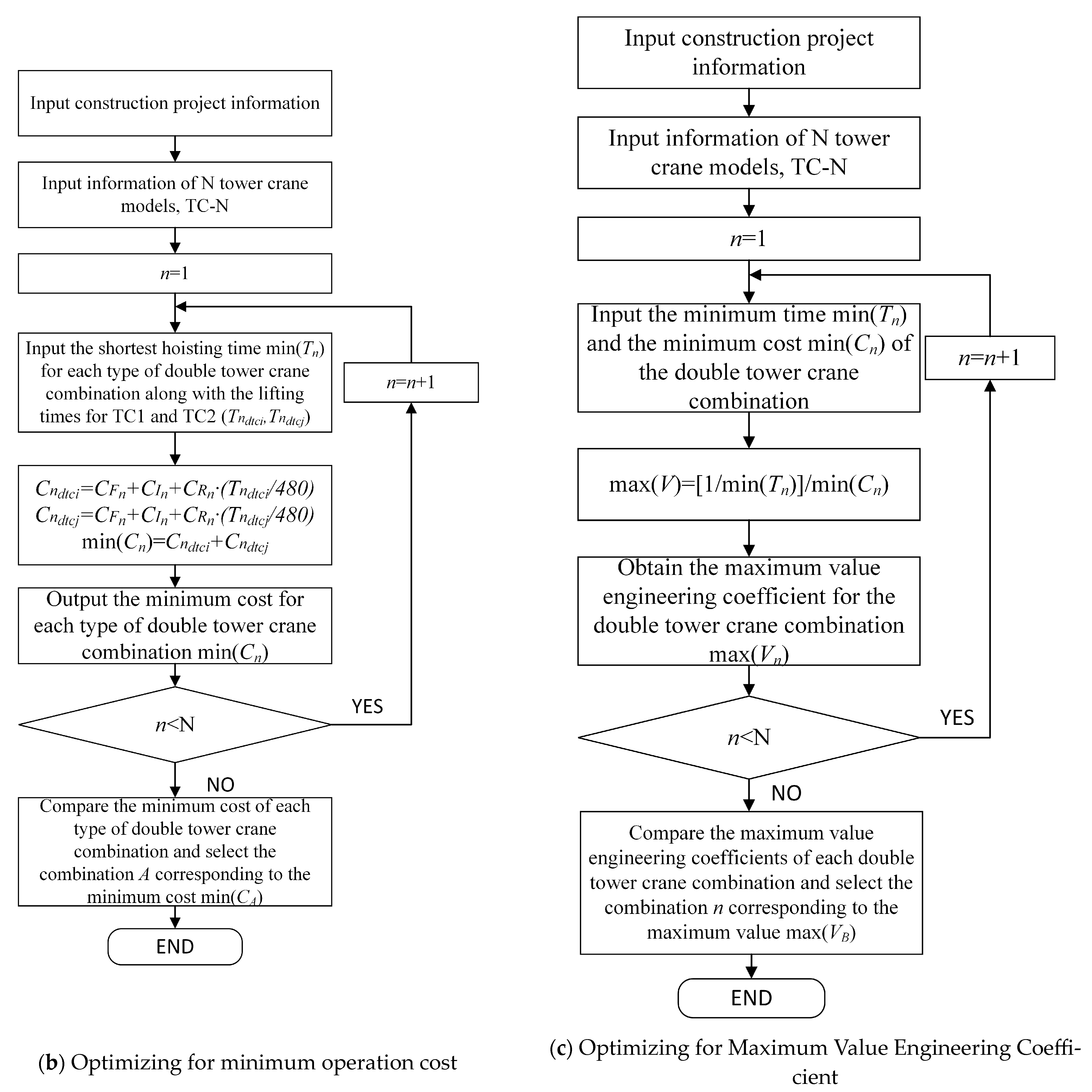
- Optimizing for Minimum operation cost
- III.
- Optimizing for Maximum Value Engineering Coefficient

4. Case Study
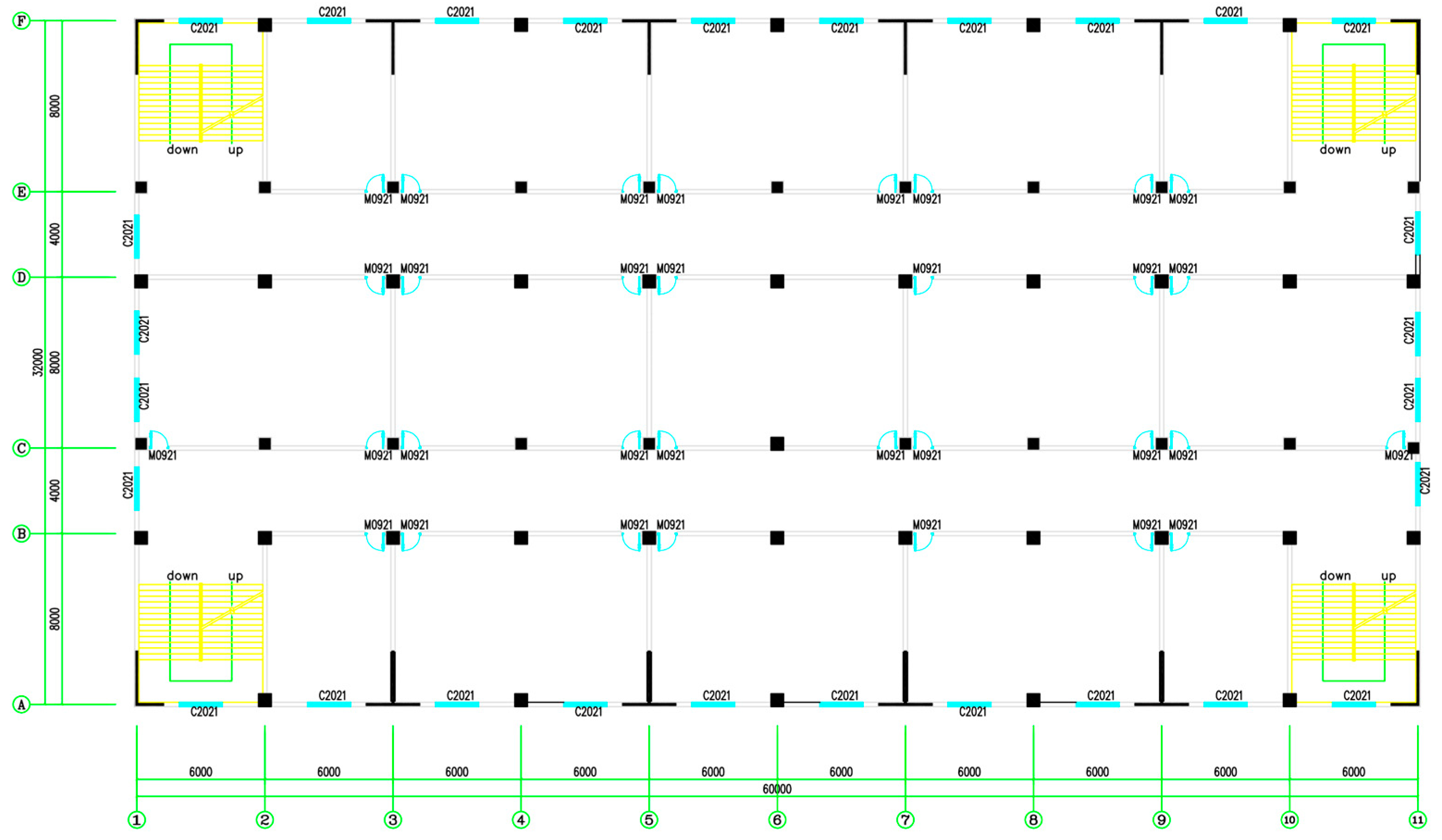
4.1. Case Overview
- I.
