
Improved State-Space Approach Based on Lumped Mass Matrix for Transient Analysis of Large-Scale Locally Nonlinear Structures


Abstract
1. Introduction
2. Basic Theory
2.1. Uniaxial Stress–Strain Relationship
2.2. Sectional Force–Deformation Relationship of EBB Element
2.3. Force–Displacement Relationship of EBB Element
2.4. Equation of Motion of EBB Element
2.5. Equation of Linear Viscous Damper
2.6. Structural Governing Equation
2.7. Original State-Space Approach (SSA)
3. Improved State-Space Approach (I-SSA)
4. Numerical Implementation
- Step 1: set the total time T, time interval , damping coefficient ck of LVDs, and damping ratio coefficients and of the ith and jth modes, respectively. Assemble the structural mass M and initial stiffness K. Form sub-matrices M1, K11, K12, K12, and K22. Compute , , and .
- Step 2: perform eigenvalue analysis to obtain the angular frequencies and of the ith and jth modes, respectively. Obtain the coefficients a0 and a1 using Equation (24).
- Step 3: compute the additional matrix and , then obtain the damping matrix and the transition matrix .
- Step 4: obtain , , , and .
- Step 5: set i = 0, , and .
- Step 6: set k = 0, , update , , and , where .
- Step 7: compute , and then obtain the whole state variable using .