- Basic Information of Construction Site
- II.
- Tower Crane Basic Information
4.2. Results
- I.
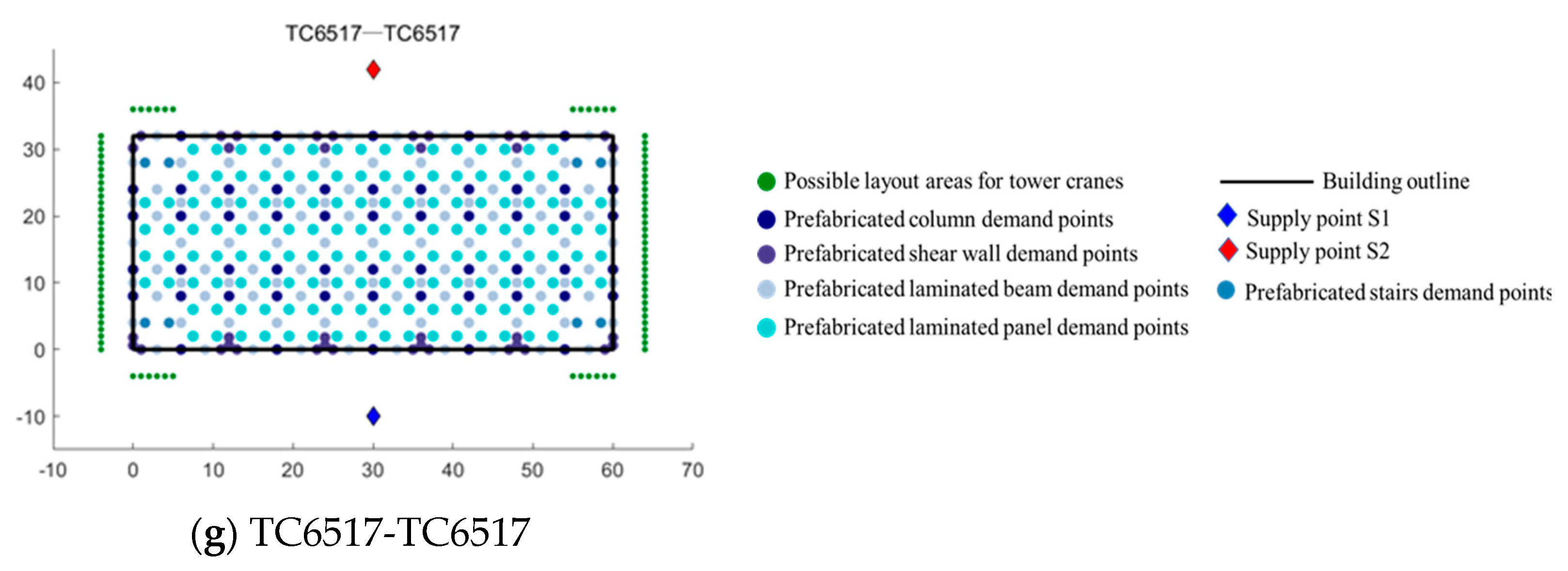
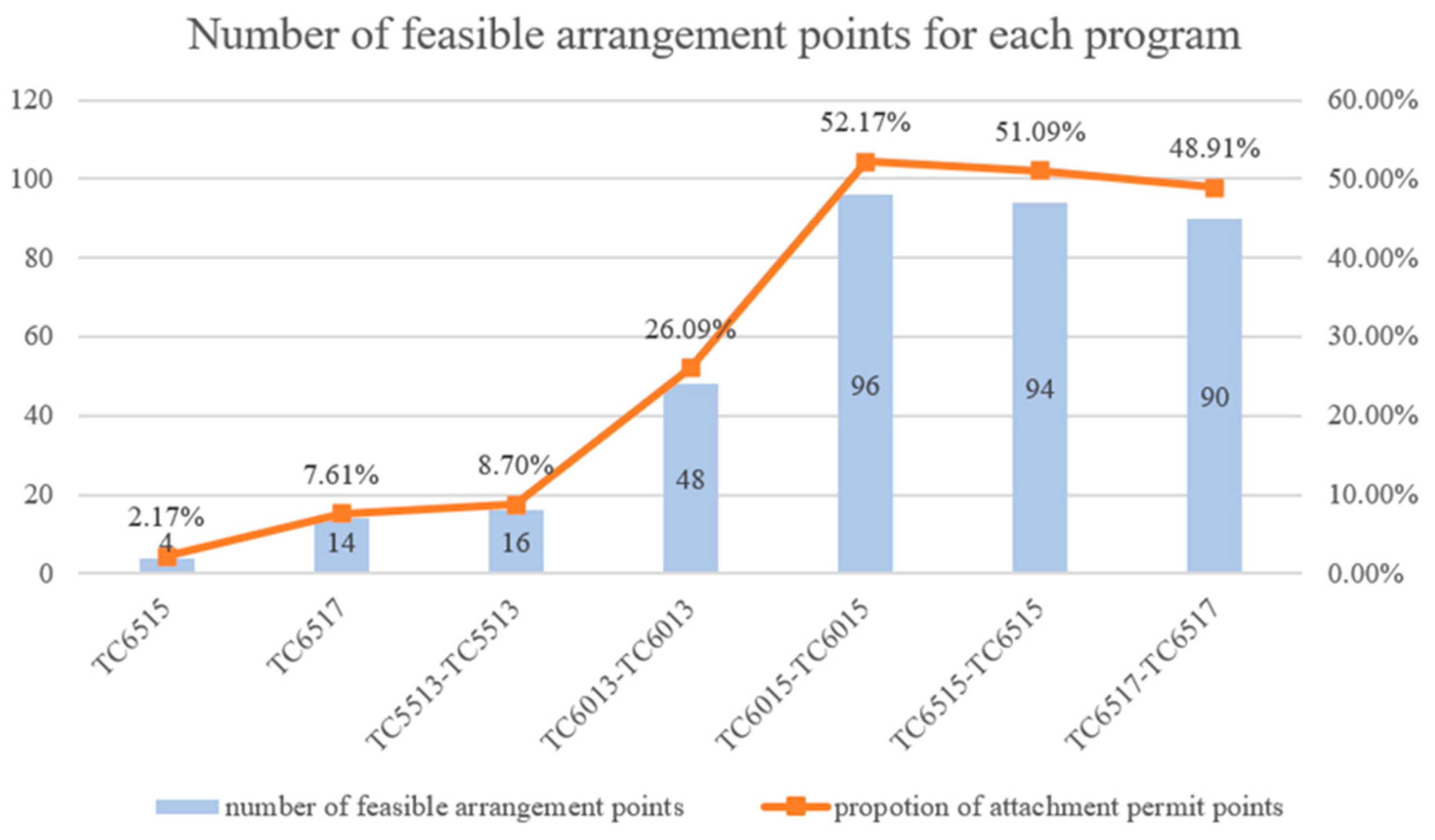
- Tower crane selection scheme feasible layout area solution results
- II.
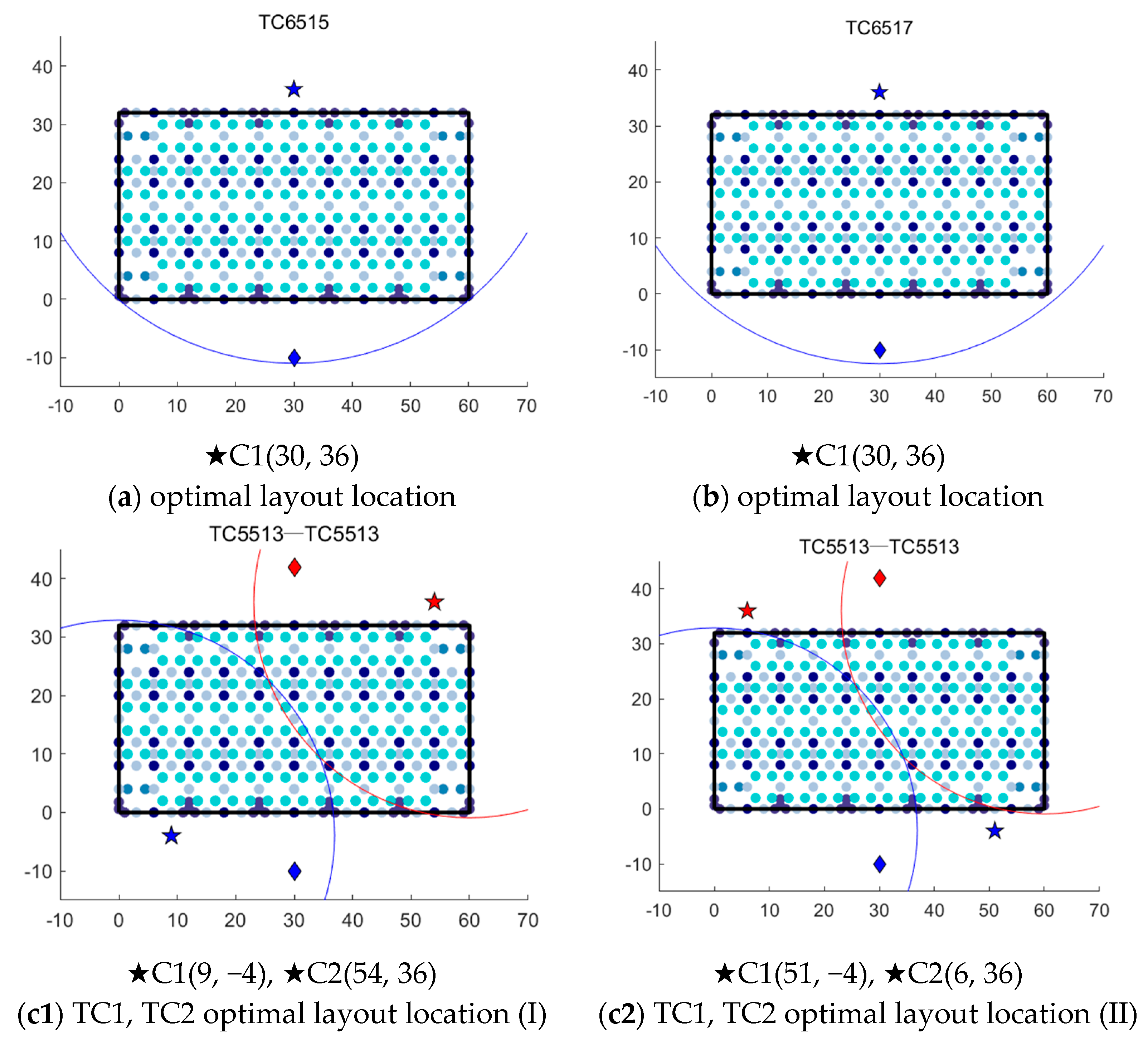
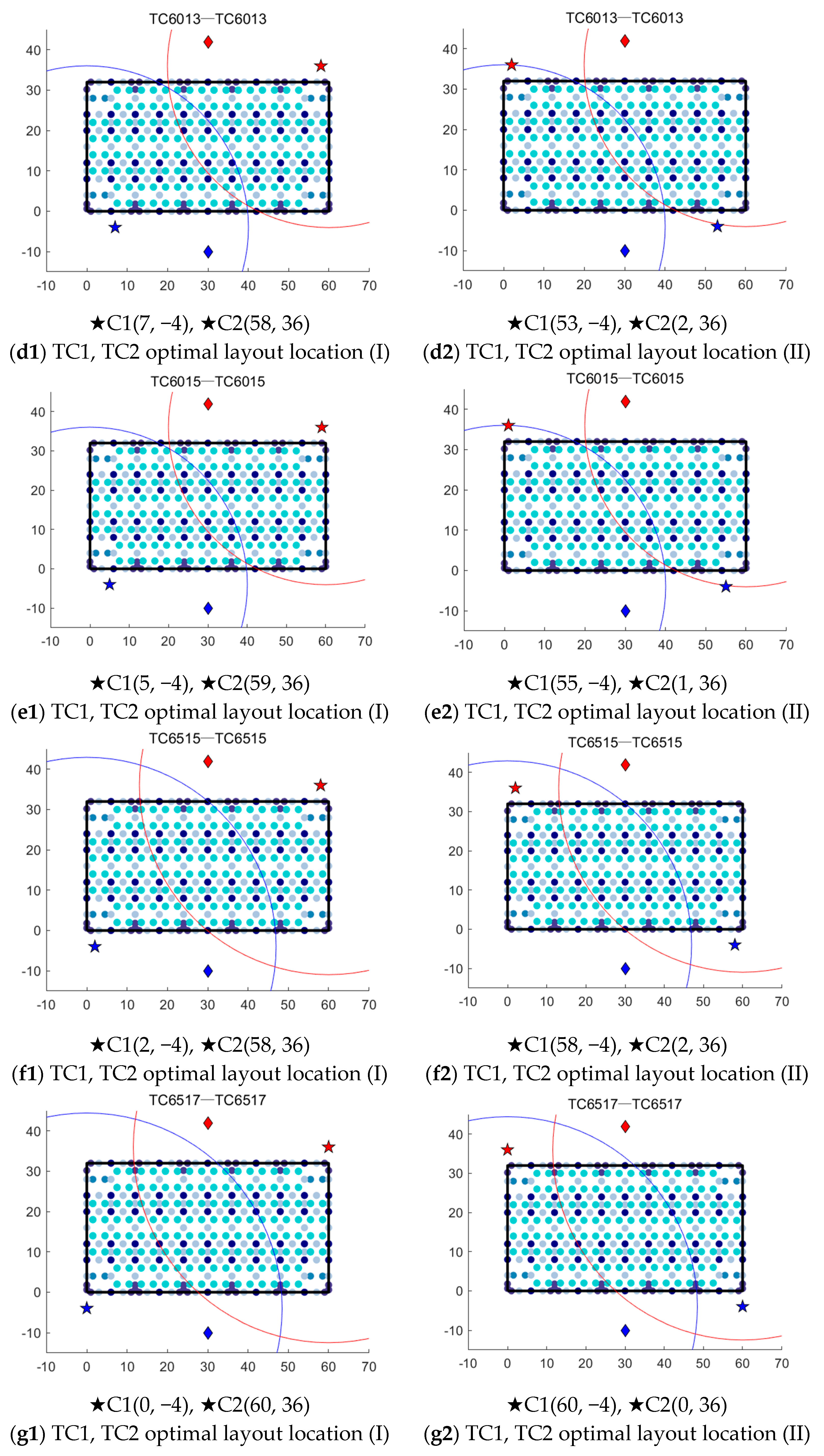
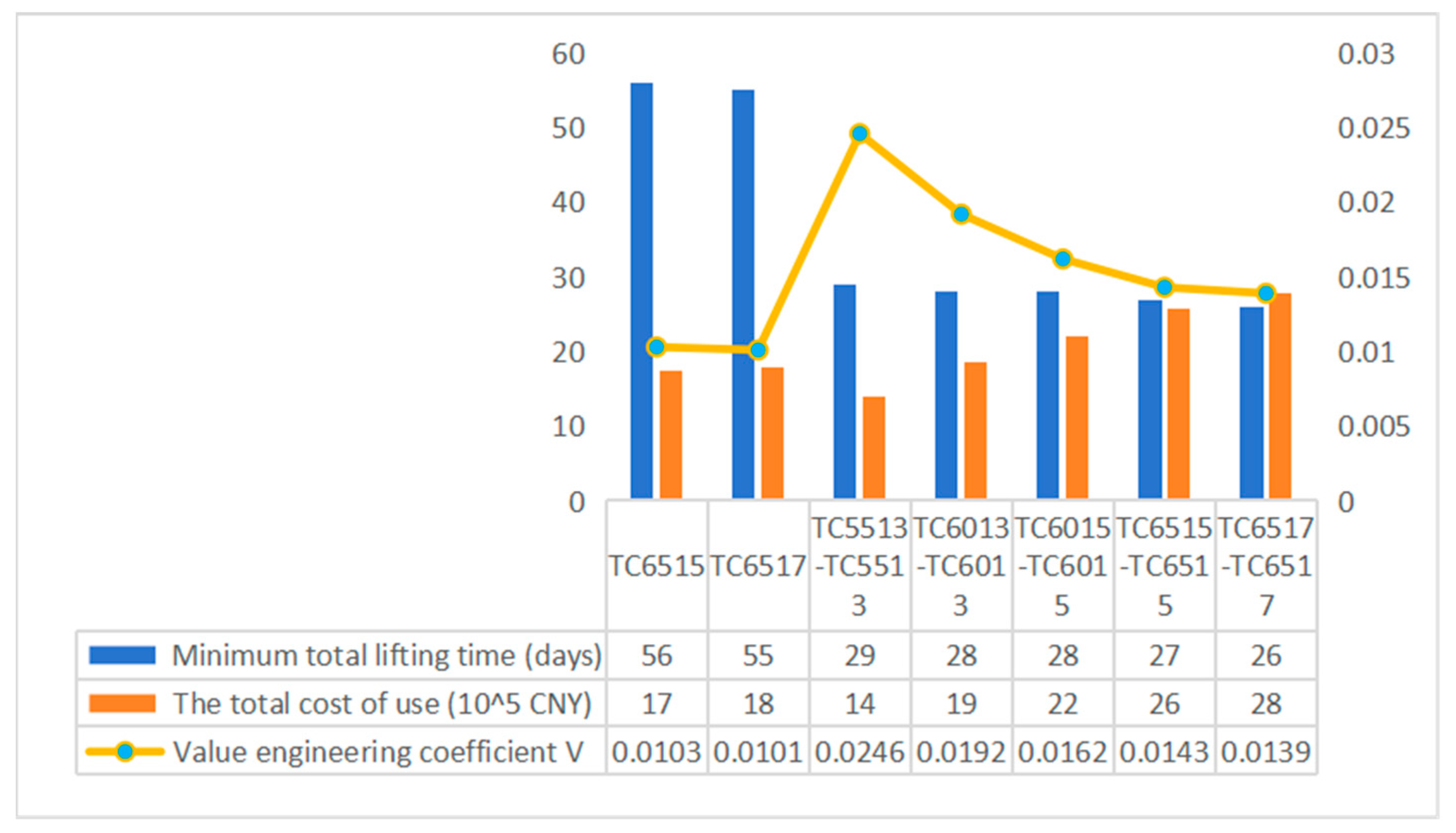
- Tower crane selection scheme layout optimization results
5. Discussion
5.1. Analysis of Feasible Layout Area Solution Results of Different Tower Crane Selection Scheme
5.2. Comparative Analysis of Optimal Tower Crane Selection and Layout Schemes under Different Objectives
5.3. Comparative Analysis of Single Tower Crane Schemes and Double Tower Crane Schemes Solutions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Descriptions |
|---|---|
| Horizontal coordinates of each vertex of the building outline | |
| Vertical coordinates of each vertex of the building outline | |
| Horizontal coordinates of each vertex of the construction site boundary line | |
| Vertical coordinates of each vertex of the construction site boundary line | |
| Horizontal coordinates of DP | |
| Vertical coordinates of DP | |
| Z coordinates of DP | |
| Available location for the tower crane in the project |
| Parameters | Descriptions |
|---|---|
| TC_n | Model of the tower crane |
| Rated lifting moment of the tower crane | |
| Maximum lifting radius corresponding to the lifting capacity of the tower crane | |
| Maximum lifting radius of the tower crane | |
| Minimum lifting radius of the tower crane | |
| en | The real number in the fitting function of the tower crane’s lifting radius Ln and lifting capacity |
| fn | The real number in the fitting function of the tower crane’s lifting radius Ln and lifting capacity |
| Types of Prefabricated Components | Identification Numbers of DP | Coordinates of DP | The Mass of the Prefabricated Components (t) | |
|---|---|---|---|---|
| Dx | Dy | |||
| Prefabricated column | C1~C5 | 6.0, 18.0, 30.0, 42.0, 54.0 | 0.0 | 2.5 |
| C6~C16 | 0.0, 6.0, 12.0, 18.0, 24.0, 30.0, 36.0, 42.0, 48.0, 54.0, 60.0 | 8.0 | 2.5 | |
| C17~C27 | 0.0, 6.0, 12.0, 18.0, 24.0, 30.0, 36.0, 42.0, 48.0, 54.0, 60.0 | 12.0 | 2.5 | |
| C28~C38 | 0.0, 6.0, 12.0, 18.0, 24.0, 30.0, 36.0, 42.0, 48.0, 54.0, 60.0 | 20.0 | 2.5 | |
| C39~C49 | 0.0, 6.0, 12.0, 18.0, 24.0, 30.0, 36.0, 42.0, 48.0, 54.0, 60.0 | 24.0 | 2.5 | |
| C50~C54 | 6.0, 18.0, 30.0, 42.0, 54.0 | 32.0 | 2.5 | |
| Prefabricated shear wall | W1~W10 | 1.0, 11.0, 13.0, 23.0, 25.0, 35.0, 37.0, 47.0, 49.0, 59.0 | 0.0 | 1.8 |
| W11~W16 | 0.0, 12.0, 24.0, 36.0, 48.0, 60.0 | 0.6 | 1.8 | |
| W17~W22 | 0.0, 12.0, 24.0, 36.0, 48.0, 60.0 | 1.8 | 1.8 | |
| W23~W28 | 0.0, 12.0, 24.0, 36.0, 48.0, 60.0 | 30.2 | 1.8 | |
| W29~W34 | 0.0, 12.0, 24.0, 36.0, 48.0, 60.0 | 31.4 | 1.8 | |
| W35~W44 | 1.0, 11.0, 13.0, 23.0, 25.0, 35.0, 37.0, 47.0, 49.0, 59.0 | 32.0 | 1.8 | |
| Prefabricated staircase | S1~S4 | 1.5, 4.5, 55.5, 58.5 | 4.0 | 2.6 |
| S5~S8 | 1.5, 4.5, 55.5, 58.5 | 28.0 | 2.6 | |
| Prefabricated composite beam | B1~B10 | 3.0, 9.0, 15.0, 21.0, 27.0, 33.0, 39.0, 45.0, 51.0, 57.0 | 0.0 | 2.5 |
| B11~B21 | 0.0, 6.0, 12.0, 18.0, 24.0, 30.0, 36.0, 42.0, 48.0, 54.0, 60.0 | 4.0 | 3.0 | |
| B22~B31 | 3.0, 9.0, 15.0, 21.0, 27.0, 33.0, 39.0, 45.0, 51.0, 57.0 | 8.0 | 2.5 | |
| B32~B42 | 0.0, 6.0, 12.0, 18.0, 24.0, 30.0, 36.0, 42.0, 48.0, 54.0, 60.0 | 10.0 | 1.5 | |
| B43~B52 | 3.0, 9.0, 15.0, 21.0, 27.0, 33.0, 39.0, 45.0, 51.0, 57.0 | 12.0 | 2.5 | |
| B53~B63 | 0.0, 6.0, 12.0, 18.0, 24.0, 30.0, 36.0, 42.0, 48.0, 54.0, 60.0 | 16.0 | 3.0 | |
| B64~B73 | 3.0, 9.0, 15.0, 21.0, 27.0, 33.0, 39.0, 45.0, 51.0, 57.0 | 20.0 | 2.5 | |
| B74~B84 | 0.0, 6.0, 12.0, 18.0, 24.0, 30.0, 36.0, 42.0, 48.0, 54.0, 60.0 | 22.0 | 1.5 | |
| B85~B94 | 3.0, 9.0, 15.0, 21.0, 27.0, 33.0, 39.0, 45.0, 51.0, 57.0 | 24.0 | 2.5 | |
| B95~B105 | 0.0, 6.0, 12.0, 18.0, 24.0, 30.0, 36.0, 42.0, 48.0, 54.0, 60.0 | 28.0 | 3.0 | |
| B106~B115 | 3.0, 9.0, 15.0, 21.0, 27.0, 33.0, 39.0, 45.0, 51.0, 57.0 | 32.0 | 2.5 | |
| Prefabricated composite panel | F1~F16 | 7.5, 10.5, 13.5, 16.5, 19.5, 22.5, 25.5, 28.5, 31.5, 34.5, 37.5, 40.5, 43.5, 46.5, 49.5, 52.5 | 2.0 | 1.7 |
| F17~F32 | 7.5, 10.5, 13.5, 16.5, 19.5, 22.5, 25.5, 28.5, 31.5, 34.5, 37.5, 40.5, 43.5, 46.5, 49.5, 52.5 | 6.0 | 1.7 | |
| F33~F52 | 1.5, 4.5, 7.5, 10.5, 13.5, 16.5, 19.5, 22.5, 25.5, 28.5, 31.5, 34.5, 37.5, 40.5, 43.5, 46.5, 49.5, 52.5, 55.5, 58.5 | 10.0 | 1.7 | |
| F53~F72 | 1.5, 4.5, 7.5, 10.5, 13.5, 16.5, 19.5, 22.5, 25.5, 28.5, 31.5, 34.5, 37.5, 40.5, 43.5, 46.5, 49.5, 52.5, 55.5, 58.5 | 14.0 | 1.7 | |
| F73~F92 | 1.5, 4.5, 7.5, 10.5, 13.5, 16.5, 19.5, 22.5, 25.5, 28.5, 31.5, 34.5, 37.5, 40.5, 43.5, 46.5, 49.5, 52.5, 55.5, 58.5 | 18.0 | 1.7 | |
| F93~F112 | 1.5, 4.5, 7.5, 10.5, 13.5, 16.5, 19.5, 22.5, 25.5, 28.5, 31.5, 34.5, 37.5, 40.5, 43.5, 46.5, 49.5, 52.5, 55.5, 58.5 | 22.0 | 1.7 | |
| F113~F128 | 7.5, 10.5, 13.5, 16.5, 19.5, 22.5, 25.5, 28.5, 31.5, 34.5, 37.5, 40.5, 43.5, 46.5, 49.5, 52.5 | 26.0 | 1.7 | |