- Step 8: perform state determinations of all nonlinear elements based on the whole state variable , then acquire the structural NFC and compute , where .
- Step 9: compute and obtain the updated whole state variable .
- Step 10: set k = k + 1.
- Step 11: determine whether or (where and are the specified tolerances of incremental displacement and unbalanced force, respectively). If yes, continue to the next step; otherwise, go to Step 8.
- Step 12: set i = i + 1 and .
- Step 13: if i < N, go to Step 6; otherwise, terminate the analysis.
5. Numerical Applications
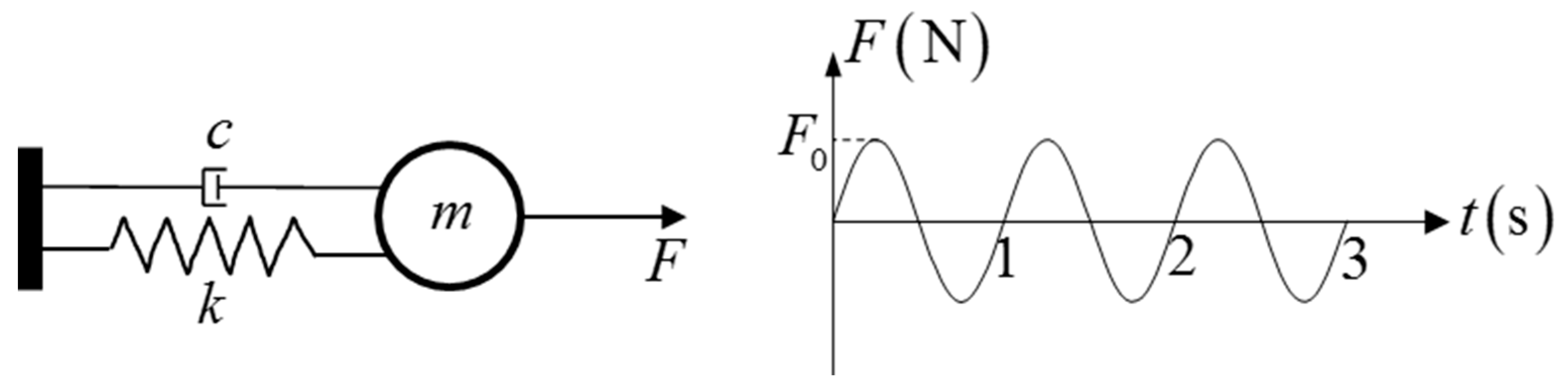
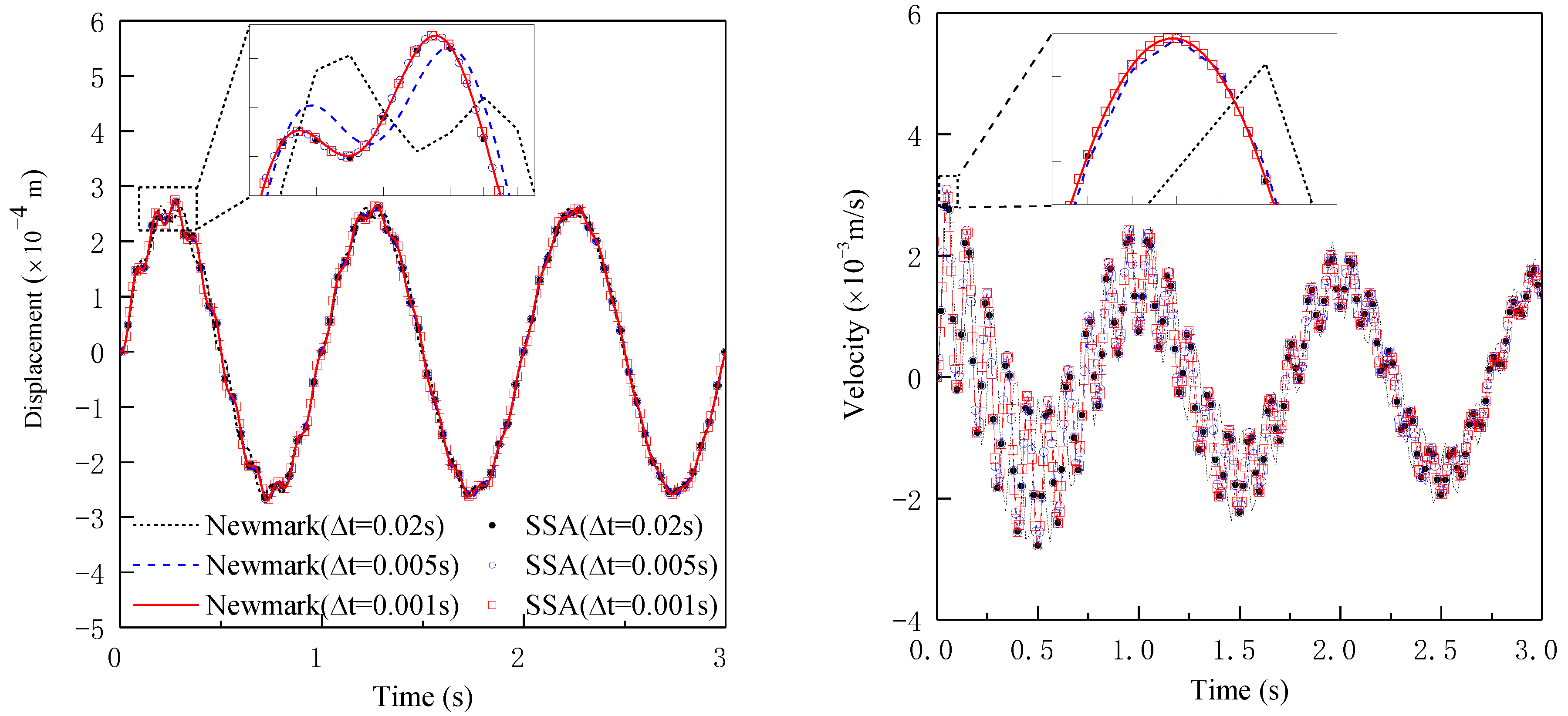
5.1. SDOF System
5.2. Fifteen-Storey 3-Bay Plane Frame
5.2.1. FE Model Description