| F129~F144 | 7.5, 10.5, 13.5, 16.5, 19.5, 22.5, 25.5, 28.5, 31.5, 34.5, 37.5, 40.5, 43.5, 46.5, 49.5, 52.5 | 30.0 | 1.7 | |
References
- Ferdous, W.; Bai, Y.; Tuan Duc, N.; Manalo, A.; Mendis, P. New advancements, challenges and opportunities of multi-storey modular buildings—A state-of-the-art review. Eng. Struct. 2019, 183, 883–893. [Google Scholar] [CrossRef]
- Hussein, M.; Zayed, T. Crane operations and planning in modular integrated construction: Mixed review of literature. Autom. Constr. 2021, 122, 103466. [Google Scholar] [CrossRef]
- Lin, J. Research on Layout Optimization of Double Tower Cranes in Prefabricated Buildings. Master’s Thesis, Chonqing University, Chongqing, China, 2021. [Google Scholar]
- Li, H.; Li, X. A Branch-and-Bound Algorithm for the Bi-Objective Quay Crane Scheduling Problem Based on Efficiency and Energy. Mathematics 2022, 10, 4705. [Google Scholar] [CrossRef]
- Marzouk, M.; Abubakr, A. Decision support for tower crane selection with building information models and genetic algorithms. Autom. Constr. 2016, 61, 1–15. [Google Scholar] [CrossRef]
- Yang, B.; Fang, T.; Luo, X.; Liu, B.; Dong, M. A BIM-Based Approach to Automated Prefabricated Building Construction Site Layout Planning. Ksce J. Civ. Eng. 2022, 26, 1535–1552. [Google Scholar] [CrossRef]
- Lien, L.-C.; Cheng, M.-Y. Particle bee algorithm for tower crane layout with material quantity supply and demand optimization. Autom. Constr. 2014, 45, 25–32. [Google Scholar] [CrossRef]
- Choi, C.W.; Harris, F.C. A model for determining optimum crane position. Proc. Inst. Civ. Eng. Part 1-Des. Constr. 1991, 90, 627–634. [Google Scholar] [CrossRef]
- Nadoushani, Z.S.M.; Hammad, A.W.A.; Akbarnezhad, A. Location Optimization of Tower Crane and Allocation of Material Supply Points in a Construction Site Considering Operating and Rental Costs. J. Constr. Eng. Manag. 2017, 143, 04016089. [Google Scholar] [CrossRef]
- Zhang, P.; Harris, F.C.; Olomolaiye, P.O. A computer-based model for optimizing the location of a single tower crane. Build. Res. Inf. 1996, 24, 113–123. [Google Scholar] [CrossRef]
- Huang, C.; Wong, C.K.; Tam, C.M. Optimization of tower crane and material supply locations in a high-rise building site by mixed-integer linear programming. Autom. Constr. 2011, 20, 571–580. [Google Scholar] [CrossRef]
- Huang, C.; Wong, C.K. Optimization of crane setup location and servicing schedule for urgent material requests with non-homogeneous and non-fixed material supply. Autom. Constr. 2018, 89, 183–198. [Google Scholar] [CrossRef]
- Zhang, P.; Harris, F.C.; Olomolaiye, P.O.; Holt, G.D. Location optimization for a group of tower cranes. J. Constr. Eng. Manag. Asce 1999, 125, 115–122. [Google Scholar] [CrossRef]
- Dienstknecht, M. A branch and bound approach for the tower crane selection and positioning problem with respect to mutual interference. 4OR Q. J. Oper. Res. 2023, 21, 105–123. [Google Scholar] [CrossRef]
- Briskorn, D.; Dienstknecht, M. Covering polygons with discs: The problem of crane selection and location on construction sites. Omega-Int. J. Manag. Sci. 2020, 97, 102114. [Google Scholar] [CrossRef]
- Peng, B.; Flager, F.L.; Wu, J. A method to optimize mobile crane and crew interactions to minimize construction cost and time. Autom. Constr. 2018, 95, 10–19. [Google Scholar] [CrossRef]
- Ji, Y.; Leite, F. Optimized Planning Approach for Multiple Tower Cranes and Material Supply Points Using Mixed-Integer Programming. J. Constr. Eng. Manag. 2020, 146, 04020007. [Google Scholar] [CrossRef]
- Li, R.; Chi, H.-L.; Peng, Z.; Li, X.; Chan, A.P.C. Automatic tower crane layout planning system for high-rise building construction using generative adversarial network. Adv. Eng. Inform. 2023, 58, 102202. [Google Scholar] [CrossRef]
- Briskorn, D.; Dienstknecht, M. Mixed-integer programming models for tower crane selection and positioning with respect to mutual interference. Eur. J. Oper. Res. 2019, 273, 160–174. [Google Scholar] [CrossRef]
- Khodabandelu, A.; Park, J.; Arteaga, C. Crane operation planning in overlapping areas through dynamic supply selection. Autom. Constr. 2020, 117, 103253. [Google Scholar] [CrossRef]
- Wu, K.; de Soto, B.G.; Zhang, F. Spatio-temporal planning for tower cranes in construction projects with simulated annealing. Autom. Constr. 2020, 111, 103060. [Google Scholar] [CrossRef]
- Riga, K.; Jahr, K.; Thielen, C.; Borrmann, A. Mixed integer programming for dynamic tower crane and storage area optimization on construction sites. Autom. Constr. 2020, 120, 103259. [Google Scholar] [CrossRef]
- Dasovic, B.; Galic, M.; Klansek, U. Active BIM Approach to Optimize Work Facilities and Tower Crane Locations on Construction Sites with Repetitive Operations. Buildings 2019, 9, 21. [Google Scholar] [CrossRef]
- Zhang, Z.; Pan, W. Virtual reality supported interactive tower crane layout planning for high-rise modular integrated construction. Autom. Constr. 2021, 130, 103854. [Google Scholar] [CrossRef]