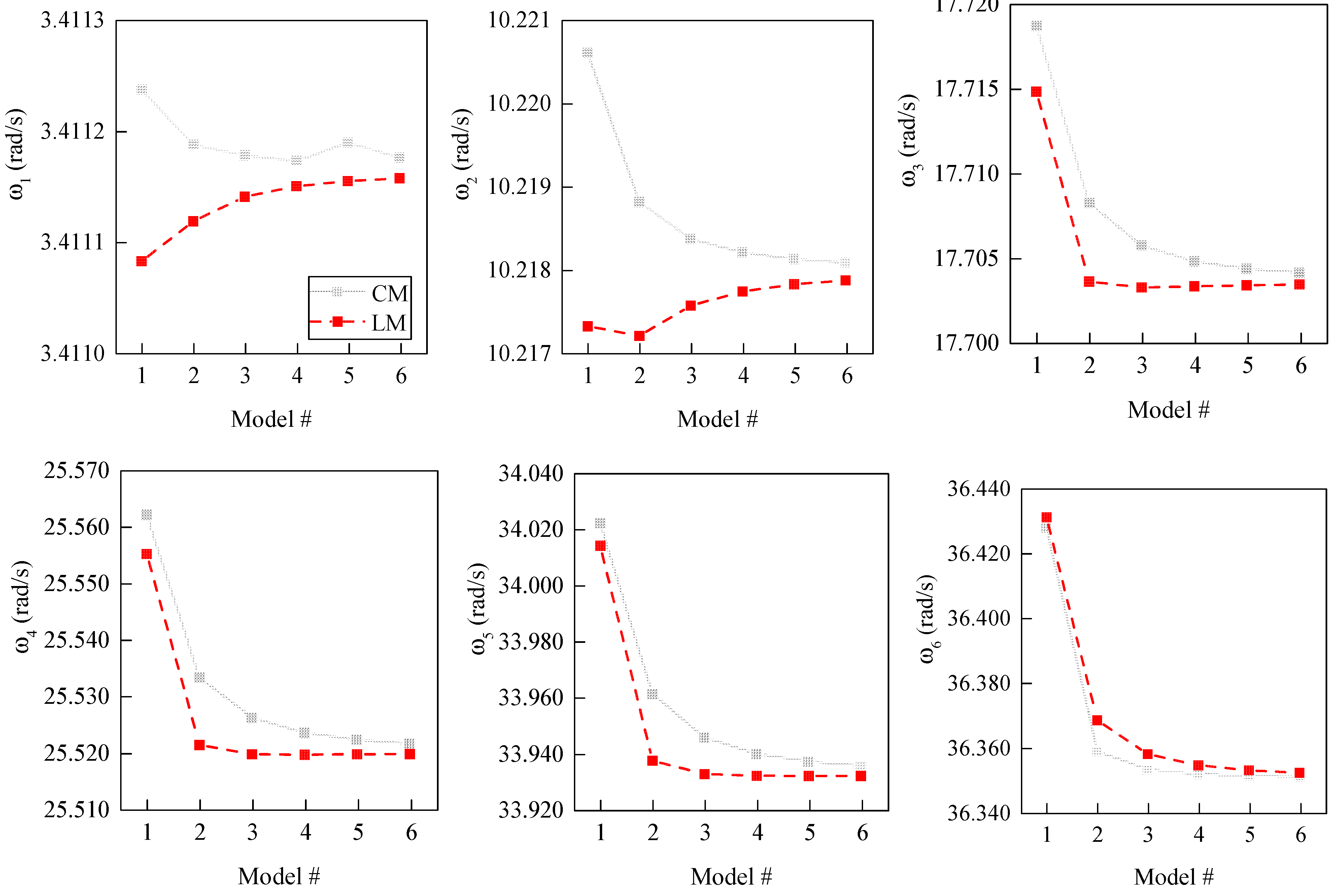
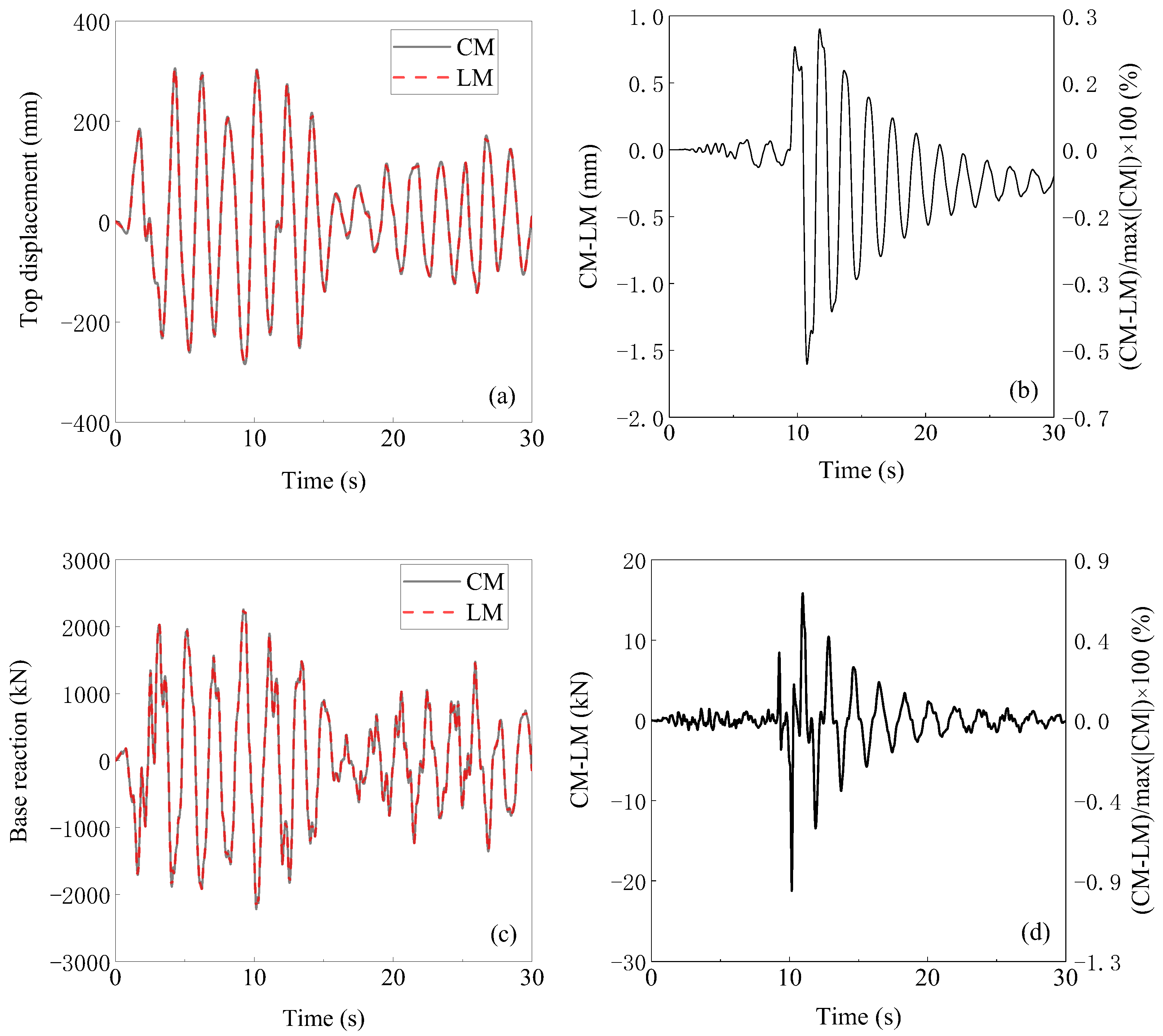
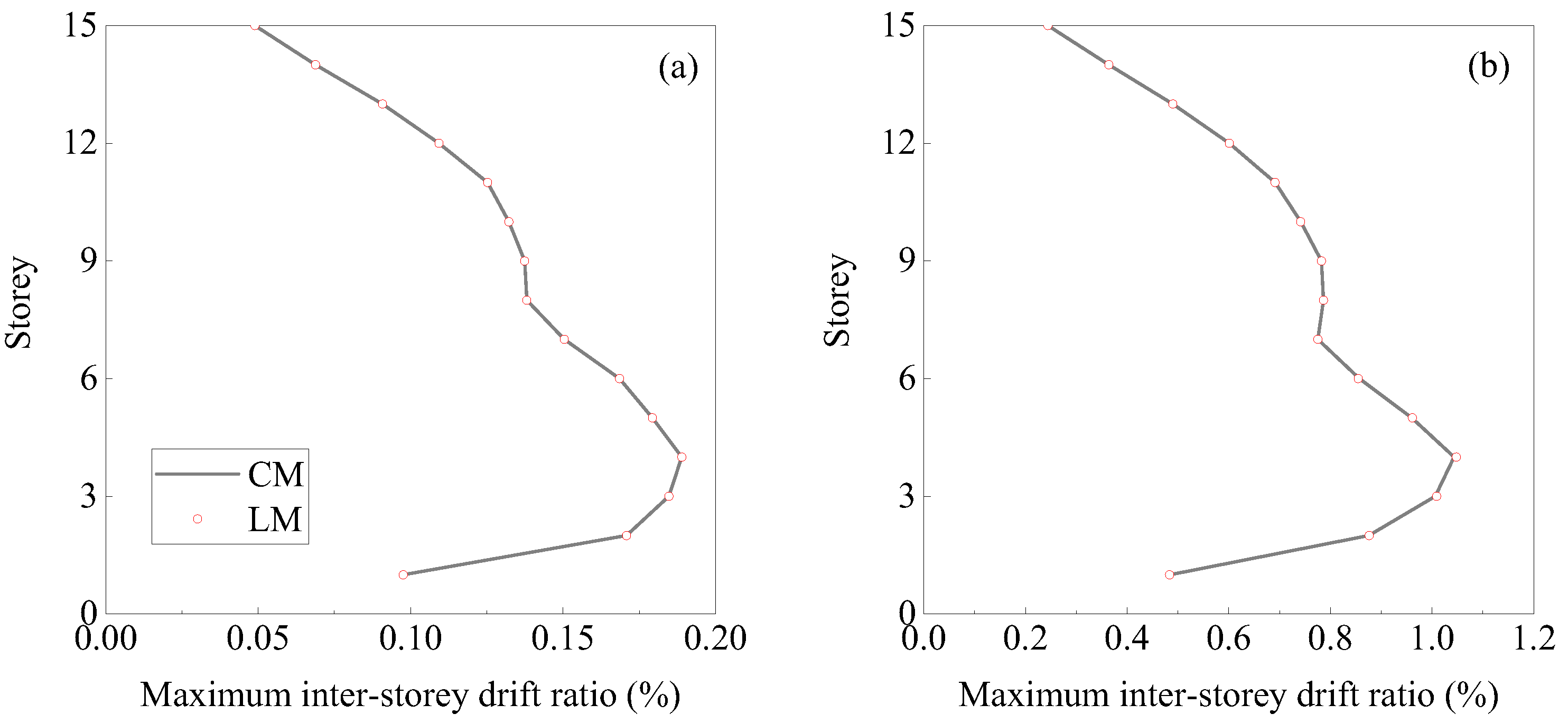
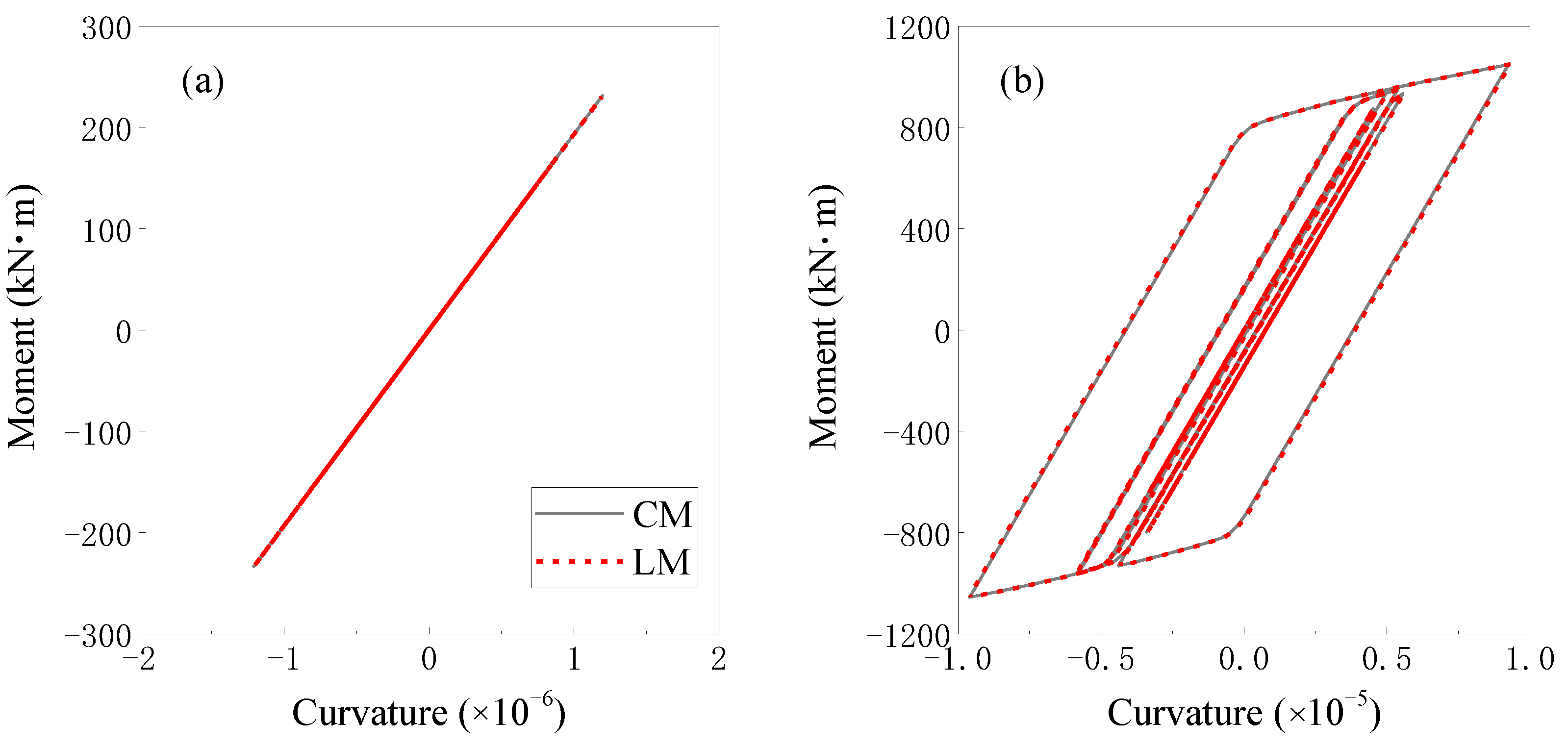
5.2.2. Comparison between the Employment of CM and LM Matrices
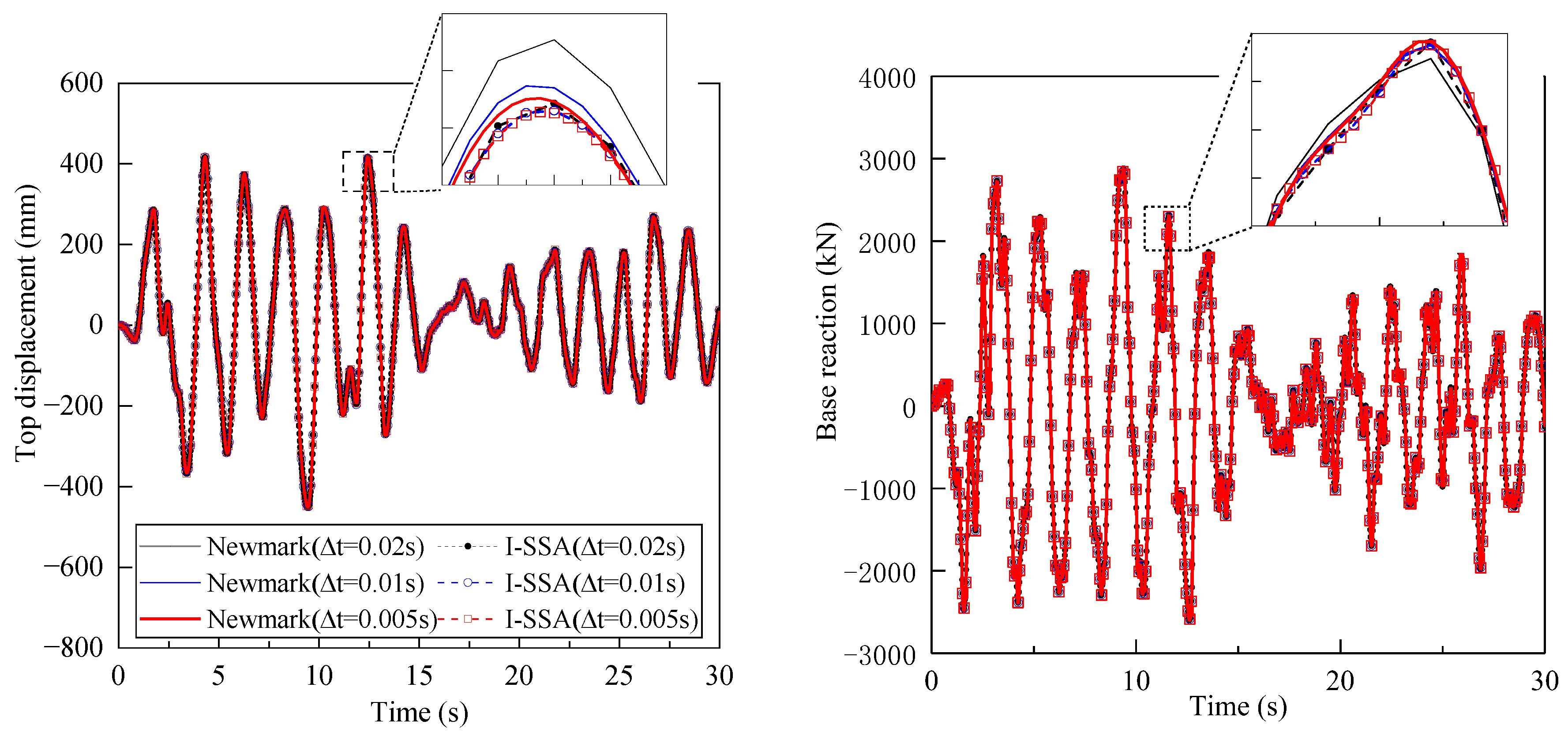
5.2.3. Study of Numerical Accuracy
5.2.4. Influence of Mass Distribution
5.3. Fifteen-Storey Frame Equipped with LVDs
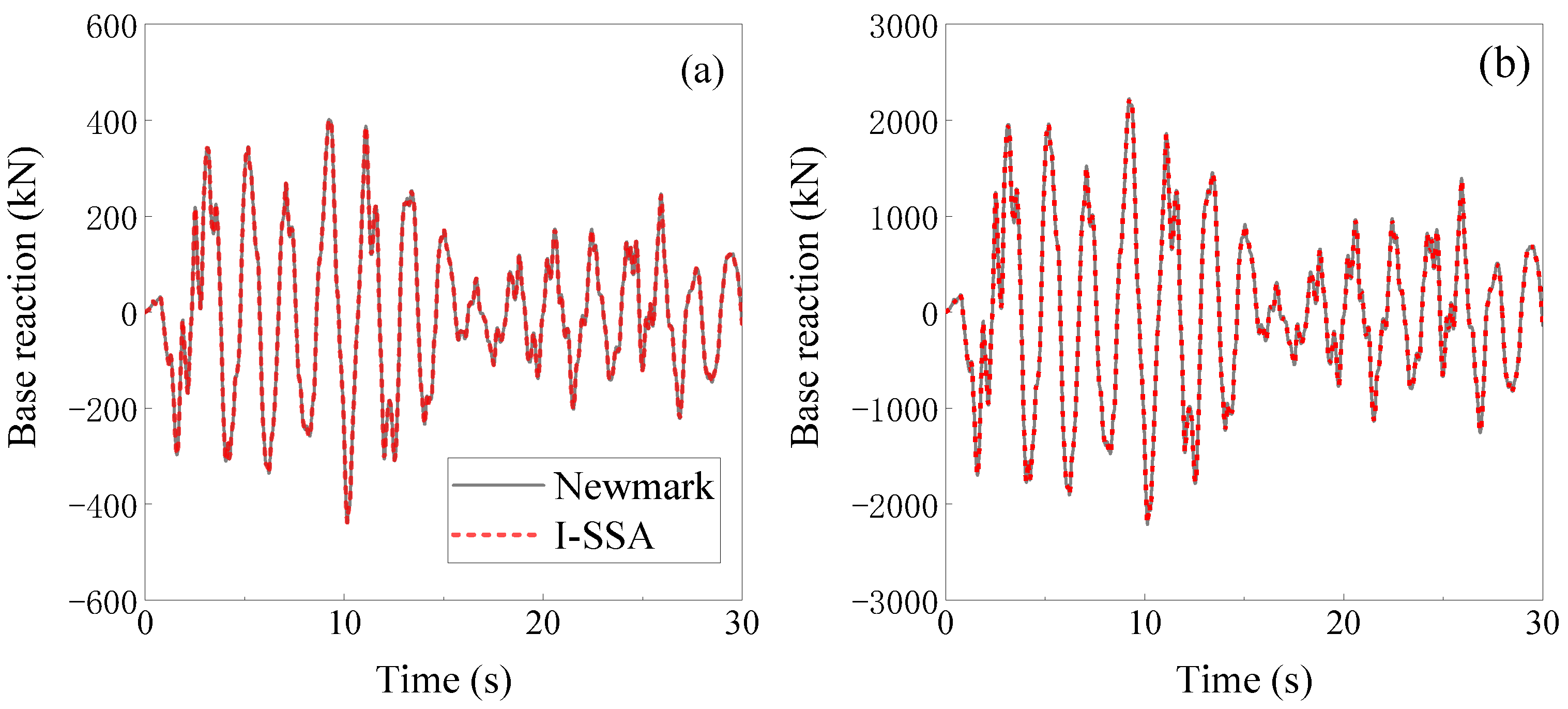
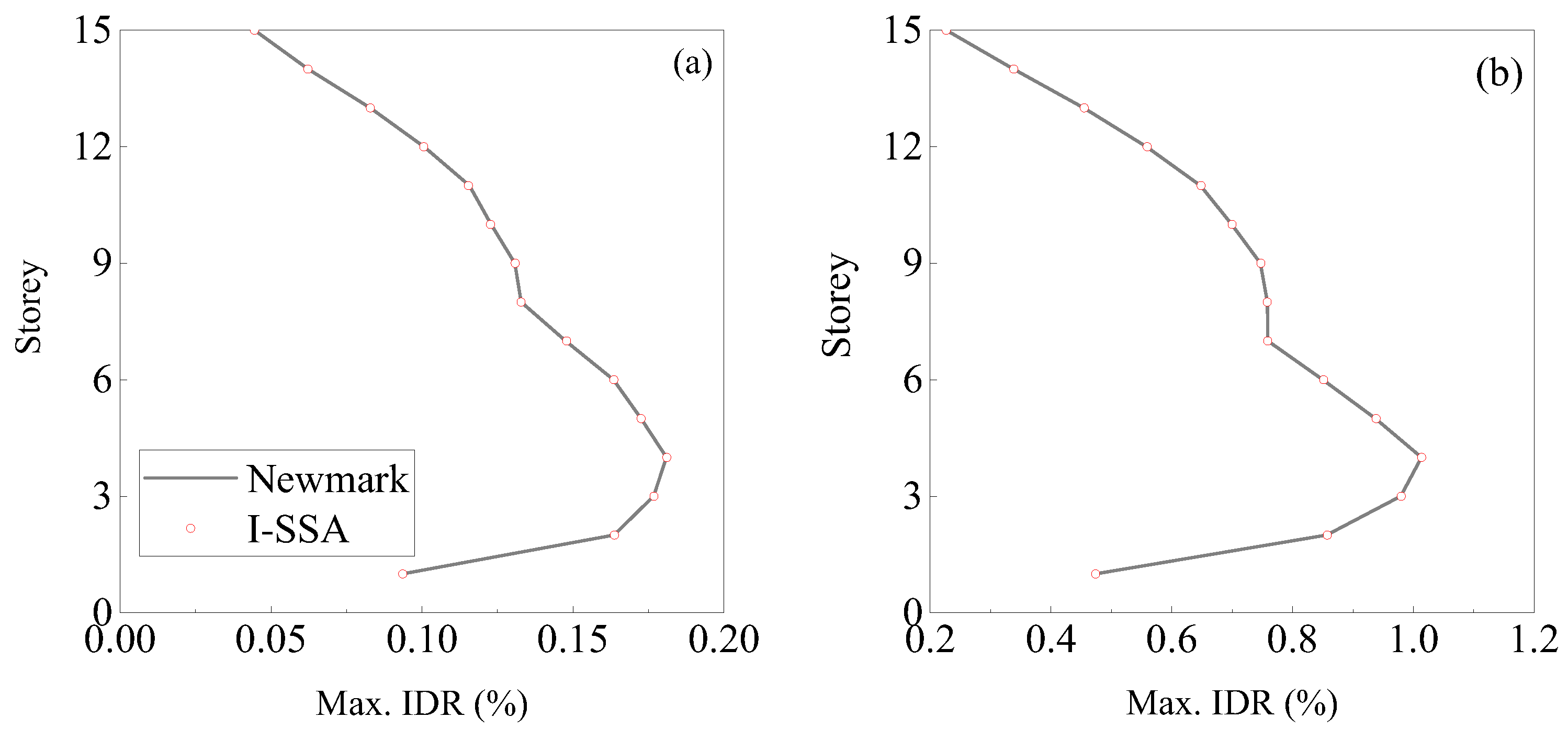
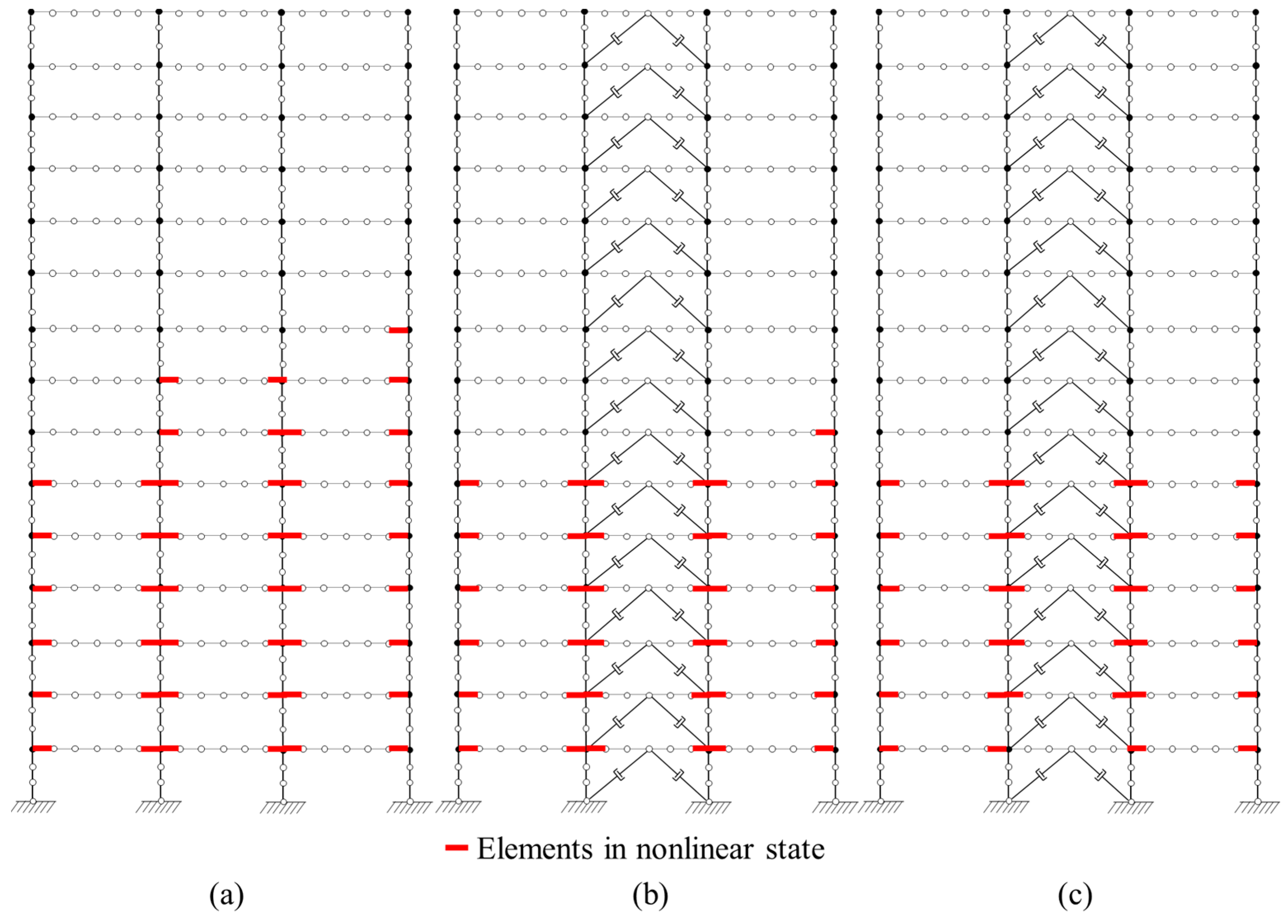
5.3.1. Investigation of Accuracy
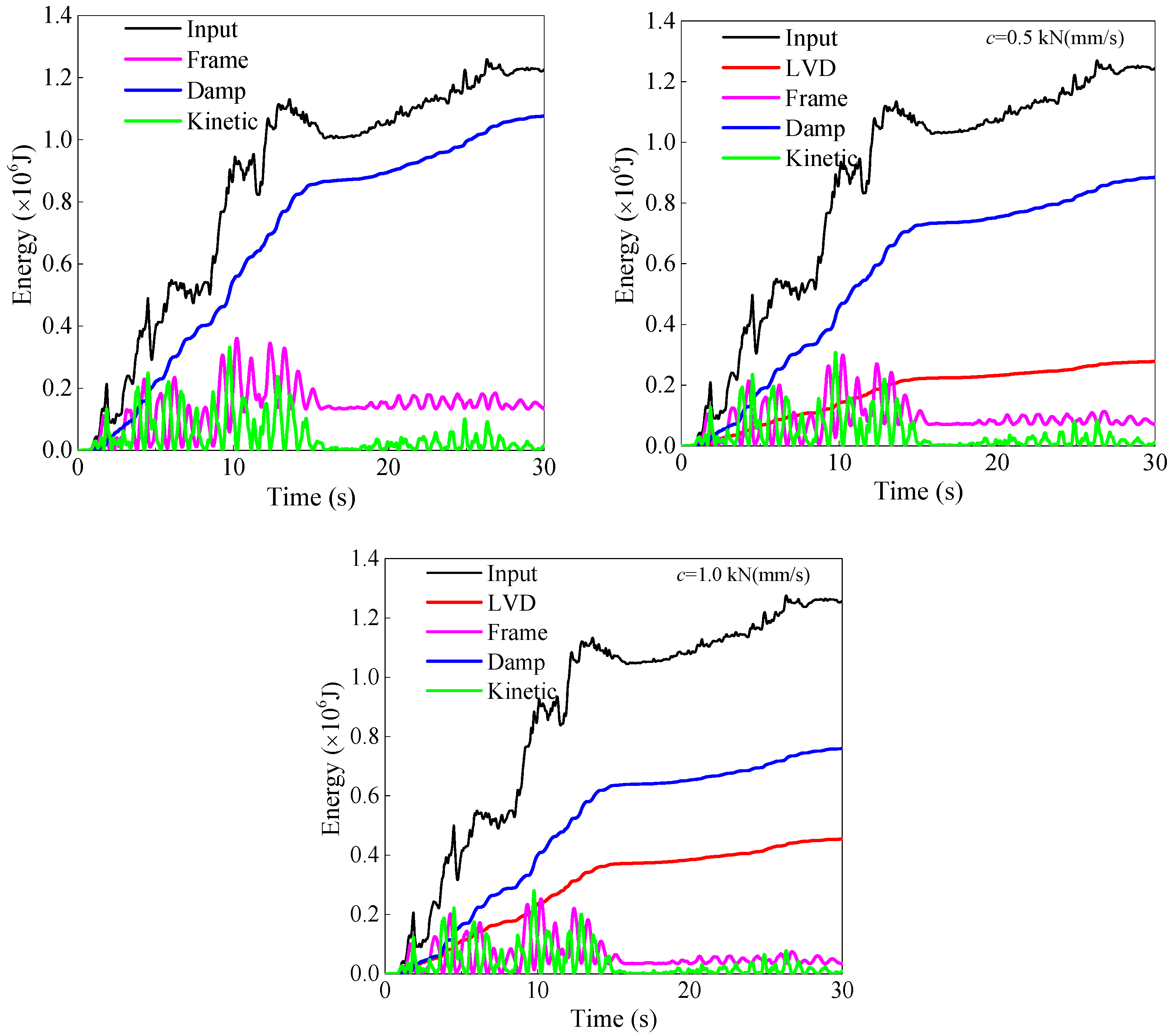
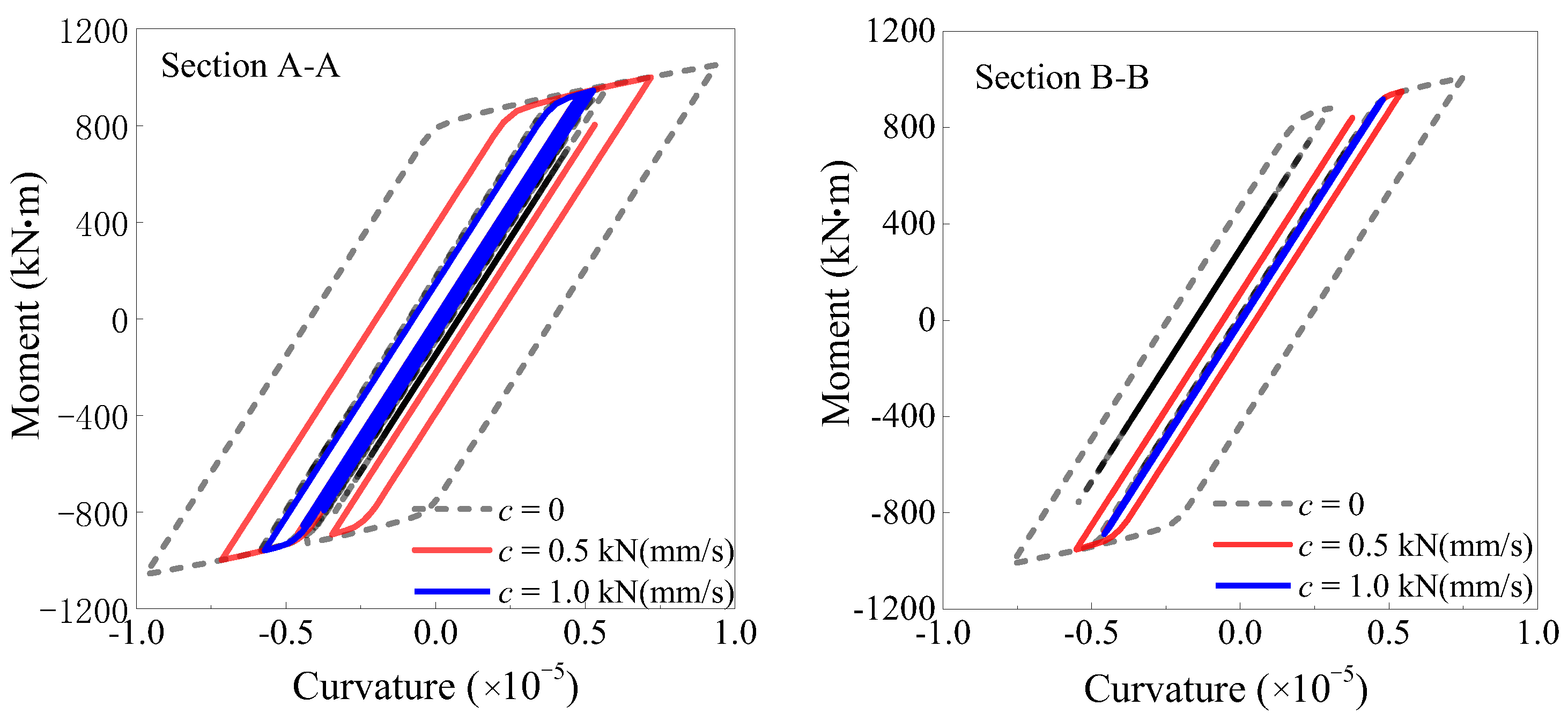
5.3.2. Effect of the Damping Coefficient of LVDs on Structural Response