- Amiri, R.; Sardroud, J.M.; Kermani, V.M. Decision support system for tower crane location and material supply point in construction sites using an integer linear programming model. Eng. Constr. Archit. Manag. 2023, 30, 1444–1462. [Google Scholar] [CrossRef]
- Tam, C.M.; Tong, T.K.L.; Chan, W.K.W. Genetic algorithm for optimizing supply locations around tower crane. J. Constr. Eng. Manag. Asce 2001, 127, 315–321. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, X.; Shou, W.; Wang, X.; Xu, B.; Kim, M.J.; Wu, P. A BIM-based approach for automated tower crane layout planning. Autom. Constr. 2015, 59, 168–178. [Google Scholar] [CrossRef]
- Zhang, Z.; Pan, W. Multi-criteria decision analysis for tower crane layout planning in high-rise modular integrated construction. Autom. Constr. 2021, 127, 103709. [Google Scholar] [CrossRef]
- Javier Irizarry, E.P.K. Optimizing location of tower cranes on construction sites through GIS and BIM integration. J. Inf. Technol. Constr. 2012, 17, 351–366. [Google Scholar]
- Huang, C.; Wang, Z.K.; Li, B.; Wang, C.; Xu, L.S.; Jiang, K.; Liu, M.; Guo, C.X.; Zhao, X.F.; Yang, H. Discretized Cell Modeling for Optimal Layout of Multiple Tower Cranes. J. Constr. Eng. Manag. 2023, 149, 04023068. [Google Scholar] [CrossRef]




| No. | Research Objects | Research Objectives | Improved Mathematical Modeling 1 | Optimization Algorithm | Auxiliary Tools | Research |
|---|---|---|---|---|---|---|
| 1 | Single Tower Crane | Minimizing total cost | MIP | \ 2 | \ | Nadoushani [9] |
| 2 | Minimizing total cost | MILP | \ | BIM | Briskorn [19] | |
| 3 | Minimizing total cost | \ | SA | \ | Wu [21] | |
| 4 | Minimizing total cost | ILP | \ | \ | Amiri [25] | |
| 5 | Minimizing total time | \ | \ | GAN | Li [18] | |
| 6 | Minimizing total cost and time | \ | GA | \ | Tam [26] | |
| 7 | Minimizing total cost and time | MIP | \ | \ | Ji [17] | |
| 8 | Shortest hook movement distance | BMIP | \ | \ | Huang [12] | |
| 9 | Multiple Tower Cranes | Minimizing total cost | \ | PSO | \ | Lien and Cheng [7] |
| 10 | Minimizing total time | \ | FA | BIM | Wang [27] | |
| 11 | Safety and minimizing total time | \ | \ | Fuzzy Analytic Hierarchy Process | Zhang [28] | |
| 12 | Safety and minimizing total time | \ | \ | VR | Zhang [24] | |
| 13 | Balancing workload and minimizing path conflicts | \ | \ | \ | Zhang [13] | |
| 14 | Minimizing path conflicts and maximizing coverage area | \ | \ | BIM&GIS | Irizarry [29] | |
| 15 | Minimizing path conflicts and minimizing idle time | \ | GA | BIM | Marzouk [5] | |
| 16 | Precisely describing irregularly shaped sites and buildings | MILP | \ | \ | Huang [30] |
| Parameters | Descriptions |
|---|---|
| Horizontal projection distance from FP to DP | |
| Horizontal projection distance from FP to SP | |
| Horizontal projection distance from DP to SP | |
| Jib radius | |
| Rotation speed of the tower crane | |
| Rotation angle of the tower crane | |
| Time for trolley to complete radial movement | |
| Time for jib to complete horizontal rotation | |
| Speed of the trolley moving radially while loaded | |
| Speed of the trolley moving radially while unloaded | |
| Coordination degree between trolley motion and jib rotation | |
| Total horizontal movement time | |
| Safety height | |
| Lifting time | |
| Lowering time | |
| Total vertical movement time | |
| Vertical movement speed of loaded tower crane | |
| Vertical movement speed of unloaded tower crane | |
| Z-coordinate of DP | |
| Z-coordinate of SP | |
| Coordination level between horizontal and vertical movements of the tower crane | |
| Time to complete all lifting tasks | |
| Unloading time of the hook at DP | |
| Loading time of the hook at SP | |
| Total time of the project lifting works | |
| Total lifting time of TC1 | |
| Total lifting time of TC2 | |
| Number of components handled by TC1 | |
| Number of components handled by TC2 | |
| Number of floors requiring lifting operations | |
| Time for a single lifting task when TC1 is located at | |
| Time for a single lifting task when TC2 is located at | |
| Total operation cost of the tower cranes | |
| Operating cost of TC1 | |
| Operating cost of TC2 | |
| Cost of foundation construction for TC1 | |
| Cost of foundation construction for TC2 | |
| Cost of installation and dismantling for TC1 | |
| Cost of installation and dismantling for TC2 | |
| Rental cost per day for TC1 | |
| Rental cost per day for TC2 | |
| Value engineering coefficient |
| Title 1 | Coordinates of Supply Points | |
|---|---|---|
| Sx | Sy | |
| SP1 | 30.0 | 42.0 |
| SP2 | 30.0 | −10.0 |
| Parameter Information | Tower Crane Models | ||||
|---|---|---|---|---|---|
| TC5513 | TC6013 | TC6015 | TC6515 | TC6517 | |
| Maximum lifting height (m) | 150 | 150 | 150 | 150 | 150 |
| Maximum lifting boom width (m) | 55 | 60 | 60 | 65 | 65 |
| Minimum lifting boom width (m) | 2.5 | 2.5 | 2.5 | 2.5 | 2.5 |