6. Conclusions
- (1)
- The SSA exhibits superior accuracy and stability compared to conventional step-by-step integration methods, such as the Newmark method, especially for systems with low damping ratios and high stiffness. In linear single-degree-of-freedom systems with small damping ratios and periods, the Newmark method exhibits higher sensitivity to the time step, whereas the SSA is more robust.
- (2)
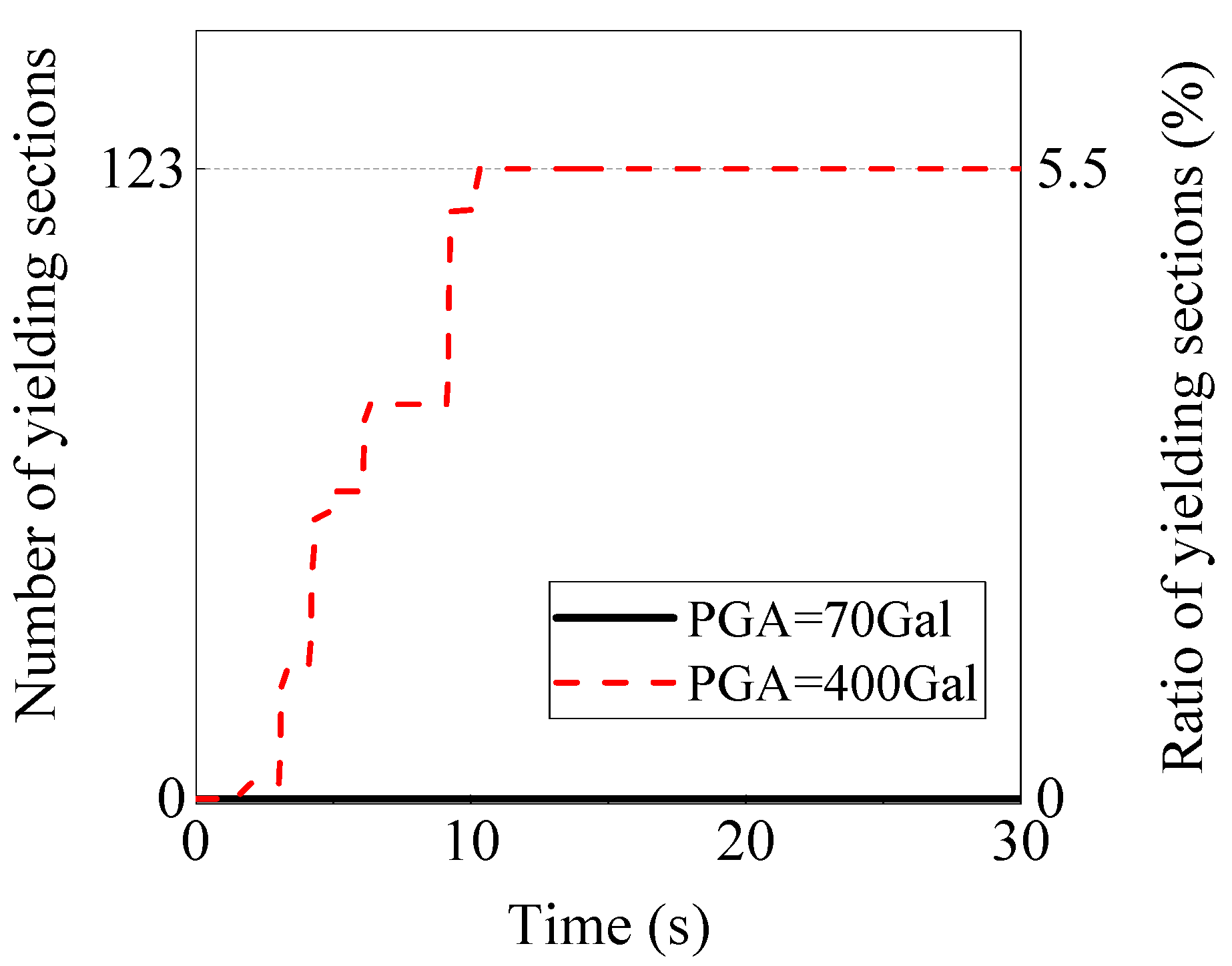
- The choice of mass matrix has a negligible impact on the simulation predictions of the I-SSA. For instance, in the case of the 15-storey plane steel frame, the angular frequency, global, and local responses computed using the lumped mass (LM) matrix closely align with those obtained using the consistent mass (CM) matrix. Simultaneously, numerical simulations using various LM matrices yield highly similar results. Under PGAs of 70, 400, and 620 Gal, the relative errors when using an LM matrix compared to the CM matrix are 1.13% for the maximum top displacement, 0.36% for the maximum base reaction, and 2.33% for the maximum IDR. Additionally, the root-mean-square errors for top displacement and base reaction time histories are generally less than 1%, indicating that the simulation predictions using the LM matrices are highly consistent with those obtained from the CM matrix.