| Lifting boom length (m) | 56 | 61.03 | 61.74 | 66.00 | 66.75 |
| Maximum lifting capacity (t) | 8 | 6 | 10 | 12 | 12 |
| Rotation speed (rad/min) | 4.4 | 4.4 | 4.4 | 4.4 | 4.4 |
| Load variation speed (m/min) | 20 | 25 | 25 | 25 | 25 |
| No-load variable speed (m/min) | 50 | 55 | 55 | 55 | 55 |
| Load take-off and landing speed (m/min) | 40 | 50 | 70 | 80 | 100 |
| No-load take-off and landing speed (m/min) | 100 | 100 | 100 | 100 | 100 |
| Rental fees (RMB/d) | 600 | 1000 | 1300 | 1500 | 1600 |
| Access and installation costs (RMB) | 32,000 | 40,000 | 45,000 | 55,000 | 60,000 |
| Basic production costs (RMB) | 21,000 | 25,000 | 29,000 | 35,000 | 38,000 |
| Scheme Number | Tower Crane Model Combination |
|---|---|
| 1 | TC6515 |
| 2 | TC6517 |
| 3 | TC5513-TC5513 |
| 4 | TC6013-TC6013 |
| 5 | TC6015-TC6015 |
| 6 | TC6515-TC6515 |
| 7 | TC6517-TC6517 |
| Selection Schemes | Tower Crane Model Combination | Optimal Timing Positioning (I), (II) | Minimum Total Lifting Time Min (Ttotal) | The Total Cost of Use (CNY) | Value Engineering Coefficient V | |
|---|---|---|---|---|---|---|
| 1 | TC6515 | C1(30, 36) | \ | 26,607.06 | 173,147.07 | 0.0103 |
| 2 | TC6517 | C1(30, 36) | \ | 26,193.57 | 179,854.92 | 0.0101 |
| 3 | TC5513-TC5513 | C1(9, −4) C2(57, 36) | C1(51, −4) C2(3, 36) | 13,766.99 | 140,417.48 | 0.0246 |
| 4 | TC6013-TC6013 | C1(7, −4) C2(58, 36) | C1(53, −4) C2(2, 36) | 13,376.73 | 185,736.38 | 0.0192 |
| 5 | TC6015-TC6015 | C1(55, −4) C2(1, 36) | C1(5, −4) C2(59, 36) | 13,307.26 | 220,080.99 | 0.0162 |
| 6 | TC6515-TC6515 | C1(2, −4) C2(58, 36) | C1(58, −4) C2(2, 36) | 12,507.29 | 258,170.57 | 0.0143 |
| 7 | TC6517-TC6517 | C1(0, −4) C2(60, 36) | C1(60, −4) C2(0, 36) | 12,244.21 | 277,628.07 | 0.0139 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Y.; Bu, J.; Lin, J.; Liu, J.; Zhang, C. Selection and Layout Optimization of Double Tower Cranes. Buildings 2024, 14, 1705. https://doi.org/10.3390/buildings14061705
Fu Y, Bu J, Lin J, Liu J, Zhang C. Selection and Layout Optimization of Double Tower Cranes. Buildings. 2024; 14(6):1705. https://doi.org/10.3390/buildings14061705
Chicago/Turabian StyleFu, Yan, Jiarui Bu, Jingjun Lin, Jun Liu, and Chunli Zhang. 2024. "Selection and Layout Optimization of Double Tower Cranes" Buildings 14, no. 6: 1705. https://doi.org/10.3390/buildings14061705
APA StyleFu, Y., Bu, J., Lin, J., Liu, J., & Zhang, C. (2024). Selection and Layout Optimization of Double Tower Cranes. Buildings, 14(6), 1705. https://doi.org/10.3390/buildings14061705