- (3)
- The use of the LM matrix can significantly reduce the dimensionality of the governing equation in the I-SSA. Unlike the CM matrix, which results in a full-rank structural mass matrix and a state-space equation dimension twice that of the structural degrees of freedom, the LM-based approach assigns zero masses to many nodes (or degrees of freedom), effectively reducing the effective dimensions of the equation. The numerical results in this study demonstrate that the simulation outcomes for the 15-storey plane steel frame using an LM mass matrix of size 30 × 30, which significantly reduces the dimensionality of the control equations, are nearly identical to those obtained using a CM matrix of size 1215 × 1215.
- (4)
- The LM-based I-SSA shows promising theoretical efficiency and substantial potential for dynamic analysis of large-scale structures. By reducing the computational complexity through the LM matrix, the method offers efficient analysis capabilities for extensive structural systems.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, B.; Bao, H.; Ou, J.; Tian, S. Stability and accuracy analysis of the central difference method for real-time substructure testing. Earthq. Eng. Struct. Dyn. 2005, 34, 705–718. [Google Scholar] [CrossRef]
- Akbar Gholampour, A.; Ghassemieh, M.; Karimi-Rad, M. A new unconditionally stable time integration method for analysis of nonlinear structural dynamics. J. Appl. Mech. 2013, 80, 021024. [Google Scholar] [CrossRef]
- Ozkul, T.A. A finite element formulation for dynamic analysis of shells of general shape by using the Wilson-θ method. Thin-Walled Struct. 2004, 42, 497–513. [Google Scholar] [CrossRef]
- Kim, W. Improved two-stage implicit time integration methods with unconventionally determined parameters for analyses of linear and nonlinear structural dynamics. Nonlinear Dyn. 2024, 112, 1221–1259. [Google Scholar] [CrossRef]
- Mosqueda, G.; Ahmadizadeh, M. Iterative implicit integration procedure for hybrid simulation of large nonlinear structures. Earthq. Eng. Struct. Dyn. 2011, 40, 945–960. [Google Scholar] [CrossRef]
- Jain, S.; Tiso, P.; Rutzmoser, J.B.; Rixen, D.J. A quadratic manifold for model order reduction of nonlinear structural dynamics. Comput. Struct. 2017, 188, 80–94. [Google Scholar] [CrossRef]
- Amini, A.M.; Dureisseix, D.; Cartraud, P. Multi-Scale domain decomposition method for large-scale structural analysis with a zooming technique: Application to plate assembly. Int. J. Numer. Methods Eng. 2009, 79, 417–443. [Google Scholar] [CrossRef]
- Sun, B.; Zeng, Z.; Sun, T.; Shen, W.; Ou, J. An efficient reduced-order multi-scale simulation approach for nonlinear analysis of frame structures with nonlinear localization. J. Earthq. Eng. 2024, 28, 325–348. [Google Scholar] [CrossRef]
- Lopez Almansa, F.; Barbat, A.H.; Rodellar, J. SSP algorithm for linear and non-linear dynamic response simulation. Int. J. Numer. Methods Eng. 1988, 26, 2687–2706. [Google Scholar] [CrossRef]
- Xu, L.; Zhai, W.; Zhu, S.; Liu, W. An efficient method for train–track–substructure dynamic interaction analysis by implicit-explicit integration and multi-time-step solution. Railw. Eng. Sci. 2023, 31, 20–36. [Google Scholar] [CrossRef]
- Clough, R.W.; Penzien, J.; Griffin, D.S. Dynamics of Structures; Computers & Structures, Inc.: Berkeley, CA, USA, 1993. [Google Scholar]
- Zhang, J.; Liu, Y.; Liu, D. Accuracy of a composite implicit time integration scheme for structural dynamics. Int. J. Numer. Methods Eng. 2017, 109, 368–406. [Google Scholar] [CrossRef]
- Fritzen, P.; Wittekindt, J. Numerical solution of viscoplastic constitutive equations with internal state variables Part I: Algorithms and implementation. Math. Method Appl. Sci. 1997, 20, 1411–1425. [Google Scholar] [CrossRef]
- Simeonov, V.K.; Sivaselvan, M.V.; Reinhorn, A.M. Nonlinear analysis of structural frame systems by the state-space approach. Comput. Aided Civ. Infrastruct. Eng. 2000, 15, 76–89. [Google Scholar] [CrossRef]
- Wang, Y.; Liao, W.; Lee, C. A state-space approach for dynamic analysis of sliding structures. Eng. Struct. 2001, 23, 790–801. [Google Scholar] [CrossRef]
- Sivaselvan, M.V.; Reinhorn, A.M. Collapse analysis: Large inelastic deformations analysis of planar frames. J. Struct. Eng. 2002, 128, 1575–1583. [Google Scholar] [CrossRef]
- Sivaselvan M, V. Nonlinear Structural Analysis towards Collapse Simulation: A Dynamical Systems Approach; State University of New York at Buffalo: Buffalo, NY, USA, 2003; pp. 27–41. [Google Scholar]
- Lu, L.; Chung, L.; Wu, L.; Lin, G. Dynamic analysis of structures with friction devices using discrete-time state-space formulation. Comput. Struct. 2006, 84, 1049–1071. [Google Scholar] [CrossRef]
- Kildashti, K.; Mirghaderi, R. Assessment of seismic behaviour of SMRFs with RBS connections by means of mixed-based state-space approach. Struct. Des. Tall Spec. Build. 2009, 18, 485–505. [Google Scholar] [CrossRef]
- Jafari, V.; Rahimian, M.; Vahdani, S.H. Improved formulation in mixed-based state-space approach for large displacement inelastic analysis of frames. J. Eng. Mech. 2011, 137, 196–204. [Google Scholar] [CrossRef]
- Amir, M.; Papakonstantinou, K.G.; Warn, G.P. State-Space Formulation for Structural Analysis with Coupled Degradation-Plasticity and Geometric Nonlinearity. J. Struct. Eng. 2022, 148, 04022016. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Y.; Wang, G.; Yang, B.; Xu, R. Dynamic analysis of RC beams externally bonded with FRP plates using state space method. Eng. Struct. 2022, 253, 113788. [Google Scholar] [CrossRef]
- Trujillo, D.M. The direct numerical integration of linear matrix differential equations using Padé approximations. Int. J. Numer. Methods Eng. 1975, 9, 259–270. [Google Scholar] [CrossRef]
- Rodellar, J.; Barbat, A.H. Numerical analysis of the seismic response. A state space approach. In Proceedings of the NUMETA’85 Conference, Swansea, UK, 7–11 January 1985; pp. 273–279. [Google Scholar]
- Wan-Xie, Z. On precise integration method. J. Comput. Appl. Math. 2004, 163, 59–78. [Google Scholar] [CrossRef]
- Simo, J.C.; Hughes, T.J.R. Computational Inelasticity; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Yang, J.B.; Jiang, L.J.; Chen, D.C.H. Dynamic modelling and control of a rotating Euler–Bernoulli beam. J. Sound Vib. 2004, 274, 863–875. [Google Scholar] [CrossRef]
- Naeim, F. Dynamics of structures-theory and applications to earthquake engineering. Earthq. Spectra 2007, 23, 491–492. [Google Scholar] [CrossRef]
- Sun, B.; Zeng, Z.; Zhang, Y.; Shen, W.; Ou, J. An effective geometric nonlinear analysis approach of framed structures with local material nonlinearities based on the reduced-order Newton-Raphson method. Soil Dyn. Earthq. Eng. 2023, 172, 107991. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Period (s) | 1.25 | 0.41 | 0.24 | 0.17 | 0.13 |
| Angular frequency (rad/s) | 3.41 | 15.26 | 26.17 | 37.22 | 48.85 |
| Case (PGA) | Mass Matrix | Method | Max. Top Disp. | Max. Base Reaction | Max. IDR | Disp. RMSE (%) | Reaction RMSE (%) | |||
|---|---|---|---|---|---|---|---|---|---|---|
| Value (mm) | Relative Error (%) | Value (kN) | Relative Error (%) | Value (%) | Relative Error (%) | |||||
| 70 | CM | SSA | 57.41 | -- | 455.40 | -- | 0.189 | -- | -- | -- |
| LM | I-SSA | 57.41 | −0.01 | 455.32 | 0.02 | 0.189 | 0.00 | 0.01 | 0.02 | |
| 400 | CM | SSA | 305.52 | -- | 2259.10 | -- | 1.044 | -- | -- | -- |
| LM | I-SSA | 305.50 | 0.01 | 2252.25 | 0.30 | 1.048 | −0.41 | 0.14 | 0.13 | |
| Time Step (s) | Method | Max. Top Disp. | Max. Base Reaction | Max. IDR | Disp. RMSE (%) | Reaction RMSE (%) | |||
|---|---|---|---|---|---|---|---|---|---|
| Value (mm) | Relative Error (%) | Value (kN) | Relative Error (%) | Value (%) | Relative Error (%) | ||||
| 0.02 | Newmark | 450.12 | 0.77 | 2874.6 | 0.27 | 1.823 | 1.10 | 0.52 | 0.74 |
| I-SSA | 452.75 | 2882.3 | 1.845 | ||||||
| 0.01 | Newmark | 449.85 | 0.80 | 2880.3 | −0.02 | 1.822 | 1.09 | 0.52 | 0.49 |
| I-SSA | 452.46 | 2879.7 | 1.845 | ||||||
| 0.005 | Newmark | 449.82 | 0.81 | 2881.1 | −0.07 | 1.822 | 1.11 | 0.53 | 0.49 |
| I-SSA | 452.44 | 2879.0 | 1.845 | ||||||
| Case (PGA) | Mass Matrix | Top Disp. | Base Reaction | Max. IDR | Disp. RMSE (%) | Reaction RMSE (%) | |||
|---|---|---|---|---|---|---|---|---|---|
| Max. (mm) | Error (%) | Max. (kN) | Error (%) | Max. (%) | Error (%) | ||||
| 70 | CM | 57.41 | -- | 455.40 | -- | 0.19 | -- | -- | -- |
| LM1 | 57.41 | −0.01 | 455.32 | 0.02 | 0.19 | −0.00 | 0.01 | 0.02 | |
| LM2 | 57.43 | −0.04 | 455.51 | −0.02 | 0.19 | −0.02 | 0.03 | 0.09 | |
| LM3 | 57.45 | −0.07 | 455.52 | −0.03 | 0.19 | 0.03 | 0.07 | 0.22 | |
| 400 | CM | 305.52 | -- | 2259.10 | -- | 1.04 | -- | -- | -- |
| LM1 | 305.50 | 0.01 | 2252.30 | 0.30 | 1.05 | −0.41 | 0.14 | 0.13 | |
| LM2 | 305.48 | 0.02 | 2244.55 | 0.64 | 1.05 | −0.77 | 0.26 | 0.27 | |
| LM3 | 305.33 | 0.06 | 2246.74 | 0.55 | 1.05 | −0.74 | 0.29 | 0.35 | |
| 620 | CM | 450.26 | -- | 2883.61 | -- | 1.82 | -- | -- | -- |
| LM1 | 452.75 | −0.55 | 2882.28 | 0.05 | 1.85 | −1.27 | 0.54 | 0.50 | |
| LM2 | 455.32 | −1.13 | 2893.95 | −0.36 | 1.86 | −2.29 | 0.97 | 0.92 | |
| LM3 | 454.97 | −1.05 | 2890.11 | −0.23 | 1.86 | −2.33 | 1.03 | 1.00 | |
| Mass Matrix Type | CM | LM1 | LM2 | LM3 |
|---|---|---|---|---|
| Sizes of mass matrix | 1215 × 1215 | 810 × 810 | 120 × 120 | 30 × 30 |
| Sizes of transition matrix | 2430 × 2430 | 1620 × 1620 | 240 × 240 | 60 × 60 |
| c (kN/(mm/s)) | Top Disp. | Top Vel. | ||
| Max. Value (mm) | Relative Error | Max. Value (mm/s) | Relative Error | |
| 0.00 | 305.33 | -- | 1271.58 | -- |
| 0.50 | 294.79 | 3.45% | 1192.61 | 6.21% |
| 1.00 | 282.21 | 7.57% | 1130.95 | 11.06% |
| c (kN/(mm/s)) | Base Reaction | Max. IDR | ||
| Max. Value (kN) | Relative Error | Max. Value (%) | Relative Error | |
| 0.00 | 2246.74 | -- | 1.05 | -- |
| 0.50 | 2169.30 | 3.45% | 0.97 | 7.62% |
| 1.00 | 2105.61 | 6.28% | 0.89 | 15.17% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Xuan, J.; Gao, L.; Wang, K.; Ou, J. Improved State-Space Approach Based on Lumped Mass Matrix for Transient Analysis of Large-Scale Locally Nonlinear Structures. Buildings 2024, 14, 2735. https://doi.org/10.3390/buildings14092735
Sun B, Xuan J, Gao L, Wang K, Ou J. Improved State-Space Approach Based on Lumped Mass Matrix for Transient Analysis of Large-Scale Locally Nonlinear Structures. Buildings. 2024; 14(9):2735. https://doi.org/10.3390/buildings14092735
Chicago/Turabian StyleSun, Baoyin, Jiaheng Xuan, Long Gao, Kai Wang, and Jinping Ou. 2024. "Improved State-Space Approach Based on Lumped Mass Matrix for Transient Analysis of Large-Scale Locally Nonlinear Structures" Buildings 14, no. 9: 2735. https://doi.org/10.3390/buildings14092735
APA StyleSun, B., Xuan, J., Gao, L., Wang, K., & Ou, J. (2024). Improved State-Space Approach Based on Lumped Mass Matrix for Transient Analysis of Large-Scale Locally Nonlinear Structures. Buildings, 14(9), 2735. https://doi.org/10.3390/buildings14092735